Power Loss Analysis of Solar Photovoltaic Integrated Model Predictive Control Based On-Grid Inverter

 ,
,  , ,
, ,  and
and 
Abstract
:1. Introduction
- i.
- Design of an MPC-based, on-grid PV inverter for energy-efficient control;
- ii.
- Analysis of the effect of adding a switching frequency in terms of the cost function of MPC and to reduce the switching frequency of the control device with an appropriate weighting factor;
- iii.
- Calculating and analyzing the overall power loss of the proposed system and comparing it with a conventional MPC-based system.
2. Proposed MPC-Based Controller
2.1. Operating Principle
2.2. Proposed Controller Modeling
2.3. Cost Function Design
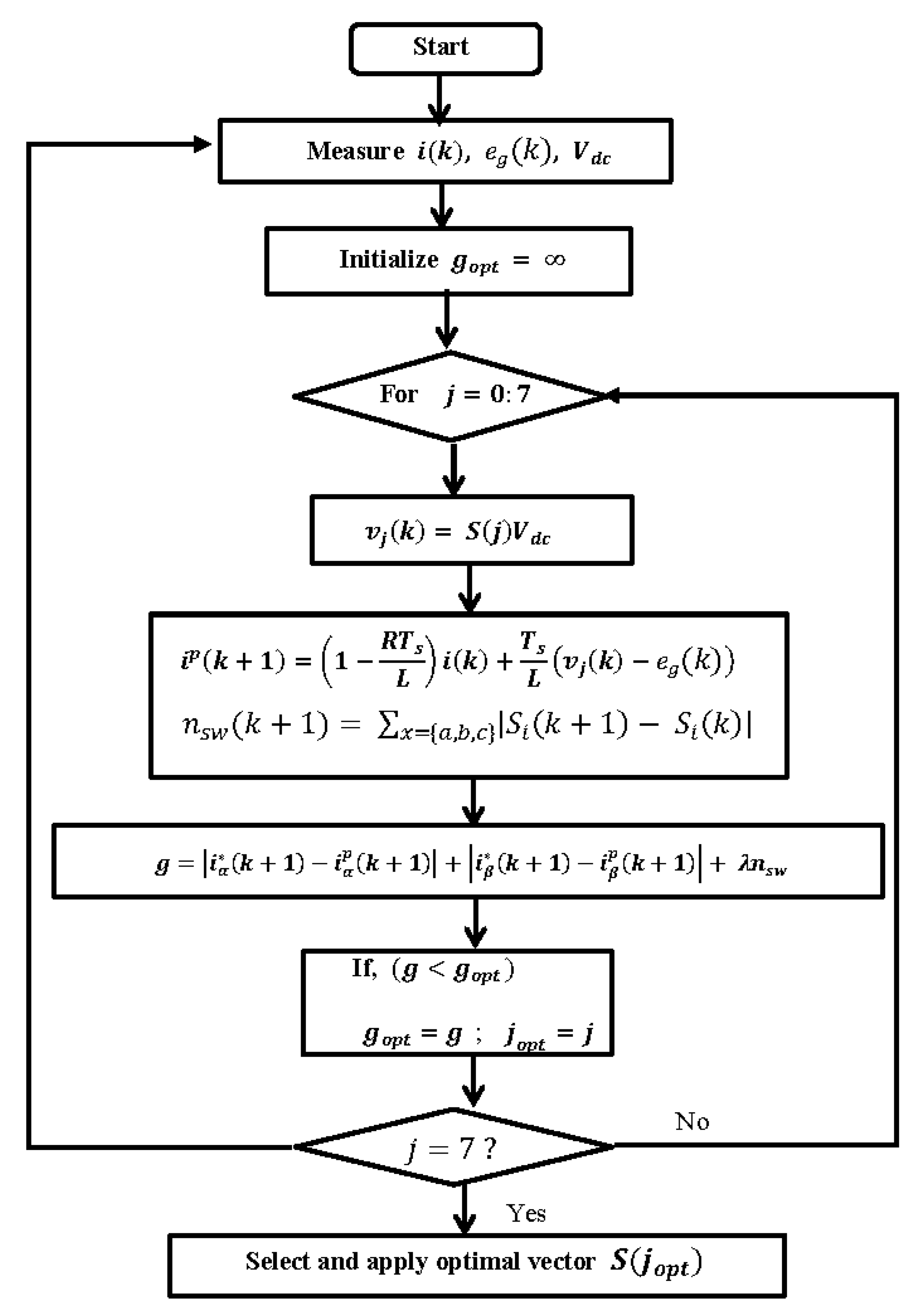
2.4. Control Algorithm
| Algorithm 1. Algorithm utilized in the proposed controller |
| Input: Output: |
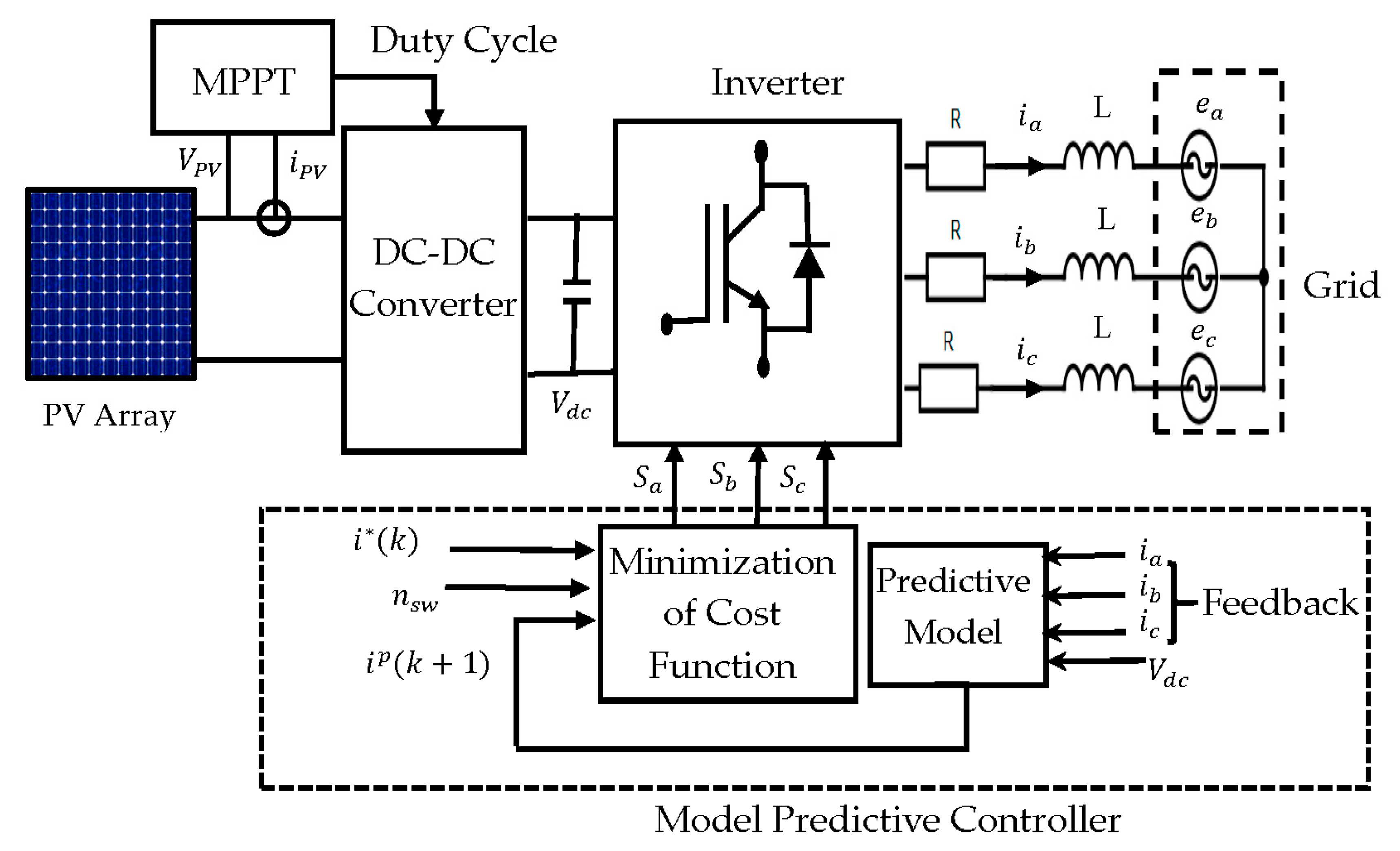
| 1. The inverter input voltage , output current , and grid voltage are measured. |
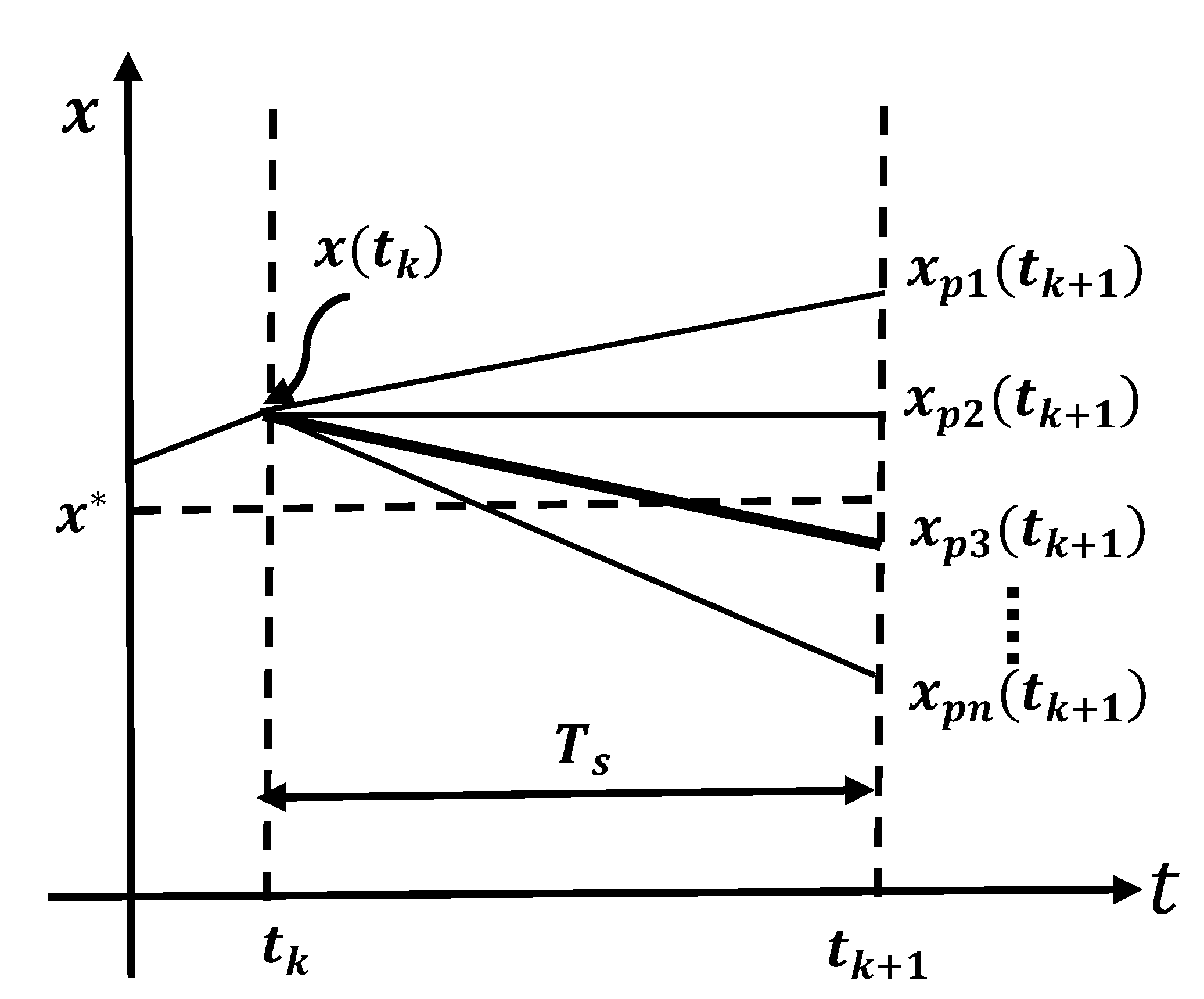
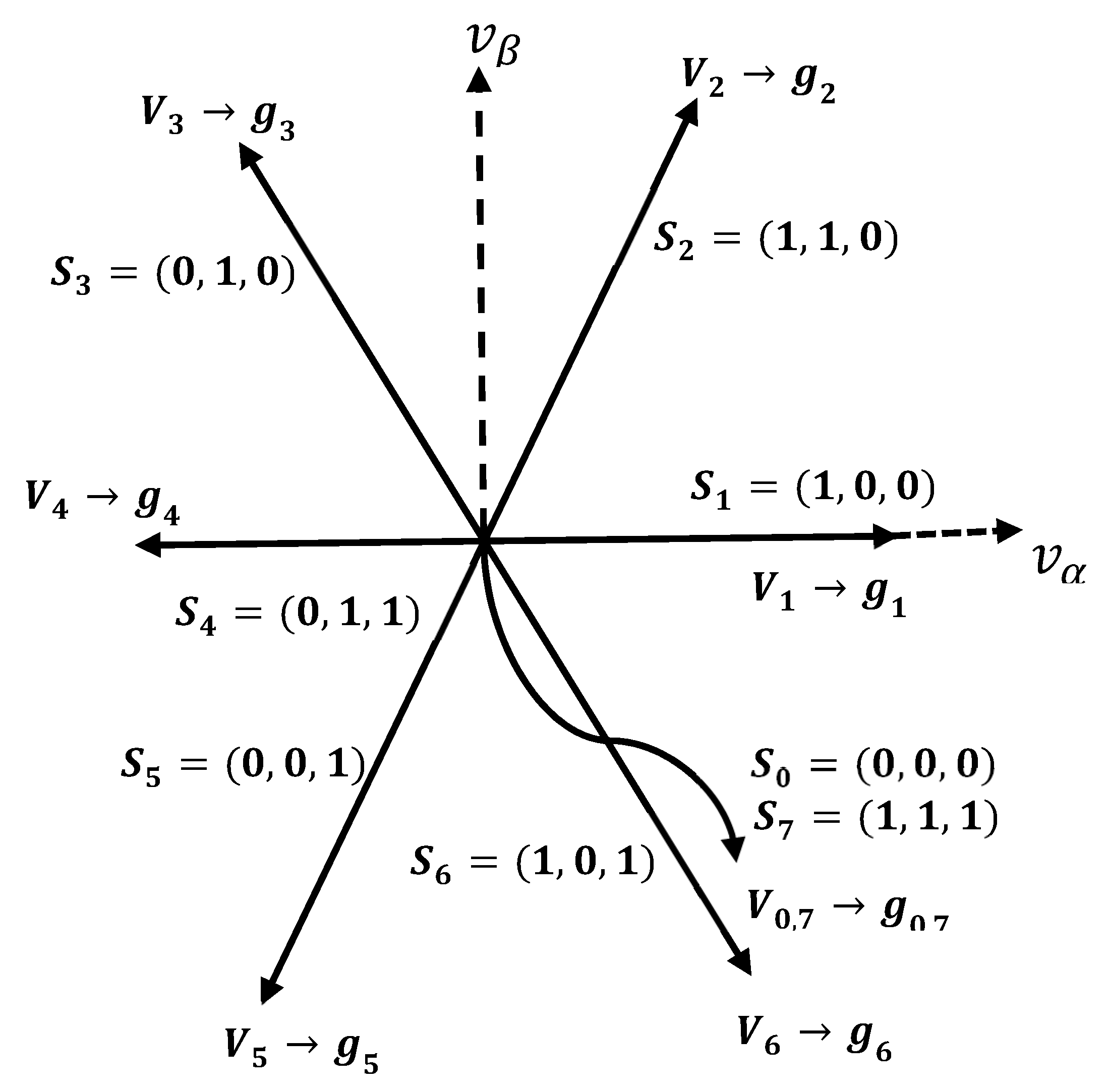
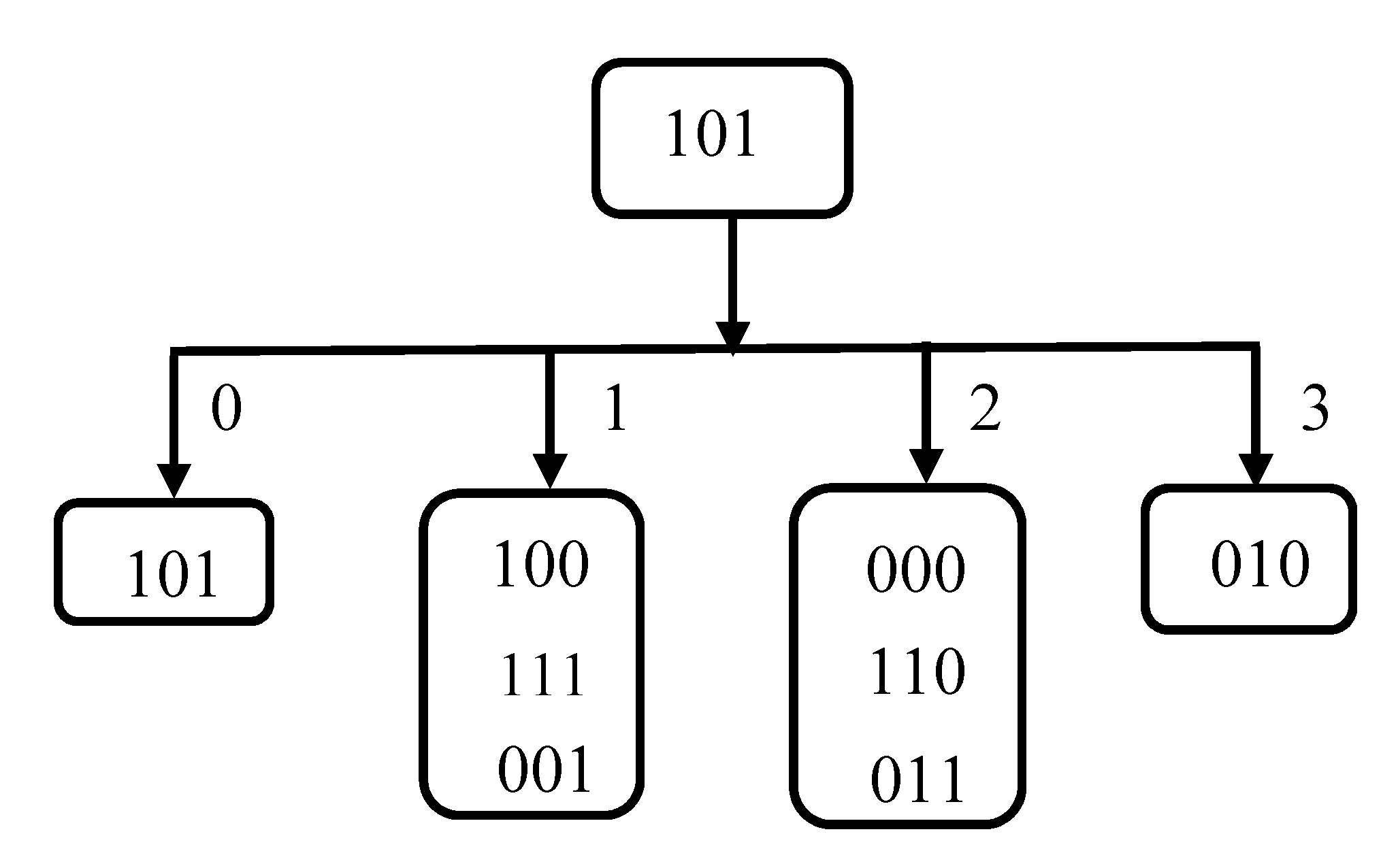
| 2. The future predictive current and the switching transitions from the immediate future state are calculated for all the possible eight states of the inverter using Equations (16) and (17), respectively. |
| 3. Estimation of the value of the proposed cost function using Equation (19). |
| 4. Selection of apposite switching state for the optimized cost function |
| 5. Application of the newly elected switching state to the next sampling state and return to Step 1. |
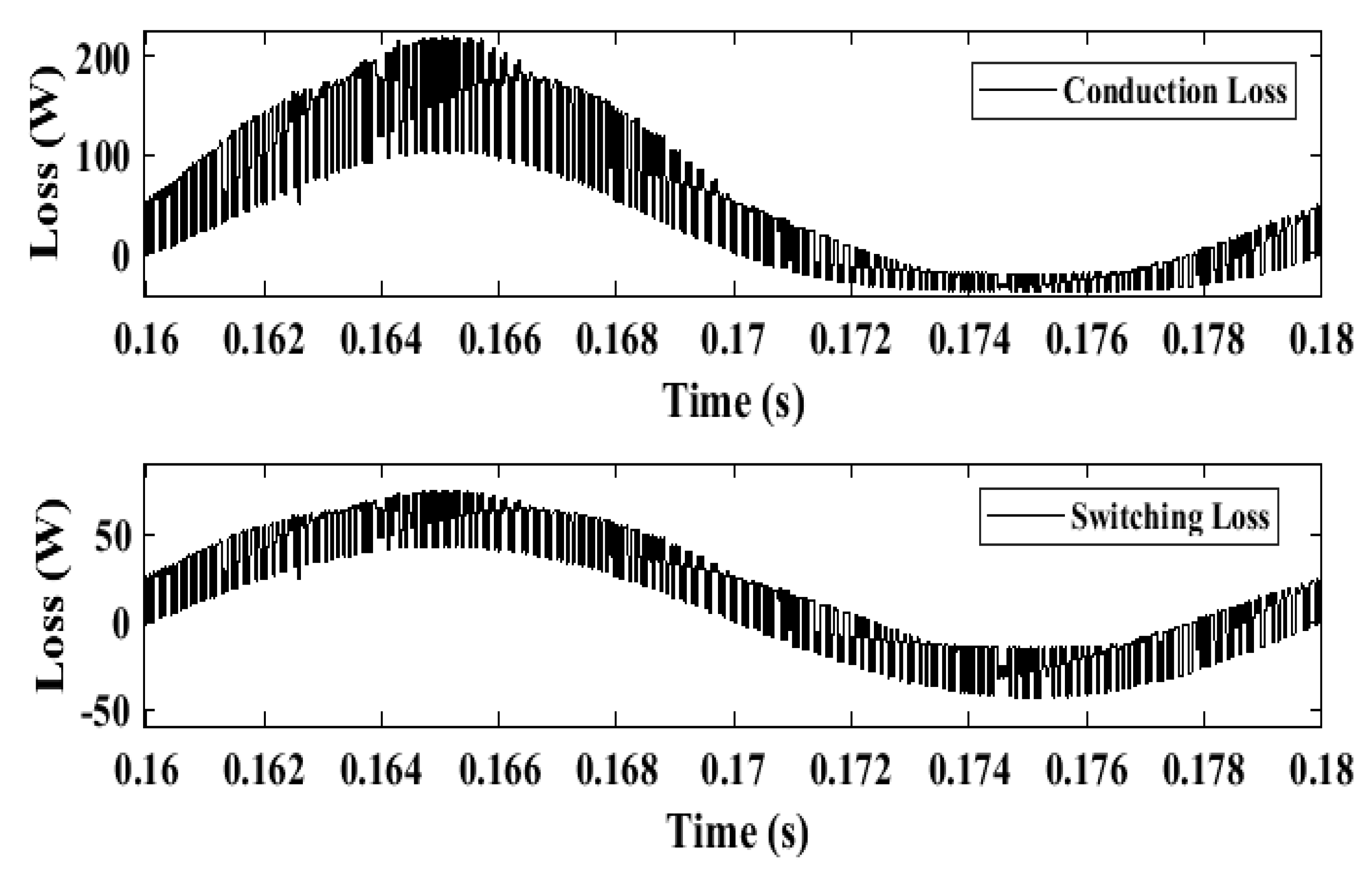
3. Power Loss Analysis
4. Results Analysis
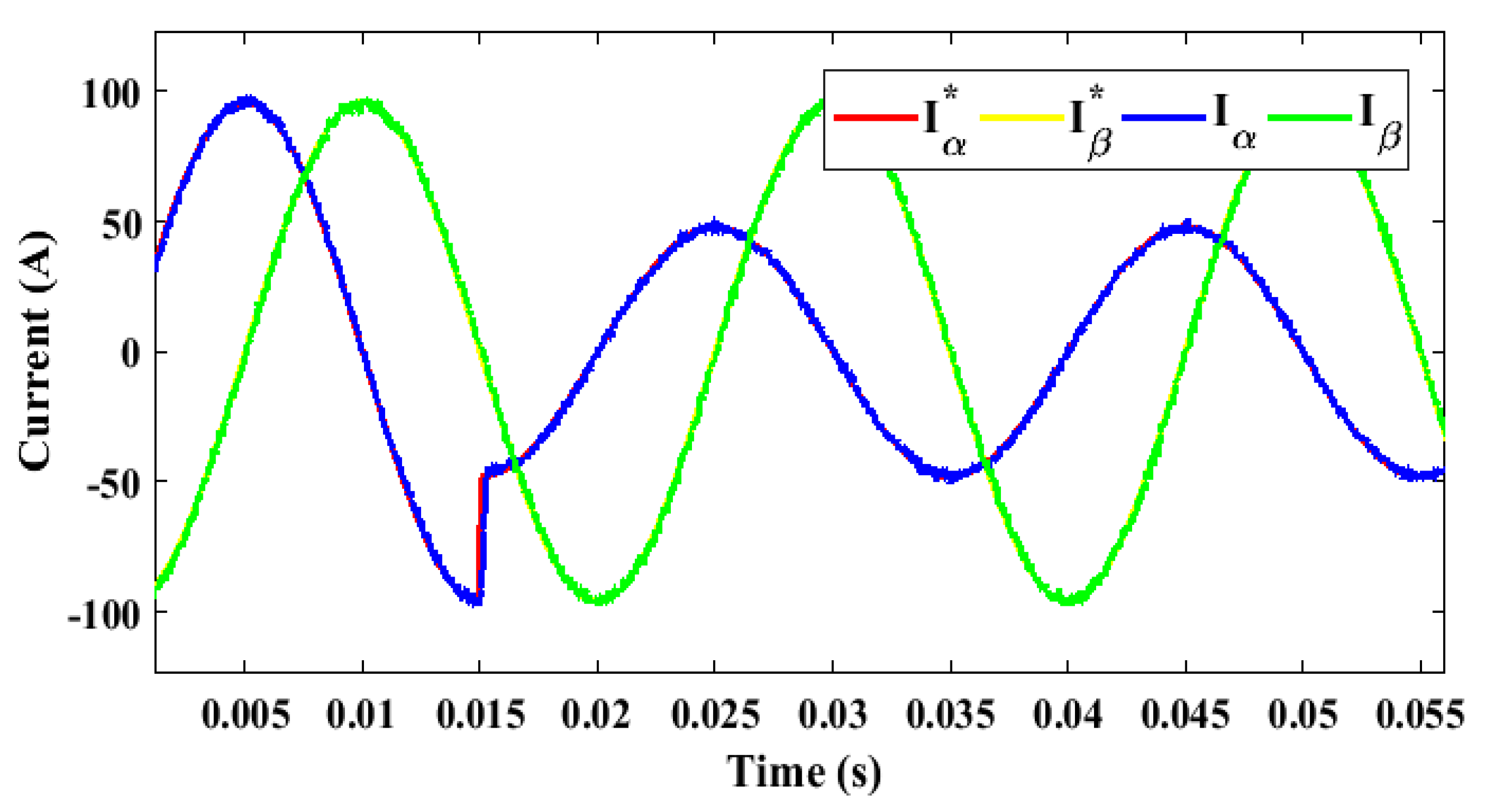
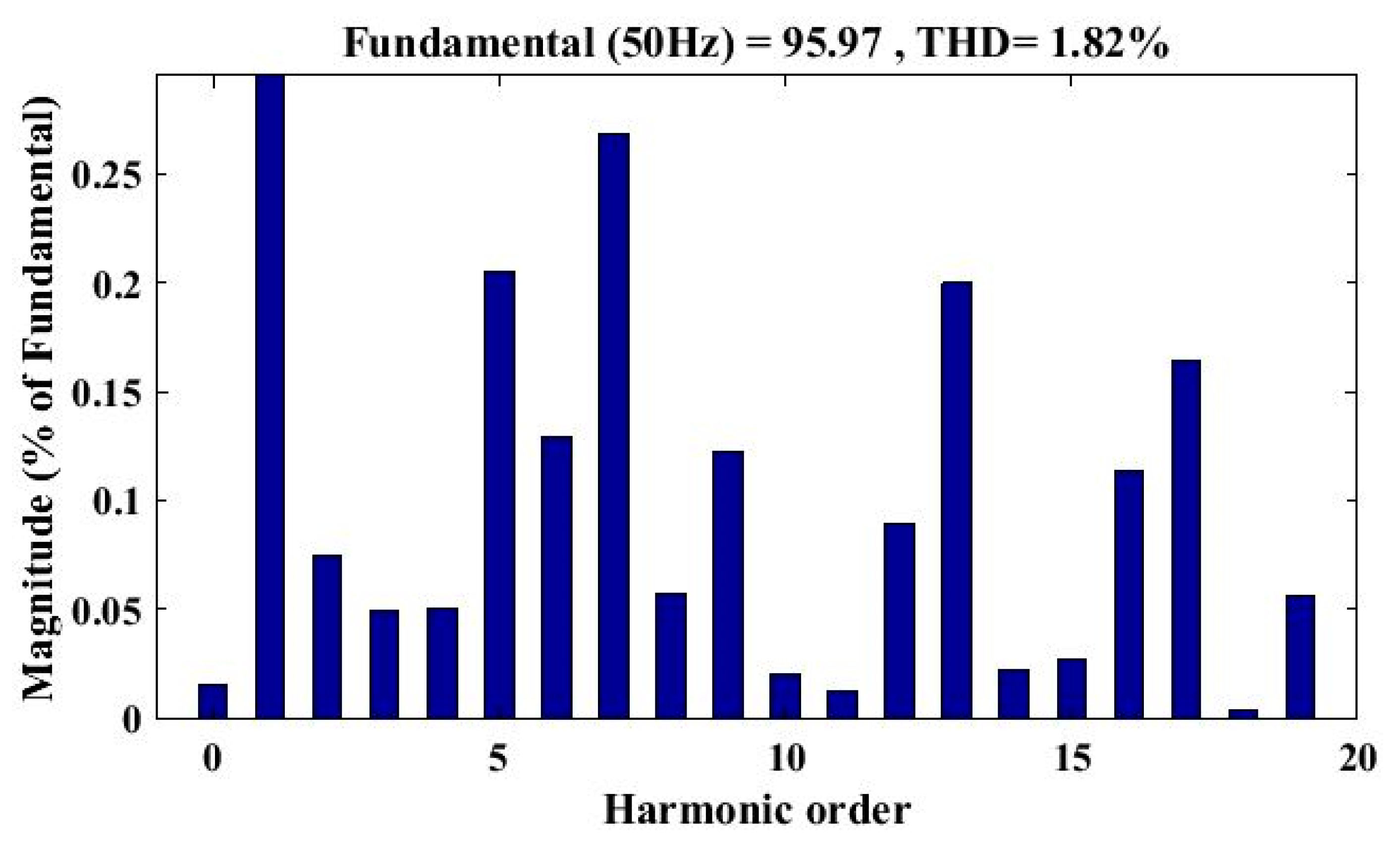
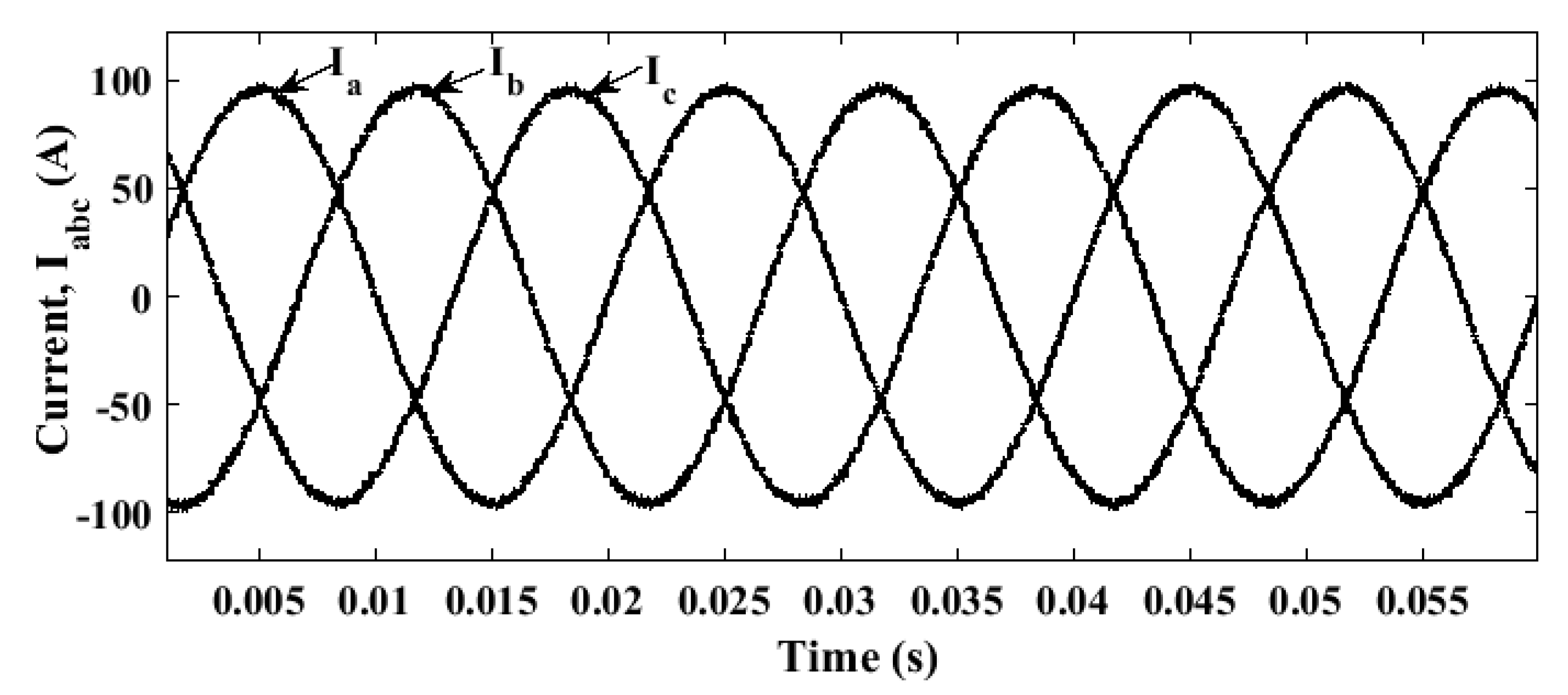
4.1. Steady-State Analysis
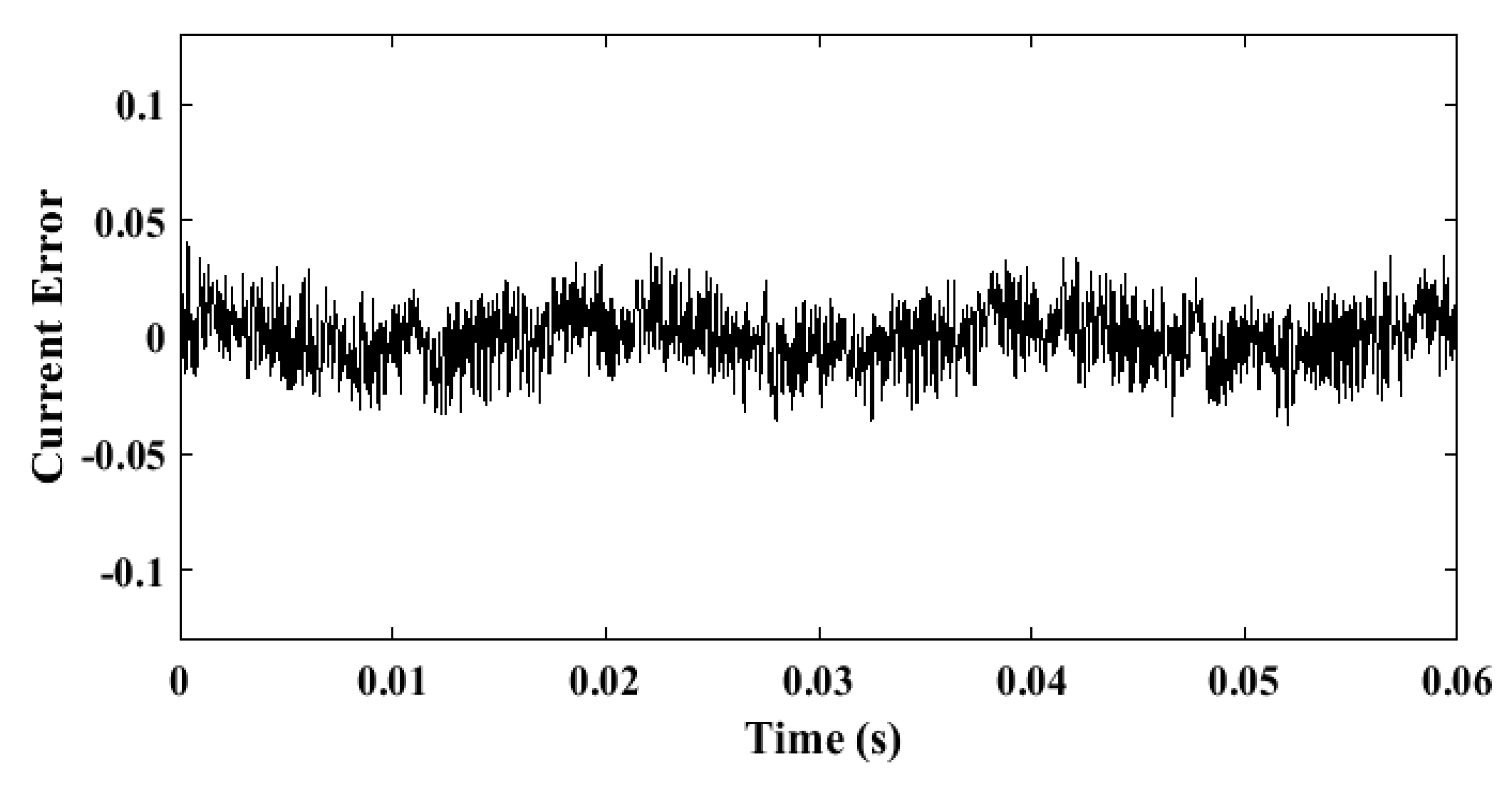
4.2. Current Tracking Accuracy
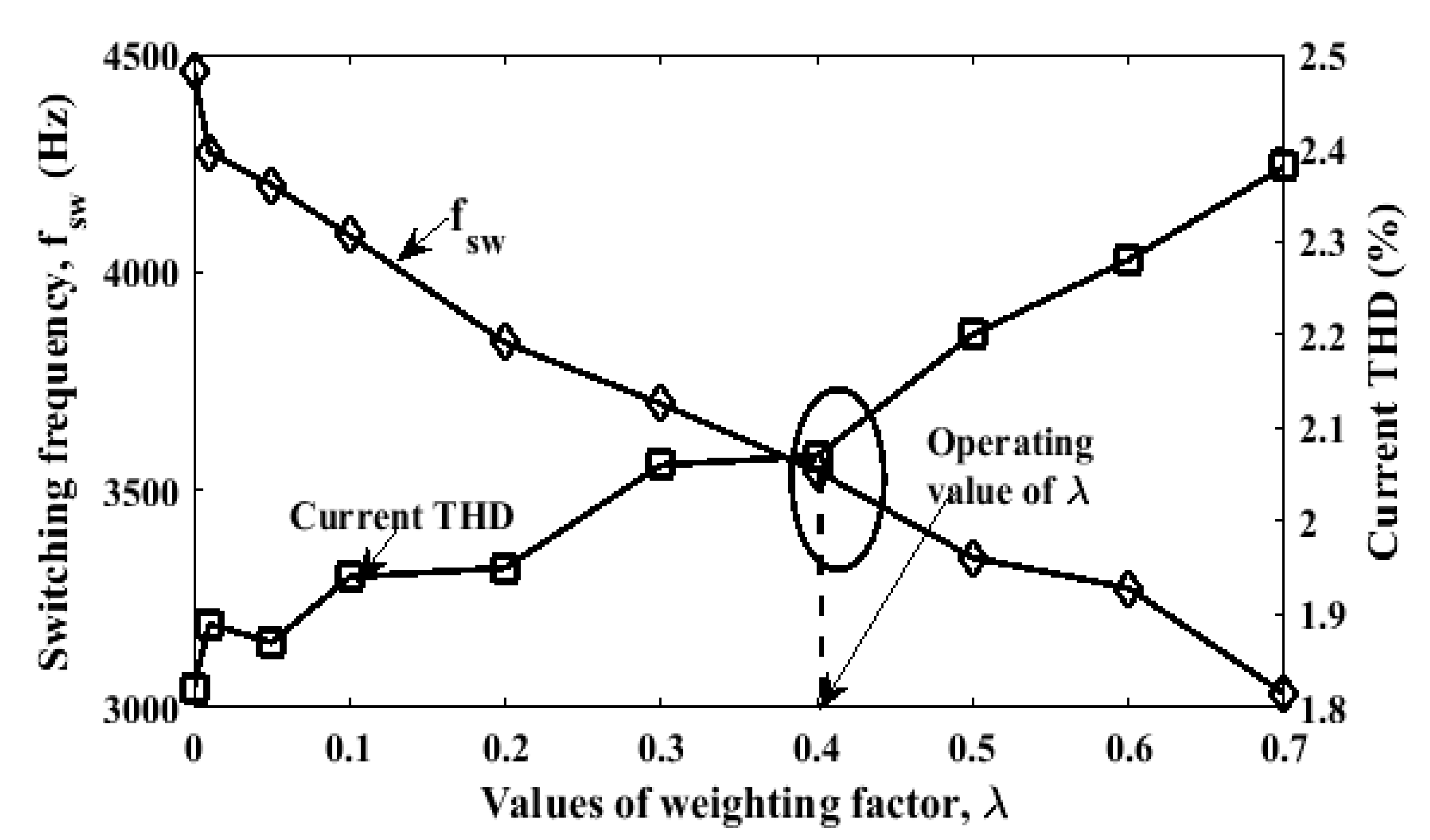
4.3. Effect of Switching Frequency Term in the Cost Function
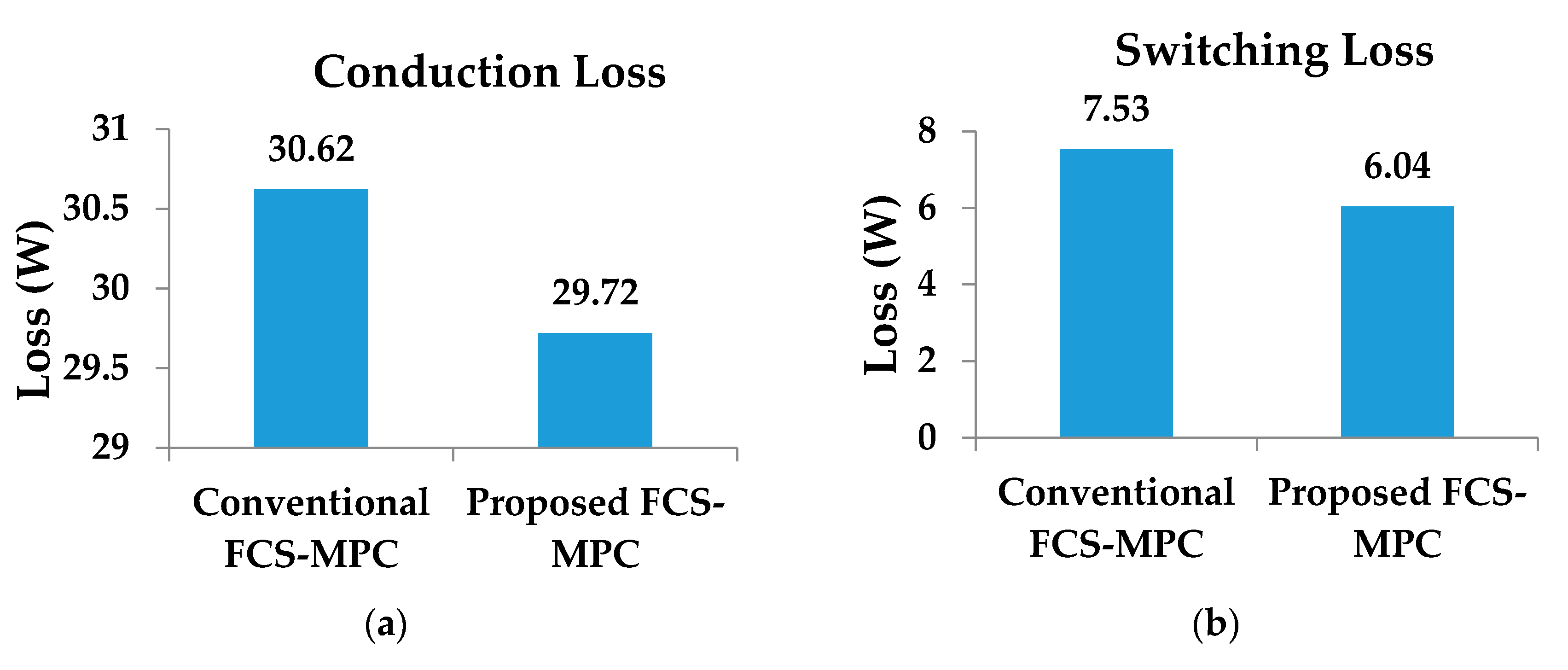
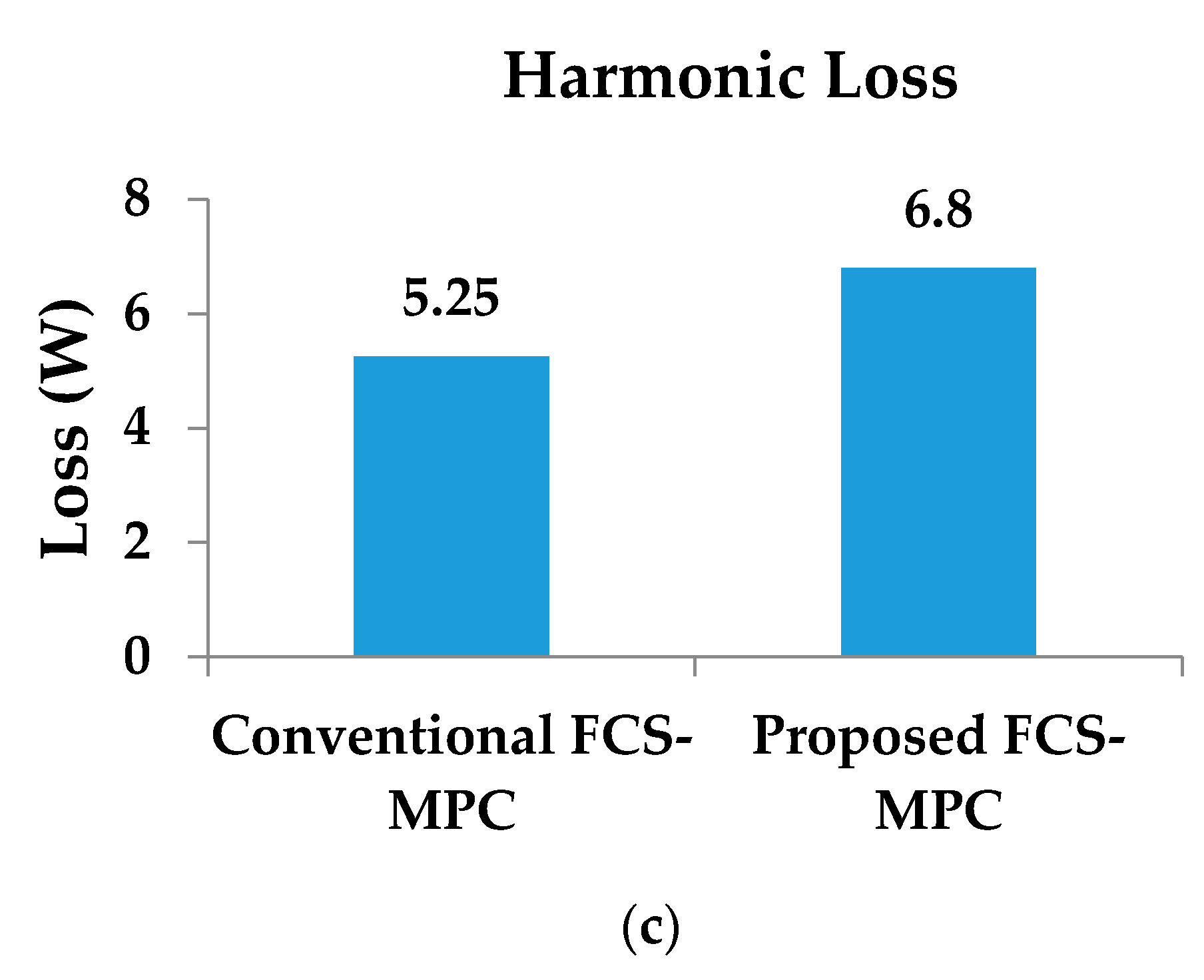
5. Comparison with Conventional MPC
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
Nomenclature
| CCS | Continuous Control Set |
| DTC | Direct Torque Control |
| FCS-MPC | Finite Control Set Model Predictive Control |
| FFT | Fast Fourier Transform |
| IGBT | Insulated Gate Bipolar Transistor |
| MATE | Mean Absolute Tracking Error |
| MPC | Model Predictive Control |
| MPPT | Maximum Power Point Tracking |
| MPDPC | Model Predictive Direct Power Control |
| MPDCC | Model Predictive Direct Current Control |
| PV | Photovoltaic |
