1. Introduction
The proportional-integral-derivative (PID) controller is widely used in industry with the characteristics of a simple structure and strong robustness [
1]. In thermodynamic systems, the characteristic parameters of each thermal plant often change in different operation conditions, so the fixed controller parameters cannot always meet the control requirements [
2]. The fast self-tuning PID algorithm can adjust parameters of controllers online according to the characteristics of the controlled plant, maintaining the stability, rapidity and robustness of the control system. In thermal power plants, process plants usually exhibit first order plus dead time (FOPDT) characteristics, while larger delay times increase the difficulty of self-tuning control.
Ziegler and Nichols first proposed the critical proportional band method [
3] for the industrial PID controller tuning, which was recognized and applied by the majority of engineers. The robustness and stability of the controllers after tuning meet certain engineering requirements. However, the method requires engineers to set the parameters online according to the experimental results. In this case, the controlled plant needs to be excited to generate a critical oscillation, which seriously affects the safety and stability of the system. In response to this shortcoming, Karl Aström and Hägglund et al. proposed the relay characteristic method [
4] in 1984, using a relay to limit the amplitude of the modulated oscillation, and realizing the online self-tuning of PID parameters, thus reducing the workload of engineers. It is necessary to analyze the relay characteristics by using the description function method in nonlinear analysis, but there is a certain error in determining the critical point information. Moreover, the control effect has deviation by using information of only one critical point to calculate the controller parameters.
There are three main kinds of tuning methods for relay characteristics, namely the Ziegler–Nichols (Z-N) formula tuning, amplitude margin tuning and phase angle margin tuning [
4,
5]. Several studies have implemented Z-N formula tuning for actual plants. For example, in [
6,
7] the authors applied the tuning algorithm based on the ideal relay and Z-N formula to the control of the Buck-Boost circuit and the resistance box temperature, respectively, and put the basic relay characteristic method into practice. However, they did not consider the impact of noise on the actual environment. In [
8], the hysteresis relay was used to remove the influence of a certain amplitude noise in the system. The software platform was developed to operate and supervise the parameter tuning process, and was then successfully applied into the network control system, however, there was no comparison of the algorithm effectiveness. Gu Dake et al. [
9] proposed a relay feedback self-tuning method based on model parameters. The simulation experiment verified the proposed method and proved that the relay feedback method based on model parameters has a better control effect than the Z-N method in cascade control. In terms of the amplitude margin and phase angle margin settings, Chen Fuxiang et al. [
10] proposed a PID parameter tuning method based on phase margin (PM). The researchers combined the system oscillation information, which was obtained under the hysteresis relay control loop, and the target phase angle margin to design the controller parameters. Chai Tianyou et al. [
11] proposed a self-tuning method based on amplitude margin and phase margin (SPAM), combining oscillation information with amplitude margin and phase margin to obtain PID controller parameters. In [
12], a pure delay link and a filter were added to the loop of the target phase angle margin tuning, and the delay time was changed repeatedly to obtain multiple critical point information, thereby improving the accuracy of the PM method. However, multiple operations of the tuning loop would reduce the setting efficiency and even affect the working state of the controlled plant, which was not conducive to engineering applications.
On the basis of the PID self-tuning principle, the researchers also combined the relay characteristic method with intelligent algorithms such as the neural network [
13], fuzzy control [
14] and Gauss algorithm [
15], and proposed various modified schemes to improve the control effect of the controller. However, they increased the complexity of the algorithm and reduced the setting speed, which was inconsistent with the original intention of the simple PID controller. Another study [
15] combined the Gauss algorithm with self-tuning to improve the control effect during the actual operation of the electric motor, but the implementation of the Gauss algorithm in the field would increase the economic cost and technical cost. In the thermal field, PID self-tuning is only a coarse adjustment method; the tuning process only needs to meet the operational safety and stability, and the control effect of the set controller is not strictly required. Therefore, the simple and direct PID self-tuning method based on relay characteristics can meet engineering requirements.
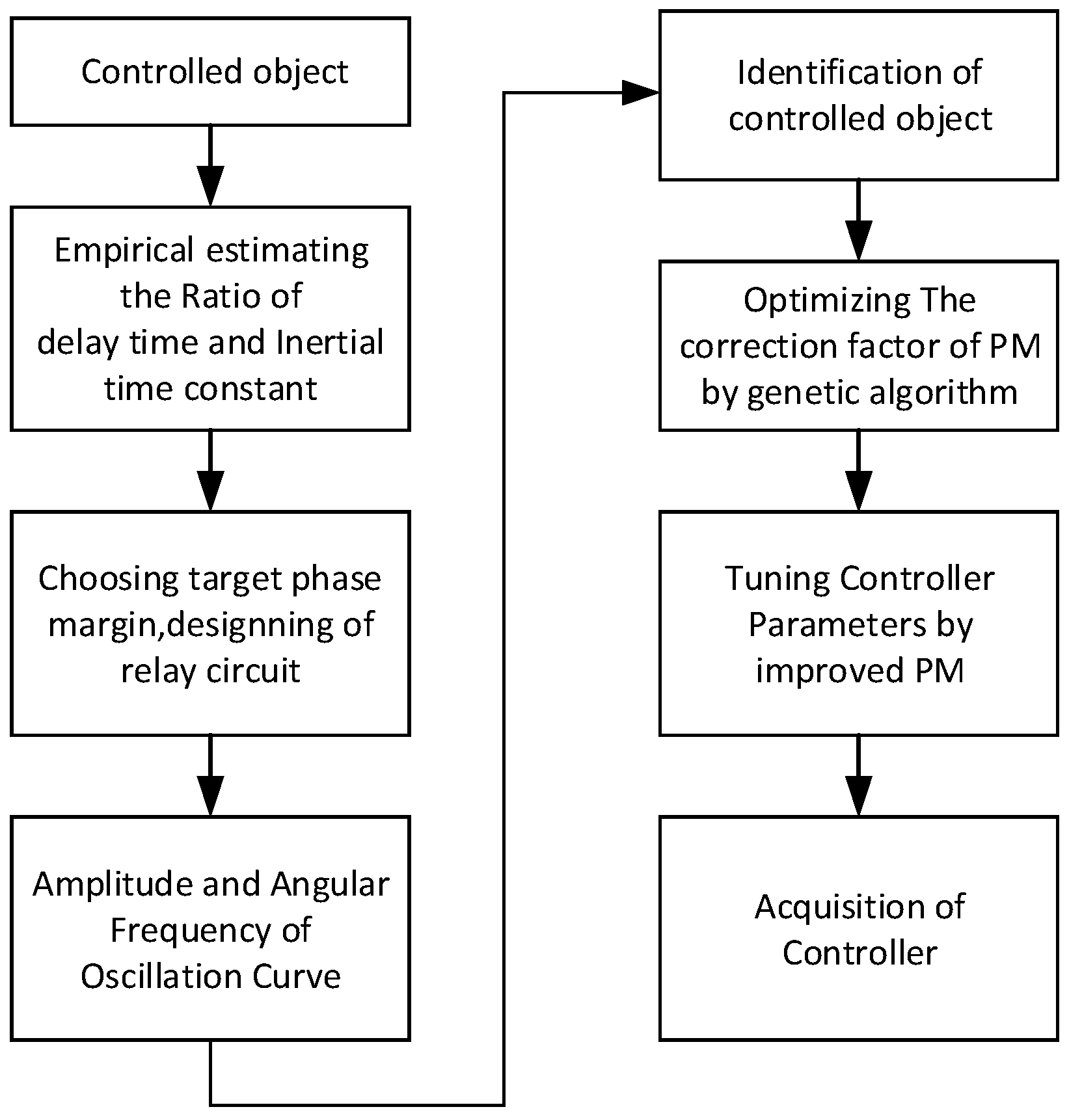
In the basic relay characteristic tuning methods, when compared with the Z-N formula setting, the PM method has a higher stability and also overshoot and oscillation times of the control curve are lower. Compared with the SPAM method, the PM method does not need to set a target amplitude margin and has no requirement for the amplitude margin of the controlled plant. However, the PM method cannot fix the thermal plant that does not meet the conditions of the relay characteristic method, such as the first-order inertia link. In addition, for the controlled plant with large delay characteristics, the control effect obtained by the PM method self-tuning is not satisfactory. Therefore, based on the traditional PM self-tuning method, this paper proposes an improved algorithm. It optimizes the selection range of the target phase angle margin by frequency characteristic analysis, then obtains a solution to estimate the target phase angle margin. The parameters of the oscillation curve output of the relay loop are used for model identification to obtain the transfer function of the control object. Then, the optimum algorithm is used to work out the correction coefficient of the PM method auto-tuning formula, and satisfactory controller parameters are obtained.
