Free and Forced Vibration Analysis of H-type and Hybrid Vertical-Axis Wind Turbines




Abstract
:1. Introduction
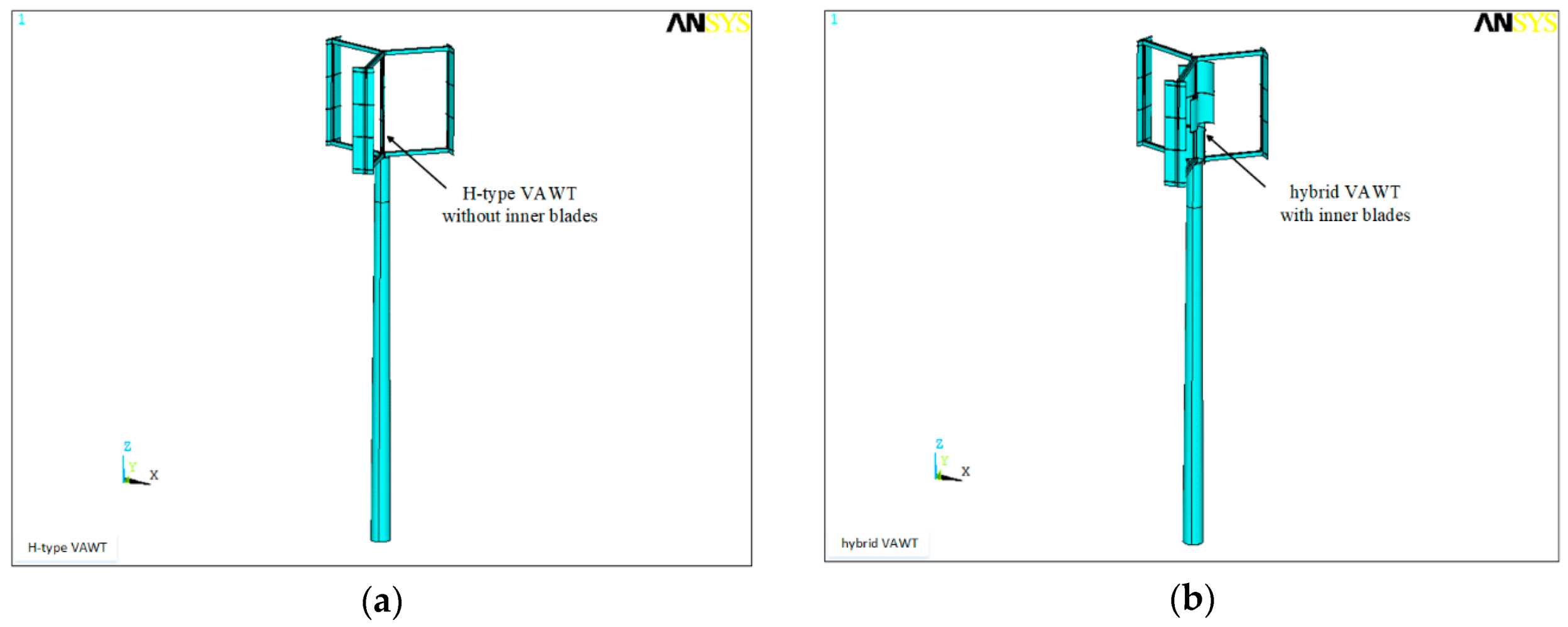
2. Description of VAWTs
3. Free Vibration Analysis of the Two VAWTs
3.1. SDOF Model
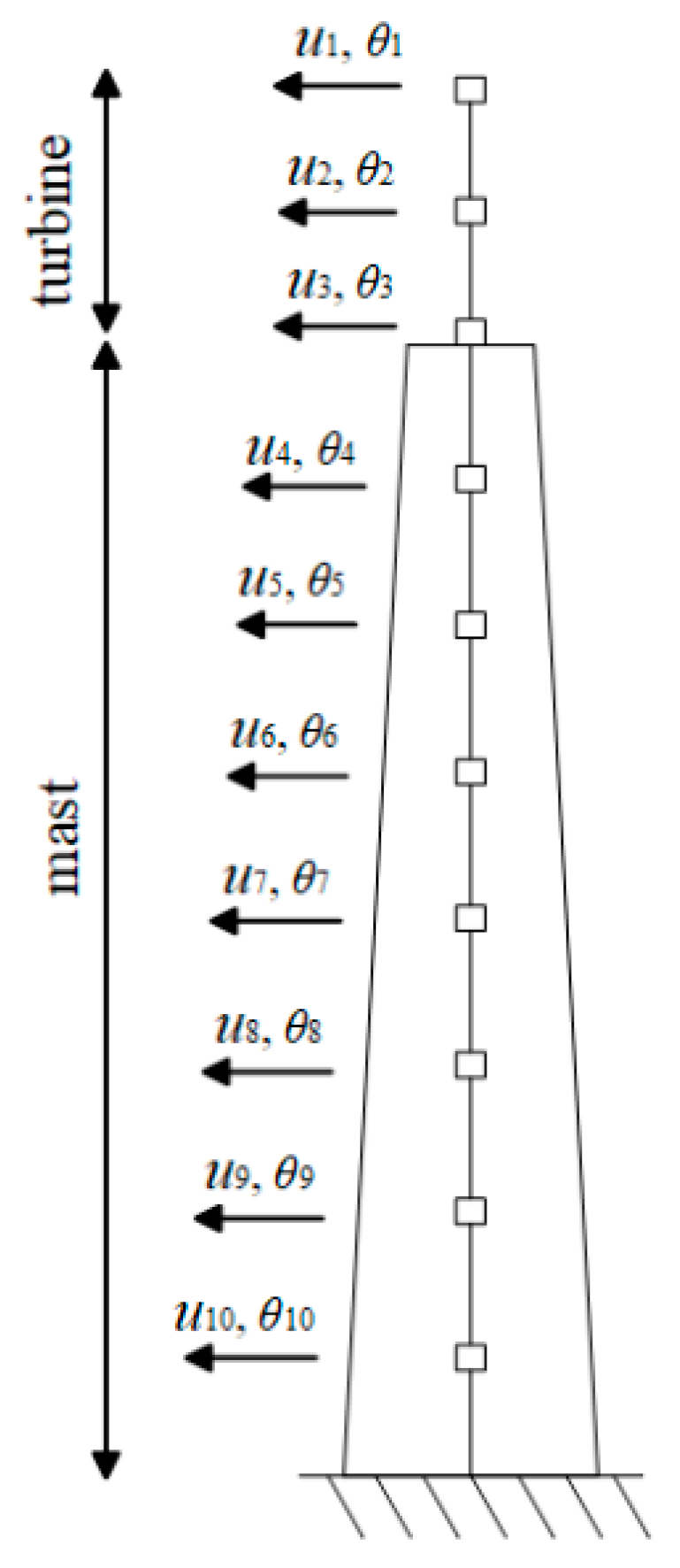
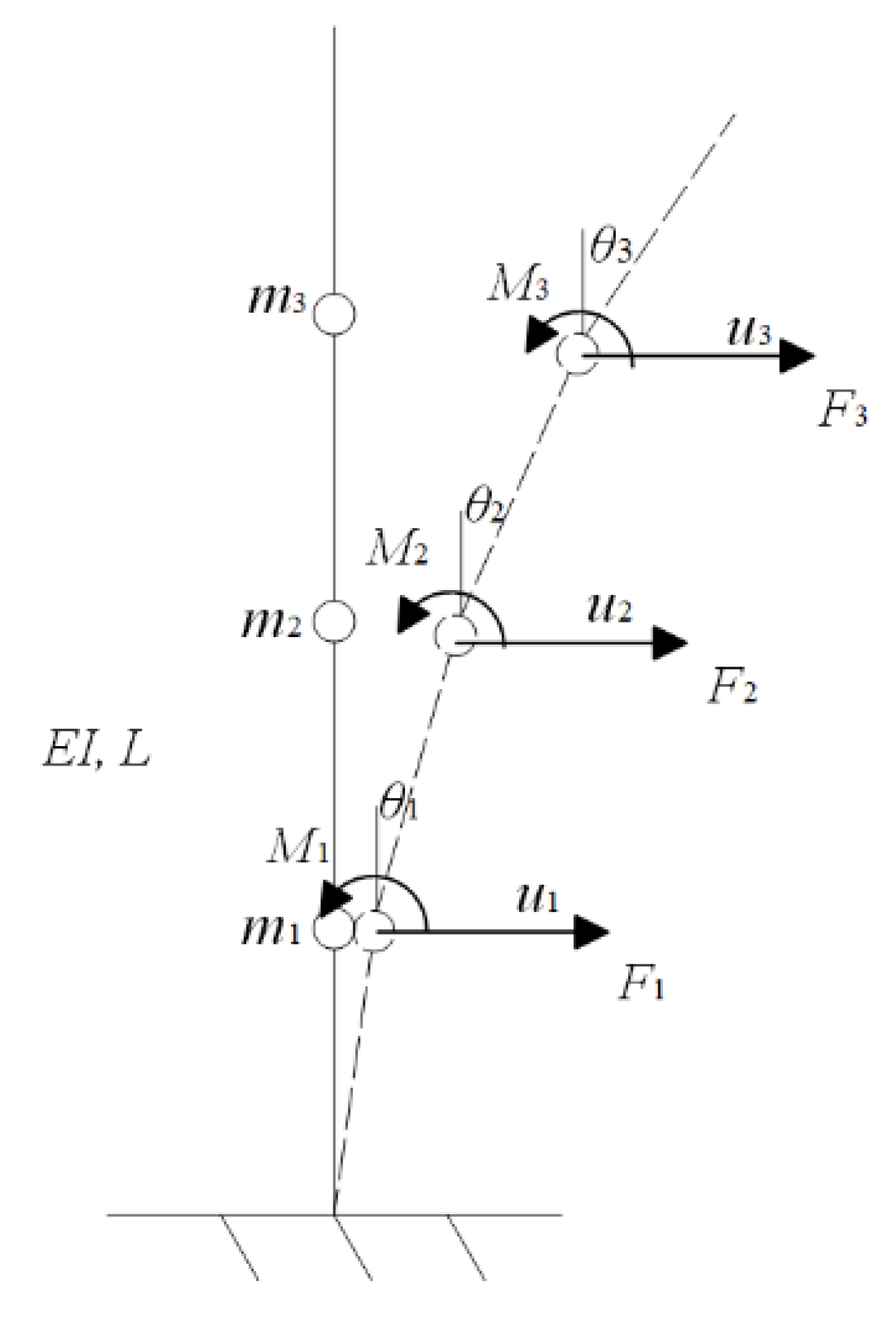
3.2. MDOF Model
3.3. BEM
3.4. SEM
4. Forced Vibration Analysis of the Two VAWTs
4.1. Harmonic Response Analysis
4.2. Forced Vibration Analysis
4.3. Time-Varying Aerodynamic Loads on the Two VAWTs
5. Numerical Results and Discussions
5.1. SDOF Results
5.2. MDOF Results
5.3. BEM Results
5.3.1. Free Vibration
5.3.2. Forced Vibration Results
5.4. SEM Results
5.4.1. Free Vibration Results
5.4.2. Forced vibration results
5.5. Aerodynamic Excitation Frequency Analysis
5.6. Power Efficiency Analysis
6. Conclusions
- (1)
- Differences between natural frequencies of the SDOF model of the H-type and hybrid VAWTs and the first natural frequencies of their MDOF model range from 3.12% to 3.67% and from 3.02% to 3.53%, respectively, when the mast height varies from 1 to 4 m, which means that the SDOF model is a useful model to analyze the first natural frequencies of the two VAWTs.
