Novel Improved Adaptive Neuro-Fuzzy Control of Inverter and Supervisory Energy Management System of a Microgrid

 , , and
, , and 
Abstract
:1. Introduction
2. Structure and Control of Microgrid
2.1. Structure of the System
2.2. Control of PV
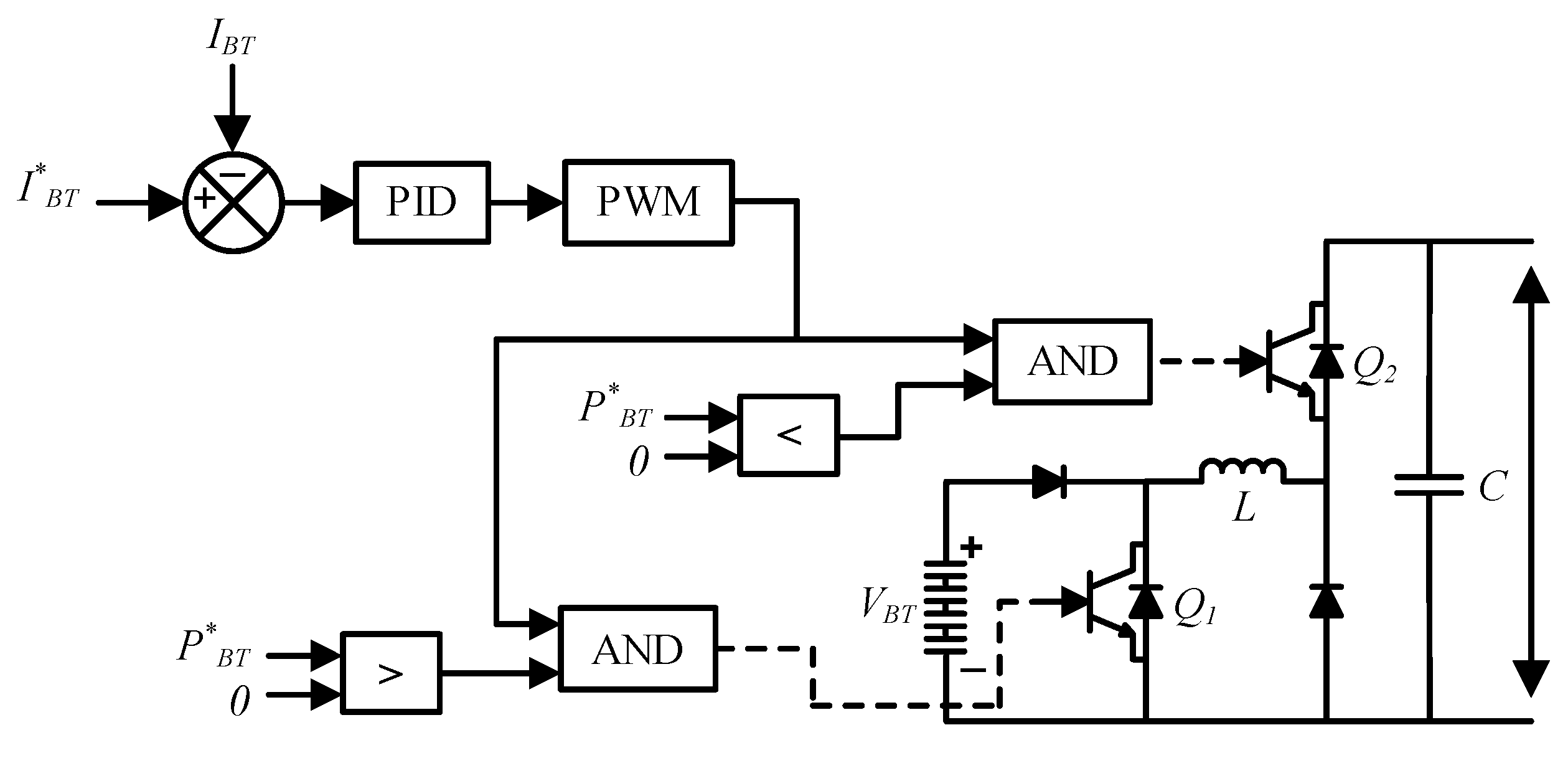
2.3. Control of Ultra-Capacitor/Battery
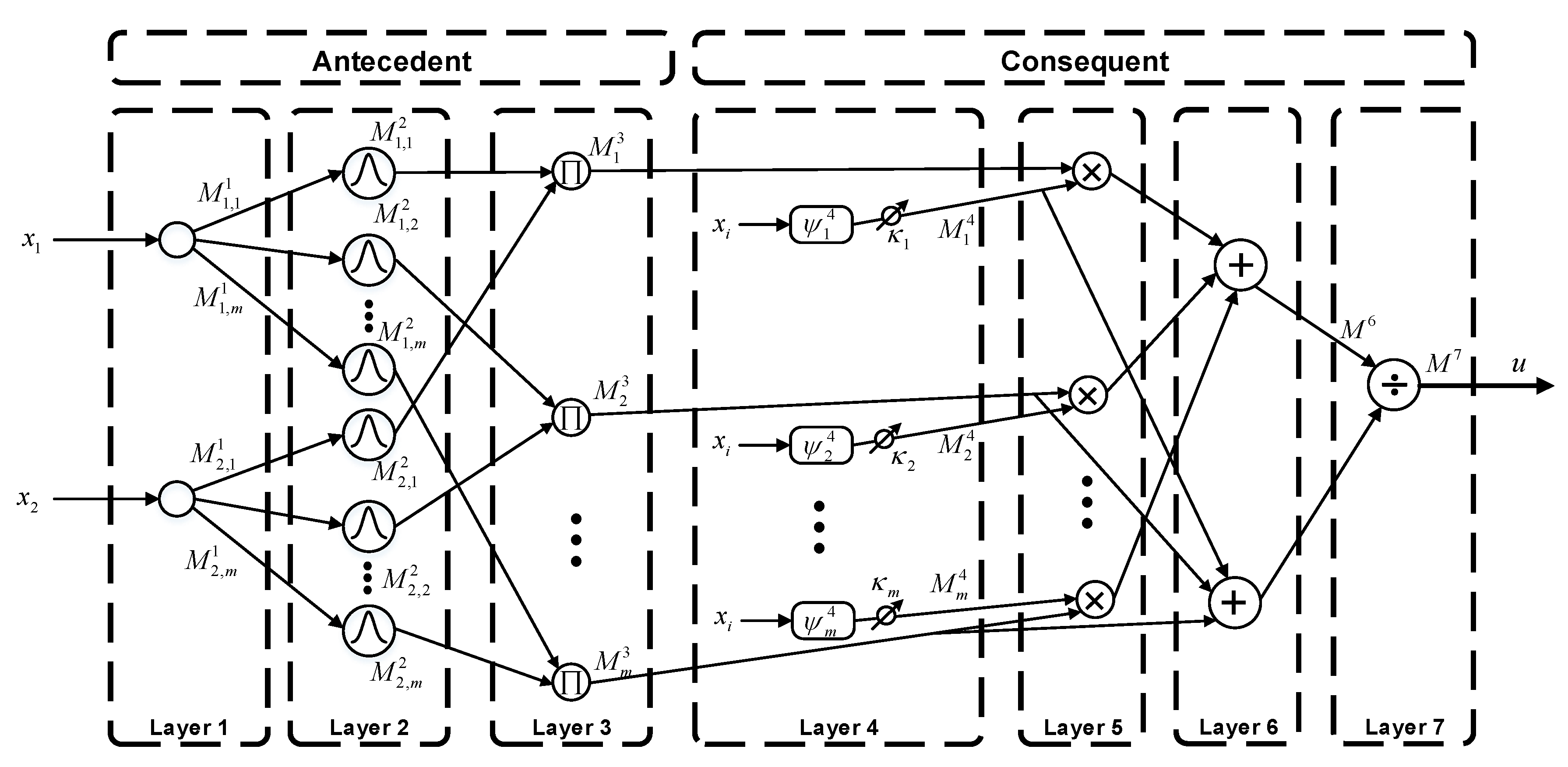
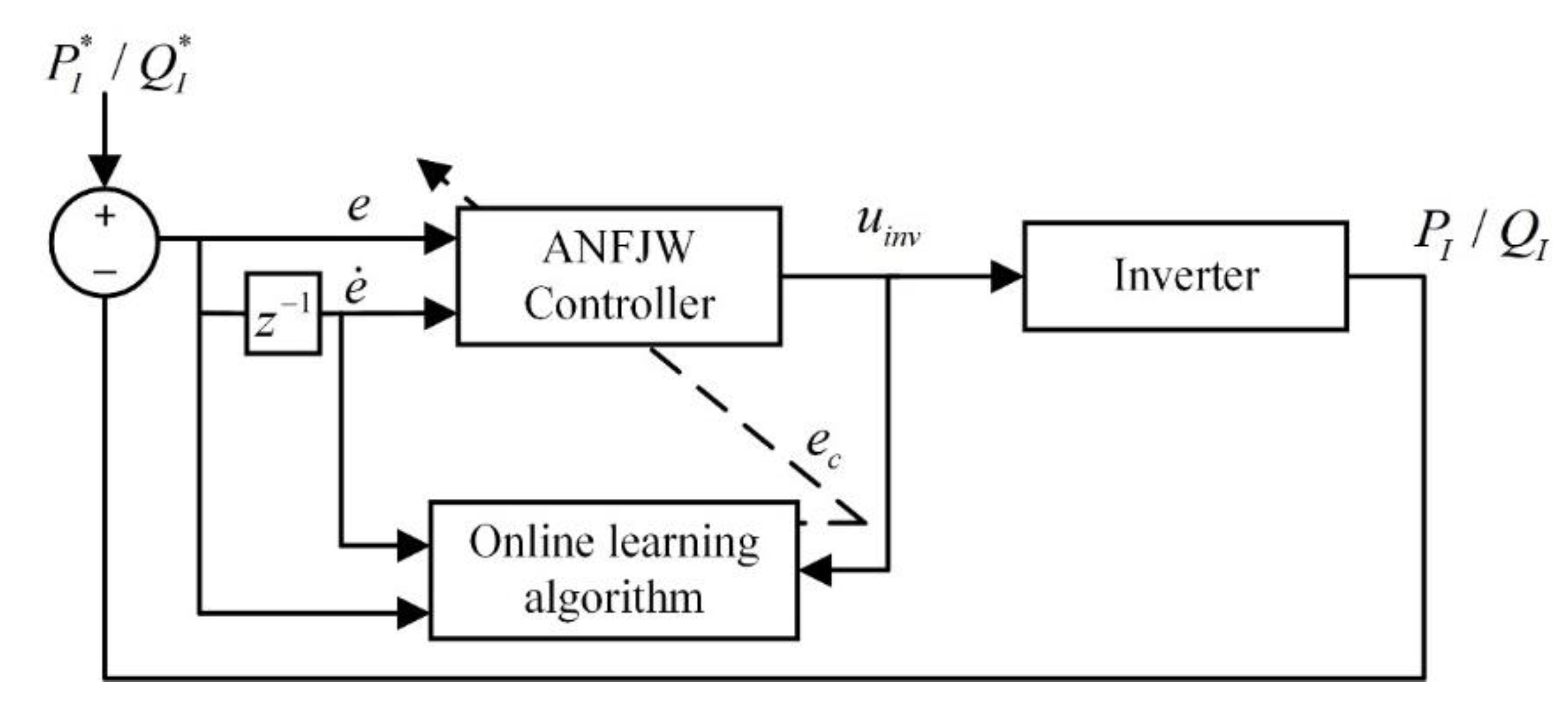
2.4. Control of Inverter
- First Layer:
- Second Layer:
- Third Layer:
- Fourth Layer:
- Fifth Layer:
- Sixth Layer:
- Seven Layer:
3. Energy Management and Supervisory Control System
- All of the control signals are generated, i.e., PPV, PG, PL, PB, PU, SB, and SU.
- Check , go to 1 if this condition is true, and if not then follow next step.
- Check PL > , if it is true, go to step 9, and if not then check the next condition.
- Check SB > 20%, if it is true, then discharge the battery, and go to next step, otherwise go to step 2.
- Check the condition , if this is true, then go to the next step, otherwise go to step 6.
- Check SU > 20%, if it is true, then discharge the UC, and go to the next step, otherwise go to step 8.
- Check the condition , if it is true, then go to the next step, otherwise go to step 1.
- Using all of the remaining deficient power reference to the grid and go to step 1.
- Check SB > 90%, if it is not true, then charge the battery and go to the next step, otherwise go to step 11.
- Check the condition , if true, then go to the next step, otherwise go to step 1.
- Check SU > 90%, if it is not true, then charge the UC and go to the next step, otherwise go to step 13.
- Check the condition , if true, then go to the next step, otherwise step 1.
- Provide all of the net surplus power to the utility grid and go to step 1.
