Distributed Control of Clustered Populations of Thermostatic Loads in Multi-Area Systems: A Mean Field Game Approach



Abstract
:1. Introduction
1.1. Relevant Work
1.2. Contributions
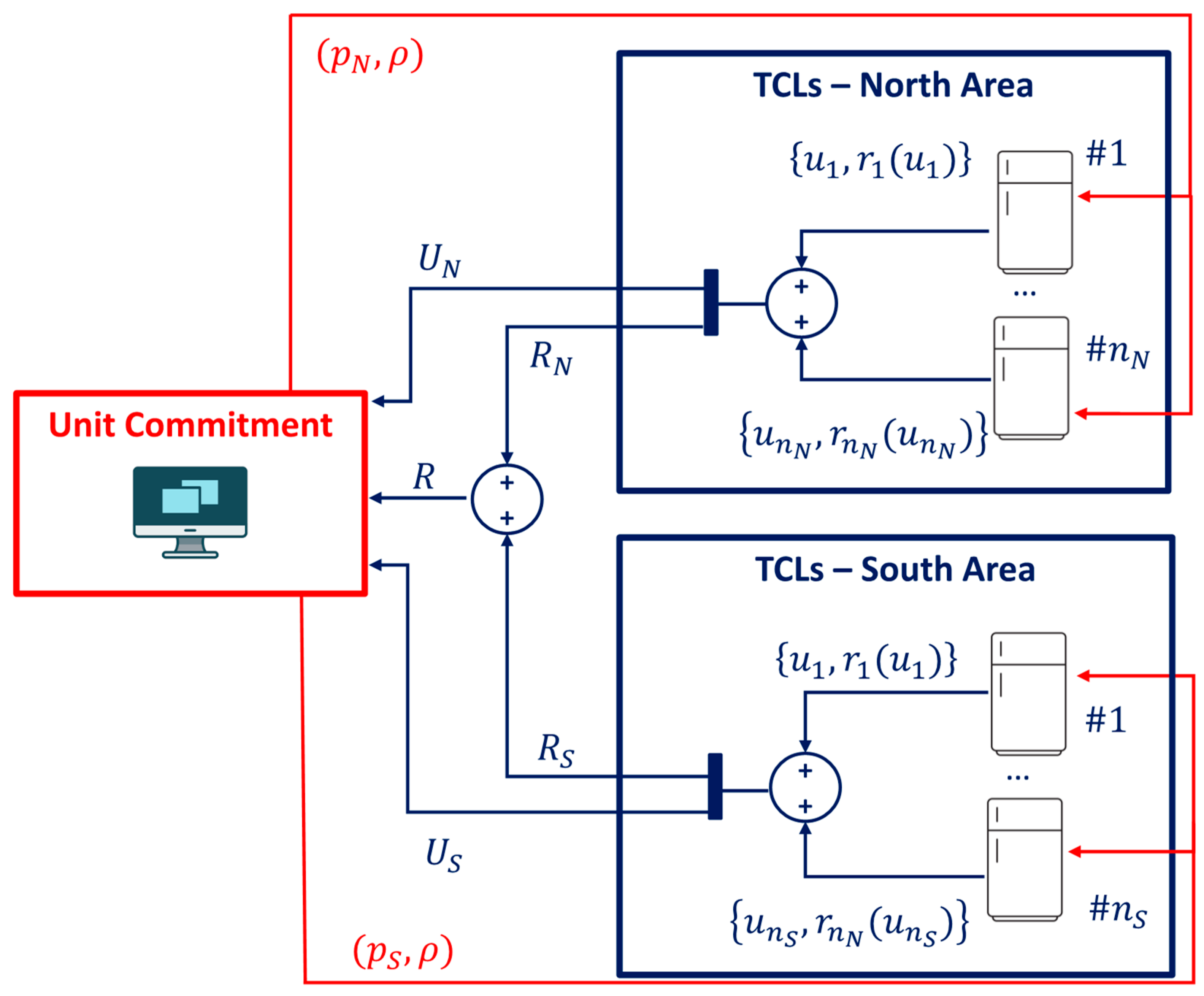
- A novel modeling formulation based on the initial contribution in [23] is proposed and applied to the realistic case of multi-area power systems. In other words, the UC model integrates network topology constraints leading to the broadcast of multiple and area-dependent price signals to TCLs, which are distributed among the busbars of the system. Besides the novel integration of constraints on the network-topology, the UC model includes inertia-dependent frequency response (FR) constraints which participate in the characterization of the system operation, generating energy and FR price signals that account for multiple generation technologies.
- The mean field game modeling framework proposed in [23] is extended in order to overcome the standard “players homogeneity” assumption. Ad hoc modifications of the canonical mean field game equations allow to describe a finite (low) number of diverse heterogeneous population. This is combined with clustering techniques to obtain an accurate description of a large number of heterogeneous devices. This methodological novelty is specifically utilized in