Hereinafter,
Section 2 briefly introduces the basic principles of the traditional PM method and its shortcomings in the FOPDT plant.
Section 3 analyzes the function of the target phase angle margin in the tuning process, and designs the correction factor from the tuning formula by the optimum algorithm.
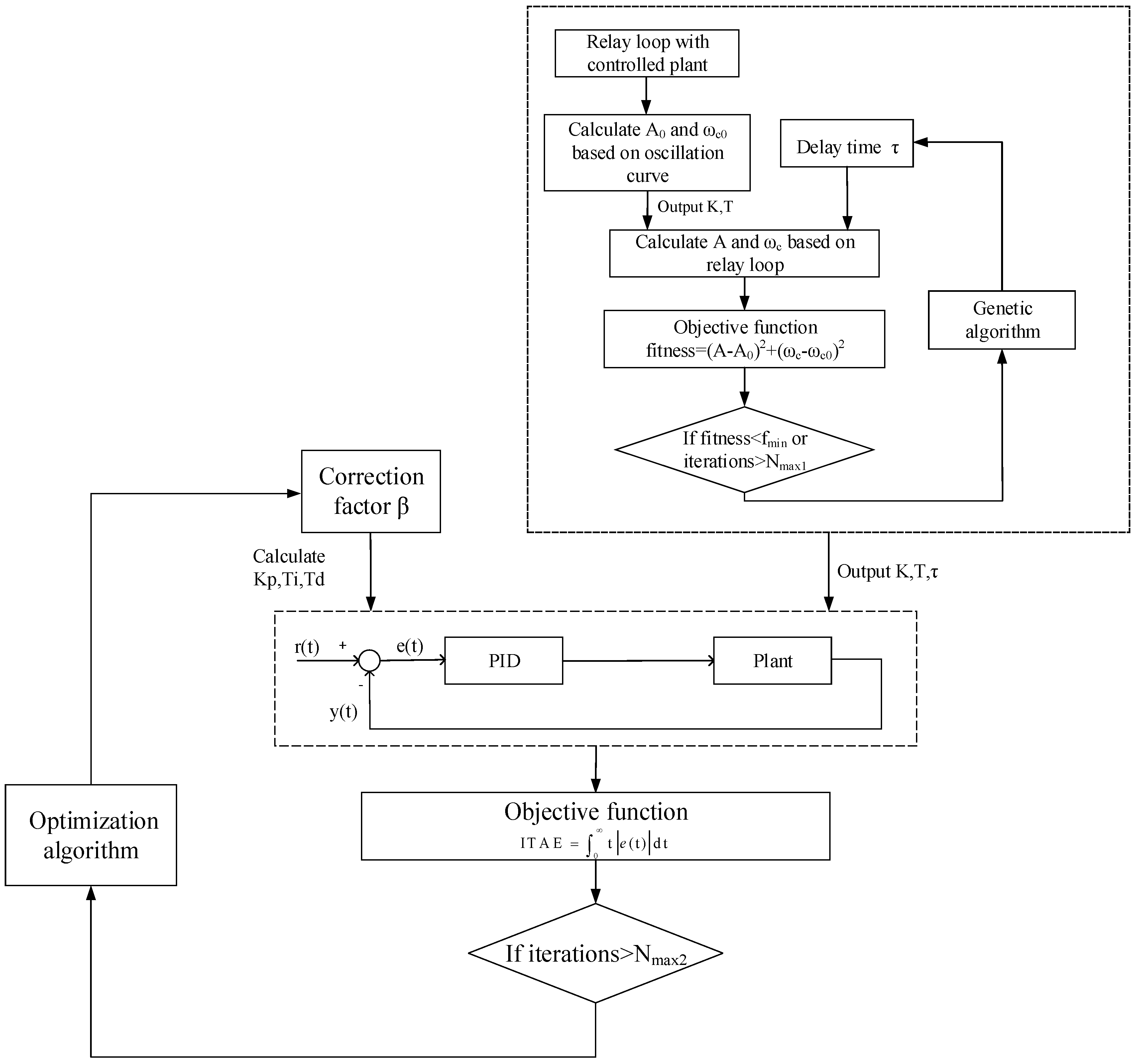
Section 4 simulates the superiority of the improved algorithm. Finally, the last section summarizes the characteristics of the improved PM self-tuning algorithm. The improved algorithm of the PID auto-tuning controller based on phase angle margin is shown in
Figure 1.
2. Basic Principles and Disadvantages of the Traditional PM Method
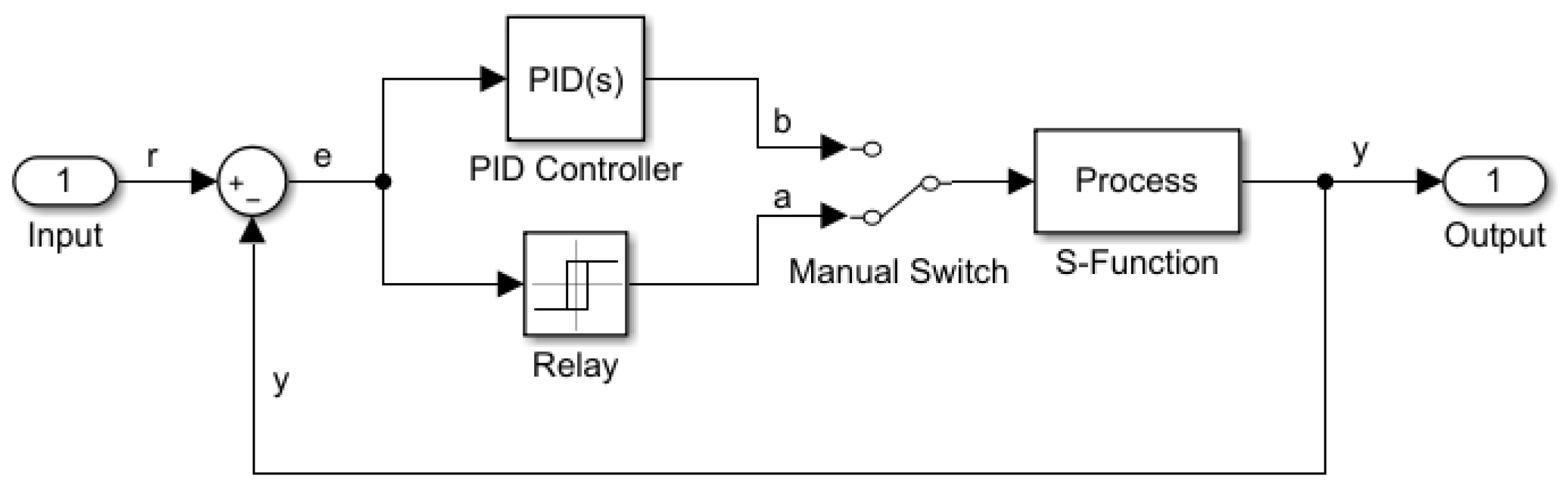
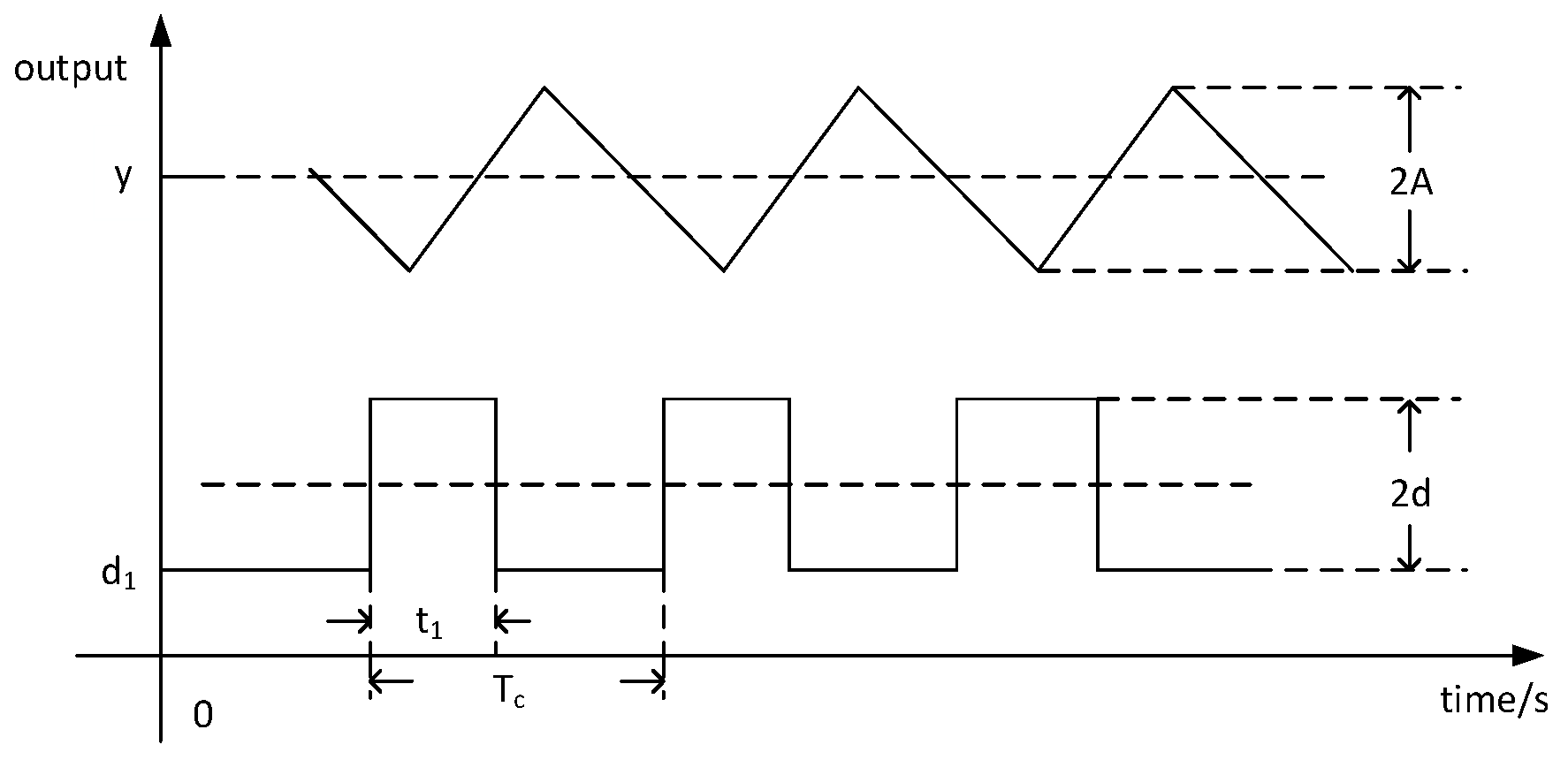
Figure 2 shows the auto-tuning principle of PID parameters based on the PM method. The process of calculating the controller auto-tuning parameters by the PM method is as follows: When the switch is thrown at terminal a, the hysteresis relay and the controlled plant form a unit negative feedback control loop. Select a set of relay thresholds and dead zones that can allow the system to output an oscillation curve under the action of the relay, and use the amplitude and period of the oscillation curve to estimate the coordinates of the critical point in the complex plane. There is a set of PID controller parameters that cause the critical point to move to the unit circle under the PID control and to meet the target phase angle margin. This set of controller parameters can be determined by the critical point coordinates and the target phase angle margin.
