An Improved SOM-Based Method for Multi-Robot Task Assignment and Cooperative Search in Unknown Dynamic Environments

Abstract
:1. Introduction
2. Problem Statement
3. Traditional SOM and Motion Model of DWA
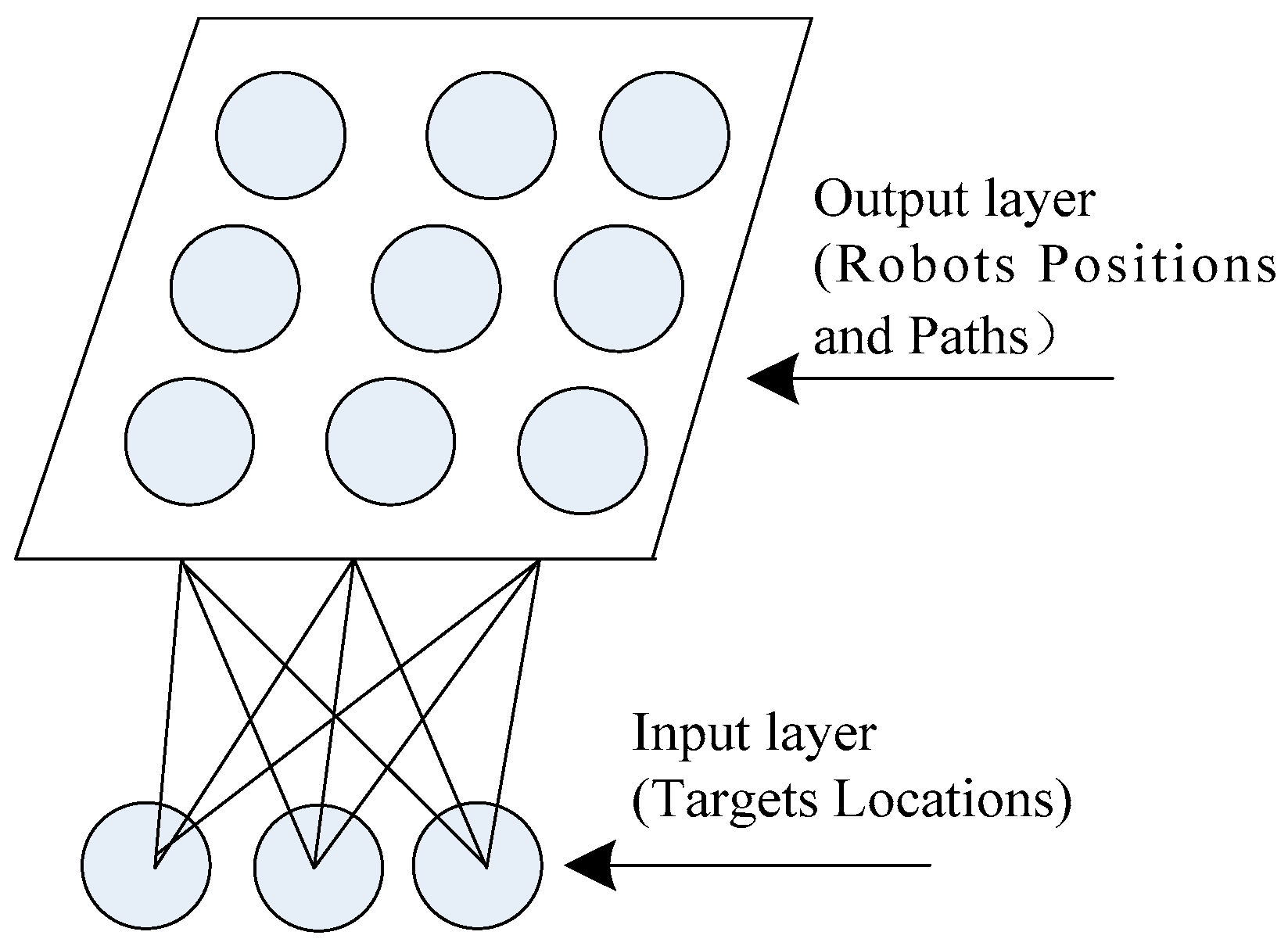
3.1. SOM Structure of Multi-Robot System
3.2. Traditional SOM for Task Assignment and Path Planning
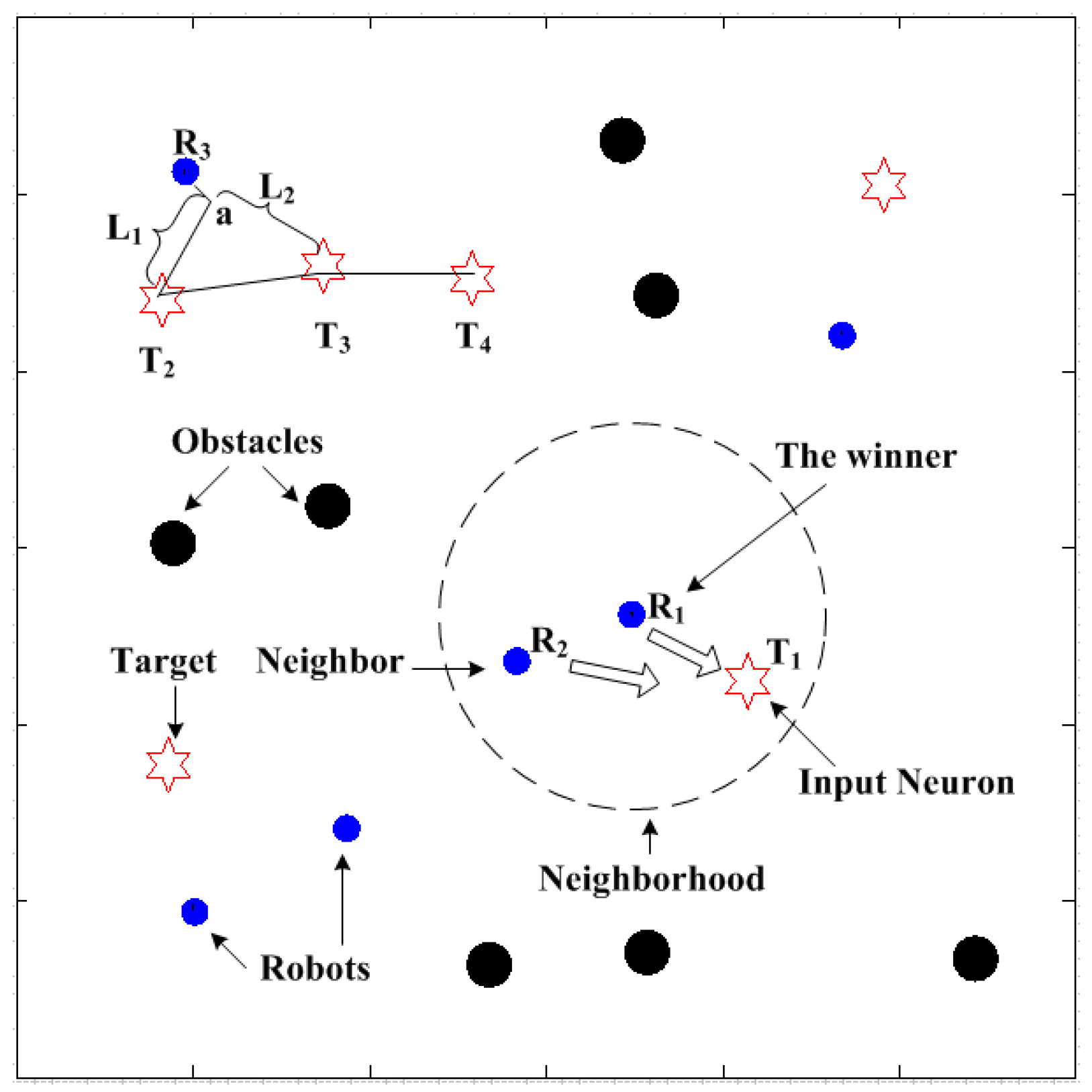
3.2.1. Winner Selection Rules
3.2.2. Definition of the Neighborhood Function
3.2.3. Weights Updating Rule
3.3. Motion Model of DWA
4. Proposed Method of DSOM
4.1. Adaptive DWA
4.2. DSOM for Task Assignment and Cooperative Search
4.2.1. The Proposed Locking Mechanism
4.2.2. New Neighborhood Function
4.2.3. New Weights Updating Rule with DWA
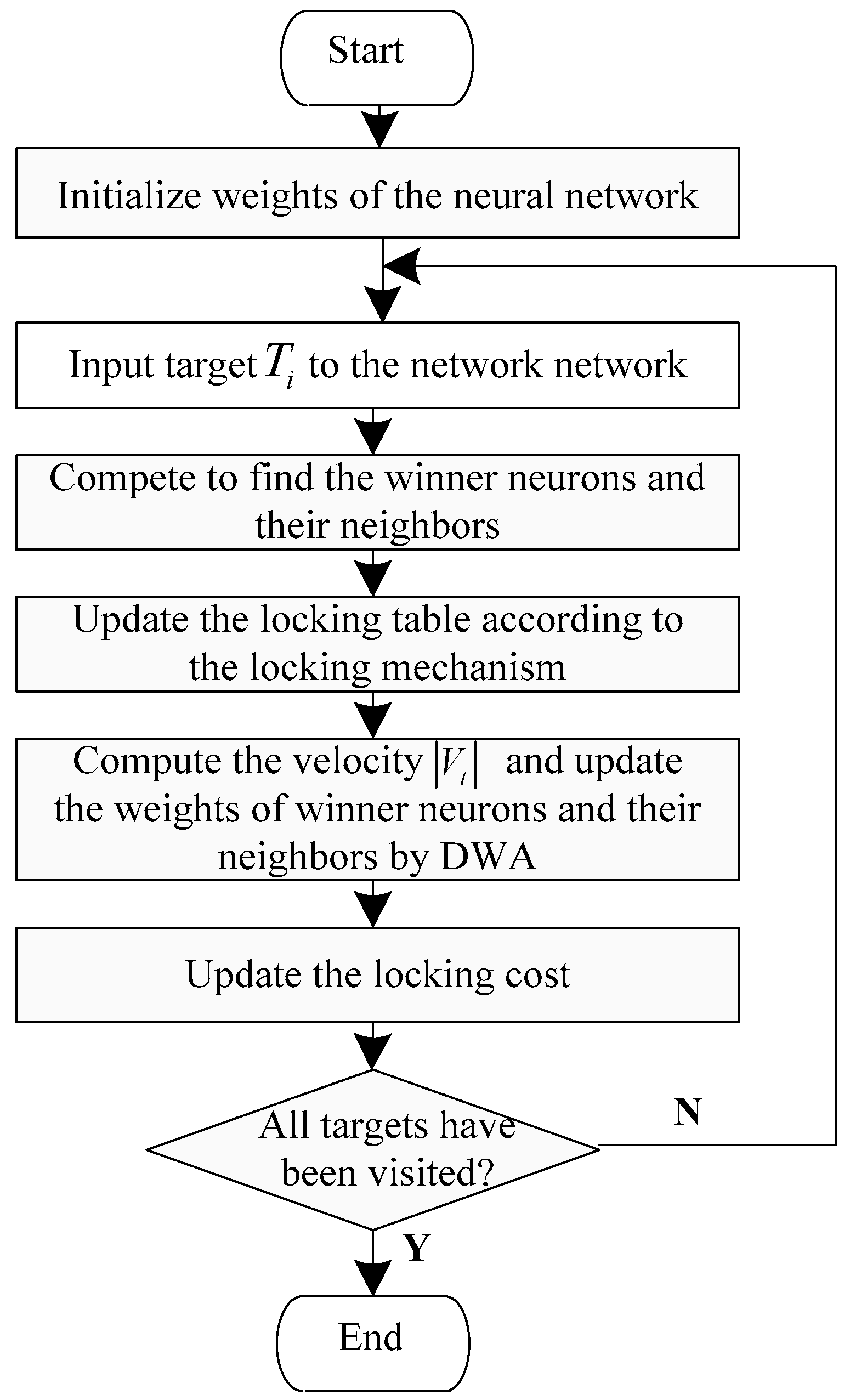
4.3. Implementation of the DSOM
- Step 1:
- Initialization. Initialize the weights of the output neuron (robots’ position), input neuron (tasks’ position), and locking table;
- Step 2:
- A task is randomly selected and input into the neural network;
- Step 3:
- According to winner selection rules and the neighborhood rules, the winner neurons (winner robots) and their neighbors are found;
