Hydrodynamic Performance of a Hybrid System Combining a Fixed Breakwater and a Wave Energy Converter: An Experimental Study

Abstract
:1. Introduction
2. Experimental Investigation
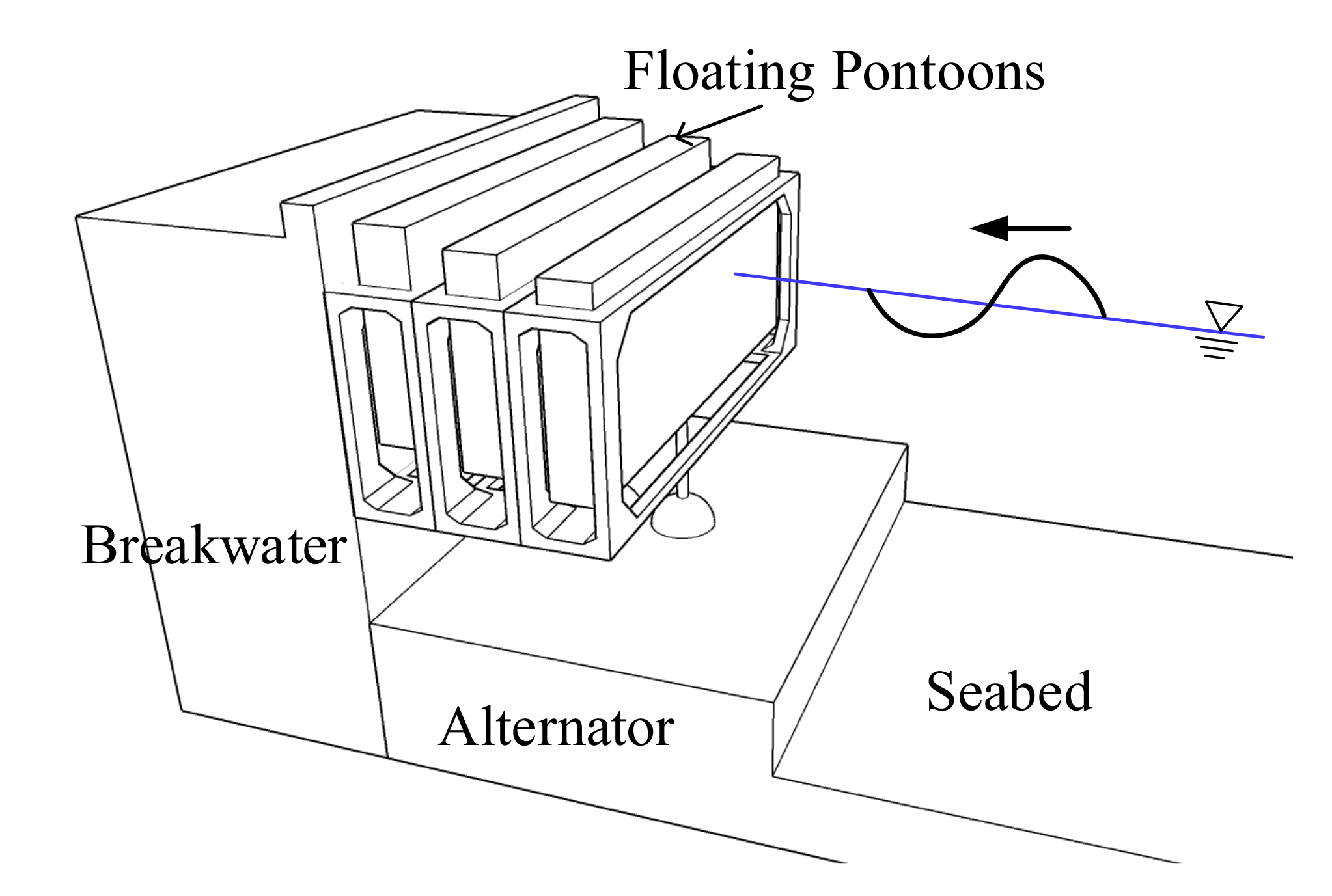
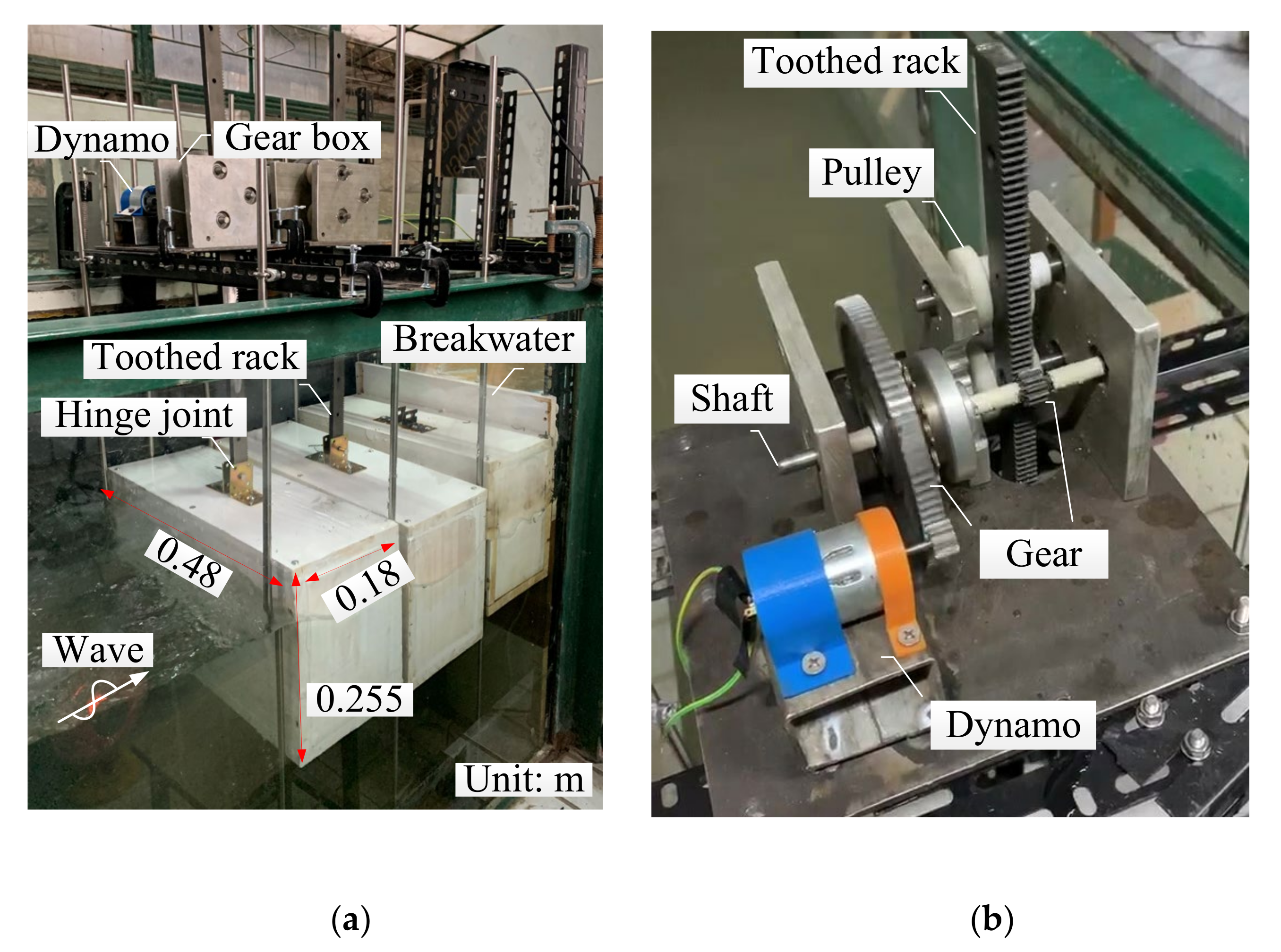
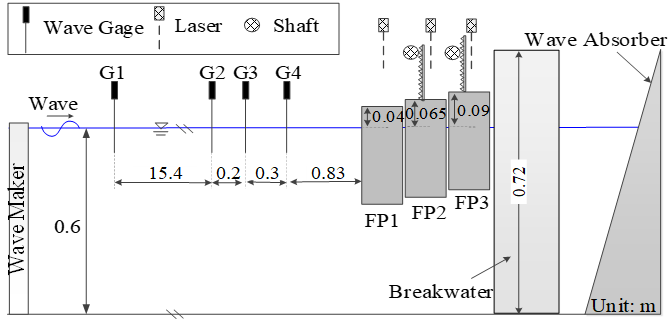
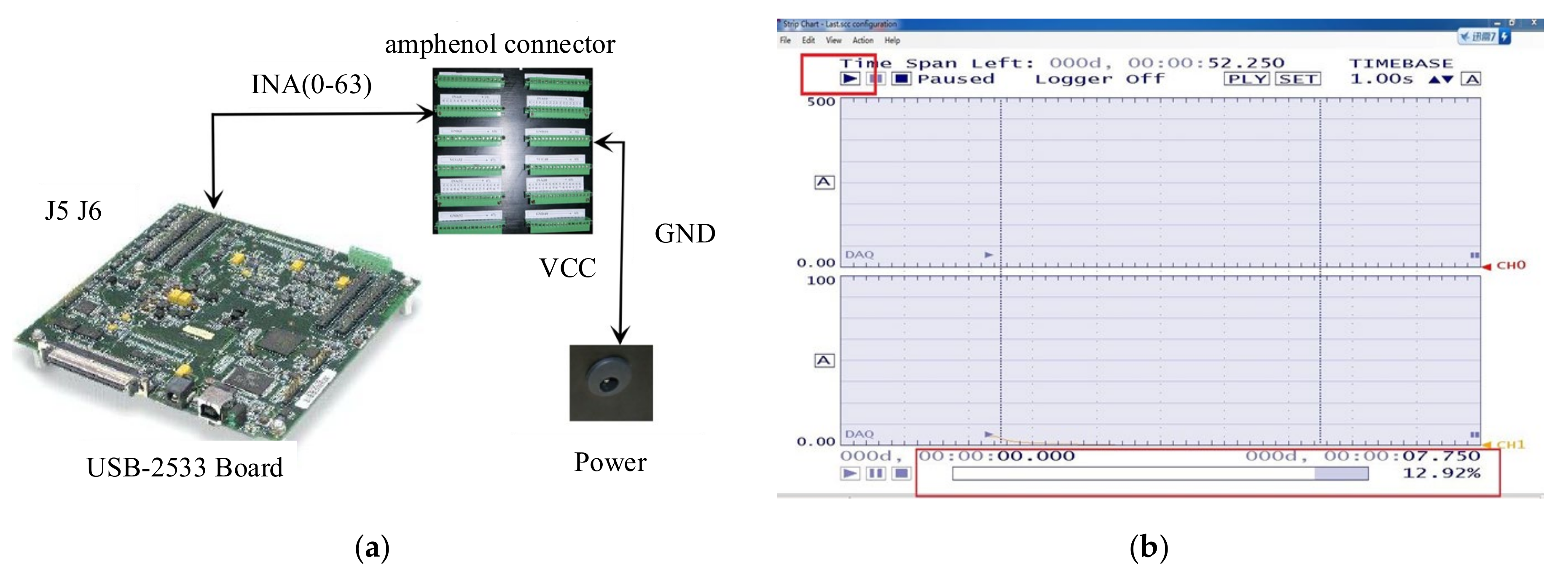
2.1. Experimental Setup
2.2. Data Analysis
3. Results and Discussion
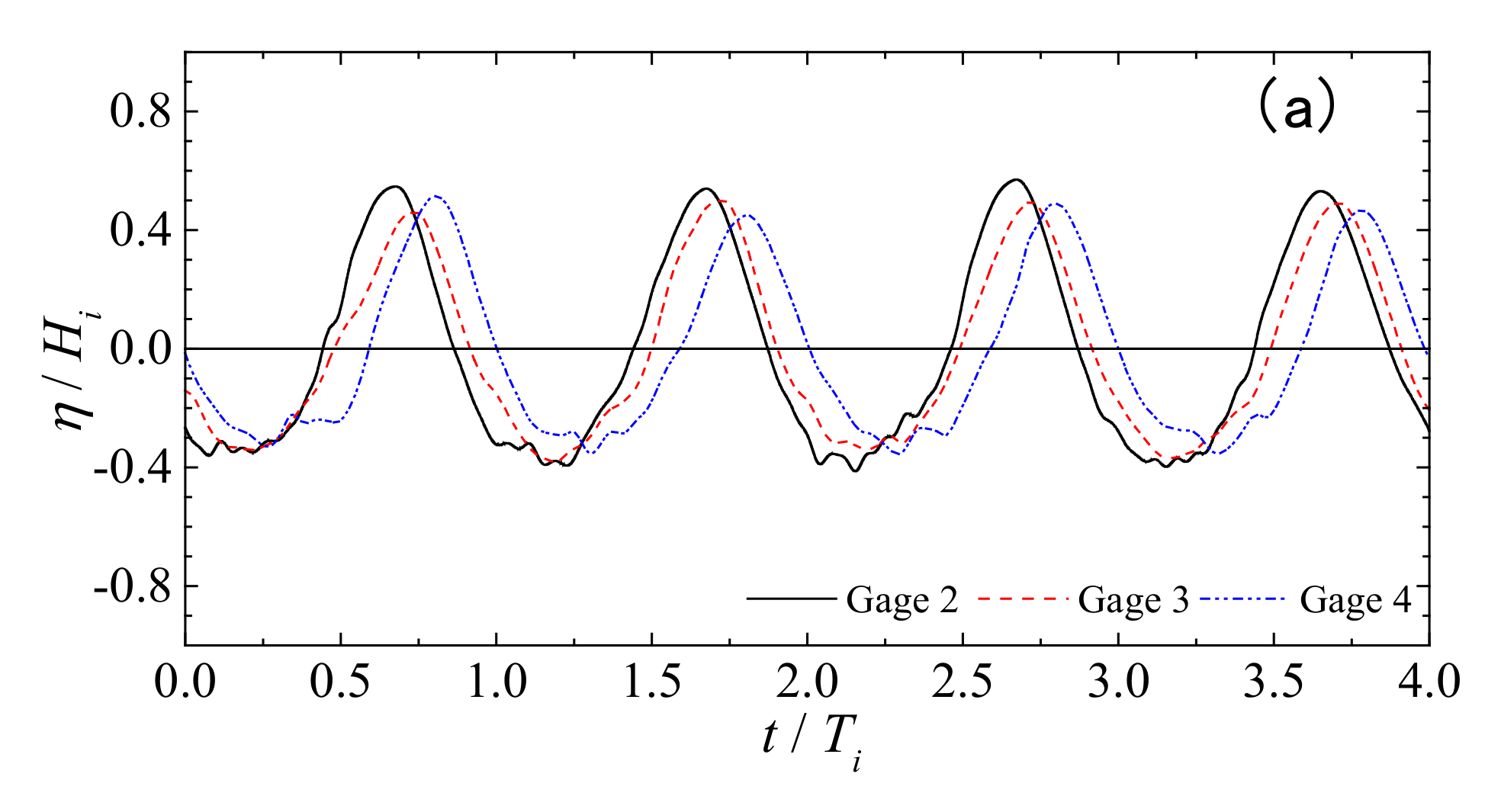
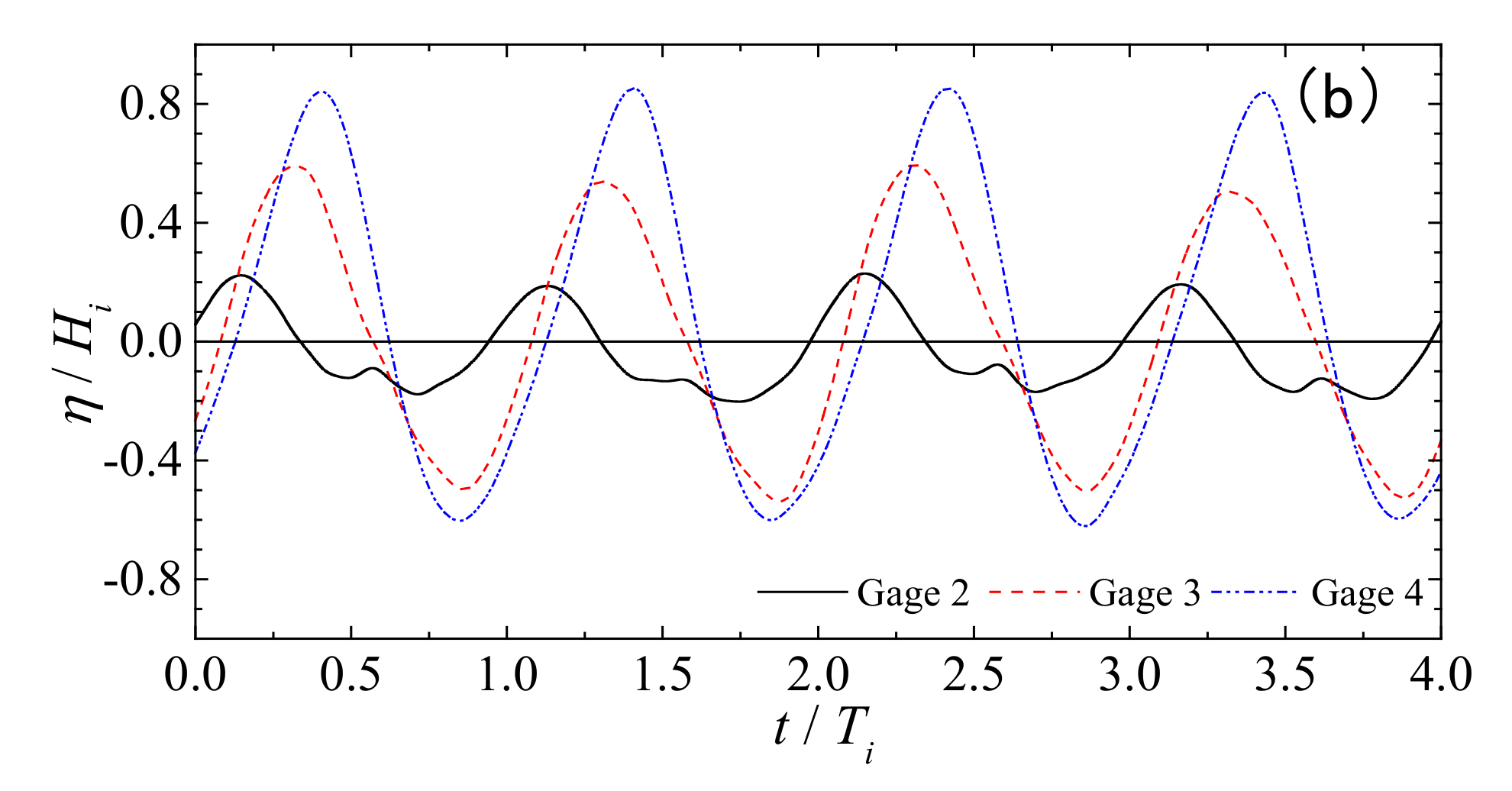
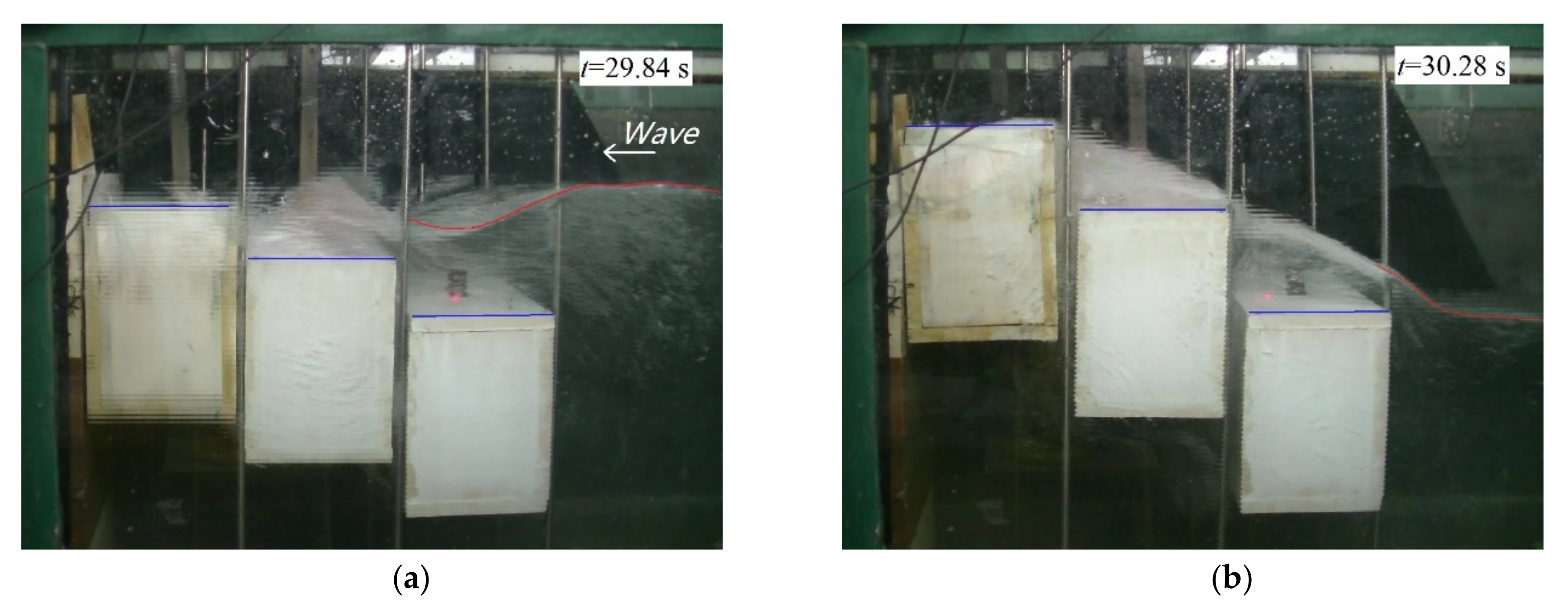
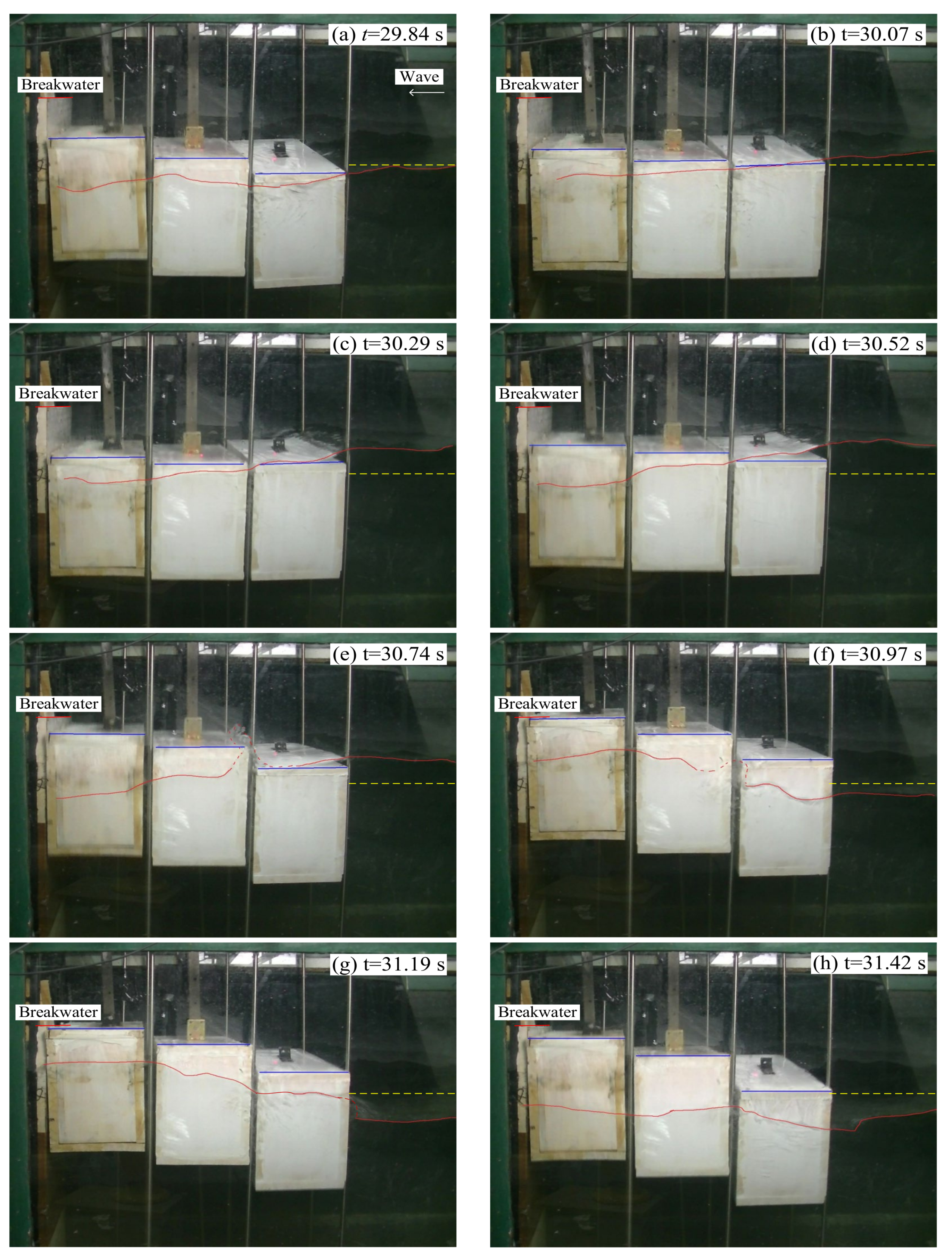
3.1. Free Water Surface
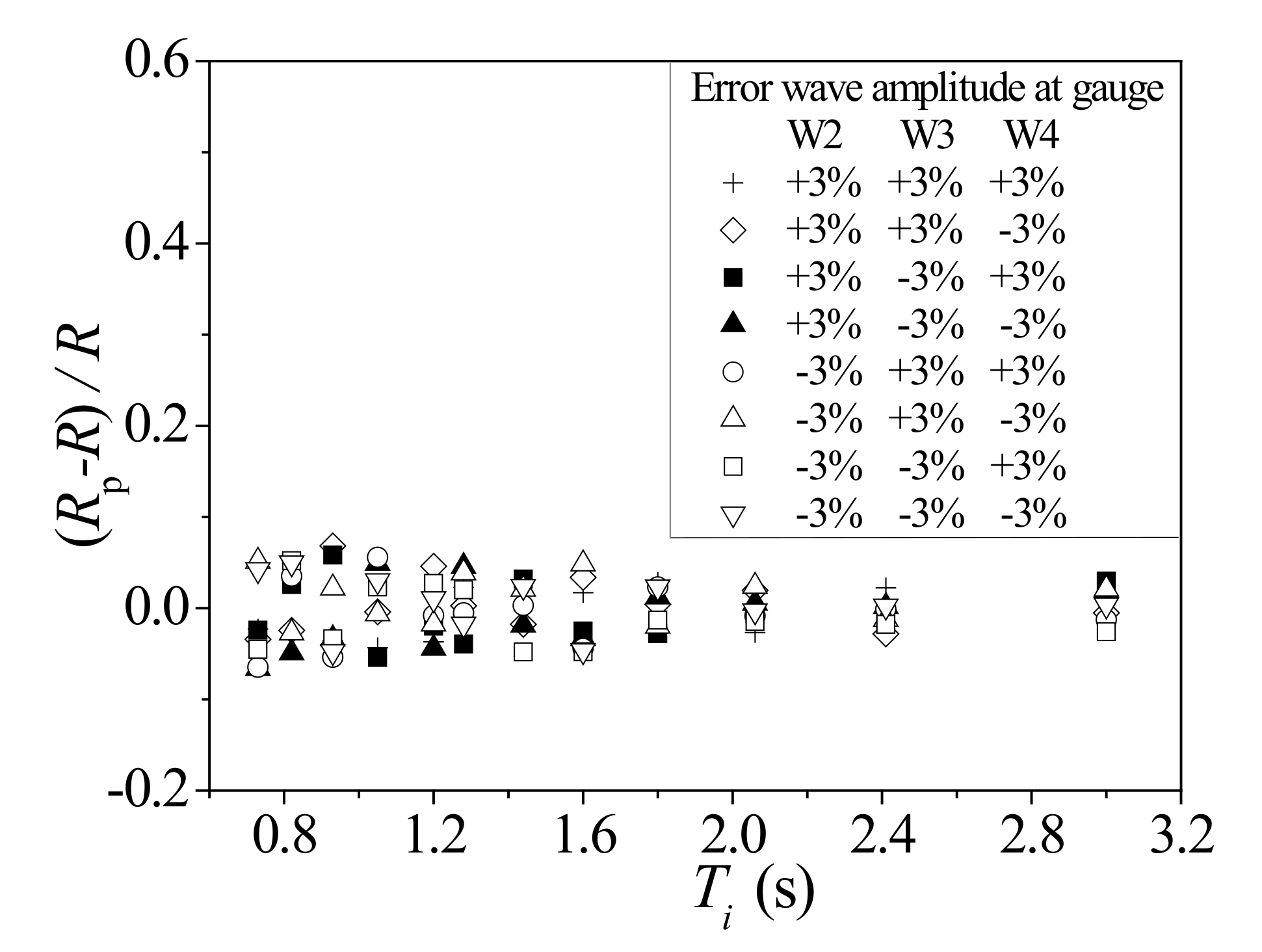
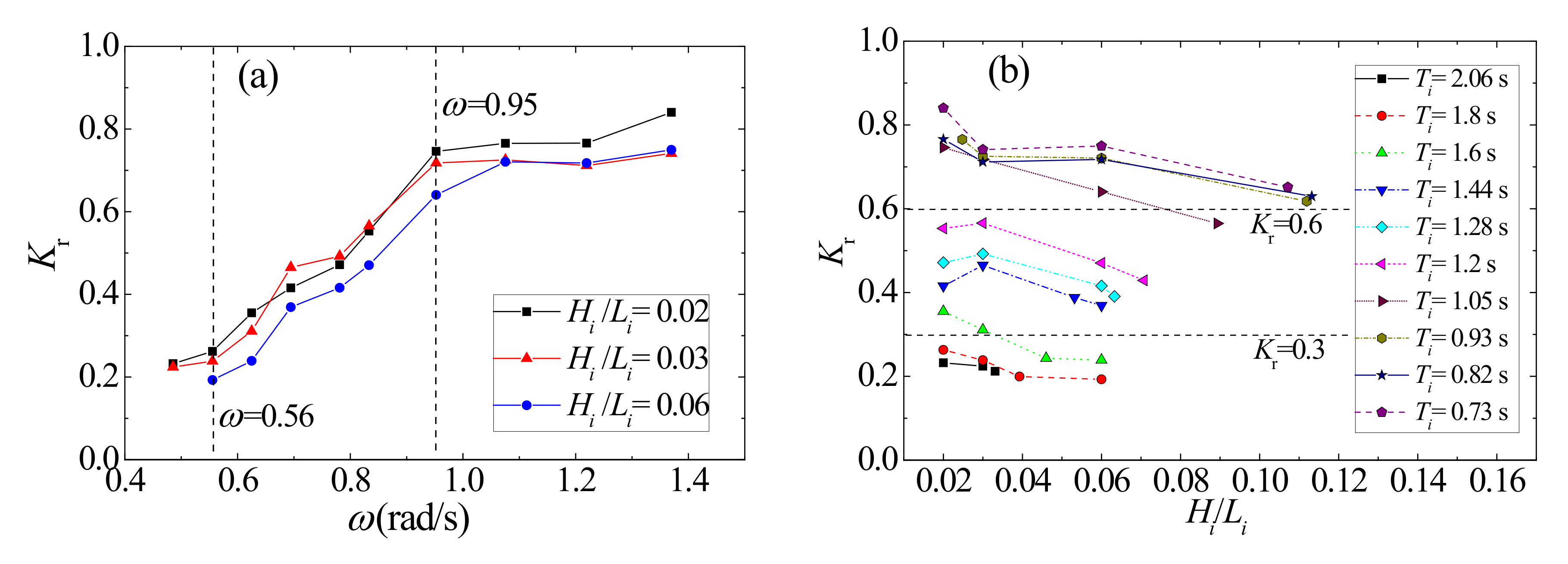
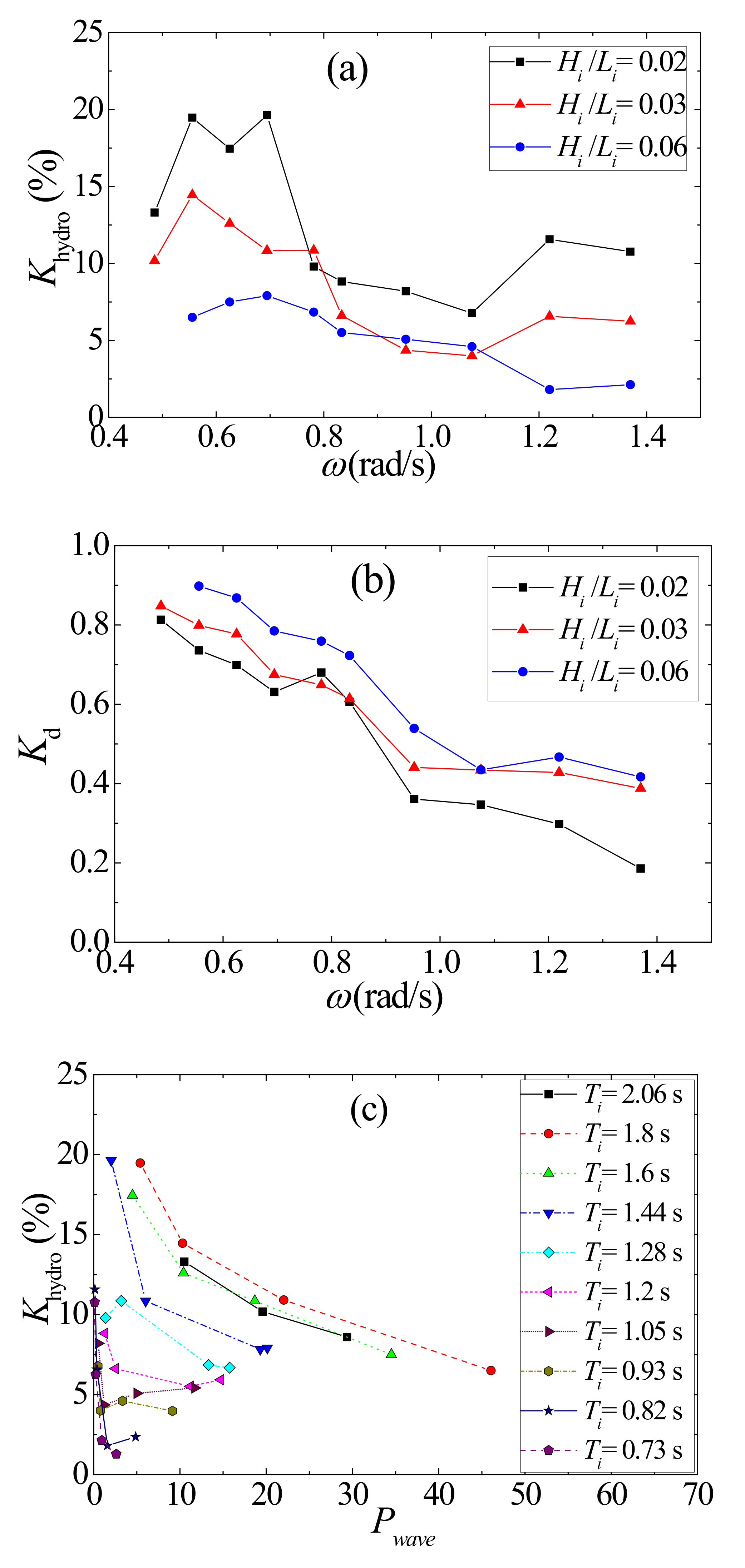
3.2. Evaluation of Wave Reflection Coefficient
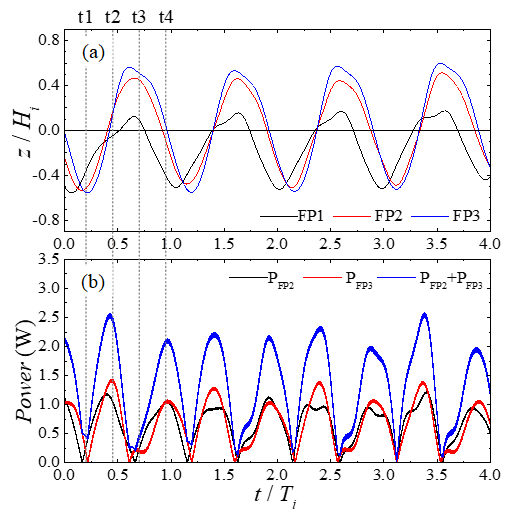
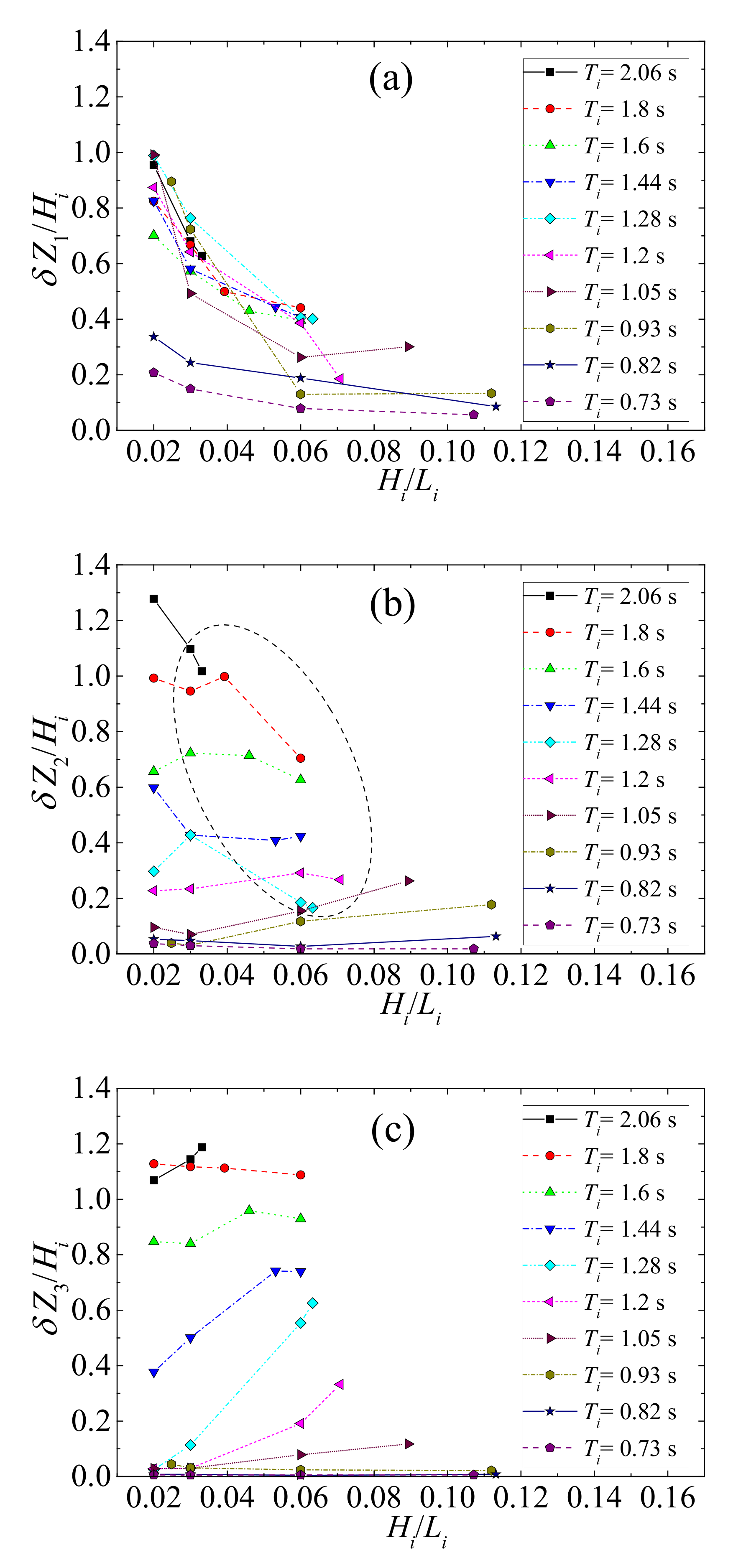
3.3. Dynamic Response of the Floaters
4. Wave Energy Conversion
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Cruz, J. Ocean Wave Energy Current Status and Future Perspectives; Springer: Berlin/Heidelberg, Germany, 2008. [Google Scholar]
- Alcorn, R.; Beattie, W. Observations of time domain data on the wells turbine in the Islay wave-power plant. In Proceedings of the 8th International Offshore and Polar Engineering Conference, Montreal, QC, Canada, 24–29 May 1998; pp. 12–18. [Google Scholar]
