Model-Independent Derivative Control Delay Compensation Methods for Power Systems





Abstract
:1. Introduction
1.1. Motivation
1.2. Literature Review
1.2.1. Communication Delays in Power Systems
1.2.2. Compensation of Delays in Control Loops
1.2.3. Compensation of Delays in on-Line Monitoring
1.2.4. D-Term-Based Delay Compensation
1.3. Contributions
- A discussion on the maximum fidelity that the two delay-compensation methods for wide-area controllers can achieve is presented.
- A technique to solve small-signal stability analysis of power systems with inclusion of either constant or realistically-modeled communication delays in the derivatives of the state variables is proposed.
- A new theorem on the stability of the NTDS is derived.
- A thorough comparison of the performance of PD and predictor-based delay compensation methods in power systems, including both open-loop and closed-loop scenarios, is shown.
1.4. Organization
2. D-Based Delay Compensation Methods and Small Signal Stability
2.1. Power System Model with Inclusion of Delays
2.2. PD Delay Compensation
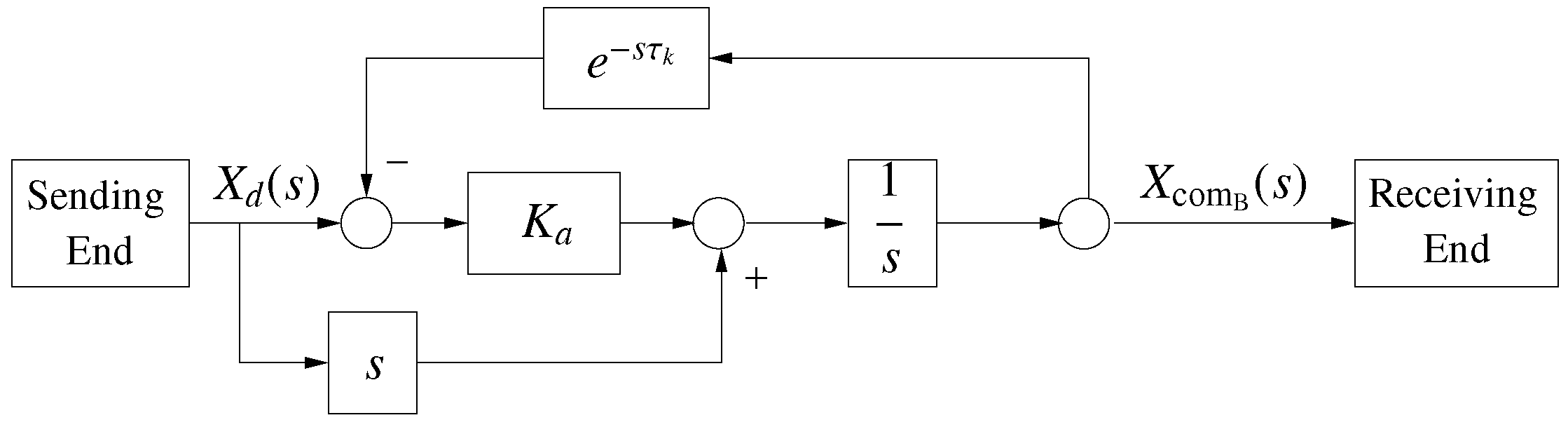
2.3. Predictor-Based Delay Compensation
2.4. Power System Model with Inclusion of Delay Compensation
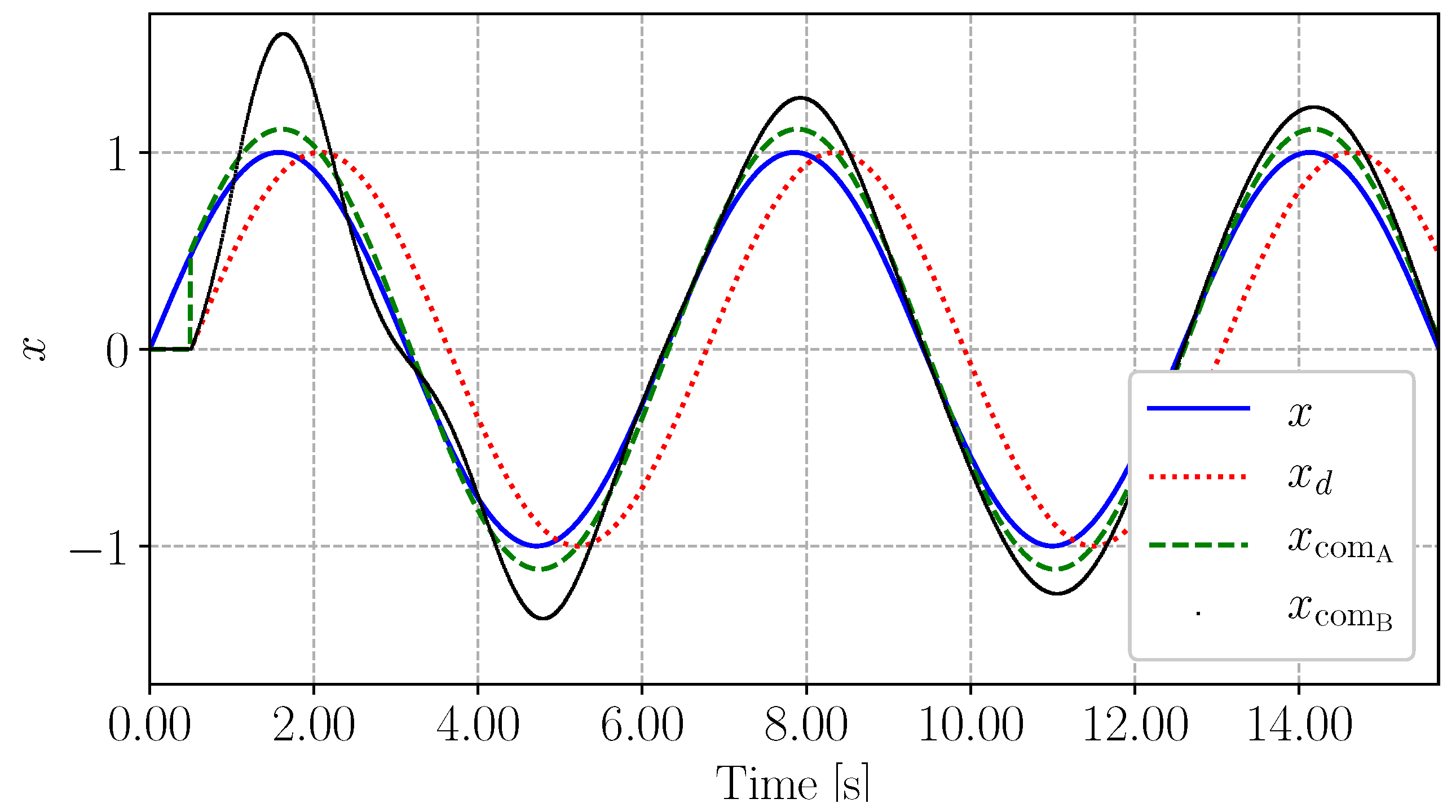
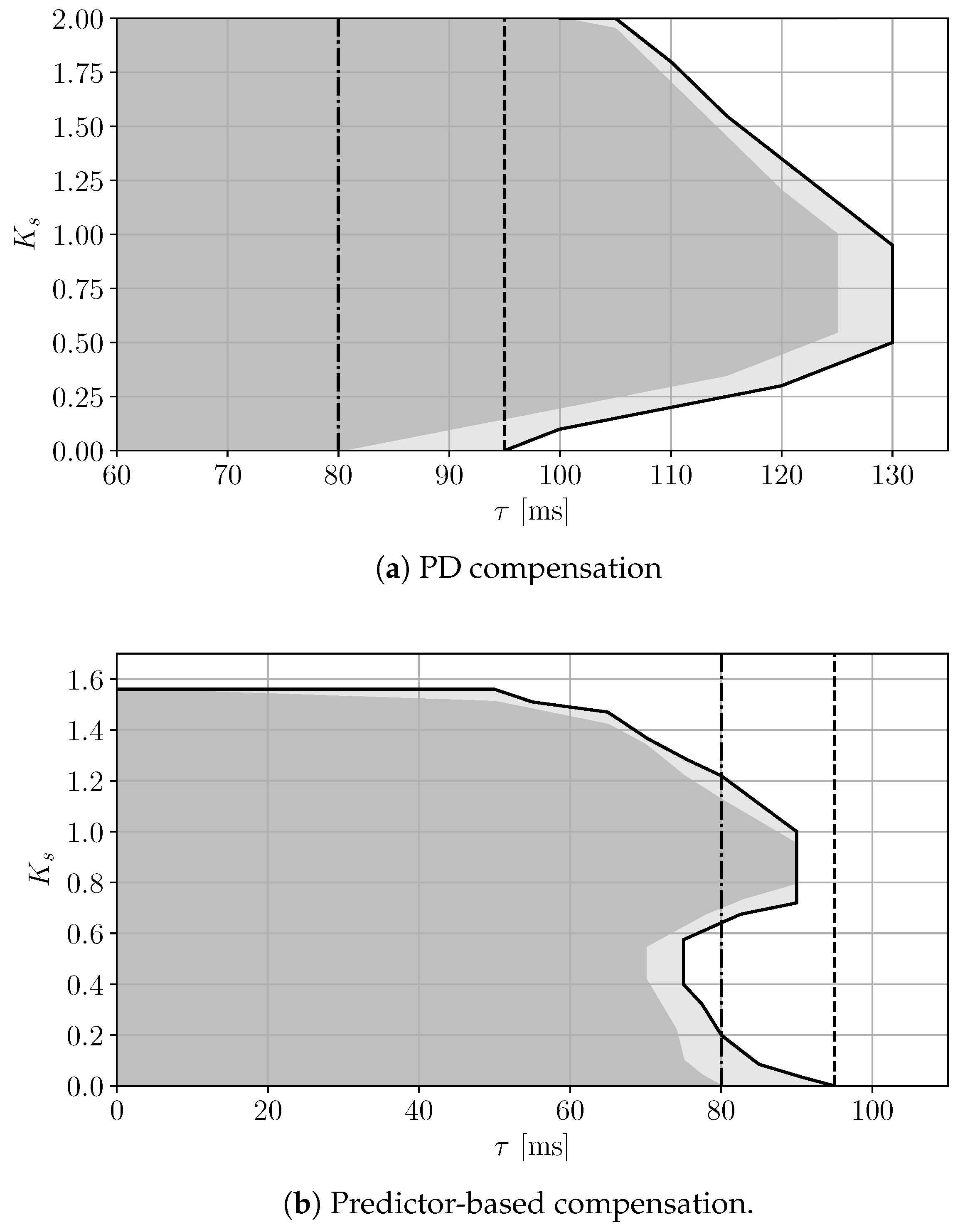
