Harmonic Overvoltage Analysis of Electric Railways in a Wide Frequency Range Based on Relative Frequency Relationships of the Vehicle–Grid Coupling System




Abstract
:1. Introduction
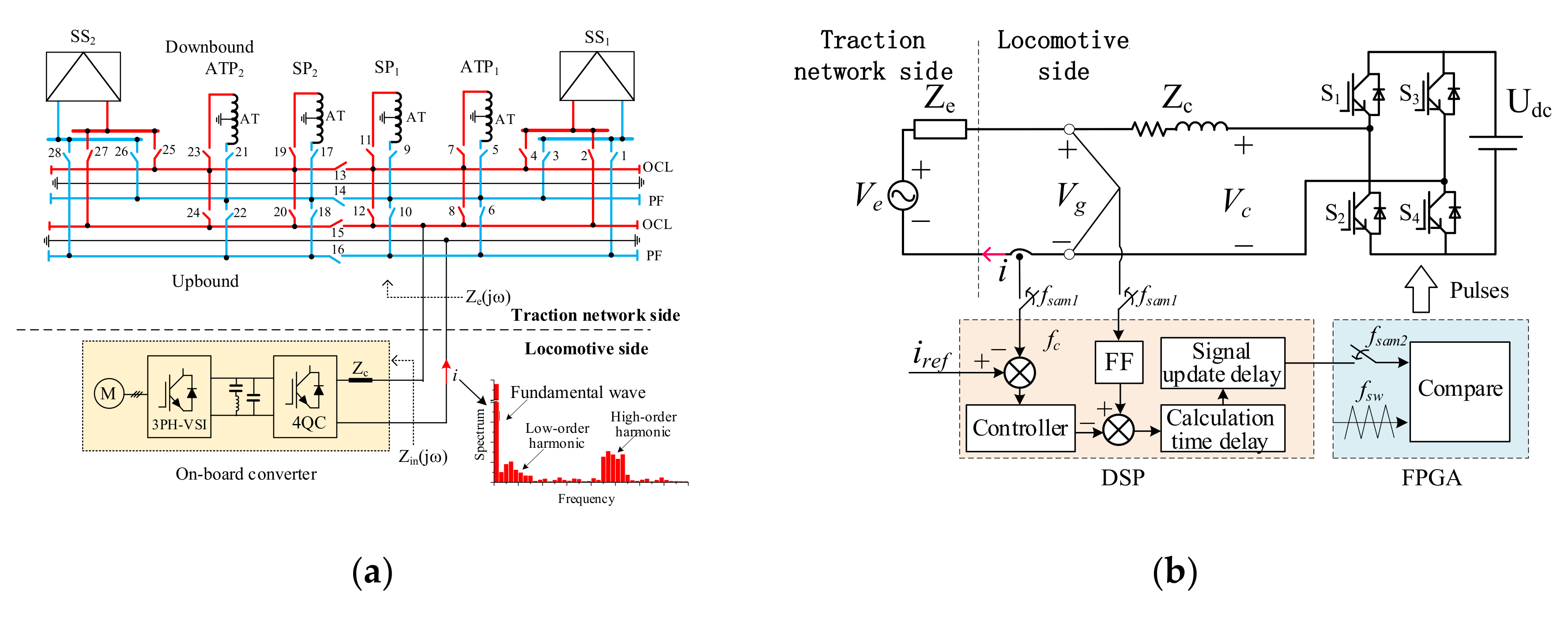
2. Vehicle–Grid Coupling System
Vehicle–Grid Coupling System Model
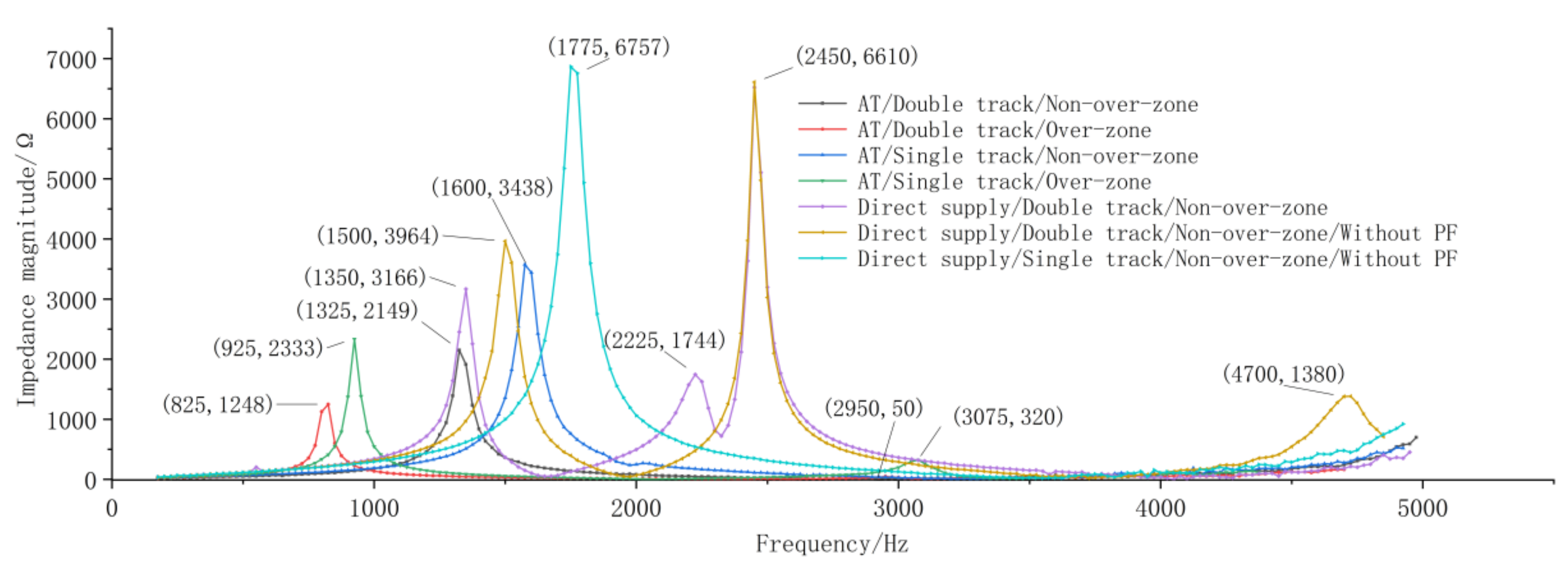
3. IFCs of TPSSs
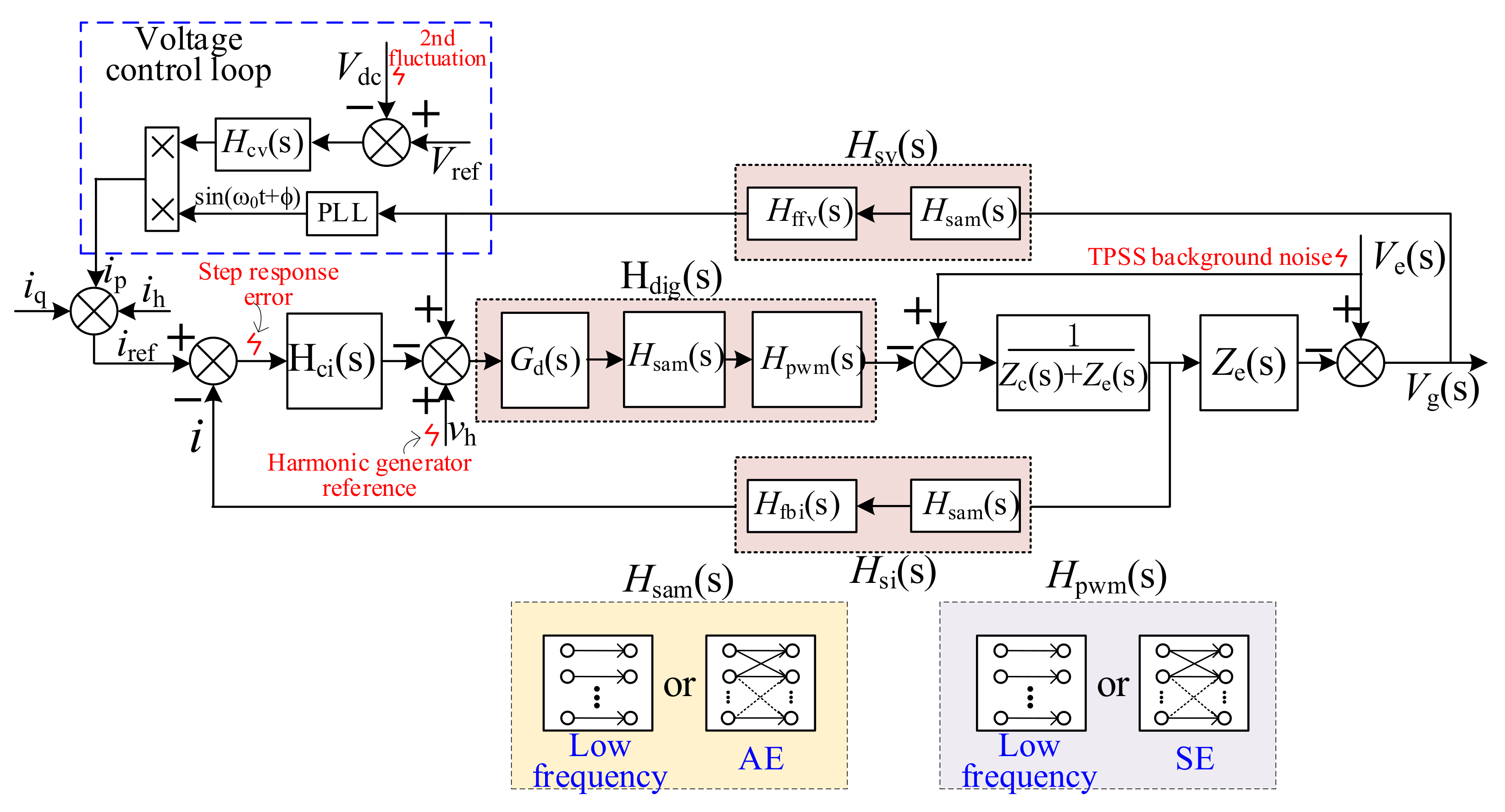
4. Control Modeling of Converters
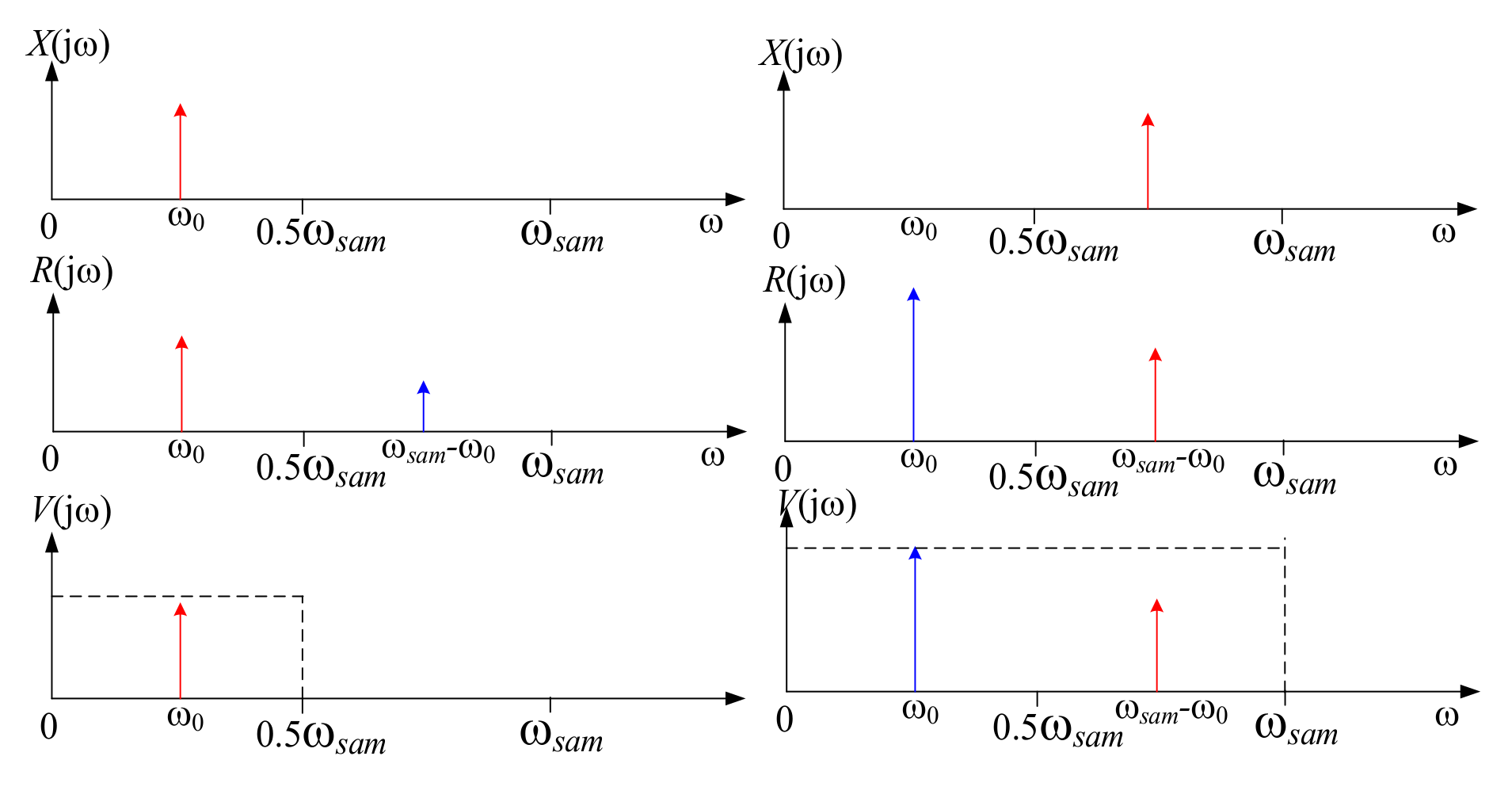
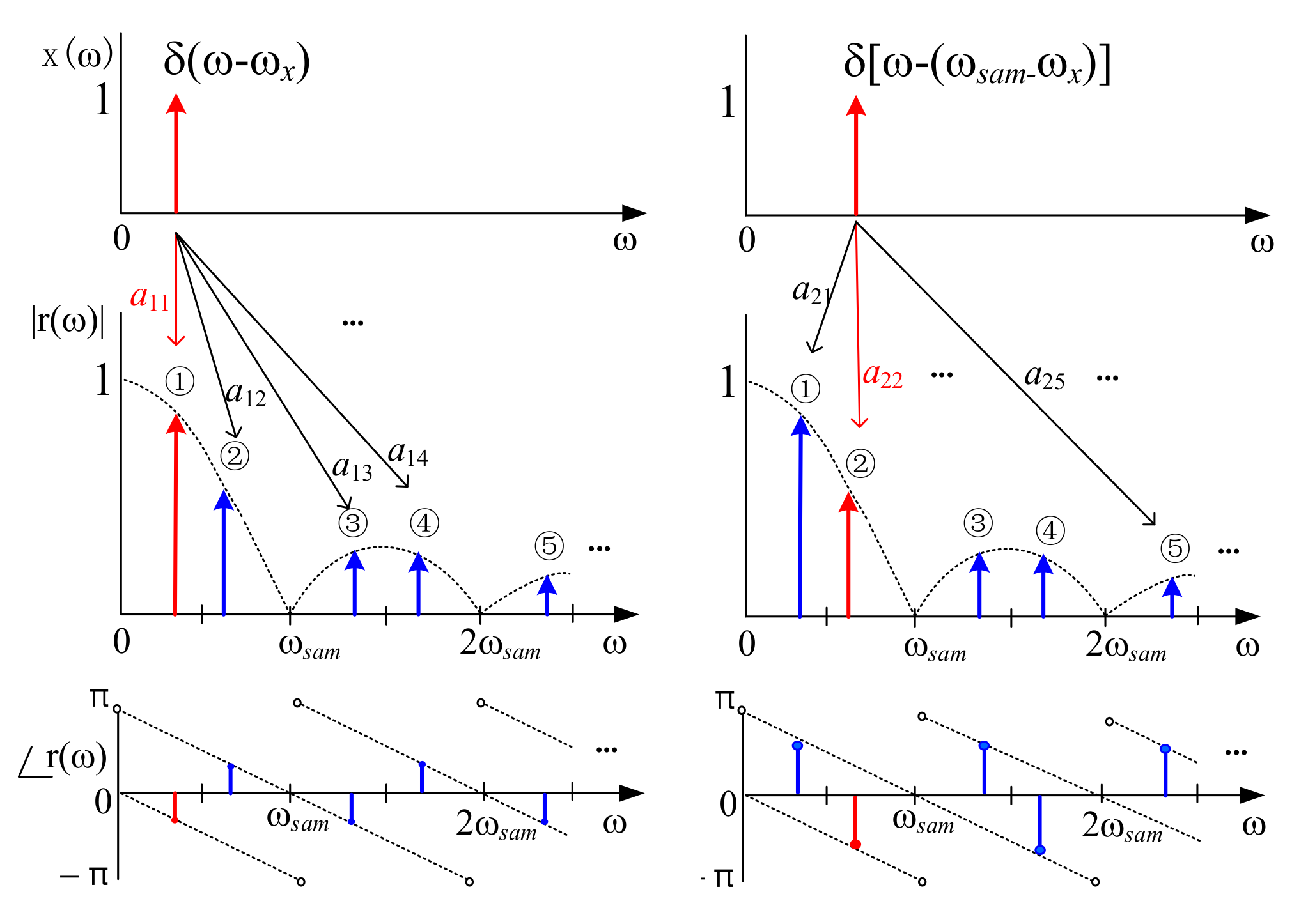
4.1. Sampling Process and Aliasing Effect
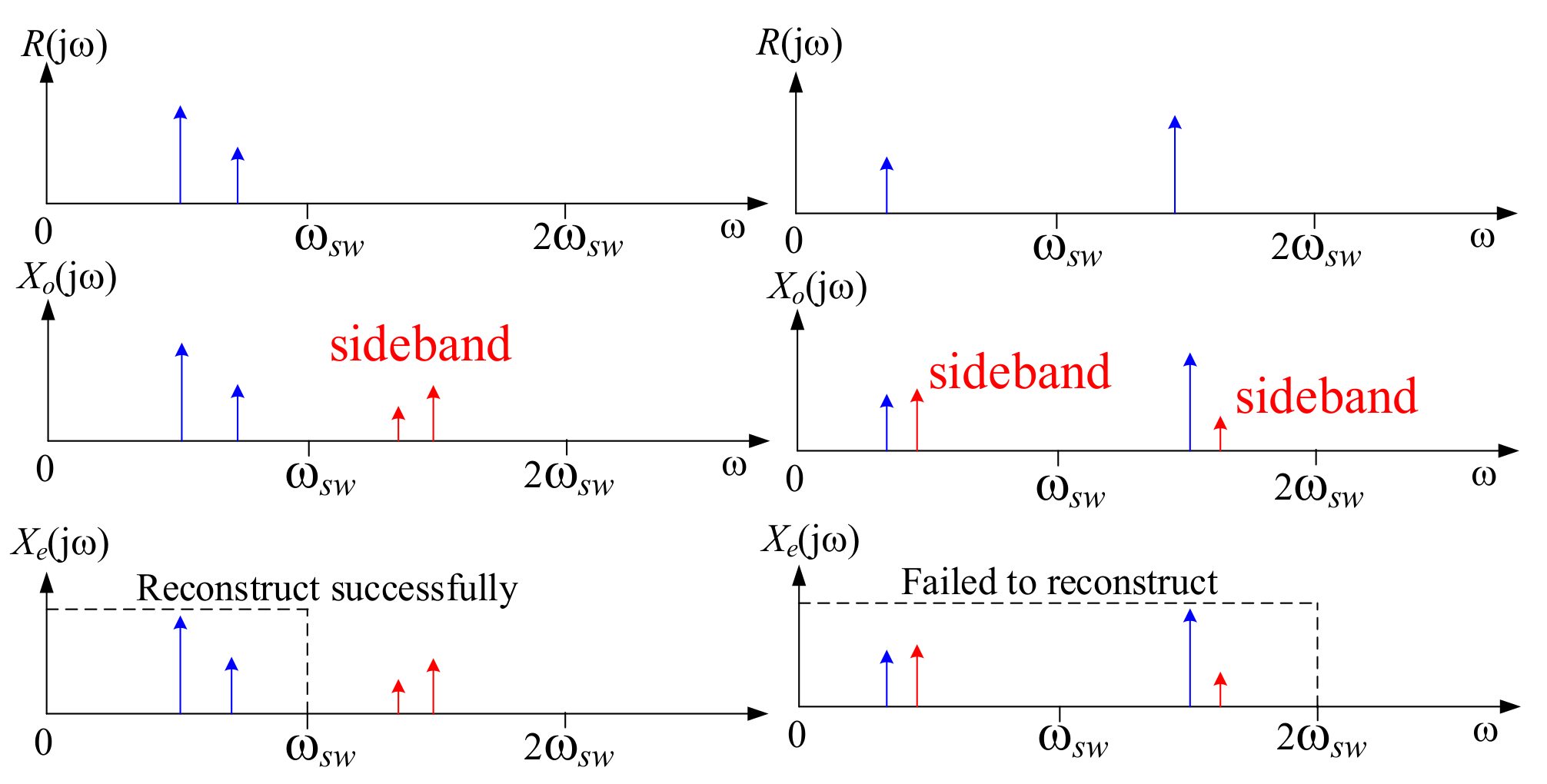
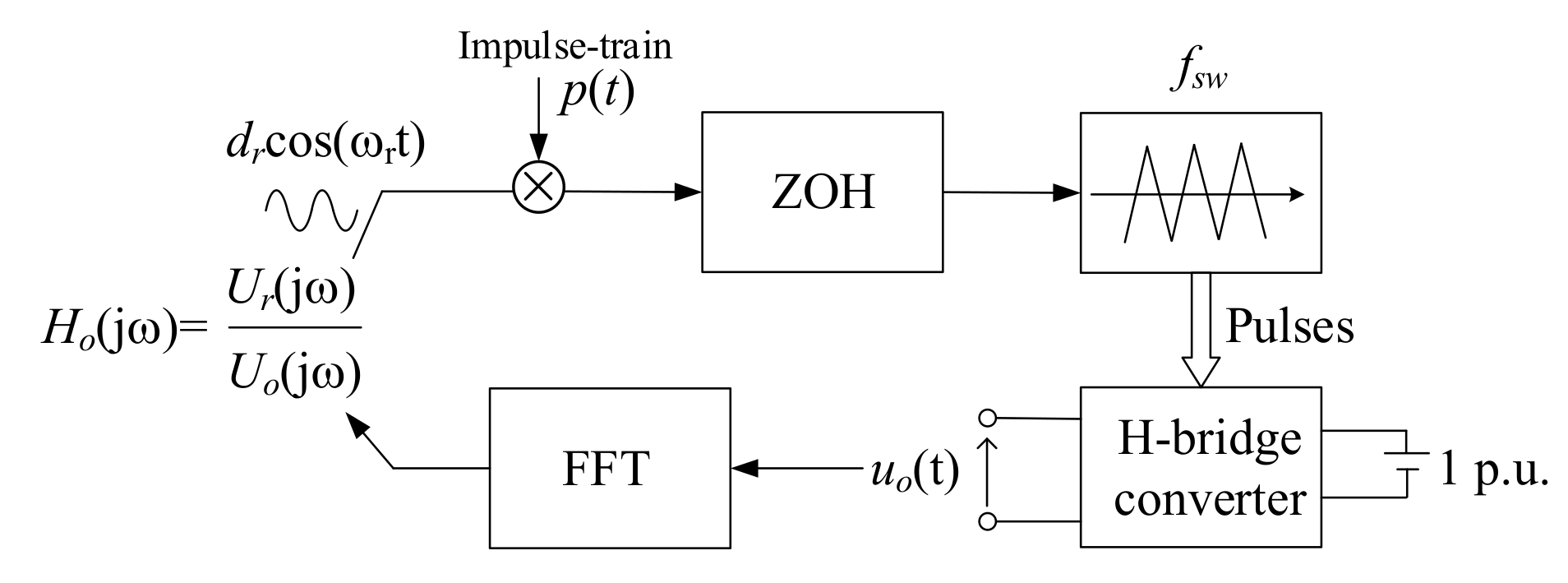
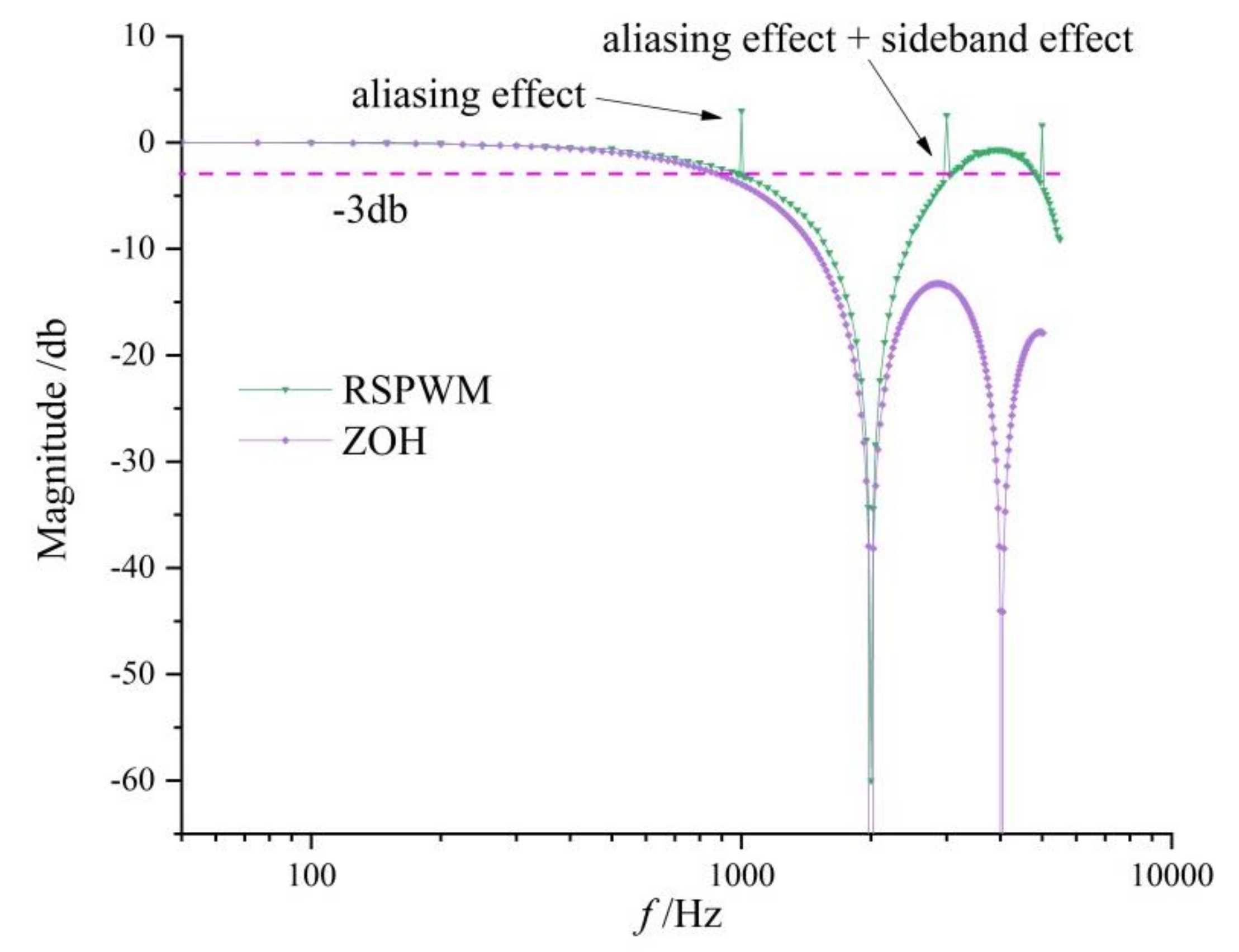
4.2. Modulation Process and Aliasing Effect
4.2.1. Natural Sampling PWM (NSPWM)
4.2.2. Regular Sampling PWM (RSPWM)
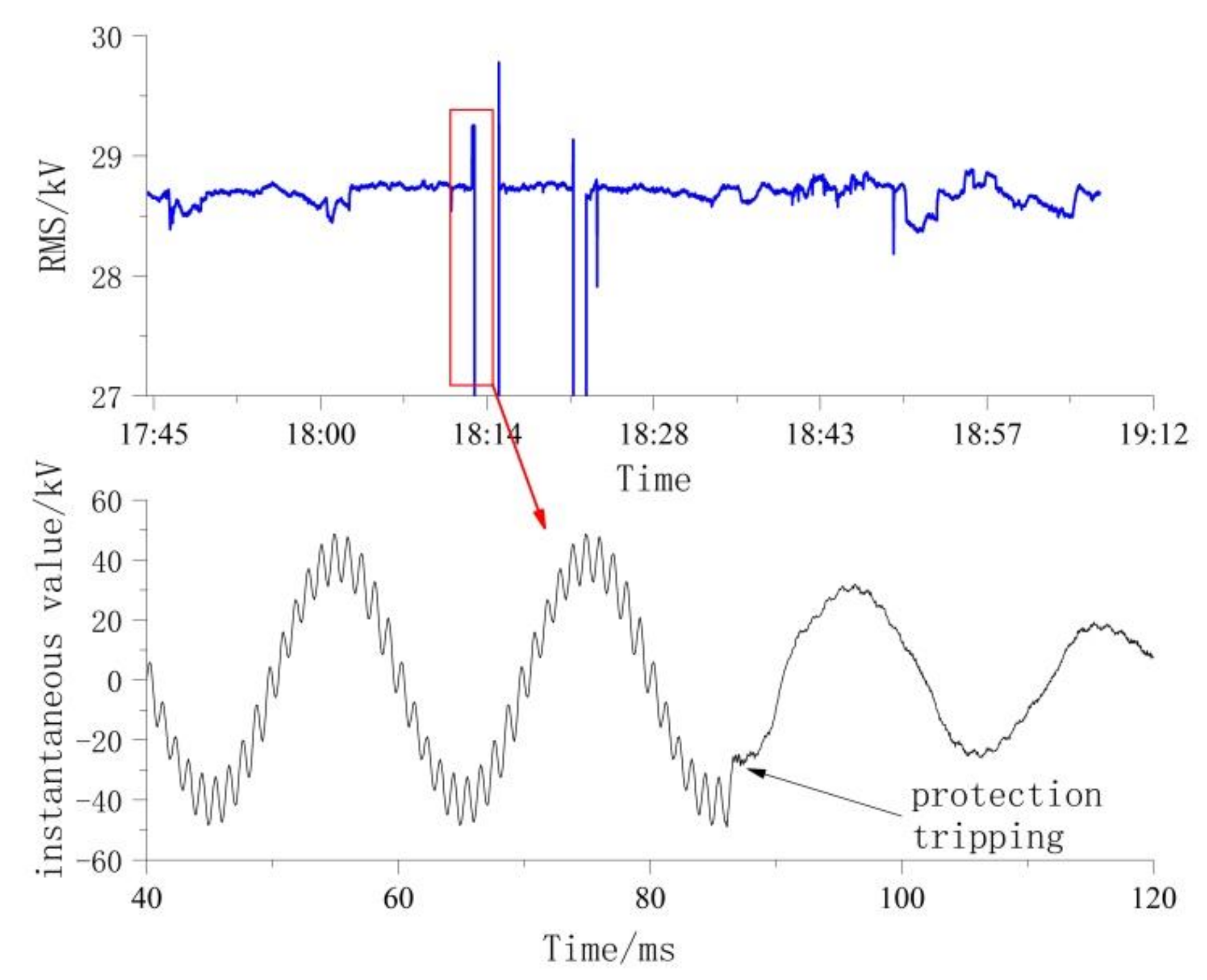
5. Harmonic Overvoltage Analysis of Traction Network in a Wide Frequency Range
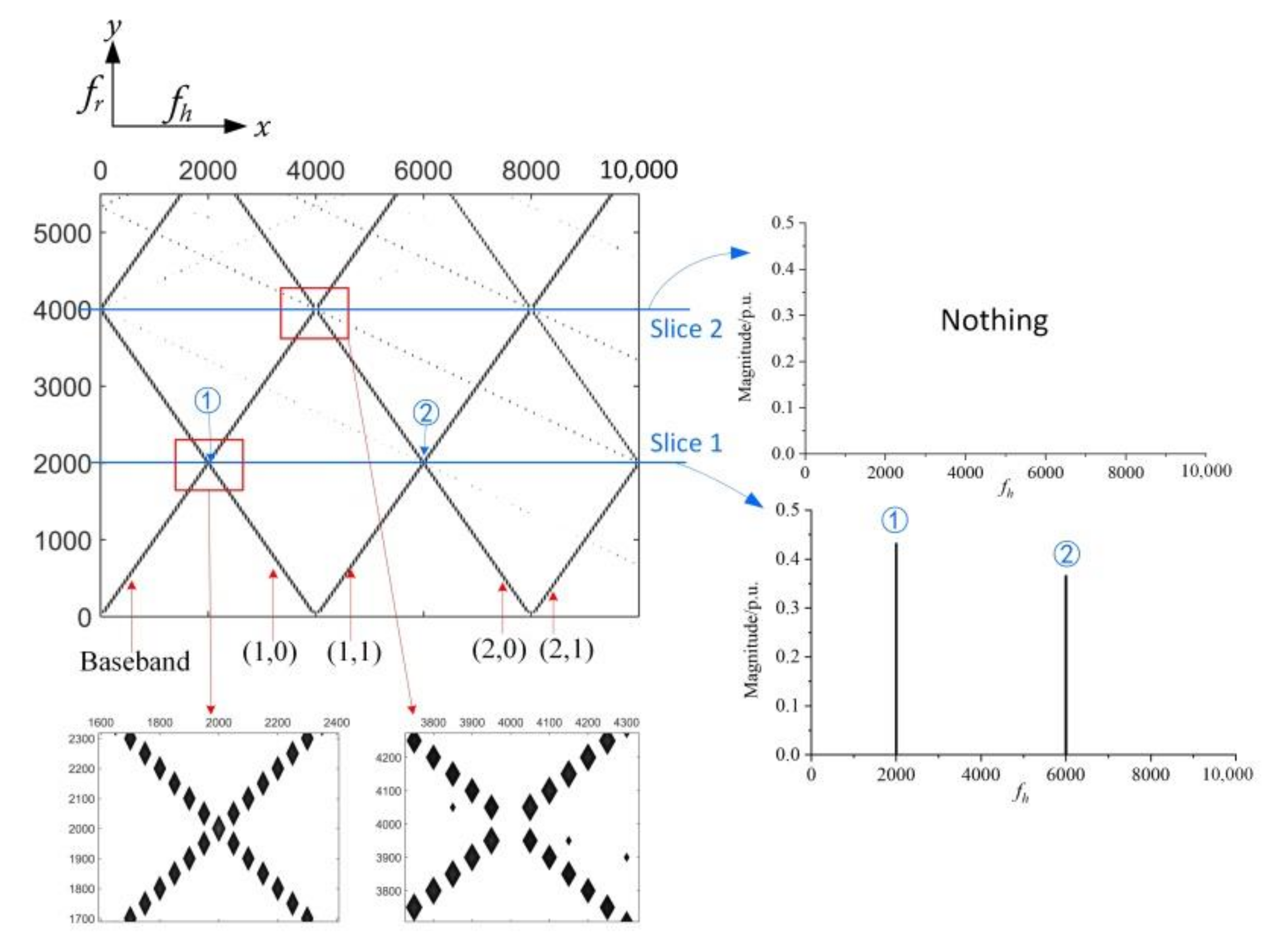
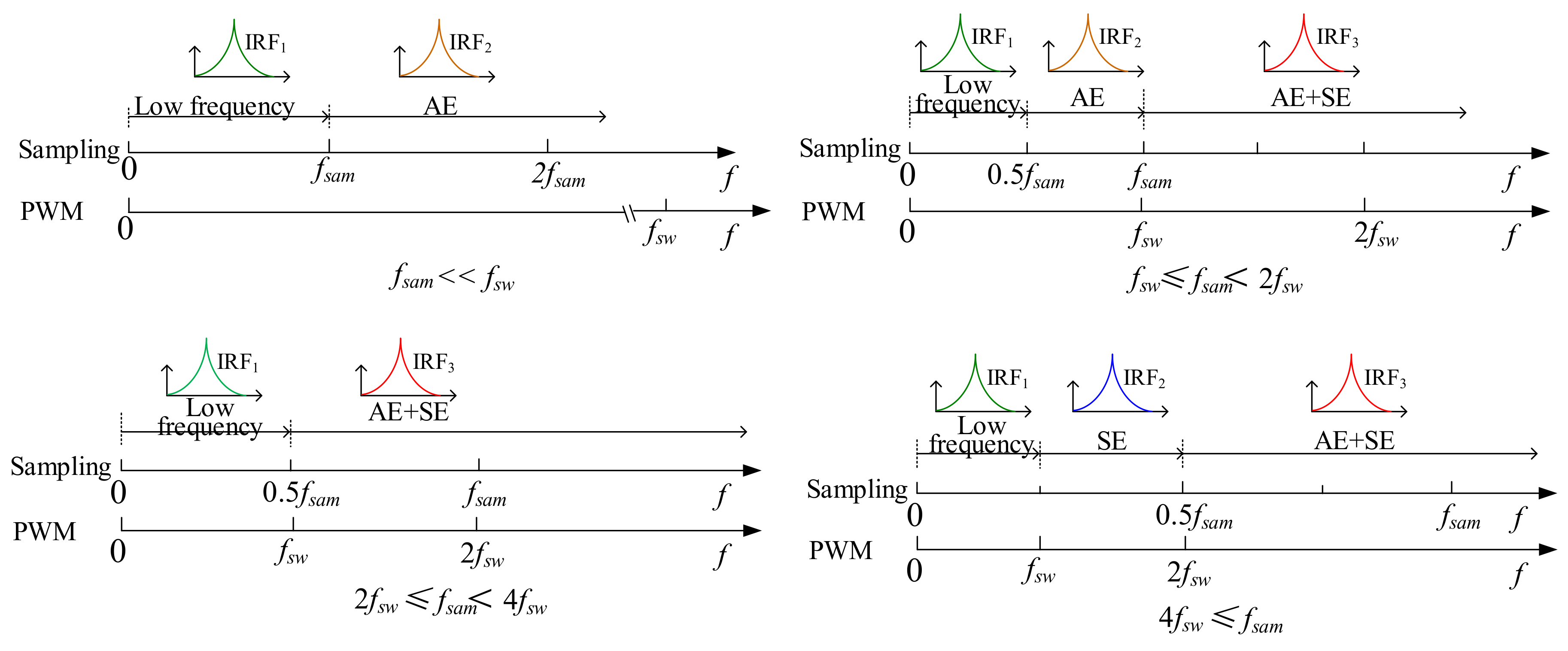
5.1. Relative Relationship among TPSS Subsection Inherent Resonant Frequency, Sampling Frequency and Switching Frequency