- Vicinanza, D.; Frigaard, P. Wave pressure acting on a seawave slot-cone generator. Coast. Eng. 2008, 55, 553–568. [Google Scholar] [CrossRef]
- Tjugen, K. TAPCHAN ocean wave energy project at Java, updated project status. In Proceedings of the Second European Wave Energy Conference, Lisbon, Portugal, 8–10 November 1995; pp. 42–43. [Google Scholar]
- Vicinanza, D.; Di Lauro, E.; Contestabile, P.; Gisonni, C.; Lara, J.L.; Losada, I.J. Review of innovative harbor breakwaters for wave-energy conversion. J. Waterw. Port Coast. Ocean Eng. 2019, 145, 18. [Google Scholar] [CrossRef]
- He, F.; Huang, Z.H.; Law, A.W.K. Hydrodynamic performance of a rectangular floating breakwater with and without pneumatic chambers: An experimental study. Ocean Eng. 2012, 51, 16–27. [Google Scholar] [CrossRef]
- Ning, D.; Zhao, X.; Göteman, M.; Kang, H. Hydrodynamic performance of a pile-restrained WEC-type floating breakwater: An experimental study. Renew. Energy 2016, 95, 531–541. [Google Scholar] [CrossRef]
- Ma, Z.; Mao, Y.; Cheng, Y.; Zhai, G. Effect of the PTO Damping Force on the 2D Oscillating Buoy Wave Energy Converter Integrated into a Pile-Restrained Floating Breakwater. Iran. J. Sci. Technol. Trans. Mech. Eng. 2020, 44, 961–973. [Google Scholar] [CrossRef]
- Zhao, X.L.; Ning, D.Z.; Zou, Q.P.; Qiao, D.S.; Cai, S.Q. Hybrid floating breakwater-WEC system: A review. Ocean Eng. 2019, 186, 106126. [Google Scholar] [CrossRef]
- Martinelli, L.; Ruol, P.; Favaretto, C. Hybrid structure combining a wave energy converter and a floating breakwater. In Proceedings of the 26th International Ocean and Polar Engineering Conference, Rhodes, Greece, 26 June–1 July 2016; pp. 622–628. [Google Scholar]
- Peng, W.; He, R.; Zhang, J.; Xu, T. Wave tank experiments on the power capture of a float-type wave energy device with a breakwater. J. Renew. Sustain. Energy 2018, 10, 054501. [Google Scholar] [CrossRef]
- Ning, D.; Zhao, X.; Zhao, M.; Kang, H. Experimental investigation on hydrodynamic performance of a dual pontoon-power take-off type wave energy converter integrated with floating breakwaters. Proc. Inst. Mech. Eng. Part M J. Eng. Marit. Environ. 2019, 233, 991–999. [Google Scholar] [CrossRef]
- Zhao, X.L.; Ning, D.Z.; Liang, D.F. Experimental investigation on hydrodynamic performance of a breakwater-integrated WEC system. Ocean Eng. 2019, 171, 25–32. [Google Scholar] [CrossRef]