In
Figure 2,
r is the input,
e is the deviation of the system and
y is the output of the controller. The description function of the hysteresis relay is:
where
d is the output threshold value of the relay,
d > 0.
ε is the dead zone of relay,
ε > 0.
N(A) is the complex ratio of the first harmonic component and the input signal in the steady-state output of the relay under the action of sinusoidal signals.
A is the amplitude of sine signal,
A >
ε.
Set the transfer function of the controlled plant as
G(jω). When the switch is at terminal a, the closed-loop characteristic equation of the system is shown in Equation (2). The necessary condition for the limit oscillation of the system is that the equation below has a positive solution.
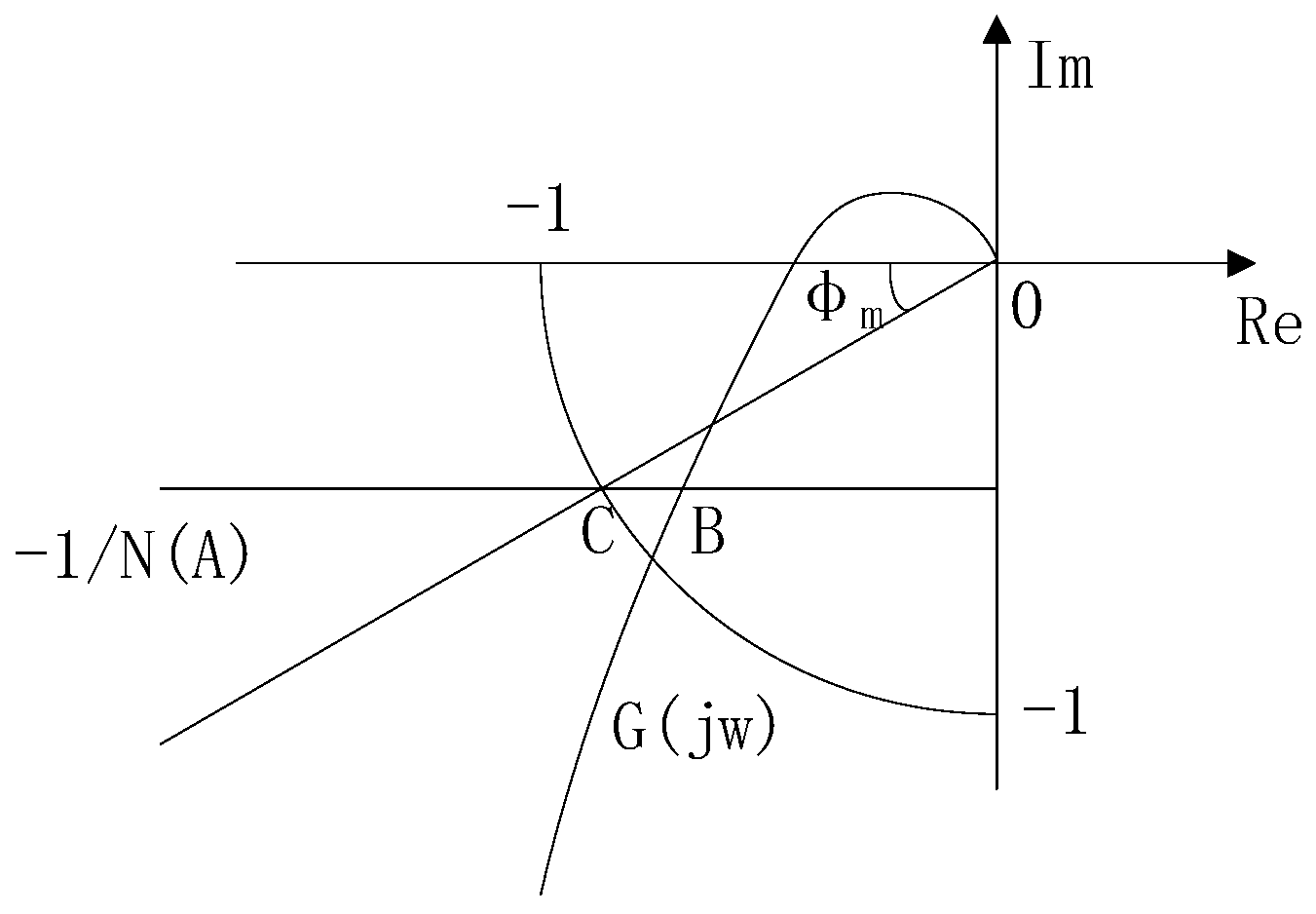
Figure 3 shows the Nyquist curve of the plant
G(jω) on the complex plane and the negative reciprocal description function
−1/N(A) curve of the hysteresis relay. The angular frequency where their intersection point B is located is the solution of Equation (2). Point
B is the self-excited oscillation point of the closed-loop system, also known as the critical point. The negative reciprocal description function of the relay comes as Equation (3), then the coordinates of point
B (
−x, −jy) can be expressed by Equation (4).
