Prognostics and Health Management for the Optimization of Marine Hybrid Energy Systems




Abstract
:1. Introduction
2. Prognostics and Propulsion Research in Marine Systems
2.1. Prognostics and Health Management
2.2. Propulsion and Health Management of Marine Vessels
3. Hybrid Vessel Energy System Overview
3.1. Optimization Approach
3.2. Marine Vessel Data Gathering
4. Methodology and Results for Data Analysis of Individual Energy Assets
4.1. Lithium-Ion Battery Prognostics for Hybrid Vessels: A Case Study
4.1.1. Prognostics Methods
4.1.2. Relevance Vector Regression Background
4.1.3. RVM Training Algorithm
- Initialization step: Initialize the weight and variance
- Expectation step: Use and from iteration k to estimate subsequent iterations and , where:where the covariance , and , are the weights at iteration k and .
- Maximization step: Use obtained in the second step to calculate the variance , where:where is the trace of a matrix.
- Convergence threshold: The iteration will end if , where is normally a very small number that is set to be our empirical threshold. If the condition is not satisfied, then we will go back to the expectation step and start a new iteration.
4.1.4. Battery Data Source and Aging Test
4.1.5. Battery Feature Selection and RUL Prediction
4.1.6. Algorithm Evaluation and Results
4.2. Lead-Acid Battery Prognostics
4.2.1. Experiment Setup and Data Collection
- Charge the battery for 10 h to ensure the test battery is being sufficiently recharged between tests.
- Allow the battery time to settle after charging (30 min).
- Enter the “discharge loop”, only exiting if a non-pulse voltage measurement goes below the 10.5 V threshold.The discharge loop consists of the following steps:
- (a)
- Pulse the battery. This consists of putting the battery under load for a specified period of time (200 ms).
- (b)
- Discharge the battery by 1 Ah (5% of the rated capacity).
- (c)
- Allow the battery time to settle (30 min).
4.2.2. Data Classification and Results
4.3. Diesel Engine Modeling
4.3.1. Diesel Engine Operation and Optimization
4.3.2. Diesel Engine Emissions
5. Whole-System Optimization of Power Use and Emissions for Hybrid Vessels
5.1. Energy Usage
5.2. Battery Model
Modeling Assumptions
- The model does not account for the latency of power output for engine and battery. It is assumed that power demand at any level would be provided instantaneously.
