1. Introduction
Nonlinearity is a crucial characteristic of power system signals, which can be used to highlight various physical behaviors, such as frequency interactions [
1,
2,
3,
4,
5], interharmonic effects on power systems [
5,
6], incipient failures [
2], noise cancellation [
7], and phase coupling (PC) [
3,
4,
7]. Several classical techniques for rotating asymmetry assessment such as imbalance and bending shafts have been verified to work over the last few years [
4,
6,
7,
8,
9,
10,
11,
12,
13]. In most cases, these conventional techniques do not take into account all the situations, as their application requires signal linearity and stationary hypotheses [
14,
15,
16,
17,
18,
19].
The main idea is that as these systems degrade, they tend to become more nonlinear, generating new frequency components [
20,
21,
22,
23,
24]. These new frequencies are phase-coupled with the main (original) interaction frequencies; these phenomena are called nonlinear interactions (NITs). The PC correlation between the two interacting frequencies and the new frequency is the well-known quadratic phase coupling (QPC) and has been known as NTI “true” signature in dynamic systems [
5,
7,
20,
25,
26]. Detection of QPC relationships presented in a signal is, therefore, a significant factor in understanding nonlinear physical systems such as power generation ones. Bicoherence, a standardized version of the bispectrum, is extensively used as an index of the QPC degree in the signal of interest [
5].
Power spectrum density (PSD), dependent on Fourier Transform (FT), can be exploited to analyze signals in the frequency domain. Whereas FT is a linear analysis tool, it, however, does not contain any QPC information [
27,
28,
29,
30,
31,
32]. It is, therefore, not appropriate when considering NITs. In contrast to the PSD estimate, bispectrum has proven its usefulness as a powerful tool for detecting QPC associated with NITs. In [
5,
25], bispectrum or bicoherence has been used to analyze NIT when diagnosing and detecting faults in complex power systems.
In the last decade, higher-order statistics (HOS) has attracted much attention from research teams. For instance, it has been suggested a bearing fault diagnosis method called bispectrum-based empirical mode decomposition [
4]. This method has been successfully applied for the analysis of induction machine vibration signals and NIT effects around the resonance frequency band. In this case, it has been claimed that an electromechanical system might have multiple natural frequencies that cover a vast frequency range. For example, a lower one may be in the 1–2 kHz range and a higher one may be over 5 kHz. In their case study, it just so happened that the second intrinsic mode function (IMF2) explained the very natural frequency that is strong and also strongly modulates (couples with) the bearing defect frequency. Depending on how high the data acquisition frequency is (e.g., 10 kHz, 20 kHz, or 50 kHz), the IMF2 might explain a lower or higher natural frequency that is weakly coupled with the bearing defect frequency. Thus, applying the proposed reduction noise method only to the first IMFs might give the best result. In [
7], it has been recently proposed a theoretical and practical deterministic bispectrum-based context of coupled harmonics and its application to rotor fault diagnosis subjected to noise effects. However, there are remaining some problems to be dealt with, namely the selection of the theoretical formulation showing the noise cancellation when applying the bispectrum. In [
9], signal bispectrum with various periodic components is considered. A diagnosis scheme, using a theoretical result, is then derived and proved to be efficient when applied for helicopter gearbox vibration signals. A new method using wavelet packet energy (WPE) as well as modulation signal bispectrum (MSB) investigation for gearbox fault diagnosis has been proposed in [
10]. First, the raw vibration signals are turned into different time–frequency segments using wavelet packet decomposition (WPD), and then WPE is calculated in a one by one time–frequency segment. The MSB analysis is then applied to the reconstructed signal to achieve the fault characteristic frequency estimation for the gearbox failure diagnosis. In [
11], a theoretical approach for an induction machine flux signal-based fault diagnosis is developed. In this case, the proposed approach was based on the sum of the bispectrum module mean value and the square value of the autocovariance function median. The achieved results seemed promising in discriminating between healthy and faulty states. An earlier study, carried out for reciprocating compressor failure diagnosis using motor current [
12], has shown that random noise can be substantially removed with the MSB. MSB is a continuation of the common bispectrum for characterizing modulation signals as it conserves not just the main properties of HOS but also gives a sparse representation of complicated sidebands.
To the best of the authors’ knowledge, the QPC problem has been barely considered from the theoretical approach. In reference to the approach provided in [
7,
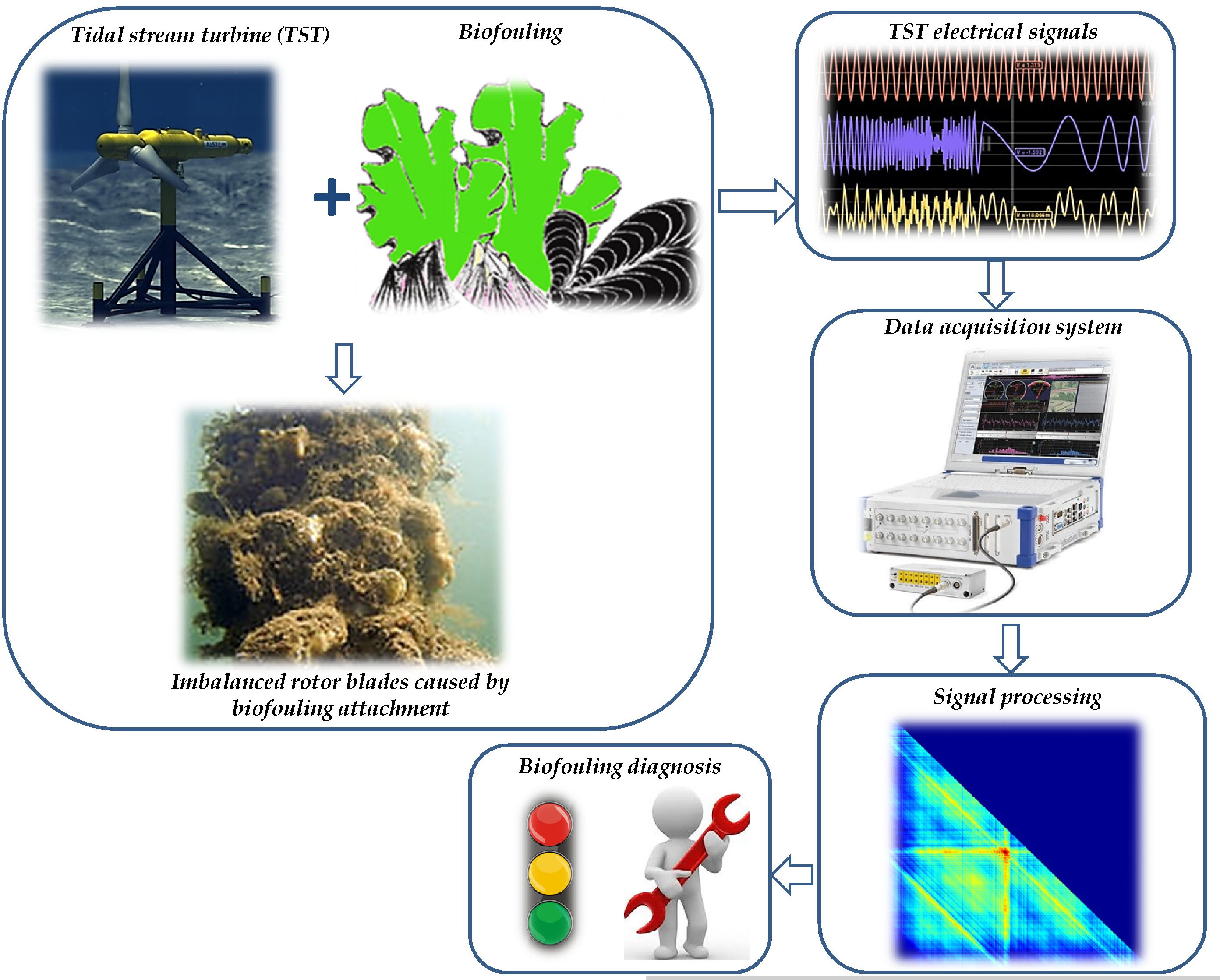
8], this paper aims to give a comprehensive account of the use of the bispectrum to reveal a possible QPC between frequency components in stator current signals of a permanent magnet synchronous generator (PMSG)-based tidal stream turbine (TST) affected by an unbalance fault as a consequence of biofouling and under emulated wave and turbulence conditions.