this work to quantify the potential flexibility benefits of thermostatically controlled loads in a multi-area system but it could also be used in other mean field applications such as communication networks and crowd dynamics.
- The convergence to equilibrium of the proposed modeling approach, envisaging multiple prices’ formation and multiple representative clusters of TCLs, is demonstrated through detailed case studies based on a typical 2030 Great Britain (GB) power system scenario, characterized by large penetration of renewable sources.
1.3. Paper Structure
2. Model Setup and Assumptions
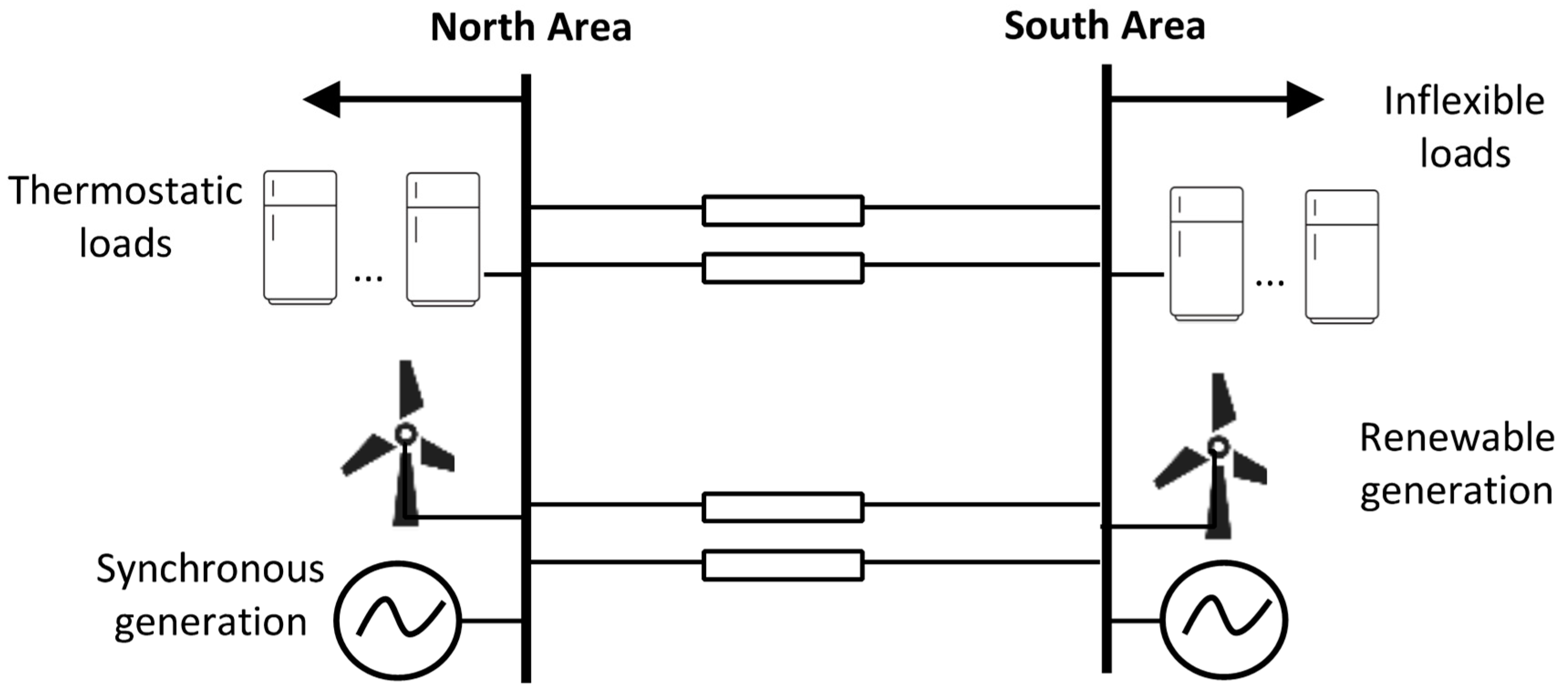
2.1. Power System Model and TCLs-System Interactions
2.2. The Unit Commitment Problem
2.2.1. Modeling Assumptions
2.2.2. Mathematical Formulation
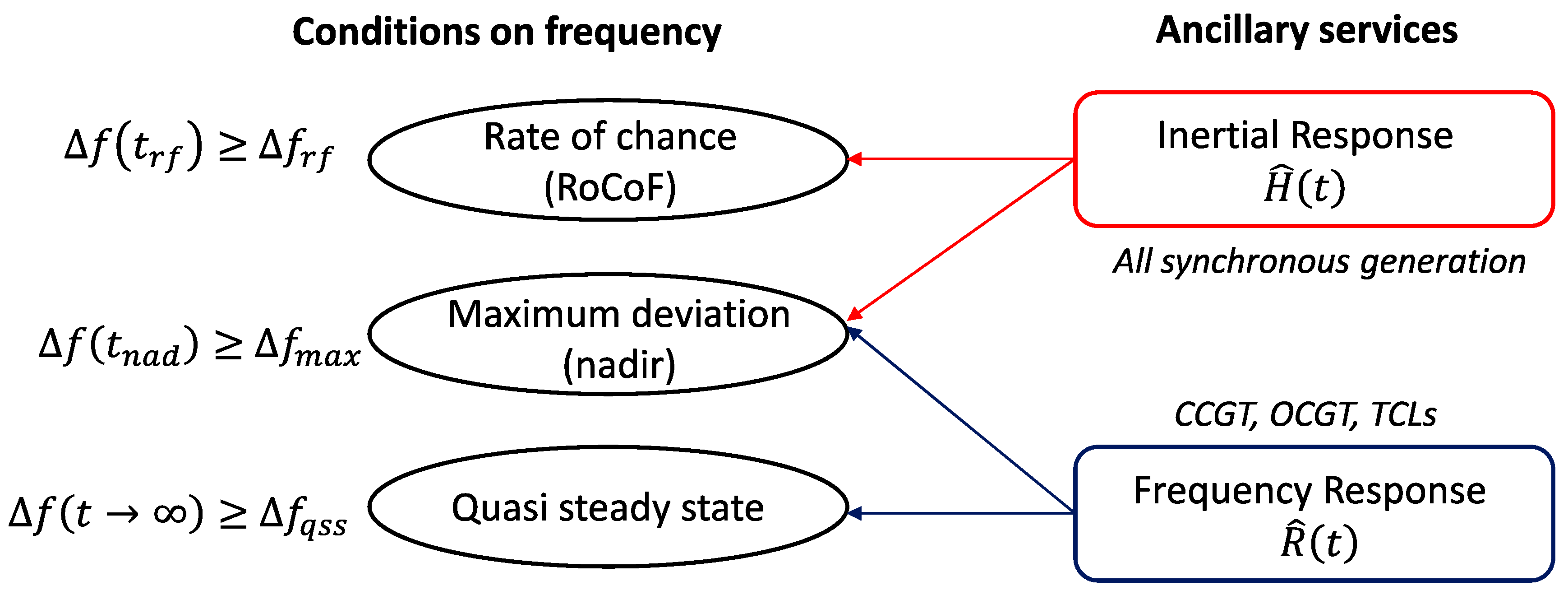
2.2.3. Characterizing the Energy and FR Prices
2.3. Modeling Thermostatically Controlled Loads
The Agent-Based Approach
3. The Mean Field Game Formulation
- The first PDE is an Hamilton–Jacobi–Bellman equation that returns the value function V associated to the TCL optimization problem. Denoting the argument of the integral (18) with , this can be defined as:where denotes the partial derivative of with respect to . According to the dynamic programming principle [30], this equation can be integrated backward in time to determine the optimal control of the individual TCL as a function of time and its temperature variables and , according to the following expression:
