Fault-Tolerant Control of Coil Inter-Turn Short-Circuit in Five-Phase Permanent Magnet Synchronous Motor

Abstract
:1. Introduction
2. The Structure of Five-Phase PMSM
3. The Mathematical Model of Five-Phase PMSM
4. Analysis of Torque Ripple in the ITSC Fault
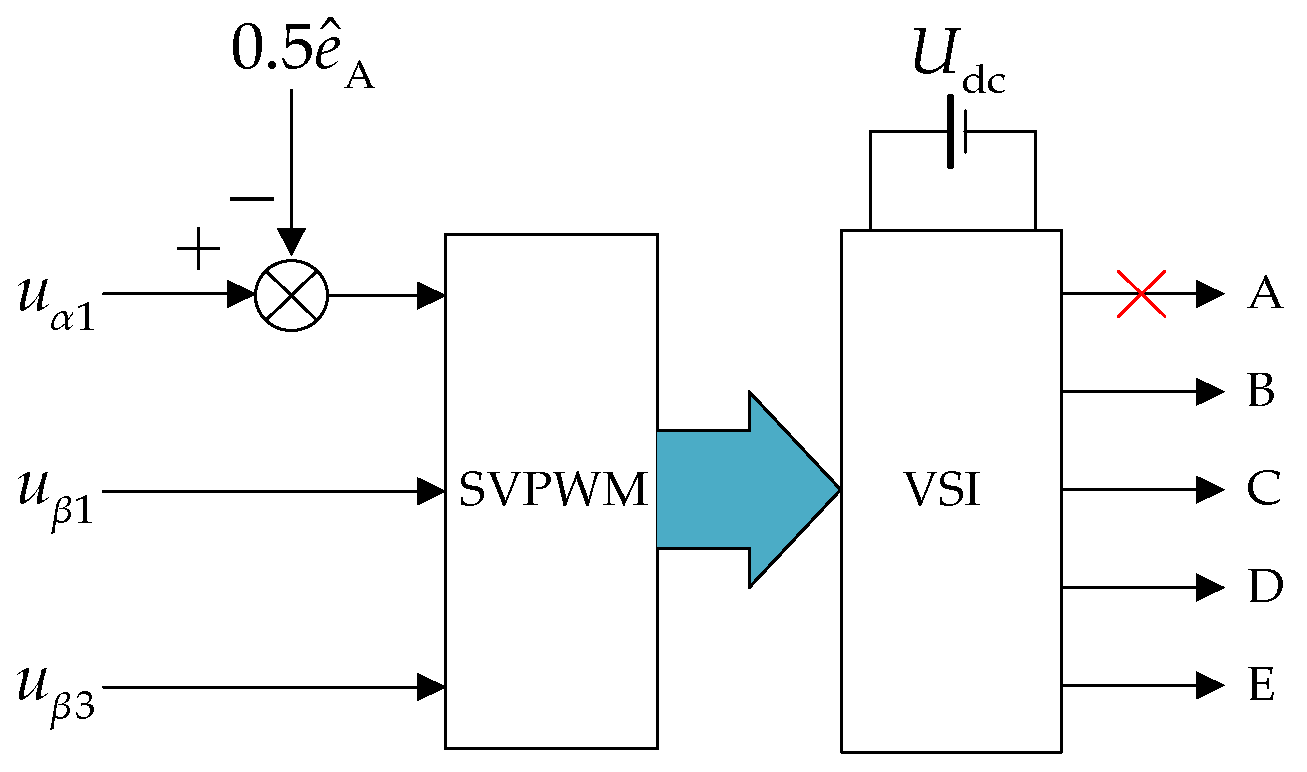
5. Control Strategy of Five-Phase PMSM under Open Circuit Condition
6. Fault-Tolerant Control Strategy under ITSC Fault