- (2)
- Differences between the first three natural frequencies of the MDOF model of the H-type and hybrid VAWTs and those of their BEM range from 0.13% to 3.54% and from 0.12% to 3.92%, respectively, when the mast height varies from 1 to 4 m, which means that the MDOF model is a useful and reasonably simplified model to analyze free vibrations of the two VAWTs.
- (3)
- Differences between the first three natural frequencies of the BEM of the H-type and hybrid VAWTs and corresponding natural frequencies of their SEMs range from 1.39% to 4.03% and from 1.61% to 4.30%, respectively, when the mast height varies from 1 and 4 m, which means that the BEM is a useful and reasonably simplified model to analyze free vibrations of the two VAWTs.
- (4)
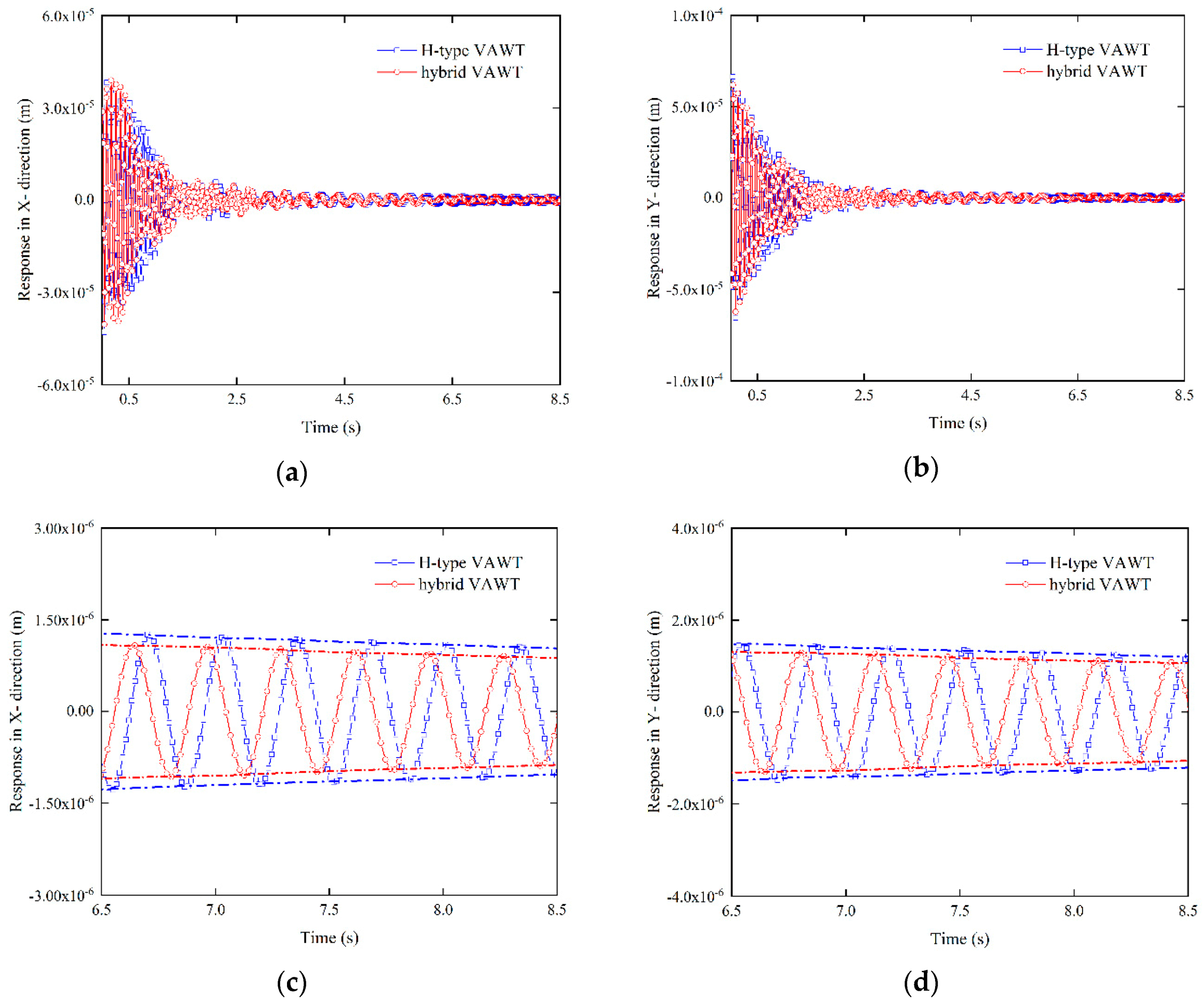
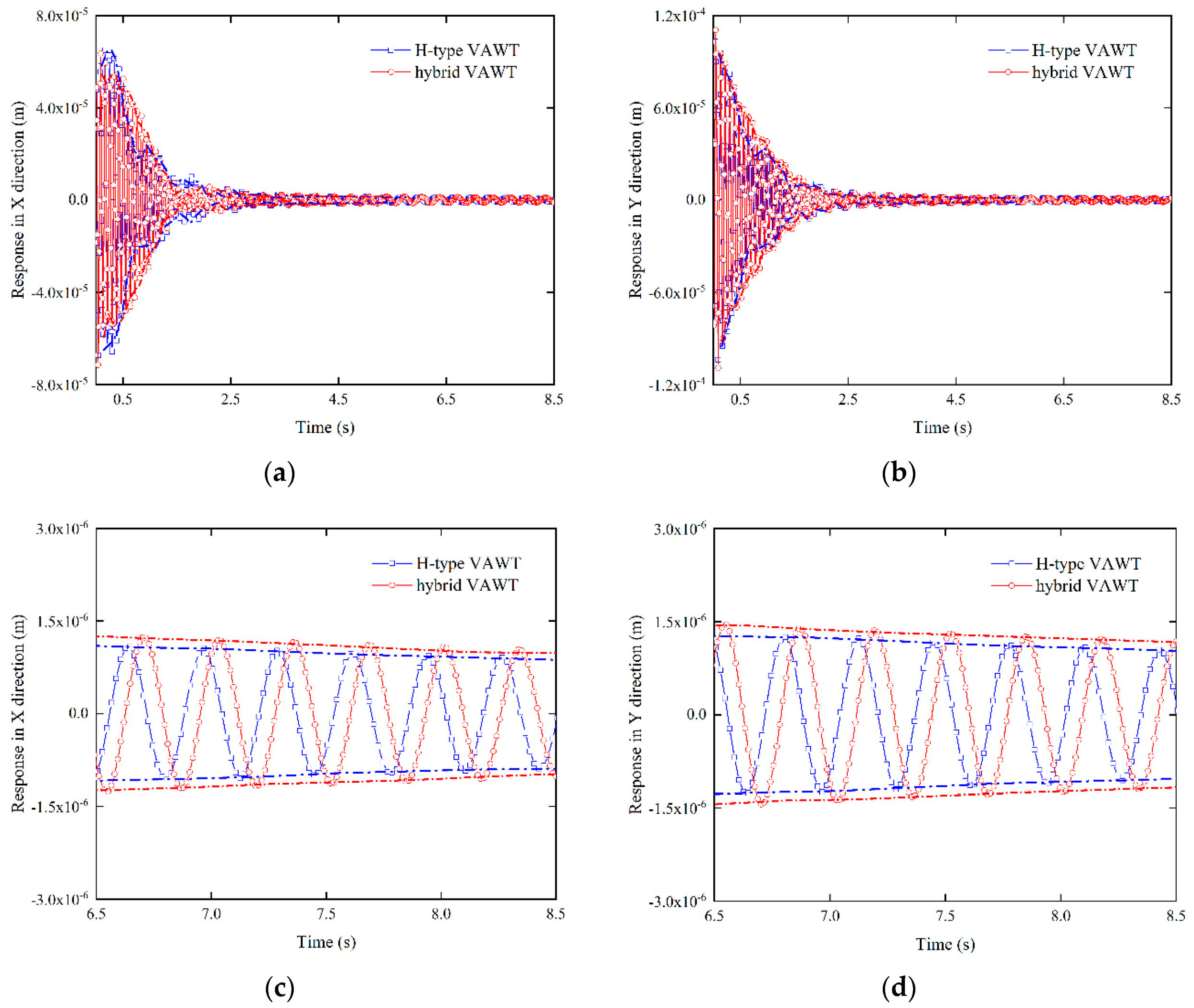
- Based on their SEMs, for the 1 m-mast height, the first natural frequency of the H-type VAWT is 3.69% smaller than that of the hybrid VAWT. For the 4m-mast height, the first natural frequency of the H-type VAWT is 1.05% larger than that of the hybrid VAWT. For the 1 m-mast height, steady-state forced response amplitudes of the H-type VAWT are 23.8% and 20.5% larger than those of the hybrid VAWT in X- and Y-directions, respectively. For the 4 m-mast height, steady-state forced response amplitudes of the H-type VAWT are 22.8% and 24.3% smaller than those of the hybrid VAWT in X- and Y-directions, respectively. For the 1 m-mast H-type and hybrid VAWTs, the maximum steady-state response amplitudes in the X-direction are 17.4% and 20.1% smaller than those the Y-direction, respectively. For the 4m-mast H-type and hybrid VAWTs, the maximum steady-state response amplitudes in the X-direction are 13.8% and 15.3% smaller than those in the Y-direction, respectively.