- The second PDE is a transport equation which characterizes the evolution in time of the state distribution when is applied:
3.1. Clustering the Population of TCLs
3.2. Enabling the Smart Control of TCLs
4. Case Studies and Results
4.1. Numerical Assumptions
4.2. Simulation Results of the Base Case
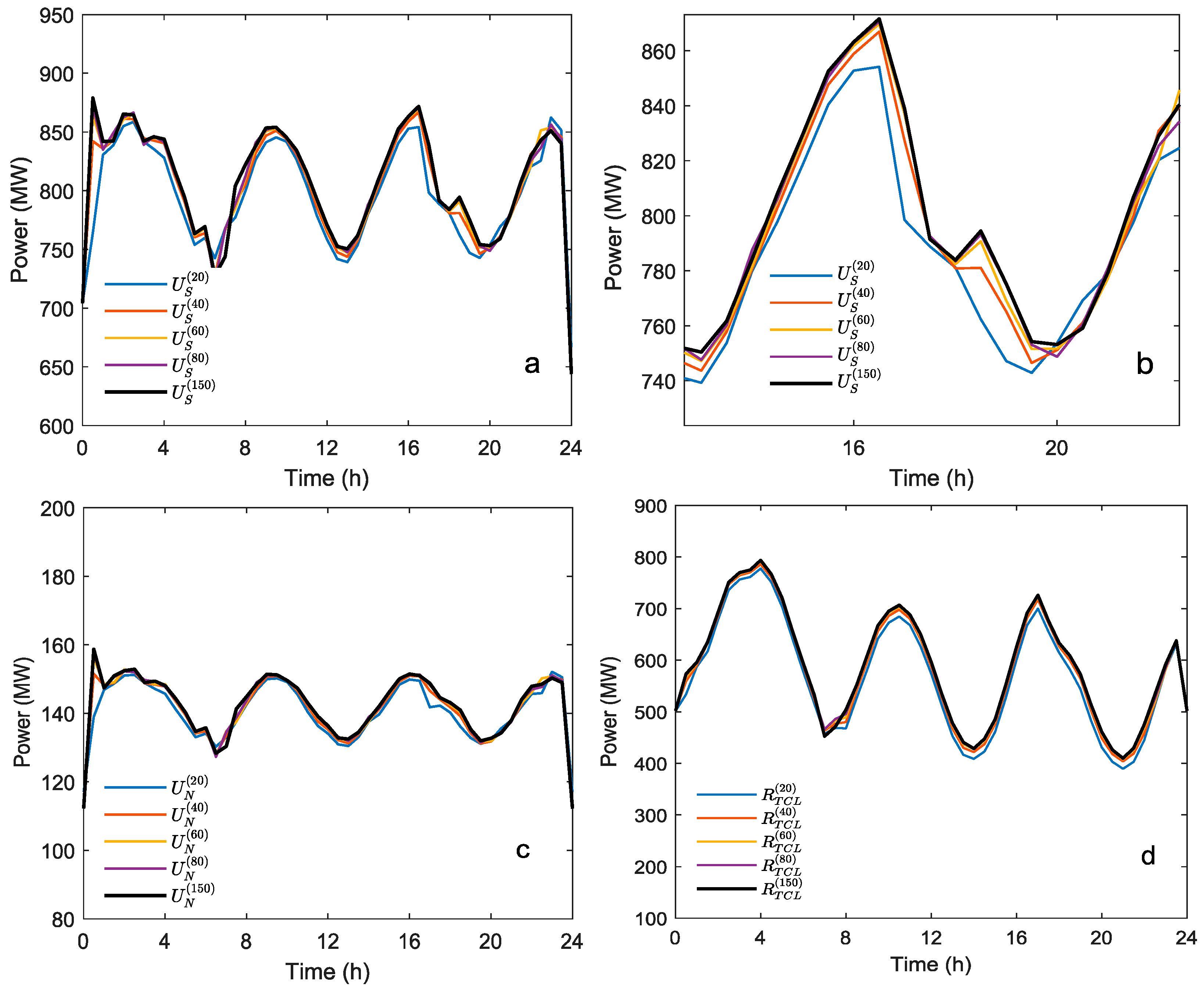
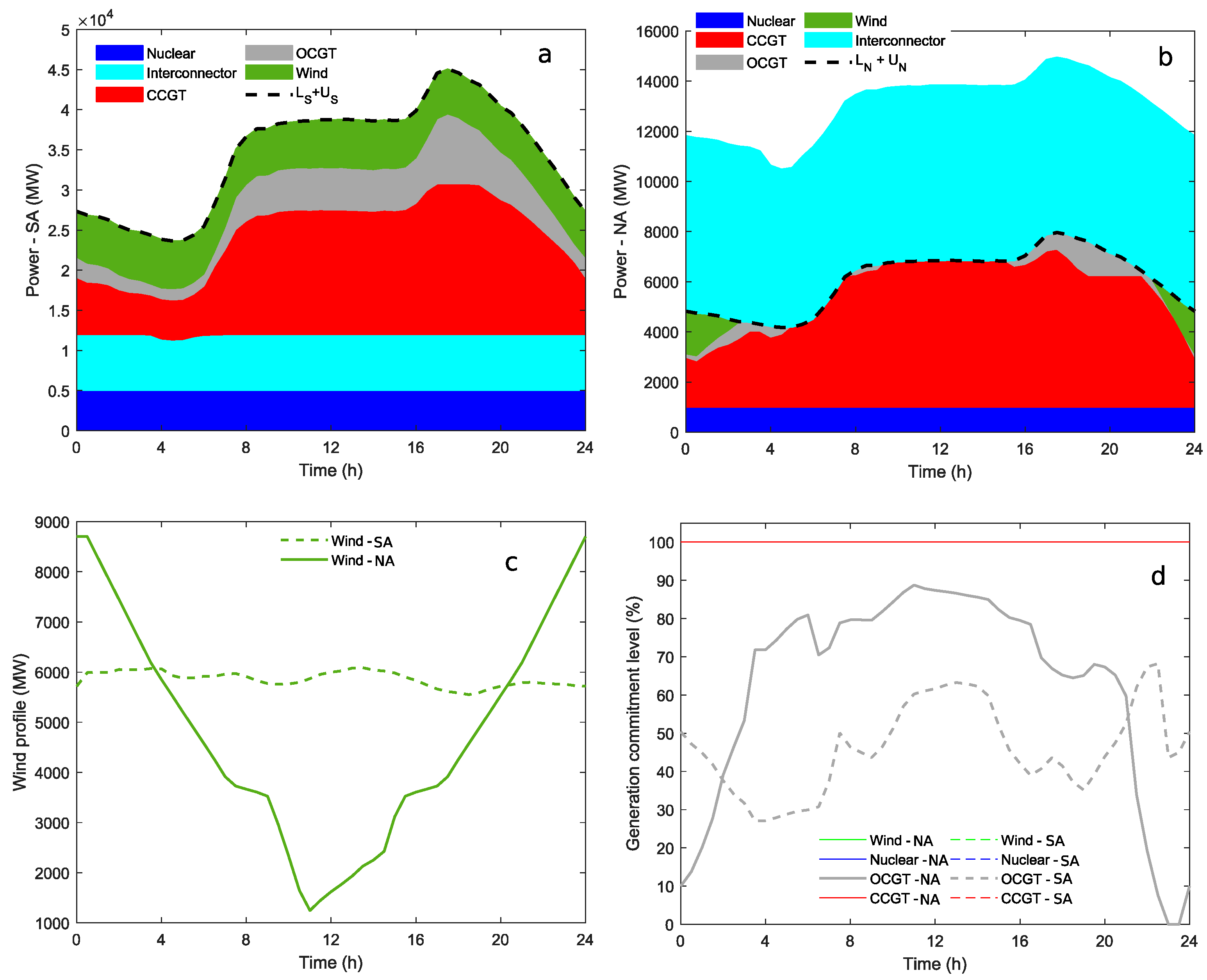
4.2.1. TCL Aggregate Consumption and Energy/FR Prices
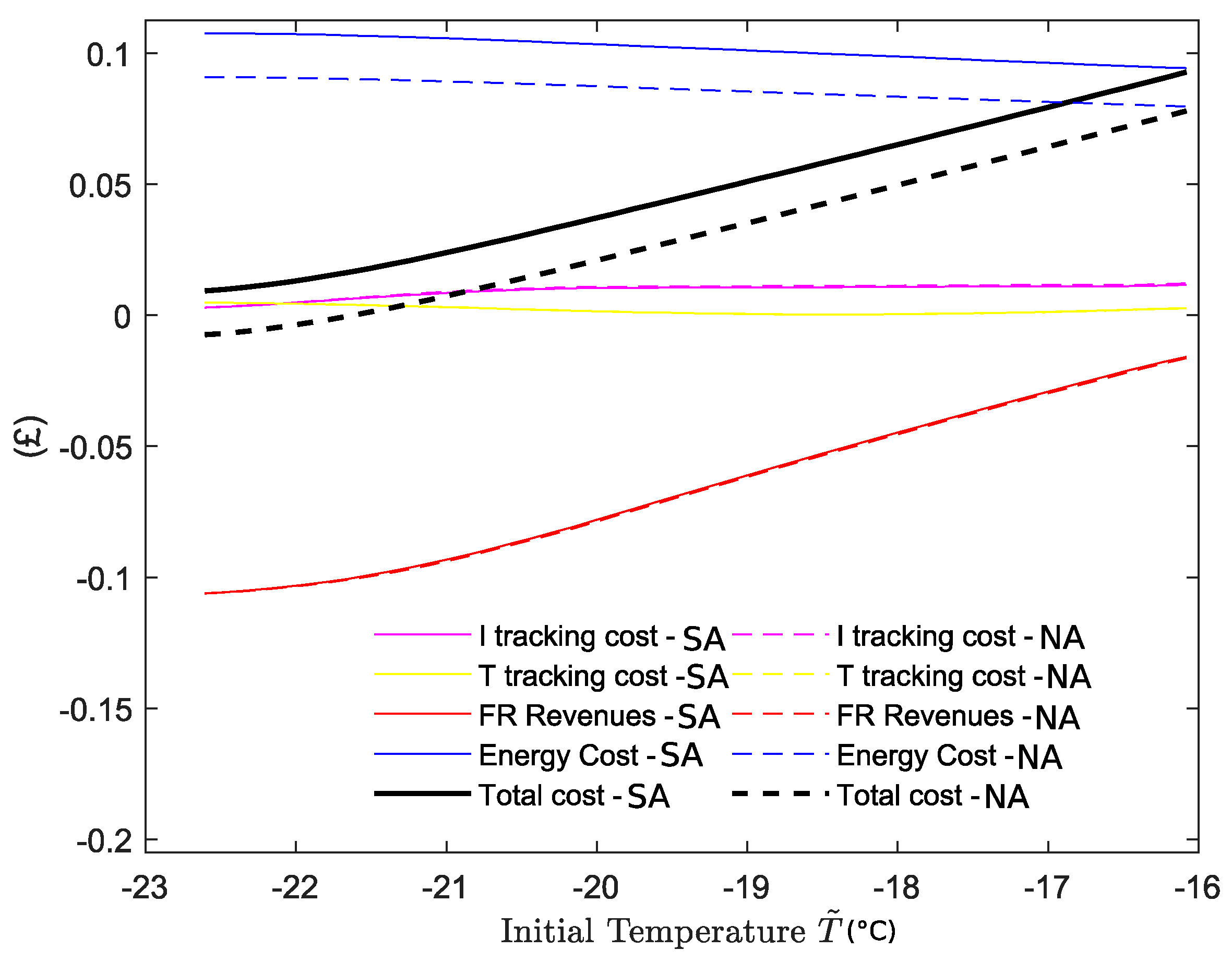
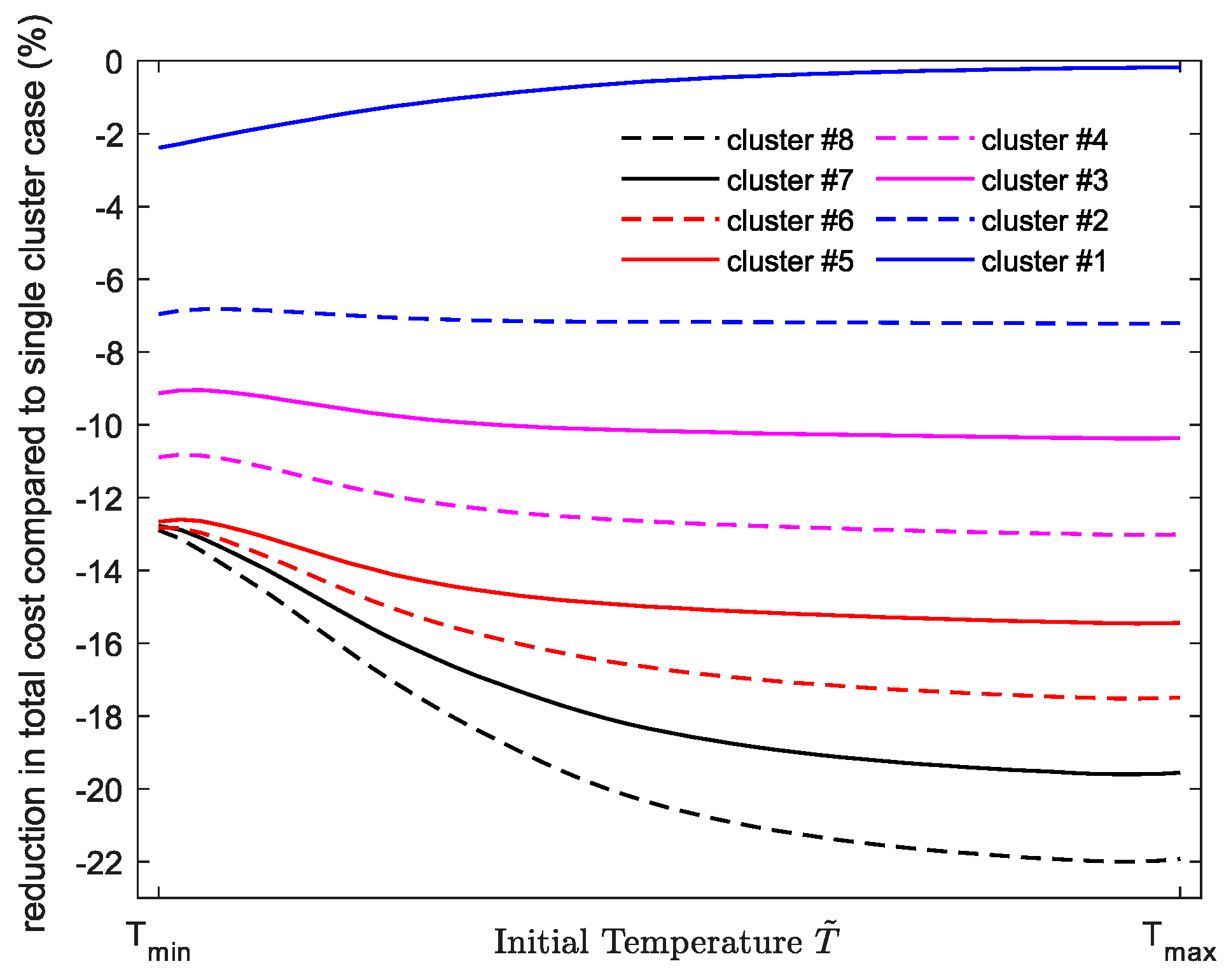
4.2.2. Assessing the Cost Components of Individual TCLs
- If all rational participants were to perform this change, the initial temperature distribution would change significantly, thus leading to a different equilibrium solution for which the new values of initial temperature are potentially suboptimal.
- In realistic contexts, the uncertainty and noise associated to the operation of the TCL would lead to a more diversified temperature distribution, thus reducing the impact of the initial temperature state on costs.
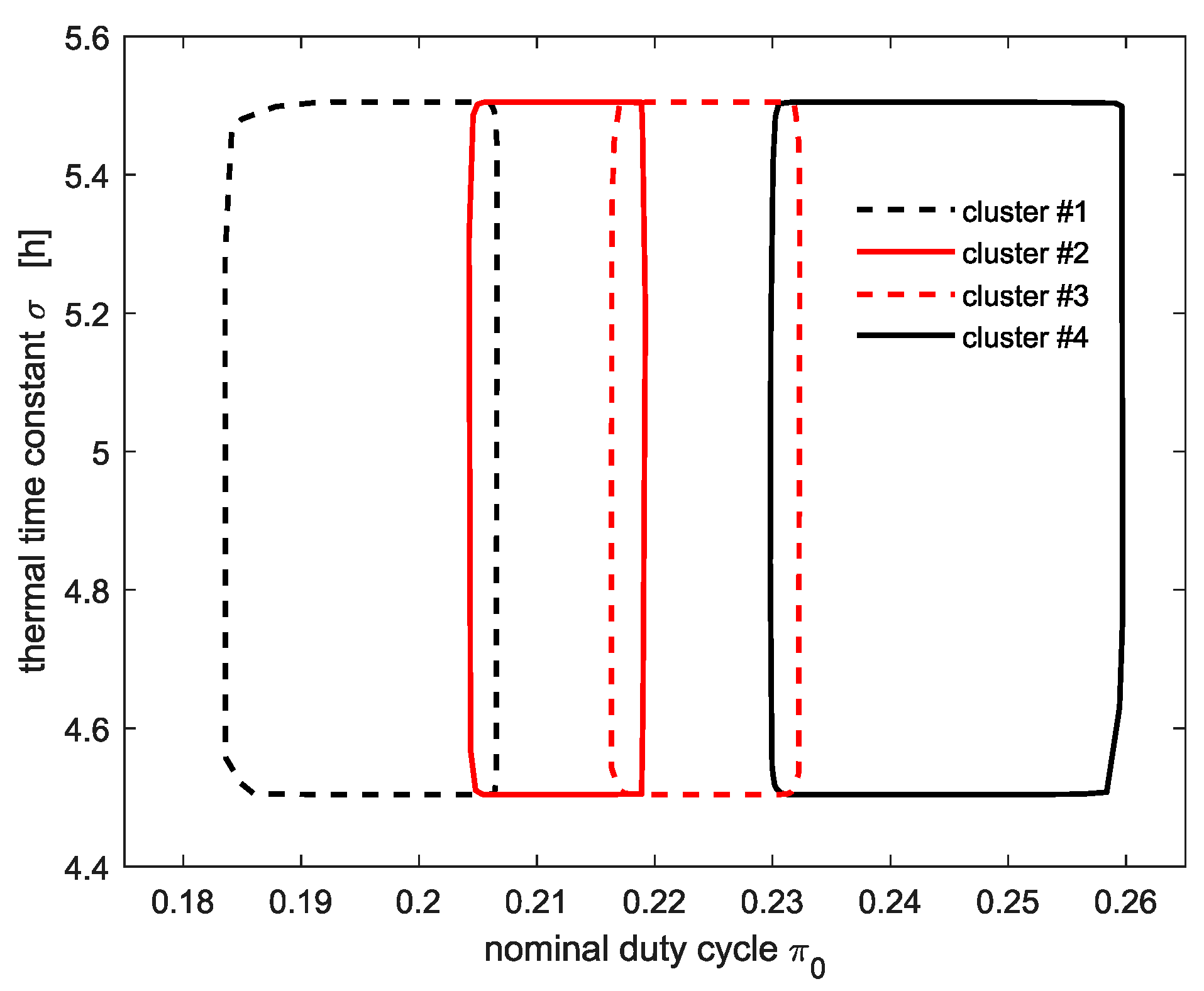
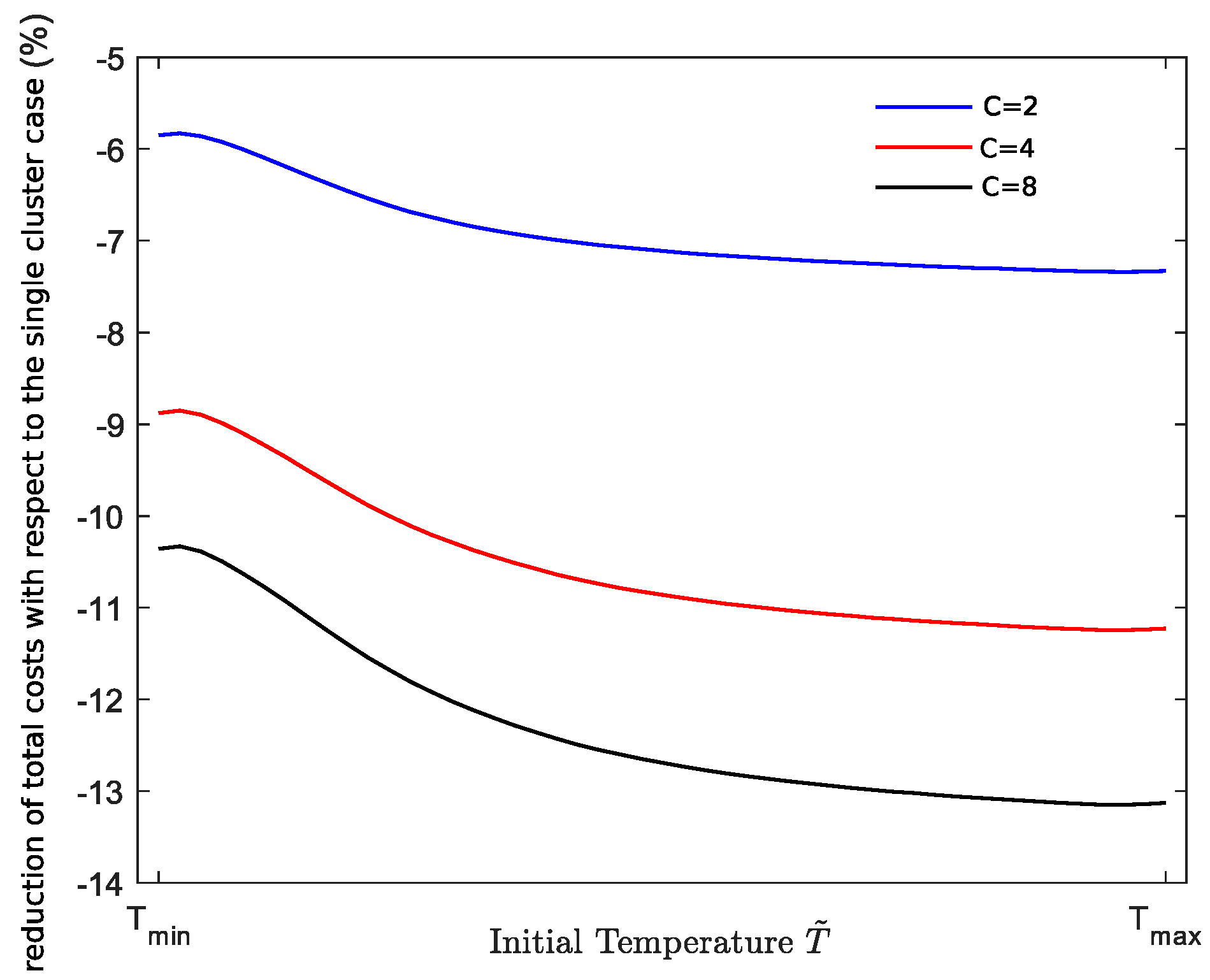
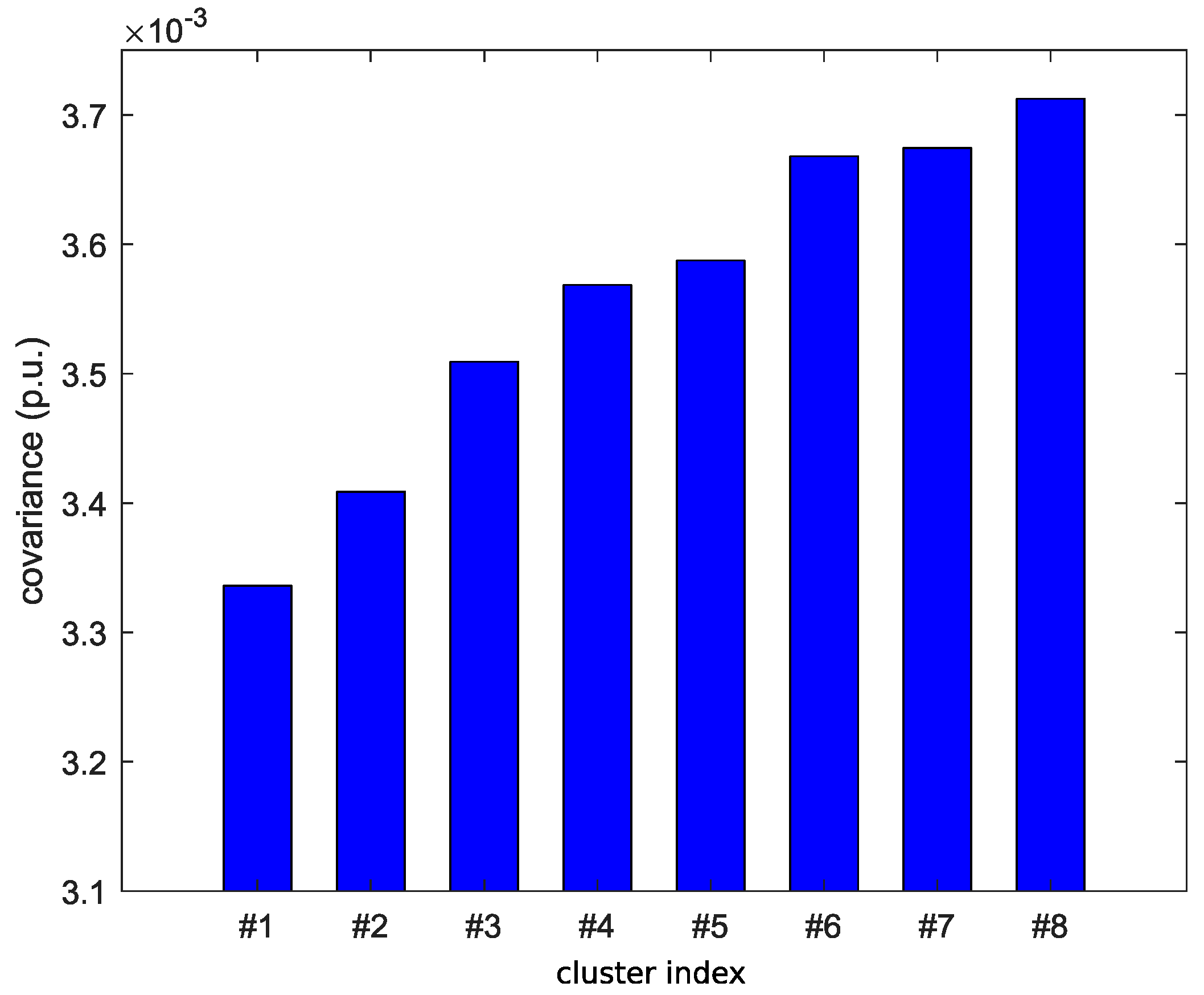