5.2. Low-Frequency Range Analysis
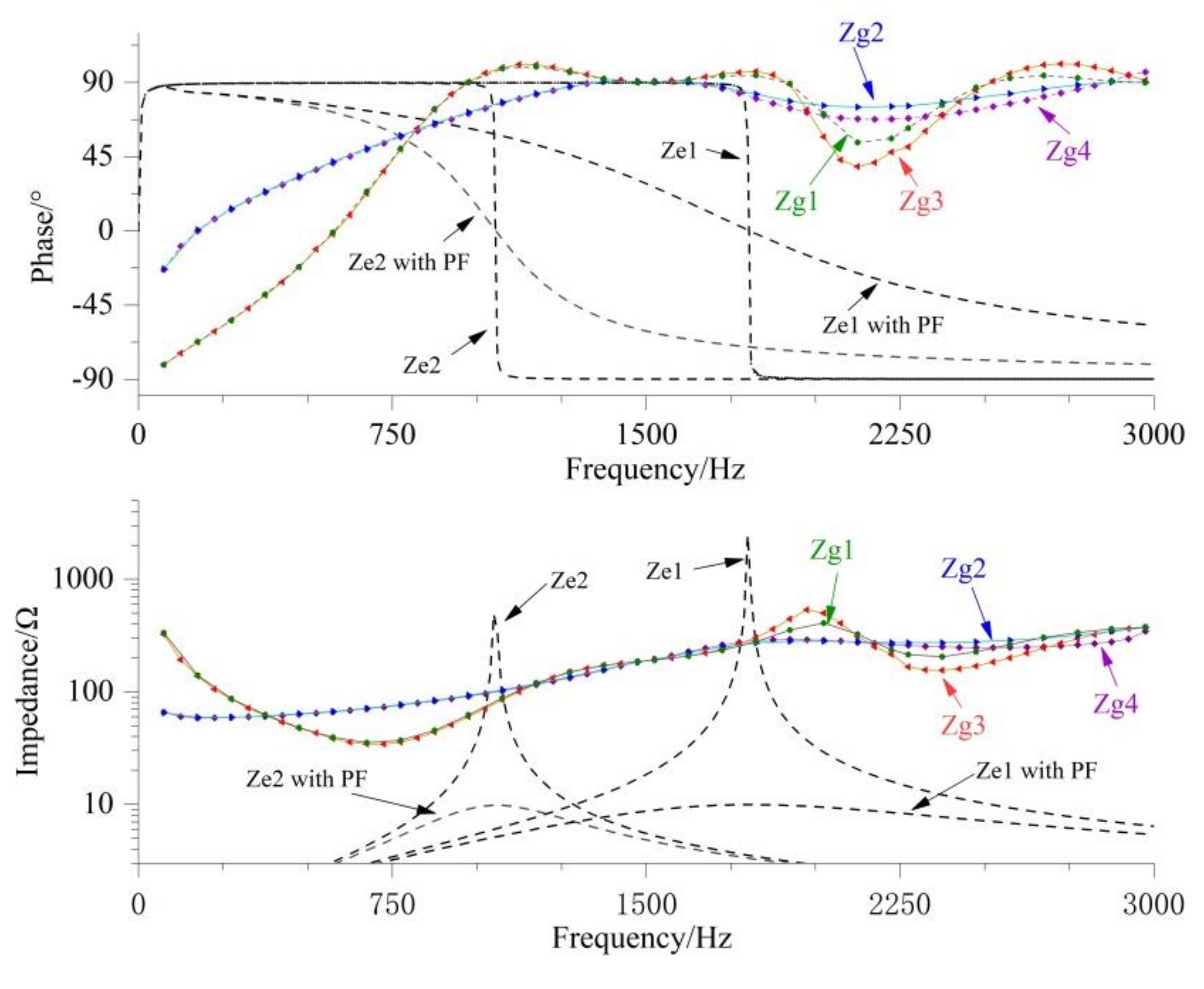
5.3. High-Frequency Range Analysis
6. Discussions
7. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Song, K.; Mingli, W.; Yang, S.; Liu, Q.; Agelidis, V.G.; Konstantinou, G. High-Order Harmonic Resonances in Traction Power Supplies: A Review Based on Railway Operational Data, Measurements, and Experience. IEEE Trans. Power Electron. 2020, 35, 2501–2518. [Google Scholar] [CrossRef]
- Rodriguez-Diaz, E.; Freijedo, F.D.; Guerrero, J.G.M.; Marrero-Sosa, J.-A.; Dujic, D. Input-Admittance Passivity Compliance for Grid-Connected Converters With an LCL Filter. IEEE Trans. Ind. Electron. 2019, 66, 1089–1097. [Google Scholar] [CrossRef] [Green Version]
- Wang, Y.; Liu, S.; Liu, J. The stability criterion and damping control strategy for grid-connected inverters and its impact on the global system. Proc. CSEE 2020, 40, 3008–3020. [Google Scholar]
- Du, C.; Du, X.; Zou, X. Impedance modeling and stability analysis of grid-connected modular multilevel converter considering frequency coupling effect. Proc. CSEE 2020, 40, 2866–2876. [Google Scholar]