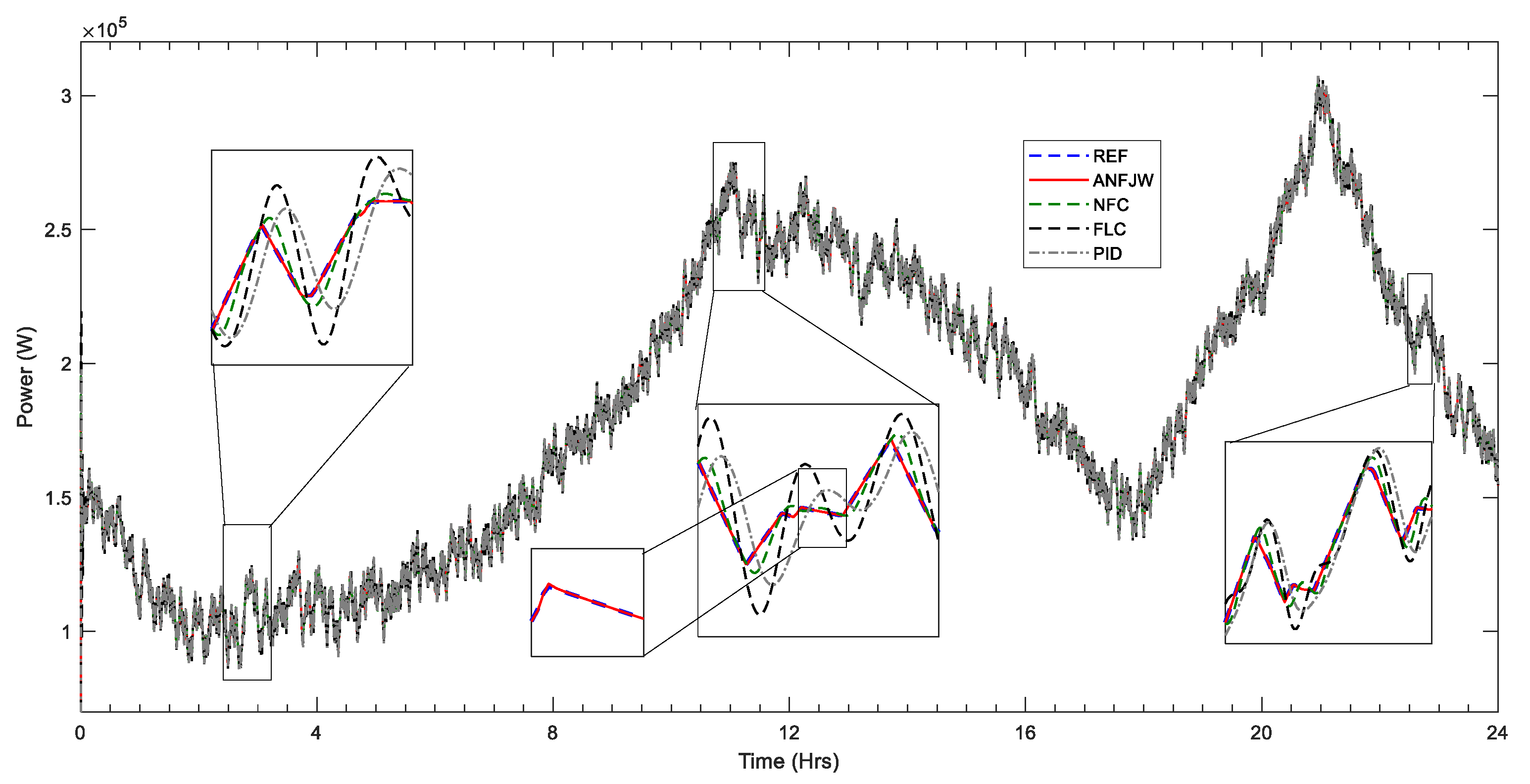
4. Simulations
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| ANFJW | Adaptive neuro-fuzzy Jacobi wavelet |
| EMSCS | Energy management and supervisory control system |
| FLC | Fuzzy logic controller |
| GMF | Gaussian membership function |
| IAE | Integral absolute error |
| IC | Incremental conductance |
| ISE | Integral square error |
| ITAE | Integral time absolute error |
| ITSE | Integral time square error |
| MPPT | Maximum power point tracking |
| MRE | Mean relative error |
| NF | Neuro-fuzzy |
| NN | Neural network |
| PV | Photovoltaic |
| RES | Renewable energy sources |
| THD | Total harmonic distortion |
| UC | Ultra-capacitor |
References
- Ozdemir, S.; Kaplan, O.; Sefa, I.; Altin, N. Fuzzy PI controlled inverter for grid interactive renewable energy systems. IET Renew. Power Gener. 2015, 9, 729–738. [Google Scholar]
- Hossain, M.; Pota, H.; Issa, W.; Hossain, M.; Hossain, M.A.; Pota, H.R.; Issa, W.; Hossain, M.J. Overview of AC Microgrid Controls with Inverter-Interfaced Generations. Energies 2017, 10, 1300. [Google Scholar] [CrossRef]
- Altin, N.; Ozdemir, S. Three-phase three-level grid interactive inverter with fuzzy logic based maximum power point tracking controller. Energy Convers. Manag. 2013, 69, 17–26. [Google Scholar] [CrossRef]
- Alsayari, N.; Chilipi, R.; Al Hosani, K.; Almaskari, F. Grid synchronization and control of distributed generation unit with flexible load compensation capabilities using multi-output LMS-filter. Int. J. Electr. Power Energy Syst. 2017, 93, 253–265. [Google Scholar] [CrossRef]