4.3. Impact of Clustering TCLs Populations
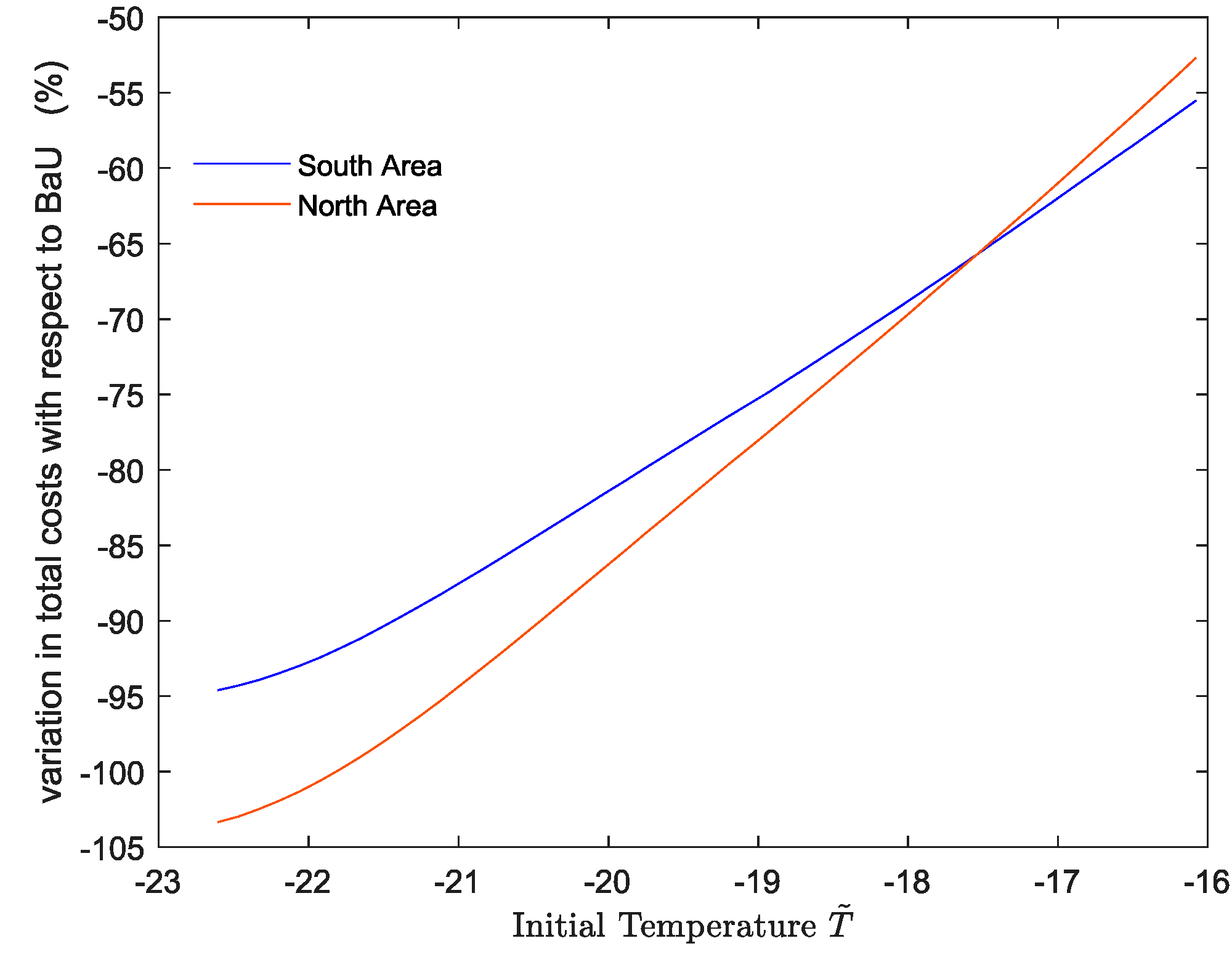
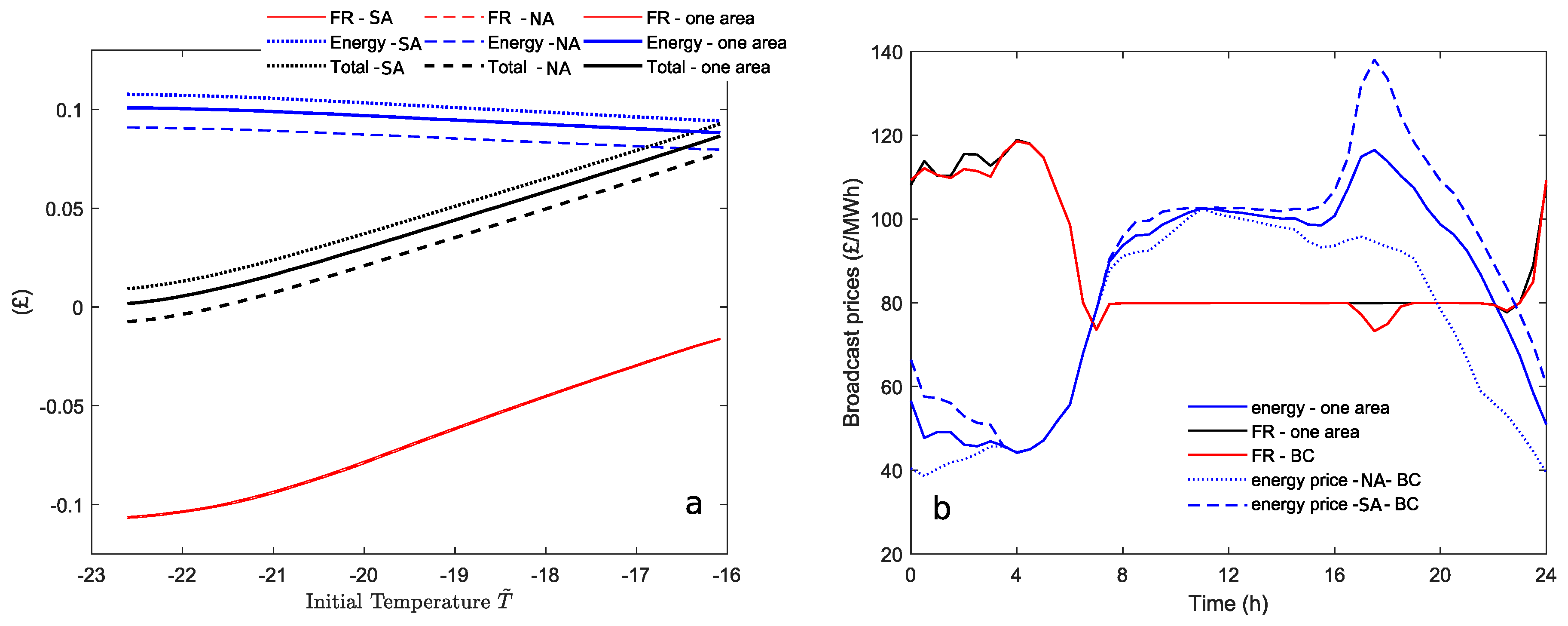
4.4. Multi-Area vs. Single-Area Scheduling
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
Nomenclature
| Acronyms | |
| AC | Alternating current |
| BaU | Business as usual |
| BC | Base case |
| CCGT | Combined cycle gas turbine |
| DCS | Distributed coordination strategy |
| FR | Frequency response |
| GB | Great Britain |
| HVDC | High voltage direct current |
| N | North |
| NA | North area |
| OCGT | Open cycle gas turbine |
| PDE | Partial differential equation |
| RoCoF | Rate of change of frequency |
| S | South |
| SA | South area |
| TCL | Thermostatically Controlled Load |
| UC | Unit commitment |
| Indices | |
| Index of generation technology | |
| Index of system area | |
| Index of TCL cluster | |
| Index of linearization cuts | |
| Parameters | |
| No-load cost of generation technology in area (£/MWh) | |
| Linear cost of generation technology in area (£/MWh) | |
| Quadratic cost of generation technology in area (£/MW2h) | |
| Headroom for FR of generation technology in area | |
| FR slope of generation technology in area | |
| Installed capacity of generation technology in area (MW) | |
| Maximum infeed loss (MW) | |
| Load damping (Hz-1) | |
| Maximum frequency deviation (Hz) | |
