A Photovoltaic-Fed Z-Source Inverter Motor Drive with Fault-Tolerant Capability for Rural Irrigation




Abstract
:
1. Introduction
- Design and implementation of a complete efficient irrigation system using a high gain single-stage power conversion, Z-source inverter (ZSI) and a PV system. With the proposed modulation strategy, the ZSI can use higher modulation index with lower voltage stress across the switching devices as compared to the existed noncoupled impedance networks.
- Develop a fast fault-tolerant control algorithm and control measures to facilitate continuous operation during the event of a fault. The fault-diagnosis is achieved effectively within 20 ms while maintaining nearly rated power during post-fault operation.
- Analyze the performance parameters of the proposed system to verify its compatibility for irrigation applications.
2. System Design Specifications
2.1. Selection of PV Array Parameters
2.2. Z-Source Network
2.3. Specifications of Motor-Pump Arrangement
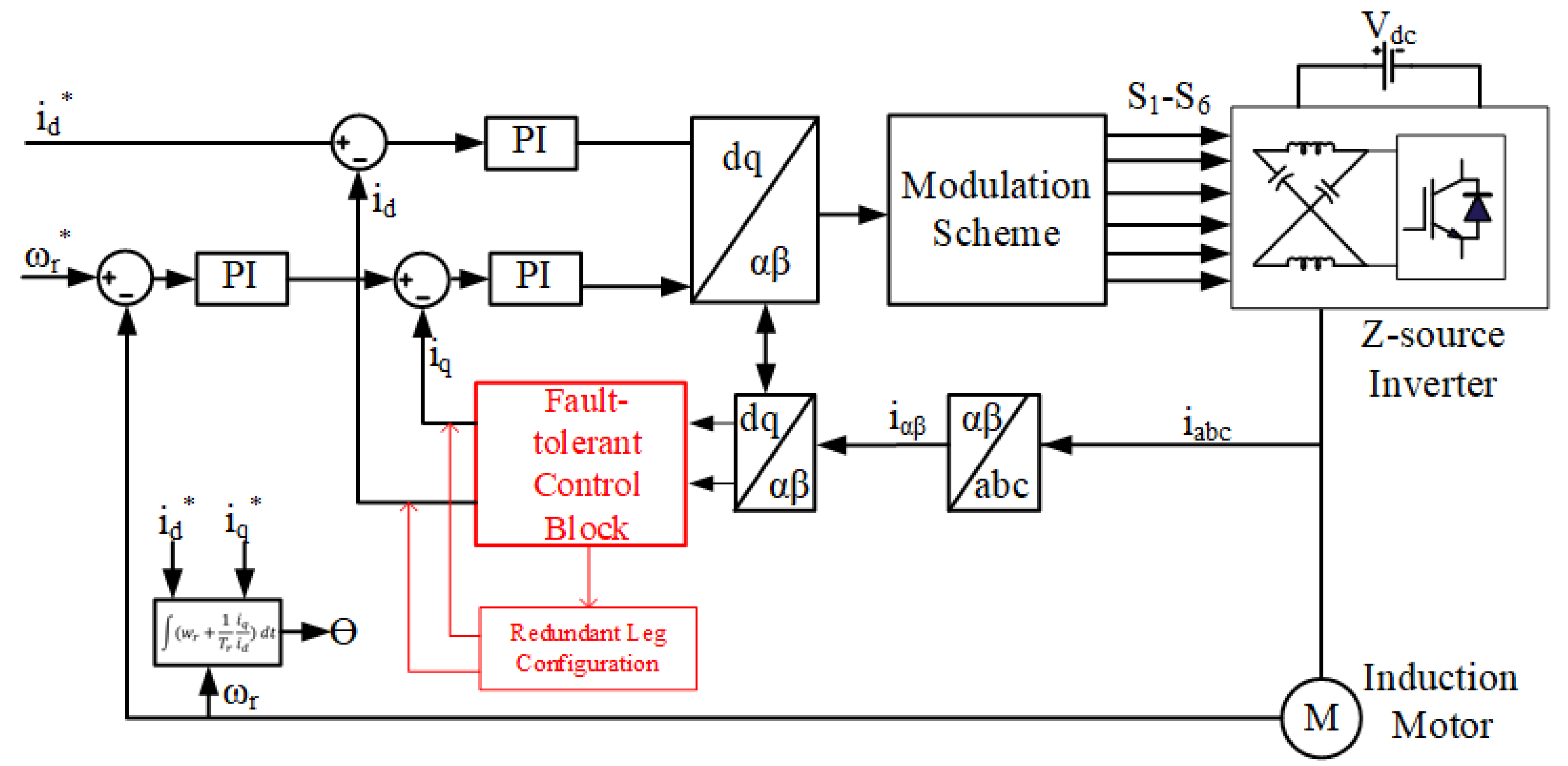
3. Proposed Fault-Tolerant Strategy
- (a)
- Fault detection and localization
- (b)
- Fault-compensation for post-fault operation
3.1. Fault Detection and Localization
3.1.1. Open-Circuit Fault Detection
3.1.2. Short-Circuit Fault Detection
3.2. Fault Compensation
4. Results and Discussion
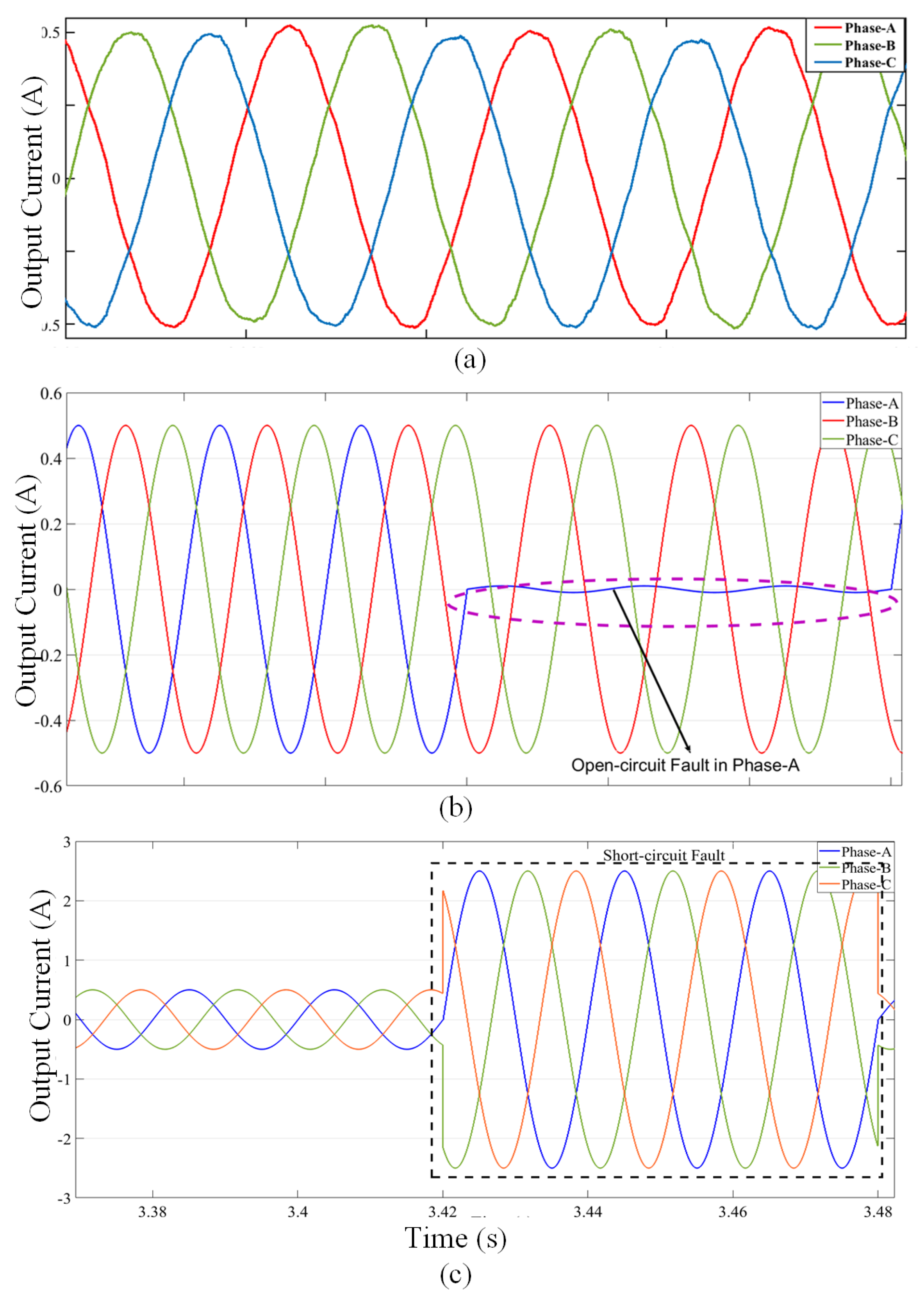
4.1. Normal Operation
4.2. Faulty Operation
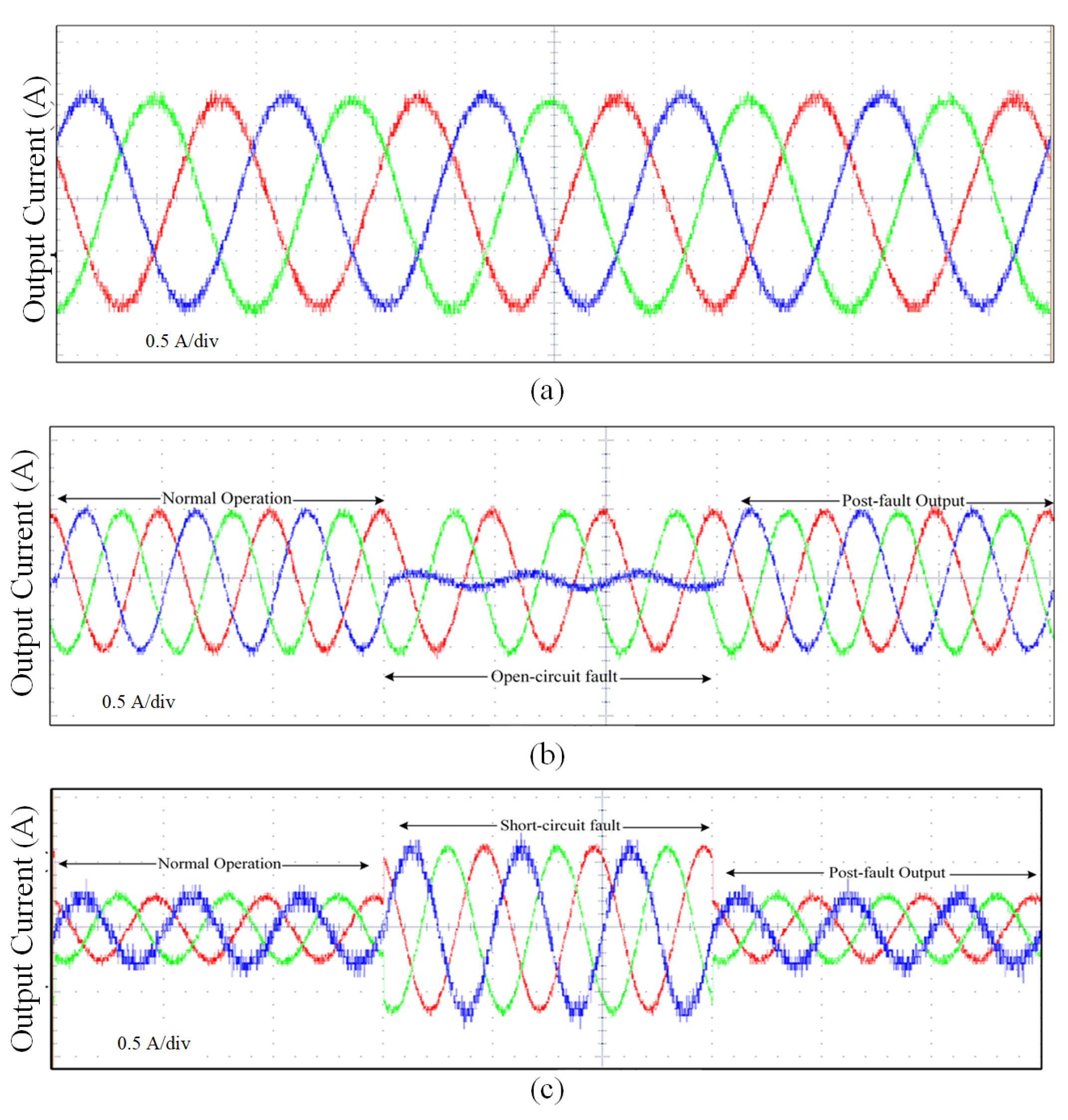
4.2.1. Case 1: Open-Circuit Switch Fault
4.2.2. Case 2: Short-Circuit Switch Fault
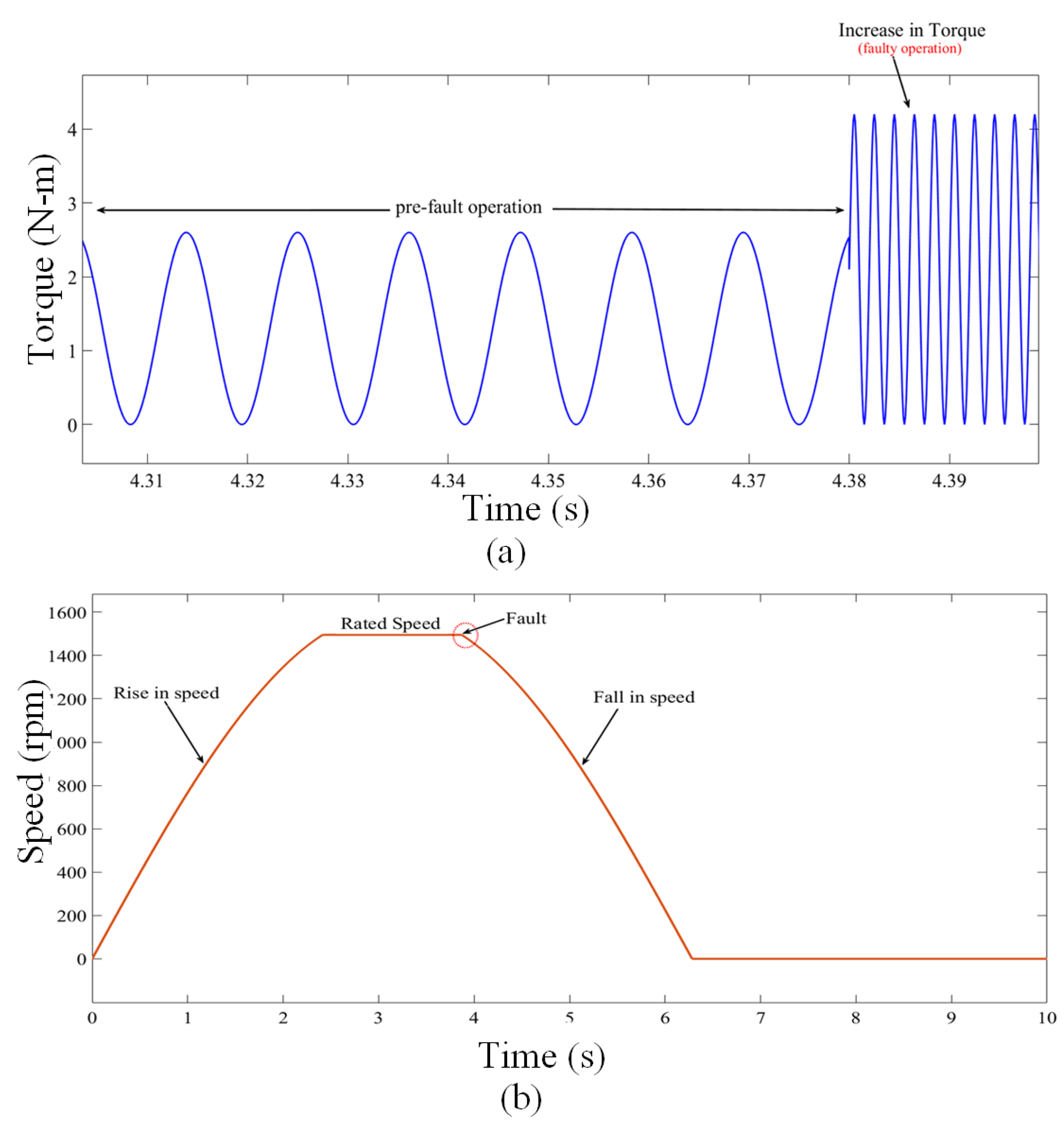
4.2.3. Case 3: Motor Performance
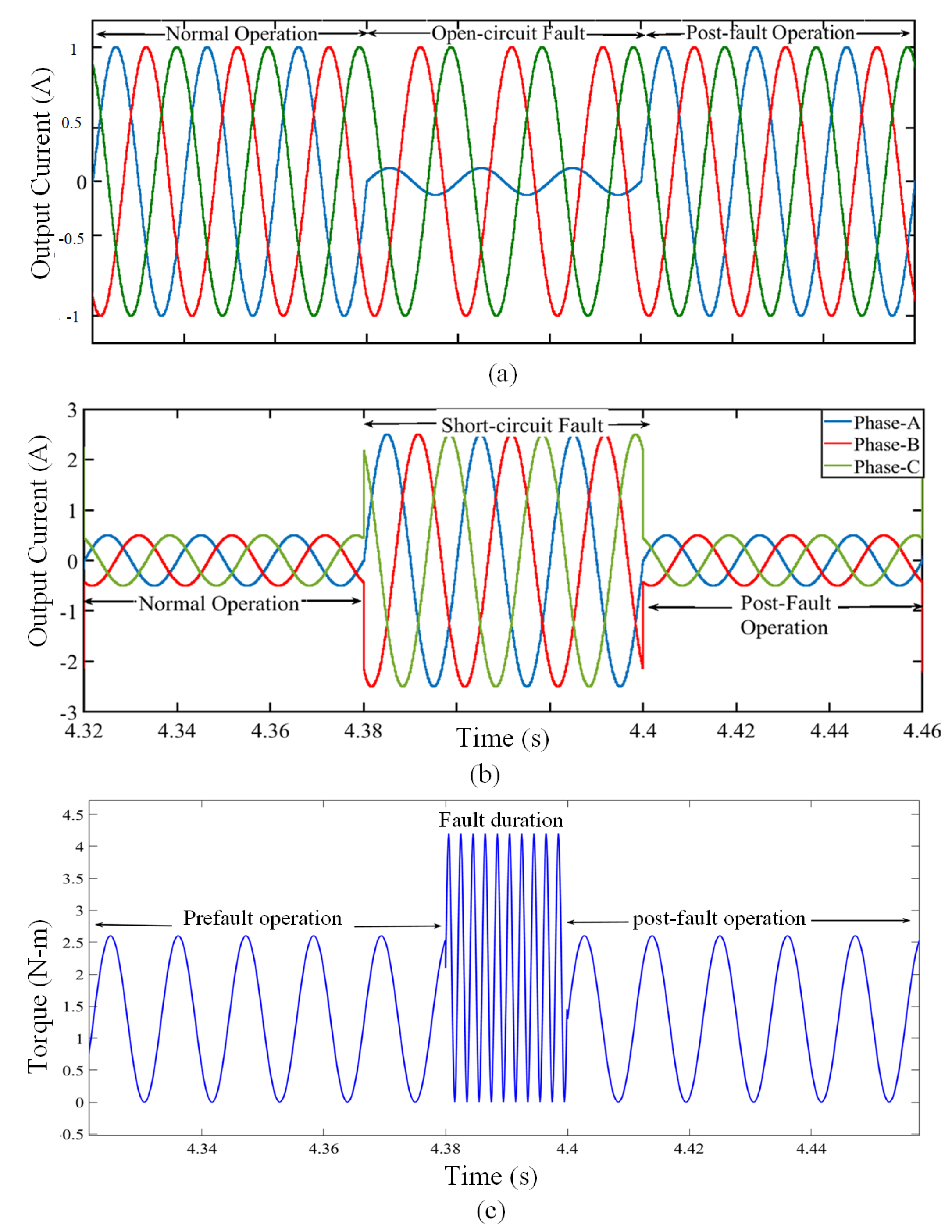
4.3. Post-Fault Operation
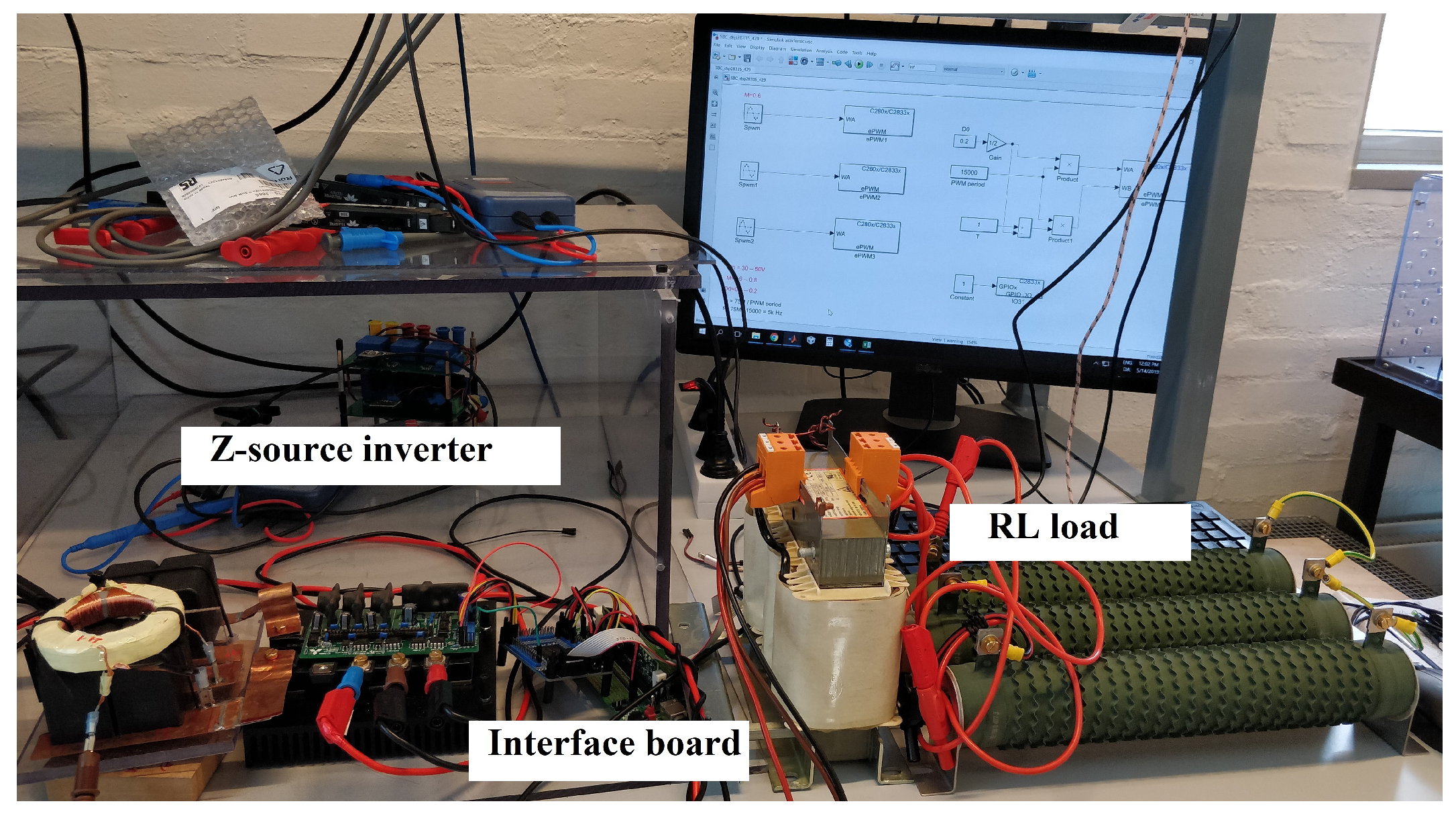
5. Experimental Results
5.1. Normal Operation
5.2. Fault-Tolerant Operation