- Zhang, H.M.; Zhou, B.Z.; Vogel, C.; Willden, R.; Zang, J.; Geng, J. Hydrodynamic performance of a dual-floater hybrid system combining a floating breakwater and an oscillating-buoy type wave energy converter. Appl. Energy 2020, 259, 114212. [Google Scholar] [CrossRef]
- Krishnendu, P.; Balaji, R. Hydrodynamic performance analysis of an integrated wave energy absorption system. Ocean Eng. 2020, 195, 106499. [Google Scholar] [CrossRef]
- Flocard, F.; Finnigan, T.D. Laboratory experiments on the power capture of pitching vertical cylinders in waves. Ocean Eng. 2010, 37, 989–997. [Google Scholar] [CrossRef]
- Whittaker, T.; Folley, M. Nearshore oscillating wave surge converters and the development of Oyster. Phil. Trans. R. Soc. A 2012, 370, 345–364. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Michailides, C.; Angelides, D.C. Modeling of energy extraction and behavior of a Flexible Floating Breakwater. Appl. Ocean Res. 2012, 35, 77–94. [Google Scholar] [CrossRef]
- Zheng, S.M.; Zhang, Y.L.; Iglesias, G. Coast/breakwater-integrated OWC: A theoretical model. Mar. Struct. 2019, 66, 121–135. [Google Scholar] [CrossRef]