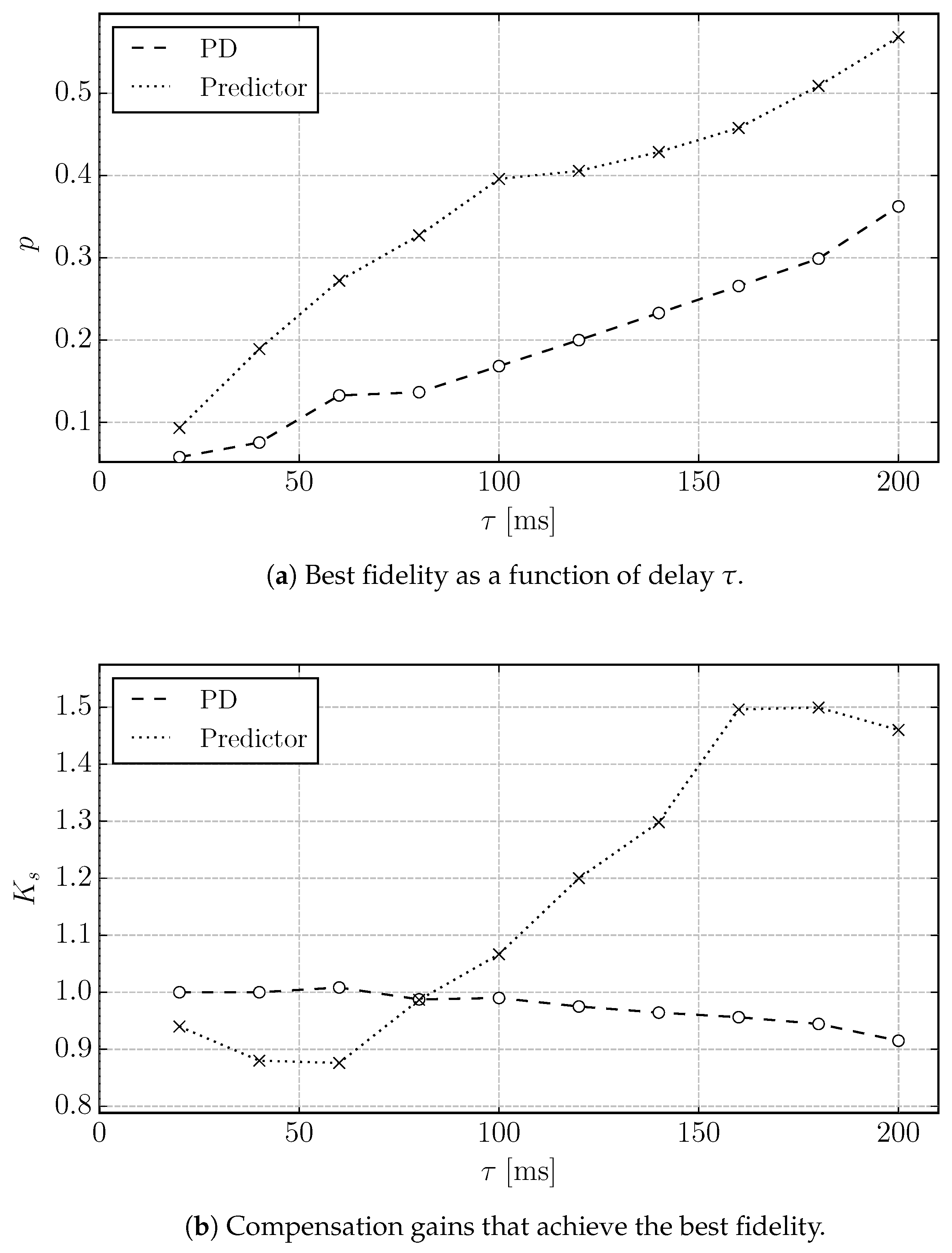
3. Fidelity Comparison
Illustrative Example
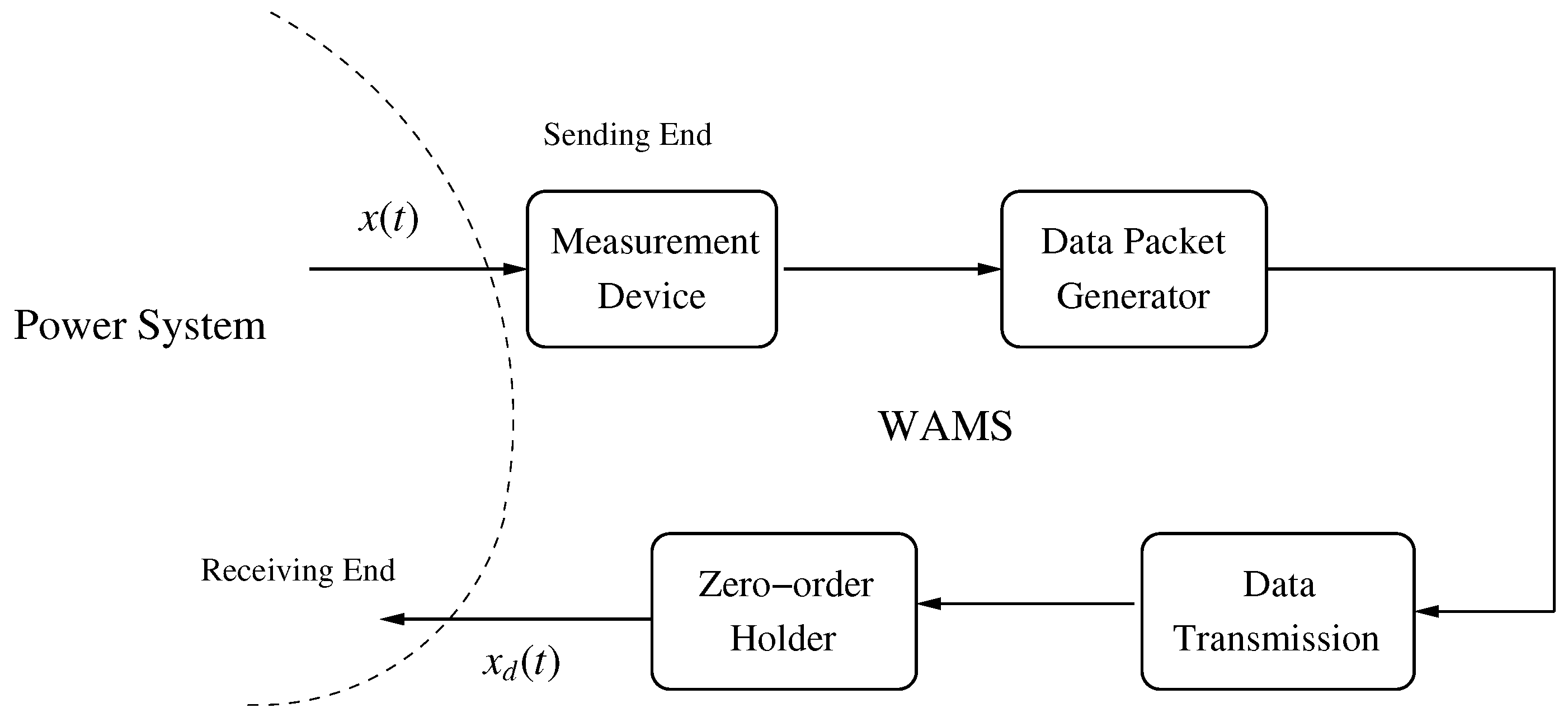
4. Wide-Area Measurement Delay Compensation
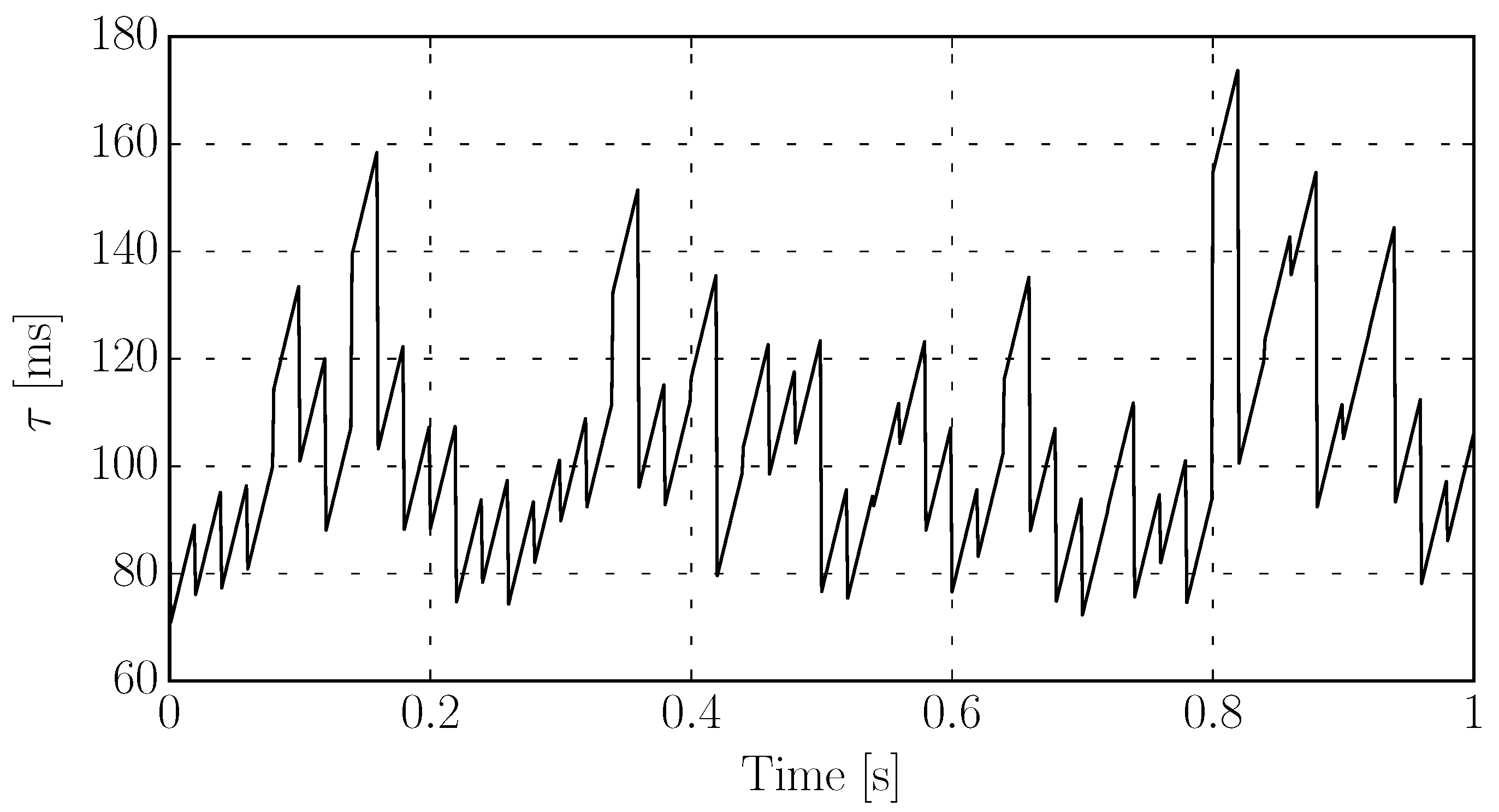
4.1. Wide-Area Measurement Delay Model
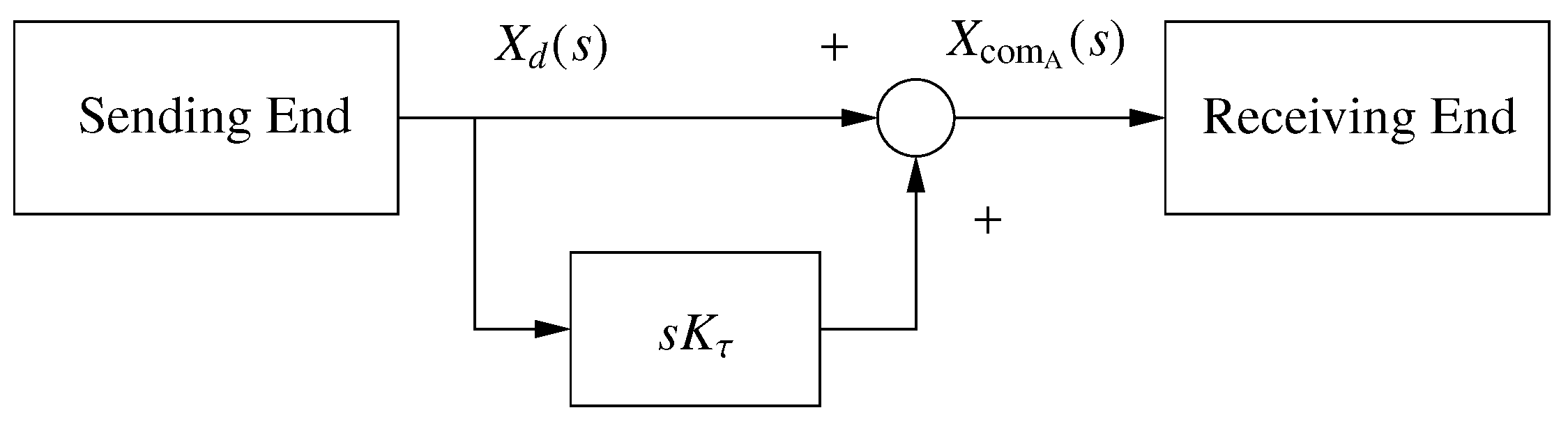
4.2. Implementation of the Delay Compensation
5. Case Study
5.1. IEEE 14-Bus System
5.1.1. Constant Delay
5.1.2. WAMS Delay
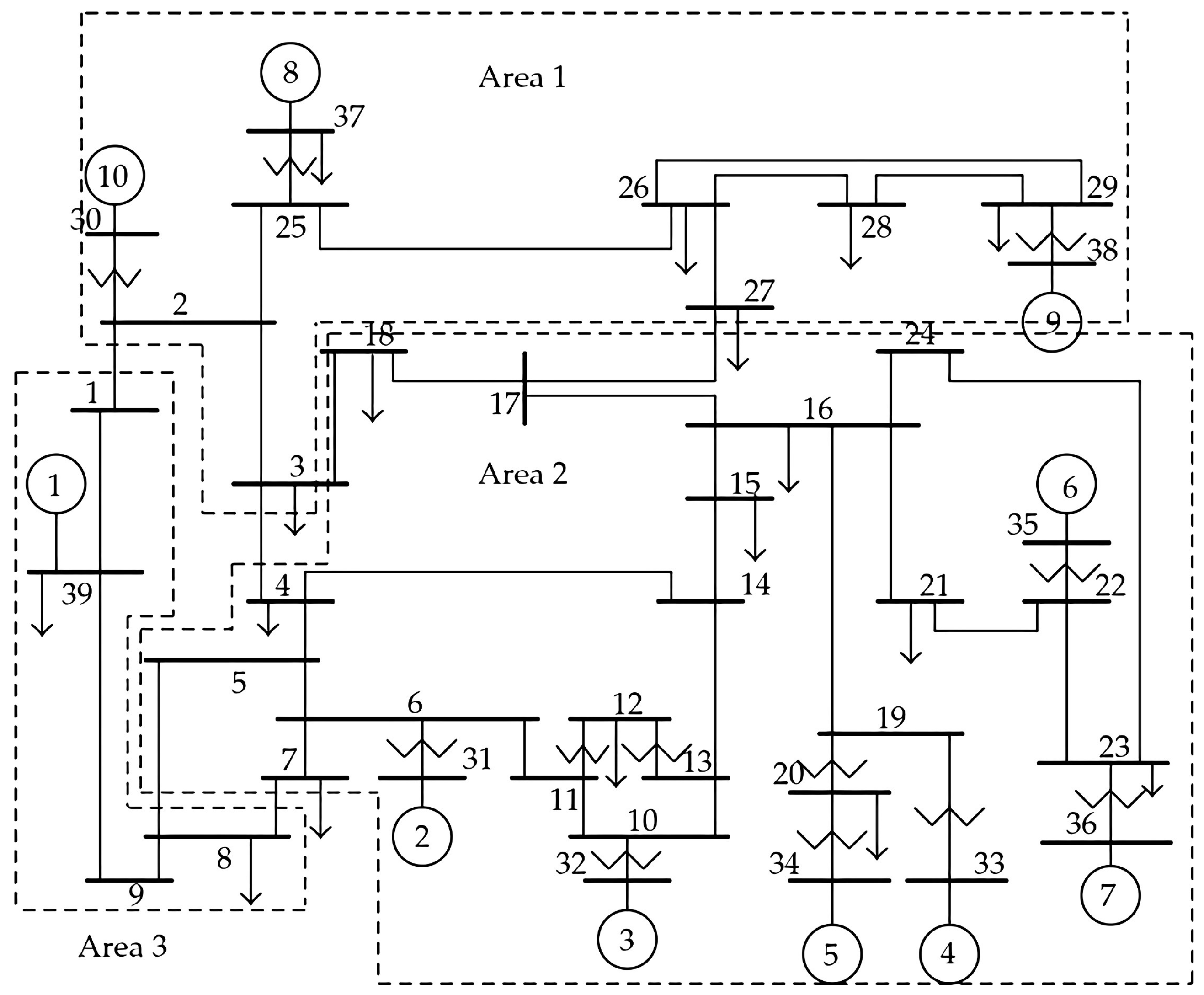
5.2. New England System
5.2.1. Constant Delay
5.2.2. WAMS Delay
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
Appendix A
References
- Zhang, Y.; Bose, A. Design of wide-area damping controllers for interarea oscillations. IEEE Trans. Power Syst. 2008, 23, 1136–1143. [Google Scholar] [CrossRef]
- Mokhtari, M.; Aminifar, F.; Nazarpour, D.; Golshannavaz, S. Wide-area power oscillation damping with a fuzzy controller compensating the continuous communication delays. IEEE Trans. Power Syst. 2013, 28, 1997–2005. [Google Scholar] [CrossRef]
- Milano, F.; Ortega, Á.; Conejo, A.J. Model-agnostic linear estimation of generator rotor speeds based on phasor measurement units. IEEE Trans. Power Syst. 2018, 33, 7258–7268. [Google Scholar]
- Zhao, L.; Abur, A. Multi area state estimation using synchronized phasor measurements. IEEE Trans. Power Syst. 2005, 20, 611–617. [Google Scholar] [CrossRef]