- According to the data sheets, the battery can provide a maximum power demand of 750 kW from the observed data; thus, we did not introduce any maximum power constraints to the battery. If the battery specification changes, further battery instruction will be needed for the battery to operate within rated working limits.
- In lieu of information regarding a power converter and electric motor controller for the system, it has thus far been assumed that the constraints imposed by this will not affect the operational algorithms.
5.3. Engine Only Scenario
5.4. Battery Only Scenario
5.5. Micro-Cycling Scenario
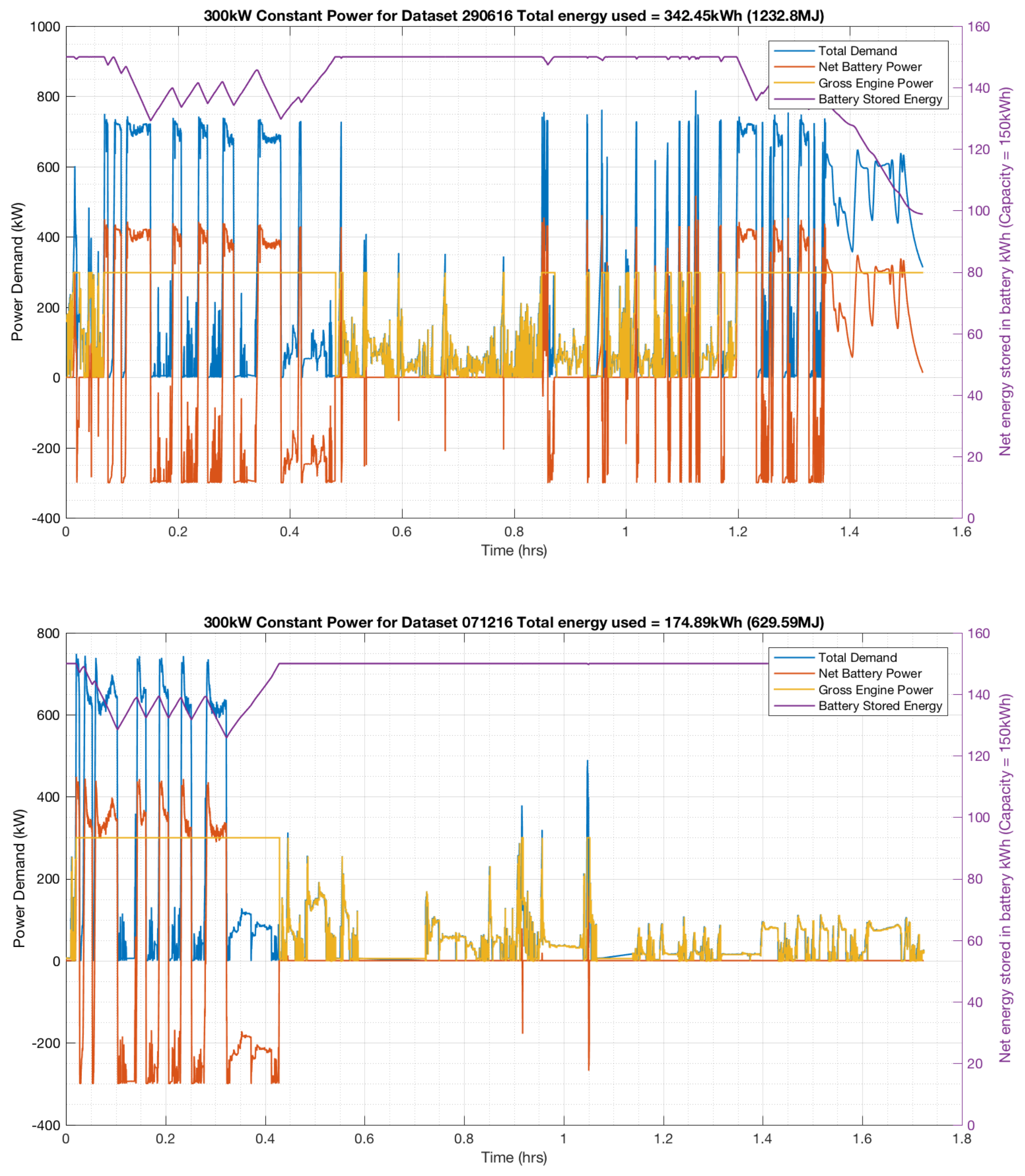
5.6. Full Battery Cycling Scenario
5.7. Results
5.8. Engine/Battery Pair Matching
5.9. Challenge and Future Work
- Potential for dynamic engine operating set-points. This would allow the engine set-points to be changed by the control system in order to further optimize output emissions.
- Investigation into the potential for use of a multi-regime system. Such a system might change the operation of the hybrid system based on the operation of the vessel, such as having a docking mode which, it might be imagined, could switch the system to run on 100% battery during the docking stages of a journey.
- Data-driven model with more feasibility considerations for live battery prognostic. Currently our battery prognostic model is geared towards outputting live RUL prediction when given dynamic operational data, especially partial charge and discharge data.
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- The International Transport Forum. Decarbonising Maritime Transport. 2018. Available online: https://www.itf-oecd.org/sites/default/files/docs/decarbonising-maritime-transport-2035.pdf (accessed on 26 March 2018).
- Le Quéré, C.; Jackson, R.; Jones, M.; Smith, A.; Abernethy, S.; Andrew, R.; De-Gol, A.; Willis, D.; Shan, Y.; Canadell, J.; et al. Temporary reduction in daily global CO2 emissions during the COVID-19 forced confinement. Nat. Clim. Chang. 2020, 10, 647–653. [Google Scholar] [CrossRef]
- European Environment Agency. Final Energy Consumption by Mode of Transport. 2017. Available online: https://www.eea.europa.eu/data-and-maps/indicators/transport-final-energy-consumption-by-mode/assessment-8 (accessed on 22 November 2018).
- United Nations, Development Policy and Analysis Division. World Economic Situation and Prospects. 2012. Available online: http://www.un.org/en/development/desa/policy/wesp (accessed on 11 July 2019).