- Yang, R.; Zhou, F.; Zhong, K. A Harmonic Impedance Identification Method of Traction Network Based on Data Evolution Mechanism. Energies 2020, 13, 1904. [Google Scholar] [CrossRef] [Green Version]
- Zhou, F.; Liu, F.; Yang, R.; Liu, H. Method for Estimating Harmonic Parameters Based on Measurement Data without Phase Angle. Energies 2020, 13, 879. [Google Scholar] [CrossRef] [Green Version]
- European Standard. Railway Applications—Power Supply and Rolling Stock—Technical Criteria for the Coordination between Power Supply (Substation) and Rolling Stock to Achieve Interoperability; EN 50388:2012; European Electro Technical Standardization Committee: Brussels, Belgium, 2012. [Google Scholar]
- Harnefors, L.; Finger, R.; Wang, X.; Bai, H.; Blaabjerg, F. VSC Input-Admittance Modeling and Analysis above the Nyquist Frequency for Passivity-Based Stability Assessment. IEEE Trans. Ind. Electron. 2017, 64, 6362–6370. [Google Scholar] [CrossRef]
- Freijedo, F.D.; Ferrer, M.; Dujic, D.; Ferrer-Duran, M. Multivariable High-Frequency Input-Admittance of Grid-Connected Converters: Modeling, Validation, and Implications on Stability. IEEE Trans. Ind. Electron. 2019, 66, 6505–6515. [Google Scholar] [CrossRef]
- Liu, M.; Wei, Q.; Xie, S.; Qian, Q.; Zhang, Z.; Xu, J. Multifrequency Impedance Model of Single-Phase Grid-Connected Parallel Inverters for Analysis on Circulating Resonant Current. In Proceedings of the 2019 IEEE Energy Conversion Congress and Exposition (ECCE), Baltimore, MD, USA, 29 September–3 October 2019; pp. 3655–3658. [Google Scholar]
- Yang, J.; Liu, J.; Shi, Y.; Zhao, N.; Zhang, J.; Fu, L.; Zheng, T.Q. Carrier-Based Digital PWM and Multirate Technique of a Cascaded H-Bridge Converter for Power Electronic Traction Transformers. IEEE J. Emerg. Sel. Top. Power Electron. 2019, 7, 1207–1223. [Google Scholar] [CrossRef]
- Zhou, F.; Xiong, J.; Zhong, K. Research on the phenomenon of the locomotive converter output current spectrum move based on the coupling of the train net system. Proc. CSEE 2018, 38, 1818–1825. [Google Scholar]