- Zhu, L.; Lu, C.; Dong, Z.Y.; Hong, C. Imbalance learning machine-based power system short-term voltage stability assessment. IEEE Trans. Ind. Inform. 2017, 13, 2533–2543. [Google Scholar] [CrossRef]
- Yu, J.J.Q.; Lam, A.Y.S.; Hill, D.J.; Li, V.O.K. Delay aware intelligent transient stability assessment system. IEEE Access 2017, 5, 17230–17239. [Google Scholar] [CrossRef] [Green Version]
- Tian, Y.C.; Levy, D. Compensation for control packet dropout in networked control systems. Inf. Sci. 2008, 178, 1263–1278. [Google Scholar] [CrossRef] [Green Version]
- Roy, S.; Patel, A.; Kar, I.N. Analysis and design of a wide-area damping controller for inter-area oscillation with artificially induced time delay. IEEE Trans. Smart Grid 2019, 10, 3654–3663. [Google Scholar] [CrossRef]
- Zheng, Y.; Brudnak, M.J.; Jayakumar, P.; Stein, J.L.; Ersal, T. A predictor-based framework for delay compensation in networked closed-loop systems. IEEE/ASME Trans. Mechatron. 2018, 23, 2482–2493. [Google Scholar] [CrossRef]
- Wang, S.; Meng, X.; Chen, T. Wide-area control of power systems through delayed network communication. IEEE Trans. Power Syst. 2012, 20, 495–503. [Google Scholar]