- Peng, W.; Huang, X.; Fan, Y.; Zhang, J.; Ren, X. Numerical analysis and performance optimization of a submerged wave energy converting device based on the floating breakwater. J. Renew. Sustain. Energy 2017, 9, 044503. [Google Scholar] [CrossRef]
- Brito, M.; Teixeira, L.; Canelas, R.B.; Ferreira, R.M.; Neves, M.G. Experimental and numerical studies of dynamic behaviors of a hydraulic power take-off cylinder using spectral representation method. J. Tribol. 2018, 140, 021102. [Google Scholar] [CrossRef]
- Shi, J.; Zheng, J.H.; Zhang, C.; Joly, A.; Zhang, W.; Xu, P.F.; Sui, T.; Chen, T. A 39-year high resolution wave hindcast for the Chinese coast: Model validation and wave climate analysis. Ocean Eng. 2019, 183, 224–235. [Google Scholar] [CrossRef]
- Rahman, M.A.; Mizutani, N.; Kawasaki, K. Numerical modeling of dynamic responses and mooring forces of submerged floating breakwater. Coast. Eng. 2006, 53, 799–815. [Google Scholar] [CrossRef]
- Mansard, E.P.D.; Funke, E.R. The measurement of incident and reflected spectra using a least squares method. In Proceedings of the 17th International Conference on Coastal Engineering, ASCE, Sydney, Australia, 23–28 March 1980; pp. 154–172. [Google Scholar]
- Chang, H.-K. A three-point method for separating incident and reflected waves over a sloping bed. China Ocean Eng. 2002, 16, 499–511. [Google Scholar]
