A Novel Maximum Power Point Tracking Control Strategy for the Building Integrated Photovoltaic System


Abstract
:1. Introduction
1.1. Background and Motivation
1.2. Problems and Solution
2. Methodology
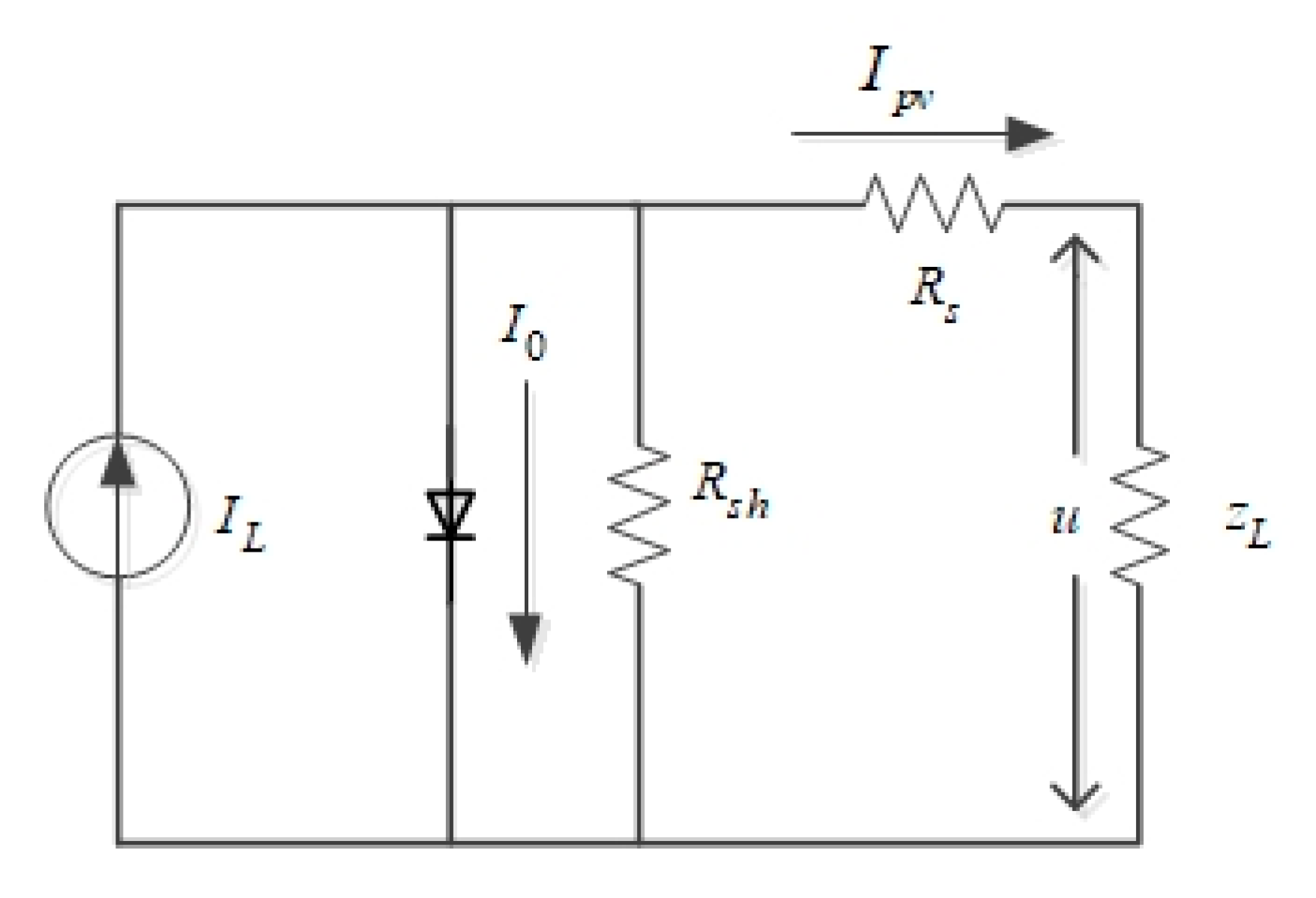
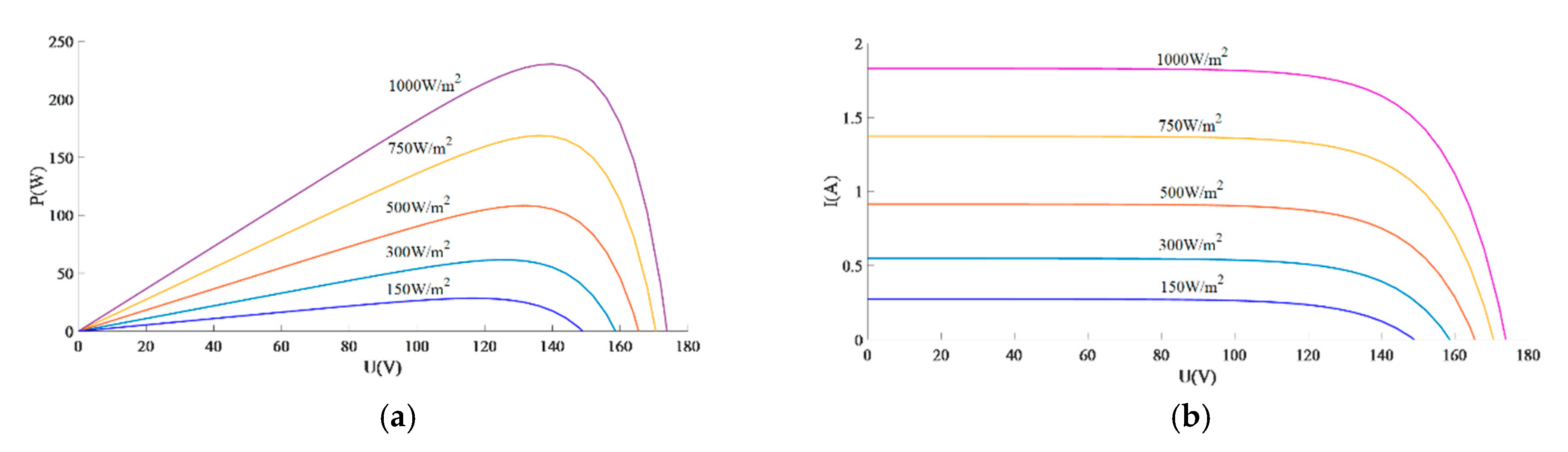
2.1. Characteristics of the Thin-Film Photovoltaic Modules
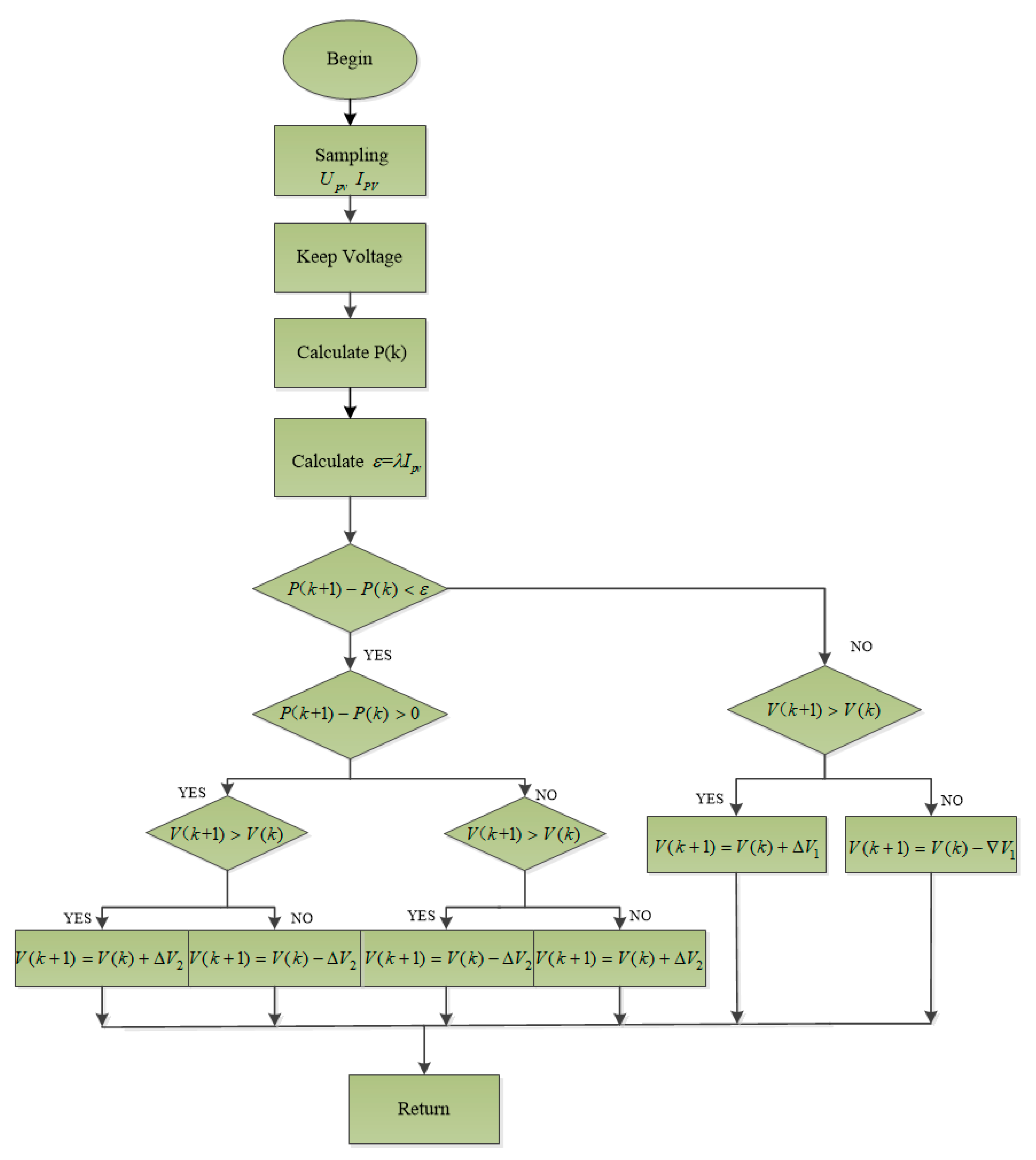
2.2. Proposed MPPT Algorithm
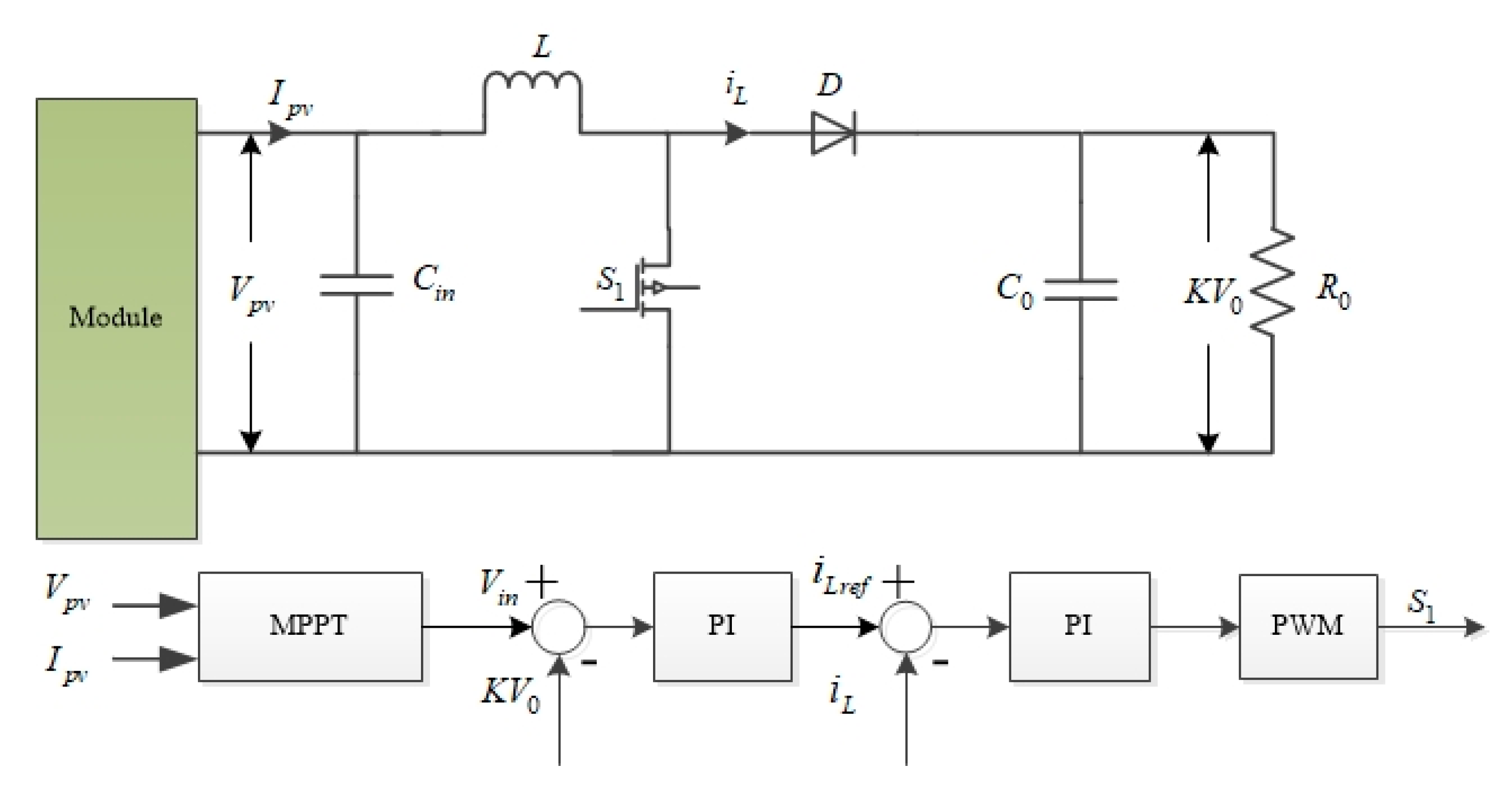
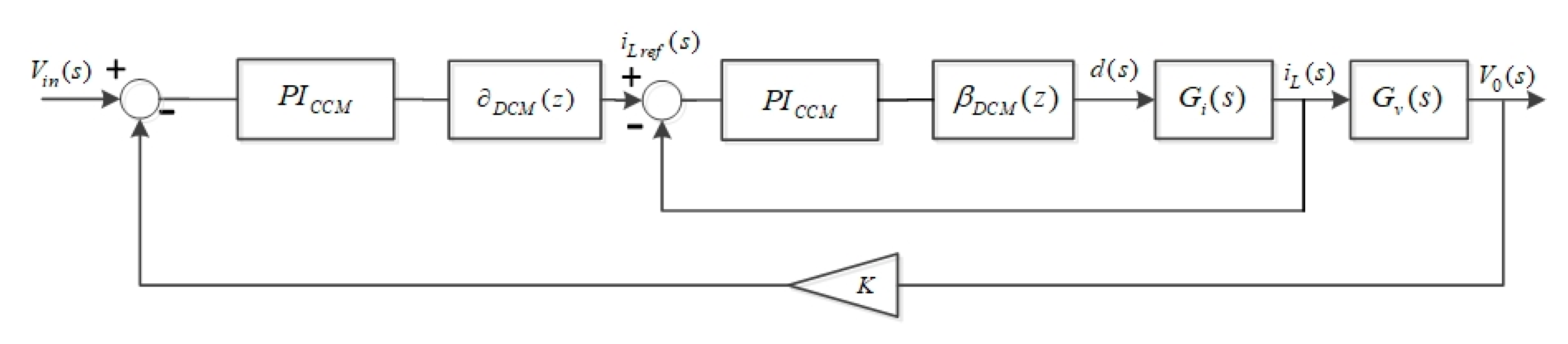
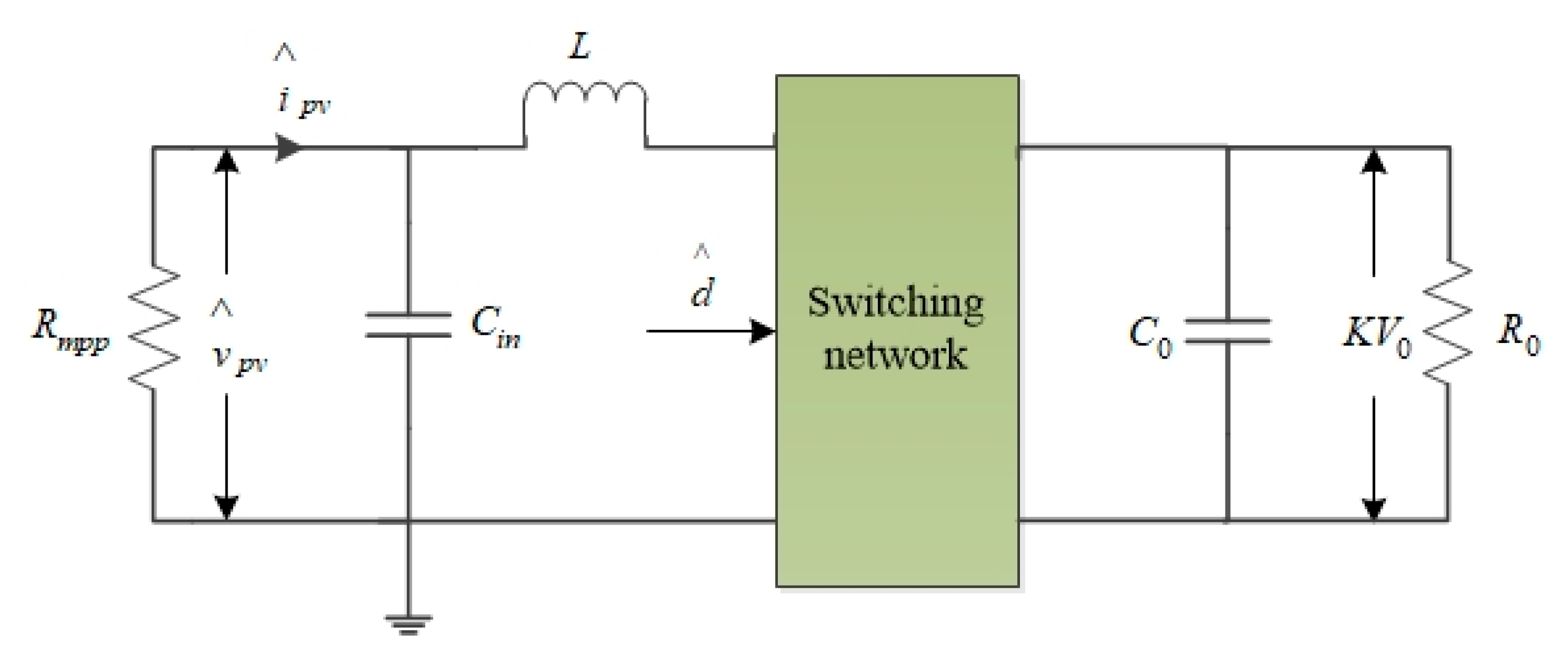
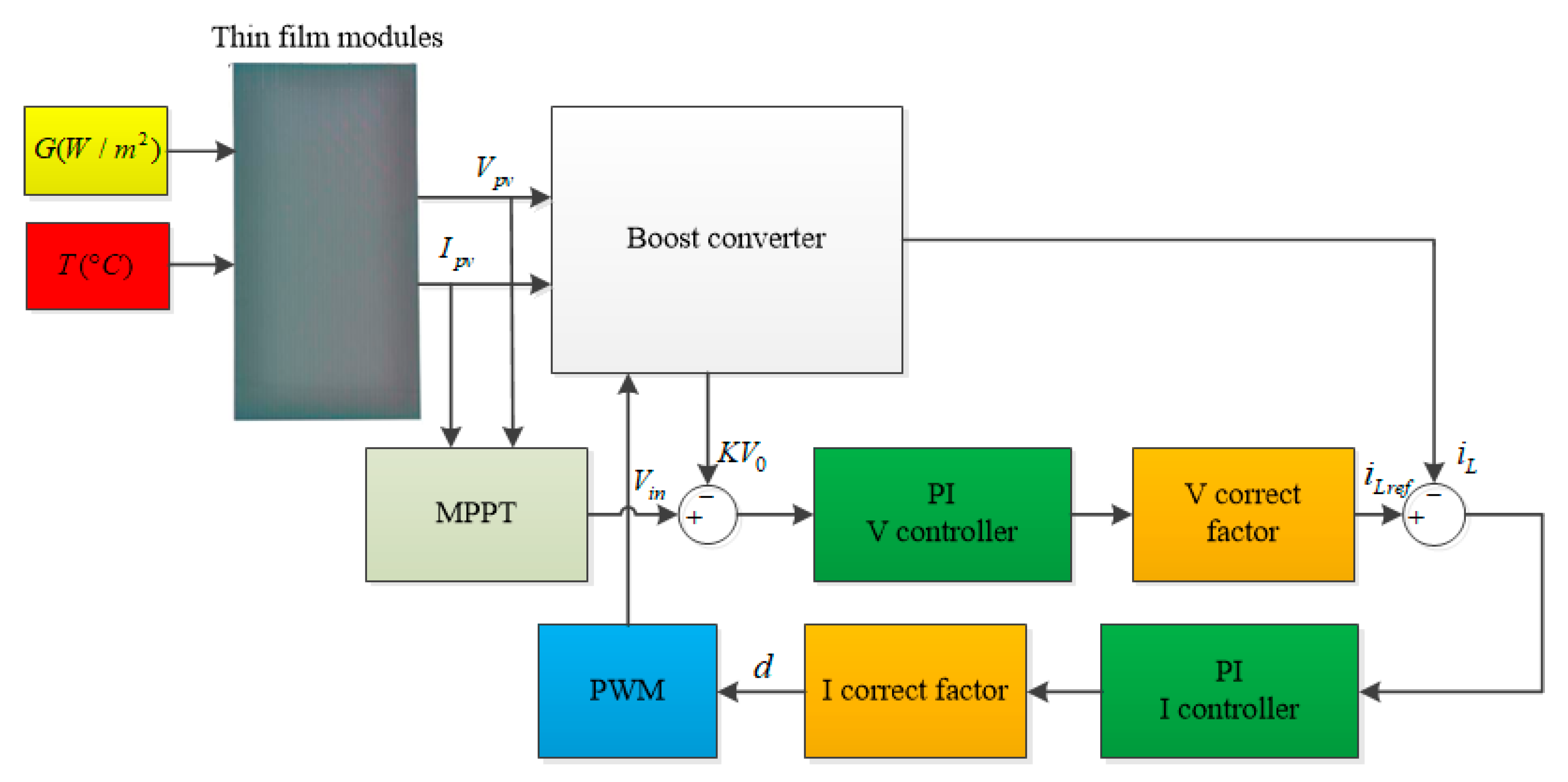
2.3. Proposed Control Strategy
2.4. Design of the Sampling Period
3. Simulation Analysis
3.1. Simulation Parameters and Models
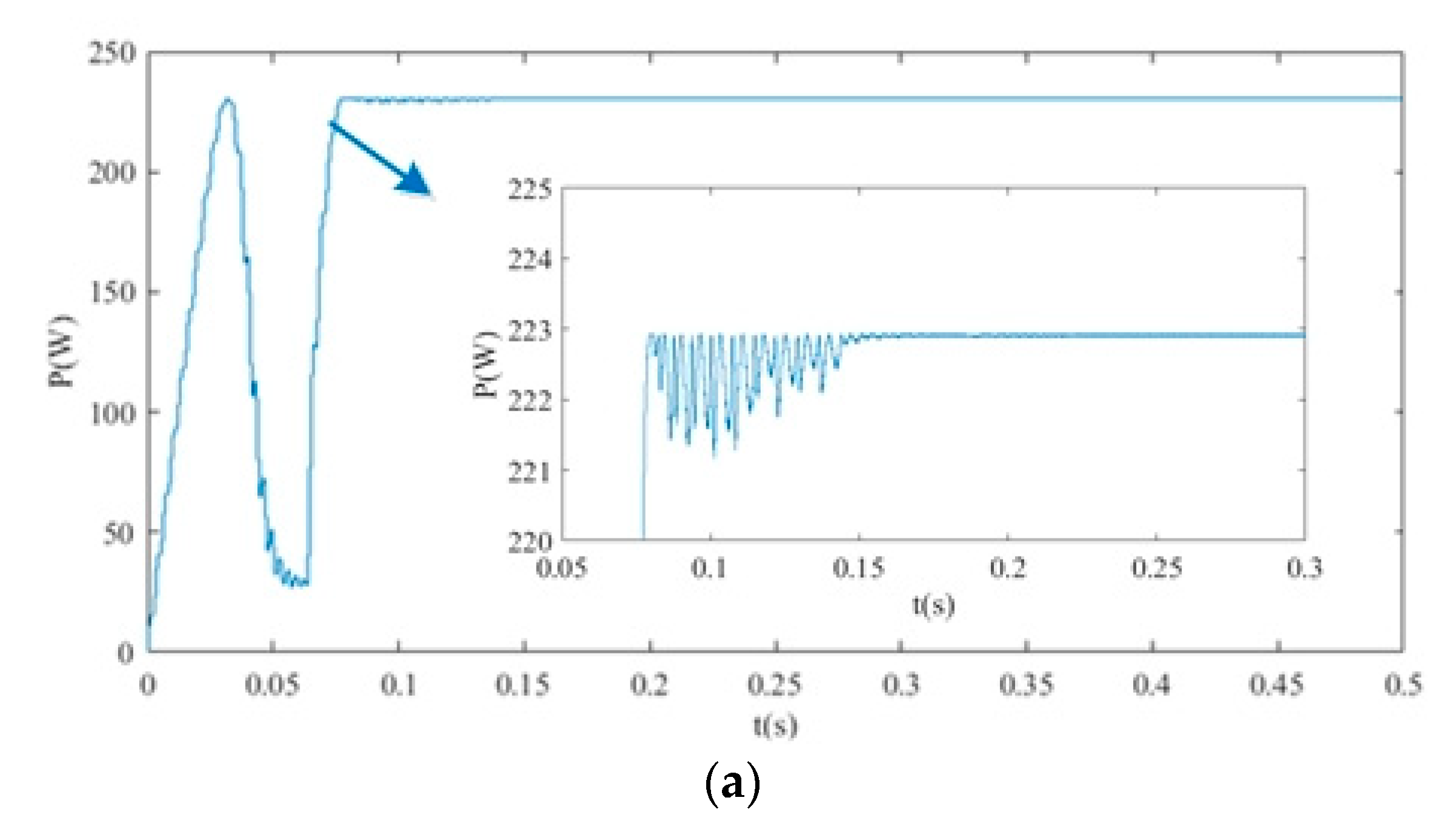
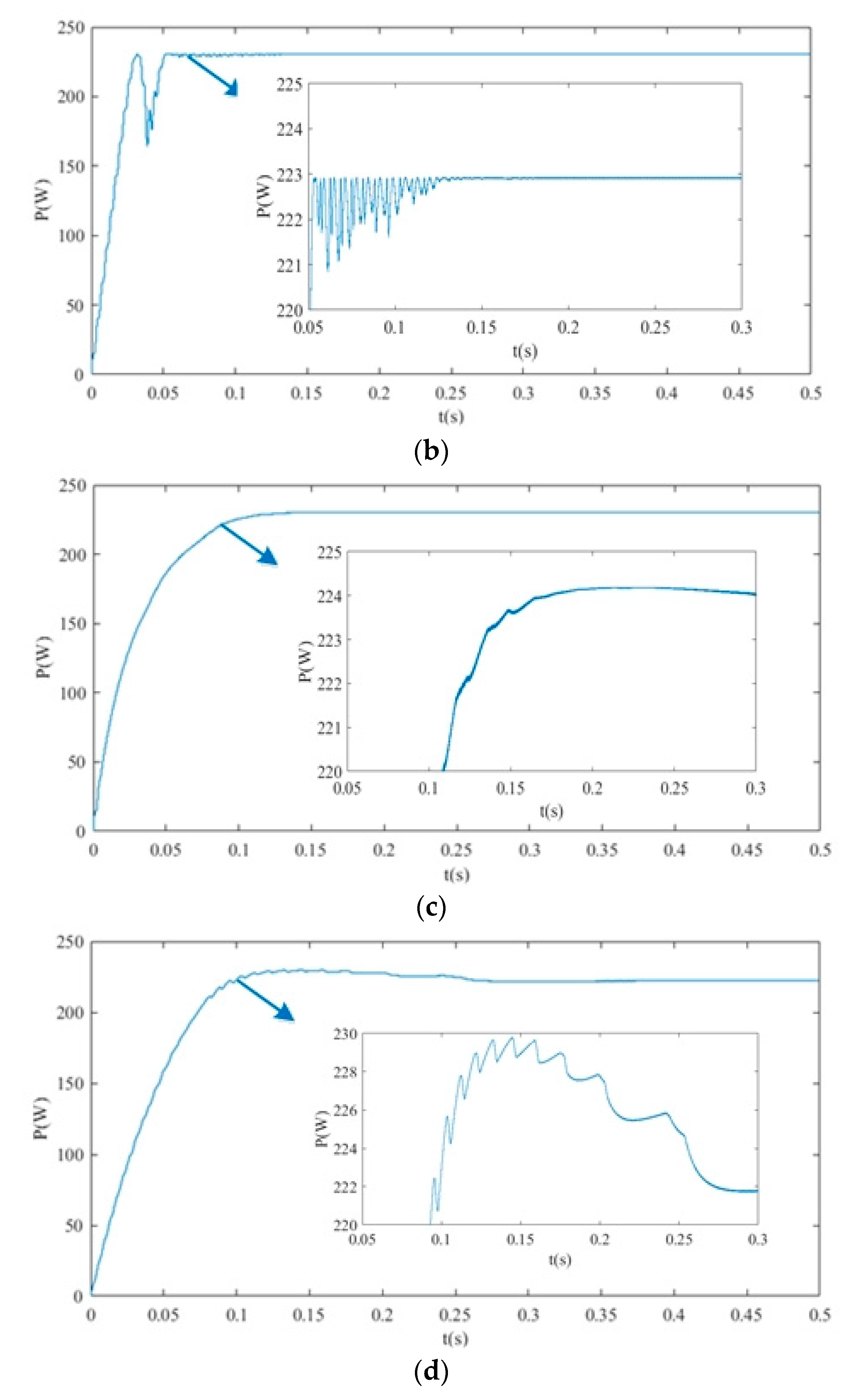
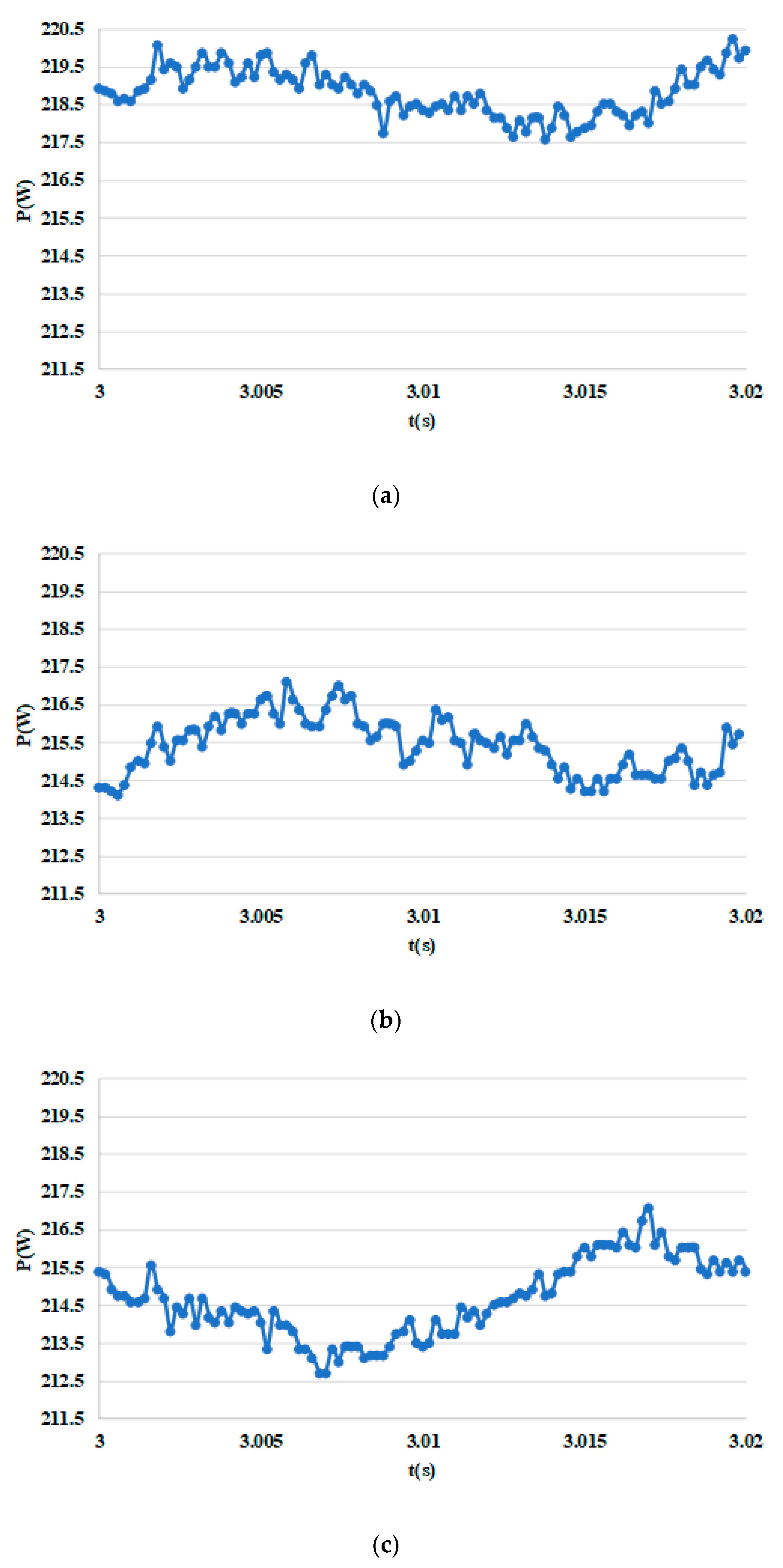
3.2. Simulation Results under Fixed Irradiance
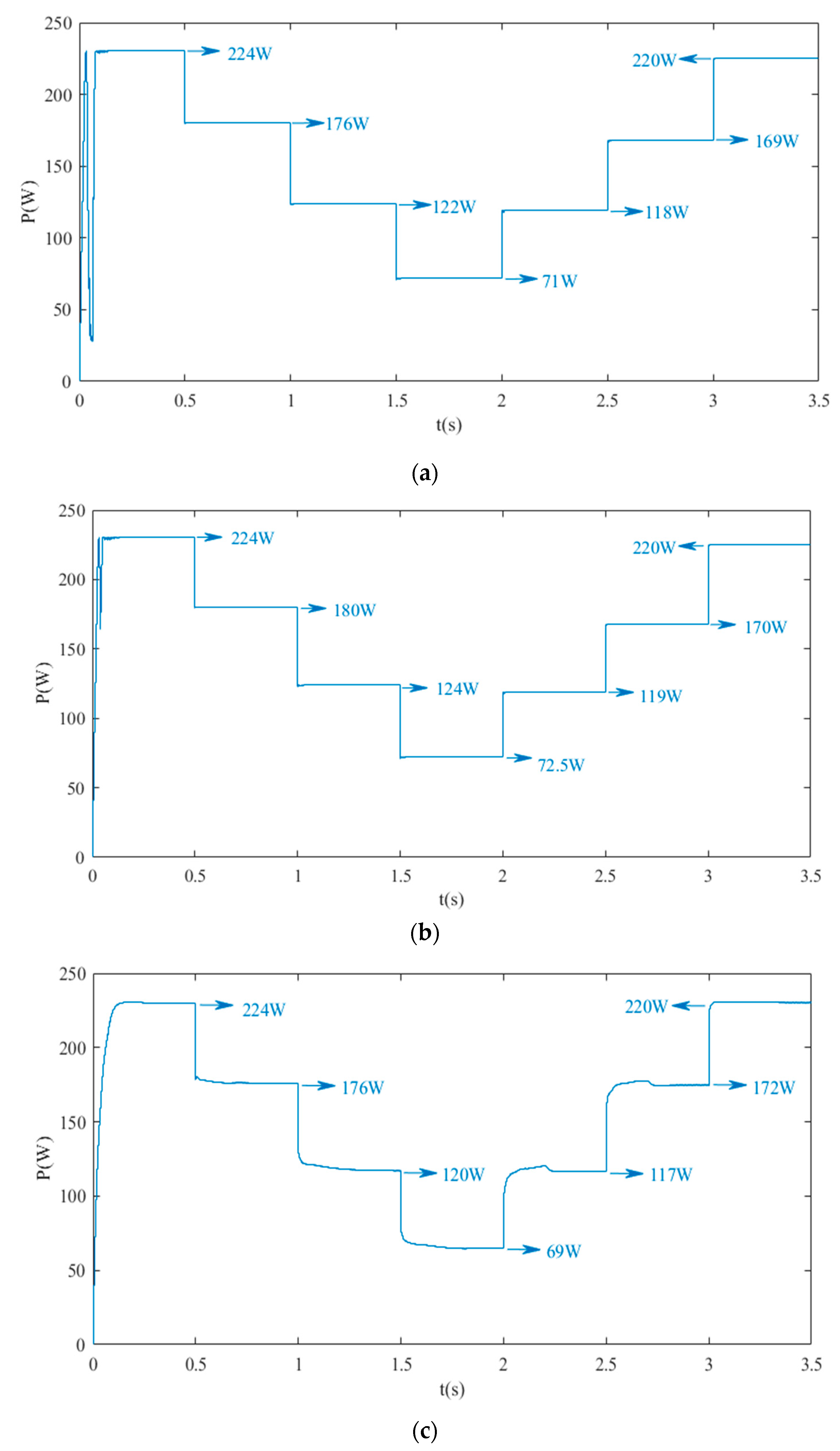
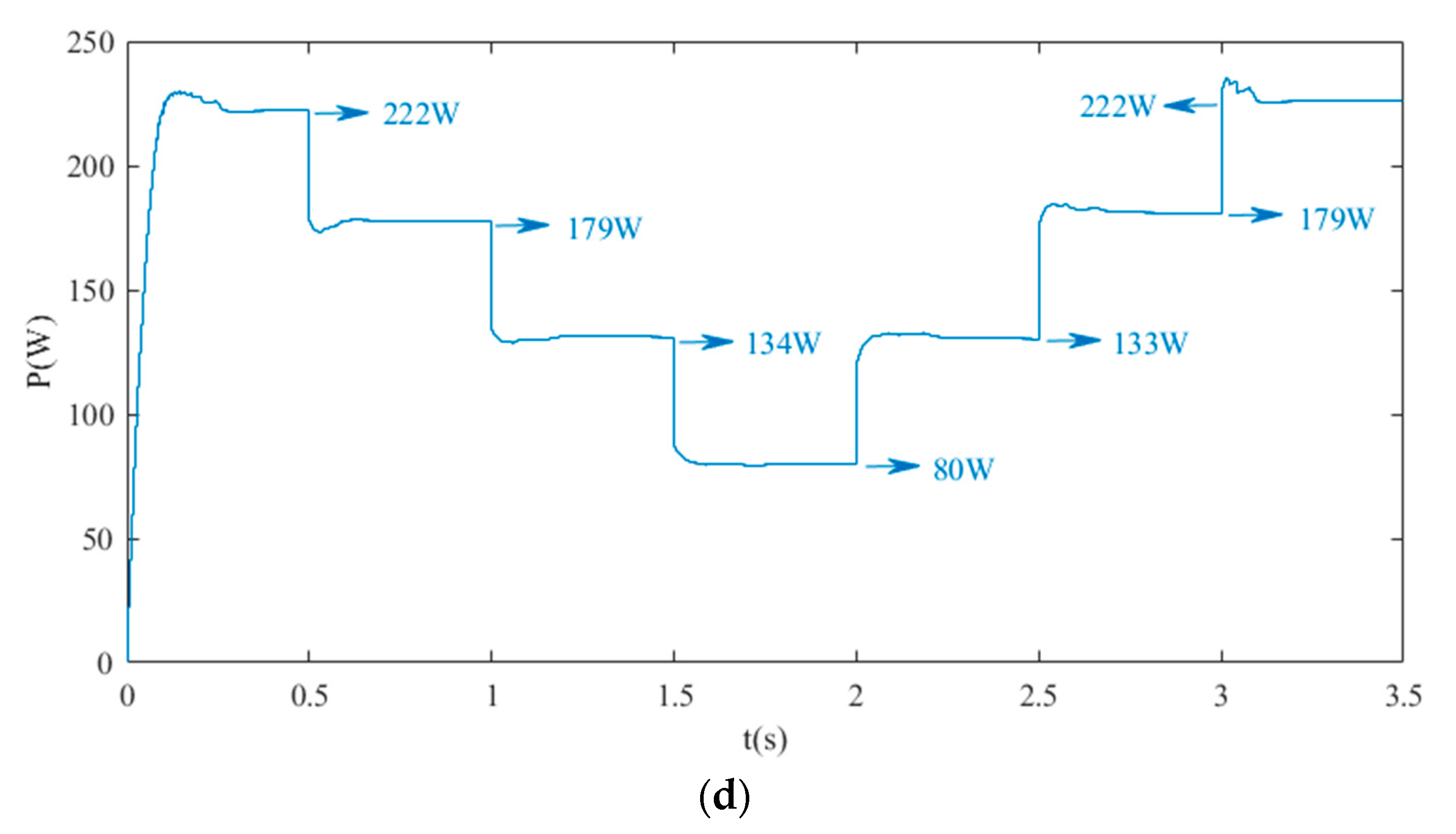
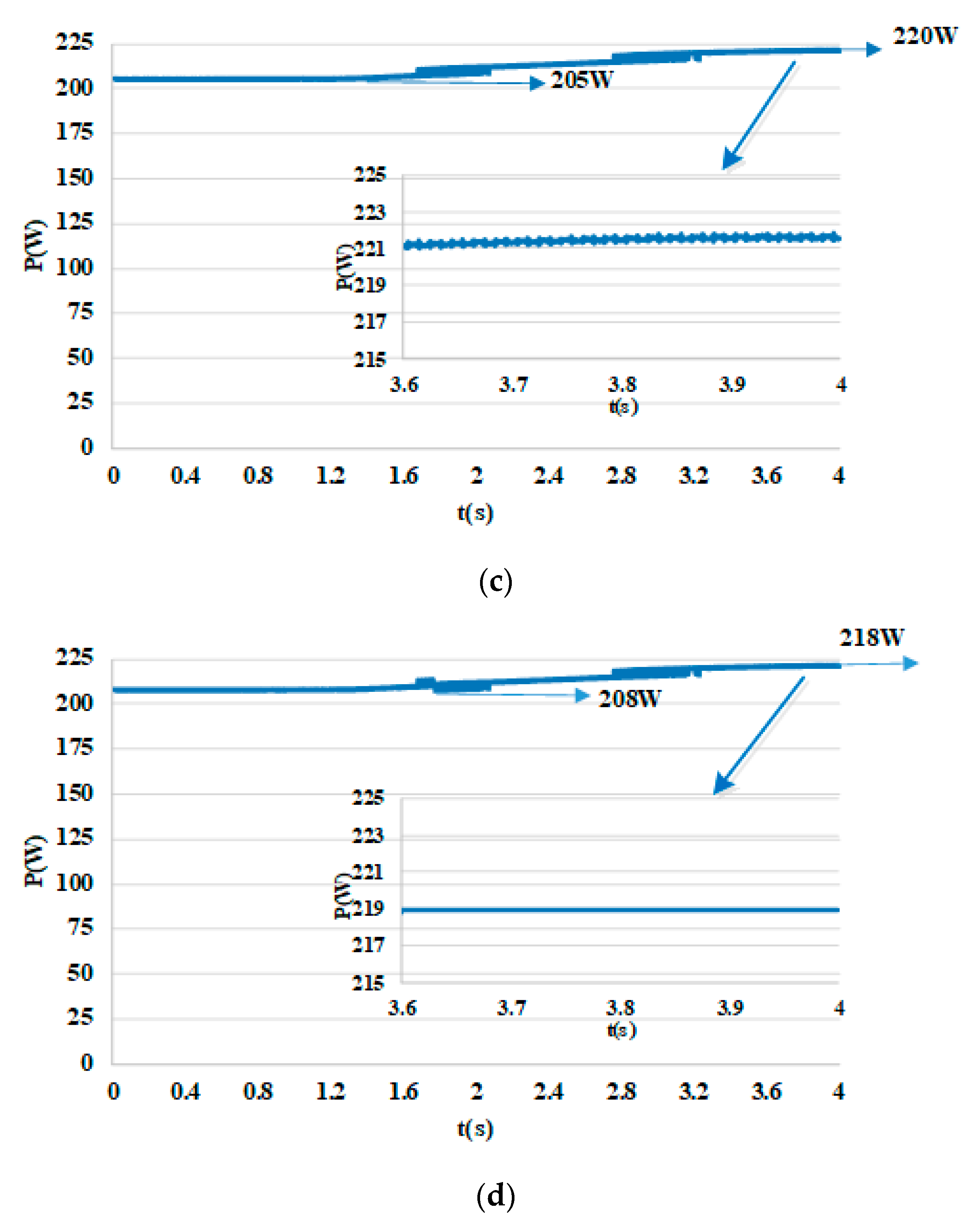
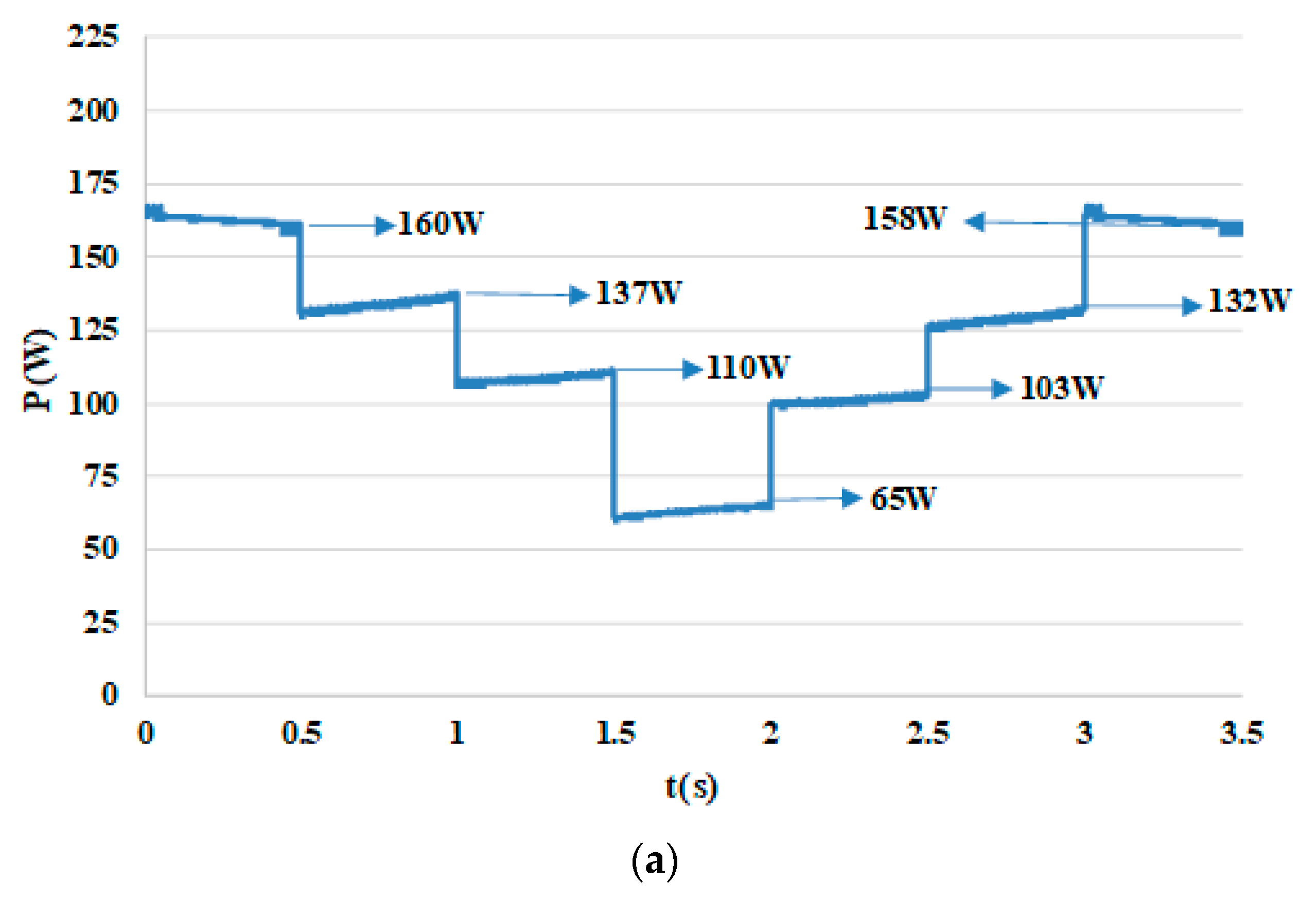
3.3. Simulation Results under Drastic Changes in Irradiance
4. Experimental Validation
4.1. Description of the Experimental Setup
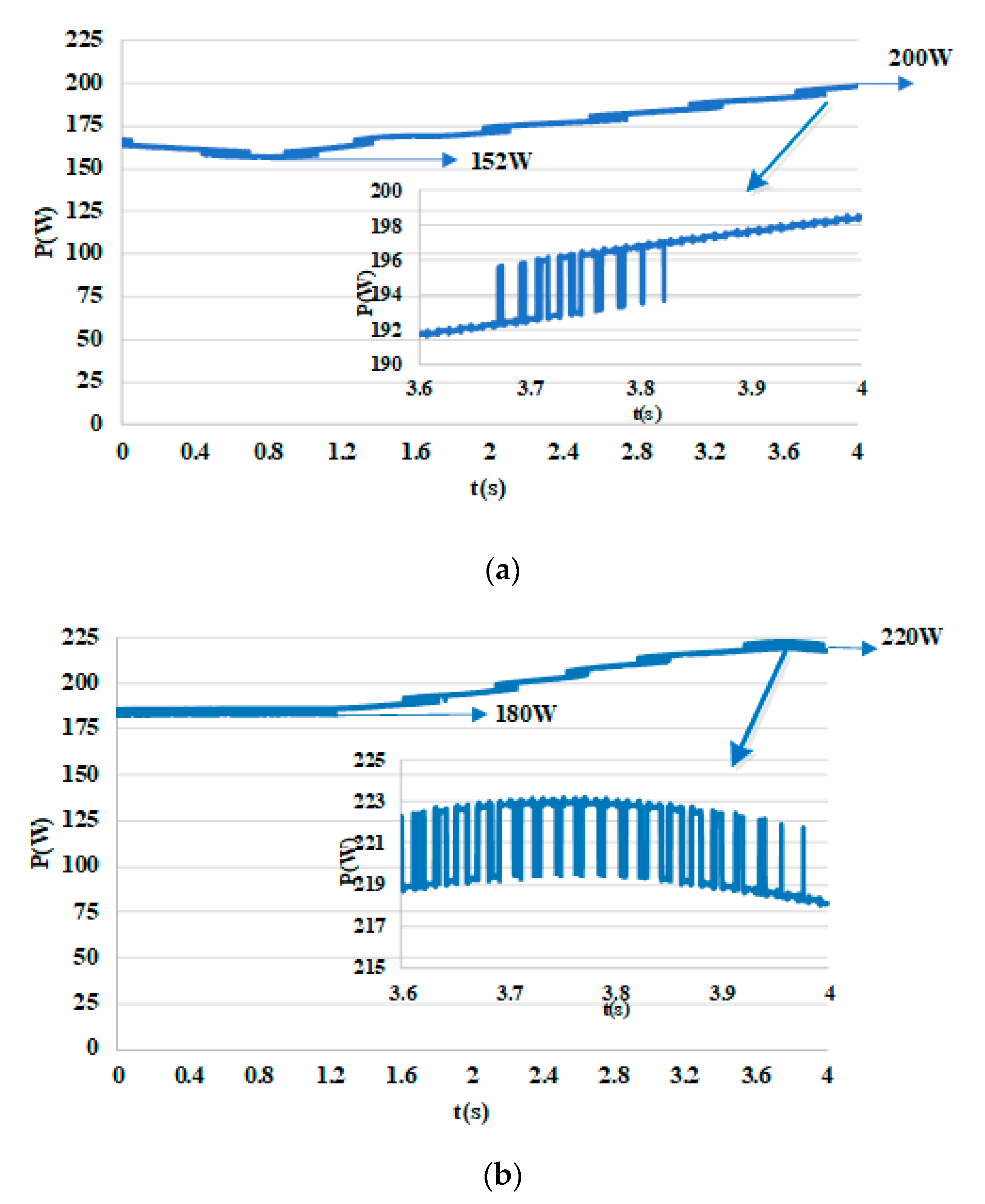
4.2. Experiment Results
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| BIPVs | building-integrated photovoltaics |
| MPPT | maximum power point tracking |
| CCM | continuous conduction mode |
| DCM | discontinuous current mode |
| PID | proportion integral differential |