Converting the huge power of oceans into reliable electricity is one of the great engineering challenges of our time. TST exploits the kinetic marine currents energy to produce electricity [
15,
16]. Underwater conditions such as high material corrosion, since the saltwater is so corrosive, marine biofouling (the creatures that attach themselves to anything submerged in the ocean) lead to degradation that requires an extra level of care and maintenance.
Hence, the purpose of the present work is the analysis and interpretation of the TST PMSG bispectra stator current subjected to imbalanced rotor blades caused by biofouling.
The rest of the paper is organized as follows. In
Section 2, TST issues and challenges are first discussed. In
Section 3, a general introductory context is provided to motivate the application of HOS as a signal processing tool. A discussion on the experimental results using bispectrum and spectral kurtosis analysis with theoretical proof are reported in
Section 4. At last,
Section 5 comes with a conclusion and prospective investigations.
2. Tidal Stream Turbine Challenges
Until now, the most used converters to harvest marine current energy are TSTs [
17,
23]. Tidal currents, as distinguished from many other sources of renewable energy, are a reliable form of kinetic energy produced by regular and periodical tidal cycles. Since tidal current energy production is not influenced by weather, it is predictable for hundreds of years in advance [
17,
23]. Thanks to the higher density of water, this explains that the blades can be smaller and rotate more slowly while producing a significant amount of power. Moreover, this natural predictability of tidal energy is very attractive for grid management, taking away the dependence on fossil fuel power plants. TSTs are mounted on the seabed at sites with high tidal and continuous ocean current velocities, where they capture energy from the flowing water.
Two main TSTs have been identified; horizontal axis as well as vertical axis TSTs, illustrated in
Figure 1 [
15,
16].
Figure 2 depicts the severe environment in which TSTs operate. These systems are subject to random current waves and high turbulence effects produced from the irregular seabed. TSTs are designed to operate in high and variable marine current velocity sites where there is a huge amount of kinetic energy to be transformed into electricity [
23]. This clearly highlights that TSTs will be subjected to very challenging conditions throughout their service life.
TSTs have an operational life of 25 years, with a maintenance cycle of five years [
17]. During these long periods, due to harsh marine environmental conditions, such as high corrosion of materials, or marine biofouling due to an accumulation of microorganisms, plants, algae, and animals on immersed structures (
Figure 3). This accumulation will often lead to mechanical imbalances, etc. (
Figure 4). The above-mentioned factors imply frequent treatments and repairs, which are costly processes. Therefore, there is a strong need to reduce such monitoring as much as possible to improve the availability of TSTs. In [
17], the main challenges for TSTs were reviewed and potential solutions were proposed, such as the use of alloy steel blades that avoid corrosion and have high structural strength. Research to address these challenges is still ongoing.
TSTs condition monitoring is a challenging task of paramount importance due to systems offshore location and immersion conditions. In this regard, there is an obvious need for high reliability given the severe maintenance access limitations. In marine environmental conditions, biofouling can easily cause barriers and/or rise the weight and drag, thus substantially affecting the TST effectiveness [
16]. Early detection of biofouling inception is one of the keys to improving TSTs reliability. In the available literature, attempts have been made to propose methods to diagnose TSTs rotor blade imbalances due to biofouling [
13,
14,
16]. In such tidal stream energy harvesting systems, an imbalance fault typically induces cyclic impulses in the stator current. In this case, conventional time-series analysis is not appropriate since impulses are most of the time buried in background noise or other undesirable frequency components [
29,
31]. To deal with this issue, advanced signal processing techniques are targeted.
In this paper, the authors propose using HOS analysis to detect impulsive effect present in TST PMSG stator current signal, which is due to artificially created blades imbalance fault.
TST electrical signals are non-Gaussian and remarkably nonlinear [
8,
14,
23]. Therefore, we suggest the use of HOS-based signal processing methods for the analysis and diagnosis of a TST experiencing blades imbalance caused by biofouling.
3. Higher-Order Statistics Analysis: Definitions and Properties
3.1. Higher-Order Moments
In probability and statistics assumptions, the
n-order central moment of a random variable
X is determined as the expected quality of integer power,
n, of the random variable
X surrounding its mean, in accordance with the following formula [
1,
2]:
where
E{.} indicates the expected value operator, superscript
(n) defines the order of the central moment, and
fX(
x) is the probability density function of
X. Hence, the mean value is equal to zero,
mx(2) and
mx(3) represent the mean square value, and the mean cube value, respectively, and so forth.
