Energy Efficiency of Pneumatic Cylinder Control with Different Levels of Compressed Air Pressure and Clamping Cartridge


Abstract
:1. Introduction
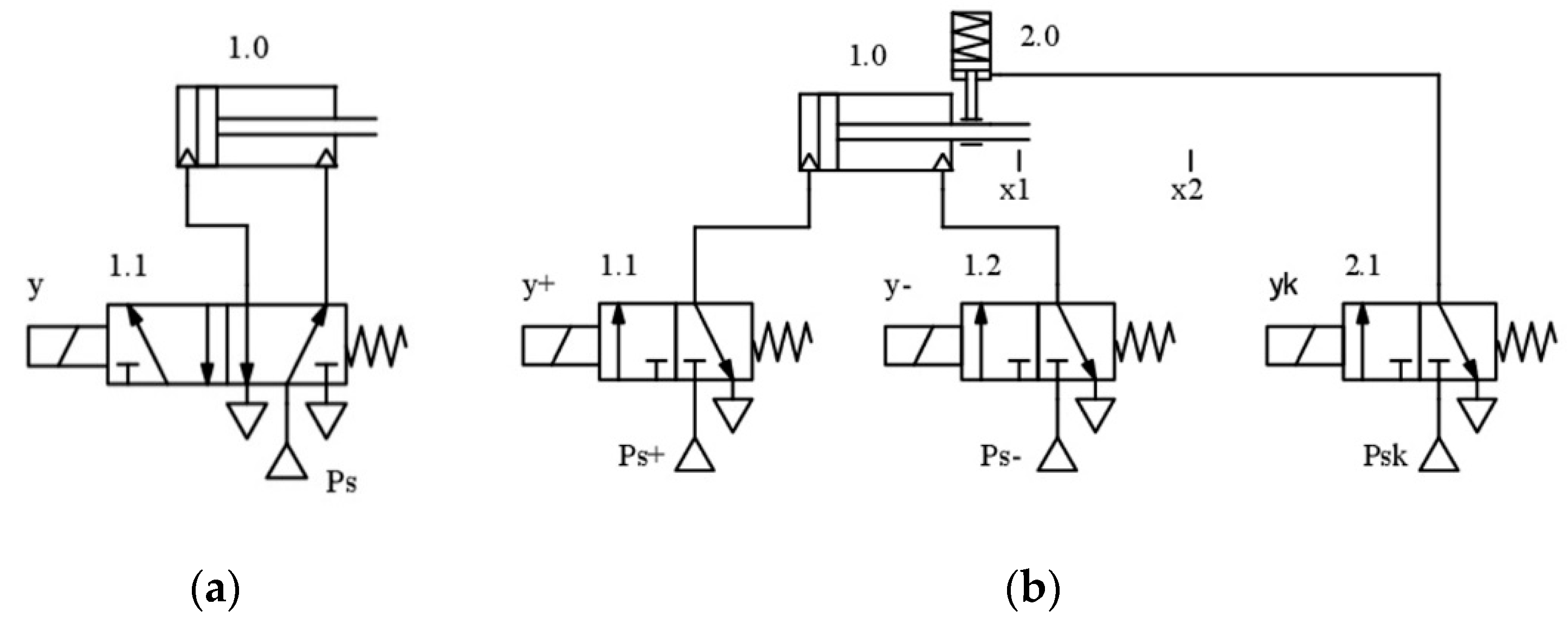
2. Cylinder Control System with Different Levels of Compressed Air Pressure and Holding the Final Position by Clamping Cartridge
A Mathematical Model of Cylinder Control with Different Levels of Compressed Air Pressure and Holding the Final Position by Clamping Cartridge
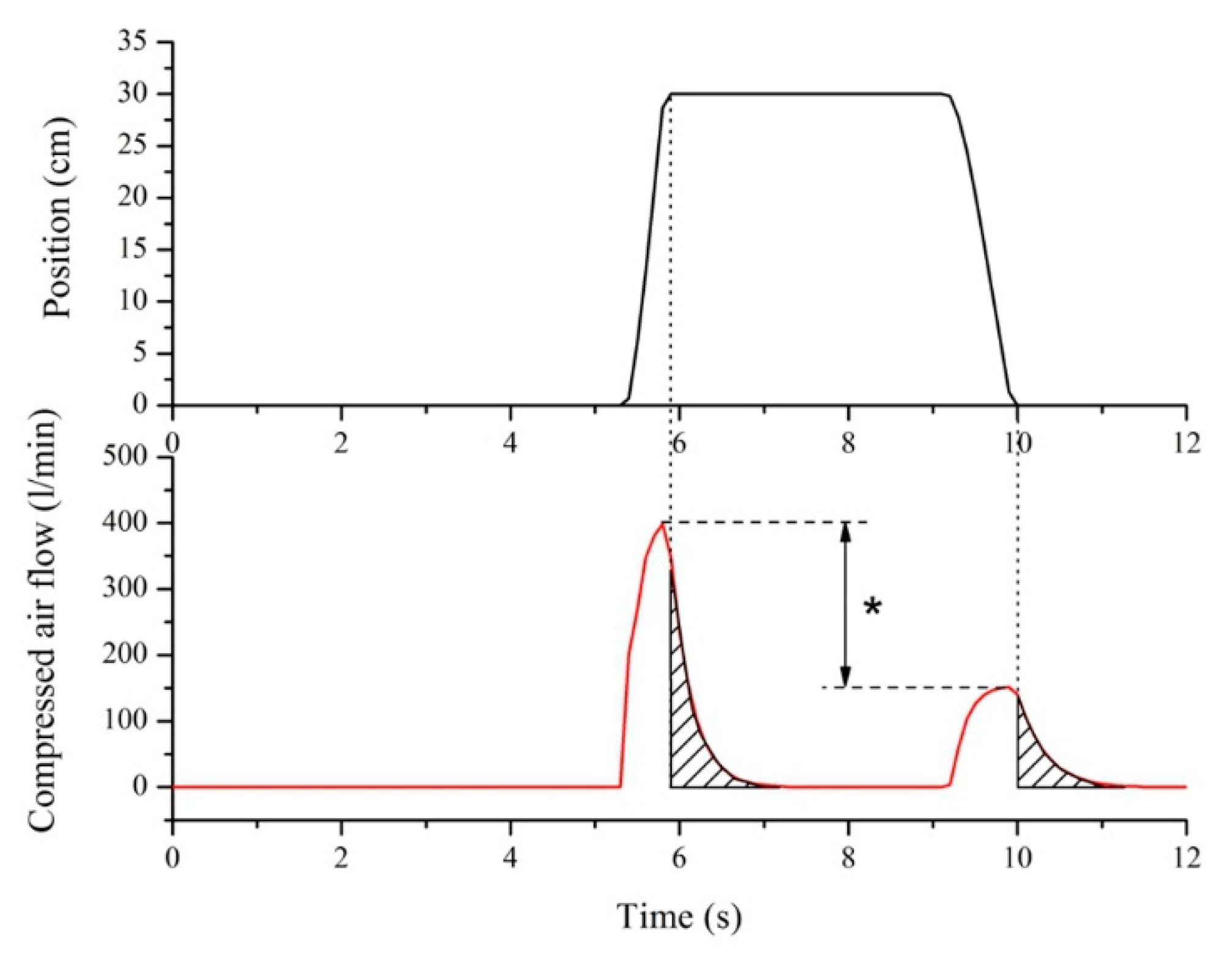
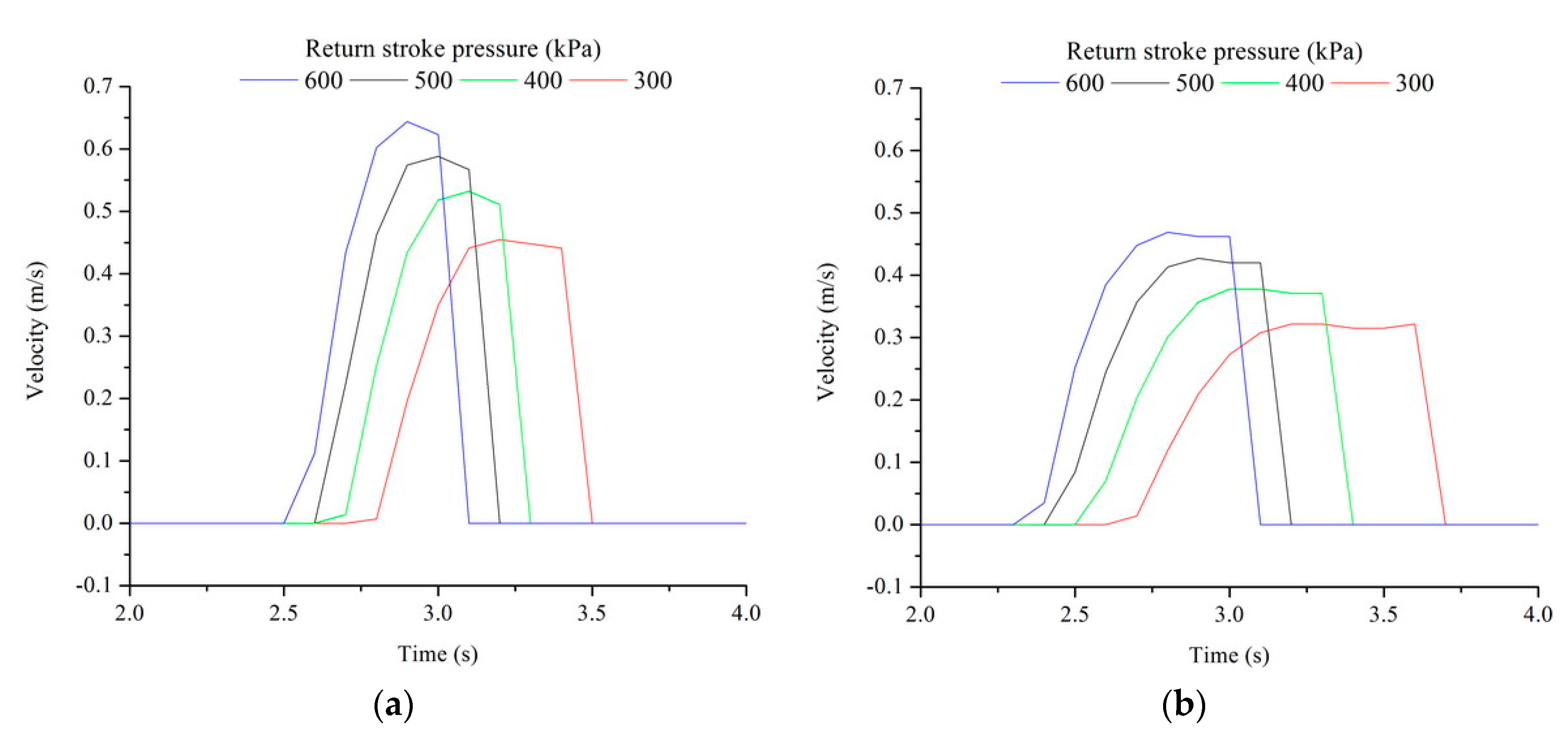
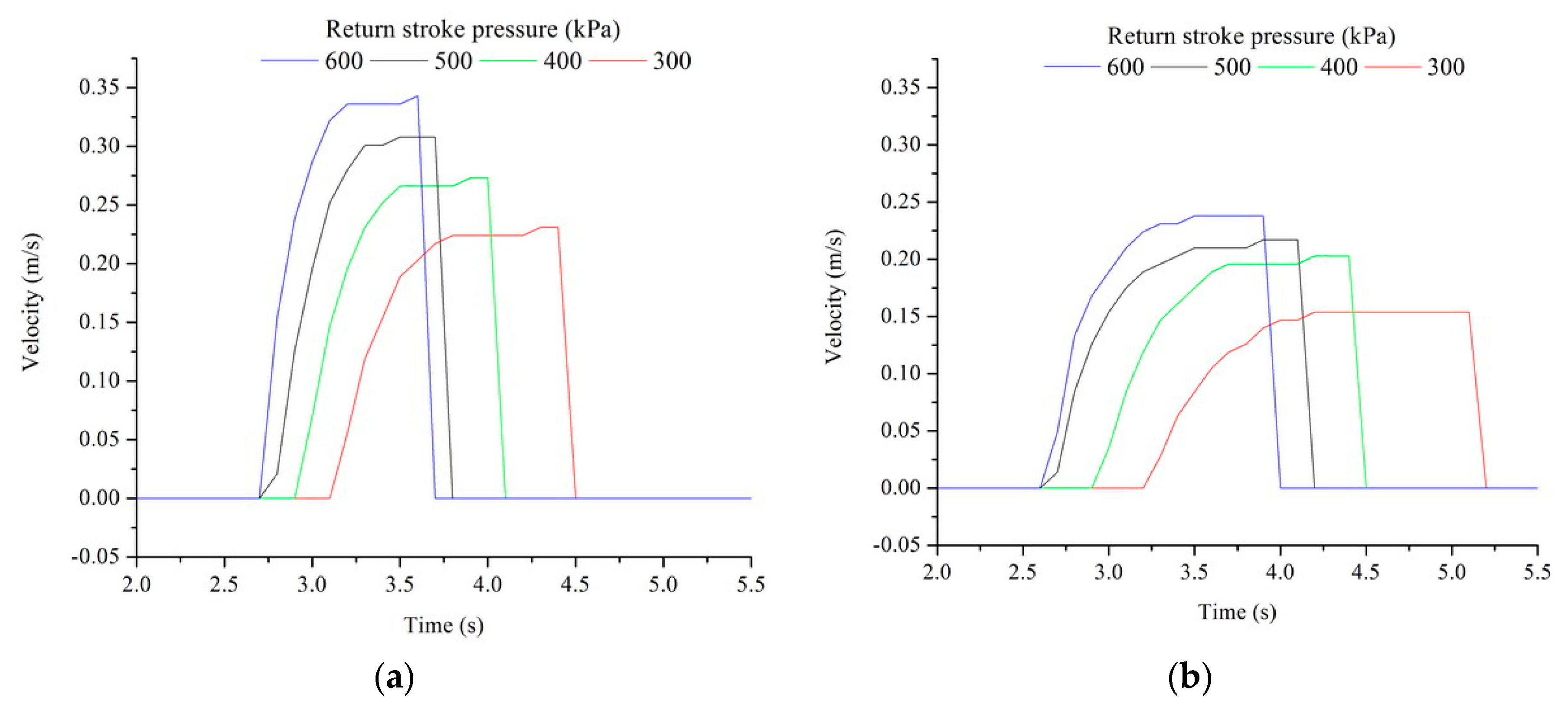
3. Results
4. Discussion
4.1. Cost-Effectiveness
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Blagojevic, V. Contribution to the Development of Efficient Control of Pneumatic Executive Organs. Ph.D. Thesis, University of Novi Sad, Faculty of Technical Science, Novi Sad, Serbia, 2010. [Google Scholar]
- Al-Dakkan, K.A.; Goldfarb, M.; Barth, E.J. Energy saving control for pneumatic servo systems. In Proceedings of the 2003 IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM 2003), Kobe, Japan, 20–24 July 2003; pp. 284–289. [Google Scholar]