6. Compatibility of Proposed System for Irrigation Application
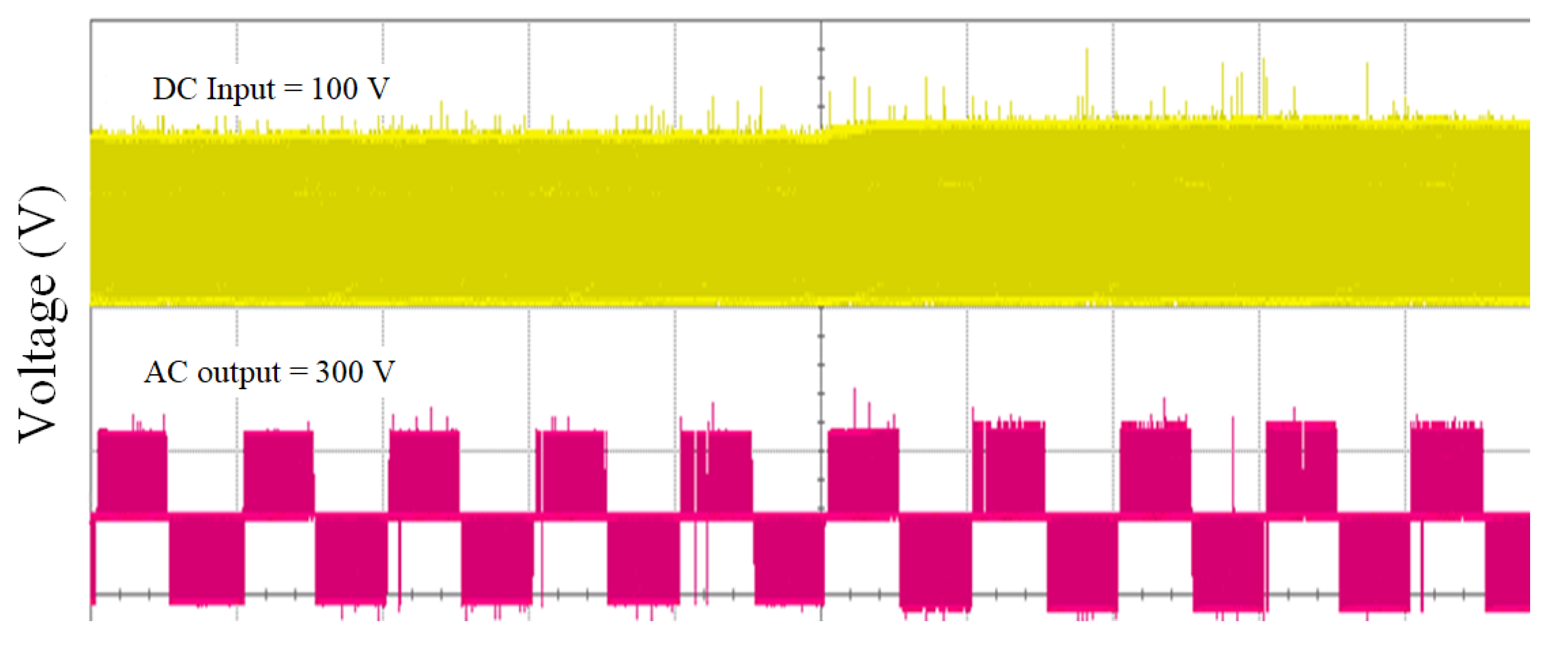
6.1. Voltage Gain
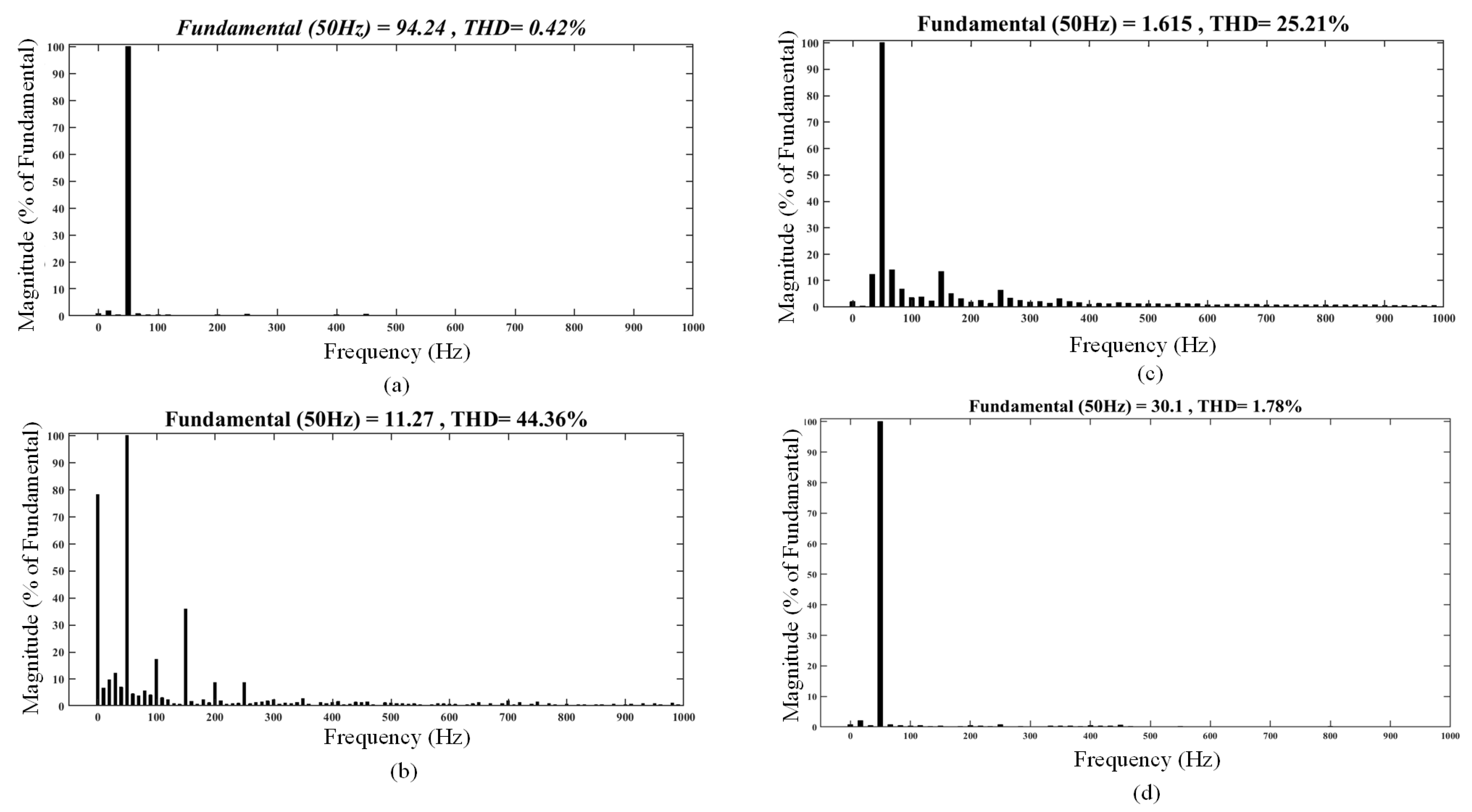
6.2. Harmonic Response
6.3. Motor Performance
7. Conclusions
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| PWM | Pulse width modulation |
| IGBT | Insulated gate bipolar transistor |
| THD | Total harmonic distortion |
| PV | Photo-voltaic |
| ZSI | Impedance source inverter |
| VSI | Voltage source inverter |
| FTC | Fault-tolerant Control |
| CCM | Continuous conduction mode |
| IC | Integrated Circuit |
| MPP | Maximum Power Point |
References
- Coelho, B.; Andrade-Campos, A. Efficiency achievement in water supply systems—A review. Renew. Sustain. Energy Rev. 2014, 30, 59–84. [Google Scholar] [CrossRef]
- Kavya Santhoshi, B.; Mohana Sundaram, K.; Padmanaban, S.; Holm-Nielsen, J.B.; KK, P. Critical Review of PV Grid-Tied Inverters. Energies 2019, 12, 1921. [Google Scholar] [CrossRef] [Green Version]
- Ahmed, T.; Soon, T.; Mekhilef, S. A Single Phase Doubly Grounded Semi-Z-Source Inverter for Photovoltaic (PV) Systems with Maximum Power Point Tracking (MPPT). Energies 2014, 7, 3618–3641. [Google Scholar] [CrossRef] [Green Version]
- Sharma, V.; Panwar, C. Comparative analysis of PV FED DC-DC converters. In Proceedings of the 2014 International Conference on Green Computing Communication and Electrical Engineering (ICGCCEE), Coimbatore, India, 6–8 March 2014; pp. 1–4. [Google Scholar] [CrossRef]
- Peng, F.Z. Z-source inverter. IEEE Trans. Ind. Appl. 2003, 39, 504–510. [Google Scholar] [CrossRef]
- Cao, D.; Jiang, S.; Yu, X.; Peng, F.Z. Low-Cost Semi-Z-source Inverter for Single-Phase Photovoltaic Systems. IEEE Trans. Power Electron. 2011, 26, 3514–3523. [Google Scholar] [CrossRef]