- Cui, H.; Feng, Y.; Lin, X. Simulation study of the harmonic resonance characteristics of the coupling system with a traction network and AC-DC-AC trains. Proc. CSEE 2014, 34, 2736–2745. [Google Scholar]
- Liu, Q.; Wu, M.; Li, J.; Yang, S. Frequency-Scanning Harmonic Generator for (Inter)harmonic Impedance Tests and Its Implementation in Actual 2 × 25 kV Railway Systems. IEEE Trans. Ind. Electron. 2020. [Google Scholar] [CrossRef]
- Liu, Q. Research on Impedance-Frequency Characteristic Test Technology of Traction Power Supply Systems. Ph.D. Thesis, Beijing Jiaotong University, Beijing, China, 2018. [Google Scholar]
- Mouton, H.D.T.; McGrath, B.; Holmes, D.G.; Wilkinson, R.H. One-Dimensional Spectral Analysis of Complex PWM Waveforms Using Superposition. IEEE Trans. Power Electron. 2014, 29, 6762–6778. [Google Scholar] [CrossRef]
- Hans, F.; Oeltze, M.; Schumacher, W. A Modified ZOH Model for Representing the Small-Signal PWM Behavior in Digital DC-AC Converter Systems. In Proceedings of the IECON 2019 45th Annual Conference of the IEEE Industrial Electronics Society, Lisbon, Portugal, 14–17 October 2019; Volume 1, pp. 1514–1520. [Google Scholar]