| PR | Proportional Resonant |
| PI | Proportional Integral |
| PWM | Pulse Width Modulation |
| P&O | Perturb and Observe |
| SMC | Sliding Mode Control |
| SVM | Space Vector Modulation |
| THD | Total Harmonic Distortion |
| VSI | Voltage Source Inverter |
| , , and | IGBT switching states |
| Future predictive load transitions | |
| Measured parameters | |
| Reference parameter | |
| Step-size of the model | |
| Switching state number | |
| Number of phases | |
| Output voltage vector | |
| DC link voltage | |
| Load current | |
| Grid electromotive force | |
| Cost function | |
| Grid voltage | |
| and | Real and imaginary components of the output current |
| Future predictive current | |
| Number of transitions of the switching devices | |
| Sampling time duration | |
| Switching frequency | |
| Weighting factor | |
| Optimal voltage vector | |
| selected switching state | |
| IGBT turn-on/threshold voltage | |
| IGBT differential resistance | |
| Average conduction loss | |
| Instantaneous conduction loss | |
| Average switching loss | |
| Instantaneous switching loss | |
| Arm current through the upper IGBT | |
| Collector-emitter terminal voltage | |
| Collector current | |
| Turn-on energy | |
| Turn-off energy | |
| Fundamental current | |
| Harmonic component current | |
| Value of current THD | |
| Harmonic loss | |
| Line filter resistance | |
| Output frequency | |
| Phase voltages | |
| Phased currents | |
| , | Phase currents in domain |
References
- Podder, A.K.; Habibullah, M.; Roy, N.K. Current THD analysis of model predictive control based grid-connected PV inverter. In Proceedings of the International Conference on Electrical, Computer and Communication Engineering (ECCE), Cox’s Bazar, Bangladesh, 7–9 February 2019; pp. 1–6. [Google Scholar]
- Podder, A.K.; Tariquzzaman, M.; Habibullah, M. Comprehensive performance analysis of model predictive current control based on-grid photovoltaic inverters. J. Phys. Conf. Ser. 2020, 1432, 1–11. [Google Scholar] [CrossRef]
- Holtz, J. Pulsewidth modulation for electronic power conversion. Proc. IEEE 1994, 82, 1194–1214. [Google Scholar] [CrossRef] [Green Version]
- Mohamed, I.S.; Zaid, A.; Abu-Elyazeed, M.F.; Elsayed, H.M. Model predictive control and classical methods for UPS inverter applications with output LC filter. In Proceedings of the 2013 International Conference on Control, Decision and Information Technologies (CoDIT), Hammamet, Tunisia, 6–8 May 2013; pp. 483–488. [Google Scholar]