- Peng, F.Z.; Joseph, A.; Wang, J.; Shen, M.; Chen, L.; Pan, Z.; Ortiz-Rivera, E.; Huang, Y. Z-source inverter for motor drives. IEEE Trans. Power Electron. 2005, 20, 857–863. [Google Scholar] [CrossRef]
- Hossameldin, A.A.; Abdelsalam, A.K.; Ibrahim, A.A.; Williams, B.W. Enhanced Performance Modified Discontinuous PWM Technique for Three-Phase Z-Source Inverter. Energies 2020, 13, 578. [Google Scholar] [CrossRef] [Green Version]
- Chen, X.; Fu, Q.; Infield, D.G. PV grid-connected power conditioning system with Z-source network. In Proceedings of the 2009 International Conference on Sustainable Power Generation and Supply, Nanjing, China, 6–7 April 2009; pp. 1–6. [Google Scholar] [CrossRef]
- Sun, D.; Ge, B.; Yan, X.; Bi, D.; Zhang, H.; Liu, Y.; Abu-Rub, H.; Ben-Brahim, L.; Peng, F.Z. Modeling, Impedance Design, and Efficiency Analysis of Quasi- Z Source Module in Cascaded Multilevel Photovoltaic Power System. IEEE Trans. Ind. Electron. 2014, 61, 6108–6117. [Google Scholar] [CrossRef]
- Belila, A.; Berkouk, E.M.; Benbouzid, M.; Amirat, Y.; Tabbache, B.; Mamoune, A. Control methodology and implementation of a Z-source inverter for a stand-alone photovoltaic-diesel generator-energy storage system microgrid. Electr. Power Syst. Res. 2020, 185, 106385. [Google Scholar] [CrossRef]
- Douida, S.; Tabbache, B.; Benbouzid, M. Direct Torque Control Based on Shoot-Through States of an Induction Motor Fed by a Z-Source Three-Level Neutral Point Clamped Inverter. IETE J. Res. 2019, 1–9. [Google Scholar] [CrossRef]
- Sharma, V.; Mukhopadhyay, S.; Hossain, M.J.; Nawazish Ali, S.M.; Kashif, M. A-source Inverter-fed PMSM drive with fault-tolerant capability for Electric Vehicles. In Proceedings of the 2020 IEEE 29th International Symposium on Industrial Electronics (ISIE), Kyoto, Japan, 20–23 June 2020; pp. 241–246. [Google Scholar]