- Step 4:
- Update the locking table according to the locking mechanism;
- Step 5:
- Compute the velocity and update the robots’ position of the winner robots and their neighbors by the adaptive DWA;
- Step 6:
- Update the locking cost;
- Step 7:
- Repeat steps 2 to 6 until all tasks and the program are completed.
5. Validation and Comparison
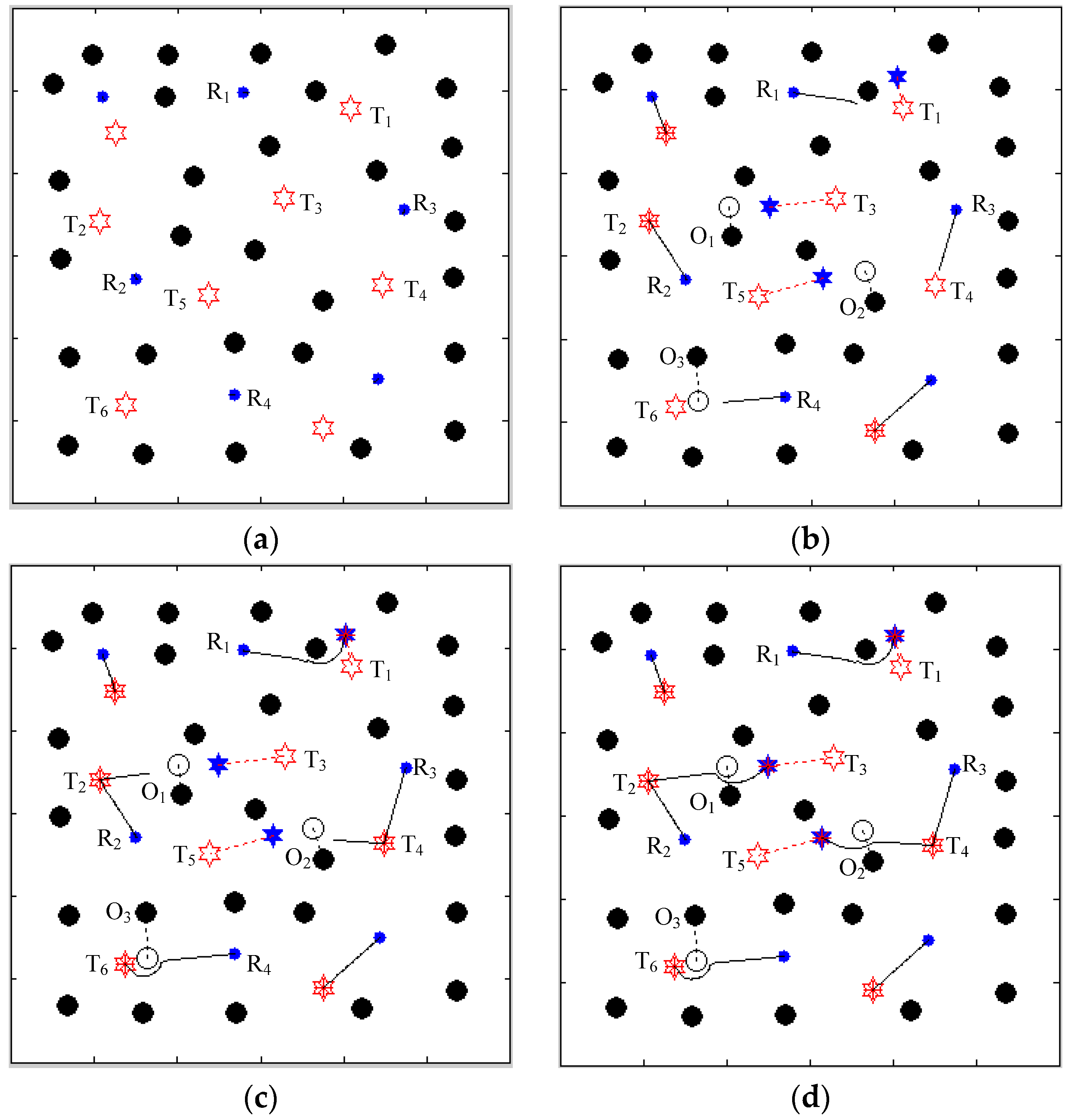
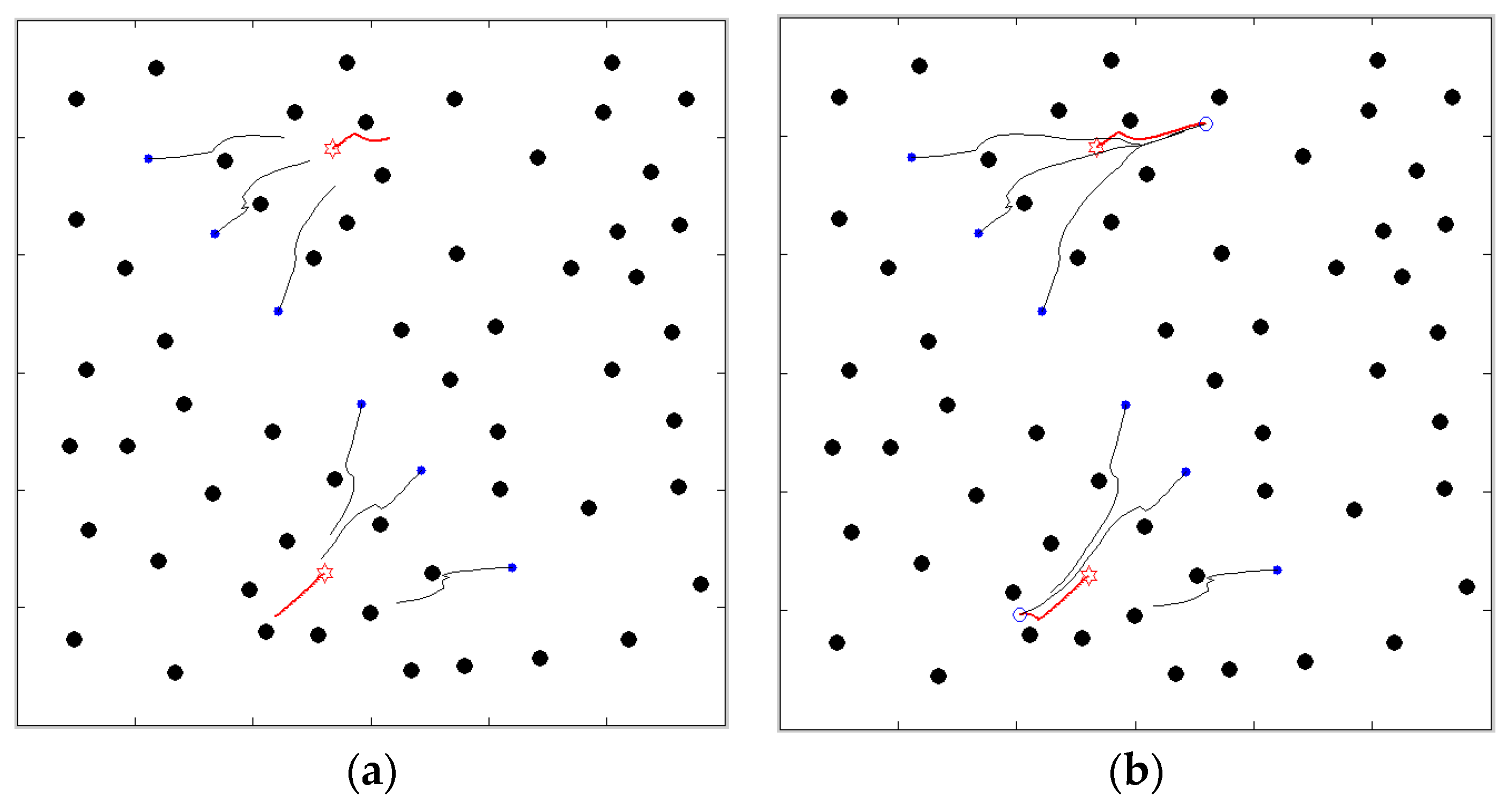
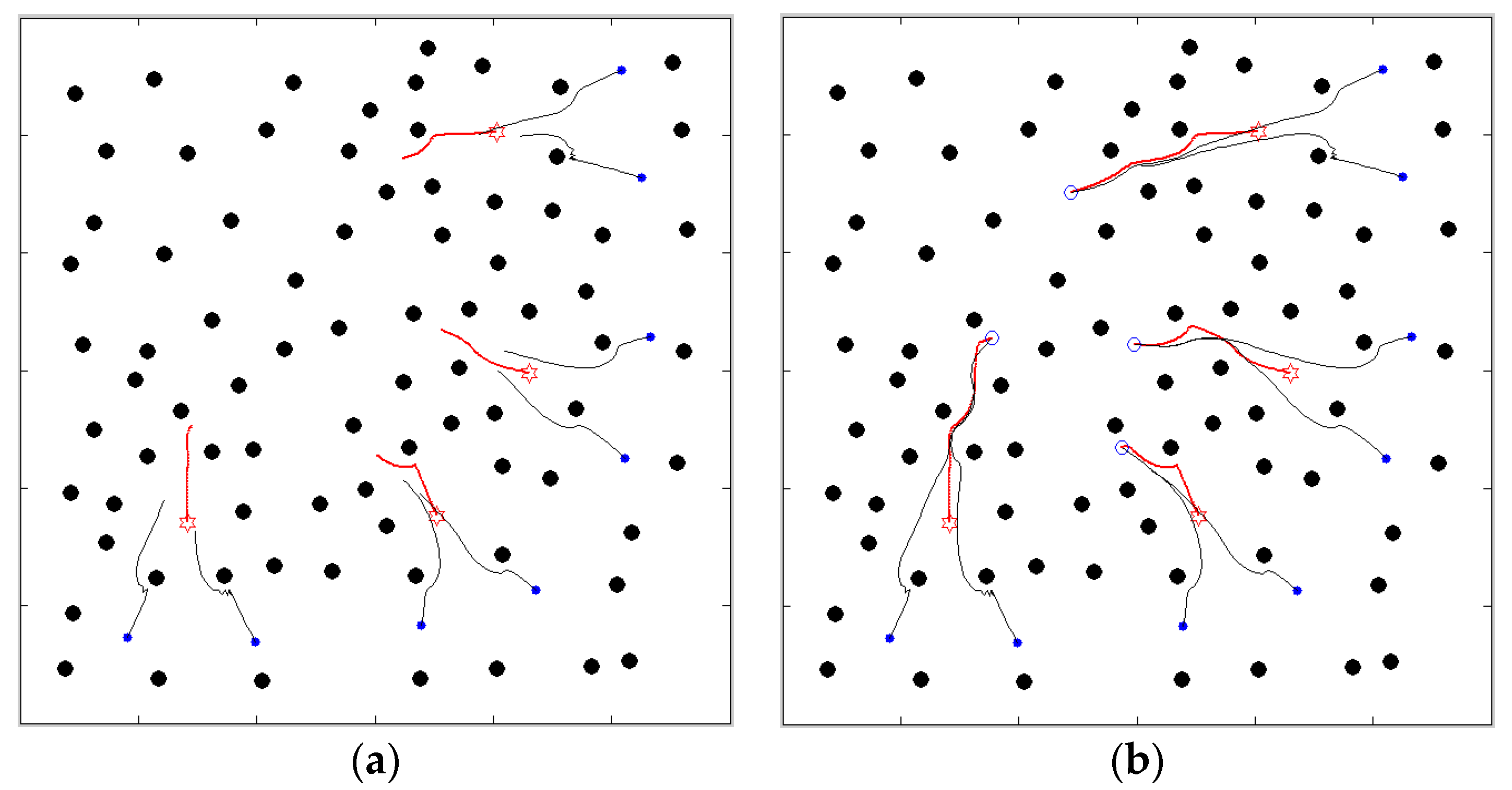
5.1. Unknown Environment with Dynamic Obstacles
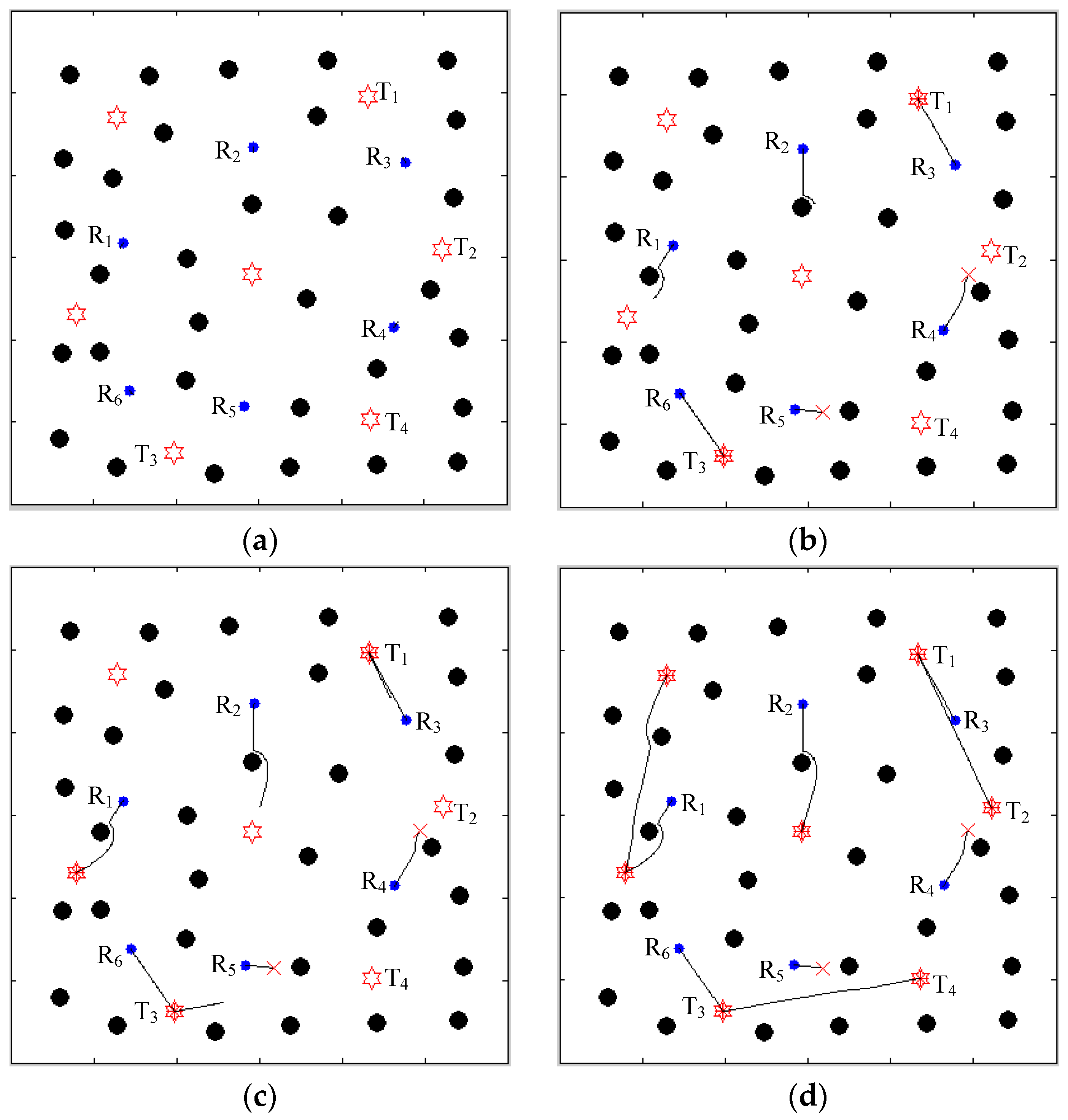
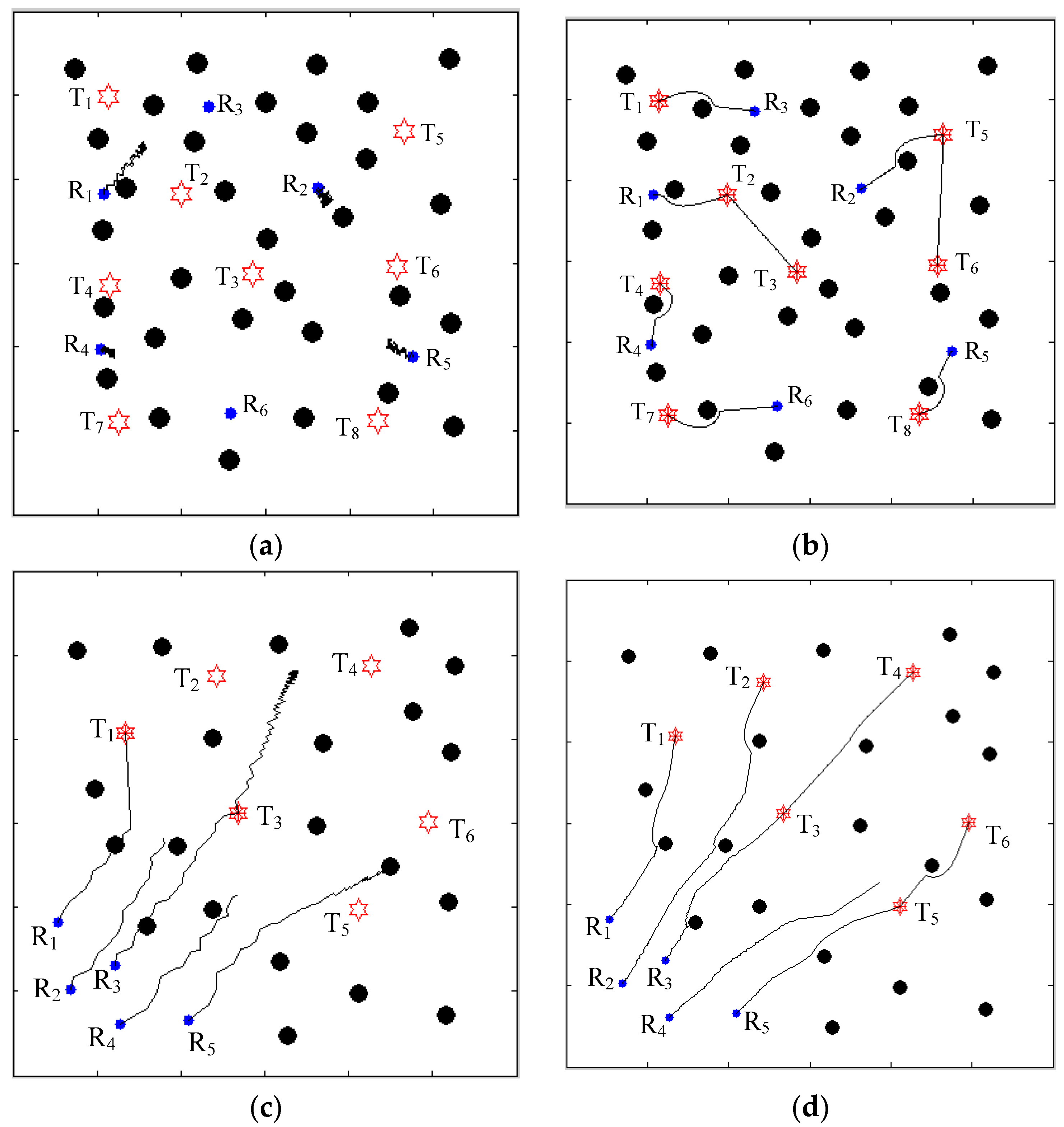
5.2. Multi-Robot Cooperative Search
5.3. Some Robots Failed
5.4. Robot Hovering Problem
5.5. Comparative Testing
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Zhu, D.; Cao, X.; Sun, B.; Luo, C. Biologically inspired self-organizing map applied to task assignment and path planning of an AUV system. IEEE Trans. Cogn. Dev. Syst. 2018, 10, 304–313. [Google Scholar] [CrossRef]