- Parvez, M.; Elias, M.F.M.; Rahim, N.A. Analysis of current harmonics compensation and the effect of frequency variation for single-phase stand-alone PV inverters using PR controller. IETE J. Res. 2017, 64, 463–470. [Google Scholar] [CrossRef]
- Escobar, G.; Valdez, A.A.; Leyva-Ramos, J.; Mattavelli, P. Repetitive-based controller for a UPS inverter to compensate unbalance and harmonic distortion. IEEE Trans. Ind. Electron. 2007, 54, 504–510. [Google Scholar] [CrossRef]
- Kojima, M.; Hirabayashi, K.; Kawabata, Y.; Ejiogu, E.C.; Kawabata, T. Novel vector control system using deadbeat-controlled PWM inverter with output LC filter. IEEE Trans. Ind. Appl. 2004, 40, 162–169. [Google Scholar] [CrossRef]
- Sebaaly, F.; Vahedi, H.; Kanaan, H.Y.; Moubayed, N.; Al-Haddad, K. Design and implementation of space vector modulation-based sliding mode control for grid-connected 3L-NPC inverter. IEEE Trans. Ind. Electron. 2016, 63, 7854–7863. [Google Scholar] [CrossRef]
- Saeedifard, M.; Bakhshai, A.; Joos, G. Low switching frequency space vector modulators for high power multi-module converters. IEEE Trans. Power Electron. 2015, 20, 1310–1318. [Google Scholar] [CrossRef]
- Gopinath, A.; Mohamed, A.; Baiju, M.R. Fractal based space vector PWM for multilevel inverters—A novel approach. IEEE Trans. Ind. Electron. 2019, 56, 1230–1237. [Google Scholar] [CrossRef]
- Aneesh, M.; Gopinath, A.; Baiju, M.R. A simple space vector PWM generation scheme for any general n–level inverter. IEEE Trans. Ind. Electron. 2019, 56, 1649–1656. [Google Scholar]
- Rodrguez, J.; Pontt, J.; Silva, C.A.; Correa, P.; Corts, P.; Ammann, U. Predictive current control of a voltage source inverter. IEEE Trans. Ind. Electron. 2007, 54, 495–503. [Google Scholar] [CrossRef]
- Cortes, P.; Kazmierkowski, M.P.; Kennel, R.M.; Quevedo, D.E.; Rodriguez, J. Predictive control in power electronics and drives. IEEE Trans. Ind. Electron. 2008, 55, 4312–4324. [Google Scholar] [CrossRef]
- Lee, J.H. Model predictive control: A review of the three decades of development. Int. J. Control Automat. Syst. 2011, 9, 415–424. [Google Scholar] [CrossRef]
- Morariand, M.; Lee, J.H. Model predictive control: Past, present, and future. Comput. Chem. Eng. 1999, 23, 667–682. [Google Scholar] [CrossRef]
- Kouro, S.; Cortes, P.; Vargas, R.; Ammann, U.; Rodríguez, J. Model predictive control—A simple and powerful method to control power converters. IEEE Trans. Ind. Electron. 2009, 56, 1826–1838. [Google Scholar] [CrossRef]
- Podder, A.K.; Habibullah, M. Model predictive based energy-efficient control of grid-connected PV system. In Proceedings of the 10th International Conference on Electrical and Computer Engineering (ICECE 2018), Dhaka, Bangladesh, 20–22 December 2018; pp. 413–416. [Google Scholar]
