Solar+ Optimizer: A Model Predictive Control Optimization Platform for Grid Responsive Building Microgrids

 , , and
, , and 
Abstract
:
1. Introduction
2. Literature Review and Contribution
- An integrated software architecture that supports a vendor- and protocol-agnostic data acquisition and control framework that enables both local and/or cloud based controls. The architecture is extensible to other building types, equipment and DERs.
- A field demonstration of this software controlling HVAC, refrigeration and DER using MPC. The software is deployed in the local area network in a real-world small commercial building.
- A proof-of-concept demonstration of a building controller that is responsive to various grid signals (time varying energy costs) and that supports demand response events.
- A description of the implementation challenges experienced during deployment and operations, intended to accelerate the effort of future researchers and practitioners who could avoid these barriers that have been identified.
3. Controller Architecture and Components
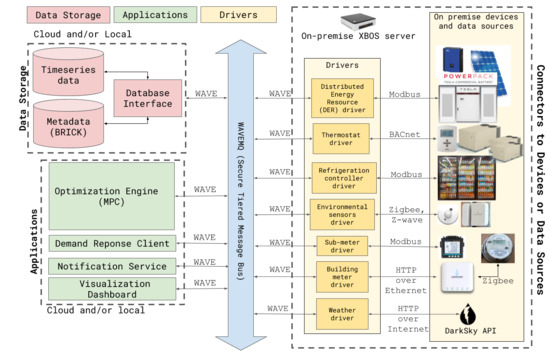
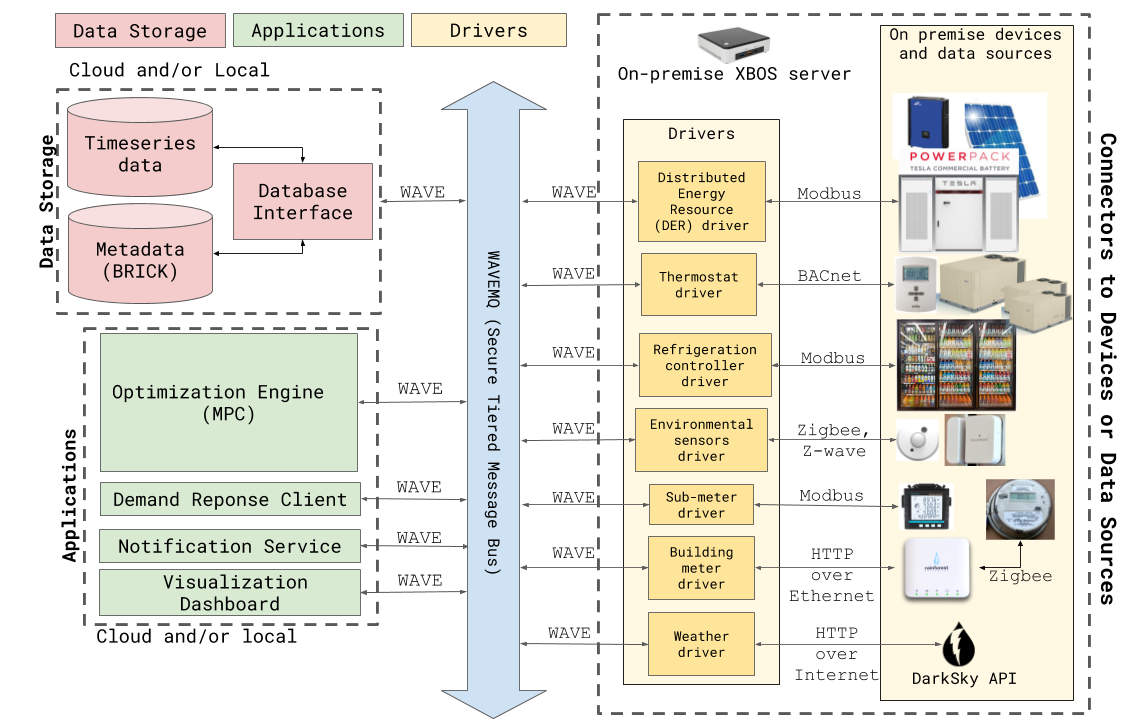
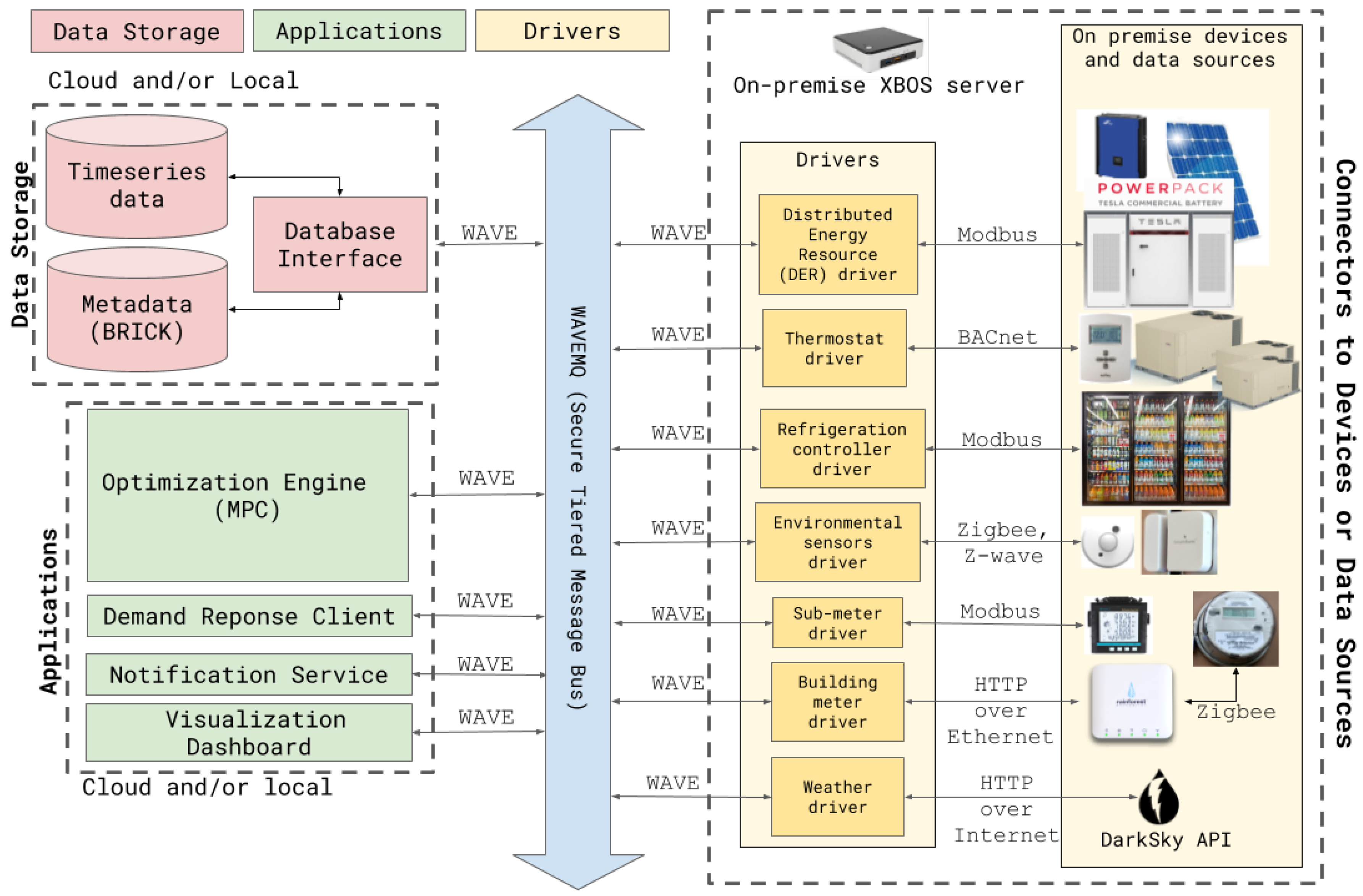
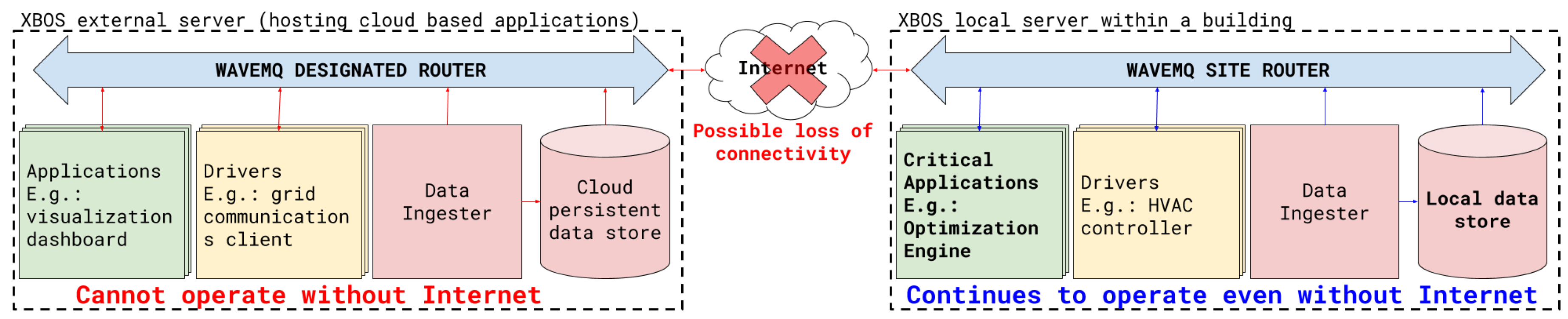
3.1. eXtensible Building Operating System (XBOS)
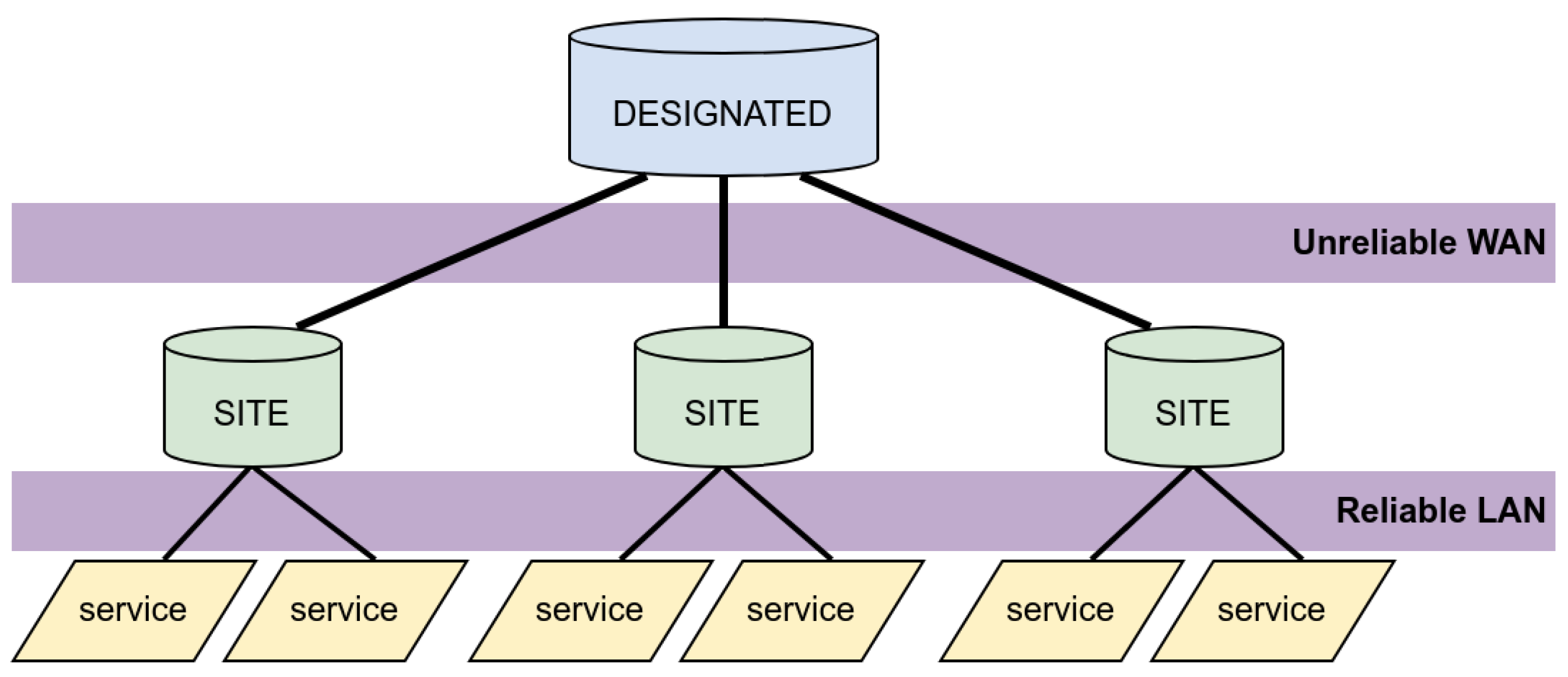
- WAVE and WAVEMQ: WAVE is an authentication engine that handles permissions and access control. WAVEMQ is a multi-tier publish-subscribe message bus that allows exchange of data and control signals.
- Drivers: Drivers are connectors to real devices and other data sources (e.g., web based services, emulated devices, etc.). A driver is responsible for gathering data from a device and for controlling the device in response to requests from an external controller. With the required permissions, a driver can publish and subscribe to messages on WAVEMQ.