6.1. The Principle of Torque Ripple Suppression
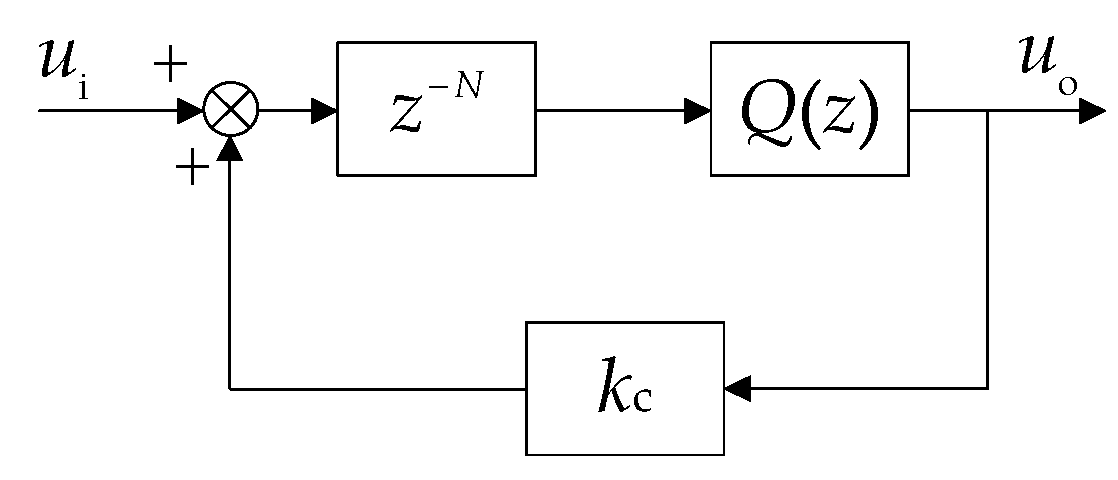
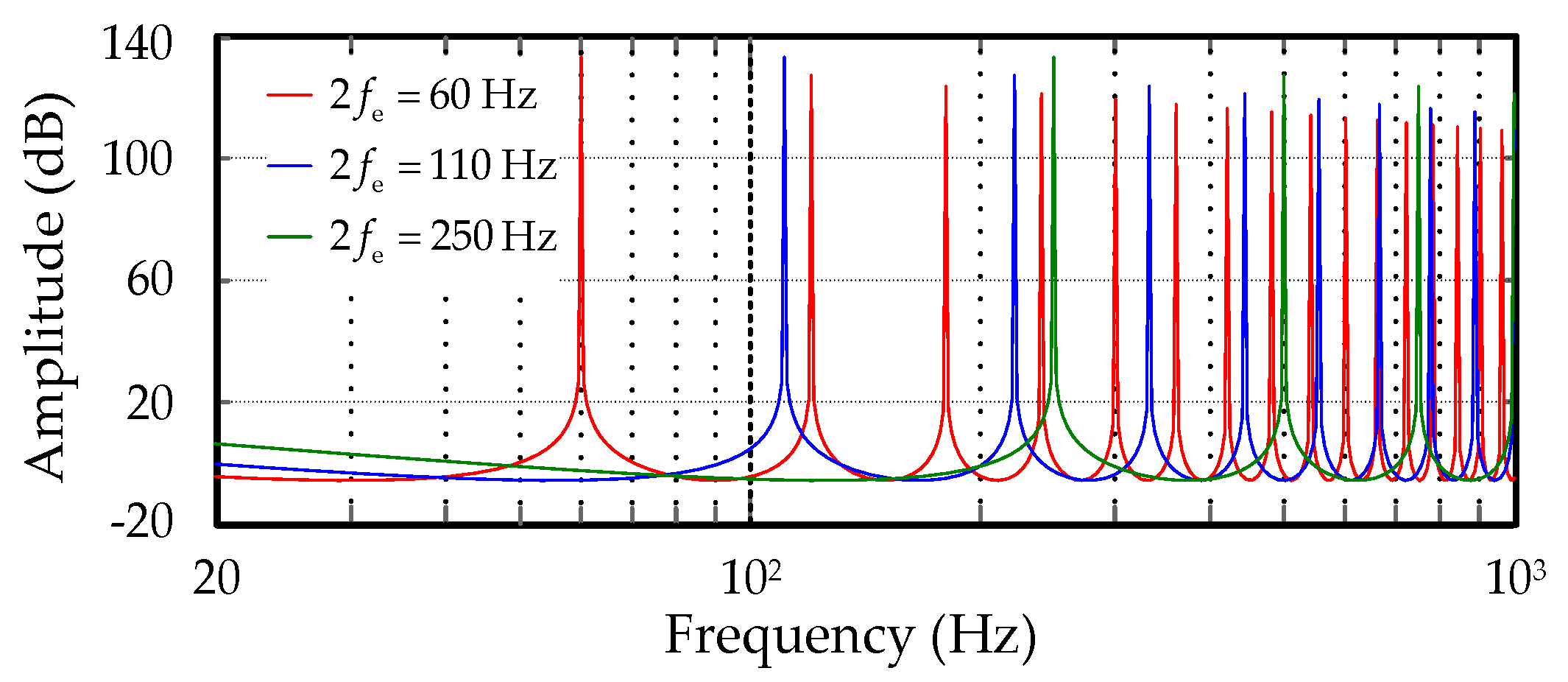
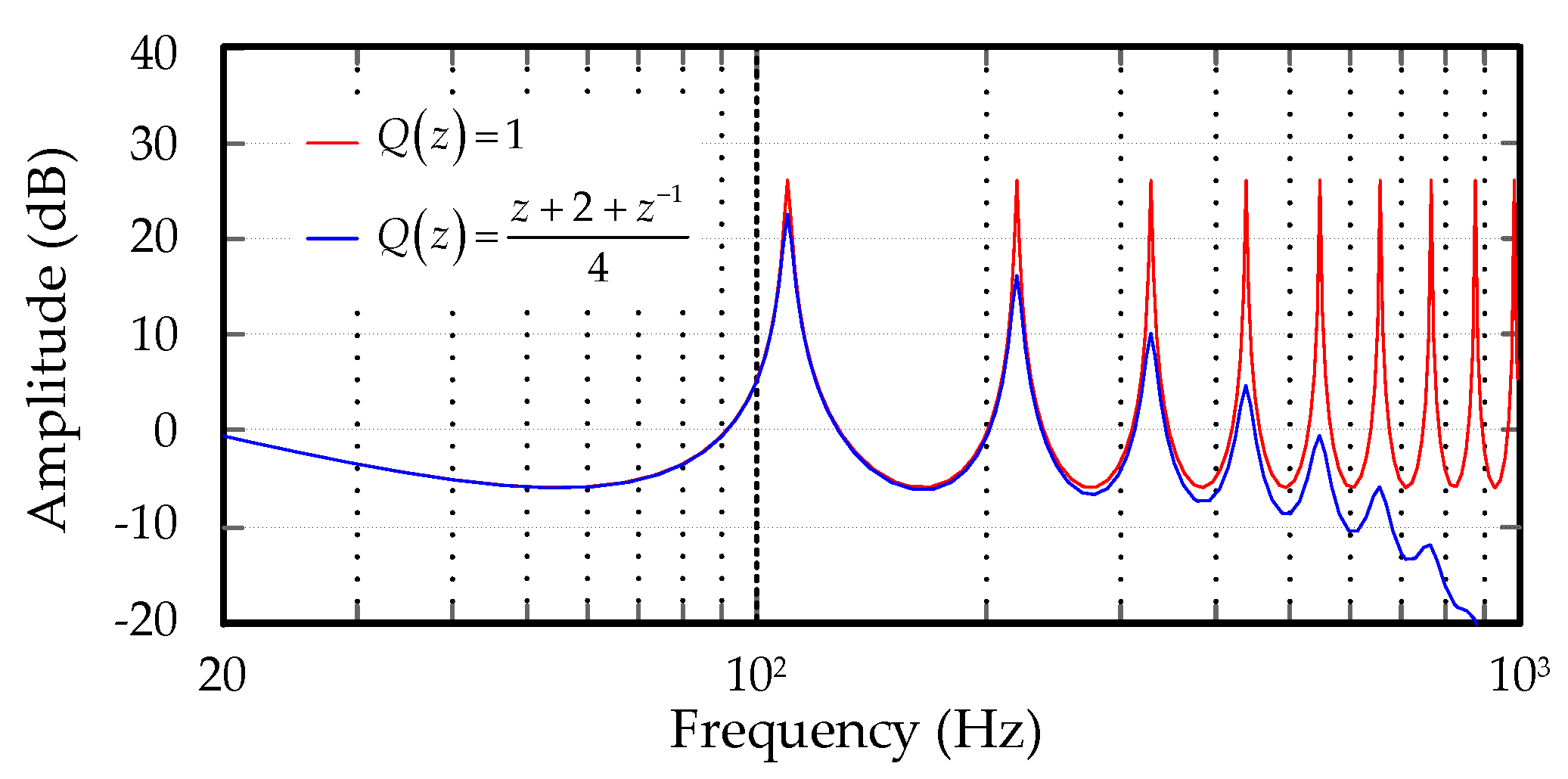
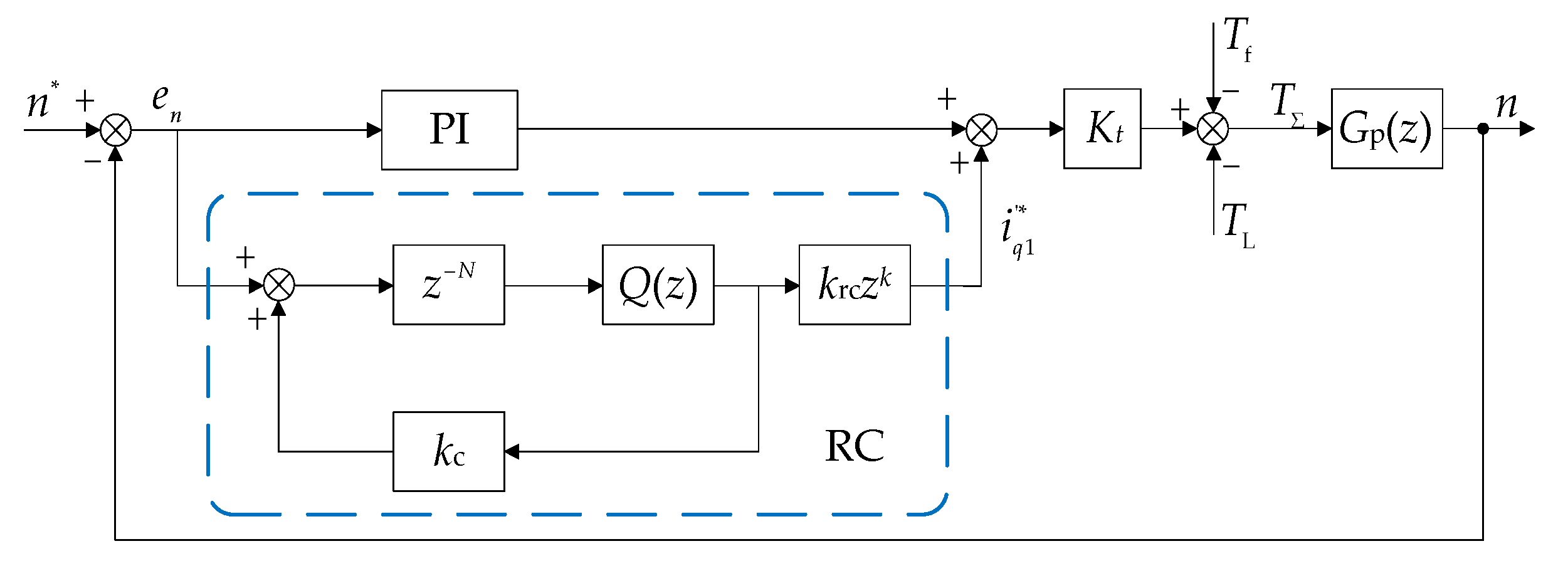
6.2. The Design of Repetitive Controller
7. Simulation Analysis
8. Experimental Analysis
9. Conclusions
- (1)
- After an ITSC fault occurs in the five-phase PMSM, a short-circuit current will appear in the short-circuit coil. Through analysis, the output torque of the motor produces the ripple components at this time. In order to prevent the short-circuit fault from spreading, the power supply to the faulty phase is stopped, and the motor control system turns into open circuit mode. Due to the existence of the third order permanent magnet link, the torque of the healthy four-phase will also contain ripple components. These even-order ripple components make the motor performance worse.