- Naduvathuparambil, B.; Valenti, M.C.; Feliachi, A. Communication delays in wide area measurement systems. In Proceedings of the 34th Southeastern Symposium on System Theory, Huntsville, LA, USA, 19 March 2002; pp. 118–122. [Google Scholar]
- Ye, H.; Liu, Y.; Zhang, P. Efficient eigen-analysis for large delayed cyber-physical power system using explicit infinitesimal generator discretization. IEEE Trans. Power Syst. 2016, 31, 2361–2370. [Google Scholar] [CrossRef]
- Milano, F.; Anghel, M. Impact of time delays on power system stability. IEEE Trans. Circuits Syst. I Regul. Pap. 2012, 59, 889–900. [Google Scholar] [CrossRef]
- Stahlhut, J.W.; Browne, T.J.; Heydt, G.T. Latency viewed as a stochastic process and its impact on wide area power system control signals. IEEE Trans. Power Syst. 2008, 23, 84–91. [Google Scholar] [CrossRef]
- Yao, W.; Jiang, L.; Wu, Q.H.; Wen, J.Y.; Cheng, S.J. Delay-dependent stability analysis of the power system with a wide-area damping controller embedded. IEEE Trans. Power Syst. 2011, 26, 233–240. [Google Scholar] [CrossRef]
- Papachristodoulou, A.; Peet, M.M.; Niculescu, S. Stability analysis of linear system with time-varying delays: Delay uncertainty and quenching. In Proceedings of the 46th IEEE Conference on Decision and Control, New Orleans, LA, USA, 12–14 December 2007; pp. 2117–2118. [Google Scholar]
