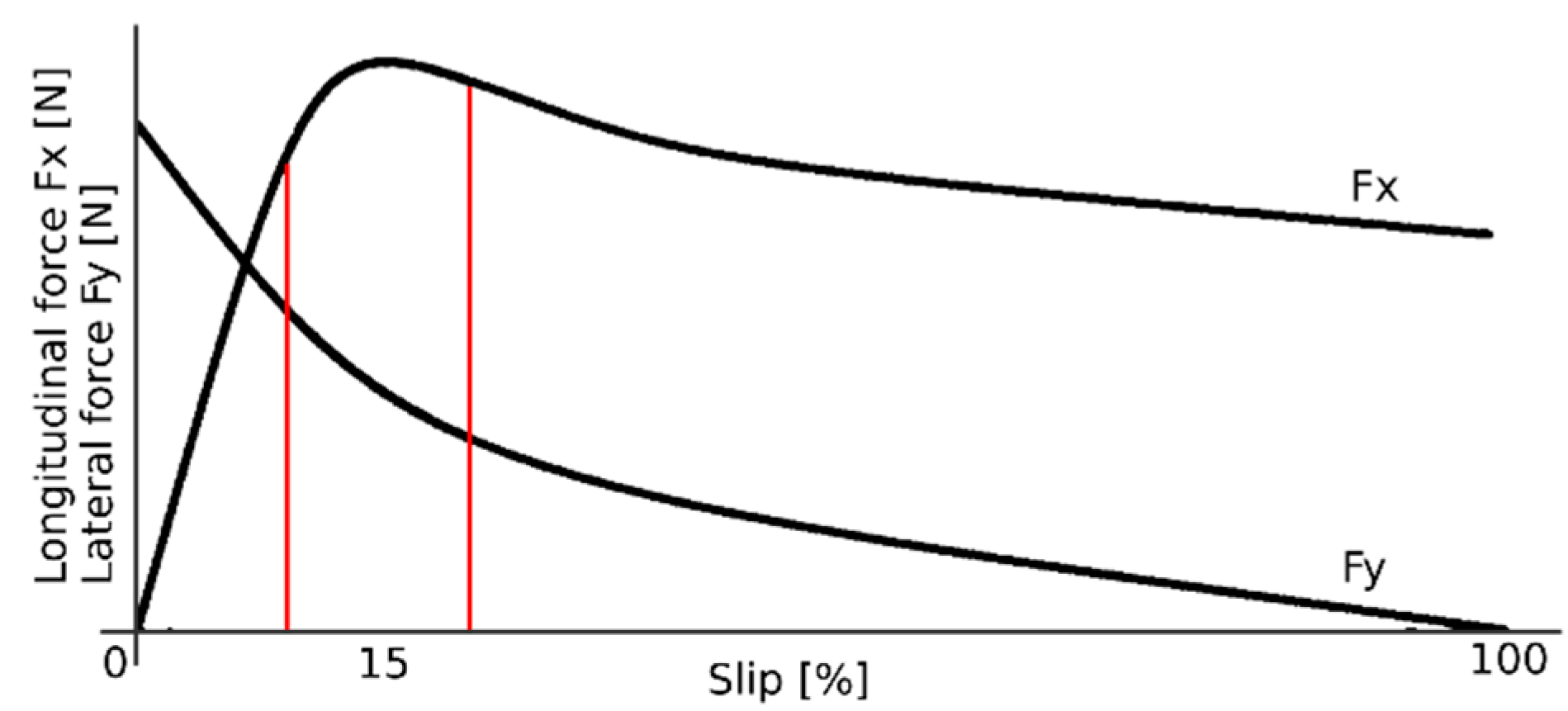
Figure 1.
Slip characteristics of tires with radial construction.
Figure 1.
Slip characteristics of tires with radial construction.
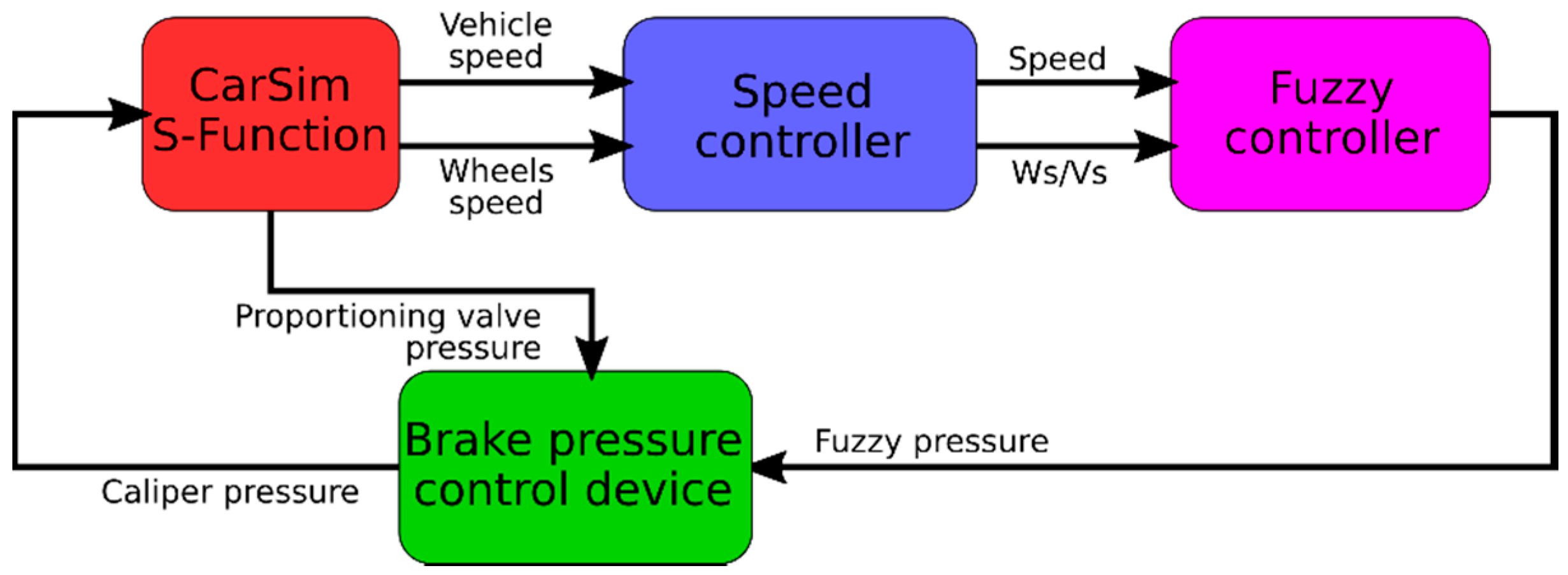
Figure 2.