- United Kingdom, The Department for Transport. MARITIME 2050, Navigating the Future. 2019. Available online: https://assets.publishing.service.gov.uk/government/uploads/system/uploads (accessed on 16 July 2020).
- U.S. Energy Information Administration (EIA). International Energy Outlook. 2016. Available online: https://www.eia.gov/outlooks/ieo/pdf/0484(2016).pdf (accessed on 16 July 2020).
- The Department for Transport, UK. Clean Maritime Plan. 2019. Available online: https://assets.publishing.service.gov.uk/government/uploads/system/uploads/attachment_data/file/815664/clean-maritime-plan.pdf (accessed on 16 July 2020).
- Geertsma, R.; Negenborn, R.; Visser, K.; Hopman, J. Design and control of hybrid power and propulsion systems for smart ships: A review of developments. Appl. Energy 2017, 194, 30–54. [Google Scholar] [CrossRef]
- UK Marine Industries Technology Roadmap. 2015. Available online: https://www.maritimeindustries.org/write/Uploads/UKMIA%20Uploads%20-%20DO%20NOT%20DELETE/UK-Marine-Industries-Technology-Roadmap-2015.pdf (accessed on 16 July 2020).
- Skjong, E.; Volden, R.; Rødskar, E.; Molinas, M.; Johansen, T.A.; Cunningham, J. Past, Present, and Future Challenges of the Marine Vessel’s Electrical Power System. IEEE Trans. Transp. Electrif. 2016, 2, 522–537. [Google Scholar] [CrossRef] [Green Version]
- Castles, G.; Reed, G.; Bendre, A.; Pitsch, R. Economic benefits of hybrid drive propulsion for naval ships. In Proceedings of the 2009 IEEE Electric Ship Technologies Symposium, Baltimore, MD, USA, 20–22 April 2009; pp. 515–520. [Google Scholar] [CrossRef]
- EnerSys. Green at Sea: Can the US Navy Cut Its Vast Energy Footprint? 2018. Available online: https://www.naval-technology.com/features/going-green-sea-can-us-navy-cut-vast-energy-footprint/ (accessed on 18 January 2018).
- Nuhic, A.; Terzimehic, T.; Soczka-Guth, T.; Buchholz, M.; Dietmayer, K. Health diagnosis and remaining useful life prognostics of lithium-ion batteries using data-driven methods. J. Power Sources 2013, 239, 680–688. [Google Scholar] [CrossRef]
- He, W.; Pecht, M.; Flynn, D.; Dinmohammadi, F. A Physics-Based Electrochemical Model for Lithium-Ion Battery State-of-Charge Estimation Solved by an optimized Projection-Based Method and Moving-Window Filtering. Energies 2018, 11, 2120. [Google Scholar] [CrossRef] [Green Version]
- Andoni, M.; Tang, W.; Robu, V.; Flynn, D. Data analysis of battery storage systems. CIRED-Open Access Proc. J. 2017, 2017, 96–99. [Google Scholar] [CrossRef] [Green Version]
- United Kingdom, The Department for Transport. Batteries on Board Ocean-Going Vessels. Available online: https://marine.man-es.com/two-stroke/technical-papers (accessed on 16 July 2020).