- Al Sayari, N.; Chilipi, R.; Barara, M. An adaptive control algorithm for grid-interfacing inverters in renewable energy based distributed generation systems. Energy Convers. Manag. 2016, 111, 443–452. [Google Scholar] [CrossRef]
- Cecati, C.; Dell’Aquila, A.; Liserre, M.; Monopoli, V.G. Design of H-bridge multilevel active rectifier for traction systems. IEEE Trans. Ind. Appl. 2003, 39, 1541–1550. [Google Scholar] [CrossRef]
- Kazźmierkowski, M.P.; Krishnan, R.; Blaabjerg, F. Control in Power Electronics: Selected Problems; Academic Press: San Diego, CA, USA, 2002; ISBN 9780080490786. [Google Scholar]
- Yuan, X.; Merk, W.; Stemmler, H.; Allmeling, J. Stationary-frame generalized integrators for current control of active power filters with zero steady-state error for current harmonics of concern under unbalanced and distorted operating conditions. IEEE Trans. Ind. Appl. 2002, 38, 523–532. [Google Scholar] [CrossRef]
- Ren, X.; Lyu, Z.; Li, D.; Zhang, Z.; Zhang, S. Synchronization signal extraction method based on enhanced DSSOGI-FLL in power grid distortion. Syst. Sci. Control Eng. 2018, 6, 305–313. [Google Scholar] [CrossRef] [Green Version]
- Li, S.; Haskew, T.A.; Hong, Y.K.; Xu, L. Direct-current vector control of three-phase grid-connected rectifier-inverter. Electr. Power Syst. Res. 2011, 81, 357–366. [Google Scholar] [CrossRef]
- Sędłak, M.; Styński, S.; Kaźmierkowski, M.P.; Malinowski, M. Three-level four-leg flying capacitor converter for renewable energy sources. Przeglad Elektrotechniczny 2012, 88, 6–11. [Google Scholar]
- Chandran, B.P.; Selvakumar, A.I.; Mathew, F.M. Integrating multilevel converters application on renewable energy sources—A survey. J. Renew. Sustain. Energy 2018, 10, 065502. [Google Scholar] [CrossRef]