Basic scheme of the vehicle brake system.
Figure 2.
Basic scheme of the vehicle brake system.
Figure 3.
Brake system—basic scheme of generating mechanical braking torque.
Figure 3.
Brake system—basic scheme of generating mechanical braking torque.
Figure 4.
Block scheme of ABS control model.
Figure 4.
Block scheme of ABS control model.
Figure 5.
Block scheme of ABS control with fuzzy controller.
Figure 5.
Block scheme of ABS control with fuzzy controller.
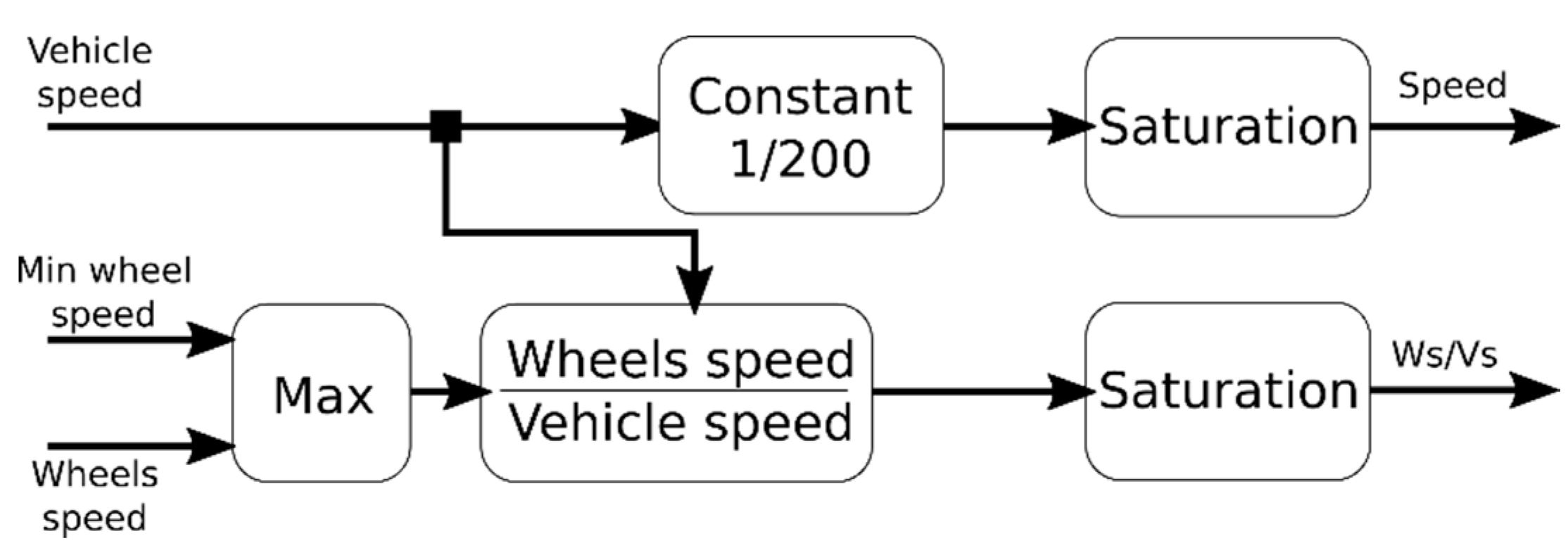
Figure 6.
Block scheme of the speed controller.
Figure 6.
Block scheme of the speed controller.
Figure 7.
Block scheme of the fuzzy controller.
Figure 7.
Block scheme of the fuzzy controller.