HOS signal analysis involves a generalization of different order moments regarding a random variable to moment functions (i.e., correlation functions) about a random process. So, it is mathematically required to suppose that the random process has zero-mean for ease of computation. Under practical conditions, when handling real stator current data from monitored electromechanical systems, the signal mean is firstly computed and deduced from the signal.
Following the mathematical bases of HOS analysis, diverse order correlation functions may be calculated for the random process as listed below [
1,
2]:
where the superscript asterisk (*) represents the complex conjugate. It is noticed that the second-order correlation function
Rxx(
τ) is the well-known autocorrelation function. The third-order correlation function
Rxxx(
τ1,
τ2) is often called a bicorrelation function. The fourth-order correlation function
Rxxxx(
τ1,
τ2,
τ3) is often called tricorrelation, and so forth.
When examining linear signals and systems, it is sufficient to consider Equations (2) and (3), which corresponds to a weakly stationary signal. For three harmonic signals interaction in a quadratically nonlinear situation as will be further addressed, a random signal is supposed to be stationary to the third-order (Equations (4) and (5)).
3.2. Power Spectrum
Power spectrum (PS) is a one-dimensional function of frequency and has been revealed to be highly potent in modeling linear physical problems. The discrete PS is the FT of the autocorrelation
Rxx(
τ) [
1,
2,
28,
29,
30,
31] and can be estimated by
where
X* represents the complex conjugate of
X and
X(
f) is the discrete FT of
x(
n).
Since all information about the phase is discarded in computing the PS, it is unable to detect PC signatures.
3.3. Bispectrum and Bicoherence
Bispectrum, a third-order autocorrelation function
Rxxx(
τ1,
τ2) 2D FT, is performs well in detecting and quantifying QPC [
1,
2,
28]. Meanwhile, it describes statistical links between signal frequency components. It is defined as
For the bispectrum to be nonzero at (f1, f2), the FTs at frequency components f1, f2, and f1 + f2 must be nonzero. Moreover, these three spectral components must be correlated. Note that, once the expectation is performed, the bispectrum will be zero owing to phase randomization and if phases are coupled it does not. Unlike the PS, even though the signal is real-valued, its bispectrum is complex.
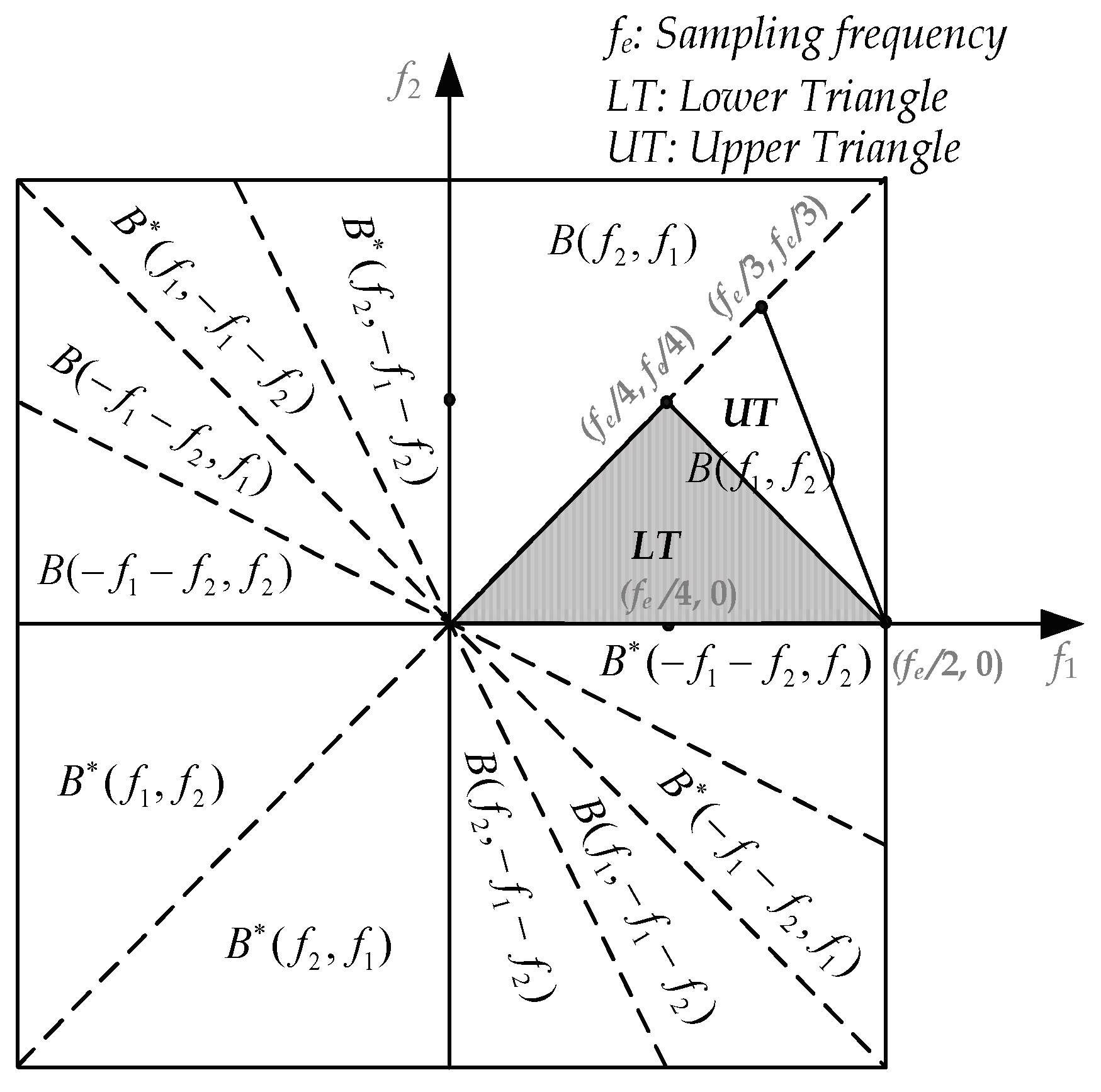
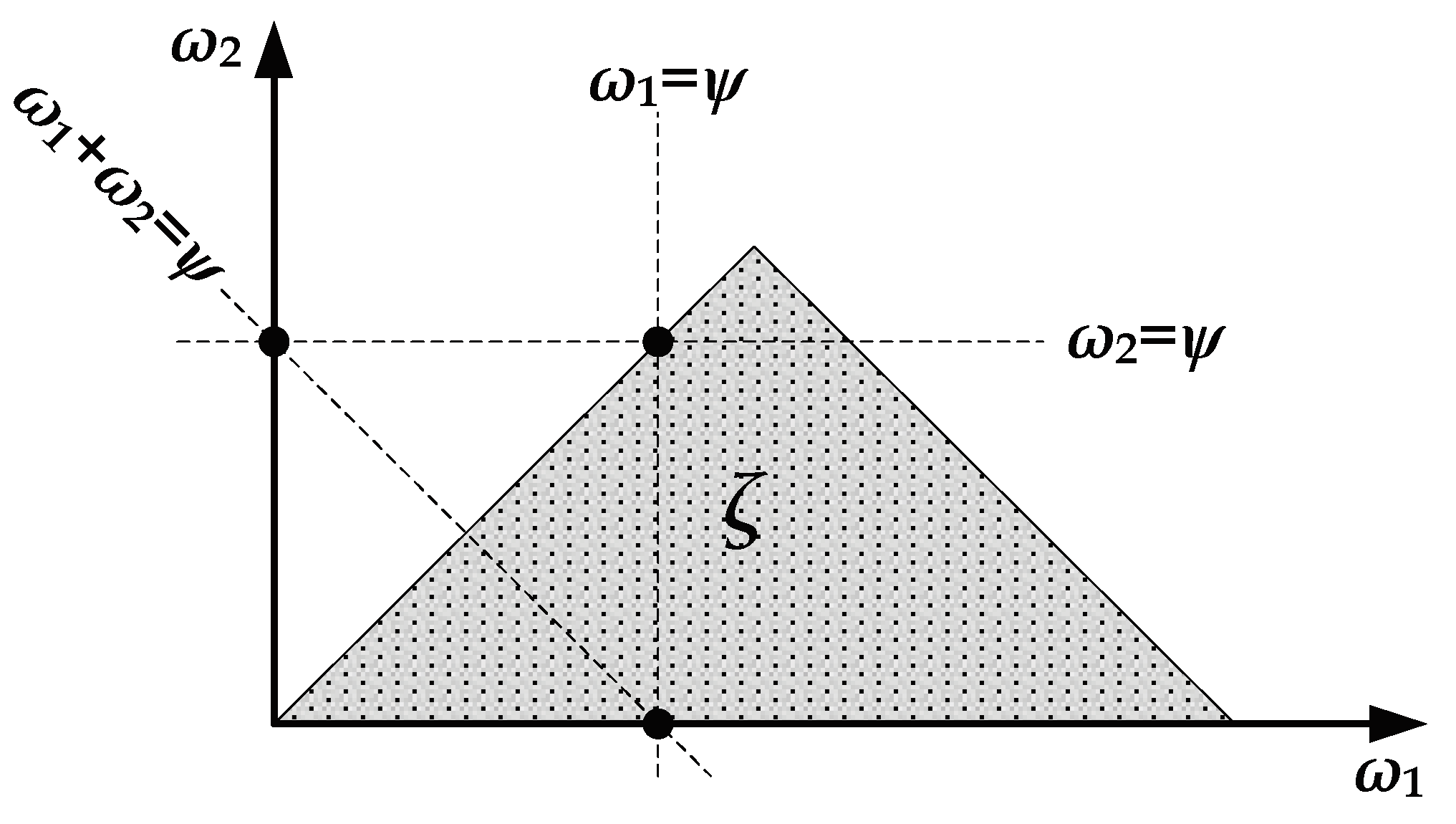
The bispectrum symmetric regions are described in
Figure 4 [
1,
2,
28]. Therefore, the analysis can take into account just a single nonredundant region. In the following, throughout the paper,
B(
f1,
f2) will designate the bispectrum in the nonredundant triangular region ζ shown in
Figure 4 in gray levels scale and described by; ζ = {(