- Data Storage: Both operational and configuration data are stored on dedicated databases. There are separate data stores for the building metadata represented using the Brick schema [66] and for the continuous real-time data that are being collected by the drivers.
- Applications: Developers can write applications on the XBOS platform using real-time data that is being published on the message bus (e.g., notification service and visualization dashboard) or using historical data that have been stored in the database (e.g., MPC based optimization engine and fault detection tools). Applications can publish control signals for the devices on WAVEMQ and can trigger a change in their mode of operation.
3.2. WAVE and WAVEMQ
3.3. Drivers
3.4. Data Storage
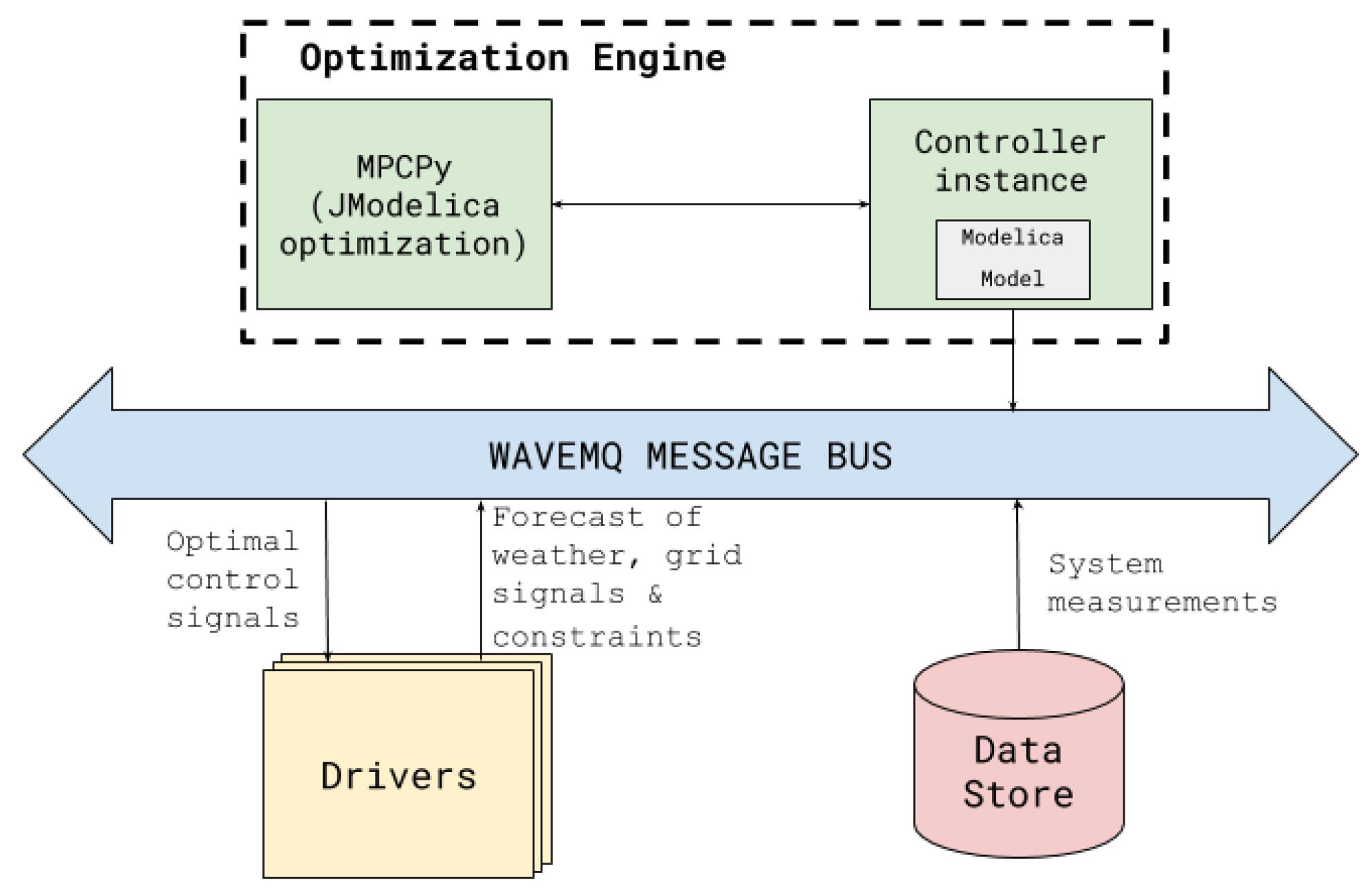
3.5. Applications: Optimization Engine
3.5.1. MPCPy
3.5.2. Model Formulation
3.5.3. Optimization Configuration for Grid Interactions
3.5.4. Supervisory Control Scheme
3.5.5. Weather Forecast
4. Evaluation
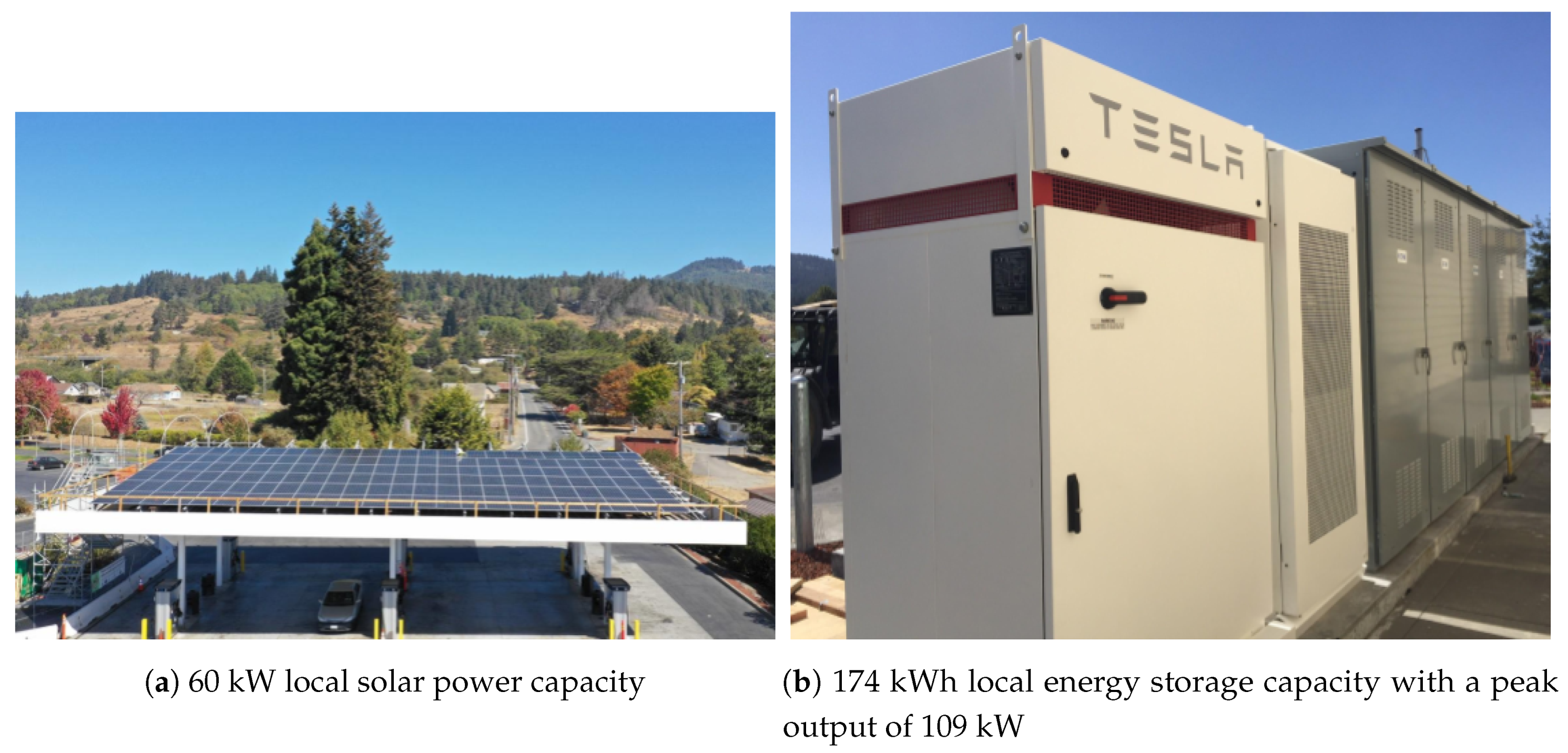
4.1. Site Description
4.2. Hardware and Software Set Up
- Electricity Meters: The building has six Continental Controls Wattnode power meters [89] that measure the power consumption of: whole building, west zone RTU compressor, east zone RTU compressor, refrigerator compressor, refrigerator evaporator fan and freezer compressor and evaporator fan, respectively. These devices measure instantaneous power parameters and communicate over Modbus serial.
- HVAC: The two RTUs are controlled by two separate KMC Flexstat 120063CEW [90] thermostats, which communicate over BACnet/IP. The preferred temperatures in the west and east zone are 20.56 and 21.67 C (or 69 and 71 F, respectively), respectively. The heating and cooling setpoints of the thermostats are controlled by the optimizer.