| Quasi-steady-state frequency limit (Hz) | |
| Frequency deviation for RoCoF (Hz) | |
| Time interval for RocoF (s) | |
| Delivery time for FR (s) | |
| Nominal frequency (Hz) | |
| Constant of inertia of generation technology in area (s) | |
| Constant of inertia of infeed generation loss (s) | |
| Thermal time constant of TCL in cluster (h) | |
| Ambient temperature of TCL in cluster (°C) | |
| Maximum temperature of TCL in cluster (°C) | |
| Minimum temperature of TCL in cluster (°C) | |
| Asymptotic cooling temperature of TCL in cluster (°C) | |
| Heat exchange parameter of TCL in cluster (W/°C) | |
| Duty cycle of TCL in cluster | |
| TCL power in cluster (W) | |
| Time horizon (h) | |
| Number of TCLs in area and cluster | |
| Target temperature (°C) | |
| Discomfort cost parameter (£/h(°C)2) | |
| Antisynchronization cost parameter (£/h(°C)2) | |
| Aggregate TCL steady state power in area and cluster (MW) | |
| Number of clusters of TCLs | |
| Interconnector’s capacity (MW) | |
| Commitment parameter | |
| Number of linearization cuts | |
| Set of TCLs’ parameters | |
| Number of TCLs’ parameters used for clustering | |
| Set of TCLs in cluster | |
| Mean of TCLs’ parameters in cluster | |
| Functions | |
| Energy price in area (£/MWh) | |
| FR price in area (£/MWh) | |
| Aggregate TCL power in area (MW) | |