f1,
f2): 0 ≤
f2 ≤
f1 ≤
fe/2;
f1 +
f2 ≤
fe/2}, where
fe is the sampling frequency. Regions of computation are discussed in [
1,
2].
Therefore, bispectrum can be used to effectively solve several practical problems. Examples are expressed as follows [
24,
25,
26]:
- -
If x(n) is a stationary zero-mean Gaussian process, its bispectrum is equally zero;
- -
While the PS deletes all phase information, the bispectrum does not.
The bispectrum is a quantified quantity of HOS. It is the FT of the third-order cumulant or moment. Nonlinearity affects these cumulants that are captured by the bispectrum.
The estimated bispectrum
is defined by
The expectation operation is very significant in this situation and cannot be neglected mainly in QPC detection. It implies “ensemble averaging” for an estimate: if phases are random, the bispectrum tends to zero and if phases are coupled it does not.
The diagonal slice of the bispectrum (DSB) is a one-dimensional representation of the bispectrum by taking
f1 =
f2. This measure is given by [
4,
6,
7]
The bicoherence or the normalized bispectrum in Equation (10) is a measure of the degree of QPC that appears in a signal or between two signals frequency components. As above-mentioned, PC is the estimate of the amount of energy in every potential pair of frequency components,
f1,
f2, which fulfills the definition of QPC (phase of the component at
f3, which is
f1 +
f2, equals phase of
f1 + phase of
f2) [
26,
30]:
when the analyzed signal reveals an arbitrary structure, PC can be expected to occur.
3.4. Bispectrum for Quadratically Nonlinear Systems
A characteristic of all nonlinear phenomena is the generation of “new” frequency components related to the sum and difference combinations of the “
original” NIT frequencies [
25,
31,
32]. These two frequencies (new and initial frequencies) must comply with a specific frequency selection rule that strongly depends on the order of the nonlinearity.
Figure 5 shows a diagram of a general quadratic nonlinear system.
Let us consider
y(
t) to be the output of the following nonlinear system
where the signal
x(
t) consists of two cosine waves at unrelated frequencies,
F0 = 50 Hz and
F1 = 70 Hz, with a sampling frequency of 512 Hz and contains 1024 samples. Parameter
ε denotes the nonlinearity coefficient.
Quadratic interaction implies the multiplication of two spectral components. Hence,
y(
t) can be rewritten in the form of harmonics using basic trigonometric formulas. These relationships are called QPC and are regarded to be a “true” signature of quadratic nonlinear systems [
7,
25,
29]. Note that harmonic random signals (Fourier series development of periodic signals) like those obtained from rotating machinery are not strictly stationary and are mainly cyclostationary. Their autocorrelation and higher-order correlations will be periodic [
18,
19,
20].