- Liu, Q.; Wu , M.; Li, J.; Zhang, J. Controllable harmonic generating method for harmonic impedance measurement of traction power supply systems based on phase shifted PWM. J. Power Electron. 2018, 18, 1140–1153. [Google Scholar]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| References | fsw/kHz | fsam/kHz | fresonant/kHz | Comments |
|---|---|---|---|---|
| [1] | 10 | 10 | 1 or 2 | fresonant < 0.5 fsw = 0.5 fsam |
| [2] | 15 | 15 | 3.08, 2.03 | fresonant < 0.5 fsw = 0.5 fsam |
| [3] | 20 | 10 | 1.4 | fresonant < 0.5 fsam < 0.5 fsw |
| [4,8] | 0.8 | 1.6 | 0.95 or 1.45 | fsw < fresonant < fsam Only the aliasing effect is considered. |
| [9] | 4 | 4 | 0.476 | fresonant < 0.5 fsw = 0.5 fsam |
| [11] | 10 | 10 | 1.6 | fresonant < 0.5 fsw = 0.5 fsam |
| [12] | 20 | 20 | 5 | fresonant < 0.5 fsw = 0.5 fsam |
| [13,14] | 6 | 12 | 2.7 | fresonant < 0.5 fsw = 0.25 fsam |
| [15] | 15 | 10 | 4.4 | fresonant < 0.5 fsw < fsam |
| [16] | 10 | 10 | 0.4 | fresonant < 0.5 fsw = 0.5 fsam |
| [17] | 10 | 10 | 1 | fresonant < 0.5 fsw = 0.5 fsam |