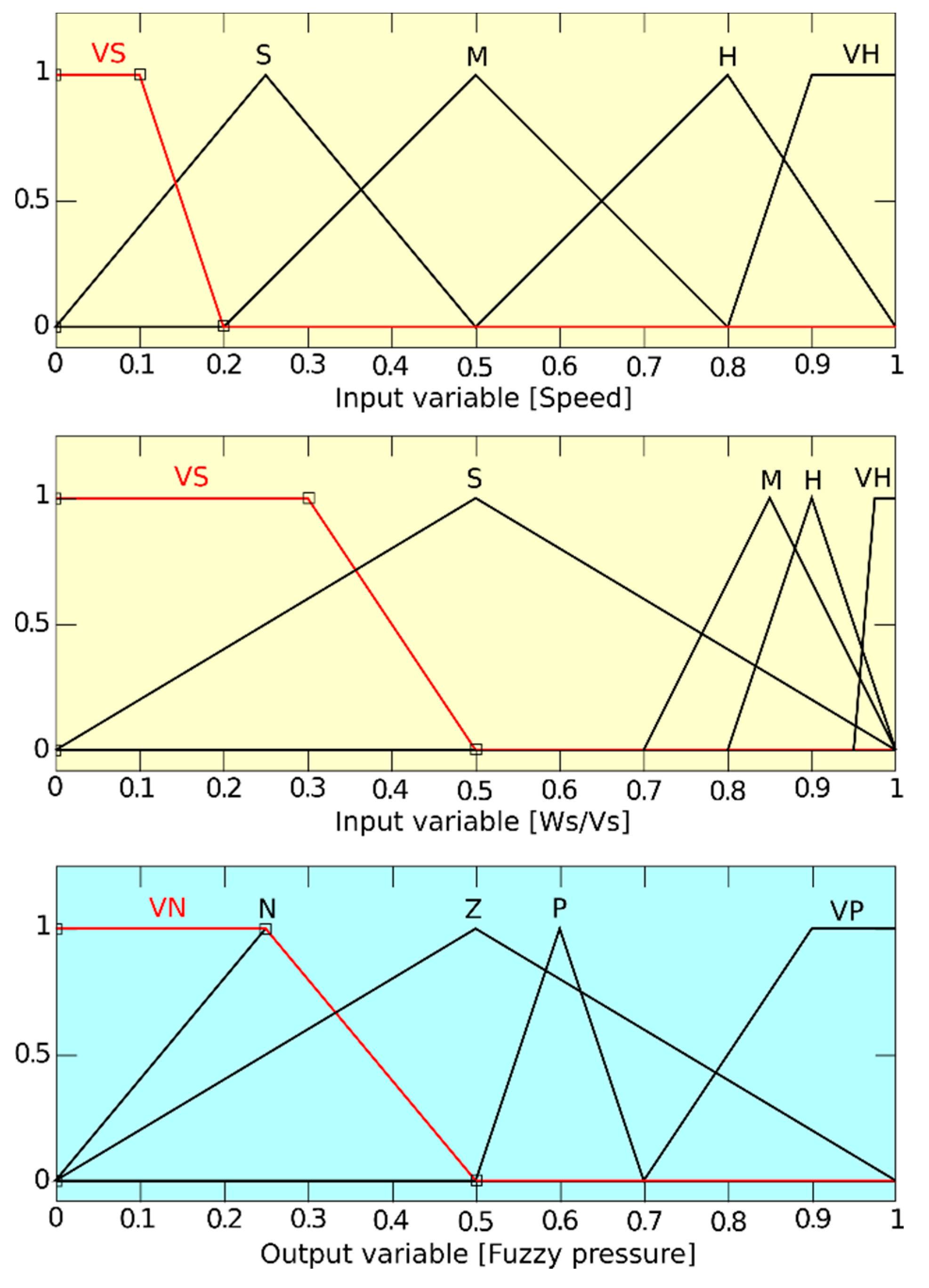
Figure 8.
Setting rules of FIS matrix for fuzzy controller.
Figure 8.
Setting rules of FIS matrix for fuzzy controller.
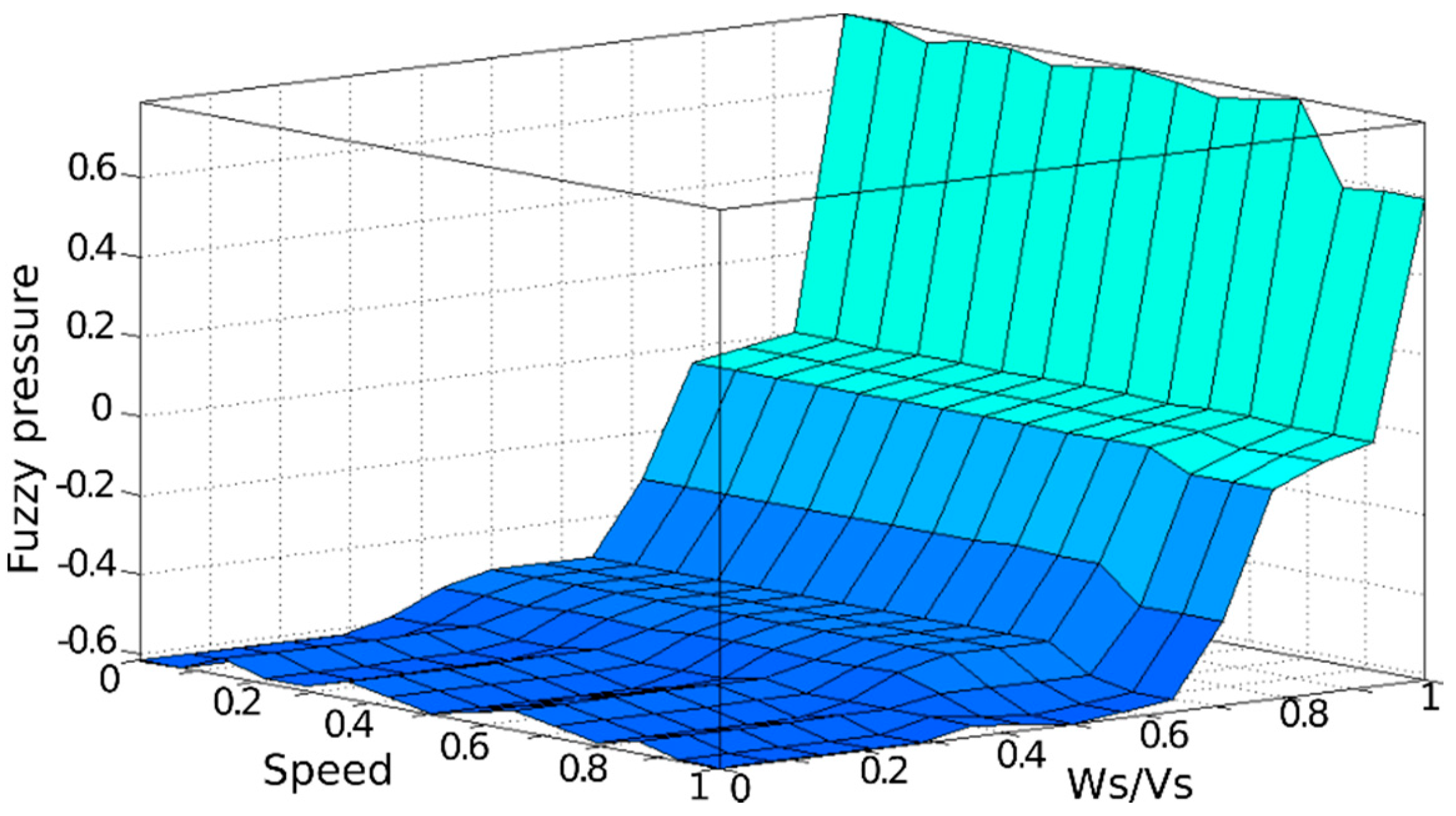
Figure 9.
Graph showing the dependence of output variable on the input variables in the fuzzy controller.
Figure 9.