| PWM | pulse width modulation |
| 3SVSS | three-stage variable step size |
| DCL | double closed-loop |
| 2SVSS | two-stage variable step size |
| P&O | perturbation and observation |
Nomenclature
| npIL | The photocurrent [A] |
| npI0 | The reverse saturation current [A] |
| q | The electron charge |
| K | The Boltzmann constant |
| T | The absolute temperature [K] |
| A | The diode factor |
| Rs | The series resistance [Ω] |
| Rsh | The parallel resistance [Ω] |
| Vpv | The operating voltage of the PV module [V] |
| Impp | The current at MPP [A] |
| Isc | The short-current of the PV module [A] |
| Voc | The open circuit voltage of the PV module [V] |
| Tpv | The operating temperature of the PV module [°C] |
| S | The solar irradiance nominal [W/m2] |
| a | The current temperature coefficient |
| b | The voltage temperature coefficient |
| d | The duty cycle |
| Vin | The input voltage of the Boost converter [V] |
| V0 | The output voltage of the Boost converter [V] |
| d1, d2 | The two different duty cycles in the DCM |
| imax | The maximum current of the Boost in the DCM [A] |
| Ts | The switching period [s] |
| IL | The inductor current [A] |
| I0 | The output current of the Boost converter |
References
- Goetzler, G.; Droesch, W. Research and Development Needs for Building-Integrated Solar Technologies; EERE: Washington, DC, USA, 2014.
- Jia, T.; Dai, Y.; Wang, R. Refining energy sources in winemaking industry by using solar energy as alternatives for fossil fuels: A review and perspective. Renew. Sust. Energy. Rev. 2018, 88, 278–296. [Google Scholar] [CrossRef]