- Tang, H.; Sun, W.; Yu, H.; Lin, A.; Xue, M.; Song, Y. A novel hybrid algorithm based on PSO and FOA for target searching in unknown environments. Appl. Intell. 2019, 49, 2603–2622. [Google Scholar] [CrossRef]
- Bucolo, M.; Buscarino, A.; Famoso, C.; Fortuna, L.; Frasca, M. Control of imperfect dynamical systems. Nonlinear Dyn. 2019, 98, 2989–2999. [Google Scholar] [CrossRef]
- Tang, H.; Sun, W.; Yu, H.; Lin, A.; Xue, M. A multirobot target searching method based on bat algorithm in unknown environments. Expert Syst. Appl. 2020, 141, 112945. [Google Scholar] [CrossRef]
- Wei, C.; Hindriks, K.V.; Jonker, C.M. Dynamic task allocation for multi-robot search and retrieval tasks. Appl. Intell. 2016, 45, 1–19. [Google Scholar] [CrossRef]
- Liu, S.H.; Zhang, Y.; Wu, H.Y.; Liu, J. Multi-Robot Task Allocation Based on Swarm Intelligence. J. Jilin Univ. (Eng. Technol. Ed.) 2010, 40, 123–129. [Google Scholar]
- Yao, P.; Xie, Z.; Ren, P. Optimal UAV route planning for coverage search of stationary target in river. IEEE Trans. Control Syst. Technol. 2019, 27, 822–829. [Google Scholar] [CrossRef]
- Yao, P.; Cai, Y.; Zhu, Q. Time-optimal trajectory generation for aerial coverage of urban building. Aerosp. Sci. Technol. 2019, 84, 387–398. [Google Scholar] [CrossRef]