- McCormick, M.E. Ocean Engineering Wave Mechanics; Wiley-Interscience: New York, NY, USA, 1973. [Google Scholar]
- Koutandos, E.; Prinos, P.; Gironella, X. Floating breakwaters under regular and irregular wave forcing: Reflection and transmission characteristics. J. Hydraul. Res. 2005, 43, 174–188. [Google Scholar]
- Drimer, N.; Agnon, Y.; Stiassnie, M. A simplified analytical model for a floating breakwater in water of finite depth. Appl. Ocean Res. 1992, 14, 33–41. [Google Scholar]
- Zhao, X.; Ning, D. Experimental investigation of breakwater-type WEC composed of both stationary and floating pontoons. Energy 2018, 155, 226–233. [Google Scholar]
- Tolba, E.R.A.S. Behaviour of Floating Breakwaters under Wave Action. Ph.D. Thesis, Suez Canal University, Ismaïlia, Egypt, 1998. [Google Scholar]
- Budar, K.; Falnes, J. A resonant point absorber of ocean-wave power. Nature 1975, 256, 478–479. [Google Scholar]
- Folley, M.; Whittaker, T.; Henry, A. The effect of water depth on the performance of a small surging wave energy converter. Ocean Eng. 2007, 34, 1265–1274. [Google Scholar]
- Sun, S.Y.; Sun, S.L.; Wu, G.X. Fully nonlinear time domain analysis for hydrodynamic performance of an oscillating wave surge converter. China Ocean Eng. 2018, 32, 582–592. [Google Scholar]