- Verdugo, C.; Kouro, S.; Rojas, C.A.; Perez, M.A.; Meynard, T.; Malinowski, M. Five-Level T-type Cascade Converter for Rooftop Grid-Connected Photovoltaic Systems. Energies 2019, 12, 1743. [Google Scholar] [CrossRef] [Green Version]
- Mishra, N.; Singh, B. Solar PV Grid Interfaced System with Neutral Point Clamped Converter for Power Quality Improvement. J. Inst. Eng. Ser. B 2018, 99, 605–612. [Google Scholar] [CrossRef]
- Carrasco, J.M.; Franquelo, L.G.; Bialasiewicz, J.T.; Galvan, E.; PortilloGuisado, R.C.; Prats, M.A.M.; Leon, J.I.; Moreno-Alfonso, N. Power-Electronic Systems for the Grid Integration of Renewable Energy Sources: A Survey. IEEE Trans. Ind. Electron. 2006, 53, 1002–1016. [Google Scholar] [CrossRef]
- Shadmand, M.B.; Li, X.; Balog, R.S.; Rub, H.A. Model predictive control of grid-tied photovoltaic systems: Maximum power point tracking and decoupled power control. In Proceedings of the 2015 First Workshop on Smart Grid and Renewable Energy (SGRE), Doha, Qatar, 22–23 March 2015; pp. 1–6. [Google Scholar]
- Hu, J.; Zhu, J.; Dorrell, D.G. Model-predictive control of grid-connected inverters for PV systems with flexible power regulation and switching frequency reduction. IEEE Trans. Ind. Appl. 2015, 51, 587–594. [Google Scholar] [CrossRef]
- Cecati, C.; Ciancetta, F.; Siano, P. A Multilevel Inverter for Photovoltaic Systems with Fuzzy Logic Control. IEEE Trans. Ind. Electron. 2010, 57, 4115–4125. [Google Scholar] [CrossRef]
- Hannan, M.A.; Ghani, Z.A.; Hoque, M.M.; Ker, P.J.; Hussain, A.; Mohamed, A. Fuzzy Logic Inverter Controller in Photovoltaic Applications: Issues and Recommendations. IEEE Access 2019, 7, 24934–24955. [Google Scholar] [CrossRef]
- Mao, Y.; Yang, Y. Backstepping sliding mode control of grid-connected inverters. Int. J. Electron. Lett. 2017, 5, 314–326. [Google Scholar] [CrossRef]