| Aggregate TCL power in area and cluster (MW) | |
| Aggregate FR from TCLs (MW) | |
| Set of generation decision variables in areas | |
| Power flow through the interconnector (MW) | |
| Commitment level of generation technology in area | |
| Dispatch level of generation technology in area (MW) | |
| FR from generation technology in area (MW) | |
| Minimized total generation costs per unit of time (£/h) | |
| Inflexible load in area | |
| System post-fault inertial response (MWs2) | |
| System FR allocation (MW) | |
| Nadir constraint requirement function (MWs) 2 | |
| Internal temperature of TCL (°C) | |
| Temperature variation of TCL (°C) | |
| Power consumption of TCL in area and cluster (W) | |
| TCL temperature dynamics (°C/s) | |
| Fraction of TCL power consumption allocated as FR | |
| Allocated FR of TCL in area and cluster (W) | |
| Cost function of TCL (£) | |
| Target temperature variation (°C) | |
| Terminal cost function (£) | |
| Value function for cost-minimization of TCL in area and cluster (£) | |
| Optimal feedback control of TCL in area and cluster (W) | |
| State distribution of TCLs in area and cluster | |
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| 1 | −16.08 | −22.61 | 21.98 | 0.88 | 4.55 | 9,557,375 | 1,686,596 |
| 2 | −14.58 | −20.58 | 20.17 | 0.95 | 4.54 | 3,332,505 | 588,089 |