- Refrigeration: Sporlan Parker PSK214 Modbus (serial) [91] refrigeration controllers are used to control the large refrigeration systems. By default the freezer is set to an indoor temperature of −21.67 C (−7 F) and the refrigerator to 0.56 C (33 F). During the experiments, the SPO controlled the indoor cabinet temperature setpoint of the equipment.
- PV and Battery: The inverters of the PV panels and the battery are interfaced with a Schweitzer Engineering Laboratories SEL-3505 Real Time Automation Controller (RTAC) [92]. The RTAC is the short-timescale microgrid controller for this system and it handles power flows, circuit switching and safety aspects during the grid-islanded system operation. However, due to certain restrictions at this site, the RTAC only allows ’read’ operations (over Modbus(TCP)) to be performed by the SPO.
- Emulated Battery: As the Tesla battery on site only allows ’read’ operations, a software-based emulated battery is used for the experiments. This battery has been scaled down to a size that makes sense for conventional small and medium convenient stores (without power-hungry gaming machines, but HVAC and refrigeration). The emulated battery has a total capacity of 27 kWh, with a peak output of 14 kW (equivalent to two Tesla Powerwalls [93]).
- Weather: The current outdoor temperature, cloud cover, relative humidity and wind speed data, along with their 48-h forecasts, are collected from the DarkSky weather service’s REST API [94].
- Grid Signals: Provides information about the prices based on tariffs or dynamic prices and/or could also publish information about scheduled demand response events. While this is currently implemented as library function that retrieves the grid signals from a static database, retrieving the real-time or day-ahead Independent System Operator (ISO) prices or dynamic prices from a utility using protocols such as IEEE 2030.5 [95] or OpenADR [96] are planned future work.