- Sharma, V.; Hossain, M.J.; Ali, S.M.N.; Kashif, M.; Fernandez, E. Design and Implementation of Trans-Z-Source Inverter-Fed Induction Motor Drive with Fault-Tolerant Capability. In Proceedings of the 2020 IEEE Applied Power Electronics Conference and Exposition (APEC), New Orleans, LA, USA, 15–19 March 2020; pp. 690–695. [Google Scholar]
- Negi, B.; Sharma, V.; Bhatt, A.; Yadav, P. Effect of Faults on Power Electronic Devices for ZSI-Fed Induction Motor Drive System. In Proceeding of International Conference on Intelligent Communication, Control and Devices; Singh, R., Choudhury, S., Eds.; Springer: Singapore, 2017; pp. 747–752. [Google Scholar]
- de Araujo Ribeiro, R.L.; Jacobina, C.B.; da Silva, E.R.C.; Lima, A.M.N. Fault-tolerant voltage-fed PWM inverter AC motor drive systems. IEEE Trans. Ind. Electron. 2004, 51, 439–446. [Google Scholar] [CrossRef]
- Farhadi, M.; Fard, M.T.; Abapour, M.; Hagh, M.T. DC–AC Converter-Fed Induction Motor Drive with Fault-Tolerant Capability under Open- and Short-Circuit Switch Failures. IEEE Trans. Power Electron. 2018, 33, 1609–1621. [Google Scholar] [CrossRef] [Green Version]
- Karimi, S.; Poure, P.; Saadate, S. Fast power switch failure detection for fault tolerant voltage source inverters using FPGA. IET Power Electron. 2009, 2, 346–354. [Google Scholar] [CrossRef]
- Tousizadeh, M.; Che, H.S.; Selvaraj, J.; Rahim, N.A.; Ooi, B. Performance Comparison of Fault-Tolerant Three-Phase Induction Motor Drives Considering Current and Voltage Limits. IEEE Trans. Ind. Electron. 2019, 66, 2639–2648. [Google Scholar] [CrossRef]
- Jiang, X.; Xu, D.; Gu, L.; Li, Q.; Xu, B.; Li, Y. Short-Circuit Fault-Tolerant Operation of Dual-Winding Permanent-Magnet Motor under the Four-Quadrant Condition. IEEE Trans. Ind. Electron. 2019, 66, 6789–6798. [Google Scholar] [CrossRef]