- Frisk, E.; Krysander, M.; Larsson, E. Data-driven lead-acid battery prognostics using random survival forests. In Proceedings of the 2014 Annual Conference of the Prognostics and Health Management Society, Fort Worth, TX, USA, 29 September–2 October 2014; pp. 92–101. [Google Scholar]
- Solem, S.; Fagerholt, K.; Erikstad, S.; Patricksson, Ø. Optimization of diesel electric machinery system configuration in conceptual ship design. J. Mar. Sci. Technol. 2015, 20, 406–416. [Google Scholar] [CrossRef]
- Woodyard, D. Exhaust Emissions and Control; Butterworth-Heinemann: Oxford, UK, 2009. [Google Scholar]
- Flynn, D.; Lofting, D.; Fagogenis, G.; Lane, D.; Record, P.; Herd, D.; Skinn, N. Intelligent asset management for submarines and ships through embedded intelligence. In Proceedings of the Fleet Maintenance & Modernization Symposium (FMMS) 2014, Virginia Beach, VA, USA, 9–10 September 2014. [Google Scholar]
- Miguelanez-Martin, E.; Flynn, D. Embedded intelligence supporting predictive asset management in the energy sector. In Proceedings of the Asset Management Conference 2015, Washington, DC, USA, 4–5 November 2015; pp. 7–14. [Google Scholar] [CrossRef]
- Chen, C.; Pecht, M. Prognostics of lithium-ion batteries using model-based and data-driven methods. In Proceedings of the IEEE 2012 Prognostics and System Health Management Conference (PHM-2012 Beijing), Beijing, China, 23–25 May 2012; pp. 1–6. [Google Scholar] [CrossRef]
- Dong, M.; He, D. Hidden semi-Markov model-based methodology for multi-sensor equipment health diagnosis and prognosis. Eur. J. Oper. Res. 2007, 178, 858–878. [Google Scholar] [CrossRef]
- Gasperin, M.; Juricic, D.; Boskoski, P.; Vizintin, J. Model-based prognostics of gear health using stochastic dynamical models. Mech. Syst. Signal Process. 2011, 25, 537–548. [Google Scholar] [CrossRef]
- Tang, W.; Andoni, M.; Robu, V.; Flynn, D. Accurately Forecasting the Health of Energy System Assets. In Proceedings of the International Symposium on Circuits and Systems (ISCAS), Florence, Italy, 27–30 May 2018. [Google Scholar] [CrossRef]
- Brandsater, A.; Manno, G.; Vanem, E.; Glad, I.K. An application of sensor-based anomaly detection in the maritime industry. In Proceedings of the 2016 IEEE International Conference on Prognostics and Health Management (ICPHM), Ottawa, ON, Canada, 20–22 June 2016; pp. 1–8. [Google Scholar] [CrossRef]
- Dinmohammadi, F.; Flynn, D.; Bailey, C.; Pecht, M.; Yin, C.; Rajaguru, P.; Robu, V. Predicting Damage and Life Expectancy of Subsea Power Cables in Offshore Renewable Energy Applications. IEEE Access 2019, 7, 54658–54669. [Google Scholar] [CrossRef]
- Flynn, D.; Tang, W.; Roman, D.; Dickie, R.; Robu, V. Optimization of Hybrid Energy Systems for Maritime Vessels. In Proceedings of the 9th International Conference on Power Electronics, Machines and Drives, Liverpool, UK, 17–18 April 2018. [Google Scholar]
- Fagogenis, G.; Flynn, D.; Lane, D. Novel RUL prediction of assets based on the integration of auto-regressive models and an RUSBoost classifier. In Proceedings of the 2014 International Conference on Prognostics and Health Management, Fort Worth, TX, USA, 29 September–2 October 2014; pp. 1–6. [Google Scholar]
- Kirschbaum, L.; Dinmohammadi, F.; Flynn, D.; Robu, V.; Pecht, M. Failure Analysis Informing Embedded Health Monitoring of Electromagnetic Relays. In Proceedings of the 2018 3rd International Conference on System Reliability and Safety (ICSRS), Barcelona, Spain, 23–25 November 2018; pp. 261–267. [Google Scholar] [CrossRef]
- Turner, S. Russian roulette: Loading the barrel with statistics and pulling the trigger on reliability. In Proceedings of the Asset Management Conference, Sydney, Australia, 1–5 June 2009. [Google Scholar]
- Roman, D.; Dickie, R.; Flynn, D.; Robu, V. A Review of the Role of Prognostics in Predicting the Remaining Useful Life of Assets. In Proceedings of the 27th European Safety and Reliability Conference, Portoroz, Slovenia, 18–22 June 2017. [Google Scholar]
- Pecht, M.G. Prognostics and Health Management of Electronics; Wiley: Hoboken, NJ, USA, 2008. [Google Scholar]
