Fault Ride through Capability Analysis (FRT) in Wind Power Plants with Doubly Fed Induction Generators for Smart Grid Technologies †


Abstract
:1. Introduction
2. Review of Wind Turbine Technologies
3. Design, Modelling and Operating Characteristics of Wind Turbine Technologies
3.1. Mathematical Modelling of DFIG Under Balanced Conditions of Utility Grid Voltages
3.2. Mathematical Modelling of Active and Reactive Power for Wind Turbines Based on DFIG during Transmission Line
3.3. Mathematical Modelling of DFIG under Unbalanced Conditions of Utility Grid Voltages
3.4. The Main Novelties and Contribution of the Proposed Method are Summarized Here
- i.
- The control and automation strategy obtained by using a SCADA viewer, wind sim (software for emulating wind behavior in different scenarios) and an Active Servo software package is very important to emulate and analyze the fault ride through capability for wind power plants to stay connected to a network when a fault occurs. The aforementioned software packages have revealed that some of them can be used in an HVDC system, Photovoltaic system (PV) and storage management.
- ii.
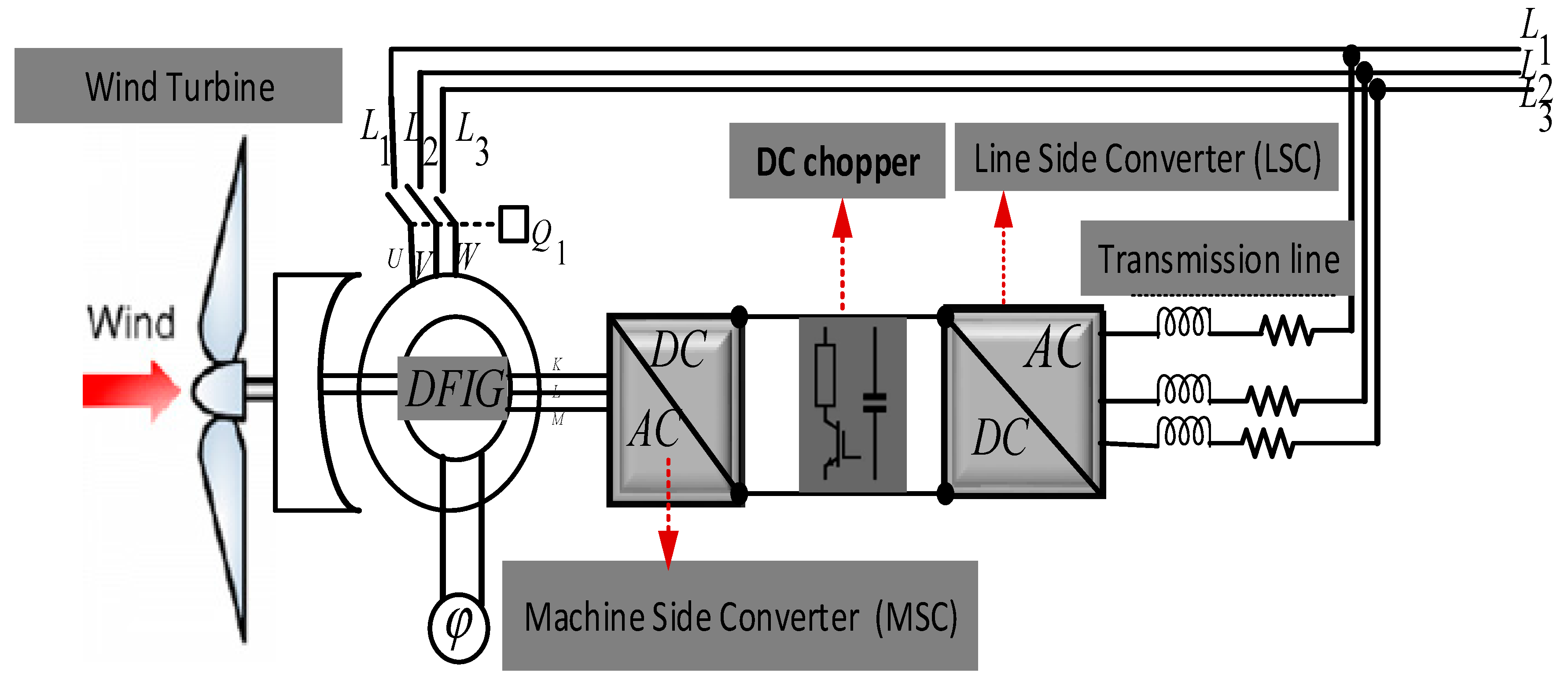
- The excess energy flowing from the rotor circuit into the machine side converter may be dissipated through a DC chopper when the power flow is interrupted by a fault because the intermediate circuit voltage between the machine side converter and line side converter can attain unacceptably high values. A DC chopper basically consists of an IGBT that discharges the intermediate circuit via several brake resistors. The energy stored in this circuit is converted into heat so that the voltage drops.