- Tian, Z.; Zhang, X.; Jin, X.; Zhou, X.; Si, B.; Shi, X. Towards adoption of building energy simulation and optimization for passive building design: A survey and a review. Energy Build. 2018, 158, 1306–1316. [Google Scholar] [CrossRef]
- Shukla, A.; Sudhakar, K.; Baredar, P. Recent advancement in BIPV product technologies: A review. Energy Build. 2017, 140, 188–195. [Google Scholar] [CrossRef]
- Femia, N.; Lisi, G.; Petrone, G.; Spagnuolo, G.; Vitelli, M. Distributed maximum power point tracking of photovoltaic arrays: Novel approach and system analysis. IEEE Trans. Ind. Electron. 2008, 55, 2610–2621. [Google Scholar] [CrossRef] [Green Version]
- Jayathissa, P.; Luzzatto, M.; Schmidli, J.; Hofer, J.; Nagy, Z.; Schlueter, A. Optimizing building net energy demand with dynamic BIPV shading. Appl. Energy 2017, 202, 726–735. [Google Scholar] [CrossRef]
- Cronemberger, J.; Corpas, M.; Cerón, I.; Caamaño-Martín, E.; Sánchez, S. BIPV technology application: Highlighting advances, tendencies and solutions through Solar Decathlon Europe houses. Energy Build. 2014, 83, 44–56. [Google Scholar] [CrossRef]
- Sánchez-Palencia, P.; Martín-Chivelet, N.; Chenlo, F. Modeling temperature and thermal transmittance of building integrated photovoltaic modules. Sol. Energy 2019, 184, 153–161. [Google Scholar] [CrossRef]