- (5)
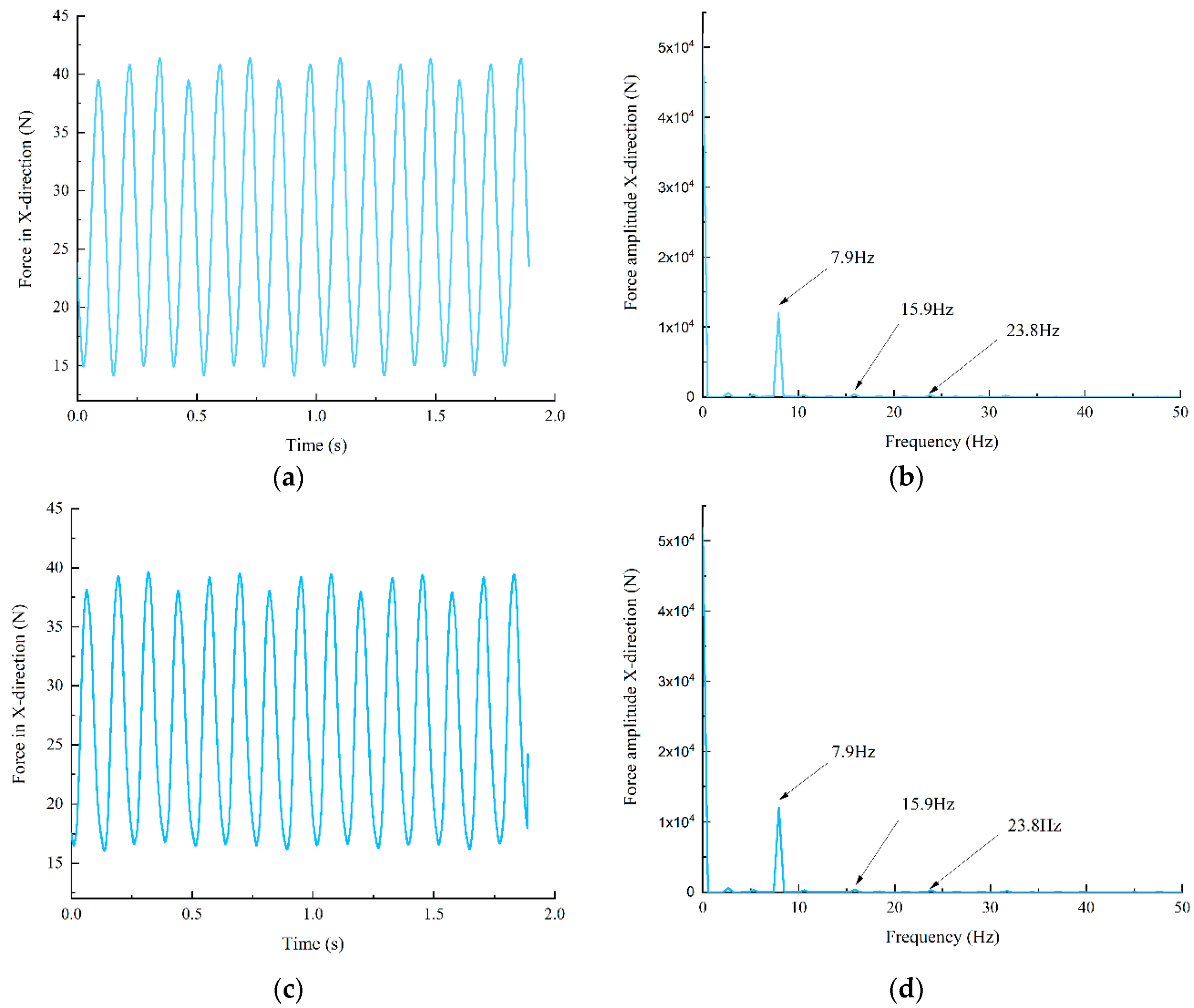
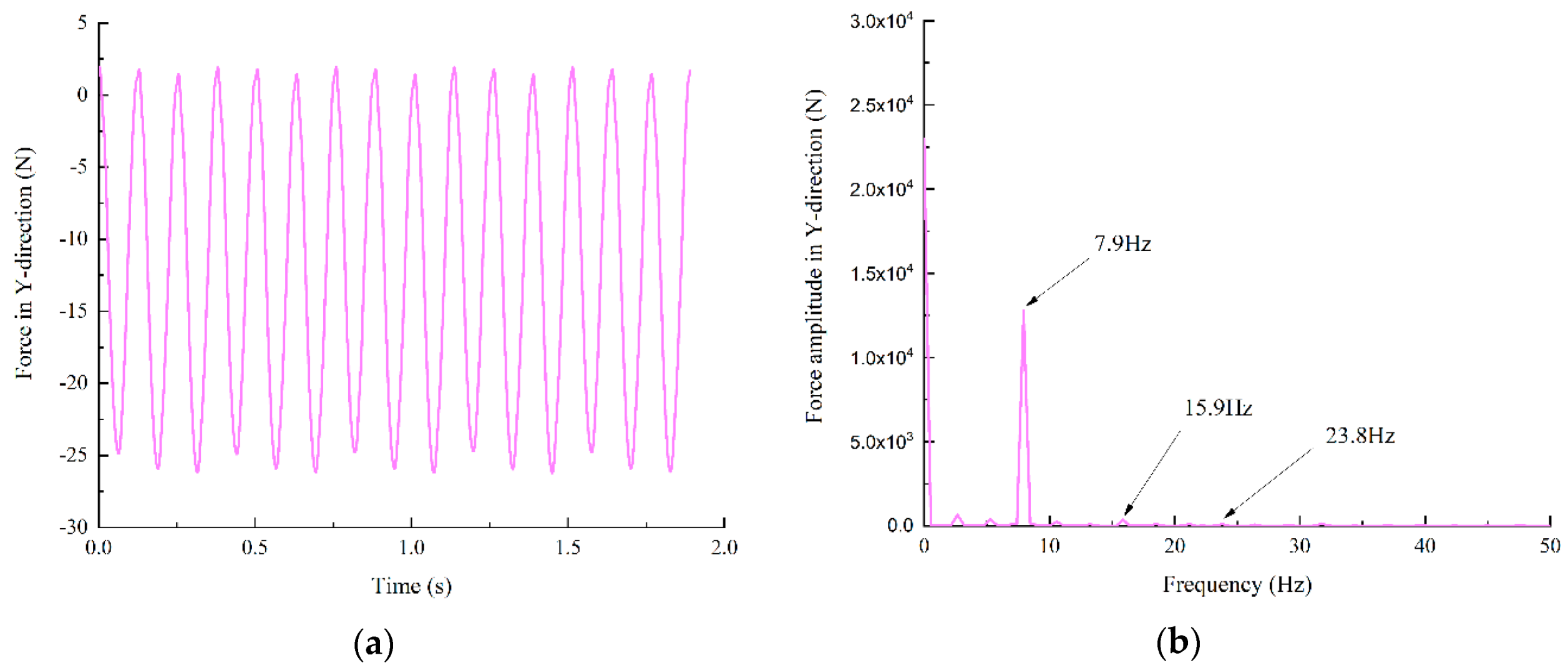
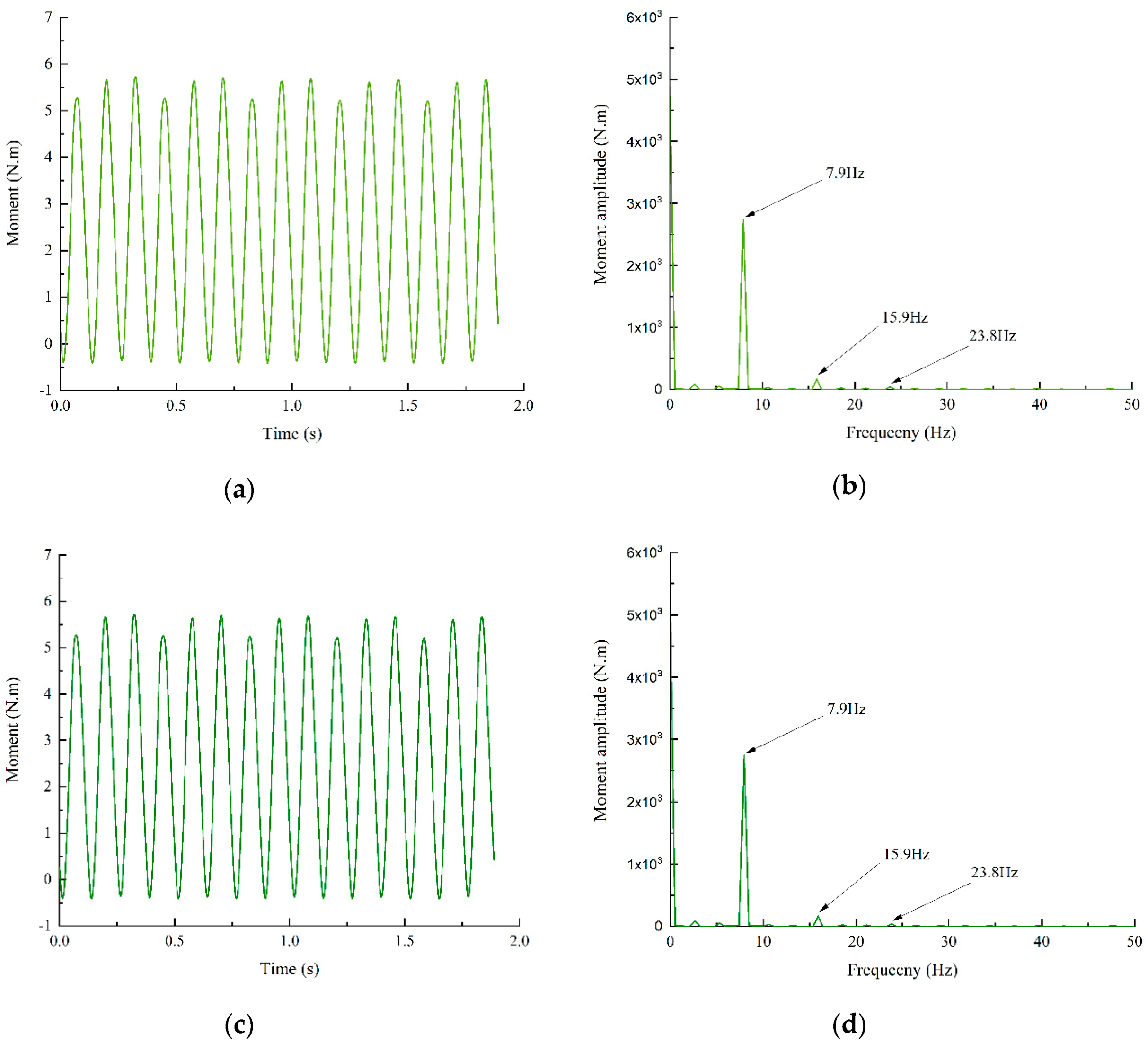
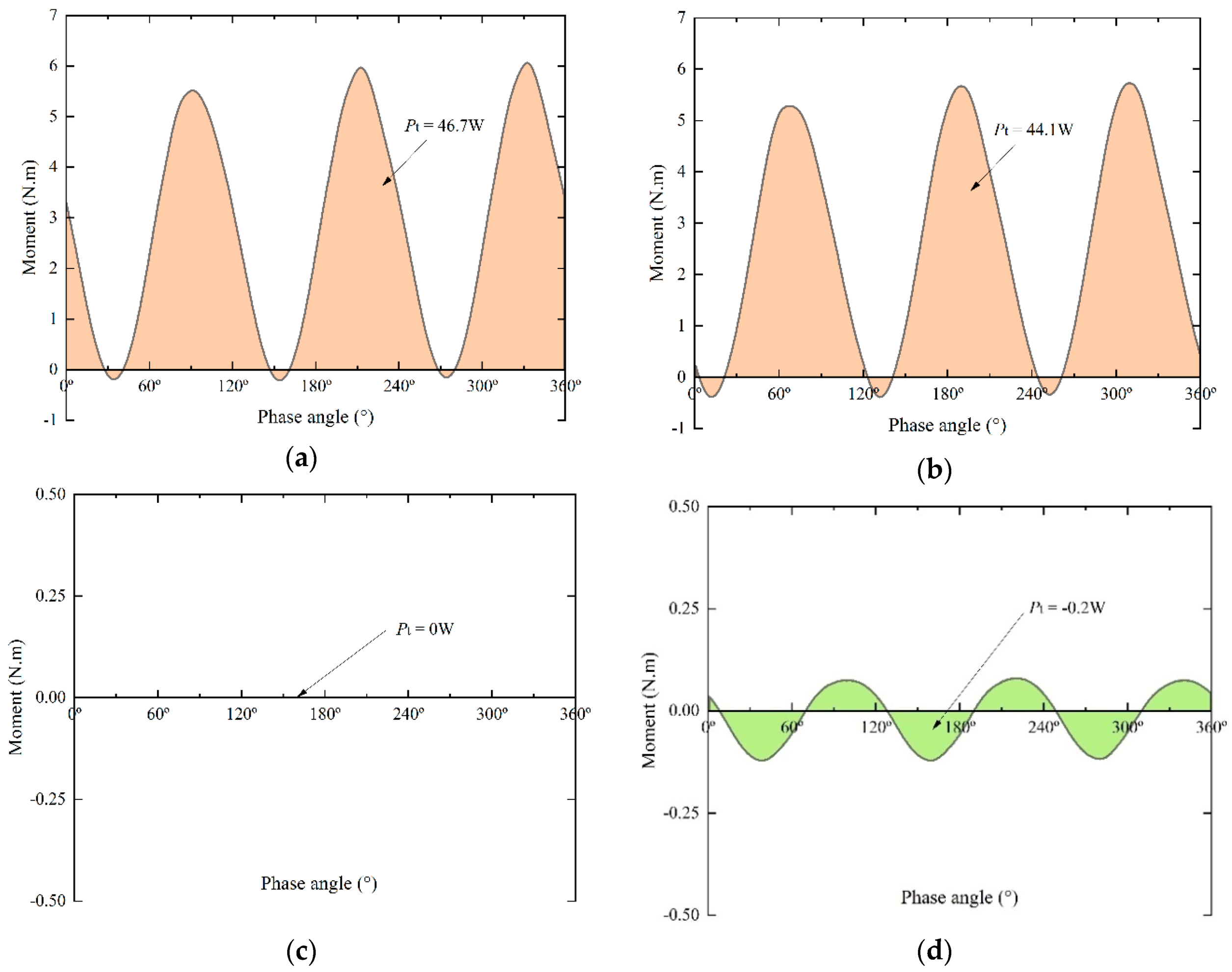
- Aerodynamic forces and moments on blades of the two VAWTs are periodic. Outer blades of the hybrid VAWT play a dominant role in its power generation process. While inner blades of the hybrid VAWT have a minimal effect on its power generation, they can significantly enhance its self-starting capability.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- American Wind Energy Association (AWEA). Wind Powers America Annual Report; American Wind Energy Association (AWEA): Washington, DC, USA, 2019.
- Wilburn, D.R. Wind Energy in the United States and Materials Required for the Land-Based Wind Turbine Industry from 2010 through 2030; US Department of the Interior: US Geological Survey: Washington, DC, USA, 2011.