In the output of this system, the signal will contain the components with frequencies and phases that are correlated (
Figure 5). Such a phenomenon, which is characterized by these new phase relations, is called QPC and is highlighted by the bispectrum. The PS shows the distribution of the signal energy according to its frequencies. When this consideration is broadened to higher orders, the bispectrum offers information related to signal features such as phase coherence, which is lost in the second-order moment [
1,
2,
24,
25,
26,
27,
28,
30].
The bispectrum formula in Equation (8) indicates that, if the energy at the sum or difference of harmonic components is produced by a nonlinear process, phase coherence among the bifrequency components (F0, F1, F0 + F1) appears and then the statistical average will indicate a nonzero value of the bispectrum result. This is an overall average for an estimate. Thus, if the phases are random, the bispectrum tends towards zero and if the phases are coupled, it is not the case.
Figure 6 considers the application of the bispectrum for QPC detection of the process in Equation (11) with
F0 = 50 Hz,
F1 = 70 Hz, and
ε = 0.1. It should be noted the generation of second harmonics at 100 Hz, 140 Hz, and phase-coupled intermodulation components at
F0 +
F1 = 120 Hz and
F1 −
F0 = 20 Hz in the PS.
The associate bispectrum estimate arising from Equation (8) exhibits a peak at the bifrequency (70, 50) Hz. In practical applications, false peaks may occur in the bispectrum at points without any significant QPC resulting from several issues such as finite data length [
7,
31,
32].
3.5. Bispectrum Gaussian Noise Cancellation
To evaluate the statistical behavior of the bispectrum in response to an additive white Gaussian noise (AWGN), we suppose that the noise
n(
t) is zero-mean Gaussian random variable
. Its discrete FT is also a zero-mean Gaussian random variable
. Where
L is the number of discrete FT samples. Thus, the bispectrum becomes as follows:
As we are focusing on coupled harmonics, the signal of concern generally contains sinusoidal components. Thus, the signal spectral component at particular frequencies can be expressed as magnitude and phase, for example,
. Thus, the bispectrum in Equation (3) can be as follows:
Remembering that magnitude
A and phase
θ of each sinusoidal frequency component are deterministic, then,
E{.} contributes only to noise components, which we will denote as
N1,
N2, and
N3 for simplification purposes. Hence, Equation (13) can be reduced as follows:
In Equation (14), first-order and third-order moments are then equal to zero, .
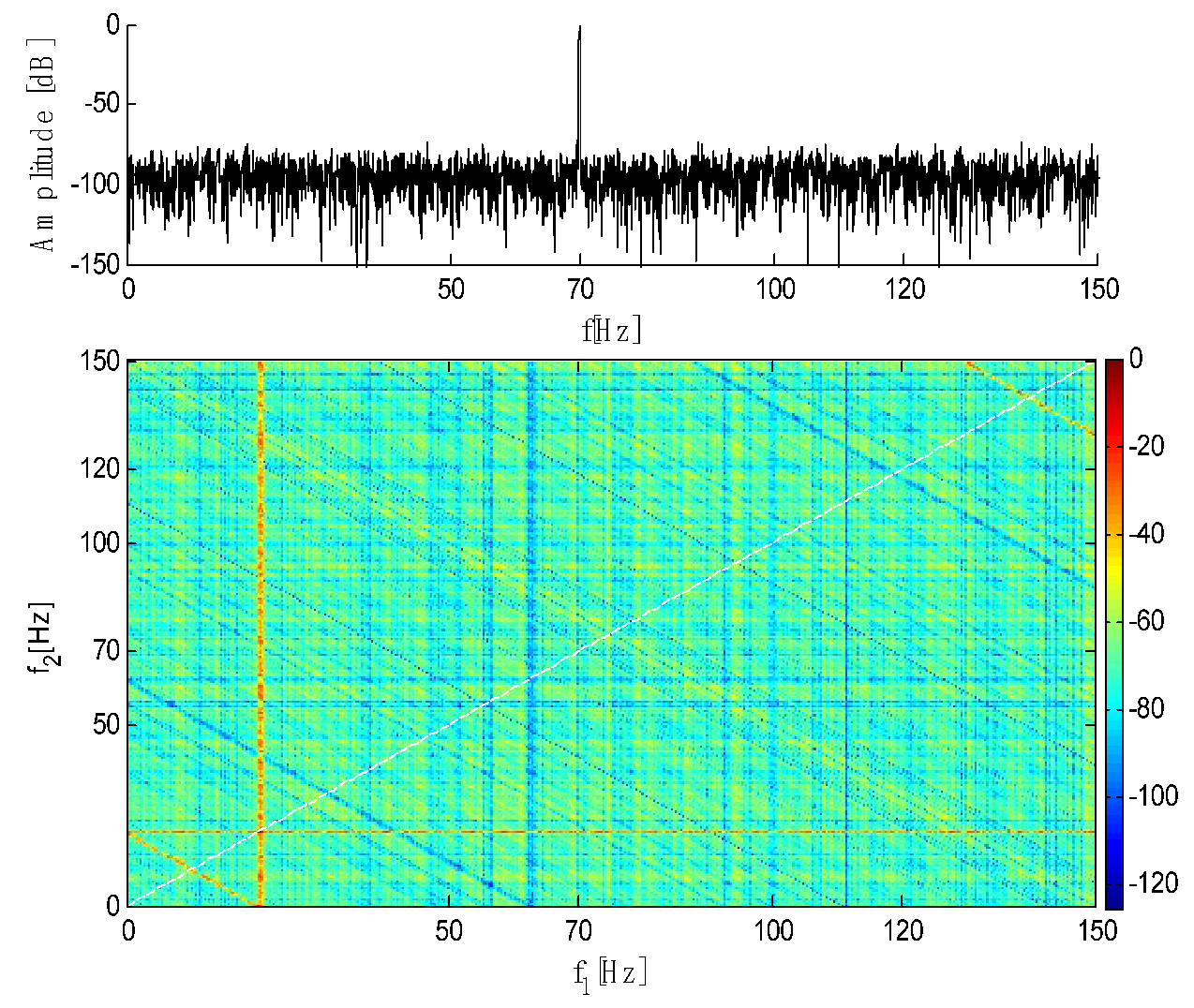
To quantitatively compare PS and bispectrum performance between, let us consider the signal
x(
t) given by the sum of three frequencies
F0 = 50 Hz,
F1 = 70 Hz, and
F2 = 120 Hz in the presence of an AWGN
n(
t) with
σnx2 = 0.15, equivalent to 10 dB signal-to-noise ratio (SNR) defined by
where
σx2 is the variance of the signal
xn(
t).