4.3. Optimization Engine Set Up
4.3.1. Modeling
4.3.2. Controller Start-Up
4.4. Experiments
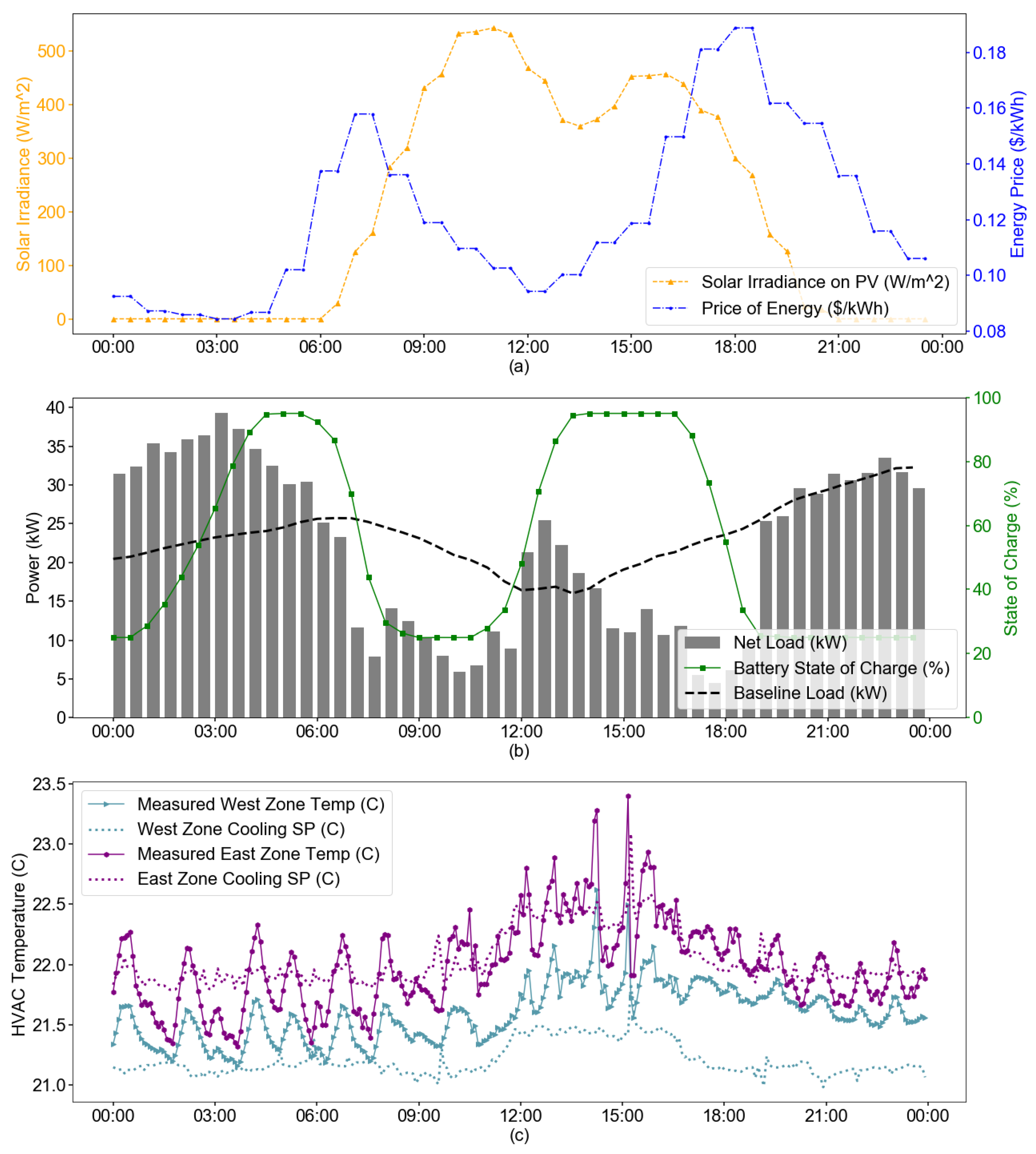
4.4.1. Dynamic Prices
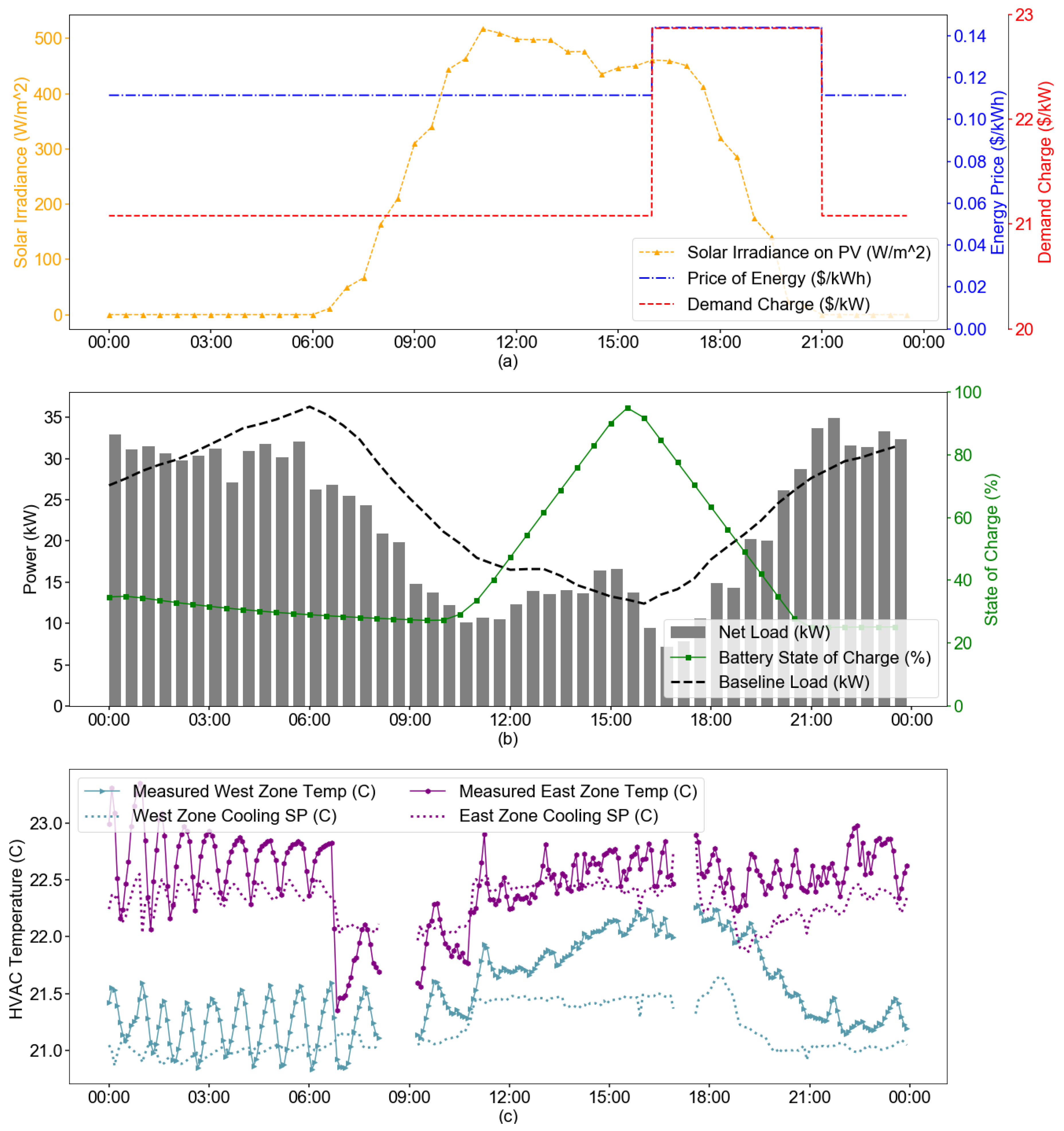
4.4.2. Time-Of-Use Prices
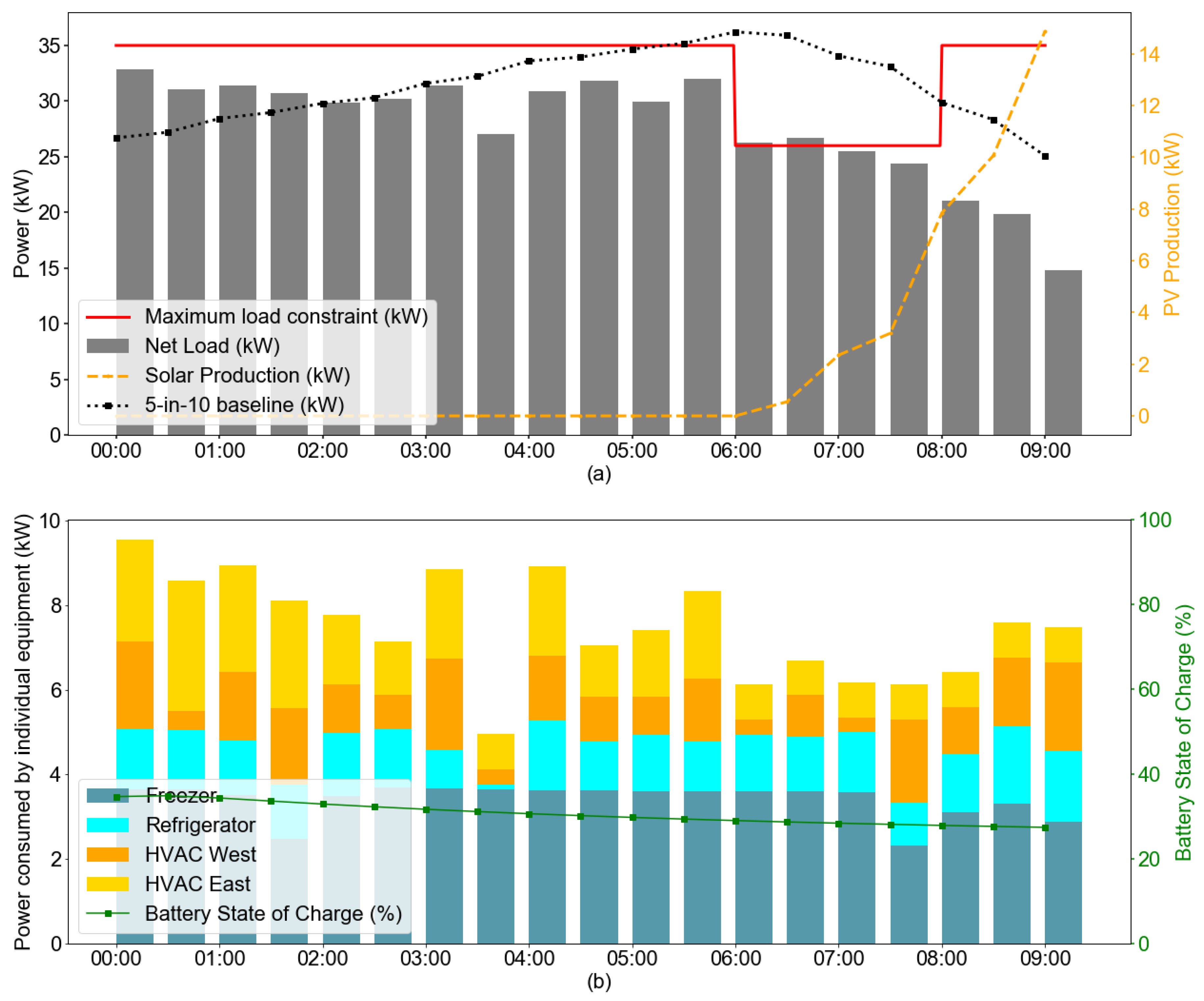
4.4.3. Demand Limiting Event
5. Discussion
5.1. Benefits to Developers
5.2. Challenges of the Real World Deployment
5.3. Limitations and Future Work
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Li, Z.; Guo, J. Wisdom about age [aging electricity infrastructure]. IEEE Power Energy Mag. 2006, 4, 44–51. [Google Scholar]
- Mariam, L.; Basu, M.; Conlon, M.F. Microgrid: Architecture, policy and future trends. Renew. Sustain. Energy Rev. 2016, 64, 477–489. [Google Scholar] [CrossRef]
- Hirsch, A.; Parag, Y.; Guerrero, J. Microgrids: A review of technologies, key drivers, and outstanding issues. Renew. Sustain. Energy Rev. 2018, 90, 402–411. [Google Scholar] [CrossRef]
- Yoldaş, Y.; Önen, A.; Muyeen, S.; Vasilakos, A.V.; Alan, İ. Enhancing smart grid with microgrids: Challenges and opportunities. Renew. Sustain. Energy Rev. 2017, 72, 205–214. [Google Scholar] [CrossRef]
- Parhizi, S.; Lotfi, H.; Khodaei, A.; Bahramirad, S. State of the art in research on microgrids: A review. IEEE Access 2015, 3, 890–925. [Google Scholar] [CrossRef]
- Bahramirad, S.; Khodaei, A.; Svachula, J.; Aguero, J.R. Building Resilient Integrated Grids: One neighborhood at a time. IEEE Electrif. Mag. 2015, 3, 48–55. [Google Scholar] [CrossRef]
- Tavakoli, M.; Shokridehaki, F.; Akorede, M.F.; Marzband, M.; Vechiu, I.; Pouresmaeil, E. CVaR-based energy management scheme for optimal resilience and operational cost in commercial building microgrids. Int. J. Electr. Power Energy Syst. 2018, 100, 1–9. [Google Scholar] [CrossRef]
- Lizana, J.; Chacartegui, R.; Barrios-Padura, A.; Valverde, J.M. Advances in thermal energy storage materials and their applications towards zero energy buildings: A critical review. Appl. Energy 2017, 203, 219–239. [Google Scholar] [CrossRef]
- Eaton. Microgrid and Distributed Energy Resources. Available online: https://www.eaton.com/us/en-us/catalog/services/microgrid-and-distributed-energy-resources.html (accessed on 14 May 2020).
- Company, S.E. Don’t Panic. Make Your Complex Microgrid Easy with S&C. Available online: https://www.sandc.com/en/solutions/microgrids/ (accessed on 14 May 2020).
- Electric, S. Microgrid Solutions. Available online: https://www.se.com/us/en/work/solutions/microgrids/ (accessed on 14 May 2020).
- Reynolds, J.; Rezgui, Y.; Hippolyte, J.L. Upscaling energy control from building to districts: Current limitations and future perspectives. Sustain. Cities Soc. 2017, 35, 816–829. [Google Scholar] [CrossRef]
- EIA. Annual Energy Outlook 2019: Commercial Sector Key Indicators and Consumption Reference Case. Available online: https://www.eia.gov/outlooks/aeo/data/browser/#/?id=5-AEO2019&sourcekey=0. (accessed on 7 May 2020).
- Hydeman, M.; Taylor, S.T.; Eubanks, B. Control sequences & controller programming. ASHRAE J. 2015, 57, 58–62. [Google Scholar]
- Joos, G.; Reilly, J.; Bower, W.; Neal, R. The need for standardization: The benefits to the core functions of the microgrid control system. IEEE Power Energy Mag. 2017, 15, 32–40. [Google Scholar] [CrossRef]
- Henze, G.P. Model predictive control for buildings: A quantum leap? J. Build. Perform. Simul. 2013, 6, 157–158. [Google Scholar] [CrossRef] [Green Version]
- Henze, G.P.; Kalz, D.E.; Liu, S.; Felsmann, C. Experimental Analysis of Model-Based Predictive Optimal Control for Active and Passive Building Thermal Storage Inventory. HVAC R Res. 2005, 11, 189–213. [Google Scholar] [CrossRef]