- Vazquez, S.; Leon, J.I.; Franquelo, L.G.; Rodriguez, J.; Young, H.A.; Marquez, A.; Zanchetta, P. Model predictive control: A review of its applications in power electronics. IEEE Ind. Electron. Mag. 2014, 8, 16–31. [Google Scholar] [CrossRef]
- Kazmierkowski, M.P.; Malesani, L. Current control techniques for three-phase voltage-source PWM converters: A survey. IEEE Trans. Ind. Electron. 1998, 45, 691–703. [Google Scholar] [CrossRef]
- Timbus, A.; Liserre, M.; Teodorescu, R.; Rodriguez, P.; Blaabjerg, F. Evaluation of current controllers for distributed power generation systems. IEEE Trans. Power Electron. 2009, 24, 654–664. [Google Scholar] [CrossRef]
- Chen, X.; Wu, W.; Gao, N.; Liu, J.; Chung, H.S.-H.; Blaabjerg, F. Finite control set model predictive control for an LCL-filtered grid-tied inverter with full status estimations under unbalanced grid voltage. Energies 2019, 12, 2691. [Google Scholar] [CrossRef] [Green Version]
- Ahmed, A.A.; Koh, B.K.; Lee, Y.I. Continuous control set-model predictive control for torque control of induction motors in a wide speed range. Electr. Power Compon. Syst. 2018, 46, 2142–2158. [Google Scholar] [CrossRef]
- Ngo, V.-Q.-B.; Nguyen, M.-K.; Tran, T.-T.; Choi, J.-H.; Lim, Y.-C. A modified model predictive power control for grid-connected T-type inverter with reduced computational complexity. Electronics 2019, 8, 217. [Google Scholar] [CrossRef] [Green Version]
- Xia, C.; Liu, T.; Shi, T.; Song, Z. A simplified finite-control-set model-predictive control for power converters. IEEE Trans. Ind. Inform. 2014, 10, 991–1002. [Google Scholar]
- He, F.; Zhao, Z.; Lu, T.; Yuan, L. Predictive DC voltage control for three-phase grid-connected PV inverters based on energy balance modeling. In Proceedings of the 2nd International Symposium on Power Electronics for Distributed Generation Systems, Hefei, China, 16–18 June 2010; pp. 516–519. [Google Scholar]
- Jianhua, W.; Jing, Z.; Longfei, L.; Cong, T.; Le, Y. Predictive control based on analytic model for PV grid-connected inverters. In Proceedings of the 24th Chinese Control and Decision Conference (CCDC), Taiyuan, China, 23–25 May 2012; pp. 4295–4299. [Google Scholar]
- Nan, J.; Xuanxuan, D.; Guangzhao, C.; Zhifeng, D.; Dongyi, K. Model-predictive direct power control of grid-connected inverters for PV systems. In Proceedings of the International Conference on Renewable Power Generation (RPG), Beijing, China, 17–18 October 2015; pp. 1–5. [Google Scholar]