| No. | Switch Connected | Switch Disconnected | Power Supply Operation Mode |
|---|---|---|---|
| 1 | 1~12 | 13~28 | Autotransformer (AT)/Double track/Non-over-zone |
| 2 | 1~24 | 25~28 | AT/Double track/Over-zone |
| 3 | 1~5,7,9,11 | 6,8,10,12~28 | AT/Single track/Non-over-zone |
| 4 | 1~5,7,9,11,13, 14,17,19,21,23 | 6,8,10,12,15, 16,18,20,22,24~28 | AT/Single track/Over-zone |
| 5 | 1~4 | 5~28 | Direct supply/Double track/Non-over-zone |
| 6 | 2,4 | 1,3,5~28 | Direct supply/Double track/Non-over-zone/Without PF |
| 7 | 4 | 1~3,5~28 | Direct supply/Single track/Non-over-zone/Without PF |
| Case | Kci | fsam/Hz | fs/Hz | Low-Order Harmonic | fsam:fs | Stability | Overvoltage |
|---|---|---|---|---|---|---|---|
| 1 | 40 | 1500 | 6000 | N | 1:4 | N | Y |
| 2 | 5 | 1500 | 3000 | N | 1:2 | Y | N |
| 3 | 40 | 1500 | 1500 | N | 1:1 | N | Y |
| 4 | 5 | 1500 | 1500 | N | 1:1 | Y | N |
| 5 | 40 | 1500 | 750 | N | 2:1 | N | Y |
| 6 | 40 | 3000 | 1500 | N | 2:1 | Y | N |
