1. Introduction
With over three million registered units worldwide in 2017 [
1], driven by their own improving competitiveness over conventional powertrains and incremental government support, the market share of plug-in electric vehicles (PEVs) is expected to grow further. By 2030 the projected number of light-duty vehicles ranges from 125 to 220 million [
1]. If uncoordinated, the charging of PEVs, which include both plug-in hybrid (PHEV) and battery electric vehicles (BEV), may pose major technical and operational challenges that could compromise the stability and reliability of low voltage distribution networks [
2,
3].
Among those challenges, thermal congestions are one of the most severe. The overloading of the main network assets, namely, distribution transformers and head feeders, due to a prolonged exposure to operational currents above their thermal limits, may result in overheating, asset deterioration, protection triggering and eventual risk of failure, compromising the normal operation of the network [
4]. If coincident with peak domestic loads [
3], PEV charging may result in significant thermal stress, especially in densely clustered residential networks with hundreds of customers, prone to experiencing network congestions [
5,
6].
The uncertainty and variability brought by the increasing share of distributed renewable energy resources combined with the current digitalization of power systems are driving DSOs to seek active management based solutions [
5] as substitutions for traditional, expensive grid reinforcements and network expansions, only required to face peak loads a few hours per year [
7]. Consequently an active control of the charging demand of PEVs could help prevent, delay or substitute network reinforcements and expansions [
8], mitigating their impacts while complying with the needs of the drivers.
Many charging management strategies have been proposed to address the thermal impacts caused by PEVs on distribution systems based on limiting their charging rates according to the measured or foreseen state of the network. Optimal coordinated charging between all cars in order to mitigate network congestions can be achieved through centralized control architectures, while at the same time exploiting their charging flexibility to satisfy different objectives, such as minimizing system losses [
9], curtailing costs for DSOs [
5] and maximizing user comfort [
3], among others. Centralized control schemes are better suited for the application of optimization algorithms, as all required information will be available at a central unit facilitating the management of distribution networks and the provision of supplementary services [
8]. However, as highlighted in [
3], many of these solutions propose complex optimization strategies which face major practical barriers related to ICT and computational costs, and large network, PEV and market data requirements. This makes their adoption unfeasible in the short-term and mid-term.
To overcome this, the authors in [
10] focused on developing a tradeoff between the complexity of a market-based control and the simplicity of a price-based control. On the other hand, combining the two aspects can make the algorithm difficult to be understood. Their algorithm solves network congestions efficiently, but still needs testing on real hardware. In [
11] Shao et al. introduced a centralized method to relieve congestions on the transmission level. While the proposed algorithm performs well, it could be relatively heavy to calculate in a realistic implementation. It is a generally recognized fact that EVs have a minor impact on the power transmission network, since the bottlenecks are mostly local. Including aspects of the transmission level in the algorithm increases the complexity of the problem, but may not pay back.
The study presented in [
12] tackled the computational costs with a probabilistically-based method. Instead of calculating all relevant parameters for each control step, the method relies on the probability of whether a voltage or a thermal violation will happen or not. The results are clearly encouraging and a significant reduction in computation capacity was achieved. The disadvantage of the EV control system is that it requires a significant amount of data from the network, which is not always easily available. The study also makes a clear contribution to probability-based control methods in smart grids in general. Although congestion management is a secondary product of the algorithm presented in [
13], it is an important feature. The authors developed a charging protocol that takes into account possible congestions and voltage violations. However, the performance of the algorithm regarding congestions and voltage violations was not discussed in detail. One major advantage of this decentralized strategy is the high efficiency in comparison with other similar algorithms. The method has many advantages and the function should still be tested on commercial charging infrastructure. As in [
12,
13], and in [
14], the constraints of voltage and congestions are controlled indirectly through PEVs. The authors present a relatively complex algorithm, but while still taking the fairness and customer satisfaction into account, which is highly recommendable with a view toward commercial applications and is not overstated in the scientific literature. Combining all this into one algorithm can make the algorithm difficult to be understood. The compatibility of the algorithm with the current charging standards is not discussed.