- Tousizadeh, M.; Che, H.S.; Selvaraj, J.; Rahim, N.A.; Ooi, B. Fault-Tolerant Field-Oriented Control of Three-Phase Induction Motor Based on Unified Feedforward Method. IEEE Trans. Power Electron. 2019, 34, 7172–7183. [Google Scholar] [CrossRef]
- Beltrao de Rossiter Correa, M.; Brandao Jacobina, C.; Cabral da Silva, E.R.; Nogueira Lima, A.M. An induction motor drive system with improved fault tolerance. IEEE Trans. Ind. Appl. 2001, 37, 873–879. [Google Scholar] [CrossRef]
- Kastha, D.; Bose, B.K. Investigation of fault modes of voltage-fed inverter system for induction motor drive. IEEE Trans. Ind. Appl. 1994, 30, 1028–1038. [Google Scholar] [CrossRef]
- Li, Q.; Jiang, X.; Huang, W.; Cao, R. Fault-tolerant drive system based on the redundancy bridge arm for aerospace applications. IET Electric Power Appl. 2018, 12, 780–786. [Google Scholar] [CrossRef]
- Zhang, J.; Zhang, Z.; Yu, L.; Bian, Z. Fault-tolerant control of DSBLDC motor drive under open-circuit faults. IET Electr. Power Appl. 2019, 13, 494–502. [Google Scholar] [CrossRef]
- Han, G.; Chen, H.; Shi, X. Modelling, diagnosis, and tolerant control of phase-to-phase fault in switched reluctance machine. IET Electric Power Appl. 2017, 11, 1527–1537. [Google Scholar] [CrossRef]
- Wang, B.; Li, Z.; Bai, Z.; Krein, P.T.; Ma, H. A Redundant Unit to Form T-Type Three-Level Inverters Tolerant of IGBT Open-Circuit Faults in Multiple Legs. IEEE Trans. Power Electron. 2020, 35, 924–939. [Google Scholar] [CrossRef]
- Zhang, J.; Zhan, W.; Ehsani, M. Fault-Tolerant Control of PMSM with Inter-Turn Short-Circuit Fault. IEEE Trans. Energy Conver. 2019, 34, 2267–2275. [Google Scholar] [CrossRef]
- Zhang, W.; Xu, D.; Enjeti, P.N.; Li, H.; Hawke, J.T.; Krishnamoorthy, H.S. Survey on Fault-Tolerant Techniques for Power Electronic Converters. IEEE Trans. Power Electron. 2014, 29, 6319–6331. [Google Scholar] [CrossRef]