- Kumar, N.; Sudhakar, K.; Samykano, M. Performance evaluation of CdTe BIPV roof and façades in tropical weather conditions. Energy Sources Part A 2020, 42, 1057–1071. [Google Scholar] [CrossRef]
- Zomer, C.; Costa, M.; Nobre, A.; Rüther, R. Performance compromises of building-integrated and building-applied photovoltaics (BIPV and BAPV) in Brazilian airports. Energy Build. 2013, 66, 607–615. [Google Scholar] [CrossRef]
- Spiliotis, K.; Gonçalves, J.; Van De Sande, W. Modeling and validation of a DC/DC power converter for building energy simulations: Application to BIPV systems. Appl. Energy 2019, 240, 646–665. [Google Scholar] [CrossRef]
- Sande, W.; Daenen, M.; Spiliotis, K.; Goncalves, J.; Ravyts, S.; Saelens, D. Reliability comparison of a DC-DC converter placed in building-integrated photovoltaic module frames. In Proceedings of the 2018 7th International Conference on Renewable Energy Research and Applications (ICRERA), Paris, France, 14–17 October 2018. [Google Scholar] [CrossRef]
- Alik, R.; Jusoh, A. Modified Perturb and Observe (P&O) with checking algorithm under various solar irradiation. Sol. Energy 2017, 148, 128–139. [Google Scholar] [CrossRef]
- Bradai, R.; Boukenoui, R.; Kheldoun, A.; Salhi, H.; Ghanes, M. Experimental assessment of new fast MPPT algorithm for PV systems under nonuniform irradiance conditions. Appl. Energy 2017, 199, 416–429. [Google Scholar] [CrossRef]
- Jiang, Y.; Qahouq, J.A.A.; Haskew, T.A. Adaptive step size with adaptive-perturbation-frequency digital MPPT controller for a single-sensor photovoltaic solar system. IEEE Trans. Power Electron. 2012, 28, 3195–3205. [Google Scholar] [CrossRef]