| −16.08 | −22.61 | 21.98 | 0.88 | 4.55 | 8,854,945 | 1,562,637 | |
| 4 | −14.01 | −20.11 | 19.34 | 0.98 | 4.52 | 5,980,191 | 1,055,328 |
| −15.01 | −21.16 | 20.72 | 0.93 | 4.56 | 5,776,760 | 1,019,428 | |
| −14.70 | −20.73 | 20.21 | 0.96 | 4.54 | 4,193,085 | 739,956 | |
| −16.09 | −22.59 | 21.98 | 0.88 | 4.55 | 3,250,781 | 573,667 | |
| 8 | −14.76 | −20.73 | 19.87 | 0.95 | 4.54 | 1,016,350 | 179,356 |
| −13.57 | −19.75 | 18.88 | 0.99 | 4.57 | 2,606,425 | 459,957 | |
| −15.45 | −21.72 | 21.14 | 0.91 | 4.55 | 3,266,268 | 576,400 | |
| −14.73 | −20.80 | 20.39 | 0.94 | 4.56 | 2,160,742 | 381,307 | |
| −14.03 | −20.13 | 19.31 | 0.98 | 4.55 | 3,110,704 | 548,948 | |
| −15.06 | −21.21 | 20.75 | 0.93 | 4.56 | 1,431,354 | 252,592 | |
| −16.09 | −22.57 | 21.99 | 0.88 | 4.55 | 2,886,580 | 509,396 | |
| −14.42 | −20.45 | 19.59 | 0.97 | 4.58 | 9,557,375 | 1,686,596 |
Appendix B

References
- Brouwer, A.S.; van den Broek, M.; Zappa, W.; Turkenburg, W.C.; Faaijac, A. Least-cost options for integrating intermittent renewables in low-carbon power systems. Appl. Energy 2016, 161, 48–74. [Google Scholar] [CrossRef] [Green Version]
- National Grid. Electricity Ten Year Statement (ETYS). 2019. Available online: https://www.nationalgrideso.com/research-publications/electricity-ten-year-statement-etys (accessed on 28 October 2020).