- Yang, F.; Tadano, K.; Li, G.; Kagawa, T.; Peng, J. Simulation on the Characteristics of Pneumatic Booster Valve with Energy Recovery, AsiaSim 2016, SCS AutumnSim 2016. Commun. Comput. Inf. Sci. 2016, 645, 143–153. [Google Scholar]
- Yang, F.; Tadano, K.; Li, G.; Kagawa, T. Analysis of the Energy Efficiency of a Pneumatic Booster Regulator with Energy Recovery. Appl. Sci. 2017, 7, 816. [Google Scholar] [CrossRef]
- Luciano, E.; Victor, J.; De, N.; Eugênio, B.C. Compressed air saving in symmetrical and asymmetrical pneumatic positioning systems. Proc. Inst. Mech. Eng. Part I 2015, 229, 957–969. [Google Scholar]
- Joshua, J.C.; Christopher, J.N.; Seth, T.; Aaron, J.; Sankaran, M.; Eric, J.B. Energy conservation in industrial pneumatics: A state model for predicting energetic savings using a novel pneumatic strain energy accumulator. Appl. Energy 2017, 198, 239–249. [Google Scholar]
- Wang, Z.; Xiong, W.; Wang, H. Exergy analysis of the pneumatic line throwing system. Int. J. Exergy 2017, 19, 364–379. [Google Scholar] [CrossRef]
- Shen, X.; Goldfarb, M. Energy Saving in Pneumatic Servo Control Utilizing Interchamber Cross-Flow. J. Dyn. Syst. Meas. Control 2007, 129, 303–310. [Google Scholar] [CrossRef]