- Kohonen, T. Self-organized formation of topologically correct feature maps. Biol. Cybern. 1982, 43, 59–69. [Google Scholar] [CrossRef]
- Xia, B.; Yang, Y.; Zhou, J.; Chen, G.; Lai, Y. Using self organizing maps to achieve lithium-ion battery cells multi-parameter sorting based on principle components analysis. Energies 2019, 12, 2980. [Google Scholar] [CrossRef] [Green Version]
- Ganhadeiro, T.; Christo, E.; Meza, L.; Costa, K.; Souza, D. Evaluation of energy distribution using network data envelopment analysis and kohonen self organizing maps. Energies 2018, 11, 2677. [Google Scholar] [CrossRef] [Green Version]
- Gao, Y.; Sun, Y.; Wang, X.; Chen, F.; Ehsan, A.; Li, H.; Li, H. Multi-objective optimized aggregation of demand side resources based on a self-organizing map clustering algorithm considering a multi-scenario technique. Energies 2017, 10, 2144. [Google Scholar] [CrossRef] [Green Version]
- Zhu, A.; Yang, S.X. A neural network approach to dynamic task assignment of multirobots. IEEE Trans. Neural Netw. 2006, 17, 1278–1287. [Google Scholar] [PubMed]
- Xiang, C.; Zhu, D.; Yang, S.X. Multi-AUV target search based on bioinspired neurodynamics model in 3-D underwater environments. IEEE Trans. Neural Netw. Learn. Syst. 2015, 27, 2364. [Google Scholar]
- Cao, X.; Zhu, D. Multi-AUV task assignment and path planning with ocean current based on biological inspired self-organizing map and velocity synthesis algorithm. Intell. Autom. Soft Comput. 2017, 23, 31–39. [Google Scholar] [CrossRef]
- Faridi, A.Q.; Sharma, S.; Shukla, A.; Tiwari, R.; Dhar, J. Multi-robot multi-target dynamic path planning using artificial bee colony and evolutionary programming in unknown environment. Intell. Serv. Robot. 2018, 11, 171–186. [Google Scholar] [CrossRef]
- Sun, W.; Lv, Y.; Tang, H.; Xue, M. Mobile robot path planning based on an improved A*Algorithm. Hunan Daxue Xuebao/J. Hunan Univ. Nat. Sci. 2017, 44, 94–101. [Google Scholar]
- Zhao, Y.; Gu, J. Robot path planning based on improved genetic algorithm. In Proceedings of the 2013 IEEE International Conference on Robotics and Biomimetics (ROBIO), Shenzhen, China, 12–14 December 2013; pp. 2515–2522. [Google Scholar]