- Isaacson, M.; Nwogu, O.U. Wave loads and motions of long structures in directional seas. J. Offshore Mech. Arct. Eng. 1987, 109, 126–132. [Google Scholar]
- Flocard, F.; Finnigan, T.D. Increasing power capture of a wave energy device by inertia adjustment. Appl. Ocean Res. 2012, 34, 126–134. [Google Scholar]
- Têtu, A.; Ferri, F.; Kramer, M.B.; Todalshaug, J.H. Physical and Mathematical Modeling of a Wave Energy Converter Equipped with a Negative Spring Mechanism for Phase Control. Energies 2018, 11, 23. [Google Scholar]
- Folley, M.; Whittaker, T.; Osterried, M. The oscillating wave surge converter. In Proceedings of the 14th International Offshore and Polar Engineering Conference, Toulon, France, 23–28 May 2004; pp. 189–193. [Google Scholar]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Wave Period Ti (s) | Water Depth h (m) | Wave Steepness Hi/Li | Dynamo Load RFP (Ω) |
|---|---|---|---|
| 0.73; 0.82; 0.93; 1.05; 1.20; 1.28; 1.44; 1.60; 1.80 | 0.6 | 0.02; 0.03; 0.06 | 5.0 |
| 2.06 | 0.6 | 0.02; 0.03 | 5.0 |
| Wave Period Ti (s) | Water Depth h (m) | Wave Height Hi (m) | Dynamo Load RFP (Ω) |
|---|---|---|---|