- (2)
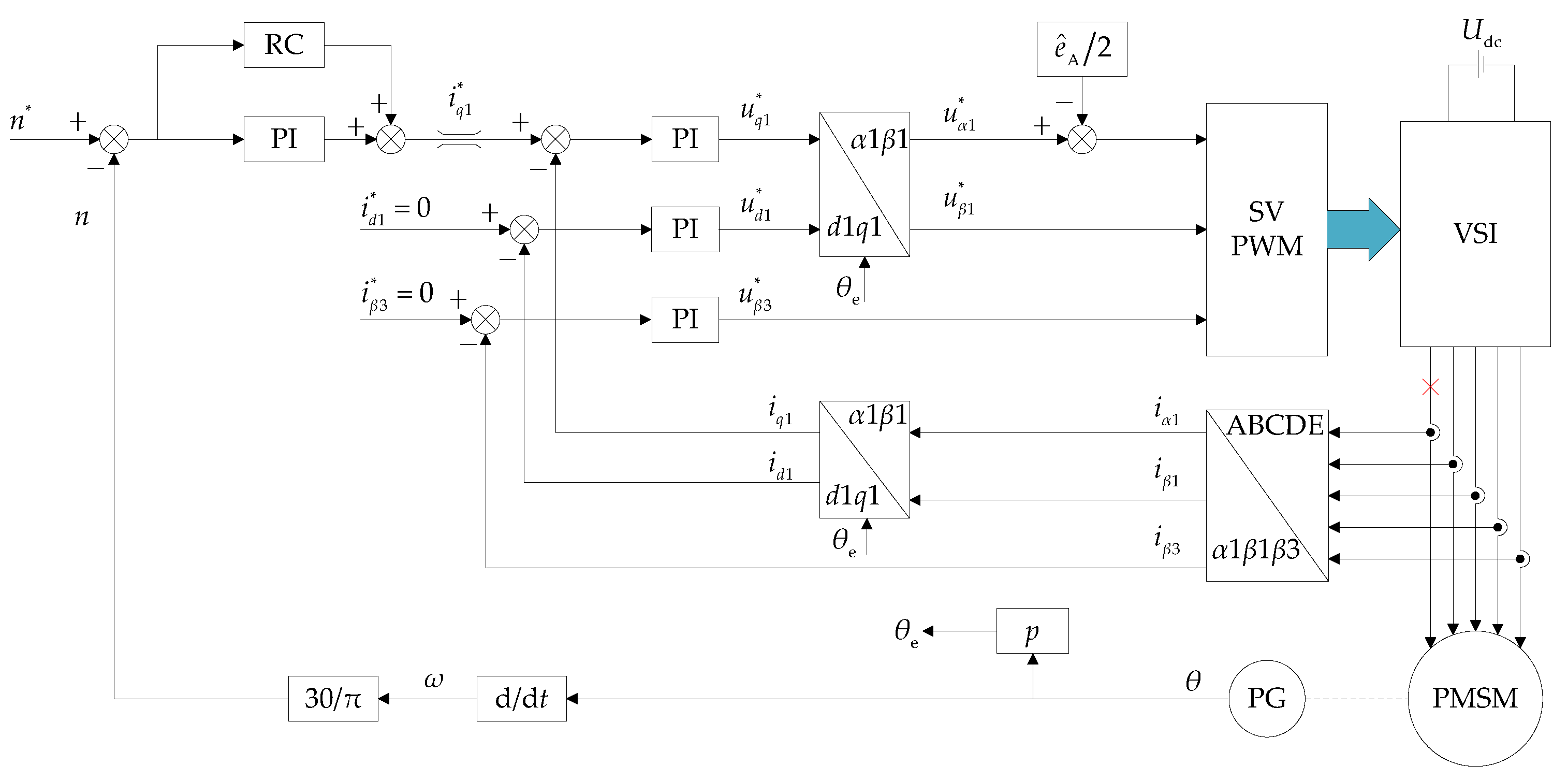
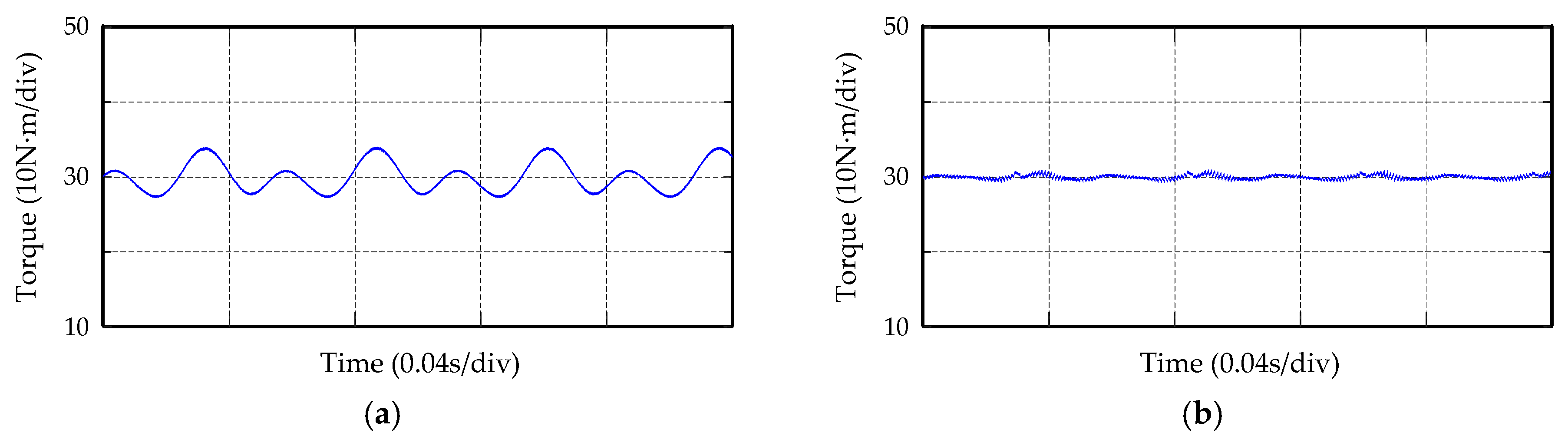
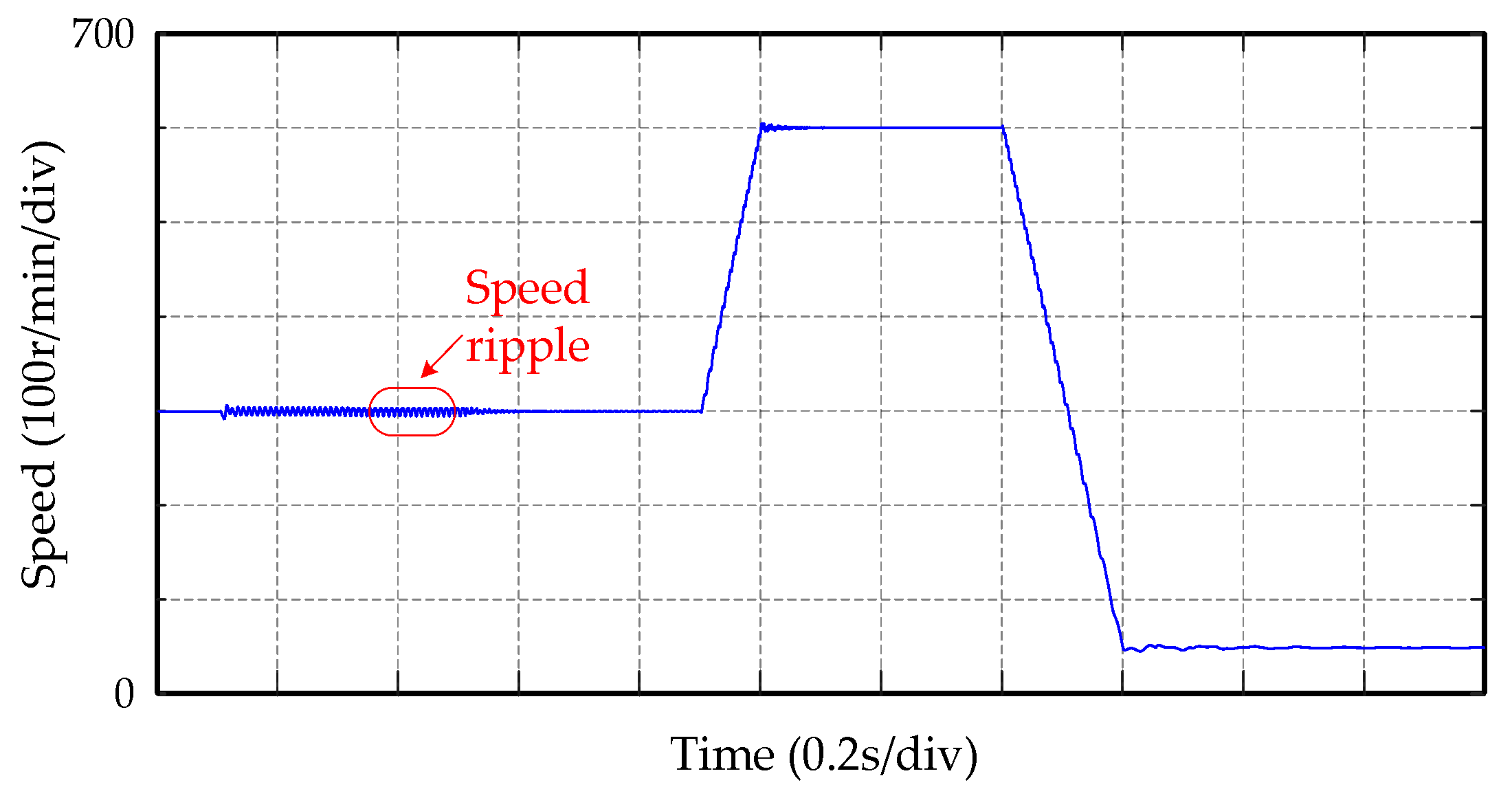
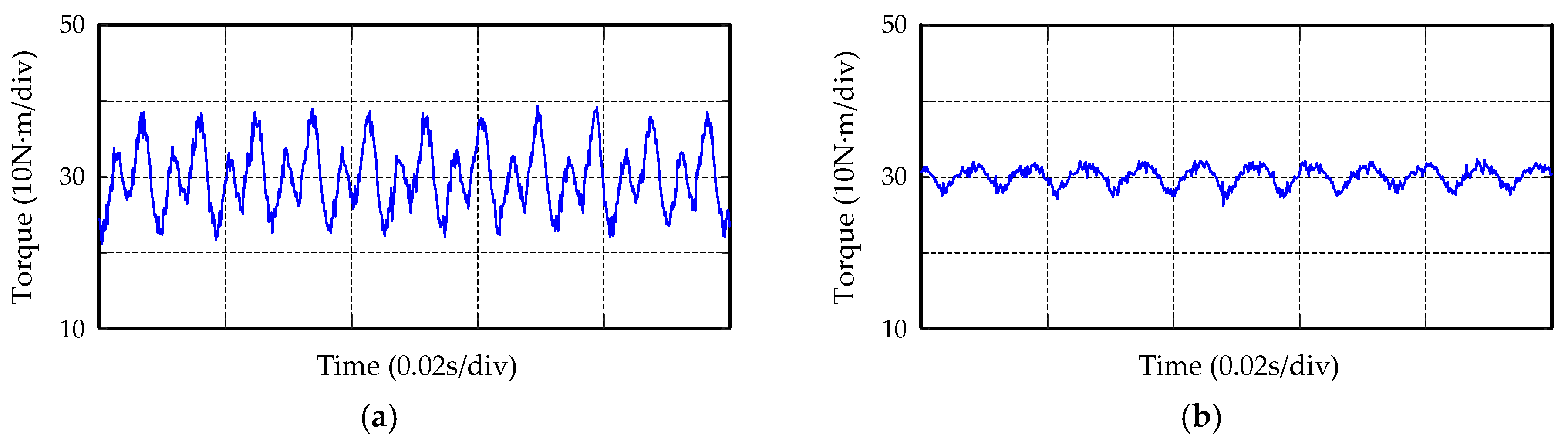
- Torque ripples will cause speed ripples. This paper uses RC to perform proportional gain compensation for speed ripple to suppress torque ripple. The design process of the RC is introduced. By connecting RC in parallel with PI controller in the speed loop, the effect of torque ripple suppression can be achieved.