- Sun, Y.; Li, S.; Lin, B.; Fu, X.; Ramezani, M.; Jaithwa, I. Artificial Neural Network for Control and Grid Integration of Residential Solar Photovoltaic Systems. IEEE Trans. Sustain. Energy 2017, 8, 1484–1495. [Google Scholar] [CrossRef]
- Altin, N.; Sefa, İ. dSPACE based adaptive neuro-fuzzy controller of grid interactive inverter. Energy Convers. Manag. 2012, 56, 130–139. [Google Scholar] [CrossRef]
- Vazquez, S.; Leon, J.I.; Franquelo, L.G.; Carrasco, J.M.; Martinez, O.; Rodriguez, J.; Cortes, P.; Kouro, S. Model Predictive Control with constant switching frequency using a Discrete Space Vector Modulation with virtual state vectors. In Proceedings of the 2009 IEEE International Conference on Industrial Technology, Gippsland, VIC, Australia, 10–13 February 2009; pp. 1–6. [Google Scholar]
- Lee, H.; Utkin, V.I. Chattering suppression methods in sliding mode control systems. Annu. Rev. Control 2007, 31, 179–188. [Google Scholar] [CrossRef]
- Liu, Y.-H.; Liu, C.-L.; Huang, J.-W.; Chen, J.-H. Neural-network-based maximum power point tracking methods for photovoltaic systems operating under fast changing environments. Sol. Energy 2013, 89, 42–53. [Google Scholar] [CrossRef]
- Badar, R.; Khan, L. Adaptive Neuro Fuzzy Wavelet Based SSSC Damping Control Paradigm. In Proceedings of the 2012 10th International Conference on Frontiers of Information Technology, Islamabad, Pakistan, 17–19 December 2012; pp. 101–106. [Google Scholar]
- Kamal, T.; Karabacak, M.; Hassan, S.Z.; Fernández-Ramírez, L.M.; Roasto, I.; Khan, L. An indirect adaptive control paradigm for wind generation systems. In Advanced Control and Optimization Paradigms for Wind Energy Systems; Springer: Singapore, 2019; pp. 235–257. [Google Scholar]