- iii.
- The use of a crowbar device in the event of a serious fault when the DC chopper may no longer suffice to limit the intermediate circuit voltage. In such situations, an AC crowbar should be used instead in wind power plants.
- iv.
- The use of a ferrite device can be one method for reducing electromagnetic interference.
4. The Principal Concepts of Wind Power Plants Technologies
4.1. Fixed Speed Wind Power Plants
4.2. Variable Speed Wind Power Plants
4.2.1. Synchronous Generator with a Fully Rated Converter
4.2.2. Doubly Fed Induction Generators
4.2.3. Slip Control Strategy for Wind Turbines Based on DFIG
4.2.4. Speed Control Strategy for Wind Turbines Based on DFIG
5. Traditional Grid Technologies Versus Smart Grid Technologies
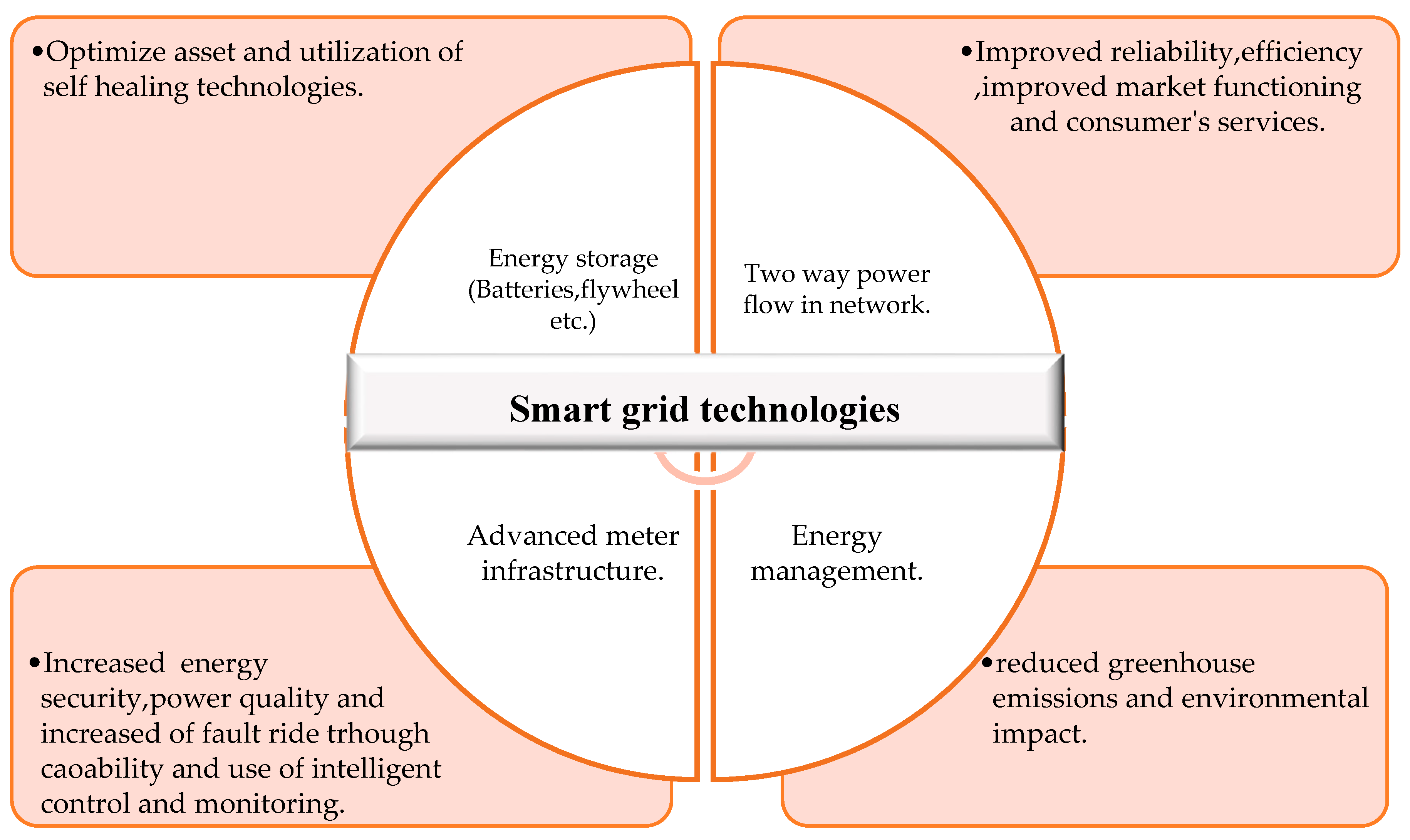
5.1. Smart Grid Technologies’ Challenges and Benefits
5.2. Dynamic Voltage Regulation Strategies
5.3. Fault Ride Through (FRT) Capability in Wind Farms
6. Analysis and Validation of the Designed Model in Software Packages
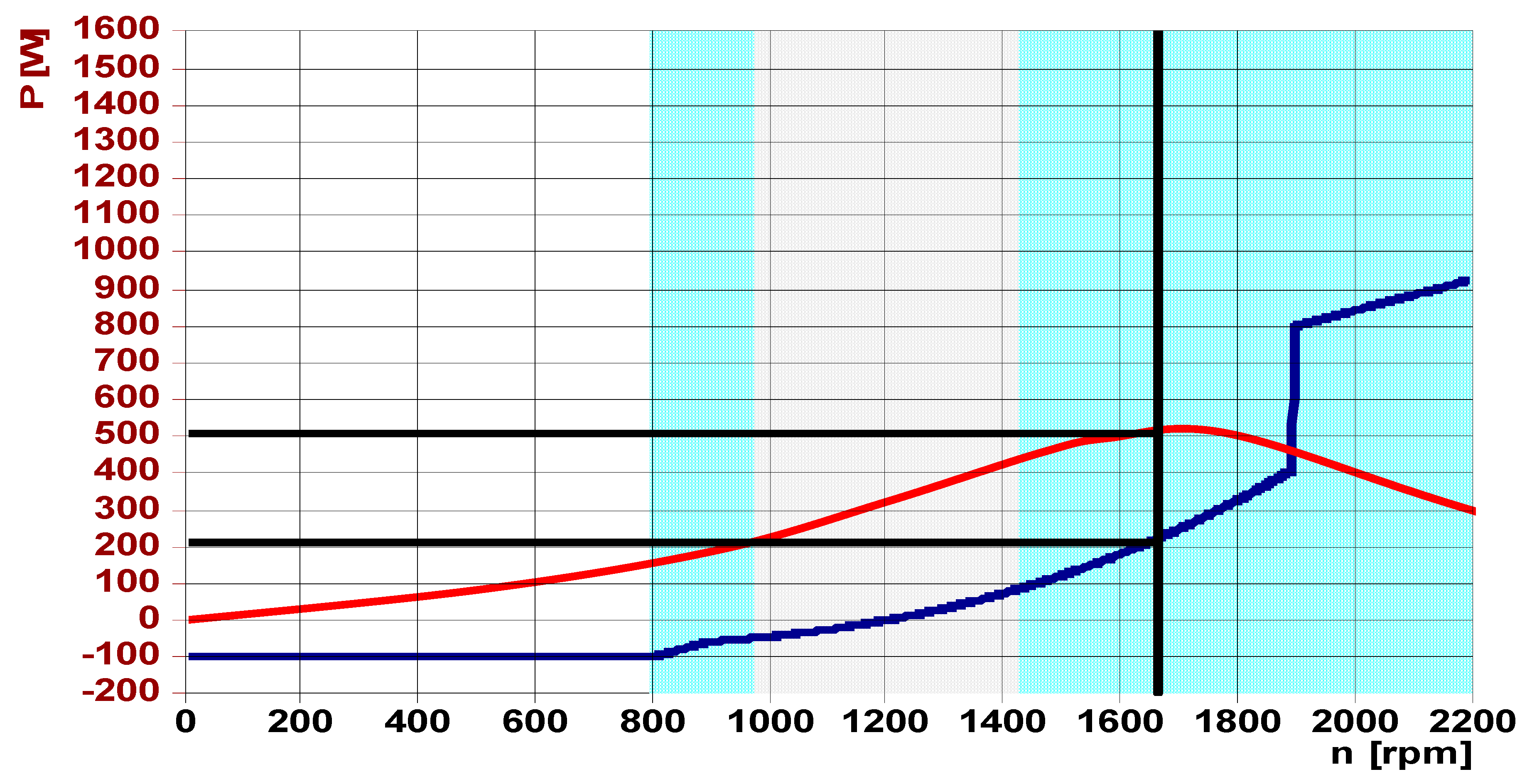
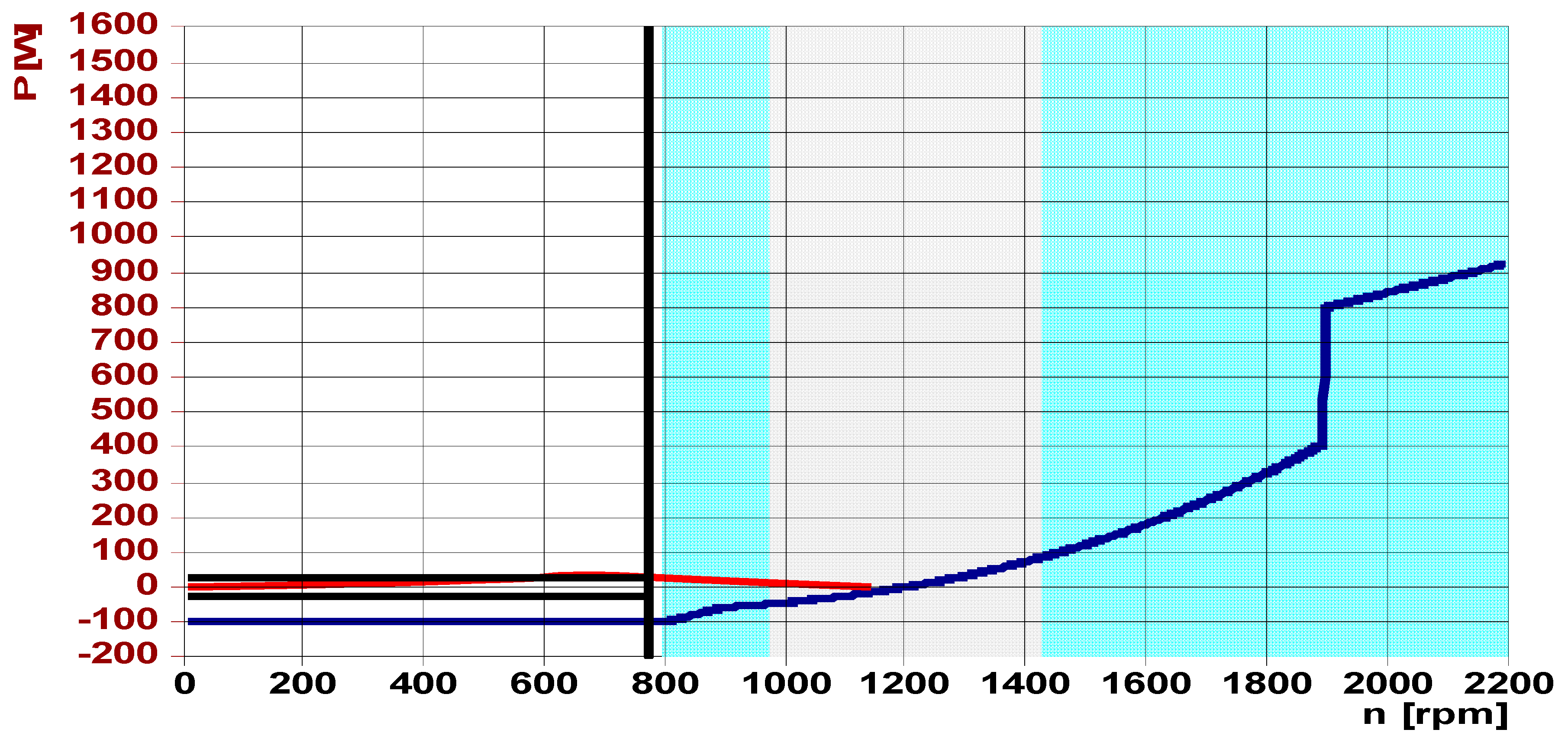
7. Results and Discussion
8. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| are the direct and quadrature () axis stator voltages | |
| represents the () axis stator currents | |
| are stator fluxes in () axis | |
| are the direct and quadrature () axis rotor voltages | |
| are the () axis rotor currents | |
| are rotor fluxes in () axis | |
| resistances of stator and rotor | |
| are the supply and rotor angular frequency | |
| are the cyclic rotor and stator inductances | |
| represents the mutual inductances. |
References
- Kawady, T.A.; Mansour, N.M.; Taalab, A.I. Wind Farm Protection Systems: State of the Art and Challenges. In Distributed Generation; Gaonkar, D.N., Ed.; Intech: Rijeka, Croatia, 2010; pp. 265–288. [Google Scholar]
- Qiu, Y.; Feng, Y.; Infield, D. Fault diagnosis of wind turbine with SCADA alarms based multidimensional information processing method. Renew. Energy 2020, 145, 1923–1931. [Google Scholar] [CrossRef]
- Pasi, M.; Salvadori, E.; Poggesi, A.; Ciolli, L.; Del Bene, A.; Marini, S.; Toschi, N.; Diciotti, S.; Mascalchi, M.; Inzitari, D.; et al. White matter microstructural damage in small vessel disease is associated with Montreal cognitive assessment but not with mini mental state examination performances: Vascular mild cognitive impairment Tuscany study. Stroke 2015, 46, 262–264. [Google Scholar] [CrossRef] [Green Version]