Graph showing the dependence of output variable on the input variables in the fuzzy controller.
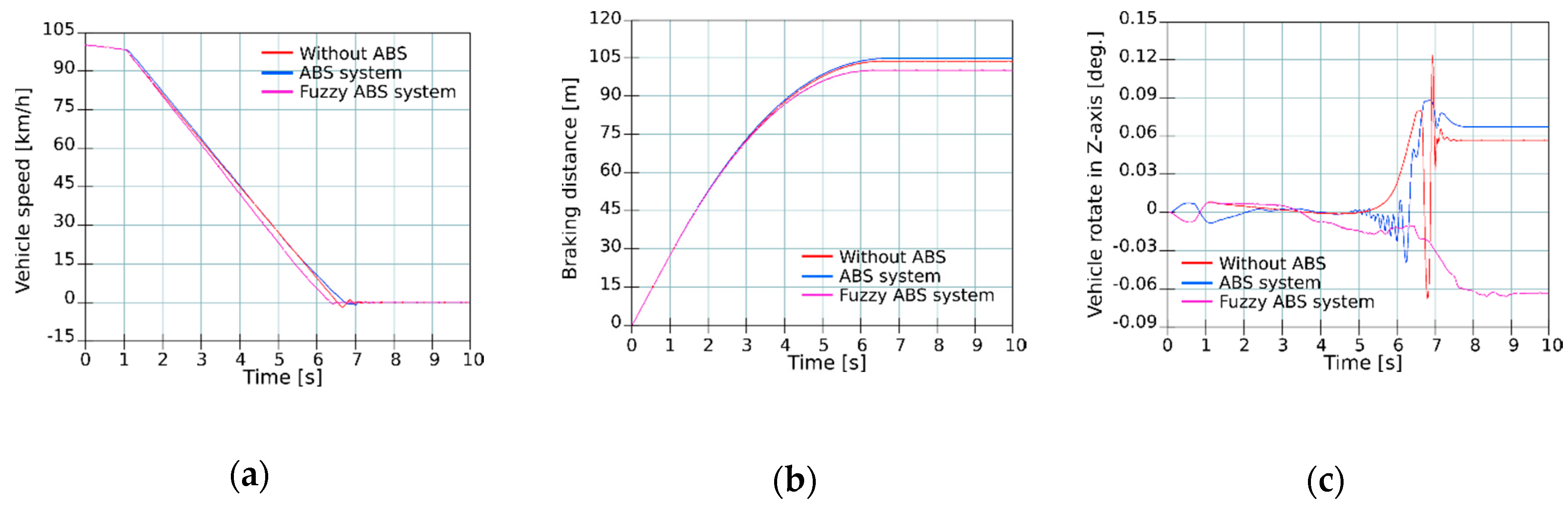
Figure 10.
Test on dry road at speed 100 km/h—(a) Speed curve; (b) Braking distance; (c) Vehicle rotation.
Figure 10.
Test on dry road at speed 100 km/h—(a) Speed curve; (b) Braking distance; (c) Vehicle rotation.