- Yang, A.; Pu, J.; Wong, C.B.; Moore, P. By-pass valve control to improve energy efficiency of pneumatic drive system. Control Eng. Pract. 2009, 17, 623–628. [Google Scholar] [CrossRef]
- Šešlija, D.; Čajetinac, S.; Blagojević, V.; Šulc, J. Application of pulse width modulation and by-pass valve control for increasing energy efficiency of pneumatic actuator system. Proc. Inst. Mech. Eng. Part I 2018, 232, 1314–1324. [Google Scholar] [CrossRef]
- Bartyś, M.; Hryniewicki, B. The Trade-Off between the Controller Effort and Control Quality on Example of an Electro-Pneumatic Final Control Element. Actuators 2019, 8, 23. [Google Scholar] [CrossRef] [Green Version]
- Kanno, T.; Hasegawa, T.; Miyazaki, T.; Yamamoto, N.; Haraguchi, D.; Kawashima, K. Development of a Poppet-Type Pneumatic Servo Valve. Appl. Sci. 2018, 8, 2094. [Google Scholar] [CrossRef] [Green Version]
- Harris, P.; Nolan, S.; O’Donnell, G.E. Energy optimisation of pneumatic actuator systems in manufacturing. J. Clean. Prod. 2014, 72, 35–45. [Google Scholar] [CrossRef]