- Dasgupta, N.; Pandey, A.; Mukerjee, A. Voltage-sensing-based photovoltaic MPPT with improved tracking and drift avoidance capabilities. Sol. Energy Mat. Sol. Cell 2008, 92, 1552–1558. [Google Scholar] [CrossRef]
- Alzate, R.; Oliveira, V.; Magossi, R. Double Loop Control Design for Boost Converters Based on Frequency Response Data. In Proceedings of the IFAC, Toulouse, France, 9–14 July 2017. [Google Scholar] [CrossRef]
- Le, H.; Orikawa, K.; Itoh, J. Circuit-parameter-independent nonlinearity compensation for boost converter operated in discontinuous current mode. IEEE Trans. Ind. Electron. 2016, 64, 1157–1166. [Google Scholar] [CrossRef]
- Forouzesh, M.; Siwakoti, Y.; Gorji, S.A.; Blaabjerg, F.; Lehman, B. Step-up DC-DC converters: A comprehensive review of voltage-boosting techniques, topologies, and applications. IEEE Trans. Power Electron. 2017, 32, 9143–9178. [Google Scholar] [CrossRef]
- Chen, Y.; Jhang, Y.; Liang, R. A fuzzy-logic based auto-scaling variable step-size MPPT method for PV systems. Sol. Energy 2016, 126, 53–63. [Google Scholar] [CrossRef]
- Liu, C.; Chen, J.; Liu, Y. An asymmetrical fuzzy-logic-control-based MPPT algorithm for photovoltaic systems. Energies 2014, 7, 2177–2193. [Google Scholar] [CrossRef] [Green Version]
- Yatimi, H.; Aroudam, E. Assessment and control of a photovoltaic energy storage system based on the robust sliding mode MPPT controller. Sol. Energy 2016, 139, 557–568. [Google Scholar] [CrossRef]