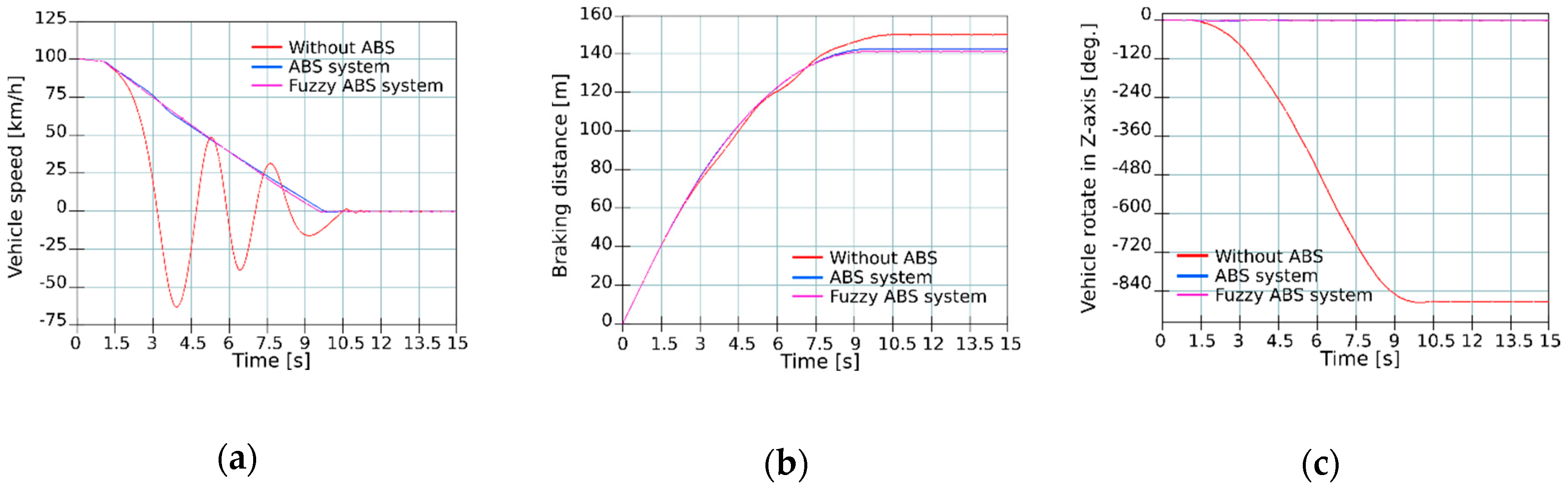
Figure 11.
Test on dry road at speed 140 km/h—(a) Speed curve; (b) Braking distance; (c) Vehicle rotation.
Figure 11.
Test on dry road at speed 140 km/h—(a) Speed curve; (b) Braking distance; (c) Vehicle rotation.
Figure 12.
Test on road with combined adhesion at speed 100 km/h—(a) Speed curve; (b) Braking distance; (c) Vehicle rotation.
Figure 12.
Test on road with combined adhesion at speed 100 km/h—(a) Speed curve; (b) Braking distance; (c) Vehicle rotation.
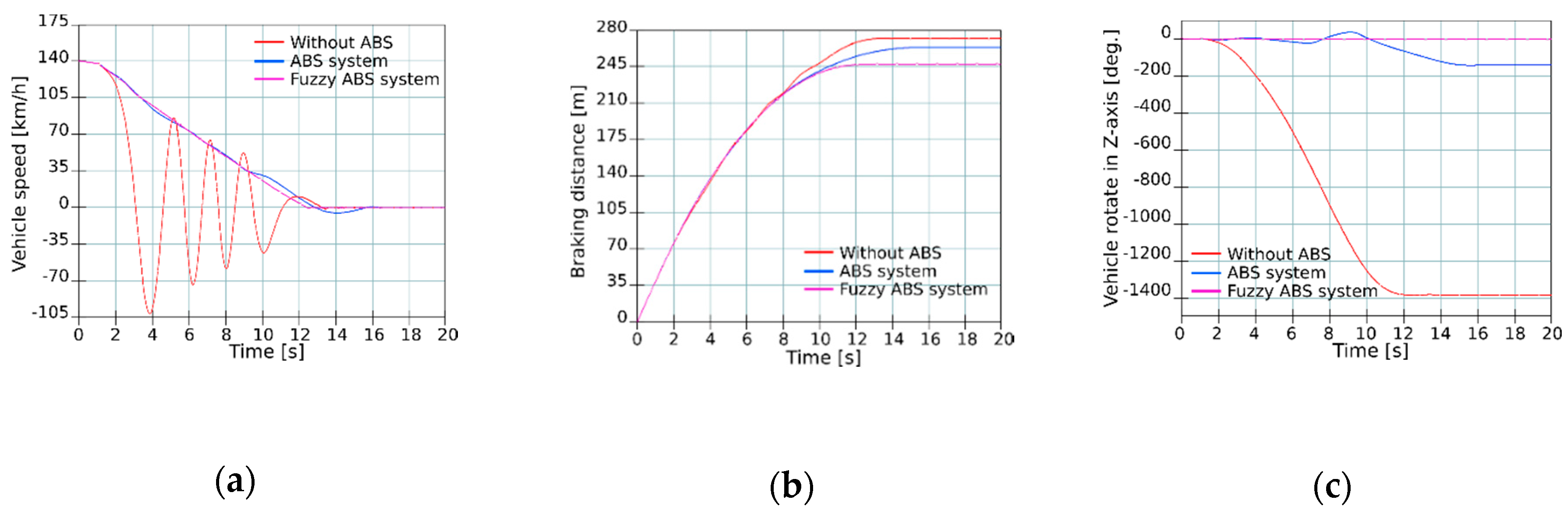
Figure 13.
Test on road with combined adhesion at speed 140 km/h—(a) Speed curve; (b) Braking distance; (c) Vehicle rotation.
Figure 13.
Test on road with combined adhesion at speed 140 km/h—(a) Speed curve; (b) Braking distance; (c) Vehicle rotation.