- Henze, G.P.; Felsmann, C.; Knabe, G. Evaluation of optimal control for active and passive building thermal storage. Int. J. Therm. Sci. 2004, 43, 173–183. [Google Scholar] [CrossRef]
- Nabil Nassif, S.K.; Sabourin, R. Optimization of HVAC Control System Strategy Using Two-Objective Genetic Algorithm. HVAC R Res. 2005, 11, 459–486. [Google Scholar] [CrossRef] [Green Version]
- Nassif, N.; Kajl, S.; Sabourin, R. Simplified Model-based Optimal Control of VAV Air-conditioning System. In Proceedings of the Ninth International IBPSA Conference, Montreal, QC, Canada, 15–18 August 2005; pp. 823–830. [Google Scholar]
- Wang, S.; Jin, X. Model-based optimal control of VAV air-conditioning system using genetic algorithm. Build. Environ. 2000, 35, 471–487. [Google Scholar] [CrossRef]
- May-Ostendorp, P.; Henze, G.P.; Corbin, C.D.; Rajagopalan, B.; Felsmann, C. Model-predictive control of mixed-mode buildings with rule extraction. Build. Environ. 2011, 46, 428–437. [Google Scholar] [CrossRef]
- Corbin, C.D.; Henze, G.P.; May-Ostendorp, P. A model predictive control optimization environment for real-time commercial building application. J. Build. Perform. Simul. 2013, 6, 159–174. [Google Scholar] [CrossRef]
- Lee, Y.M.; Horesh, R.; Liberti, L. Optimal HVAC Control as Demand Response with On-site Energy Storage and Generation System. Energy Procedia 2015, 78, 2106–2111. [Google Scholar] [CrossRef] [Green Version]
- Biyik, E.; Kahraman, A. A predictive control strategy for optimal management of peak load, thermal comfort, energy storage and renewables in multi-zone buildings. J. Build. Eng. 2019, 25, 100826. [Google Scholar] [CrossRef]
- Marušić, D.; Lešić, V.; Capuder, T.; Vasak, M. Price-Optimal Energy Flow Control of a Building Microgrid Connected to a Smart Grid. In Proceedings of the 2018 26th Mediterranean Conference on Control and Automation (MED), Zadar, Croatia, 19–22 June 2018; pp. 1–9. [Google Scholar]
- Xue, Y.; Todd, M.; Ula, S.; Barth, M.J.; Martinez-Morales, A.A. A comparison between two MPC algorithms for demand charge reduction in a real-world microgrid system. In Proceedings of the 2016 IEEE 43rd Photovoltaic Specialists Conference (PVSC), Portland, OR, USA, 5–10 June 2016; pp. 1875–1880. [Google Scholar]
- Tavakoli, M.; Shokridehaki, F.; Marzband, M.; Godina, R.; Pouresmaeil, E. A two stage hierarchical control approach for the optimal energy management in commercial building microgrids based on local wind power and PEVs. Sustain. Cities Soc. 2018, 41, 332–340. [Google Scholar] [CrossRef]
- Reynolds, J.; Rezgui, Y.; Kwan, A.; Piriou, S. A zone-level, building energy optimisation combining an artificial neural network, a genetic algorithm, and model predictive control. Energy 2018, 151, 729–739. [Google Scholar] [CrossRef]
- Magnier, L.; Haghighat, F. Multiobjective optimization of building design using TRNSYS simulations, genetic algorithm, and Artificial Neural Network. Build. Environ. 2010, 45, 739–746. [Google Scholar] [CrossRef]
- Bonthu, R.K.; Pham, H.; Aguilera, R.P.; Ha, Q.P. Minimization of building energy cost by optimally managing PV and battery energy storage systems. In Proceedings of the 2017 20th International Conference on Electrical Machines and Systems (ICEMS), Sydney, NSW, Australia, 11–14 August 2017; pp. 1–6. [Google Scholar]
- Wang, Z.; Yang, R.; Wang, L. Intelligent multi-agent control for integrated building and micro-grid systems. In Proceedings of the ISGT 2011, Anaheim, CA, USA, 17–19 January 2011; pp. 1–7. [Google Scholar]
- Benjamin Heymann, J. Frédéric Bonnans, P.M.F.J.S.F.L.; Jiménez-Estévez, G. Continuous optimal control approaches to microgrid energy management. Energy Syst. 2018, 9, 59–77. [Google Scholar] [CrossRef] [Green Version]