The form of the PID controller is shown in Equation (5). When the switch is thrown at terminal b (see
Figure 2), the forward channel transfer function of the system is shown in Equation (6). The controller makes the Nyquist curve of the controlled plant move along these directions:
,
and
, through proportional, derivative and integral actions, respectively. At a certain set of PID parameters, the critical point B can be moved to point
C which meets the target phase angle margin requirement.
Assuming that the target phase angle margin is
, the coordinate of point
C is
, so:
According to the coordinates of the
B and
C points in the complex plane and the vector relationship of the controller, the traditional PM method proposes the controller parameter tuning formula as follows:
where
d is the output threshold of the relay,
d > 0.
ε is the dead zone of the relay,
ε > 0.
A is the amplitude of sine curve when the controlled plant oscillates,
A >
ε.
T is an intermediate parameter.
α is the empirical coefficient, which is between 2 and 4.
β is the correction coefficient, and the traditional PM method takes the correction coefficient as 0.5.
In this paper, the PM method is applied to the auto-tuning of controlled plants in thermal power plants. It is found that because the controlled plants of thermal power plants generally have first-order inertia plus pure delay characteristics, the traditional PM method cannot guarantee good control effects. There are two main problems as follows.
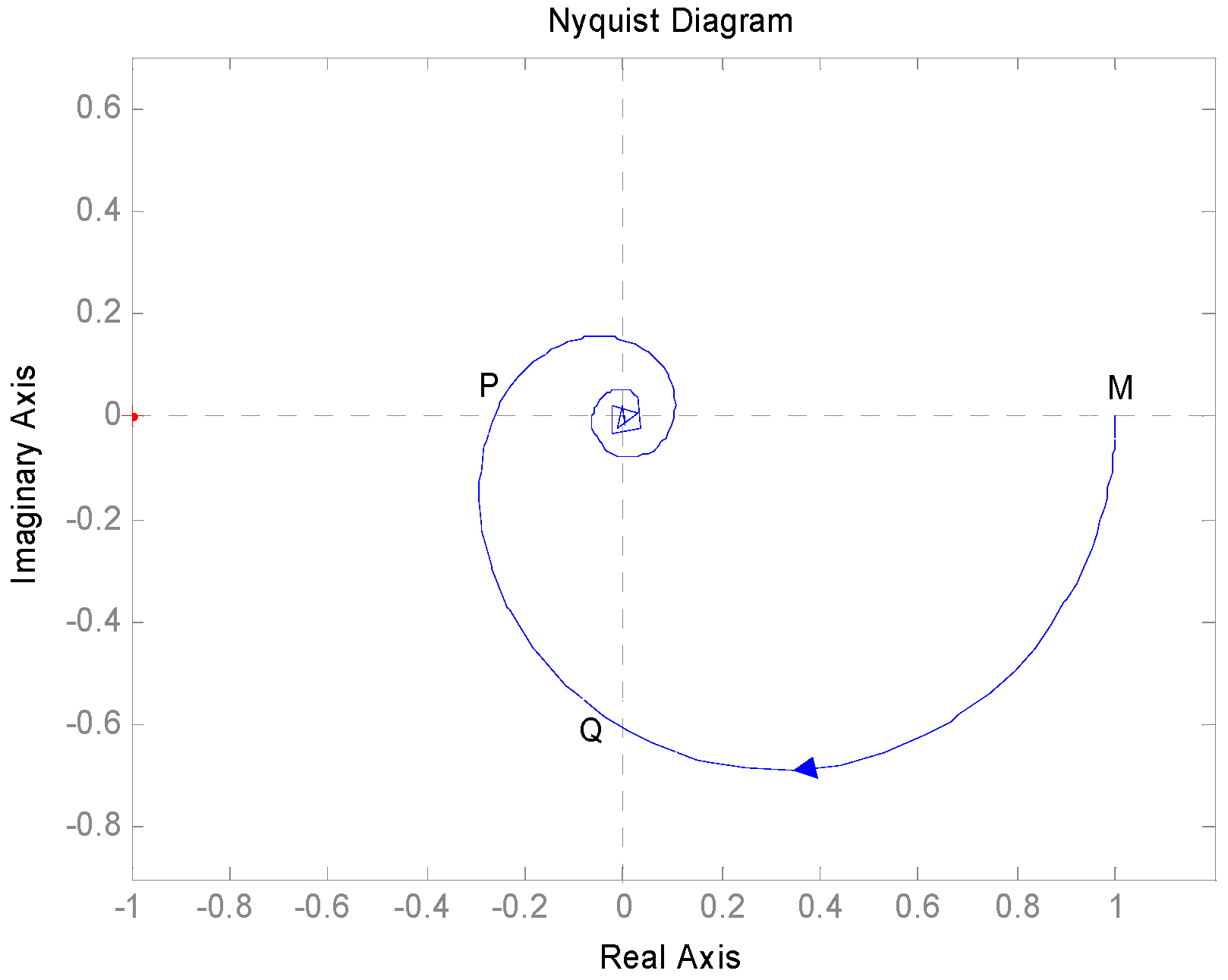
The characteristics of the limit cycle object have not been studied in depth. To determine whether an object has a limit oscillation, the transfer function of the object is needed to be known. The oscillation condition is that the Nyquist curve of the plant intersects the negative inverse description function curve of the hysteresis relay in the third quadrant on the complex plane, and the limit cycle at the intersection is stable. However, during the actual engineering application process, the characteristics of the controlled plants are not fixed, the specific parameters are unknown, and the accurate Nyquist curve cannot be obtained.
The PM method cannot obtain a stable PID control system when the plant delay is large. The amplitude margin of a system is related to the open-loop amplitude-frequency characteristic at the phase-crossing frequency. For a system with a large delay plant, the open-loop amplitude-frequency characteristic is the Nyquist curve of the large delay plant without a controller, with this curve having poor attenuation. The method by only moving the critical point on the curve cannot change the amplitude-frequency characteristic of the frequency band near the phase angle crossing frequency. Reflected on the complex plane, the PM method cannot guarantee the system amplitude margin with the PID controller to meet the stability requirements. For the large delay plant, the PID control system obtained by the simple PM method will have a step response with oscillation and even divergence, and the control effect is not good.