- Nan, J.; Shiyang, H.; Guangzhao, C.; Suxia, J.; Dongyi, K. Model-predictive current control of grid-connected inverters for PV systems. In Proceedings of the International Conference on Renewable Power Generation (RPG), Beijing, China, 17–18 October 2015; pp. 1–5. [Google Scholar]
- Shang, L.; Li, P.; Li, Z. Low voltage ride through control method of photovoltaic grid-connected inverter based on model current predictive control. In Proceedings of the Chinese Control and Decision Conference (CCDC), Shenyang, China, 9–11 June 2018; pp. 5209–5214. [Google Scholar]
- Bighash, E.Z.; Sadeghzadeh, S.M.; Ebrahimzadeh, E.; Blaabjerg, F. Robust MPC-based current controller against grid impedance variations for single-phase grid-connected inverters. ISA Trans. 2019, 84, 154–163. [Google Scholar] [CrossRef]
- Bighash, E.Z.; Sadeghzadeh, S.M.; Ebrahimzadeh, E.; Blaabjerg, F. High-quality model predictive control for single phase grid-connected photovoltaic inverters. Elec. Power Syst. Res. 2018, 158, 115–125. [Google Scholar] [CrossRef]
- Geldenhuys, J.M.C. Model Predictive Control of a Grid-Connected Converter with LCL-Filter. Master’s Thesis, University of Stellenbosch, Stellenbosch, South Africa, 2018. [Google Scholar]
- Roh Chan, R.; Kwak, S. Model-based predictive current control method with constant switching frequency for single-phase voltage source inverters. Energies 2017, 10, 1927. [Google Scholar] [CrossRef] [Green Version]
- Kwak, S.; Park, J. Switching strategy based on model predictive control of VSI to obtain high efficiency and balanced loss distribution. IEEE Trans. Power Electron. 2014, 29, 4551–4567. [Google Scholar] [CrossRef]
- Vargas, R.; Ammann, U.; Rodriguez, J.; Pontt, J. Reduction of switching losses and increase in efficiency of power converters using predictive control. In Proceedings of the IEEE Power Electronics Specialists Conference, Rhodes, Greece, 15–19 June 2008; pp. 1062–1068. [Google Scholar]
- Cui, Q.; Liao, M.; Liao, Z.; Chen, Z. Frequency reduction-based model predictive direct power control with multi-cost function. Adv. Intell. Syst. Res. 2018, 143, 241–245. [Google Scholar]
- Preindl, M.; Schaltz, E.; Thogersen, P. Switching frequency reduction using model predictive direct current control for high-power voltage source inverters. IEEE Trans. Ind. Electron. 2011, 58, 2826–2835. [Google Scholar] [CrossRef]
- Hu, J.; Zhu, J.; Dorrell, D.G. Model predictive control of grid-connected inverters for PV systems with flexible power regulation and switching frequency reduction. IEEE Trans. Ind. App. 2015, 51, 587–594. [Google Scholar] [CrossRef]