- Mirafzal, B. Survey of Fault-Tolerance Techniques for Three-Phase Voltage Source Inverters. IEEE Trans. Ind. Electron. 2014, 61, 5192–5202. [Google Scholar] [CrossRef]
- Li, S.; Xu, L. Strategies of fault tolerant operation for three-level PWM inverters. IEEE Trans. Power Electron. 2006, 21, 933–940. [Google Scholar] [CrossRef]
- Campos-Delgado, D.U.; Espinoza-Trejo, D.R.; Palacios, E. Fault-tolerant control in variable speed drives: A survey. IET Electr. Power Appl. 2008, 2, 121–134. [Google Scholar] [CrossRef]
- Pillai, D.S.; Blaabjerg, F.; Rajasekar, N. A Comparative Evaluation of Advanced Fault Detection Approaches for PV Systems. IEEE J. Photovoltaics 2019, 9, 513–527. [Google Scholar] [CrossRef]
- Saied, M.M.; Hanafy, A.A.; El-Gabaly, M.A.; Safar, Y.A.; Jaboori, M.G.; Yamin, K.A.; Sharaf, A.M. Optimal design parameters for a PV array coupled to a DC motor via a DC-DC transformer. IEEE Trans. Energy Conv. 1991, 6, 593–598. [Google Scholar] [CrossRef]
- Villalva, M.G.; Siqueira, T.G.D.; Ruppert, E. Voltage regulation of photovoltaic arrays: Small-signal analysis and control design. IET Power Electron. 2010, 3, 869–880. [Google Scholar] [CrossRef]
- Yang, B.; Li, W.; Zhao, Y.; He, X. Design and Analysis of a Grid-Connected Photovoltaic Power System. IEEE Trans. Power Electron. 2010, 25, 992–1000. [Google Scholar] [CrossRef]
- Hosseinzadeh, M.; Rajaei Salmasi, F. Determination of maximum solar power under shading and converter faults—A prerequisite for failure-tolerant power management systems. Simul. Model. Pract. Theory 2016, 62, 14–30. [Google Scholar] [CrossRef]
- Huang, Y.; Shen, M.; Peng, F.Z.; Wang, J. Z-Source Inverter for Residential Photovoltaic Systems. IEEE Trans. Power Electron. 2006, 21, 1776–1782. [Google Scholar] [CrossRef]