The study in [
15] focused on the coordination of the charging of PEVs together with photovoltaic power generators. The algorithm clearly improves voltage quality, but the most important limitation is that it works only in areas with very high penetration of distributed photovoltaic power. In [
16], the authors not only focus on PEVs but take a more holistic approach by coordinating the charging of PEVs together with on-load tap changers, voltage regulators and capacitor banks in order to improve voltage profiles and decrease network losses. The algorithm is efficient; however, the paper does not discuss practical aspects of the implementation, which might be very complex. Likewise, the work in [
17] sought to perform voltage control through not only PEVs but also by using on-load tap changers and capacitors in low and medium voltage networks. As said complicated control algorithm grows into a very complex one easily, practical aspects regarding its real implementation should be discussed. The topology of the innovative four-quadrant charging stations employed in [
17] is further examined in more detailed in [
18]. Additionally, the study in [
19] examined voltage control through PEVs in coordination with an on-load tap changer. The work focused on microgrid applications. A fundamental distinctness compared with most studies is that it also considered economic metrics and impacts. In [
20] the concept of smart loads to relieve voltage issues caused by the charge of PEVs is discussed. The approach presented is able to correct short-term voltage problems, so other means, such as an on-load tap changer, are necessary to make voltage corrections during longer time periods. However, the idea in [
20] seems to offer another fruitful branch of research considering the integration of PEVs to low voltage networks. Another promising trend is to study a stationary battery energy storage option together with a PEV charging station in order to make the operation of the battery lighter from the network viewpoint. Different aspects of such implementations are discussed in [
21,
22,
23]. Even though energy storage systems are not further discussed in this paper, it is still important to recognize them as a possible solution in the future.
In contrast, a simple droop-based controller for the provision of multiple ancillary services, including network congestions, was proposed and validated in [
24]. The authors pointed out the overall lack of field validation of the suggested controls in the current literature. This topic was the focal point in [
25], wherein it was successfully demonstrated that autonomous droop controllers can support network voltage in practice, even in relatively severe situations. Unlike many others, this study improved the state-of-the-art in experimental testing. The work in [
26] introduced a charging strategy with similar objectives as the one in [
25], considering voltage and thermal limits of the network based on droop control. In addition to positive results, the authors discussed the limitations of the communications, which is a crucial aspect in commercial implementations. An important difference with the work in [
25] is that the research in [
26] has a strong focus on microgrid applications. Additionally, an interesting charging strategy considering network congestions is presented in [
27]. The strategy is more straightforward than the ones presented in [
25,
26]; while it does modulate the charging of PEVs, it only does so by enabling or disabling the charging current and does not consider voltage constraints. Due to the discrete switching of the EVs, the algorithm is quite rough and may result in an oscillating behavior at large charging sites. This aspect was not discussed. However, the method was tested on commercial PEVs.