Comparing power spectra results of
Figure 7 and
Figure 8, it can be seen that signal frequency components are hidden in the noise making the PS more sensitive to noise compared to bispectrum.
Harmonic random signals such as those expected from PMSG-based TSTs are not strictly stationary and are cyclostationary in nature [
19,
20,
25,
27]. Their autocorrelation and higher-order correlations will be periodic. So, another way of the research can be extended to machine condition monitoring. Since the stator current signals of rotating machinery display a highly nonlinear and non-Gaussian behavior, bispectrum is then well appropriate to analyze this kind of signal.
4. Tidal Stream Turbine Experimental Data-Based Tests
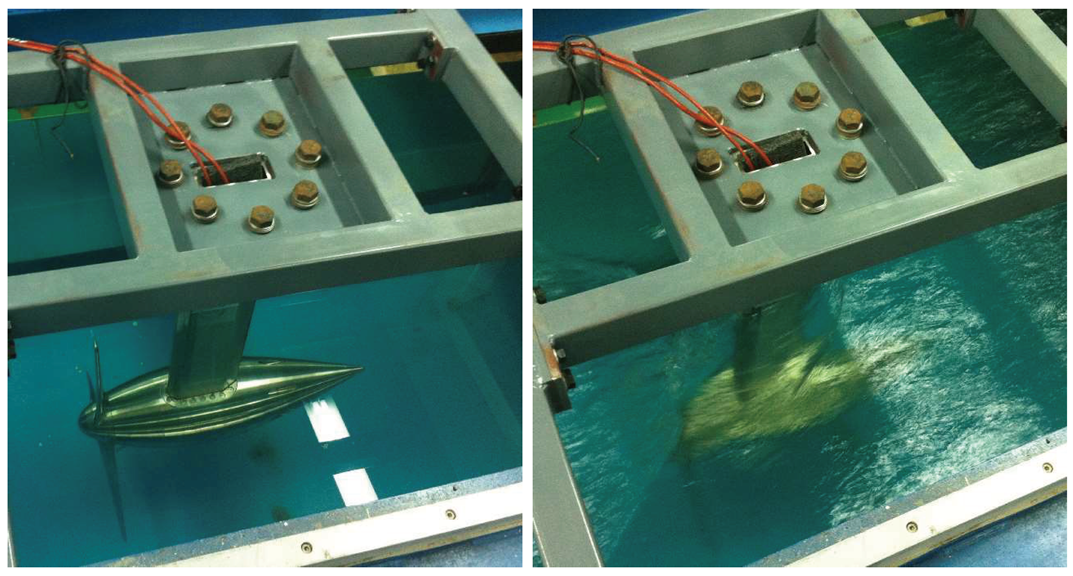
The proposed HOS-based biofouling diagnosis approach is tested on an experimental dataset issued from the Shanghai Maritime University TST plateform. This plateform consists of 230 W/8 pole pairs direct-drive PMSG-based TST operating in a water tunnel emulating waves and turbulences (
Figure 9 and
Figure 10) [
13,
14]. Besides, 19 processing features were handled under varying operating conditions (wave and turbulence,
Figure 11). The biofouling (imbalance fault) was emulated by attaching wire ropes on the rotor blade (
Figure 10). Experimental data collection was made under the following operating conditions: TST blades rotation was set at 120 rpm, the supply frequency
fs was around 15 Hz (actually 15.63 Hz), the data acquisition sampling frequency is 1 kHz, and the number of samples is 178,200.
4.1. PMSG Imbalanced Stator Current Model
Under rotor asymmetry, fault frequencies are determined by
ff =
fs ±
kfr = (1 ±
k/
p)
fs, where
fr is the rotational speed frequency,
fs is the supply frequency component,
p is the pole pairs number, and
k is an integer. With the blade imbalance fault, a simplified model, which describes the TST PMSG stator current, can be defined by [
13,
14]:
where
At is the amplitude of the stator current,
φ the initial angle,
ωm is the PMSG shaft rotating speed, and Δ
ωm is the rotation speed variations.
where
ψ =
p(
ωm + Δ
ωm).
The analytical signal of
is(
t) is
and its FT is
where
ω = 2
πf and
δ(•) represents the Kronecker delta function.
By ignoring negative frequencies, Equation (18) can be written as:
Thus, each frequency component
Is(
ω1),
Is(
ω2),
Is(
ω1 +
ω2) produces one straight line in the (
ω1,
ω2) plane. For instance,
Is(
ω1) will be represented by one line at
ω1 =
ψ. If
Is(
ω1) is substituted from Equation (19) into Equation (8), the assigned bispectrum is equal to
From Equations (19) and (20), current
is(
t) bispectrum has nonzero values in lines intersection points on the (
ω1,
ω2) plane as shown in Equation (21) and in
Figure 12.
4.2. Discussion
To demonstrate the effectiveness of the proposed bispectrum and its diagonal slice approach to detect rotor blade imbalance (with a QPC), both PSD and bispectrum are applied. Results are given in
Figure 13,
Figure 14 and
Figure 15. From
Figure 13, we observe that the PSD is unable to identify any QPC information caused by the imbalance fault effect on the stator current.