- Lu, B.; Sharma, S.K. A Literature Review of IGBT Fault Diagnostic and Protection Methods for Power Inverters. IEEE Trans. Ind. Appl. 2009, 45, 1770–1777. [Google Scholar] [CrossRef]
- Chahmi, A.; Bendjebbar, M.; Raison, B. Fault detection In electrical drives-approach signal. In Proceedings of the 2014 International Conference on Electrical Sciences and Technologies in Maghreb (CISTEM), Tunis, Tunisia, 3–6 November 2014; pp. 1–6. [Google Scholar] [CrossRef] [Green Version]
- Rodríguez-Blanco, M.A.; Vázquez-Pérez, A.; Hernández-González, L.; Golikov, V.; Aguayo-Alquicira, J.; May-Alarcón, M. Fault Detection for IGBT Using Adaptive Thresholds during the Turn-on Transient. IEEE Trans. Ind. Electron. 2015, 62, 1975–1983. [Google Scholar] [CrossRef]
- Tomar, A.; Mishra, S.; Bhende, C.N. AOMH–MISO Based PV–VCI Irrigation System Using ASCIM Pump. IEEE Trans. Ind. Appl. 2018, 54, 4813–4824. [Google Scholar] [CrossRef]
- Varshney, A.; Sharma, U.; Singh, B. Self-regulated DC-link control of synchronous reluctance motor-driven solar water pumping system. IET Power Electron. 2019, 12, 3220–3230. [Google Scholar] [CrossRef]
- Kumar, R.; Singh, B. Solar PV powered BLDC motor drive for water pumping using Cuk converter. IET Electr. Power Appl. 2017, 11, 222–232. [Google Scholar] [CrossRef]
- Koreboina, V.B.; Narasimharaju, B.L.; Vinod Kumar, D.M. Performance investigation of simplified PWM MPPT approach for direct PV-fed switched reluctance motor in water pumping system. IET Electr. Power Appl. 2017, 11, 1645–1655. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Description | Value |
|---|---|---|
| Open-circuit voltage of one module | 21.6 V | |
| Short-circuit current of one module | 0.64 A | |
| MPP voltage | 600 V | |
| MPP current | 14.5 A | |
| Number of series-connected modules | 34 | |
| Number of parallel-connected modules | 25 |