- Cummins, J.J.; Barth, E.J.; Adams, D.E. Modeling of a pneumatic strain energy accumulator for variable system configurations with quantified projections of energy efficiency increases. In ASME/BATH 2015 Symposium on Fluid Power and Motion Control; American Society of Mechanical Engineers: Chicago, IL, USA, 2015; V001T01A055.ASME. [Google Scholar]
- Luo, X.; Wang, J.H.; Sun, H.; Derby, J.W.; Mangan, S.J. Study of a new strategy for pneumatic actuator system energy efficiency improvement via the scroll expander technology. IEEE/ASME Trans. Mechatron. 2013, 18, 1508–1518. [Google Scholar] [CrossRef]
- Luo, X.; Sun, H.; Wang, J.H. An energy efficient pneumatic-electrical system and control strategy development. In Proceedings of the 2011 American Control Conference, San Francisco, CA, USA, 29 June–1 July 2011. [Google Scholar]
- Nehler, T. Linking energy efficiency measures in industrial compressed air systems with non-energy benefits—A review. Renew. Sustain. Energy Rev. 2018, 89, 72–87. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Piston Diameter (mm) | Compressed Air Consumption (l) |
|---|---|
| 32 | 3.58 |
| 40 | 4.64 |
| 63 | 10.65 |
| 80 | 18.86 |
| 100 | 29.48 |
| 125 | 45.77 |