4. Simulation Example
The main steam temperature is one of the most important controlled parameters in large boiler units of thermal power plants. Only when the main steam temperature is controlled within a reasonable and stable range can the efficient operation of the units be ensured. The commonly used main steam temperature control strategy is the cascade PID control. When adjusting the controller parameters of the outer loop, the inner loop system and outer loop controlled plant need to be fitted to a generalized plant first. According to [
17], the generalized controlled plant function of the main steam temperature to the disturbance of the feed water of a 600 MW supercritical once-through boiler at 100% load is shown in Equation (25). An improved PM auto-tuning algorithm is applied to the model to obtain PID controller parameters.
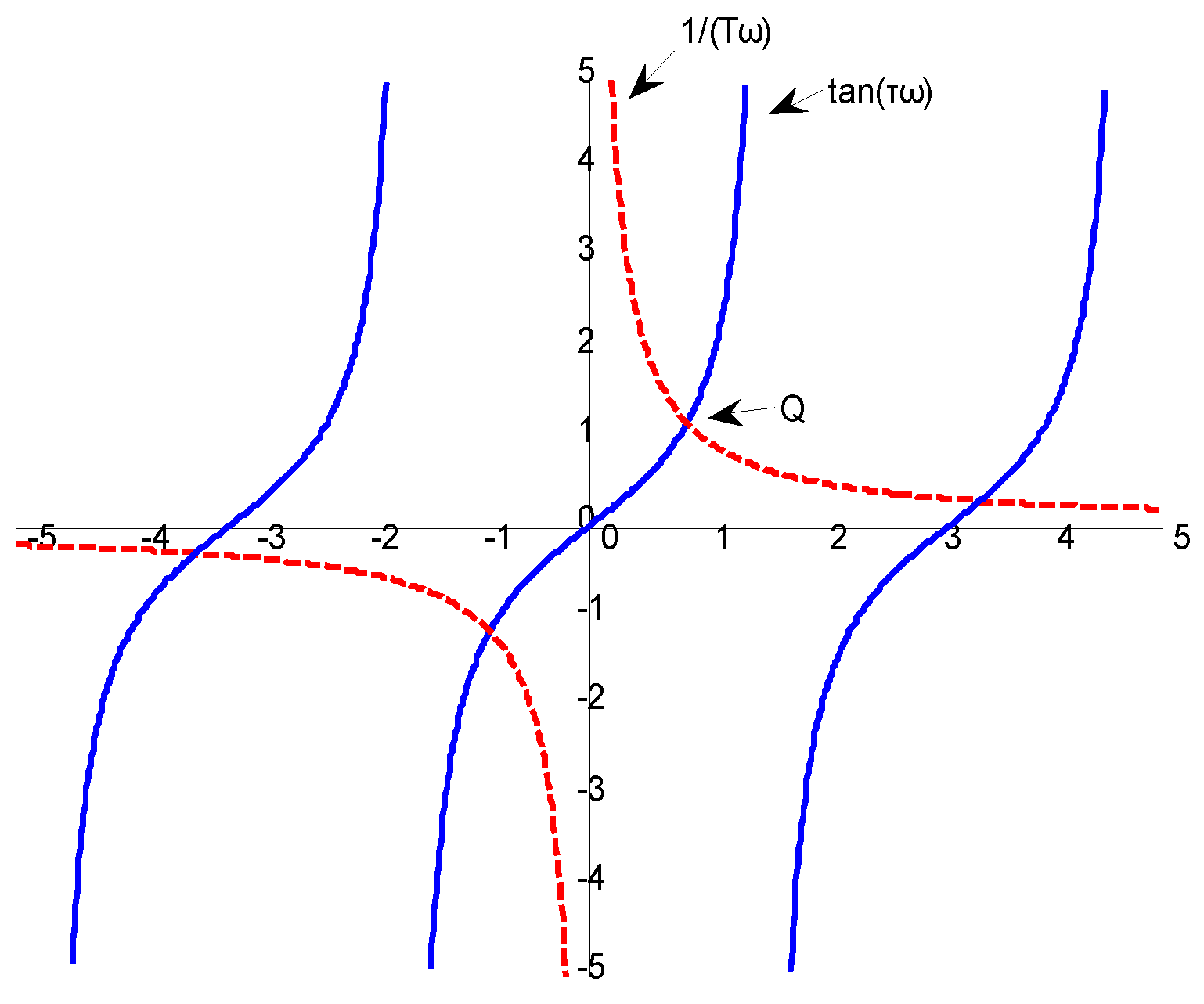
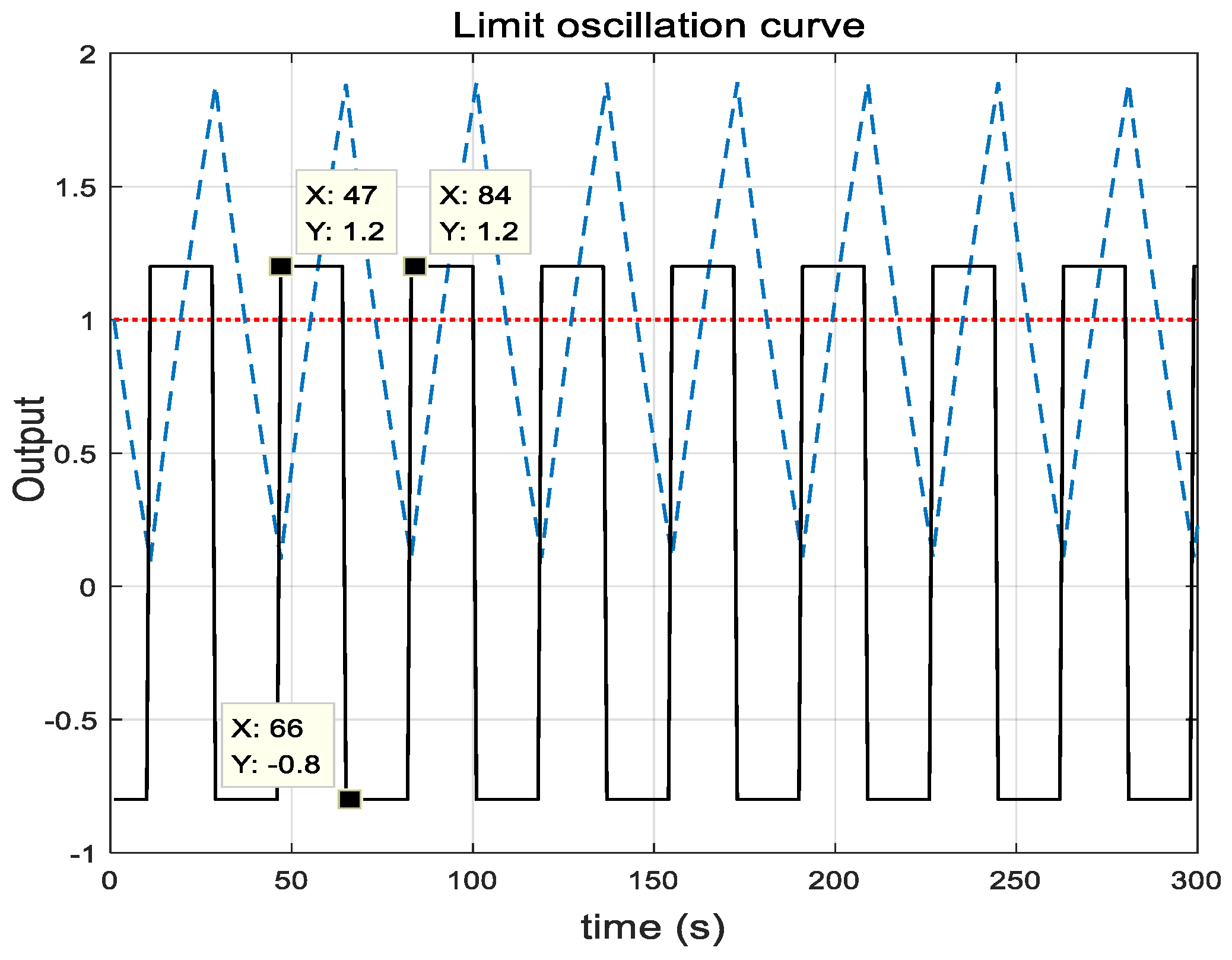
Here, the characteristics of the controlled plant have been determined, so the identification process is omitted. The ratio of the delay time of the plant to the inertia time constant is 0.6429. In the case of
τ/T = 0.6 in
Table 1, the sine of the target phase angle margin satisfies
, so
is available. According to Equation (7), the relay parameter should be designed as
ε/d = 0.5357, where the relay threshold value is taken as
d = 1. Connect the plant and the relay into a closed loop, and the oscillation curve can be obtained, as shown in
Figure 11.