- Messalti, S.; Harrag, A.; Loukriz, A. A new variable step size neural networks MPPT controller: Review, simulation and hardware implementation. Renew. Sustain. Energy Rev. 2017, 68, 221–233. [Google Scholar] [CrossRef]
- Rashid, K.; Mohammadi, K.; Powell, K. Dynamic simulation and techno-economic analysis of a concentrated solar power (CSP) plant hybridized with both thermal energy storage and natural gas. J. Clean. Prod. 2020, 248. [Google Scholar] [CrossRef]
- Songwongwanich, A.; Yang, Y.; Blaabjerg, F. Delta Power Control Strategy for Multistring Grid-Connected PV Inverters. IEEE Trans. Ind. Appl. 2016. [Google Scholar] [CrossRef] [Green Version]
- Jain, A.; Kapoor, A. Exact analytical solutions of the parameters of real solar cells using Lambert W-function. Sol. Energy Mater. Sol. Cells 2004, 81, 269–277. [Google Scholar] [CrossRef]






















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Nominal power | 112.5 W |
| Voltage at PMAX | 68.5 V |
| Current at PMAX | 1.64 A |
| Open circuit voltage | 87 V |
| Short circuit current | 1.83 A |
| Parameter | Value |
|---|---|
| Input capacitance, Cin (μF) | 600 |
| Output capacitance, C0 (μF) | 200 |
| Inductance, L (mH) | 2.4 |
| Switching frequency, fs (kHz) | 20 |
| Output resistance, R0 (Ω) | 900 |
| Irradiance (W/m2) | Theoretical Maximum Power of Modules | P&O | 2SVSS | DCL Control | Proposed Method | ||||