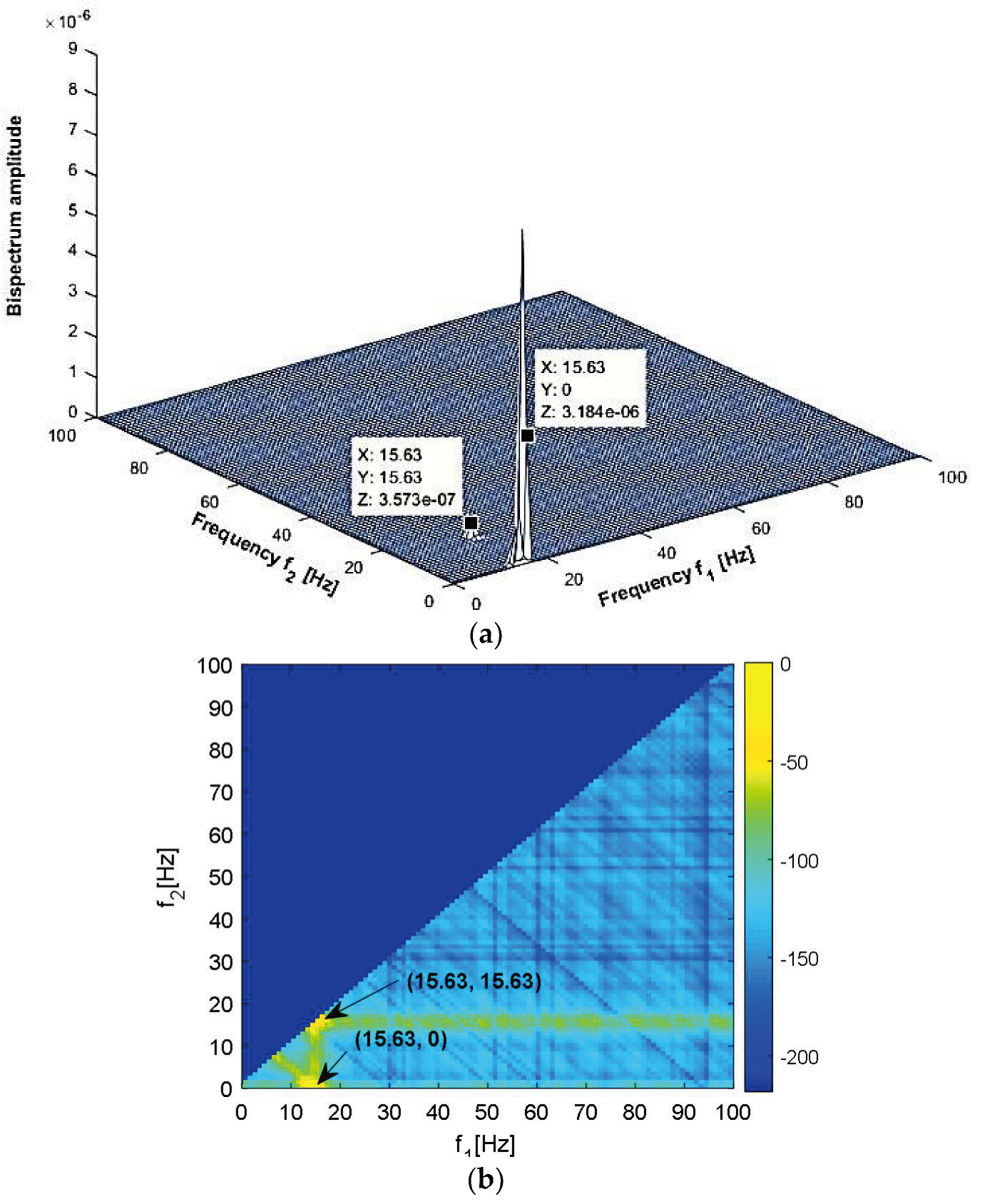
B(fs, fs) is used as a condition indicator to distinguish between the faulty and the healthy blade states. The bispectrum magnitude response, B(fs, fs), shows, in this case, its clear ability to detect the blade imbalance.
Further information can be retrieved from the same stator current data by expanding the analysis to the QPC behavior. The bispectrum magnitude is plotted for the same studied data set, as illustrated in
Figure 14 and
Figure 15. The healthy example shown in
Figure 14 has the least quadratic NIT frequency among the other cases. The highest bispectral peaks occur at the following coordinate bifrequency points: (
fs, 0), (
fs,
fs).
In the rotor imbalance case revealed in
Figure 15, increased frequency interaction along
fs frequency can be seen at the bifrequency coordinates (
fs, 0), (
fs,
fs). An additional interesting observation is the high bispectral peak at (
fs,
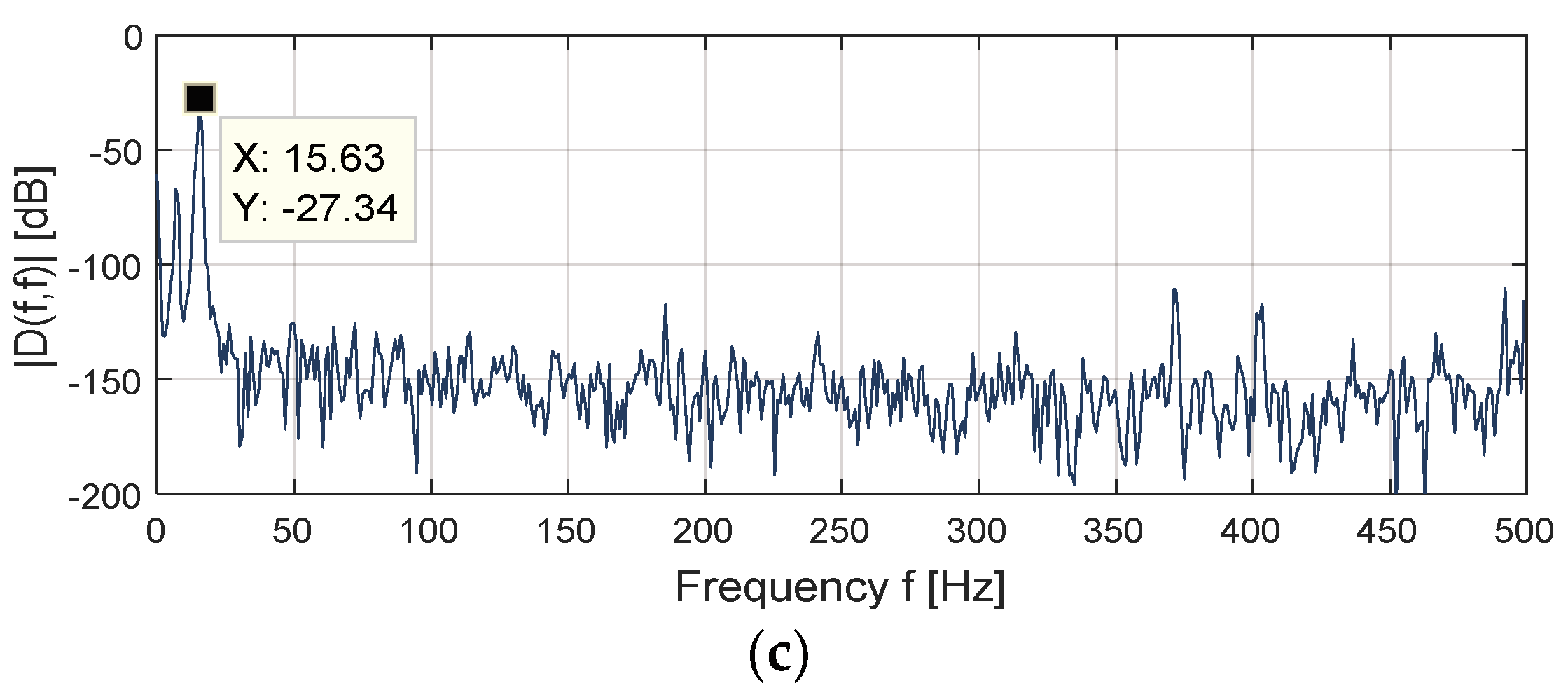
fs) when compared with the healthy case. One can notice from the DSB of the faulty case, shown in
Figure 15, that the peak amplitude is more than two times higher compared to the healthy case.