- Liu, M.; Ortega, Á.; Milano, F. PMU-based Estimation of the Frequency of the Center of Inertia and Generator Rotor Speeds. In Proceedings of the IEEE PES General Meeting, Atlanta, GA, USA, 4–8 August 2019; pp. 1–5. [Google Scholar]
- Lu, C.; Zhang, X.; Wang, X.; Han, Y. Mathematical expectation modeling of wide-area controlled power systems with stochastic time delay. IEEE Trans. Smart Grid 2015, 6, 1511–1519. [Google Scholar] [CrossRef]
- Liu, M.; Dassios, I.; Tzounas, G.; Milano, F. Stability analysis of power systems with inclusion of realistic-modeling wams delays. IEEE Trans. Power Syst. 2019, 34, 627–636. [Google Scholar] [CrossRef]
- Padhy, B.P.; Srivastava, S.C.; Verma, N.K. A wide-area damping controller considering network input and output delays and packet drop. IEEE Trans. Power Syst. 2017, 32, 166–176. [Google Scholar] [CrossRef]
- Ghosh, S.; Folly, K.A.; Patel, A. Synchronized versus non-synchronized feedback for speed-based wide-area pss: Effect of time-delay. IEEE Trans. Smart Grid 2018, 9, 3976–3985. [Google Scholar] [CrossRef]
- Yao, W.; Jiang, L.; Wen, J.; Wu, Q.; Cheng, S. Wide-area damping controller for power system interarea oscillations: A networked predictive control approach. IEEE Trans. Control Syst. Technol. 2015, 23, 27–36. [Google Scholar] [CrossRef]