|---|---|---|---|---|---|---|---|---|---|
| Down | up | Down | up | Down | up | Down | up | ||
| 1000 | 225 | 224 | 220 | 224 | 220 | 224 | 220 | 222 | 222 |
| 800 | 181 | 176 | 169 | 180 | 170 | 176 | 172 | 179 | 179 |
| 600 | 136 | 122 | 118 | 124 | 119 | 120 | 117 | 134 | 133 |
| 400 | 80 | 71 | 71 | 72.5 | 72.5 | 69 | 69 | 80 | 80 |
| Average power(W) | 155.5 | 148.25 | 144.5 | 150.13 | 145.38 | 147.5 | 144.5 | 153.75 | 153.5 |
| Irradiance (W/m2) | Theoretical Maximum Power of Modules | P&O | 2SVSS | DCL Control | Proposed Method | ||||
|---|---|---|---|---|---|---|---|---|---|
| Down | up | Down | up | Down | up | Down | up | ||
| 1000 | 225 | −1 | −5 | −1 | −5 | −1 | −5 | −3 | −3 |
| 800 | 181 | −5 | −12 | −1 | −11 | −5 | −9 | −2 | −2 |
| 600 | 136 | −14 | −18 | −12 | −17 | −16 | −19 | −2 | −3 |
| 400 | 80 | −9 | −9 | −7.5 | −7.5 | −11 | −11 | 0 | 0 |
| Average deviation(W) | / | −7.25 | −11 | −5.38 | −10.13 | −8.13 | −11 | −1.8 | −2 |
| Irradiance (W/m2) | Theoretical Maximum Power of Modules | P&O | 2SVSS | DCL Control | Proposed Method | ||||
|---|---|---|---|---|---|---|---|---|---|
| Down | up | Down | up | Down | up | Down | up | ||
| 1000 | 225 | 160 | 158 | 195 | 194 | 205 | 204 | 218 | 217 |
| 800 | 181 | 137 | 132 | 175 | 163 | 172 | 170 | 176 | 175 |
| 600 | 136 | 110 | 103 | 111 | 103 | 117 | 112 | 132 | 130 |
| 400 | 80 | 65 | 65 | 69 | 69 | 64 | 64 | 76 | 76 |
| Average power (W) | 155.5 | 118 | 114.5 | 137.5 | 132.25 | 139.5 | 137.5 | 150.5 | 149.5 |