- Pecht, M.G.; Kang, M. PHM of Subsea Cables. In Prognostics and Health Management of Electronics: Fundamentals, Machine Learning, and the Internet of Things; Wiley: Hoboken, NJ, USA, 2019; pp. 451–478. [Google Scholar]
- Kumar, S.; Pecht, M. Modeling Approaches for Prognostics and Health Management of Electronics. Int. J. Perform. Eng. 2010, 6, 467–476. [Google Scholar]
- Kirschbaum, L.; Roman, D.; Singh, G.; Bruns, J.; Robu, V.; Flynn, D. AI-driven Maintenance Support for Downhole Tools and Electronics Operated in Dynamic Drilling Environments. IEEE Access 2020, 8, 78683–78701. [Google Scholar] [CrossRef]
- Pecht, M.; Jaai, R. A prognostics and health management roadmap for information and electronics-rich systems. Microelectron. Reliab. 2010, 50, 317–323. [Google Scholar] [CrossRef]
- Michau, G.; Palmé, T.; Fink, O. Fleet PHM for Critical Systems: Bi-level Deep Learning Approach for Fault Detection. In Proceedings of the European Conference of the PHM Society, Philadelphia, PA, USA, 24–27 September 2018; pp. 401–407. [Google Scholar]
- Kanellos, F.D. Optimal Power Management with GHG Emissions Limitation in All-Electric Ship Power Systems Comprising Energy Storage Systems. IEEE Trans. Power Syst. 2014, 29, 330–339. [Google Scholar] [CrossRef]
- Shang, C.; Srinivasan, D.; Reindl, T. Economic and Environmental Generation and Voyage Scheduling of All-Electric Ships. IEEE Trans. Power Syst. 2016, 31, 4087–4096. [Google Scholar] [CrossRef]
- Kanellos, F.D.; Prousalidis, J.M.; Tsekouras, G.J. Control system for fuel consumption minimization as emission limitation of full electric propulsion ship power systems. Proc. Inst. Mech. Eng. Part M J. Eng. Marit. Environ. 2014, 228, 17–28. [Google Scholar] [CrossRef]
- Grimmelius, H.; de Vos, P.; Krijgsman, M.; van Deursen, E. Control of Hybrid Ship Drive Systems. In Proceedings of the 10th International Conference on Computer and IT Applications in the Maritime Industries, Hamburg, Germany, 2–4 May 2011; pp. 1–14. [Google Scholar]
- Vu, T.L.; Ayu, A.A.; Dhupia, J.S.; Kennedy, L.; Adnanes, A.K. Power Management for Electric Tugboats Through Operating Load Estimation. IEEE Trans. Control Syst. Technol. 2015, 23, 2375–2382. [Google Scholar] [CrossRef]
- Caledonian Maritime Assets Ltd. The Hybrid Ferries Project. Available online: http://www.cmassets.co.uk/project/hybrid-ferries-project (accessed on 16 July 2020).
- Sciberras, E.A.; Norman, R.A. Multi-objective design of a hybrid propulsion system for marine vessels. IET Electr. Syst. Transp. 2012, 2, 148–157. [Google Scholar] [CrossRef]
- Dimas, D.; Katsikas, S.; Defigos, A.; Routzomanis, A.; Mermikli, K. Wireless Modular System for Vessel Engines Monitoring, Condition Based Maintenance and Vessell’s Performance Analysis. In Proceedings of the 2nd European Conference of the Prognostics and Health Management Society, Nantes, France, 24–27 July 2014; Volume 5. [Google Scholar]
- The Swedish Club. Main Engine Damage. Available online: https://www.swedishclub.com/ (accessed on 16 July 2020).
- Niculita, O.; Nwora, O.; Skaf, Z. Towards Design of Prognostics and Health Management Solutions for Maritime Assets. In Proceedings of the 5th International Conference in Through-Life Engineering Services, Cranfield, UK, 1–2 November 2016; pp. 122–132. [Google Scholar] [CrossRef]
- Tipping, M.E. Sparse Bayesian learning and the relevance vector machine. J. Mach. Learn. Res. 2001, 1, 211–244. [Google Scholar]
- Hearst, M.A.; Dumais, S.T.; Osman, E.; Platt, J.; Scholkopf, B. Support vector machines. IEEE Intell. Syst. Appl. 1998, 13, 18–28. [Google Scholar] [CrossRef] [Green Version]
- Tipping, M.; Faul, A. Fast Marginal Likelihood Maximisation for Sparse Bayesian Models. In Proceedings of the 9th International Workshop on Artificial Intelligence and Statistics, Key West, FL, USA, 3–6 January 2003. [Google Scholar]
- Dempster, A.P.; Laird, N.M.; Rubin, D.B. Maximum likelihood from incomplete data via the EM algorithm. J. R. Stat. Soc. Ser. B 1977, 39, 1–38. [Google Scholar]
- Saha, B.; Goebel, K. Battery Data Set. National Aeronautics and Space Administration (NASA) Ames Prognostics Data Repository. 2007. Available online: https://ti.arc.nasa.gov/tech/dash/groups/pcoe/prognostic-data-repository/ (accessed on 16 July 2020).