- Hansen, A.D.; Cutululis, N.A.; Markou, H.; Sørensen, P.E.; Iov, F. Grid Fault and Design-Sasis for Wind Turbines–Final Report; Technical University of Denmark: Roskilde, Denmark, 2010. [Google Scholar]
- Vittal, V.; McCalley, J.; Ajjarapu, V.; Shanbhag, V.U. Impact of Increased DFIG Wind Penetration on Power Systems and Markets; Final Project Report; PSERC Publication: Tempe, AZ, USA, 2009; Volume 9. [Google Scholar]
- Qiu, Y.; Feng, Y.; Tavner, P.; Richardson, P.; Erdos, G.; Chen, B. Wind turbine SCADA alarm analysis for improving reliability. Wind Energy 2012, 15, 951–966. [Google Scholar] [CrossRef]
- Yan, L.; Yongning, C.; Haiyan, T.; Xinshou, T.; Yuanzhu, C. Wind Farm Equivalent Model Based on Power Output Sensitivity of Wind Turbines. In Proceedings of the 2019 IEEE Sustainable Power and Energy Conference (iSPEC), Beijing, China, 21–23 November 2019; pp. 76–80. [Google Scholar] [CrossRef]
- Chakraborty, A.; Kumar, S.; Tudu, B.; Mandai, K.K. Analyzing the dynamic behavior of a DFIG-based wind farm under sudden grid disturbances. In Proceedings of the 2017 International Conference on Intelligent Sustainable Systems (ICISS), Palladam, Tiripur, India, 7–8 December 2017; pp. 336–341. [Google Scholar]
- Ibrahim, A.; Solomin, E.; Miroshnichenko, A. Control Strategy for Maximum Power Point Tracking of Doubly Fed Induction Motor for Wind Turbine. In Proceedings of the 2018 International Ural Conference on Green Energy (UralCon), Chelyabinsk, Russia, 4–6 October 2018; pp. 14–19. [Google Scholar]
- Dhouib, B.; Kahouli, A.; Abdallah, H.H. Dynamic behavior of grid-connected fixed speed wind turbine based on proportional-integral pitch controller and fault analysis. In Proceedings of the 2017 International Conference on Green Energy Conversion Systems (GECS), Hammamet, Tunisia, 23–25 March 2017; pp. 1–7. [Google Scholar]
- Erlich, I.; Wrede, H.; Feltes, C. Dynamic behaviour of DFIG-based wind turbines during grid faults. IEEJ Trans. Ind. Appl. 2008, 128, 396–401. [Google Scholar] [CrossRef]
- Diao, T.; Yan, Z.; Wang, L.; Liu, J.; Hou, D.; Song, N. Simulation Study on Permanent Magnet Doubly Fed Induction Generators Under Grid Voltage Dip. In Proceedings of the 2019 22nd International Conference on Electrical Machines and Systems (ICEMS), Harbin, China, 11–14 August 2019; pp. 1–5. [Google Scholar]