- Brass, P.; Cabrera-Mora, F.; Gasparri, A.; Xiao, J. Multirobot tree and graph exploration. IEEE Trans. Robot. 2011, 27, 707–717. [Google Scholar] [CrossRef]
- Khatib, O. Real-time obstacle avoidance for manipulators and mobile robots. In Autonomous Robot Vehicles; Cox, I.J., Wilfong, G.T., Eds.; Springer: New York, NY, USA, 1990; pp. 396–404. [Google Scholar]
- Zhang, T.; Zhu, Y.; Song, J. Real-time motion planning for mobile robots by means of artificial potential field method in unknown environment. Ind. Robot Int. J. 2010, 37, 384–400. [Google Scholar] [CrossRef]
- Sun, W.; Tao, Y.; Liu, X.Y.; Xue, M.; Lin, A.; Tang, H. An improved self-organizing map method for task assignment and path planning of multirobot in obstacle environment. In Proceedings of the 2018 Chinese Automation Congress (CAC), Xi’an, China, 30 November–2 December 2018; pp. 7–12. [Google Scholar]
- Fox, D.; Burgard, W.; Thrun, S. The dynamic window approach to collision avoidance. IEEE Robot. Autom. Mag. 1997, 4, 23–33. [Google Scholar] [CrossRef] [Green Version]