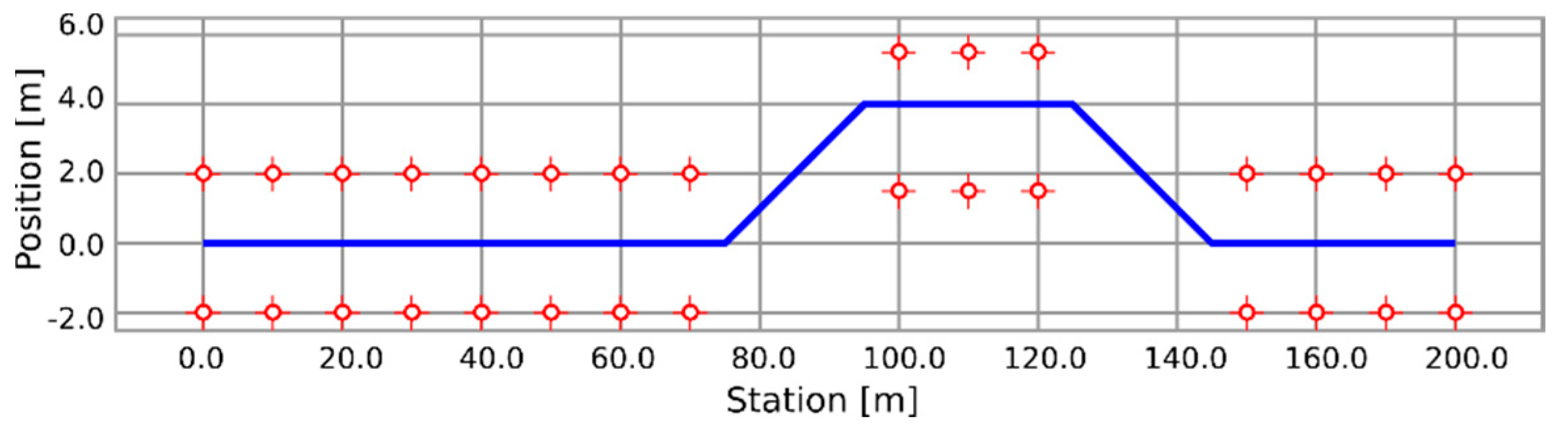
Figure 14.
Road during maneuverability test.
Figure 14.
Road during maneuverability test.
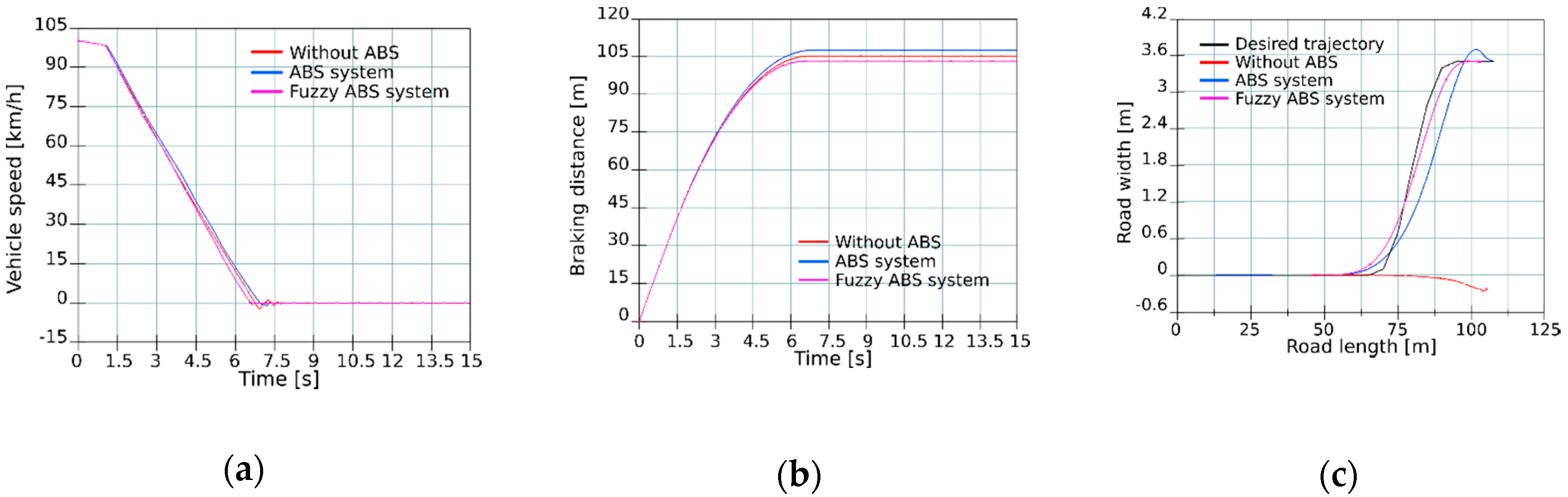
Figure 15.
Maneuverability test on dry road at speed 100 km/h—(a) Speed curve; (b) Braking distance; (c) Vehicle trajectory.
Figure 15.
Maneuverability test on dry road at speed 100 km/h—(a) Speed curve; (b) Braking distance; (c) Vehicle trajectory.