| Symbol | Description | Specification |
|---|---|---|
| M | Modulation Index | 0.72 |
| B | Boost factor | 1.92 |
| = | Inductance | 1.3 mH |
| = | Capacitance | 1000 F |
| D | Duty cycle | 0.5 |
| Carrier frequency | 10 kHz | |
| Shoot-through frequency | 20 kHz |
| Symbol | Description | Specification |
|---|---|---|
| P | Number of poles | 6 |
| Power | 4 kW | |
| N | Speed | 1500 rpm |
| Stator Resistance | 0.6 | |
| Rotor Resistance | 0.6 | |
| J | Moment of Inertia | 0.05 kg·m |
| Mutual Inductance | 0.03 H |
| Faulty Switch | Slope | Current in Faulty Phase |
|---|---|---|
| 0 | - | |
| 0 | + | |
| - | ||
| + | ||
| - | ||
| + |
| Condition | Simulation Results | Experimental Results |
|---|---|---|
| Normal operation | 0.42 | 1.23 |
| Open-circuit fault | 44.36 | 41.23 |
| Short-circuit fault | 25.21 | 22.36 |
| Post-fault operation | 1.78 | 1.52 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sharma, V.; Hossain, M.J.; Ali, S.M.N.; Kashif, M. A Photovoltaic-Fed Z-Source Inverter Motor Drive with Fault-Tolerant Capability for Rural Irrigation. Energies 2020, 13, 4630. https://doi.org/10.3390/en13184630
Sharma V, Hossain MJ, Ali SMN, Kashif M. A Photovoltaic-Fed Z-Source Inverter Motor Drive with Fault-Tolerant Capability for Rural Irrigation. Energies. 2020; 13(18):4630. https://doi.org/10.3390/en13184630
Chicago/Turabian StyleSharma, Vivek, M. J. Hossain, S. M. Nawazish Ali, and Muhammad Kashif. 2020. "A Photovoltaic-Fed Z-Source Inverter Motor Drive with Fault-Tolerant Capability for Rural Irrigation" Energies 13, no. 18: 4630. https://doi.org/10.3390/en13184630
APA StyleSharma, V., Hossain, M. J., Ali, S. M. N., & Kashif, M. (2020). A Photovoltaic-Fed Z-Source Inverter Motor Drive with Fault-Tolerant Capability for Rural Irrigation. Energies, 13(18), 4630. https://doi.org/10.3390/en13184630