- Hong, Z.; Chun-Long, S.; Zi-Jun, Z.; Wei, A.; De-Qiang, Z.; Jing-Jing, W. A modified dynamic window approach to obstacle avoidance combined with fuzzy logic. In Proceedings of the 2015 14th International Symposium on Distributed Computing and Applications for Business Engineering and Science (DCABES), Guiyang, China, 18–24 August 2015; pp. 523–526. [Google Scholar]
- Luo, S.; Kim, J.; Parasuraman, R.; Bae, J.H.; Matson, E.T.; Min, B.-C. Multi-robot rendezvous based on bearing-aided hierarchical tracking of network topology. Ad Hoc Netw. 2019, 86, 131–143. [Google Scholar] [CrossRef]
- Sun, W.; Zhang, F.; Xue, M.; Hu, W.; Li, L. An SOM-based algorithm with locking mechanism for task assignment. In Proceedings of the 2017 IEEE International Conference on Cybernetics and Intelligent Systems (CIS) and IEEE Conference on Robotics, Automation and Mechatronics (RAM), Ningbo, China, 19–21 November 2017; pp. 36–41. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Average Iteration Times | Average Path Length | |||||
|---|---|---|---|---|---|---|
| DSOM | Method in [1] | Method in [22] | DSOM | Method in [1] | Method in [22] | |
| Case 1 | 156 | 153 | 151 | 288.94 | 286.81 | 284.24 |