A deep insight into Equation (20) shows the presence of peaks in the bispectrum. Clearly, it can be identified by the nonzero products among the three terms of Equation (20). If the three
δ(•) functions of each product have the same support, the result is nonzero and the related peaks occur in the bispectrum. From the experimental results shown in
Figure 14 and
Figure 15, it can be seen the existence of two peaks located at (
fs,
fs) and (
fs, 0), that corresponds to (15.63, 15.63) Hz and (15.63, 0) Hz.
In addition to the HOS- and PSD-based signal processing tools, the spectral kurtosis (SK) is a statistical tool, which can identify transient series and their positions in the frequency domain [
17]. The fast kurtogram (FK) proposed in [
18] is a benchmark method for fault detection [
18,
19,
20,
21,
22].
The SK of a signal
x(
t) is given by [
18]:
where <•> denotes the time–frequency averaging operator,
X4(
t,
f) and
X2(
t,
f) are respectively the fourth- and second-order spectral cumulants of
x(
t) band-pass filtered signal around
f. Constant 2 is used since
X(
t,
f) is the complex envelope of
x(
t) at frequency
f.
From the SK definition in Equation (22), we can deduce:
- -
SK of a stationary process is a constant frequency function;
- -
SK of stationary Gaussian processes are similar.
However, the kurtosis value depends on both the central frequency
fc and the related bandwidth
Bw. It is, therefore, difficult to define the decomposition mode [
18,
19,
20]. In practice, several combinations of different central frequencies and bandwidths have to be tested to find an appropriate frequency band for signal envelope analysis, which requires extensive computations.
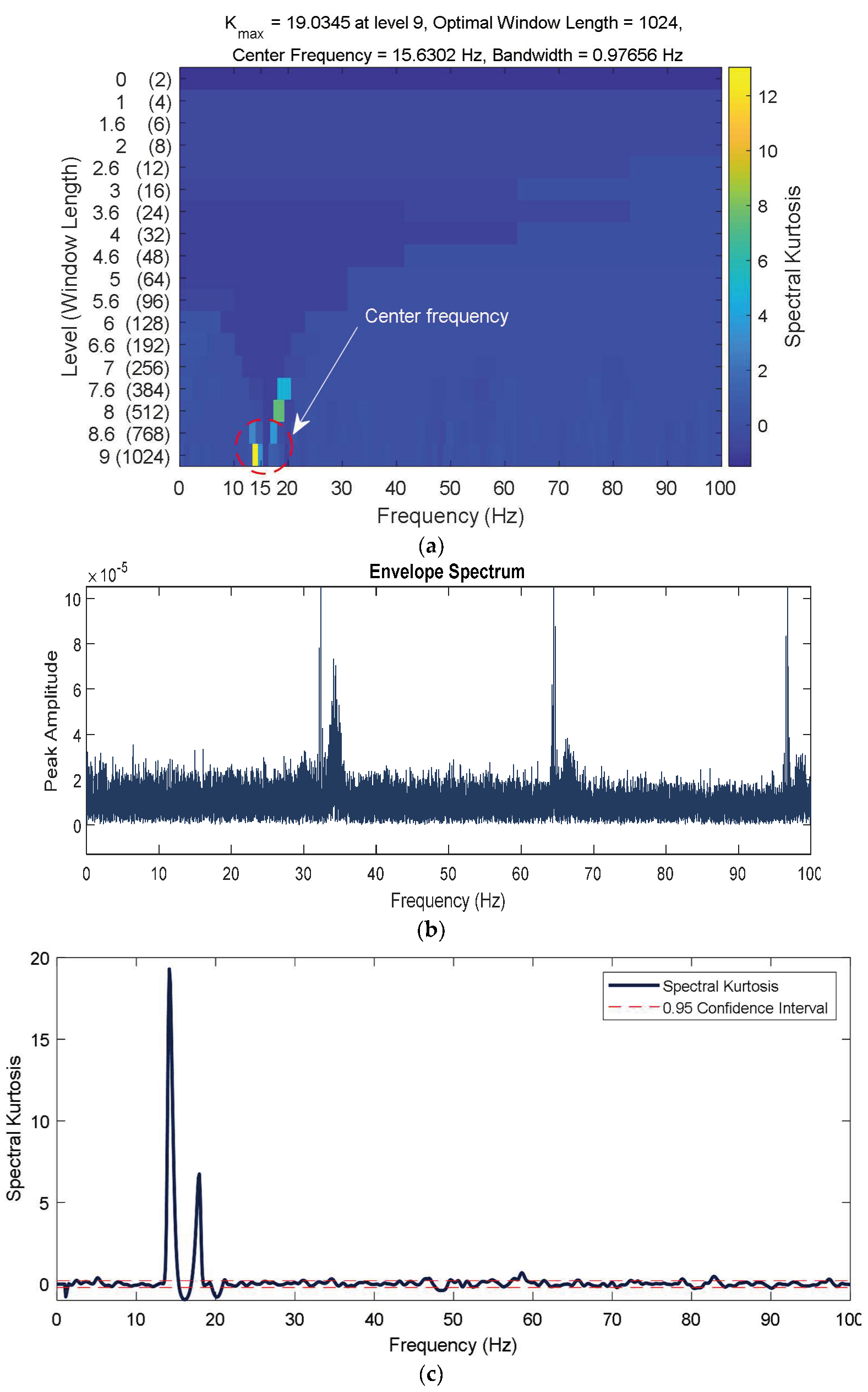
The achieved results are illustrated in
Figure 16. The kurtogram is shown by
Figure 16a, where the optimal bandwidth
Bw and optimal carrier frequency
fc of the band-pass filter are set to 0.97 Hz and 15.63 Hz, respectively, while
Figure 16b,c displays the filtered TST based PMSG stator current signal envelope spectrum and SK. As can be seen from
Figure 16b, there is an apparent frequency impulse at the imbalance fault frequency (15.63 Hz) and its related harmonics, which suggests that the FK method can successfully identify the correct frequency resonance band and obtain the significant fault characteristic.

 ,
, 





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
