- Macarulla, M.; Casals, M.; Forcada, N.; Gangolells, M. Implementation of predictive control in a commercial building energy management system using neural networks. Energy Build. 2017, 151, 511–519. [Google Scholar] [CrossRef] [Green Version]
- Vázquez-Canteli, J.R.; Nagy, Z. Reinforcement learning for demand response: A review of algorithms and modeling techniques. Appl. Energy 2019, 235, 1072–1089. [Google Scholar] [CrossRef]
- Jia, R.; Jin, M.; Sun, K.; Hong, T.; Spanos, C. Advanced Building Control via Deep Reinforcement Learning. Energy Procedia 2019, 158, 6158–6163. [Google Scholar] [CrossRef]
- Wang, Y.; Velswamy, K.; Huang, B. A Long-Short Term Memory Recurrent Neural Network Based Reinforcement Learning Controller for Office Heating Ventilation and Air Conditioning Systems. Processes 2017, 5, 46. [Google Scholar] [CrossRef] [Green Version]
- Wei, T.; Wang, Y.; Zhu, Q. Deep reinforcement learning for building HVAC control. In Proceedings of the 2017 54th ACM/EDAC/IEEE Design Automation Conference (DAC), Austin, TX, USA, 18–22 June 2017; pp. 1–6. [Google Scholar]
- Zhang, Z.; Chong, A.; Pan, Y.; Zhang, C.; Lu, S.; Lam, K. A Deep Reinforcement Learning Approach to Using Whole Building Energy Model For HVAC Optimal Control. In Proceedings of the 2018 ASHRAE/IBPSA-USA Building Performance Analysis Conference and SimBuild, Chicago, IL, USA, 26–28 September 2018. [Google Scholar]
- Ahn, K.U.; Park, C.S. Application of deep Q-networks for model-free optimal control balancing between different HVAC systems. Sci. Technol. Built Environ. 2020, 26, 61–74. [Google Scholar] [CrossRef]
- Wetter, M. Co-simulation of building energy and control systems with the Building Controls Virtual Test Bed. J. Build. Perform. Simul. 2011, 4, 185–203. [Google Scholar] [CrossRef] [Green Version]
- West, S.R.; Ward, J.K.; Wall, J. Trial results from a model predictive control and optimisation system for commercial building HVAC. Energy Build. 2014, 72, 271–279. [Google Scholar] [CrossRef]
- Bengea, S.C.; Kelman, A.D.; Borrelli, F.; Taylor, R.; Narayanan, S. Implementation of model predictive control for an HVAC system in a mid-size commercial building. HVAC R Res. 2014, 20, 121–135. [Google Scholar] [CrossRef]
- Kim, D.; Braun, J.; Cai, J.; Fugate, D. Development and experimental demonstration of a plug-and-play multiple RTU coordination control algorithm for small/medium commercial buildings. Energy Build. 2015, 107, 279–293. [Google Scholar] [CrossRef] [Green Version]
- Kim, D.; Braun, J.E. Development, implementation and performance of a model predictive controller for packaged air conditioners in small and medium-sized commercial building applications. Energy Build. 2018, 178, 49–60. [Google Scholar] [CrossRef]
- Carli, R.; Cavone, G.; Ben Othman, S.; Dotoli, M. IoT Based Architecture for Model Predictive Control of HVAC Systems in Smart Buildings. Sensors 2020, 20, 781. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Vrettos, E.; Kara, E.C.; MacDonald, J.; Andersson, G.; Callaway, D.S. Experimental Demonstration of Frequency Regulation by Commercial Buildings—Part I: Modeling and Hierarchical Control Design. IEEE Trans. Smart Grid 2018, 9, 3213–3223. [Google Scholar] [CrossRef] [Green Version]
- Vrettos, E.; Kara, E.C.; MacDonald, J.; Andersson, G.; Callaway, D.S. Experimental Demonstration of Frequency Regulation by Commercial Buildings—Part II: Results and Performance Evaluation. IEEE Trans. Smart Grid 2018, 9, 3224–3234. [Google Scholar] [CrossRef] [Green Version]
- Bruno, S.; Giannoccaro, G.; La Scala, M. A Demand Response Implementation in Tertiary Buildings Through Model Predictive Control. IEEE Trans. Ind. Appl. 2019, 55, 7052–7061. [Google Scholar] [CrossRef]
- FLEXlab. Advanced Integrated Building & Grid Technologies Testbed. Available online: https://flexlab.lbl.gov/ (accessed on 4 May 2020).