- Yaramasu, V.; Wu, B.; Rivera, M.; Rodriguez, J. Enhanced model predictive voltage control of four-leg inverters with switching frequency reduction for standalone power systems. In Proceedings of the 15th International Power Electronics and Motion Control Conference (EPE/PEMC), Novi Sad, Serbia, 4–6 September 2012; pp. DS2c.6-1–DS2c.6-5. [Google Scholar]
- Abushaiba, A.A.; Eshtaiwi, S.M.M.; Ahmadi, R. A new model predictive based maximum power point tracking method for photovoltaic applications. In Proceedings of the International Conference on Electro Information Technology (EIT), Grand Forks, ND, USA, 19–21 May 2016; pp. 0571–0575. [Google Scholar]
- Podder, A.K.; Roy, N.K.; Pota, H.R. MPPT methods for solar PV systems: A critical review based on tracking nature. IET Renew. Power Gen. 2019, 13, 1615–1632. [Google Scholar] [CrossRef]
- Hu, J.; Cheng, K.W.E. Predictive control of power electronics converters in renewable energy systems. Energies 2017, 10, 515. [Google Scholar] [CrossRef]
- Rodriguez, J.; Cortes, P. Predictive Control. of Power Converters and Electrical Drives; Wiley-IEEE: Hoboken, NJ, USA, 2012. [Google Scholar]
- Habibullah, M. Simplified Finite-State Predictive Torque Control Strategies for Induction Motor Drives. Ph.D. Thesis, The University of Sydney, Sydney, Australia, 2016. [Google Scholar]
- Shuvo, S.; Hossain, E.; Islam, T.; Akib, A.; Padmanaban, S.; Khan, M.Z.R. Design and hardware implementation considerations of modified multilevel cascaded H-Bridge inverter for photovoltaic system. IEEE Access 2019, 7, 16504–16524. [Google Scholar] [CrossRef]
- Kennel, R.; Schronder, D. Predictive control strategy for converters. In Proceedings of the 3rd IFAC Symposium on Control in Power Electronics and Electrical Drives, Lausanne, Switzerland, 12–14 September 1983; pp. 415–422. [Google Scholar]
- Rodriguez, J.; Kazmierkowski, M.P.; Espinoza, J.R.; Zanchetta, P.; Abu-Rub, H.; Young, H.A.; Rojas, C.A. State of the art of finite control set model predictive control in power electronics. IEEE Trans. Ind. Inform. 2013, 9, 1003–1016. [Google Scholar] [CrossRef]
- Jun, E.; Park, S.; Kwak, S. Model predictive current control method with improved performances for three-phase voltage source inverters. Electronics 2019, 8, 625. [Google Scholar] [CrossRef] [Green Version]
- Malek, H. Control of Grid-Connected Photovoltaic Systems Using Fractional-Order Operators. Ph.D. Thesis, Utah State University, Logan, UT, USA, 2014. Available online: https://digitalcommons.usu.edu/etd/2157 (accessed on 24 January 2020).