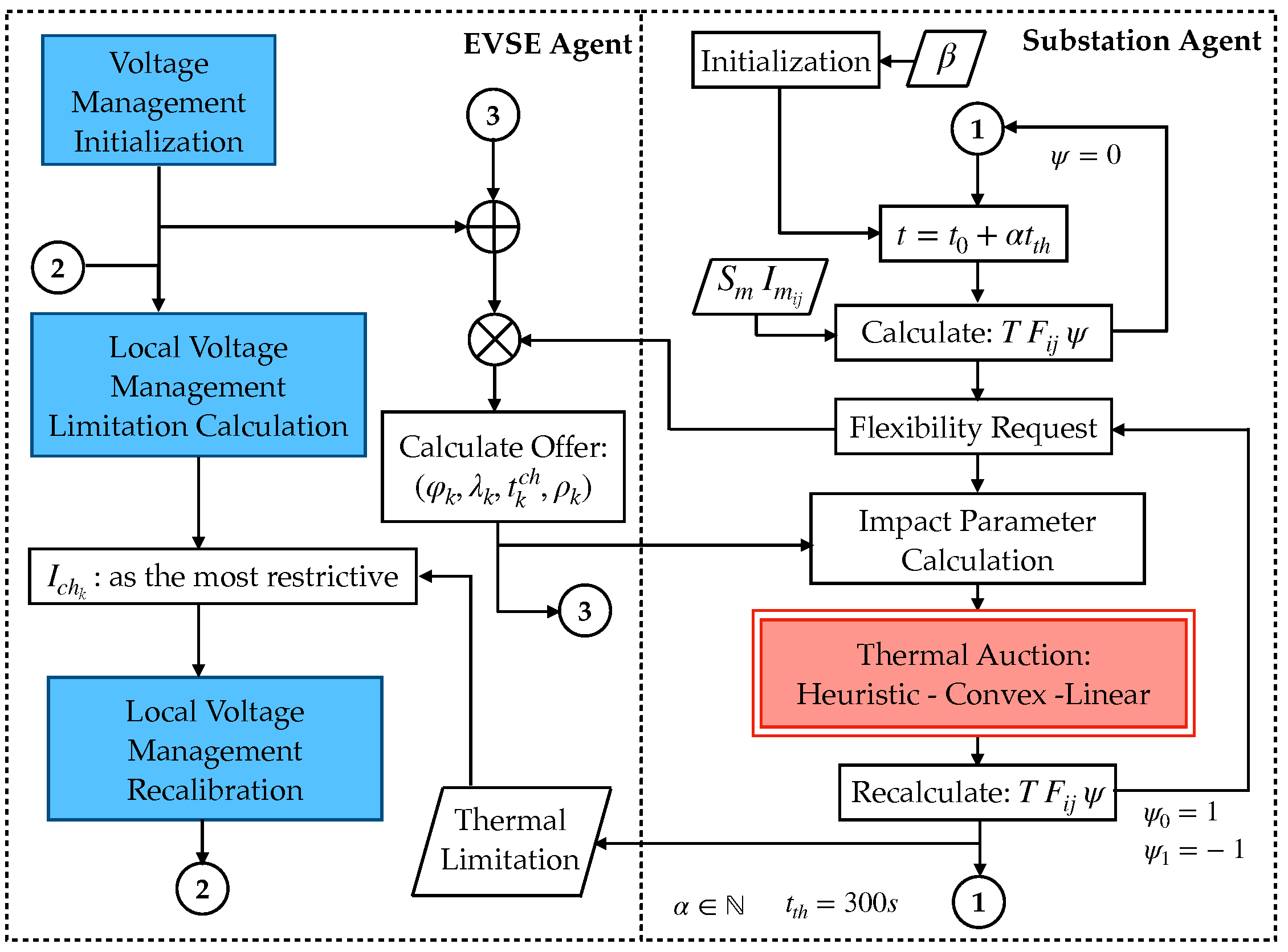
To address these issues, a real-time agent-based charge control algorithm designed to mitigate the impacts of uncontrolled domestic Mode 3 AC charging on radial distribution networks was presented and validated through hardware-in-the-loop (HIL) simulations in [
28]. Due to employing centralized flexibility-offer-based congestion management designed to minimize the impact on car owners and combining that with a decentralized sensitivity-based nodal voltage control, its formulation and architecture were conceived to require a minimal infrastructural deployment for its operation.
The current work is intended to serve as a continuation of the foundations laid in [
28]. This paper proposes two novel problem formulations, linear and convex, to replace the the current heuristic thermal management of the charge control algorithm described in [
28]. Additionally, the performances and levels of effectiveness of both approaches are evaluated and compared with each other and with the existing one. The new suggested problem formulations are also conceived to minimize the total impact upon car owners and designed to serve as a complete replacement of the current thermal management. This means guaranteeing full compatibility with the architecture and operation of the algorithm, and coordination with the local voltage management. Moreover, no additional data are required for their execution, ensuring the same minimal infrastructural deployment is needed for the operation of the charge control algorithm, solely requiring once again controllable charging stations (EVSE), communication links and strategically allocated sensors across the network [
28].