- Liu, D.; Wang, H.; Peng, Y.; Xie, W.; Liao, H. Satellite Lithium-Ion Battery Remaining Cycle Life Prediction with Novel Indirect Health Indicator Extraction. Energies 2013, 6, 3654–3668. [Google Scholar] [CrossRef]
- Eddahech, A.; Briat, O.; Vinassa, J.M. Determination of lithium-ion battery state-of-health based on constant-voltage charge phase. J. Power Sources 2014, 258, 218–227. [Google Scholar] [CrossRef]
- Hu, C.; Jain, G.; Zhang, P.; Schmidt, C.; Gomadam, P.; Gorka, T. Data-driven method based on particle swarm optimization and k-nearest neighbor regression for estimating capacity of lithium-ion battery. Appl. Energy 2014, 129, 49–55. [Google Scholar] [CrossRef]
- Ma, S.; Jiang, M.; Tao, P.; Song, C.; Wu, J.; Wang, J.; Deng, T.; Shang, W. Temperature effect and thermal impact in lithium-ion batteries: A review. Prog. Nat. Sci. Mater. Int. 2018, 28, 653–666. [Google Scholar] [CrossRef]
- Onda, K.; Ohshima, T.; Nakayama, M.; Fukuda, K.; Araki, T. Thermal behavior of small lithium-ion battery during rapid charge and discharge cycles. J. Power Sources 2006, 158, 535–542. [Google Scholar] [CrossRef]
- EnerSys. Ohmic Measurements as a Maintenance Tool for Lead Acid Stationary Cells. Available online: http://www.newark.com/pdfs/techarticles/enersys (accessed on 16 July 2020).
- Duda, R.O.; Hart, P.E.; Stork, D.G. Pattern Classification, 2nd ed.; Wiley-Interscience: Hoboken, NJ, USA, 2000. [Google Scholar]
- Coraddu, A.; Oneto, L.; Baldi, F.; Anguita, D. Vessels Fuel Consumption: A Data Analytics Perspective to Sustainability. In Soft Computing for Sustainability Science; Cruz Corona, C., Ed.; Springer International Publishing: Cham, Switzerland, 2018; pp. 11–48. [Google Scholar] [CrossRef]
- Harris, H. Prediction of the torque and optimum operating point of diesel engines using engine speed and fuel consumption. J. Agric. Eng. Res. 1992, 53, 93–101. [Google Scholar] [CrossRef]
- Trodden, D.G.; Murphy, A.P.K. Evaluation of Emission Factors on the Estimation of NOx Formation from a Manoeuvring Ship. Transp. Res. Part D Transp. Environ. 2010, 15, 204–221. [Google Scholar] [CrossRef]
- Wang, G.; Zoerb, G. Determination of optimum working points for diesel engines. Trans. ASAE 1989, 32, 1519–1522. [Google Scholar] [CrossRef]
- Lin, C.C.; Peng, H.; Grizzle, J.W.; Kang, J.M. Power management strategy for a parallel hybrid electric truck. IEEE Trans. Control Syst. Technol. 2003, 11, 839–849. [Google Scholar] [CrossRef] [Green Version]
- Newman, N. Hybrid Ships Take to the High Seas. Available online: https://eandt.theiet.org/content/articles/2019/01/hybrid-ships-take-to-the-high-seas (accessed on 17 January 2019).