- Chen, B.; Cai, Z.; Bergés, M. Gnu-RL: A Precocial Reinforcement Learning Solution for Building HVAC Control Using a Differentiable MPC Policy. In Proceedings of the 6th ACM International Conference on Systems for Energy-Efficient Buildings Cities, and Transportation, New York, NY, USA, 13–14 November 2019; Association for Computing Machinery: New York, NY, USA, 2019; pp. 316–325. [Google Scholar] [CrossRef]
- Zhang, Z.; Lam, K.P. Practical Implementation and Evaluation of Deep Reinforcement Learning Control for a Radiant Heating System. In Proceedings of the 5th Conference on Systems for Built Environments, Shenzhen, China, 7–8 November 2018; Association for Computing Machinery: New York, NY, USA, 2018; pp. 148–157. [Google Scholar] [CrossRef]
- Brundu, F.G.; Patti, E.; Osello, A.; Giudice, M.D.; Rapetti, N.; Krylovskiy, A.; Jahn, M.; Verda, V.; Guelpa, E.; Rietto, L.; et al. IoT Software Infrastructure for Energy Management and Simulation in Smart Cities. IEEE Trans. Ind. Inform. 2017, 13, 832–840. [Google Scholar] [CrossRef]
- Fagiani, M.; Severini, M.; Valenti, M.; Ferracuti, F.; Ciabattoni, L.; Squartini, S. rEMpy: A comprehensive software framework for residential energy management. Energy Build. 2018, 171, 131–143. [Google Scholar] [CrossRef]
- Bottaccioli, L.; Aliberti, A.; Ugliotti, F.; Patti, E.; Osello, A.; Macii, E.; Acquaviva, A. Building Energy Modelling and Monitoring by Integration of IoT Devices and Building Information Models. In Proceedings of the 2017 IEEE 41st Annual Computer Software and Applications Conference (COMPSAC), Turin, Italy, 4–8 July 2017; Volume 1, pp. 914–922. [Google Scholar]
- Berbakov, L.; Batić, M.; Tomašević, N. Smart Energy Manager for Energy Efficient Buildings. In Proceedings of the IEEE EUROCON 2019—18th International Conference on Smart Technologies, Novi Sad, Serbia, Serbia, 1–4 July 2019; pp. 1–4. [Google Scholar]
- Akyol, B.A.; Haack, J.; Ciraci, S.; Carpenter, B.; Vlachopoulou, M.; Tews, C. VOLTTRON: An Agent Execution Platform for the Electric Power System. In Proceedings of the Third International Workshop on Agent Technologies for Energy Systems (ATES 2012), Valencia, Spain, 5 June 2012. [Google Scholar]
- Evins, R.; David, N. Using Simple Predictive Models to Improve Control of Complex Building Systems. In Proceedings of the 4th ACM International Conference on Systems for Energy-Efficient Built Environments, Delft, The Netherlands, 8–9 November 2017; Association for Computing Machinery: New York, NY, USA, 2017. [Google Scholar] [CrossRef]
- Mirakhorli, A.; Dong, B. An Open Source Smart Building Energy Management Platform through VOLTTRON. In Proceedings of the 2017 International Building Performance and Simulation Association Conference, San Francisco, CA, USA, 7–9 August 2017. [Google Scholar]
- Hao, H.; Liu, G.; Huang, S.; Katipamula, S. Coordination and Control of Flexible Building Loads for Renewable Integration; Demonstrations using VOLTTRON; U.S. Department of Energy Office of Scientific and Technical Information: Oak Ridge, TN, USA, 2016. [CrossRef] [Green Version]
- Luo, J.; Pourbabak, H.; Su, W. The application of distributed control algorithms using VOLTTRON-based software platform. In Proceedings of the 2017 8th International Renewable Energy Congress (IREC), Amman, Jordan, 21–23 March 2017; pp. 1–6. [Google Scholar]
- Raker, D.; Sellers, A.; Kini, R.; Green, M.; Stuart, T.; Ellingson, R.; Khanna, R.; Heben, M. Grid Integration of Building Systems and 1 MW Photovoltaic Array using VOLTTRON. In Proceedings of the 2017 IEEE 44th Photovoltaic Specialist Conference (PVSC), Washington, DC, USA, 25–30 June 2017; pp. 2926–2930. [Google Scholar]
- Raker, D.; Kini, R.; Huntsman, R.; Green, M.; Sapci, O.; Stuart, T.; Ellingson, R.; Khanna, R.; Heben, M. Transactive Mitigation Of Variability In The Output Of 1 MW Photovoltaic Array Using VolttronTM. In Proceedings of the 2018 IEEE 7th World Conference on Photovoltaic Energy Conversion (WCPEC) (A Joint Conference of 45th IEEE PVSC, 28th PVSEC 34th EU PVSEC), Waikoloa Village, HI, USA, 10–15 June 2018; pp. 1462–1467. [Google Scholar]
- For the Advancement of Structured Information Standards (OASIS), T.O. MQTT. Available online: http://mqtt.org/ (accessed on 14 May 2020).
- Fierro, G. XBOS Overview. Available online: https://docs.xbos.io (accessed on 6 May 2020).
- Balaji, B.; Bhattacharya, A.; Fierro, G.; Gao, J.; Gluck, J.; Hong, D.; Johansen, A.; Koh, J.; Ploennigs, J.; Agarwal, Y.; et al. Brick: Towards a Unified Metadata Schema For Buildings. In Proceedings of the 3rd ACM International Conference on Systems for Energy-Efficient Built Environments, Stanford, CA, USA, 15–17 November 2016; Association for Computing Machinery: New York, NY, USA, 2016; pp. 41–50. [Google Scholar] [CrossRef] [Green Version]
- Andersen, M.P.; Kumar, S.; AbdelBaky, M.; Fierro, G.; Kolb, J.; Kim, H.S.; Culler, D.E.; Popa, R.A. WAVE: A Decentralized Authorization Framework with Transitive Delegation. In Proceedings of the 28th USENIX Security Symposium (USENIX Security 19), Santa Clara, CA, United States, 14–16 August 2019; Association: Santa Clara, CA, USA, 2019; pp. 1375–1392. [Google Scholar]
- Andersen, M.P. WAVEMQ—Tiered message bus for WAVE 3. Available online: https://github.com/immesys/wavemq (accessed on 6 May 2020).
- Developers, G. Protocol Buffers. Available online: https://developers.google.com/protocol-buffers (accessed on 7 May 2020).
- gRPC Authors 2020. gRPC: A High-Performance, Open Source Universal RPC Framework. Available online: https://grpc.io (accessed on 7 May 2020).
- Organization T.M. Modbus. Available online: http://www.modbus.org/specs.php (accessed on 14 May 2020).
- American Society of Heating, R.; (ASHRAE), A.C.E. BACnet. Available online: http://www.bacnet.org/ (accessed on 14 May 2020).
- Blum, D.H.; Wetter, M. MPCPy: An Open-Source Software Platform for Model Predictive Control in Buildings. In Proceedings of the 15th Conference of International Building Performance Simulation, San Francisco, CA, USA, 7–9 August 2017. [Google Scholar]
- Mattsson, S.E.; Elmqvist, H. Modelica—An international effort to design the next generation modeling language. In Proceedings of the 7th IFAC Symposium on Computer Aided Control Systems Design, Gent, Belgium, 28–30 April 1997. [Google Scholar]
- Åkesson, J.; Gäfvert, M.; Tummescheit, H. JModelica—An Open Source Platform for Optimization of Modelica Models. In Proceedings of the 6th Vienna International Conference on Mathematical Modelling, Vienna, Austria, 11–13 February 2009. [Google Scholar]
- Andersson, J.; Åkesson, J.R.; Diehl, M. CasADi: A Symbolic Package for Automatic Differentiation and Optimal Control. Recent Adv. Algorithm. Differ. 2012, 87, 297–307. [Google Scholar]
- Wächter, A.; Biegler, L.T. On the Implementation of a Primal-Dual Interior Point Filter Line Search Algorithm for Large-Scale Nonlinear Programming. Math. Program. 2006, 106, 25–57. [Google Scholar] [CrossRef]
- Gas, P.; Company, E. Find out if Peak Day Pricing Is Right for Your Business. Available online: https://www.pge.com/en_US/small-medium-business/your-account/rates-and-rate-options/peak-day-pricing.page. (accessed on 15 May 2020).
- Edison, S.C. Get to Know Critical Peak Pricing (CPP). Available online: www.sce.com/business/rates/cpp (accessed on 18 May 2020).
- International, P.G. SMUD Sees Early Success with Dynamic Pricing Pilot. Available online: https://www.power-grid.com/2013/07/10/smud-sees-early-success-with-dynamic-pricing-pilot/ (accessed on 15 May 2020).
- Fund, E.D. The Costs and Benefits of Real-Time Pricing. Available online: https://citizensutilityboard.org/wp-content/uploads/2017/11/FinalRealTimePricingWhitepaper.pdf (accessed on 15 May 2020).
- Zhang, Q.; Huang, J.; Lang, S. Development of typical year weather files for Chinese locations. ASHRAE Trans. 2002, 108, 1063–1086. [Google Scholar]
- Perez, R.; Ineichen, P.; Seals, R.; Michalsky, J.; Stewart, R. Modeling daylight availability and irradiance components from direct and global irradiance. Sol. Energy 1990, 44, 271–289. [Google Scholar] [CrossRef] [Green Version]
- Authority, R.C.E. RCEA Community Choice Energy Program: Commercial, Industrial & Agricultural Generation Rates. Available online: https://redwoodenergy.org/wp-content/uploads/2020/03/March-2020-Com-Rates-for-Website.pdf (accessed on 16 May 2020).
- Gas, P.; Company, E. ELECTRIC SCHEDULE B-19. Available online: https://www.pge.com/tariffs/assets/pdf/tariffbook/ELEC_SCHEDS_B-19.pdf (accessed on 16 May 2020).
- Office of Energy Efficiency & Renewable Energy. Confronting the Duck Curve: How to Address Over-Generation of Solar Energy. Available online: https://www.energy.gov/eere/articles/confronting-duck-curve-how-address-over-generation-solar-energy. (accessed on 16 May 2020).