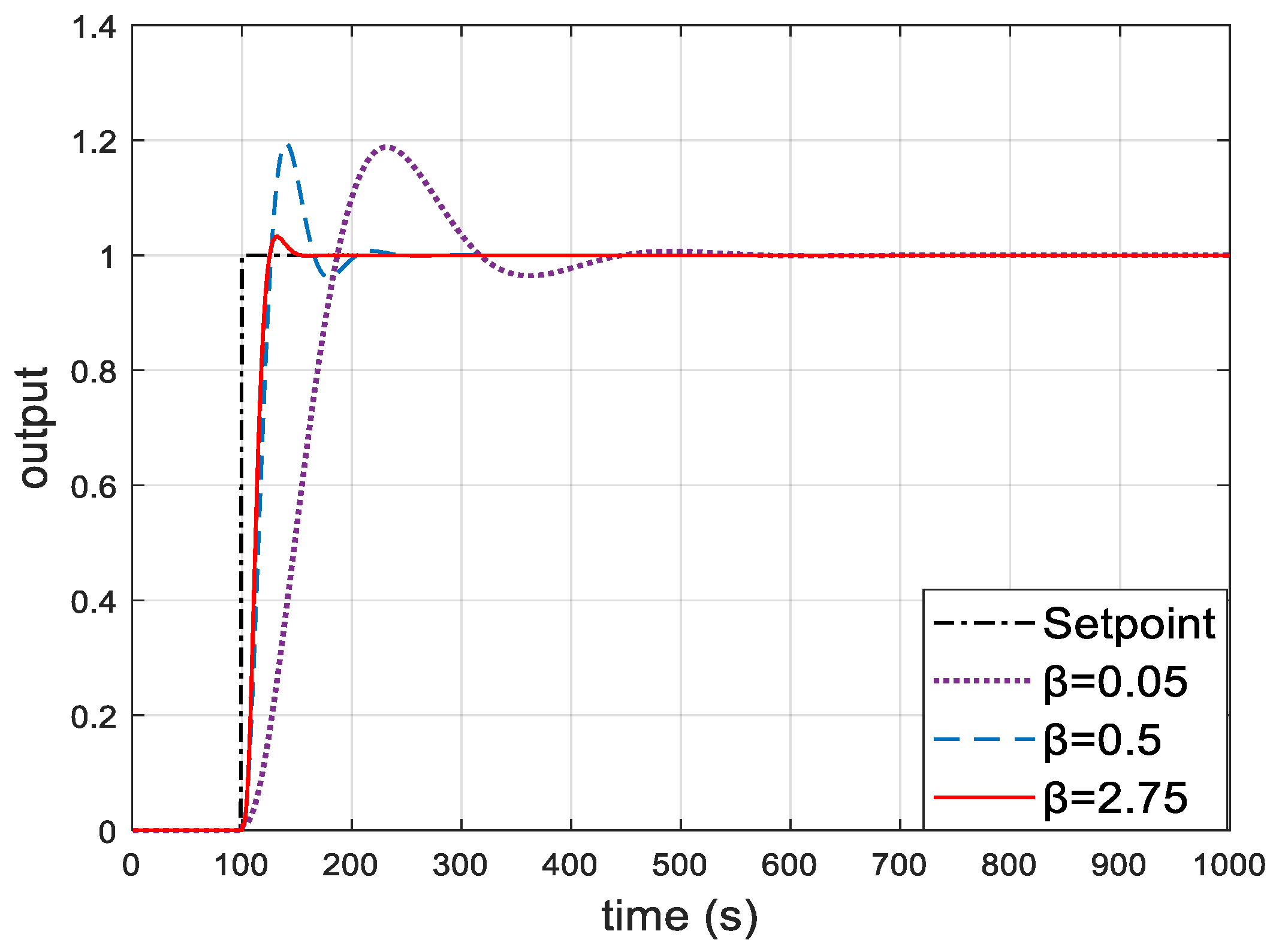
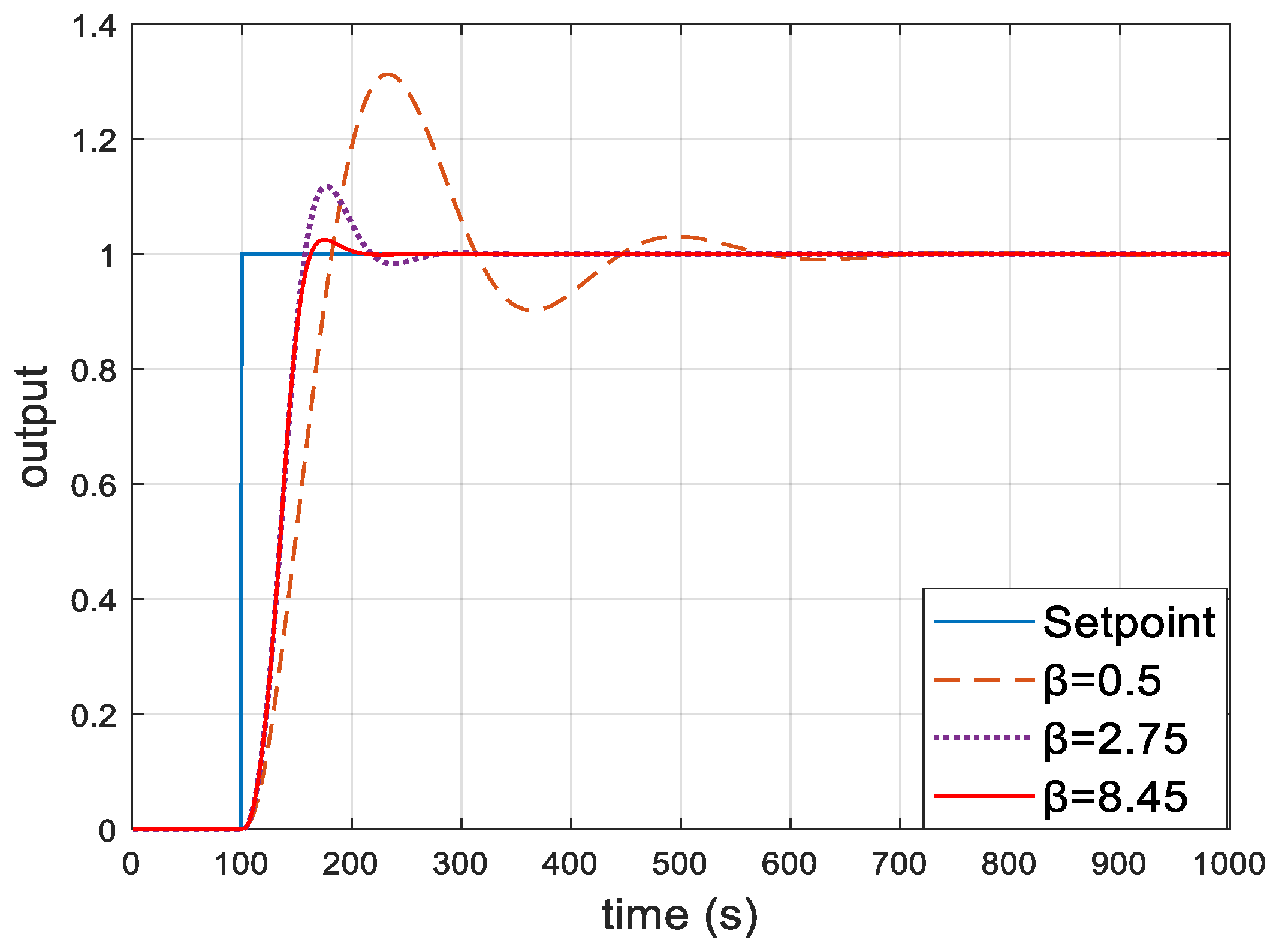
The controller parameters with the smallest ITAE index are calculated by an optimization algorithm for the correction coefficient within the range of (0,10), and algorithm results are shown in
Table 4. The controller is:
The controller obtained through auto-tuning by the traditional PM method comes as:
In addition, the controller of the same plant is tuned by the Z-N method, and the obtained controller comes as:
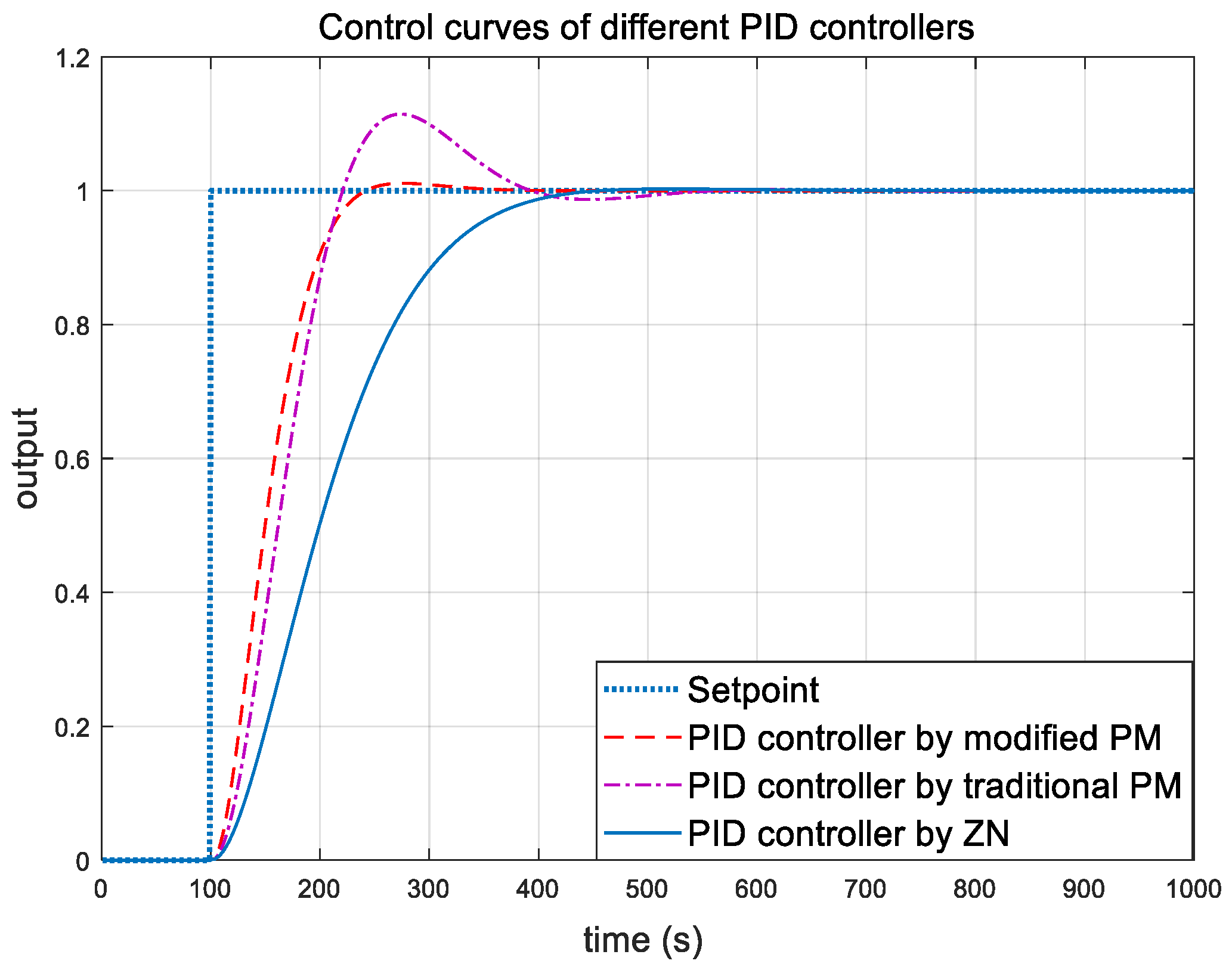
When the input of the set value of the plant is disturbed, the control effect of the controlled plant under the three PID controllers is shown in
Figure 12, and the ITAE indexes of the three control performances is shown in
Table 5. The ITAE index of the improved PM method is much smaller than that of the Z-N method and the traditional PM method, and the control curve does not fluctuate frequently. The overshoot is only about 1%, and the adjustment time is about 100 s, which are both less than those of the other two control curves. In summary, the PID tuning improvement algorithm based on the phase angle margin obtains the best controller effect.
In order to more directly verify the results of the improved PM tuning algorithm applied in thermal power plants, this paper carried out a test on a 1000 MW ultra-supercritical unit. Under the steady-state condition of the 1000 MW unit, the PID controller of the secondary spray desuperheating system of the unit’s main steam temperature control is tuned. From the operating experience of the power plant, it can be seen that the secondary water spray desuperheating system is a large inertial element with delay, and the system characteristics will change according to the operating conditions. Therefore, it is difficult to manually adjust PID parameters.