- Zhao, Y.; Liu, G.; Rees, D. Networked predictive control systems based on the hammerstein model. IEEE Trans. Circuits Syst. II Express Briefs 2008, 55, 469–473. [Google Scholar] [CrossRef]
- Yu, X.; Jiang, J. Analysis and compensation of delays in ff h1 fieldbus control loop using model predictive control. IEEE Trans. Instrum. Meas. 2014, 63, 2432–2446. [Google Scholar] [CrossRef]
- Chaudhuri, N.R.; Ray, S.; Majumder, R.; Chaudhuri, B. A new approach to continuous latency compensation with adaptive phasor power oscillation damping controller (pod). IEEE Trans. Power Syst. 2010, 25, 939–946. [Google Scholar] [CrossRef]
- Sarkar, T.K.; Ji, Z.; Kim, K.; Medouri, A.; Salazar-Palma, M. A survey of various propagation models for mobile communication. IEEE Antennas Propag. Mag. 2003, 45, 51–82. [Google Scholar] [CrossRef] [Green Version]
- Huang, Z.; Schneider, K.; Nieplocha, J. Feasibility studies of applying kalman filter techniques to power system dynamic state estimation. In Proceedings of the 2007 International Power Engineering Conference (IPEC 2007), Singapore, 3–6 December 2007; pp. 376–382. [Google Scholar]
- Zhou, N.; Meng, D.; Lu, S. Estimation of the dynamic states of synchronous machines using an extended particle filter. IEEE Trans. Power Syst. 2013, 28, 4152–4161. [Google Scholar] [CrossRef]