- Buso, S.; Mattavelli, P. Digital Control. In Power Electronics; (Ser. 978-1598291124); Morgan and Claypool Publishers: Denver, CO, USA, 2006. [Google Scholar]
- Blaabjerg, F.; Chen, Z.; Kjaer, S. Power electronics as efficient interface in dispersed power generation systems. IEEE Trans. Power Electron. 2004, 19, 1184–1194. [Google Scholar] [CrossRef]
- Perantzakis, G.; Xepapas, F.; Papathanassiou, S.; Manias, S. A predictive current control technique for three-level NPC voltage source inverters. In Proceedings of the IEEE Power Electronics Specialists Conference, Recife, Brazil, 12–16 June 2005; pp. 1241–1246. [Google Scholar]
- Zhang, Z.; Wang, H.; Wang, Z.; Yang, Y.; Blaabjerg, F. Simplified thermal modeling for IGBT modules with periodic power loss profiles in modular multilevel converters. IEEE Trans. Ind. Electron. 2019, 66, 2323–2332. [Google Scholar] [CrossRef] [Green Version]
- Qin, R.; Yang, C.; Tao, H.; Peng, T.; Yang, C.; Chen, Z. A power loss decrease method based on finite set model predictive control for a motor emulator with reduced switch count. Energies 2019, 12, 4647. [Google Scholar] [CrossRef] [Green Version]
- Alhasheem, M.; Blaabjerg, F.; Davari, P. Performance assessment of grid forming converters using different finite control set model predictive control (FCS-MPC) algorithms. Appl. Sci. 2019, 9, 3513. [Google Scholar] [CrossRef] [Green Version]
- Bierhoff, M.H.; Fuchs, F.W. Semiconductor losses in voltage source and current source IGBT converters based on analytical derivation. In Proceedings of the 35th Annual Power Electronics Specialists Conference (IEEE Cat. No.04CH37551), Aachen, Germany, 20–25 June 2004; pp. 2836–2842. [Google Scholar]
- On Semiconductor. “IGBT” NJTG50N60FWG Datasheet. December 2012. Available online: https://www.onsemi.com/pub/Collateral/NGTG50N60FW-D.PDF (accessed on 4 April 2020).
- Ghorbani, M.J.; Mokhtari, H. Impact of harmonics on power quality and losses in power distribution systems. Int. J. Electr. Comput. Eng. (IJECE) 2015, 5, 166–174. [Google Scholar] [CrossRef]
- Ghani, Z.A.; Hannan, M.A.; Mohamed, A. Renewable energy inverter development using dSPACE DS1104 controller board. In Proceedings of the IEEE International Conference on Power and Energy (PECon2010), Kuala Lumpur, Malaysia, 29 November–1 December 2010; pp. 1–6. [Google Scholar]
- dSPACE DS1104. Hardware Installation and Configuration and ControlDesk Experiment Guide; dSPACE GmbH: Paderborn, Germany, 2008; Available online: https://datacenterhub.org/dv_dibbs/file/1333:dibbs/?f=/1333/data/files/experiments/reports/106885/DS1104_config.pdf (accessed on 30 October 2019).