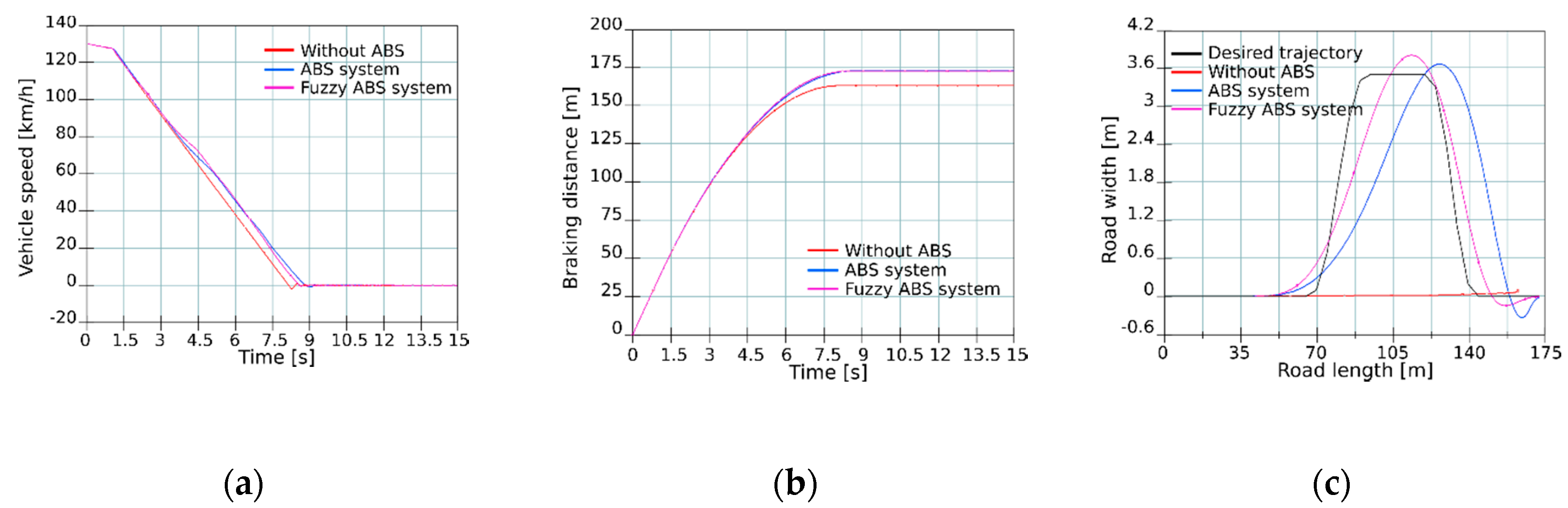
Figure 16.
Maneuverability test on dry road at speed 130 km/h—(a) Speed curve; (b) Braking distance; (c) Vehicle trajectory.
Figure 16.
Maneuverability test on dry road at speed 130 km/h—(a) Speed curve; (b) Braking distance; (c) Vehicle trajectory.
Figure 17.
Graphical comparison of the test on dry road.(a): Graphical comparison of the braking distance during a dry road test at a vehicle speed of 100 km/h; (b): Graphical comparison of the braking time during a dry road test at a vehicle speed of 100 km/h; (c): Graphical comparison of the vehicle rotation in z-axis during a dry road test at a vehicle speed of 100 km/h; (d): Graphical comparison of the braking distance during a dry road test at a vehicle speed of 140 km/h; (e): Graphical comparison of the braking time during a dry road test at a vehicle speed of 140 km/h; (f): Graphical comparison of the vehicle rotation in z-axis during a dry road test at a vehicle speed of 140 km/h.
Figure 17.
Graphical comparison of the test on dry road.(a): Graphical comparison of the braking distance during a dry road test at a vehicle speed of 100 km/h; (b): Graphical comparison of the braking time during a dry road test at a vehicle speed of 100 km/h; (c): Graphical comparison of the vehicle rotation in z-axis during a dry road test at a vehicle speed of 100 km/h; (d): Graphical comparison of the braking distance during a dry road test at a vehicle speed of 140 km/h; (e): Graphical comparison of the braking time during a dry road test at a vehicle speed of 140 km/h; (f): Graphical comparison of the vehicle rotation in z-axis during a dry road test at a vehicle speed of 140 km/h.
Figure 18.
Graphical comparison of the test on road with combined adhesion. (a): Graphical comparison of the braking distance during a test on a road with combined adhesion at speed of 100 km/h; (b): Graphical comparison of the braking time during a test on a road with combined adhesion at speed of 100 km/h; (c): Graphical comparison of the vehicle rotation in z-axis during a test on a road with combined adhesion at speed of 100 km/h; (d): Graphical comparison of the braking distance during a test on a road with combined adhesion at speed of 140 km/h; (e): Graphical comparison of the braking time during a test on a road with combined adhesion at speed of 140 km/h; (f): Graphical comparison of the vehicle rotation in z-axis during a test on a road with combined adhesion at speed of 140 km/h.
Figure 18.
Graphical comparison of the test on road with combined adhesion. (a): Graphical comparison of the braking distance during a test on a road with combined adhesion at speed of 100 km/h; (b): Graphical comparison of the braking time during a test on a road with combined adhesion at speed of 100 km/h; (c): Graphical comparison of the vehicle rotation in z-axis during a test on a road with combined adhesion at speed of 100 km/h; (d): Graphical comparison of the braking distance during a test on a road with combined adhesion at speed of 140 km/h; (e): Graphical comparison of the braking time during a test on a road with combined adhesion at speed of 140 km/h; (f): Graphical comparison of the vehicle rotation in z-axis during a test on a road with combined adhesion at speed of 140 km/h.
Figure 19.