- Aphrodis, N.; Ntagwirumugara, E.; Vianney, B.J.M.; Mulolani, F. Design, Control and Validation of a PV System Based on Supervisory Control and Data Acquisition (SCADA) Viewer in Smartgrids. In Proceedings of the 2019 5th International Conference on Control, Automation and Robotics (ICCAR), Beijing, China, 19–22 April 2019; pp. 23–28. [Google Scholar] [CrossRef]
- Demirbaş, Ş.; Bayhan, S. Grid synchronization of doubly fed induction generator in wind power systems. In Proceedings of the 2011 International Conference on Power Engineering, Energy and Electrical Drives, Malaga, Spain, 10–12 May 2011; pp. 1–5. [Google Scholar]
- Gencer, A. Analysis of fault ride through capability improvement of the permanent magnet synchronous generator based on WT using a BFCL. In Proceedings of the 2019 1st Global Power, Energy and Communication Conference (GPECOM), Nevsehir, Turkey, 12–15 June 2019; pp. 353–357. [Google Scholar]
- Boujoudi, B.; Kheddioui, E.; Machkour, N.; Achalhi, A.; Bezza, M. Comparative study between different types of control of the wind turbine in case of voltage dips. In Proceedings of the 2018 Renewable Energies, Power Systems & Green Inclusive Economy (REPS-GIE), Casablanca, Morocco, 23–24 April 2018; pp. 1–5. [Google Scholar]
- Boujoudi, B.; Machkour, N.; Kheddioui, E. New method for detection and characterization of voltage dips. Mol. Cryst. Liq. Cryst. 2016, 641, 86–94. [Google Scholar] [CrossRef]
- Santos-Martin, D.; Rodriguez-Amenedo, J.L.; Arnalte, S. Direct power control applied to doubly fed induction generator under unbalanced grid voltage conditions. IEEE Trans. Power Electron. 2008, 23, 2328–2336. [Google Scholar] [CrossRef]
- Shao, H.; Cai, X.; Li, Z.; Zhou, D.; Sun, S.; Guo, L.; Rao, F. Stability Enhancement and Direct Speed Control of DFIG Inertia Emulation Control Strategy. IEEE Access 2019, 7, 120089–120105. [Google Scholar] [CrossRef]
- He, L.; Hao, L.; Qiao, W. Remote Monitoring and Diagnostics of Pitch Bearing Defects in a MW-Scale Wind Turbine Using Pitch Symmetrical-component Analysis. In Proceedings of the 2019 IEEE Energy Conversion Congress and Exposition (ECCE), Baltimore, MA, USA, 29 September–3 October 2019; pp. 1–6. [Google Scholar]