| Piston Diameter (mm) | Compressed Air Consumption with Return Stroke Pressure of 500 kPa (l) | Compressed Air Consumption with Return Stroke Pressure of 400 kPa (l) | Compressed Air Consumption with Return Stroke Pressure of 300 kPa (l) |
|---|---|---|---|
| 32 | 2.64 | 2.52 | 2.4 |
| 40 | 3.43 | 3.27 | 3.11 |
| 63 | 7.87 | 7.47 | 7.14 |
| 80 | 14.03 | 13.48 | 12.76 |
| 100 | 21.95 | 20.82 | 19.91 |
| 125 | 33.92 | 32.45 | 30.9 |
| Piston Diameter (mm) | Compressed Air Consumption with Return Stroke Pressure of 500 kPa (l) | Compressed Air Consumption with Return Stroke Pressure of 400 kPa (l) | Compressed Air Consumption with Return Stroke Pressure of 300 kPa (l) |
|---|---|---|---|
| 32 | 26.26 | 29.61 | 32.96 |
| 40 | 26.08 | 29.53 | 32.97 |
| 63 | 26.1 | 29.86 | 32.96 |
| 80 | 25.61 | 28.53 | 32.34 |
| 100 | 25.54 | 29.38 | 32.46 |
| 125 | 25.89 | 29.1 | 32.49 |
| Piston Diameter (mm) | Duration of Movement with Return Stroke Pressure of 600 kPa (s) | Duration of Movement with Return Stroke Pressure of 500 kPa (s) | Duration of Movement with Return Stroke Pressure of 400 kPa (s) | Duration of Movement with Return Stroke Pressure of 300 kPa (s) |
|---|---|---|---|---|
| 32 | 0.3 | 0.3 | 0.4 | 0.4 |
| 40 | 0.4 | 0.4 | 0.5 | 0.6 |