- Hassan, S.; Li, H.; Kamal, T.; Arifoğlu, U.; Mumtaz, S.; Khan, L. Neuro-Fuzzy Wavelet Based Adaptive MPPT Algorithm for Photovoltaic Systems. Energies 2017, 10, 394. [Google Scholar] [CrossRef] [Green Version]
- Banakar, A.; Azeem, M.F. Artificial wavelet neural network and its application in neuro-fuzzy models. Appl. Soft Comput. J. 2008, 8, 1463–1485. [Google Scholar] [CrossRef]
- Yusuf, O.; Yilmaz, S. An Adaptive Fuzzy Wavelet Network with Gradient Learning for Nonlinear Function Approximation. J. Intell. Syst. 2014, 23, 201–212. [Google Scholar]
- Hassan, S.Z.; Kamal, T.; Mumtaz, S.; Khan, L. An online self recurrent direct adaptive neuro-fuzzy wavelet based control of photovoltaic systems. In Solar Photovoltaic Power Plants. Advanced Control and Optimization Techniques; Springer: Singapore, 2019; pp. 233–250. [Google Scholar]
- Kumar, S.A.; Subathra, M.S.P.; Kumar, N.M.; Malvoni, M.; Sairamya, N.J.; George, S.T.; Suviseshamuthu, E.S.; Chopra, S.S. A Novel Islanding Detection Technique for a Resilient Photovoltaic-Based Distributed Power Generation System Using a Tunable-Q Wavelet Transform and an Artificial Neural Network. Energies 2020, 13, 4238. [Google Scholar] [CrossRef]
- Frizzo Stefenon, S.; Zanetti Freire, R.; dos Santos Coelho, L.; Meyer, L.H.; Bartnik Grebogi, R.; Gouvêa Buratto, W.; Nied, A. Electrical Insulator Fault Forecasting Based on a Wavelet Neuro-Fuzzy System. Energies 2020, 13, 484. [Google Scholar] [CrossRef] [Green Version]
- Zhu, H.; Li, X.; Sun, Q.; Nie, L.; Yao, J.; Zhao, G. A Power Prediction Method for Photovoltaic Power Plant Based on Wavelet Decomposition and Artificial Neural Networks. Energies 2016, 9, 11. [Google Scholar] [CrossRef] [Green Version]