- Chen, S.Z.; Cheung, N.C.; Wong, K.C.; Wu, J. Grid synchronization of doubly-fed induction generator using integral variable structure control. IEEE Trans. Energy Convers. 2009, 24, 875–883. [Google Scholar] [CrossRef]
- Fan, L.; Yuvarajan, S. Modeling and slip control of a doubly fed induction wind turbine generator. In Proceedings of the 2008 40th North. American Power Symposium, Calgary, AB, Canada, 28–30 September 2008; pp. 1–6. [Google Scholar]
- Fan, L.; Miao, Z.; Yuvarajan, S.; Glower, J. A comparison of slip control, FMA control and vector control in DFIG converter. In Proceedings of the 2008 34th Annual Conference of IEEE Industrial Electronics, Orlando, FL, USA, 10–13 November 2008; pp. 2075–2081. [Google Scholar]
- Ren, Q.; Liu, H.; Li, Q.; He, J.; Xu, B.; Yuan, X. A Novel Inertia Control Strategy for DFIG Wind Turbines Based on Slip Feedback. In Proceedings of the 2017 IEEE 7th Annual International Conference on CYBER Technology in Automation, Control., and Intelligent Systems (CYBER), Sheraton Princess Kaiulani, HI, USA, 31 July–4 August 2017; pp. 668–672. [Google Scholar]
- Abdou, E.H.; Youssef, A.R.; Kamel, S.; Aly, M.M. Sensorless Wind Speed Control of 1.5 MW DFIG Wind Turbines for MPPT. In Proceedings of the 2018 Twentieth International Middle East. Power Systems Conference (MEPCON), Cairo, Egypt, 18–20 December 2018; pp. 700–704. [Google Scholar]
- Ouyang, J.; Tang, T.; Yao, J.; Li, M. Active Voltage Control for DFIG-Based Wind Farm Integrated Power System by Coordinating Active and Reactive Powers Under Wind Speed Variations. IEEE Trans. Energy Convers. 2019, 34, 1504–1511. [Google Scholar] [CrossRef]
- Kairous, D.; Wamkeue, R.; Belmadani, B. Advanced control of variable speed wind energy conversion system with DFIG. In Proceedings of the 2010 9th International Conference on Environment and Electrical Engineering, Prague, Czech Republic, 16–19 May 2010; pp. 41–44. [Google Scholar]
- Zhou, J.; He, L.; Li, C.; Cao, Y.; Liu, X.; Geng, Y. What’s the difference between traditional power grid and smart grid from dispatching perspective. In Proceedings of the 2013 IEEE PES Asia-Pacific Power and Energy Engineering Conference (APPEEC), Kowloon, Hong Kong, China, 8–11 December 2013; pp. 1–6. [Google Scholar]
- Dessouky, S.S. Investigation of Multi-terminal Voltage Source Converter HVDC for Wind Power Integration A THESIS. Ph.D. Thesis, Port-said University, Port Said, Egypt, 2016. [Google Scholar]