- Zhao, J. Dynamic state estimation with model uncertainties using h∞ extended kalman filter. IEEE Trans. Power Syst. 2018, 33, 1099–1100. [Google Scholar] [CrossRef]
- Liu, Y.; Liu, Y.; Zhang, Y.; Guo, J.; Zhou, D. Wide Area Monitoring through Synchrophasor Measurement. In Smart Grid Handbook; Liu, C., McArthur, S., Lee, S., Eds.; Wiley: Hoboken, NJ, USA, 2016; pp. 1–18. [Google Scholar]
- Michiels, W.; Niculescu, S.I. Time-delay systems of neutral type. In Stability and Stabilization of Time-Delay Systems: An Eigenvalue-based Approach; Society for Industrial and Applied Mathematics: Philadelphia, PA, USA, 2007; pp. 15–31. [Google Scholar]
- Milano, F.; Dassios, I. Small-Signal Stability Analysis for Non-Index 1 Hessenberg Form Systems of Delay Differential-Algebraic Equations. IEEE Trans. Circuits Syst. I Regul. Pap. 2016, 63, 1521–1530. [Google Scholar] [CrossRef]
- Liu, M.; Dassios, I.; Milano, F. On the stability analysis of systems of neutral delay differential equations. Circuits Syst. Signal Process. 2019, 38, 1639–1653. [Google Scholar] [CrossRef] [Green Version]
- Liu, M.; Tzounas, G.; Milano, F. A model-independent delay compensation method for power systems. In Proceedings of the Milan PowerTech, Milano, Italy, 23–27 June 2019; pp. 1–6. [Google Scholar]
- Milano, F. A Python-based software tool for power system analysis. In Proceedings of the IEEE PES General Meeting, Vancouver, BC, Canada, 21–25 July 2013; pp. 1–5. [Google Scholar]