- De Giorgi, M.G.; Campilongo, S.; Ficarella, A.; Congedo, P.M. Comparison Between Wind Power Prediction Models Based on Wavelet Decomposition with Least-Squares Support Vector Machine (LS-SVM) and Artificial Neural Network (ANN). Energies 2014, 7, 5251–5272. [Google Scholar] [CrossRef]
- Kamal, T.; Karabacak, M.; Blaabjerg, F.; Hassan, S.Z.; Fernández-Ramírez, L.M. A Novel Lyapunov Stable Higher Order B-spline Online Adaptive Control Paradigm of Photovoltaic Systems. Sol. Energy 2019, 194, 530–540. [Google Scholar] [CrossRef]
- Tan, K.T.; So, P.L.; Chu, Y.C.; Chen, M.Z.Q. Coordinated Control and Energy Management of Distributed Generation Inverters in a Microgrid. IEEE Trans. Power Deliv. 2013, 28, 704–713. [Google Scholar] [CrossRef] [Green Version]
- Zhu, D.; Yang, R.; Hug-Glanzmann, G. Managing microgrids with intermittent resources: A two-layer multi-step optimal control approach. In Proceedings of the North American Power Symposium 2010, Arlington, TX, USA, 26–28 September 2010. [Google Scholar]
- Chen, C.; Duan, S.; Cai, T.; Liu, B.; Hu, G. Optimal allocation and economic analysis of energy storage system in microgrids. IEEE Trans. Power Electron. 2011, 26, 2762–2773. [Google Scholar] [CrossRef]




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Description |
|---|---|
| Local Load Power | |
| Grid Power | |
| Battery Power | |
| Ultra-capacitor Power | |
| PV Power | |
| SoC of Battery | |
| SoC of UC | |
| Discharging Reference Power of battery | |
| Charging Reference Power of Battery | |
| UC Discharging Reference Power | |
| UC Charging Reference Power | |
| Grid Reference Power |
| Controllers | Output Power | THD (% Age) | IAE (p.u) | ITAE (p.u) | ISE (p.u) | ITSE (p.u) | |