- (3)
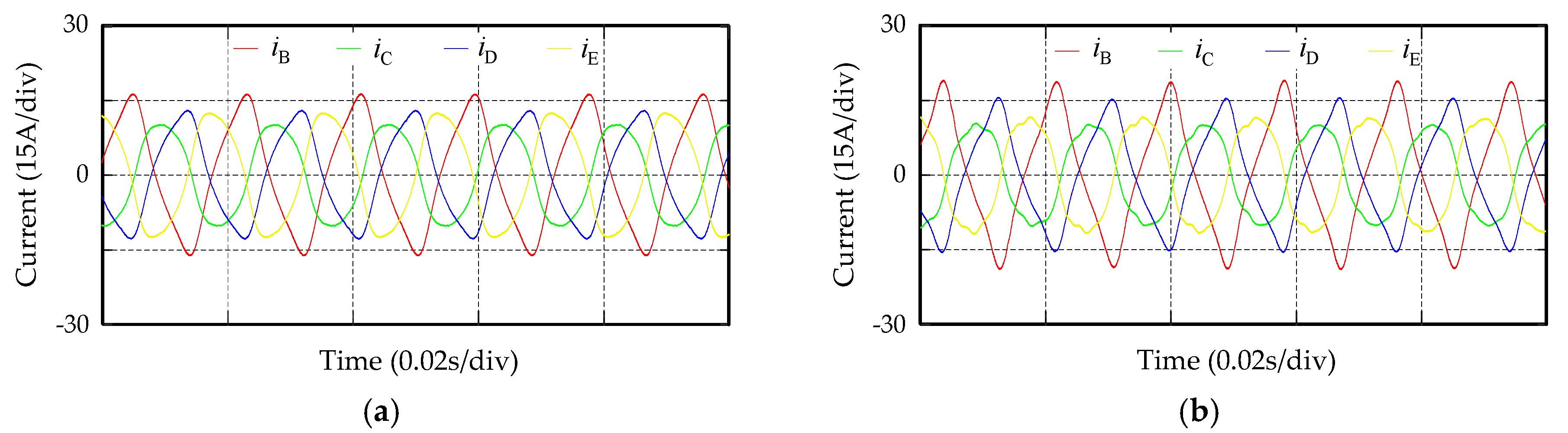
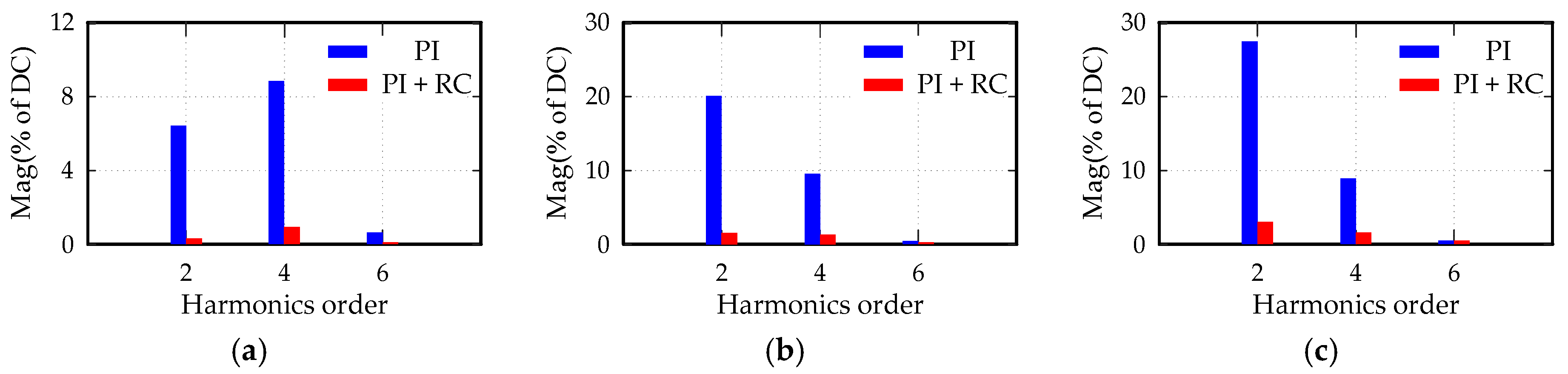
- The discrete model of the motor control system is established in the paper. By changing the delay part in the RC, the resonant frequency of the RC is changed, thereby suppressing the torque ripple at different speeds. Simulation and experimental results show that the proposed fault-tolerant control strategy can effectively suppress torque ripple.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Mohammadpour, A.; Sadeghi, S.; Parsa, L. A generalized fault-tolerant control strategy for five-phase PM motor drives considering star, pentagon and pentacle connection of stator windings. IEEE Trans. Ind. Electron. 2014, 61, 63–75. [Google Scholar] [CrossRef]
- Duran, M.J.; Barrero, F. Recent advances in the design, modeling, and control of multiphase machines-part II. IEEE Trans. Ind. Electron. 2016, 63, 459–468. [Google Scholar] [CrossRef]
- Patel, V.I.; Wang, J.B.; Nugraha, D.T.; Vuletic, R.; Tousen, J. Enhanced availability of drivetrain through novel multiphase permanent-magnet machine drive. IEEE Trans. Ind. Electron. 2016, 63, 469–480. [Google Scholar] [CrossRef]
- Guo, H.; Xu, J.Q.; Chen, Y.H. Robust control of fault-tolerant permanent magnet synchronous motor for aerospace application with guaranteed fault switch process. IEEE Trans. Ind. Electron. 2015, 62, 7309–7321. [Google Scholar] [CrossRef]
- Xue, S.; Wen, X.H.; Wang, Y.L. Multi-dimensional control in multiphase permanent motor drives. Trans. China Electrotech. Soc. 2008, 23, 65–69. [Google Scholar] [CrossRef]
- Ryu, H.M.; Kim, J.H.; Sul, S.K. Analysis of multiphase space vector pulse-width modulation based on multiple d-q spaces concept. IEEE Trans. Power Electron. 2005, 20, 1364–1371. [Google Scholar] [CrossRef]
- Xu, L.; Zhao, W.X.; Liu, G.H. Improved SVPWM fault-tolerant control strategy for five-phase permanent-magnet motor. Energies 2019, 12, 4626. [Google Scholar] [CrossRef] [Green Version]
- Sun, G.D.; Yang, G.J.; Wang, Y.Y.; Su, J.Y. Unified fault-tolerant control strategy with torque ripple compensation for five-phase permanent magnet synchronous motor based on normal decoupling. Energies 2019, 12, 1127. [Google Scholar] [CrossRef] [Green Version]
- Dwari, S.; Parsa, L. Fault-tolerant control of five-phase permanent-magnet motors with trapezoidal back EMF. IEEE Trans. Ind. Electron. 2011, 58, 476–485. [Google Scholar] [CrossRef]
- Wu, F.; Tong, C.D.; Sui, Y.; Cheng, L.M.; Zheng, P. Influence of third harmonic back EMF on modeling and remediation of winding short circuit in a multiphase PM machine with FSCWs. IEEE Trans. Ind. Electron. 2016, 63, 6031–6041. [Google Scholar] [CrossRef]
- Jiang, X.F.; Huang, W.X.; Cao, R.W.; Hao, Z.Y.; Jiang, W. Electric drive system of dual-winding fault-tolerant permanent-magnet motor for aerospace applications. IEEE Trans. Ind. Electron. 2015, 62, 7322–7330. [Google Scholar] [CrossRef]
- Chen, Y.G.; Liu, B. Design and analysis of a five-phase fault-tolerant permanent magnet synchronous motor for aerospace starter-generator system. IEEE Access. 2019, 7, 135040–135049. [Google Scholar] [CrossRef]
- Sen, B.; Wang, J. A fast detection technique for stator inter-turn fault in multi-phase permanent magnet machines using model based approach. In Proceedings of the 7th IET International Conference on Power Electronics, Machines and Drives (PEMD 2014), Manchester, UK, 8–10 April 2014; pp. 1–6. [Google Scholar] [CrossRef]