Graphical comparison of the maneuverability test on road. (a): Graphical comparison of the braking distance during a manoeurability test on a dry road at speed of 100 km/h; (b): Graphical comparison of the braking time during a manoeurability test on a dry road at speed of 100 km/h; (c): Graphical comparison of the vehicle deviation from the prescribed road during a manoeurability test on a dry road at speed of 100 km/h; (d): Graphical comparison of the braking distance during a manoeurability test on a dry road at speed of 140 km/h; (e): Graphical comparison of the braking time during a manoeurability test on a dry road at speed of 140 km/h; (f): Graphical comparison of the vehicle deviation from the prescribed road during a manoeurability test on a dry road at speed of 140 km/h.
Figure 19.
Graphical comparison of the maneuverability test on road. (a): Graphical comparison of the braking distance during a manoeurability test on a dry road at speed of 100 km/h; (b): Graphical comparison of the braking time during a manoeurability test on a dry road at speed of 100 km/h; (c): Graphical comparison of the vehicle deviation from the prescribed road during a manoeurability test on a dry road at speed of 100 km/h; (d): Graphical comparison of the braking distance during a manoeurability test on a dry road at speed of 140 km/h; (e): Graphical comparison of the braking time during a manoeurability test on a dry road at speed of 140 km/h; (f): Graphical comparison of the vehicle deviation from the prescribed road during a manoeurability test on a dry road at speed of 140 km/h.
Table 1.
ABS controller logic.
Table 1.
ABS controller logic.
| Output Values | −1 | 0 | 1 |
|---|
| Slip | >0.2 | 0.05–0.2 | <0.05 |
| Vehicle speed (km/h) | >5 | >5 | >5 |
Table 2.
Table of rules for the fuzzy controller.
Table 2.
Table of rules for the fuzzy controller.
| Fuzzy Rules | Speed |
|---|
| VS | S | M | H | VH |
|---|
| Ws/Vs | VS | VN | VN | VN | VN | VN |
| S | N | N | N | N | VN |
| M | Z | Z | Z | Z | Z |
| H | P | P | P | P | P |
| VH | VP | VP | VP | VP | VP |
Table 3.
Test results on dry road at speed 100 km/h.
Table 3.
Test results on dry road at speed 100 km/h.
| Monitored Value | Without ABS | ABS | Fuzzy ABS |
|---|
| Braking time (s) | 6.53 | 6.73 | 6.35 |
| Braking distance (m) | 103.66 | 104.80 | 100.7 |
| Max. rotation in z-axis (deg.) | 0.124 | 0.088 | −0.067 |
Table 4.
Test results on dry road at speed 140 km/h.
Table 4.
Test results on dry road at speed 140 km/h.
| Monitored Value | Without ABS | ABS | Fuzzy ABS |
|---|
| Braking time (s) | 8.65 | 8.73 | 8.30 |
| Braking distance (m) | 185.04 | 182.83 | 177.08 |
| Max. rotation in z-axis (deg.) | −0.063 | −0.052 | −0.045 |
Table 5.
Test results on road with combined adhesion at speed 100 km/h.
Table 5.
Test results on road with combined adhesion at speed 100 km/h.
| Monitored Value | Without ABS | ABS | Fuzzy ABS |
|---|
| Braking time (s) | 10.5 | 9.73 | 9.6 |
| Braking distance (m) | 150.52 | 143.23 | 141.78 |
| Max. rotation in z-axis (deg.) | −873.24 | −3.21 | −2.14 |
Table 6.
Test results on road with combined adhesion at speed 140 km/h.
Table 6.
Test results on road with combined adhesion at speed 140 km/h.
| Monitored Value | Without ABS | ABS | Fuzzy ABS |
|---|
| Braking time (s) | 13.23 | 15.55 | 12.43 |
| Braking distance (m) | 272.21 | 263.83 | 247.56 |
| Max. rotation in z-axis (deg.) | −1372.30 | −141.29 | −2.83 |
Table 7.
Maneuverability test on dry road at speed 100 km/h.
Table 7.
Maneuverability test on dry road at speed 100 km/h.
| Monitored Value | Without ABS | ABS | Fuzzy ABS |
|---|
| Braking time (s) | 6.78 | 6.95 | 6.58 |
| Braking distance (m) | 105.10 | 107.52 | 103.03 |
| Max. deviation of the vehicle (m) | 3.76 | 0.2 | 0.01 |
Table 8.
Maneuverability test on dry road at speed 130 km/h.
Table 8.
Maneuverability test on dry road at speed 130 km/h.
| Monitored Value | Without ABS | ABS | Fuzzy ABS |
|---|
| Braking time (s) | 8.15 | 8.8 | 8.58 |
| Braking distance (m) | 162.93 | 172.66 | 172.43 |
| Max. deviation of the vehicle (m) | 3.52 | 0.34 | 0.19 |
Table 9.
Comparison of parameters when braking on dry road.
Table 10.
Comparison of parameters when braking on road with combined adhesion.
Table 11.
Comparison of parameters during avoiding an obstacle on the road.
Table 12.
Percentage comparison of the improvement of key indicators.
Table 12.
Percentage comparison of the improvement of key indicators.
| Monitored Value | Improvement of the Measured Parameter (%) |
|---|
| 100 km/h | 140 km/h
(130 km/h) |
|---|
| Test on dry road—Braking distance | 3.91 | 3.14 |
| Test on road with combined adhesion—Braking distance | 1.01 | 6.17 |
| Test on road with combined adhesion—Max. rotation in z-axis | 33.33 | 98.00 |
| Maneuverability test on dry road—Max. deviation of the vehicle | 95.00 | 44.12 |























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
 0.088
0.088 0.067
0.067 0.124
0.124