| 7 | 40 | 3000 | 750 | 9th | 4:1 | Y | Y |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, Q.; Sun, B.; Yang, Q.; Wu, M.; He, T. Harmonic Overvoltage Analysis of Electric Railways in a Wide Frequency Range Based on Relative Frequency Relationships of the Vehicle–Grid Coupling System. Energies 2020, 13, 6672. https://doi.org/10.3390/en13246672
Liu Q, Sun B, Yang Q, Wu M, He T. Harmonic Overvoltage Analysis of Electric Railways in a Wide Frequency Range Based on Relative Frequency Relationships of the Vehicle–Grid Coupling System. Energies. 2020; 13(24):6672. https://doi.org/10.3390/en13246672
Chicago/Turabian StyleLiu, Qiujiang, Binghan Sun, Qinyao Yang, Mingli Wu, and Tingting He. 2020. "Harmonic Overvoltage Analysis of Electric Railways in a Wide Frequency Range Based on Relative Frequency Relationships of the Vehicle–Grid Coupling System" Energies 13, no. 24: 6672. https://doi.org/10.3390/en13246672
APA StyleLiu, Q., Sun, B., Yang, Q., Wu, M., & He, T. (2020). Harmonic Overvoltage Analysis of Electric Railways in a Wide Frequency Range Based on Relative Frequency Relationships of the Vehicle–Grid Coupling System. Energies, 13(24), 6672. https://doi.org/10.3390/en13246672