| 0.73 | 0.6 | 0.09 | 5.0 |
| 0.82 | 0.6 | 0.12 | 5.0 |
| 0.93; 1.05; 1.20; 1.28; 1.44; 1.60; 1.80; 2.06 | 0.6 | 0.15 | 5.0 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Peng, W.; Zhang, Y.; Yang, X.; Zhang, J.; He, R.; Liu, Y.; Chen, R. Hydrodynamic Performance of a Hybrid System Combining a Fixed Breakwater and a Wave Energy Converter: An Experimental Study. Energies 2020, 13, 5740. https://doi.org/10.3390/en13215740
Peng W, Zhang Y, Yang X, Zhang J, He R, Liu Y, Chen R. Hydrodynamic Performance of a Hybrid System Combining a Fixed Breakwater and a Wave Energy Converter: An Experimental Study. Energies. 2020; 13(21):5740. https://doi.org/10.3390/en13215740
Chicago/Turabian StylePeng, Wei, Yingnan Zhang, Xueer Yang, Jisheng Zhang, Rui He, Yanjun Liu, and Renwen Chen. 2020. "Hydrodynamic Performance of a Hybrid System Combining a Fixed Breakwater and a Wave Energy Converter: An Experimental Study" Energies 13, no. 21: 5740. https://doi.org/10.3390/en13215740
APA StylePeng, W., Zhang, Y., Yang, X., Zhang, J., He, R., Liu, Y., & Chen, R. (2020). Hydrodynamic Performance of a Hybrid System Combining a Fixed Breakwater and a Wave Energy Converter: An Experimental Study. Energies, 13(21), 5740. https://doi.org/10.3390/en13215740