- Milano, F. Power System Modeling and Scripting; Springer: London, UK, 2010. [Google Scholar]
- Milano, F.; Ortega, Á. Converter-Interfaced Energy Storage Systems: Context, Modelling and Dynamic Analysis; Cambridge University Press: Cambridge, UK, 2019. [Google Scholar]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Compensation Gain | PD | Predictor-Based |
|---|---|---|
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, M.; Dassios, I.; Tzounas, G.; Milano, F. Model-Independent Derivative Control Delay Compensation Methods for Power Systems. Energies 2020, 13, 342. https://doi.org/10.3390/en13020342
Liu M, Dassios I, Tzounas G, Milano F. Model-Independent Derivative Control Delay Compensation Methods for Power Systems. Energies. 2020; 13(2):342. https://doi.org/10.3390/en13020342
Chicago/Turabian StyleLiu, Muyang, Ioannis Dassios, Georgios Tzounas, and Federico Milano. 2020. "Model-Independent Derivative Control Delay Compensation Methods for Power Systems" Energies 13, no. 2: 342. https://doi.org/10.3390/en13020342
APA StyleLiu, M., Dassios, I., Tzounas, G., & Milano, F. (2020). Model-Independent Derivative Control Delay Compensation Methods for Power Systems. Energies, 13(2), 342. https://doi.org/10.3390/en13020342