| Case 2 | 199 | 214 | 205 | 304.46 | 314.02 | 305.32 |
| Case 3 | 207 | 220 | 211 | 350.88 | 360.43 | 353.56 |
| Case 4 | 187 | 190 | 198 | 342.67 | 343.62 | 347.25 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tang, H.; Lin, A.; Sun, W.; Shi, S. An Improved SOM-Based Method for Multi-Robot Task Assignment and Cooperative Search in Unknown Dynamic Environments. Energies 2020, 13, 3296. https://doi.org/10.3390/en13123296
Tang H, Lin A, Sun W, Shi S. An Improved SOM-Based Method for Multi-Robot Task Assignment and Cooperative Search in Unknown Dynamic Environments. Energies. 2020; 13(12):3296. https://doi.org/10.3390/en13123296
Chicago/Turabian StyleTang, Hongwei, Anping Lin, Wei Sun, and Shuqi Shi. 2020. "An Improved SOM-Based Method for Multi-Robot Task Assignment and Cooperative Search in Unknown Dynamic Environments" Energies 13, no. 12: 3296. https://doi.org/10.3390/en13123296
APA StyleTang, H., Lin, A., Sun, W., & Shi, S. (2020). An Improved SOM-Based Method for Multi-Robot Task Assignment and Cooperative Search in Unknown Dynamic Environments. Energies, 13(12), 3296. https://doi.org/10.3390/en13123296