- Sui, Y.; Yin, Z.S.; Cheng, L.M.; Liu, J.Q.; Zheng, P.; Tang, D.J. Short-circuit fault detection for a five-phase 30-slot/32-pole permanent-magnet synchronous machine. In Proceedings of the 21st International Conference on Electrical Machines and Systems (ICEMS 2018), Jeju, Korea, 7–10 October 2018; pp. 50–54. [Google Scholar] [CrossRef]
- Cui, R.H.; Fan, Y.; Li, C.X. On-line inter-turn short-circuit fault diagnosis and torque ripple minimization control strategy based on OW five-phase BFTHE-IPM. IEEE Trans. Energy Convers. 2018, 33, 2200–2209. [Google Scholar] [CrossRef]
- Zhou, H.W.; Liu, G.H.; Zhao, W.X.; Yu, X.D.; Gao, M.H. Dynamic performance improvement of five-phase permanent-magnet motor with short-circuit fault. IEEE Trans. Ind. Electron. 2018, 65, 145–155. [Google Scholar] [CrossRef]
- Fan, Y.; Cui, R.H.; Zhang, A. Torque ripple minimization for inter-turn short-circuit fault based on open-winding five phase FTFSCW-IPM motor for electric vehicle application. IEEE Trans. Veh. Technol. 2020, 69, 282–292. [Google Scholar] [CrossRef]
- Chen, Y.G.; Zhang, B. Minimization of the electromagnetic torque ripple caused by the coils inter-turn short circuit fault in dual-redundancy permanent magnet synchronous motors. Energies 2017, 10, 1789. [Google Scholar] [CrossRef] [Green Version]
- Jeong, I.; Hyon, B.J.; Nam, K. Dynamic modeling and control for SPMSMs with internal turn short fault. IEEE Trans. Power Electron. 2013, 28, 3495–3508. [Google Scholar] [CrossRef]
- Baudart, F.; Dehez, B.; Matagne, E.; Telteu-Nedelcu, D.; Alexandre, P.; Labrique, F. Torque control strategy of polyphase permanent-magnet synchronous machines with minimal controller reconfiguration under open circuit fault of one phase. IEEE Trans. Ind. Electron. 2012, 59, 2632–2644. [Google Scholar] [CrossRef]
- Guzman, H.; Duran, M.J.; Barrero, F.; Bogado, B.; Toral, S. Speed control of five-phase induction motors with integrated open-phase fault operation using model-based predictive current control techniques. IEEE Trans. Ind. Electron. 2014, 61, 4474–4484. [Google Scholar] [CrossRef]
- Ullah, Z.; Hur, J. Analysis of inter-turn-short fault in an FSCW IPM type brushless motor considering effect of control drive. IEEE Trans. Ind. Appl. 2020, 56, 1356–1367. [Google Scholar] [CrossRef]
- Tian, B.; An, Q.T.; Duan, J.D.; Sun, D.Y.; Sun, L.; Semenov, D. Decoupled modeling and nonlinear speed control for five-phase PM motor under single-phase open fault. IEEE Trans. Power Electron. 2017, 32, 5473–5486. [Google Scholar] [CrossRef]
- Tian, B.; Mirzaeva, G.; An, Q.T.; Sun, L.; Semenov, D. Fault-tolerant control of a five-phase permanent magnet synchronous motor for industry applications. IEEE Trans. Ind. Appl. 2018, 54, 3943–3952. [Google Scholar] [CrossRef]
- Xiong, C.; Xu, H.P.; Zhou, P.; Guan, T. Fault-tolerant field oriented control for five-phase permanent-magnet motors under single phase open fault. Proc. Chin. Soc. Elect. Eng. 2019, 39, 7055–7064. [Google Scholar] [CrossRef]
- Chen, Y.G.; Bao, Z.M.; Lin, C.H.; Zhao, X.B. Fault-tolerant SVPWM control strategy for five-phase PMSM under single-phase open-circuit fault. In Proceedings of the 10th International Conference on Applied Energy (ICAE2018), Hong Kong, China, 22–25 August 2018; pp. 2605–2610. [Google Scholar] [CrossRef]