- Siano, P.; Sarno, D. Assessing the benefits of residential demand response in a real time distribution energy market. Appl. Energy 2016, 161, 533–551. [Google Scholar] [CrossRef]
- Zehir, M.A.; Batman, A.; Bagriyanik, M. Review and comparison of demand response options for more effective use of renewable energy at consumer level. Renew. Sustain. Energy Rev. 2016, 56, 631–642. [Google Scholar] [CrossRef]
- Wang, P.; Wu, D.; Kalsi, K. Flexibility Estimation and Control of Thermostatically Controlled Loads with Lock Time for Regulation Service. IEEE Trans. Smart Grid 2020, 11, 3221–3230. [Google Scholar] [CrossRef]
- Trovato, V.; Tindemans, S.; Strbac, G. Leaky storage model for optimal multi-service allocation of thermostatic loads. IET Gener. Transm. Distrib. 2016, 10, 585–593. [Google Scholar] [CrossRef] [Green Version]
- Conte, F.; Massucco, S.; Silvestro, F.; Ciapessoni, E.; Cirio, D. Stochastic modelling of aggregated thermal loads for impact analysis of demand side frequency regulation in the case of Sardinia in 2020. Int. J. Electr. Power Energy Syst. 2017, 93, 291–307. [Google Scholar] [CrossRef]
- Callaway, D.S.; Hiskens, I.A. Achieving controllability of electric loads. Proc. IEEE 2011, 99, 184–199. [Google Scholar] [CrossRef] [Green Version]
- Hao, H.; Sanandaji, B.M.; Poolla, K.; Vincent, T.L. Aggregate flexibility of thermostatically controlled loads. IEEE Trans. Power Syst. 2015, 30, 189–198. [Google Scholar] [CrossRef]
- Song, M.; Gao, C.; Shahidehpour, M.; Li, Z.; Yang, J.; Yan, H. State space modeling and control of aggregated TCLs for regulation services in power grids. IEEE Trans. Smart Grid 2019, 10, 4095–4106. [Google Scholar] [CrossRef]
- Singh, K.; Padhy, N.P.; Sharma, J. Influence of price responsive demand shifting bidding on congestion and lmp in pool-based day-ahead electricity markets. IEEE Trans. Power Syst. 2011, 26, 886–896. [Google Scholar] [CrossRef]
- Papadaskalopoulos, D.; Strbac, G. Nonlinear and randomized pricing for distributed management of flexible loads. IEEE Trans. Smart Grid 2016, 7, 137–1146. [Google Scholar] [CrossRef] [Green Version]
- Gu, C.; Yan, X.; Yan, Z.; Li, F. Dynamic pricing for responsive demand to increase distribution network efficiency. Appl. Energy 2017, 2015, 236–243. [Google Scholar] [CrossRef] [Green Version]
- Li, S.; Zhang, W.; Lian, J.; Kalsi, K. Market based coordination of thermostatically controlled loads—part i: A mechanism design formulation. IEEE Trans. Power Syst. 2016, 31, 1170–1178. [Google Scholar] [CrossRef]
- Gan, L.; Topcu, U.; Low, S.H. Optimal decentralized protocol for electric vehicle charging. IEEE Trans. Power Syst. 2013, 28, 940–951. [Google Scholar] [CrossRef] [Green Version]
- Ma, Z.; Callaway, D.; Hiskens, I. Decentralized charging control of large populations of plug-in electric vehicles. IEEE Trans. Control Syst. Technol. 2013, 21, 67–78. [Google Scholar] [CrossRef]
- Grammatico, S. Dynamic control of agents playing aggregative games. IEEE Trans. Autom. Control 2017, 62, 4537–4548. [Google Scholar] [CrossRef] [Green Version]
- De Paola, A.; Angeli, D.; Strbac, G. Price-based schemes for distributed coordination of flexible demand in the electricity market. IEEE Trans. Smart Grid 2017, 8, 3104–3116. [Google Scholar] [CrossRef]
- Lasry, J.; Lions, P. Mean field games. Jpn. J. Math. 2007, 2, 229–260. [Google Scholar] [CrossRef] [Green Version]
- Huang, M.; Caines, P.E.; Malhamé, R.P. Large population stochastic dynamic games: Closed-loop mckean-vlasov systems and the nash certainty equivalence principle. Commun. Inf. Syst. 2006, 6, 221–252. [Google Scholar]
- Bauso, D. Dynamic demand and mean field games. IEEE Trans. Autom. Control 2017, 62, 6310–6323. [Google Scholar] [CrossRef] [Green Version]
- Kizilkale, A.C.; Salhab, R.; Malhamé, R.P. An integral control formulation of mean field game based large scale coordination of loads in smart grids. Automatica 2019, 100, 312–322. [Google Scholar] [CrossRef] [Green Version]
- De Paola, A.; Trovato, V.; Angeli, D.; Strbac, G. A Mean Field Game Approach for Distributed Control of Thermostatic Loads Acting in Simultaneous Energy-Frequency Response Markets. IEEE Trans. Smart Grid 2019, 10, 5987–5999. [Google Scholar] [CrossRef]
- Trovato, V.; Sanz, I.M.; Chaudhuri, B.; Strbac, G. Advanced Control of Thermostatic Loads for Rapid Frequency Response in Great Britain. IEEE Trans. Power Syst. 2017, 32, 2106–2117. [Google Scholar] [CrossRef] [Green Version]
- Papadaskalopoulos, D.; Strbac, G. Decentralized participation of flexible demand in electricity markets—Part I: Market mechanism. IEEE Trans. Power Syst. 2013, 28, 3658–3666. [Google Scholar] [CrossRef]
- Chen, H.; Liu, M.; Cheng, Y.; Lin, S. Modeling of Unit Commitment with AC Power Flow Constraints Through Semi-Continuous Variables. IEEE Access 2019, 7, 52015–52023. [Google Scholar] [CrossRef]
- Chau, T.K.; Yu, S.S.; Fernando, T. Novel Control Strategy of DFIG Wind Turbines in Complex Power Systems for Enhancement of Primary Frequency Response and LFOD. IEEE Trans. Power Syst. 2018, 33, 1811–1823. [Google Scholar] [CrossRef]
- Trovato, V.; Bialecki, A.; Dallagi, A. Unit commitment with inertia-dependent and multispeed allocation of frequency response services. IEEE Trans. Power. Syst. 2019, 34, 1537–1548. [Google Scholar] [CrossRef]
- Teng, F.; Trovato, V.; Strbac, G. Stochastic Scheduling with Inertia-Dependent Fast Frequency Response Requirements. Ieee. Trans. Power Syst. 2016, 31, 1557–1566. [Google Scholar] [CrossRef] [Green Version]
- Bertsekas, D.P. Dynamic Programming and Optimal Control, 2nd ed.; Athena Scientific: Belmont, MA, USA, 2000. [Google Scholar]
- MacQueen, J.B. Some Methods for classification and Analysis of Multivariate Observations. Proc. Berkeley Symp. Math. Statist. Prob. 1967, 1, 281–297. [Google Scholar]
- MathWorks. k-Means Clustering. Available online: https://uk.mathworks.com/help/stats/kmeans.html#buefthh-3 (accessed on 28 October 2020).












| Term in | Description |
|---|---|
| Electricity Cost: the instantaneous cost associated to the power consumption . It depends on the area index of the TCL, since may differ from | |
| Response Revenue: the product of the availability fee awarded for FR provision and the actual FR allocation of the TCL . | |
| T tracking cost: discomfort term which penalizes quadratically, through the cost parameter , the deviations from a target temperature . | |
| I tracking cost: quadratic cost parameterized by that penalizes the deviations of from a set-point . This antisynchronization term allows to diversify the behavior of groups of TCLs that have reached the same temperature from different initial values and therefore have different values of | |
| Terminal cost function: a periodic constraint is enforced by choosing and penalizing quadratically the final value , i.e., the difference between final and initial temperature of the TCL. |
| Nuclear | CCGT | OCGT | Wind | |
|---|---|---|---|---|
| Installed capacity [MW] | 5000/1000 | 25,000/7000 | 25,000/7000 | 10,000/20,000 |
| No-load cost [£/MWh] | 0/0 | 24/7 | 32/10 | 0/0 |
| Production cost [£/MWh] | 1/1 | 50/55 | 100/105 | 1/1 |
| Production cost [£/MW2h] | 0.0009/0.0009 | 0.01/0.012 | 0.02/0.022 | 0.001/0.001 |
| Constant of inertia [s] | 6/6 | 4/4 | 4/4 | -/- |
| FR headroom | -/- | 0.1/0.1 | 0.1/0.1 | -/- |
| FR slope | -/- | 0.4/0.4 | 0.5/0.5 | -/- |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Trovato, V.; De Paola, A.; Strbac, G. Distributed Control of Clustered Populations of Thermostatic Loads in Multi-Area Systems: A Mean Field Game Approach. Energies 2020, 13, 6483. https://doi.org/10.3390/en13246483
Trovato V, De Paola A, Strbac G. Distributed Control of Clustered Populations of Thermostatic Loads in Multi-Area Systems: A Mean Field Game Approach. Energies. 2020; 13(24):6483. https://doi.org/10.3390/en13246483
Chicago/Turabian StyleTrovato, Vincenzo, Antonio De Paola, and Goran Strbac. 2020. "Distributed Control of Clustered Populations of Thermostatic Loads in Multi-Area Systems: A Mean Field Game Approach" Energies 13, no. 24: 6483. https://doi.org/10.3390/en13246483
APA StyleTrovato, V., De Paola, A., & Strbac, G. (2020). Distributed Control of Clustered Populations of Thermostatic Loads in Multi-Area Systems: A Mean Field Game Approach. Energies, 13(24), 6483. https://doi.org/10.3390/en13246483