- Miller, J. The smart grid-benefits and challenges. In Proceedings of the EEI Annual Convention, Toronto, ON, Canada, 16 June 2008. [Google Scholar]
- Mulyono, N.B. User behavior assessment of household electric usage. Asian J. Technol. Manag. 2013, 6, 65–71. [Google Scholar] [CrossRef]
- Rahman, M.G.; Chowdhury, M.F.B.R.; Al Mamun, M.A.; Hasan, M.R.; Mahfuz, S. Summary of smart grid: Benefits and issues. Int. J. Sci. Eng. Res. 2013, 4, 1–5. [Google Scholar]
- Engleitner, R.; Nied, A.; Cavalca, M.S.M.; da Costa, J.P. Dynamic analysis of small wind turbines frequency support capability in a low-power wind-diesel microgrid. IEEE Trans. Ind. Appl. 2017, 54, 102–111. [Google Scholar] [CrossRef]
- Venkatesh, B.; Rost, A.; Chang, L. Dynamic voltage collapse index—Wind generator application. IEEE Trans. Pow. Deliv. 2006, 22, 90–94. [Google Scholar] [CrossRef]
- Engleitner, R.; Nied, A.; Cavalca, M.S.M.; da Costa, J.P. Small wind turbine operating points and their effect on the DC-link control for frequency support on low power microgrids with high wind penetration. In Proceedings of the 2016 12th IEEE International Conference on Industry Applications (INDUSCON), Curitiba, Brazil, 20–23 November 2016; pp. 1–8. [Google Scholar]
- Pratap, B.; Singh, N.; Kumar, V. Robust control of variable speed wind turbine using quasi-sliding mode approach. Proc. Comp. Sci. 2018, 125, 398–404. [Google Scholar] [CrossRef]
- Singh, N.; Pratap, B.; Swarup, A. Design of robust control for wind turbine using quantitative feedback theory. IFAC-PapersOnLine 2016, 49, 718–723. [Google Scholar] [CrossRef]
- Kim, C.K.; Sood, V.K.; Jang, G.S.; Lim, S.J.; Lee, S.J. HVDC Transmission: Power Conversion Applications in Power Systems; John Wiley & Sons: Clementi Loop, Singapore, 2009. [Google Scholar]
- Silva, B.M.A. Multi-terminal HVDC grids: Control Strategies for Ancillary Services Provision in Interconnected Transmission Systems with Offshore Wind Farms. Ph.D. Thesis, Faculty of Engineering, University of Porto, Porto, Portugal, 2014. [Google Scholar]
- Deng, F.; Chen, Z. An offshore wind farm with DC grid connection and its performance under power system transients. In Proceedings of the 2011 IEEE Power and Energy Society General Meeting, Detroit, MI, USA, 24–28 July 2011; pp. 1–8. [Google Scholar]