| Irradiance (W/m2) | Theoretical Maximum Power of Modules | P&O | 2SVSS | DCL Control | Proposed Method | ||||
|---|---|---|---|---|---|---|---|---|---|
| Down | up | Down | up | Down | up | Down | up | ||
| 1000 | 225 | −55 | −67 | −30 | −31 | −20 | −21 | −7 | −8 |
| 800 | 181 | −44 | −49 | −6 | −18 | −9 | −11 | −5 | −6 |
| 600 | 136 | −26 | −33 | −25 | −33 | −19 | −24 | −4 | −6 |
| 400 | 80 | −15 | −15 | −11 | −11 | −16 | −16 | −4 | −4 |
| Average deviation (W) | / | −35 | −41 | −18 | −23.3 | −16 | −18 | −5 | −6 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, Y.; Liu, X.; Zhang, J.; Zhang, Y.; Zhu, Z. A Novel Maximum Power Point Tracking Control Strategy for the Building Integrated Photovoltaic System. Energies 2020, 13, 2679. https://doi.org/10.3390/en13112679
Liu Y, Liu X, Zhang J, Zhang Y, Zhu Z. A Novel Maximum Power Point Tracking Control Strategy for the Building Integrated Photovoltaic System. Energies. 2020; 13(11):2679. https://doi.org/10.3390/en13112679
Chicago/Turabian StyleLiu, Yuhang, Xiangxin Liu, Jianwei Zhang, Yufeng Zhang, and Ziyao Zhu. 2020. "A Novel Maximum Power Point Tracking Control Strategy for the Building Integrated Photovoltaic System" Energies 13, no. 11: 2679. https://doi.org/10.3390/en13112679
APA StyleLiu, Y., Liu, X., Zhang, J., Zhang, Y., & Zhu, Z. (2020). A Novel Maximum Power Point Tracking Control Strategy for the Building Integrated Photovoltaic System. Energies, 13(11), 2679. https://doi.org/10.3390/en13112679