- Intel. Intel NUC. Available online: https://www.intel.com/content/www/us/en/products/boards-kits/nuc.html (accessed on 14 May 2020).
- InfluxData. InfluxDB. Available online: https://www.influxdata.com/ (accessed on 15 May 2020).
- Systems, C.C. Wattnode Modbus. Available online: https://ctlsys.com/product/wattnode-modbus/ (accessed on 14 May 2020).
- Controls, K. BAC-120063CEW. Available online: https://www.kmccontrols.com/product/bac-120063cew/ (accessed on 14 May 2020).
- Corporation, P.H. Sporlan Electronic Refrigeration Controllers: PSK214N9EXBS. Available online: https://ph.parker.com/us/en/sporlan-electronic-refrigeration-controllers/psk214n9exbs (accessed on 16 May 2020).
- Laboratories, S.E. SEL-3505/3505-3: Real-Time Automation Controller (RTAC). Available online: https://selinc.com/products/3505/ (accessed on 14 May 2020).
- Tesla. Meet Powerwall, Your Home Battery. Available online: https://www.tesla.com/powerwall (accessed on 16 May 2020).
- Company, T.D.S. Dark Sky API. Available online: https://darksky.net/dev (accessed on 14 May 2020).
- Association, I.S. 2030.5-2018-IEEE Standard for Smart Energy Profile Application Protocol. Available online: https://standards.ieee.org/standard/2030_5-2018.html (accessed on 16 May 2020).
- Alliance, O. OpenADR. Available online: https://www.openadr.org/ (accessed on 14 May 2020).
- Reniersa, J.M.; Mulder, G.; Ober-Blöbaum, S.; Howey, D.A. Improving optimal control of grid-connected lithium-ion batteries through more accurate battery and degradation modelling. J. Power Sources 2018, 379, 91–102. [Google Scholar] [CrossRef] [Green Version]
- Kiliccote, S.; Piette, M.A.; Hansen, D. Advanced Controls and Communications for Demand Response and Energy Efficiency in Commercial Buildings. In Proceedings of the Second Carnegie Mellon Conference in Electric Power Systems: Monitoring, Sensing, Software and Its Valuation for the Changing Electric Power Industry, Pittsburgh, PA, USA, 11–12 January 2006. [Google Scholar]
- Pipattanasomporn, M.; Kuzlu, M.; Khamphanchai, W.; Saha, A.; Rathinavel, K.; Rahman, S. BEMOSS: An agent platform to facilitate grid-interactive building operation with IoT devices. In Proceedings of the 2015 IEEE Innovative Smart Grid Technologies-Asia (ISGT ASIA), Bangkok, Thailand, 3–6 November 2015; pp. 1–6. [Google Scholar]
- Consortium, B. Brick: A Uniform Metadata Schema for Buildings. Available online: https://brickschema.org/ (accessed on 15 May 2020).











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Mode | Objective | Information in the Signal | Constraints |
|---|---|---|---|
| Price based | Minimize cost of energy and/or power | Energy price and/or demand charges, estimated peak power | None |
| Demand limiting | Minimize cost of energy and/or power | Energy price and/or demand charges, estimated peak power, maximum power | |
| Load shedding | Minimize cost of energy and/or power | Energy price and/or demand charges, estimated peak power, baseline power , , start time, final time | for [] |
| Load shifting | Minimize cost of energy and/or power | Energy price and/or demand charges, estimated peak power, baseline power , , , start increase time, final increase time, start decrease time, final decrease time | for [] and for [] |
| Load tracking | Minimize error against reference power profile | Reference power profile |
| Source | Protocol | Variables |
|---|---|---|
| Wattnode Meter | Modbus (serial) | active power (W) |
| KMC Thermostat | BACnet/IP | indoor temperature ( C) |
| Refrigeration Controller | Modbus (serial) | cabinet temperature ( C) |
| RTAC | Modbus (TCP) | PV production (W) battery charge/discharge rate (W) battery state of charge (%) |
| Battery (emulated) | - | battery charge/discharge rate (W) battery State of Charge (%) |
| Dark Sky API | HTTP | outdoor temperature ( C) cloud cover (%) relative humidity (%) wind speed (mph) and 48-hour forecasts of these |
| Grid Signals (tariffs, dynamic prices, Demand response events) | - | price of energy ($/kWh) demand charge ($/kW) amount of load limit/shed/shift (W) |
| Controller | Protocol | Control Variables | Default | Lower Limit | Upper Limit |
|---|---|---|---|---|---|
| Thermostat East | BACnet/IP | heating setpoint cooling setpoint | 19.44 C 21.67 C | 17.22 C 19.44 C | 22.22 C 23.33 C |
| Thermostat West | BACnet/IP | heating setpoint cooling setpoint | 18.33 C 20.56 C | 17.22 C 19.44 C | 22.22 C 23.33 C |
| Freezer | Modbus (serial) | cabinet temp. setpoint | −21.67 C | −34.44 C | −18.89 C |
| Refrigerator | Modbus (serial) | cabinet temp. setpoint | 0.56 C | 0.56 C | 3.33 C |
| Battery (emulated) | - | charge/discharge rate | 0W | −14 kW | 14 kW |
| Costs | SPO Optimized Load | Baseline Load |
|---|---|---|
| Energy Cost Demand Cost | $61.42 $793.86 | $68.63 $814.99 |
| Total Cost | $855.28 | $883.62 |
| # | Category | Description of Challenge |
|---|---|---|
| 1 | Technical | Limited choice of secure connected devices with local communication interfaces |
| 2 | Technical | Uncertain service and support for connected products, web services and underlying libraries (e.g., discontinued services, APIs changes). |
| 3 | Technical | Complex interaction of advanced supervisory control with local control in each connected device (e.g., thermostat hysteresis and defrost control). |
| 4 | Technical | Overconstrained systems (e.g., undersized refrigerator with tight temperature control bands) |
| 5 | Technical | Faulty equipment and sensors that make modeling harder due to unexpected behavior and incorrect representation of the system state |
| 6 | Technical | Unmodeled and unmeasured effects in the systems (e.g., unknown occupancy, door opening, internal gains due to uncontrolled equipment) |
| 7 | Organizational | Conflicting objectives and different risk tolerance between occupants/managers and researchers (e.g., thermal comfort, refrigerator temperature swings) |
| 8 | Organizational | Strict site/organization procedures and requirements (e.g., cybersecurity procedures) |
| 9 | Logistic | Delays in equipment deliveries (e.g., components in high demand) |
| 10 | Logistic | Faulty new equipment that needs to be replaced |
| 11 | Regulatory | Long lead times to work with highly-regulated, risk-adverse entities (e.g., utilities to sign off on the interconnect agreement, receiving approval before battery and PV commissioning) |
| 12 | Exceptional | Unfortunate and unforeseen natural disasters (e.g., power shutoffs due to threats of wildfires, COVID-19 pandemic) |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Krishnan Prakash, A.; Zhang, K.; Gupta, P.; Blum, D.; Marshall, M.; Fierro, G.; Alstone, P.; Zoellick, J.; Brown, R.; Pritoni, M. Solar+ Optimizer: A Model Predictive Control Optimization Platform for Grid Responsive Building Microgrids. Energies 2020, 13, 3093. https://doi.org/10.3390/en13123093
Krishnan Prakash A, Zhang K, Gupta P, Blum D, Marshall M, Fierro G, Alstone P, Zoellick J, Brown R, Pritoni M. Solar+ Optimizer: A Model Predictive Control Optimization Platform for Grid Responsive Building Microgrids. Energies. 2020; 13(12):3093. https://doi.org/10.3390/en13123093
Chicago/Turabian StyleKrishnan Prakash, Anand, Kun Zhang, Pranav Gupta, David Blum, Marc Marshall, Gabe Fierro, Peter Alstone, James Zoellick, Richard Brown, and Marco Pritoni. 2020. "Solar+ Optimizer: A Model Predictive Control Optimization Platform for Grid Responsive Building Microgrids" Energies 13, no. 12: 3093. https://doi.org/10.3390/en13123093
APA StyleKrishnan Prakash, A., Zhang, K., Gupta, P., Blum, D., Marshall, M., Fierro, G., Alstone, P., Zoellick, J., Brown, R., & Pritoni, M. (2020). Solar+ Optimizer: A Model Predictive Control Optimization Platform for Grid Responsive Building Microgrids. Energies, 13(12), 3093. https://doi.org/10.3390/en13123093