- Bell, K.; Cirio, D.; Denis, A.M.; He, L.; Liu, C.C.; Migliavacca, G.; Panciatici, P. Economic and technical criteria for designing future off-shore HVDC grids. In Proceedings of the 2010 IEEE PES Innovative Smart Grid Technologies Conference Europe (ISGT Europe), Gothenburg, Sweden, 11–13 October 2010; pp. 1–8. [Google Scholar]
- Kirby, N.M.; Luckett, M.J.; Xu, L.; Siepmann, W. HVDC transmission for large offshore windfarms. In Proceedings of the Seventh International Conference on AC and DC Transmission, London, UK, 28–30 November 2001; pp. 162–168. [Google Scholar]
- Liang, J.; Jing, T.; Gomis-Bellmunt, O.; Ekanayake, J.; Jenkins, N. Operation and control of multiterminal HVDC transmission for offshore wind farms. IEEE Trans. Power Deliv. 2011, 26, 2596–2604. [Google Scholar] [CrossRef]
- Gomis-Bellmunt, O.; Liang, J.; Ekanayake, J.; King, R.; Jenkins, N. Topologies of multiterminal HVDC-VSC transmission for large offshore wind farms. Electr. Power Syst. Res. 2011, 81, 271–281. [Google Scholar] [CrossRef]
- Gomis-Bellmunt, O.; Liang, J.; Ekanayake, J.; Jenkins, N. Voltage–current characteristics of multiterminal HVDC-VSC for offshore wind farms. Electr. Power Syst. Res. 2011, 81, 440–450. [Google Scholar] [CrossRef]
- Gomis-Bellmunt, O.; Egea-Alvarez, A.; Junyent-Ferré, A.; Liang, J.; Ekanayake, J.; Jenkins, N. Multiterminal HVDC-VSC for offshore wind power integration. In Proceedings of the 2011 IEEE Power and Energy Society General Meeting, Detroit, MI, USA, 24–28 July 2011; pp. 1–6. [Google Scholar]
- Wang, C.; Yang, P.; Chen, R.; Cheng, S.; Tian, T.; Li, X. Hierarchical voltage imbalance control for single-/three-phase hybrid multimicrogrid. IET Gen. Transm. Distrib. 2019, 13, 4233–4241. [Google Scholar] [CrossRef]
- Nduwamungu, A. Review on the Coordination and Energy Management of Microgrids Broad Based on PQ Controller and Droop Control. Some Useful Information Is Given in This Paper. Open Access Libr. J. 2017, 4, 1. [Google Scholar] [CrossRef]
- He, X.; Fang, X.; Yu, J. Distributed Energy Management Strategy for Reaching Cost-Driven Optimal Operation Integrated with Wind Forecasting in Multimicrogrids System. IEEE Trans. Syst. Man, Cyber. Syst. 2019, 49, 1643–1651. [Google Scholar] [CrossRef]
- Chiu, W.Y.; Sun, H.; Poor, H.V. A multiobjective approach to multimicrogrid system design. IEEE Trans. Smart Grid 2015, 6, 2263–2272. [Google Scholar] [CrossRef] [Green Version]



