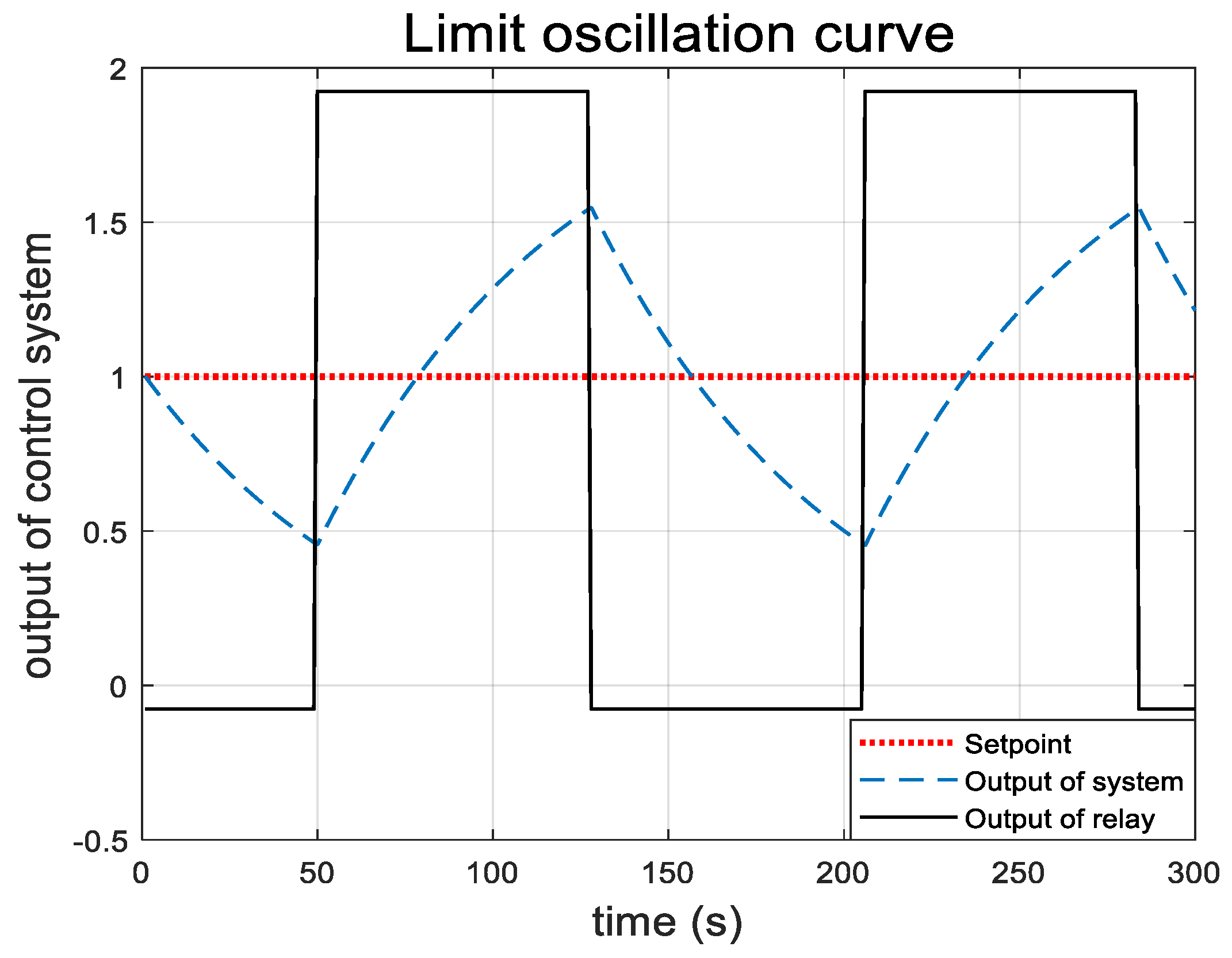
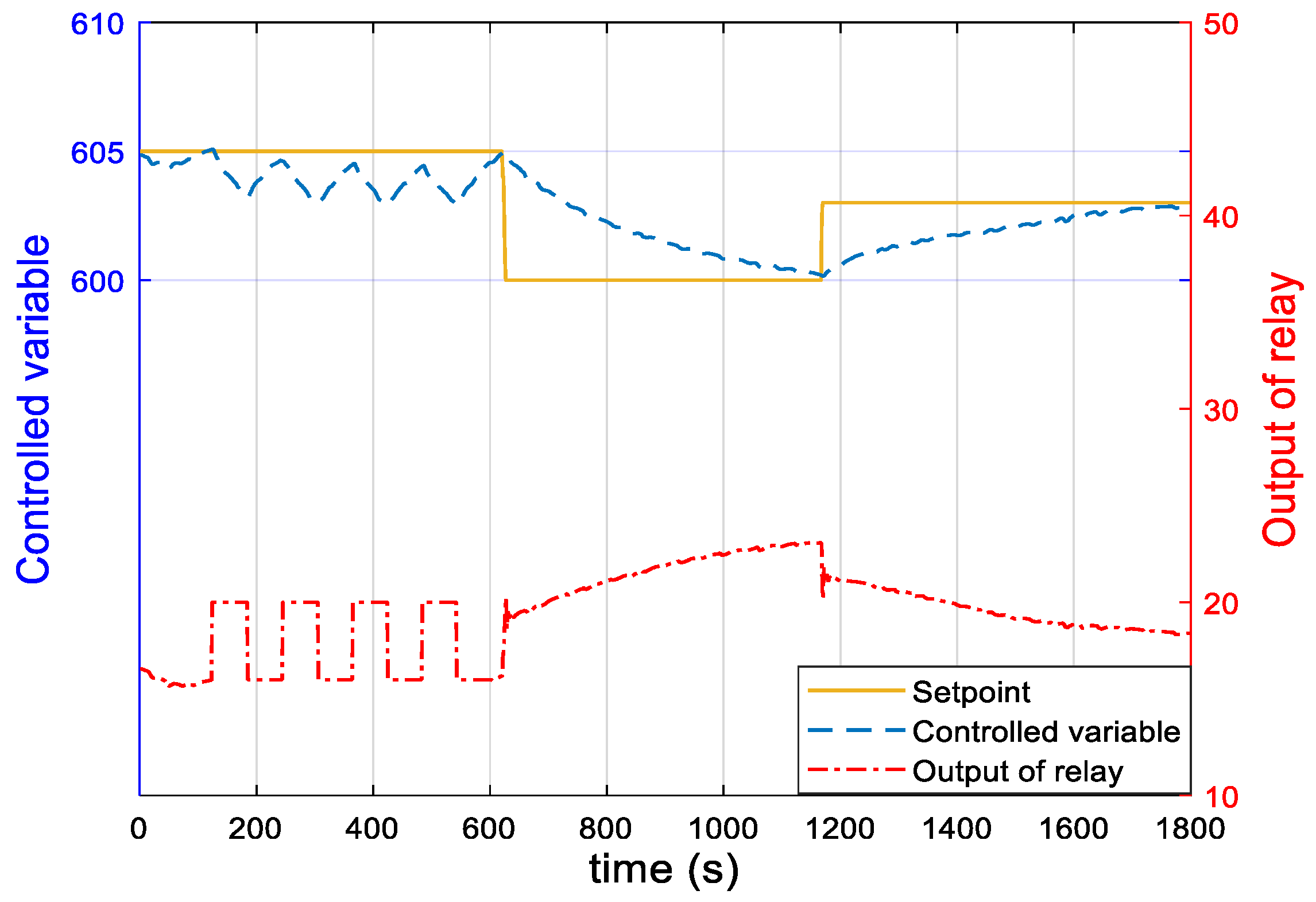
The experimental results with the main parameters during the tuning process are shown in
Figure 13. The controlled system begins to enter the tuning mode at 100 s, and the controlled object forms a closed loop with the relay. The output curve of the relay is a square wave, and the system exhibits limit oscillation under the excitation of the square wave. The oscillation of the main steam temperature is shown by the blue dotted line, and the fluctuation of the main steam temperature is less than 2 °C. When it reaches 610 s, the tuning algorithm gives the PID control parameters, the controlled object switches from the relay loop to the PID control loop and the tuning mode ends. At 620 s, the system set point is reduced from 605 °C to 600 °C, and the main steam temperature gradually stabilizes to 600 °C under the PID control. Then, the set value is increased from 600 °C to 603 °C at 1170 s, and the main steam temperature is gradually increased to 603 °C. The experimental results show that the improved PM tuning algorithm can be applied to the control of thermal objects in thermal power plants. The tuning controller is calculated in Equation (30).
5. Conclusions
In this paper, the application of the PID controller auto-tuning parameter algorithm based on the phase angle margin is studied in the objected with first-order inertia and pure delay of a thermal power plant. The study found that the traditional PM method cannot always meet the control requirements for PID controller auto-tuning for different plants. In this paper, an improved tuning algorithm based on phase margin is proposed. By obtaining the maximum value of the target phase angle margin of critical oscillation by the frequency characteristics of the plant, it can ensure the critical oscillation of the controlled plant under the control of the relay, reduce the online auto-tuning time and ensure the safe operation of the controlled plant when oscillating. Furthermore, the amplitude and angular frequency of the limit oscillation waveform are obtained by combining the oscillation waveform. Based on this, the PID controller parameters are optimized online by combining the plant model identification. Also, the ITAE index as the optimization target is verified by simulation in the superheated steam temperature control system of the actual power station. The simulation results show that, compared with the traditional PM method and Ziegler–Nichols method, the improved PM online auto-tuning algorithm proposed in this paper can effectively improve the control quality of the plant, and the system adjustment is faster and the overshoot is smaller.
In addition, this paper tunes the parameters of the PID controller of the secondary sprinkler cooling system for the main steam temperature control of a 1000 MW ultra-supercritical unit under full load and steady state conditions. The experimental results show that the oscillation amplitude of the controlled variable is safe and reliable during the setting process, and the control effect is satisfactory. This improved tuning algorithm based on the phase margin provides a safe and feasible scheme for the application of a fast online self-tuning algorithm in power plants.















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}