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Rated Power [kW (BHP)] | Speed [rpm] | No. of Cylinders | Bore/Stroke [mm (in)] |
|---|---|---|---|
| 900 (1205) | 2250 | 10 | 135/156 (5.4/6.1) |
| Battery No. | Starting Point | True RUL | Predicted RUL | 90% CI | AE | RE |
|---|---|---|---|---|---|---|
| 5 | 40 | 124 | 115 | 105–139 | 9 | 7.2 |
| 5 | 60 | 124 | 119 | 116–129 | 5 | 4.0 |
| 5 | 80 | 124 | 120 | 119–125 | 4 | 3.2 |
| Battery No. | Starting Point | True RUL | Predicted RUL | 90% CI | AE | RE (%) |
|---|---|---|---|---|---|---|
| 6 | 40 | 112 | 103 | 95–107 | 9 | 8 |
| 6 | 60 | 112 | 102.5 | 99.5–109 | 9.5 | 8.4 |
| 6 | 80 | 112 | 107 | 105–113 | 5 | 4.4 |
| 7 | 40 | 166 | 158 | 152–171 | 8 | 4.8 |
| 7 | 60 | 166 | 159 | 156–169 | 7 | 4.2 |
| 7 | 80 | 166 | 159 | 154–166 | 7 | 4.2 |
| 18 | 40 | 132 | 122 | 117–133 | 10 | 7.5 |
| 18 | 60 | 132 | 124 | 119–134 | 8 | 6.1 |
| 18 | 80 | 132 | 126 | 129–133 | 6 | 4.5 |
| Times (ms) | 100% | 95% | 90% | 85% | 80% | 75% | 70% |
|---|---|---|---|---|---|---|---|
| 1.55 | 0.006 | 0.008 | 0.0075 | 0.008 | 0.006 | 0.0078 | 0.0068 |
| 73.55 | 0.005 | 0.008 | 0.0073 | 0.007 | 0.0058 | 0.0077 | 0.0038 |
| 76.75 | 0.006 | 0.005 | 0.0078 | 0.011 | 0.004 | 0.009 | 0.0073 |
| 78.35 | 0.007 | 0.0098 | 0.0085 | 0.0083 | 0.004 | 0.0085 | 0.006 |
| 172.8 | −0.28 | −0.16 | −0.15 | −0.14 | −0.132 | −0.127 | −0.128 |
| 175.9 | −0.28 | −0.16 | −0.149 | −0.14 | −0.138 | −0.129 | −0.127 |
| 177.6 | −0.284 | −0.166 | −0.151 | −0.144 | −0.135 | −0.135 | −0.129 |
| 271.9 | −0.147 | −0.034 | −0.029 | −0.123 | −0.019 | −0.018 | −0.013 |
| Term | Coefficient |
|---|---|
| A | 387.6 |
| B | −0.2368 |
| C | −0.5582 |
| D | |
| E | |
| F | |
| G | |
| H | |
| I |
| Term | Coefficient |
|---|---|
| A | 69 |
| B | 0.000004586 |
| C | 0.000208 |
| D | 0.09645 |
| E | 0.000081357 |
| F | 0.021415 |
| G | 1.91517 |
| Dataset | (kWh) | (kW) | (kW) | (kWh) |
|---|---|---|---|---|
| 29.06.16 | 343 | 228 | 818 | 5.3 |
| 07.12.16 | 176 | 137 | 749 | 1.5 |
| Diesel Engine Fuel Consumption [L/h] | Hybrid System Fuel Consumption [L/h] | Fuel Consumption Savings [L/h] | |
|---|---|---|---|
| First Run (Power Demand of 175 kWh) | 187.6 | 29.6 | 158 |
| Second Run (Power Demand of 342 kWh) | 197 | 53.3 | 143.7 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tang, W.; Roman, D.; Dickie, R.; Robu, V.; Flynn, D. Prognostics and Health Management for the Optimization of Marine Hybrid Energy Systems. Energies 2020, 13, 4676. https://doi.org/10.3390/en13184676
Tang W, Roman D, Dickie R, Robu V, Flynn D. Prognostics and Health Management for the Optimization of Marine Hybrid Energy Systems. Energies. 2020; 13(18):4676. https://doi.org/10.3390/en13184676
Chicago/Turabian StyleTang, Wenshuo, Darius Roman, Ross Dickie, Valentin Robu, and David Flynn. 2020. "Prognostics and Health Management for the Optimization of Marine Hybrid Energy Systems" Energies 13, no. 18: 4676. https://doi.org/10.3390/en13184676
APA StyleTang, W., Roman, D., Dickie, R., Robu, V., & Flynn, D. (2020). Prognostics and Health Management for the Optimization of Marine Hybrid Energy Systems. Energies, 13(18), 4676. https://doi.org/10.3390/en13184676