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Controllers | Advantages | Disadvantages |
|---|---|---|
| Hysteresis |
|
|
| Proportional- Integral |
|
|
| Proportional- Resonant |
|
|
| Space Vector Modulation |
|
|
| Predictive |
|
|
| Reference | Strategy | Cost Function | Comment |
|---|---|---|---|
| [34] | Switching strategy based on finite control set model predictive control (FCS-MPC) |
| |
| [35] | Predictive current control strategy |
| |
| [36] | Frequency reduction-based model predictive direct power control (MPDPC) with multi-cost function |
| |
| [37] | Model predictive direct current control (MPDCC) | for transient state for steady-state |
|
| [38] | MPDPC |
| |
| [39] | Model predictive voltage control |
| |
| Proposed Controller | FCS-MPC |
|
| Parameter | Value |
|---|---|
| Inverter dc-link voltage () | 850 V |
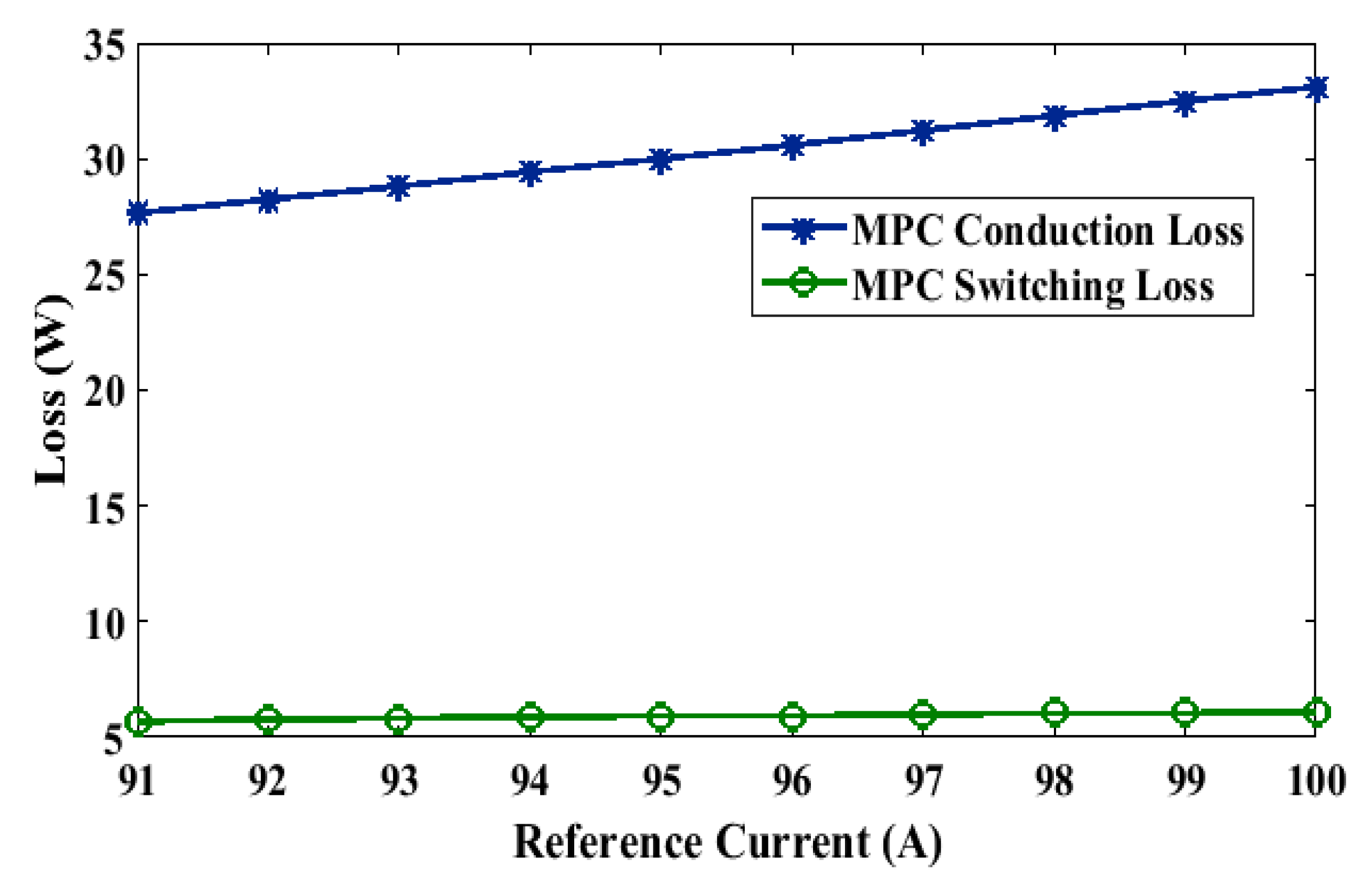
| Reference current () | 96 A |
| Output frequency () | 50 Hz |
| Line filter resistance () | 3.44 |
| Line filter inductance () | 3 mH |
| Grid voltage () | 120 V |
| Average Switching Frequency, (kHz) | Conduction Loss, (W) | Switching Loss, (W) | Current THD, (%) | |
|---|---|---|---|---|
| 0 | 4.46 | 30.62 | 7.53 | 1.82 |
| 0.01 | 4.28 | 29.73 | 7.51 | 1.89 |
| 0.05 | 4.20 | 29.73 | 7.22 | 1.87 |
| 0.1 | 4.08 | 29.70 | 7.01 | 1.94 |
| 0.2 | 3.84 | 29.69 | 6.65 | 1.95 |
| 0.3 | 3.70 | 29.71 | 6.34 | 2.06 |
| 0.4 | 3.54 | 29.72 | 6.04 | 2.07 |
| 0.5 | 3.34 | 29.73 | 5.79 | 2.20 |
| 0.6 | 3.27 | 29.74 | 5.60 | 2.28 |
| 0.7 | 3.03 | 29.77 | 5.38 | 2.38 |
| Parameters | Value | Parameters | Value |
|---|---|---|---|
| Switching frequency, fsw | 3.54 kHz | DC link voltage, Vdc | 850 V |
| Turn-on energy, Eon | 1.4 mJ | Turn-on/Threshold voltage of IGBT, Vce0 | 1.5 V |
| Turn-off Energy, Eoff | 2.0 mJ | Output frequency, fo | 50 Hz |
| Voltage across Vce during Test, Vccnom | 400 V | IGBT differential resistance, Rce | 0.0147 |
| Collector current during Test, Icnom | 50 A |
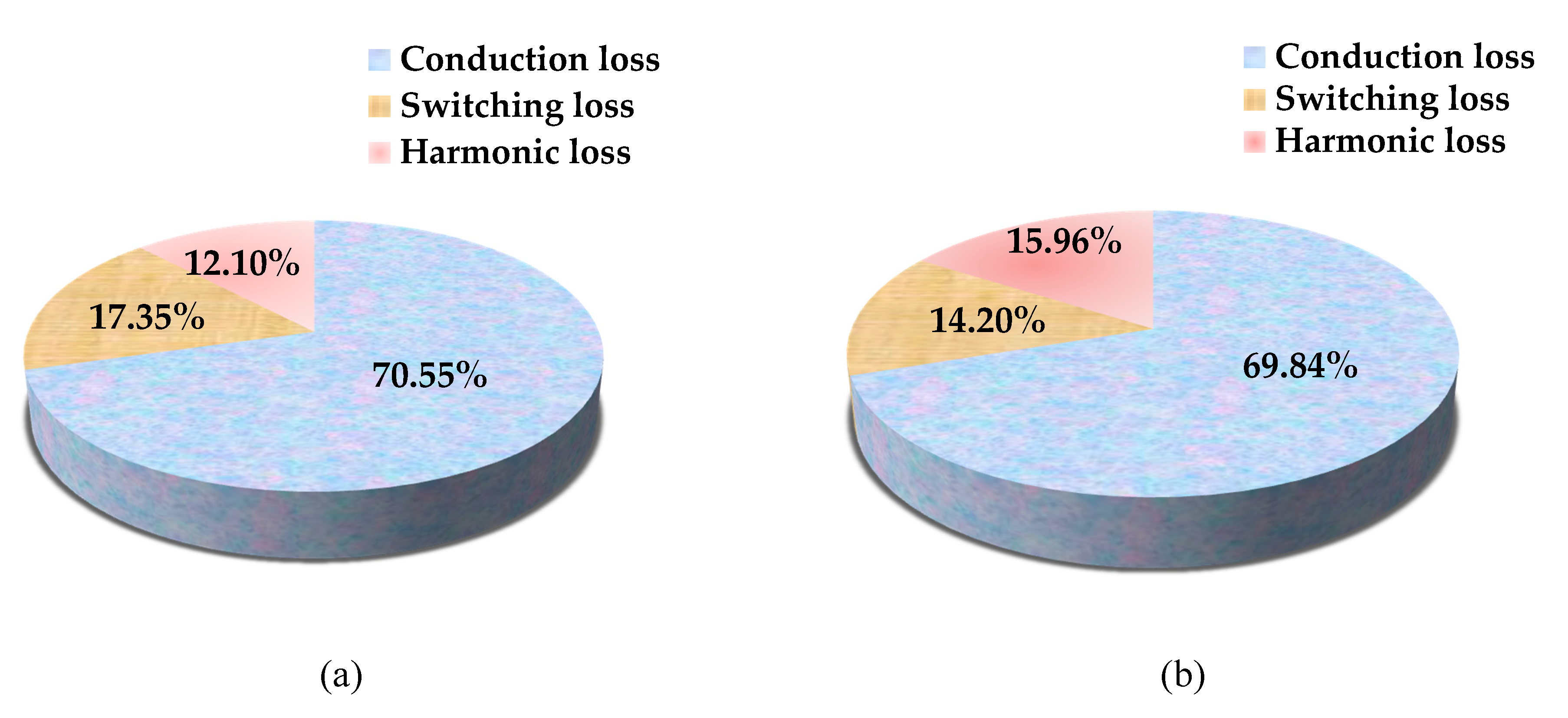
| Parameters | Conventional FCS-MPC | Proposed FCS-MPC |
|---|---|---|
| Cost function | ||
| Switching Frequency | 4.46 kHz | 3.54 kHz |
| Switching loss | 7.53 W | 6.04 W |
| Conduction loss | 30.62 W | 29.72 W |
| Harmonic loss | 5.25 W | 6.80 W |
| Overall loss per phase | 43.40 W | 42.56 W |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Podder, A.K.; Habibullah, M.; Tariquzzaman, M.; Hossain, E.; Padmanaban, S. Power Loss Analysis of Solar Photovoltaic Integrated Model Predictive Control Based On-Grid Inverter. Energies 2020, 13, 4669. https://doi.org/10.3390/en13184669
Podder AK, Habibullah M, Tariquzzaman M, Hossain E, Padmanaban S. Power Loss Analysis of Solar Photovoltaic Integrated Model Predictive Control Based On-Grid Inverter. Energies. 2020; 13(18):4669. https://doi.org/10.3390/en13184669
Chicago/Turabian StylePodder, Amit Kumer, Md. Habibullah, Md. Tariquzzaman, Eklas Hossain, and Sanjeevikumar Padmanaban. 2020. "Power Loss Analysis of Solar Photovoltaic Integrated Model Predictive Control Based On-Grid Inverter" Energies 13, no. 18: 4669. https://doi.org/10.3390/en13184669
APA StylePodder, A. K., Habibullah, M., Tariquzzaman, M., Hossain, E., & Padmanaban, S. (2020). Power Loss Analysis of Solar Photovoltaic Integrated Model Predictive Control Based On-Grid Inverter. Energies, 13(18), 4669. https://doi.org/10.3390/en13184669