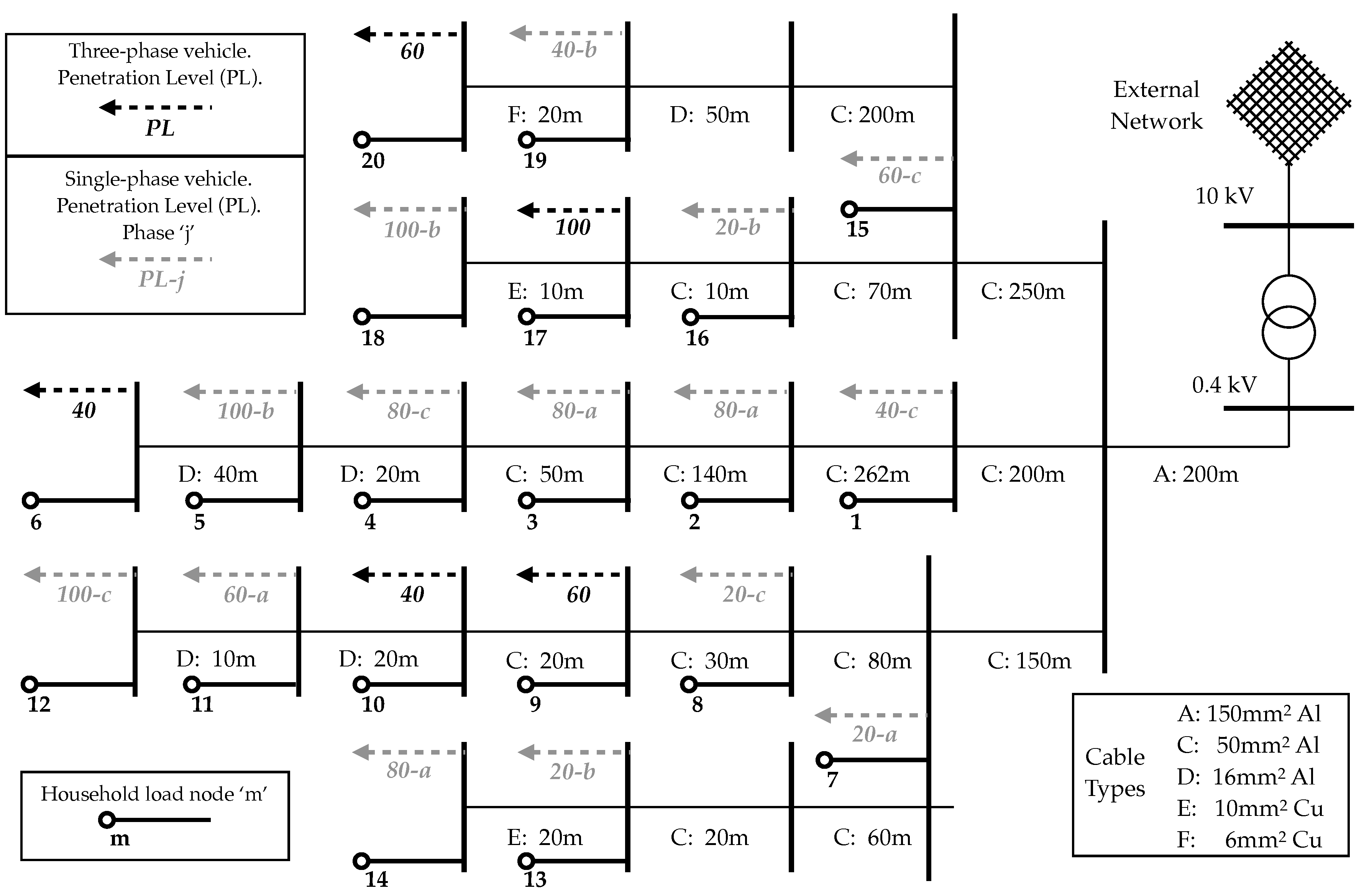
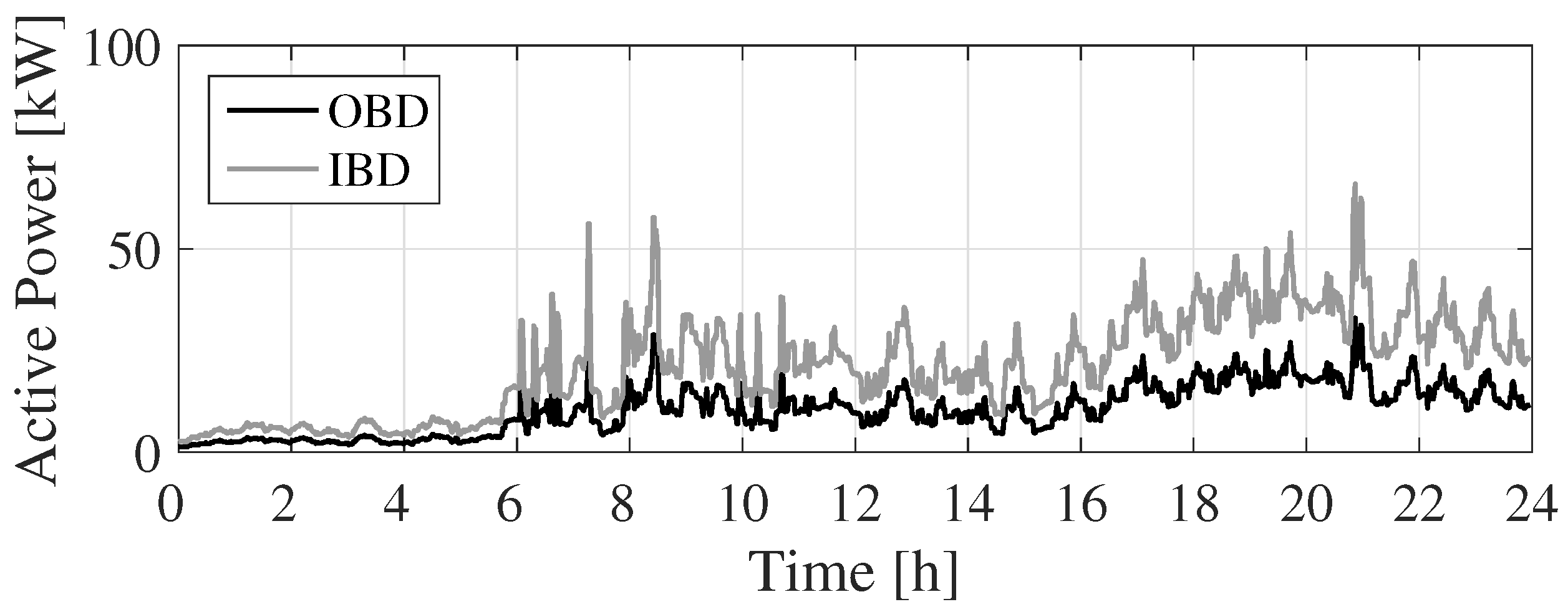
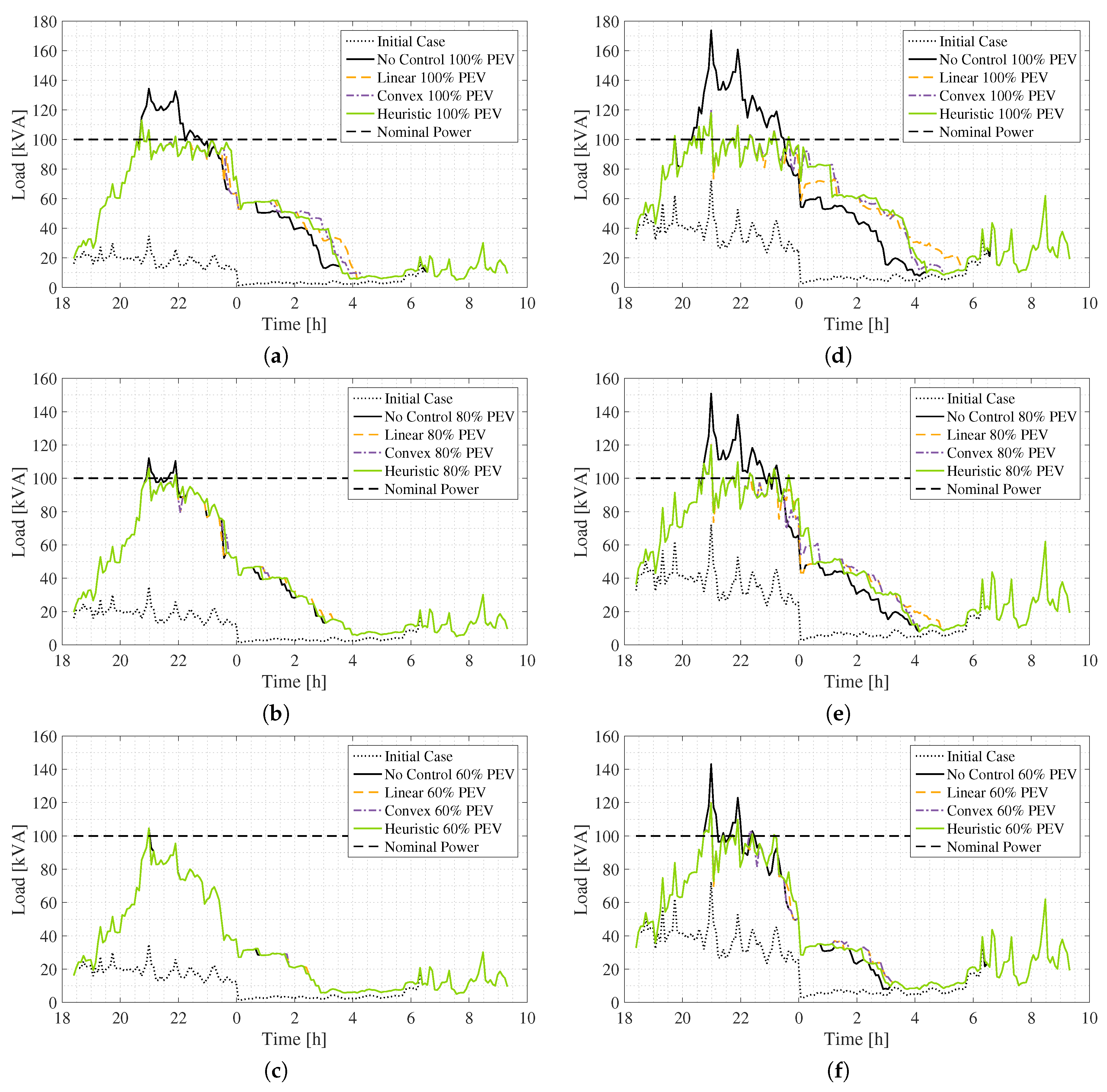
A complete set of night charging episodes under increasing PEV penetrations were tested on a residential low voltage (LV) grid facing comprehensively severe conditions, given by two peak winter domestic demand scenarios and a low initial state of charge (SOC) for all vehicles. To assess the effectiveness of all three thermal implementations, their execution times and the final share of PEV owners who achieved a final acceptable SOC were weighted against their capacity to mitigate the registered network impacts for the uncontrolled and controlled charging scenarios. Moreover, to clearly evaluate the different formulations, the execution of the algorithm was solely limited to the central thermal control, disabling the local voltage management.
The contributions of this paper are:
The paper is organized as follows.
Section 2 introduces the two alternative thermal management formulations for the algorithm in [
28], linear and convex.
Section 3 describes the simulation environment and the considered study cases. The main results showcasing and comparing the performances of all implementations are presented and discussed in
Section 4. Finally, the main conclusions from the study are drawn in
Section 5. Nomenclature is provided in
Table 1.








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}