| 63 | 0.6 | 0.7 | 0.8 | 1 |
| 80 | 0.8 | 0.9 | 1.1 | 1.4 |
| 100 | 1 | 1.1 | 1.4 | 1.8 |
| 125 | 1.4 | 1.6 | 1.9 | 2.6 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Blagojevic, V.; Seslija, D.; Dudic, S.; Randjelovic, S. Energy Efficiency of Pneumatic Cylinder Control with Different Levels of Compressed Air Pressure and Clamping Cartridge. Energies 2020, 13, 3711. https://doi.org/10.3390/en13143711
Blagojevic V, Seslija D, Dudic S, Randjelovic S. Energy Efficiency of Pneumatic Cylinder Control with Different Levels of Compressed Air Pressure and Clamping Cartridge. Energies. 2020; 13(14):3711. https://doi.org/10.3390/en13143711
Chicago/Turabian StyleBlagojevic, Vladislav, Dragan Seslija, Slobodan Dudic, and Sasa Randjelovic. 2020. "Energy Efficiency of Pneumatic Cylinder Control with Different Levels of Compressed Air Pressure and Clamping Cartridge" Energies 13, no. 14: 3711. https://doi.org/10.3390/en13143711
APA StyleBlagojevic, V., Seslija, D., Dudic, S., & Randjelovic, S. (2020). Energy Efficiency of Pneumatic Cylinder Control with Different Levels of Compressed Air Pressure and Clamping Cartridge. Energies, 13(14), 3711. https://doi.org/10.3390/en13143711