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Traditional Grid Technologies | Smart Grid Technologies |
|---|---|
| Few sensors in the network | Sensors all over the network |
| Electromechanical systems | Digital system |
| Few customer choices | Many customer choices |
| Limited control strategies | Pervasive control strategies |
| Failures and blackouts issues | Adaptive and islanding mode |
| Manual restoration capability | Self-healing capability |
| Centralized generation | Distributed generation |
| One way communication technologies | Two way communication technologies |
| Manual monitoring | Remote self-monitoring |
| N [rpm] | M [Nm] | Speed [m/s] | Voltage Sag [Volts] | ||||
|---|---|---|---|---|---|---|---|
| 1902 | 6 | 1201 | 675 | 47 | 750 | 12.5 | 0% |
| 1897 | 4.8 | 915 | 501 | 14 | 520 | 10.5 | 20% |
| 1667 | 3 | 530 | 274 | −62 | 212 | 8.5 | 40% |
| 1378 | 2 | 297 | 161 | −100 | 61 | 7 | 60% |
| 1281 | 1.8 | 239 | 127 | −104 | 22 | 6.5 | 100% |
| 1038 | 1.1 | 127 | 56 | −108 | −53 | 5.2 | 100% |
| 911 | 0.9 | 80 | 25 | −102 | −80 | 4.5 | 100% |
| 756 | 0.4 | 37 | 0 | −2 | −25 | 3.4 | 100% |
| 1897 | 4.8 | 915 | 501 | 14 | 520 | 10.5 | 20% |
| 1667 | 3 | 530 | 274 | −62 | 212 | 8.5 | 40% |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Nduwamungu, A.; Ntagwirumugara, E.; Mulolani, F.; Bashir, W. Fault Ride through Capability Analysis (FRT) in Wind Power Plants with Doubly Fed Induction Generators for Smart Grid Technologies. Energies 2020, 13, 4260. https://doi.org/10.3390/en13164260
Nduwamungu A, Ntagwirumugara E, Mulolani F, Bashir W. Fault Ride through Capability Analysis (FRT) in Wind Power Plants with Doubly Fed Induction Generators for Smart Grid Technologies. Energies. 2020; 13(16):4260. https://doi.org/10.3390/en13164260
Chicago/Turabian StyleNduwamungu, Aphrodis, Etienne Ntagwirumugara, Francis Mulolani, and Waqar Bashir. 2020. "Fault Ride through Capability Analysis (FRT) in Wind Power Plants with Doubly Fed Induction Generators for Smart Grid Technologies" Energies 13, no. 16: 4260. https://doi.org/10.3390/en13164260
APA StyleNduwamungu, A., Ntagwirumugara, E., Mulolani, F., & Bashir, W. (2020). Fault Ride through Capability Analysis (FRT) in Wind Power Plants with Doubly Fed Induction Generators for Smart Grid Technologies. Energies, 13(16), 4260. https://doi.org/10.3390/en13164260