- Song, J.C.; Wang, X.; Lin, L.Y.; Gao, Y.G.; Lu, S.X.; Sun, T. Study of fast repetitive control strategy based on transformerless hybrid active power filter. High Voltage Eng. 2019, 45, 2037–2045. [Google Scholar] [CrossRef]
- Schulting, P.; van der Broeck, C.H.; Doncker, R. Analysis and design of repetitive controllers for applications in distorted distribution grids. IEEE Trans. Power Electron. 2019, 34, 996–1004. [Google Scholar] [CrossRef]
- Herran, M.A.; Fischer, J.R.; Gonzalez, S.A.; Judewicz, M.G.; Carugati, I.; Carrica, D.O. Repetitive control with adaptive sampling frequency for wind power generation systems. IEEE J. Emerg. Sel. Top. Power Electron. 2014, 2, 58–69. [Google Scholar] [CrossRef]
- Bing, Y.Q.; Jiang, D.Z.; Liang, Y.Q.; Jiang, C.X.; He, T.X.; Yang, L.; Hu, P.F. Modified modeling and system stabilization of shunt active power filter compensating loads with µf capacitance. Energies 2019, 12, 2084. [Google Scholar] [CrossRef] [Green Version]
- Cui, P.; Wang, Q.R.; Zhang, G.X.; Gao, Q. Hybrid fractional repetitive control for magnetically suspended rotor systems. IEEE Trans. Ind. Electron. 2018, 65, 3491–3498. [Google Scholar] [CrossRef]
- Wu, Y.L.; Li, H.; Song, X.D.; Chen, B.D. Suppression of harmonic current in permanent magnet synchronous motors using improved repetitive controller. Trans. China Electrotech. Soc. 2019, 34, 2277–2286. [Google Scholar] [CrossRef]
- Kolluri, S.; Gorla, N.B.Y.; Sapkota, R.; Panda, S.K. A new control architecture with spatial comb filter and spatial repetitive controller for circulating current harmonics elimination in a droop-regulated modular multilevel converter for wind farm application. IEEE Trans. Power Electron. 2019, 34, 10509–10523. [Google Scholar] [CrossRef]
























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Symbol | Unit | Value |
|---|---|---|---|
| Rated power | kW | 6.3 | |
| Rated speed | r/min | 600 | |
| Rated current | A | 22 | |
| Stator resistance | Ω | 0.1638 | |
| Stator inductance | mH | 3.5 | |
| Number of pole pairs | – | 11 | |
| 1st PM flux linkage | Wb | 0.121 | |
| 3rd PM flux linkage | Wb | 0.0051 |
| Speed | Controller | 2nd | 4th | 6th | THD |
|---|---|---|---|---|---|
| 50 r/min | PI | 6.41% | 8.84% | 0.61% | 10.95% |
| PI + RC | 0.31% | 0.92% | 0.10% | 1.29% | |
| 300 r/min | PI | 20.14% | 9.60% | 0.33% | 22.37% |
| PI + RC | 1.21% | 1.10% | 0.19% | 2.36% | |
| PI + RC | 3.37% | 1.39% | 0.29% | 4.29% |
| Controller | 2nd | 4th | 6th | THD |
|---|---|---|---|---|
| PI | 12.62% | 17.96% | 0.45% | 22.40% |
| PI + RC | 4.67% | 1.08% | 0.21% | 5.19% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, D.; Chen, Y. Fault-Tolerant Control of Coil Inter-Turn Short-Circuit in Five-Phase Permanent Magnet Synchronous Motor. Energies 2020, 13, 5669. https://doi.org/10.3390/en13215669
Wang D, Chen Y. Fault-Tolerant Control of Coil Inter-Turn Short-Circuit in Five-Phase Permanent Magnet Synchronous Motor. Energies. 2020; 13(21):5669. https://doi.org/10.3390/en13215669
Chicago/Turabian StyleWang, Dingyu, and Yiguang Chen. 2020. "Fault-Tolerant Control of Coil Inter-Turn Short-Circuit in Five-Phase Permanent Magnet Synchronous Motor" Energies 13, no. 21: 5669. https://doi.org/10.3390/en13215669
APA StyleWang, D., & Chen, Y. (2020). Fault-Tolerant Control of Coil Inter-Turn Short-Circuit in Five-Phase Permanent Magnet Synchronous Motor. Energies, 13(21), 5669. https://doi.org/10.3390/en13215669