|---|---|---|---|---|---|---|---|
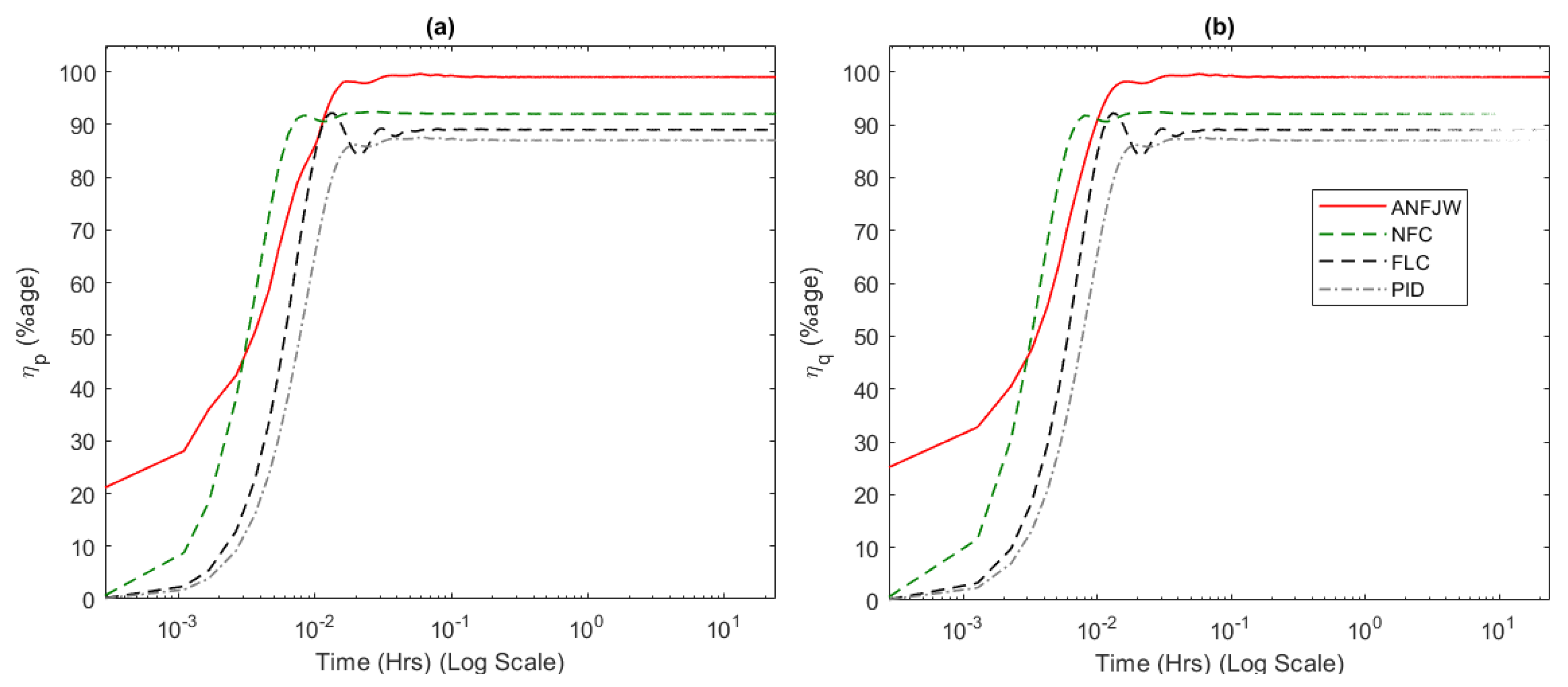
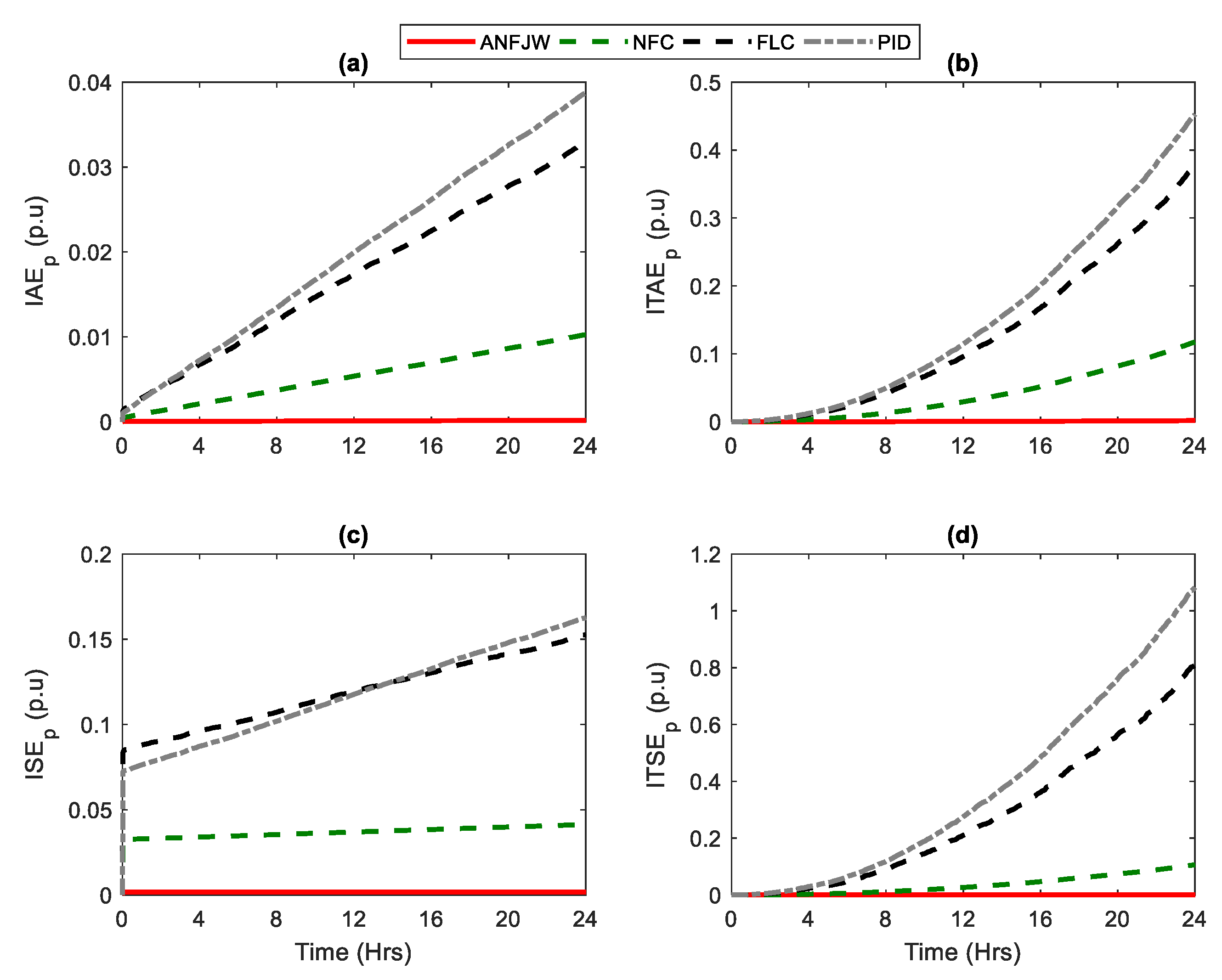
| ANFJW | Active | 99.05 | 2.37 | 0.00017 | 0.00166 | 0.00166 | 0.00052 |
| Reactive | 99.08 | 0.00012 | 0.00128 | 0.00093 | 0.00003 | ||
| NFC | Active | 92.17 | 3.63 | 0.0102 | 0.1169 | 0.0413 | 0.1052 |
| Reactive | 92.25 | 0.0076 | 0.0879 | 0.0233 | 0.0597 | ||
| FLC | Active | 89.11 | 6.54 | 0.0329 | 0.3758 | 0.1526 | 0.8016 |
| Reactive | 89.18 | 0.0247 | 0.2829 | 0.0864 | 0.4573 | ||
| PID | Active | 86.94 | 8.96 | 0.0386 | 0.4526 | 0.1619 | 1.078 |
| Reactive | 87.04 | 0.0290 | 0.3394 | 0.0917 | 0.6097 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kamal, T.; Karabacak, M.; Perić, V.S.; Hassan, S.Z.; Fernández-Ramírez, L.M. Novel Improved Adaptive Neuro-Fuzzy Control of Inverter and Supervisory Energy Management System of a Microgrid. Energies 2020, 13, 4721. https://doi.org/10.3390/en13184721
Kamal T, Karabacak M, Perić VS, Hassan SZ, Fernández-Ramírez LM. Novel Improved Adaptive Neuro-Fuzzy Control of Inverter and Supervisory Energy Management System of a Microgrid. Energies. 2020; 13(18):4721. https://doi.org/10.3390/en13184721
Chicago/Turabian StyleKamal, Tariq, Murat Karabacak, Vedran S. Perić, Syed Zulqadar Hassan, and Luis M. Fernández-Ramírez. 2020. "Novel Improved Adaptive Neuro-Fuzzy Control of Inverter and Supervisory Energy Management System of a Microgrid" Energies 13, no. 18: 4721. https://doi.org/10.3390/en13184721
APA StyleKamal, T., Karabacak, M., Perić, V. S., Hassan, S. Z., & Fernández-Ramírez, L. M. (2020). Novel Improved Adaptive Neuro-Fuzzy Control of Inverter and Supervisory Energy Management System of a Microgrid. Energies, 13(18), 4721. https://doi.org/10.3390/en13184721