- Bianchini, A.; Balduzzi, F.; Di Rosa, D.; Ferrara, G. On the use of Gurney Flaps for the aerodynamic performance augmentation of Darrieus wind turbines. Energy Convers. Manag. 2019, 184, 402–415. [Google Scholar]
- Han, H.; Liu, L.; Cao, D. Dynamic modeling for rotating composite Timoshenko beam and analysis on its bending-torsion coupled vibration. Appl. Math. Modell. 2020, 78, 773–791. [Google Scholar]
- Castelli, M.R.; Giulia, S.; Ernesto, B. Numerical analysis of the influence of airfoil asymmetry on VAWT performance. World Acad. Sci. Eng. Technol. 2012, 61, 312–321. [Google Scholar]
- Bianchini, A.; Balduzzi, F.; Ferrara, G.; Ferrari, L. Virtual incidence effect on rotating airfoils in Darrieus wind turbines. Energy Convers. Manag. 2016, 111, 329–338. [Google Scholar]
- Liu, K.; Yu, M.; Zhu, W. Enhancing wind energy harvesting performance of vertical axis wind turbines with a new hybrid design: A fluid-Structure interaction study. Renew. Energy 2019, 140, 912–927. [Google Scholar]
- Zanforlin, S.; Nishino, T. Fluid dynamic mechanisms of enhanced power generation by closely spaced vertical axis wind turbines. Renew. Energy 2016, 99, 1213–1226. [Google Scholar]
- Abdalrahman, G.; Melek, W.; Lien, F.-S. Pitch angle control for a small-scale Darrieus vertical axis wind turbine with straight blades (H-Type VAWT). Renew. Energy 2017, 114, 1353–1362. [Google Scholar]
- Chen, W.-H.; Chen, C.-Y.; Huang, C.-Y.; Hwang, C.-J. Power output analysis and optimization of two straight-bladed vertical-axis wind turbines. Appl. Energy 2017, 185, 223–232. [Google Scholar]
- Joo, S.; Choi, H.; Lee, J. Aerodynamic characteristics of two-bladed H-Darrieus at various solidities and rotating speeds. Energy 2015, 90, 439–451. [Google Scholar]
- Bhargav, M.; Kishore, V.R.; Laxman, V. Influence of fluctuating wind conditions on vertical axis wind turbine using a three dimensional CFD model. J. Wind Eng. Ind. Aerodyn. 2016, 158, 98–108. [Google Scholar]
- Dessoky, A.; Lutz, T.; Bangga, G.; Krämer, E. Computational studies on Darrieus VAWT noise mechanisms employing a high order DDES model. Renew. Energy 2019, 143, 404–425. [Google Scholar] [CrossRef]
- Lositaño, I.C.M.; Danao, L.A.M. Steady wind performance of a 5 kW three-Bladed H-Rotor Darrieus Vertical Axis Wind Turbine (VAWT) with cambered tubercle leading edge (TLE) blades. Energy 2019, 175, 278–291. [Google Scholar] [CrossRef]
- Molina, A.C.; De Troyer, T.; Massai, T.; Vergaerde, A.; Runacres, M.C.; Bartoli, G. Effect of turbulence on the performance of VAWTs: An experimental study in two different wind tunnels. J. Wind Eng. Ind. Aerodyn. 2019, 193, 103969. [Google Scholar] [CrossRef]
- Vergaerde, A.; De Troyer, T.; Molina, A.C.; Standaert, L.; Runacres, M. Design, manufacturing and validation of a vertical-axis wind turbine setup for wind tunnel tests. J. Wind Eng. Ind. Aerodyn. 2019, 193, 103949. [Google Scholar] [CrossRef]
- Peng, H.; Lam, H.; Liu, H. Power performance assessment of H-Rotor vertical axis wind turbines with different aspect ratios in turbulent flows via experiments. Energy 2019, 173, 121–132. [Google Scholar] [CrossRef]
- Benner, B.M.; Carlson, D.W.; Seyed-Aghazadeh, B.; Modarres-Sadeghi, Y. Vortex-Induced Vibration of symmetric airfoils used in Vertical-Axis Wind Turbines. J. Fluids Struct. 2019, 91, 102577. [Google Scholar] [CrossRef]
- Buchner, A.; Lohry, M.W.; Martinelli, L.; Soria, J.; Smits, A.J. Dynamic stall in vertical axis wind turbines: Comparing experiments and computations. J. Wind Eng. Ind. Aerodyn. 2015, 146, 163–171. [Google Scholar] [CrossRef]
- Guo, Y.; Li, X.; Sun, L.; Gao, Y.; Gao, Z.; Chen, L. Aerodynamic analysis of a step adjustment method for blade pitch of a VAWT. J. Wind Eng. Ind. Aerodyn. 2019, 188, 90–101. [Google Scholar] [CrossRef]
- Chen, C.-C.; Kuo, C.-H. Effects of pitch angle and blade camber on flow characteristics and performance of small-size Darrieus VAWT. J. Vis. 2013, 16, 65–74. [Google Scholar] [CrossRef]
- Sengupta, A.; Biswas, A.; Gupta, R. Comparison of low wind speed aerodynamics of unsymmetrical blade H-Darrieus rotors-blade camber and curvature signatures for performance improvement. Renew. Energy 2019, 139, 1412–1427. [Google Scholar] [CrossRef]
- Yao, Y.; Tang, Z.; Wang, X. Design based on a parametric analysis of a drag driven VAWT with a tower cowling. J. Wind Eng. Ind. Aerodyn. 2013, 116, 32–39. [Google Scholar] [CrossRef]
- Maeda, T.; Kamada, Y.; Shimizu, K.; Ogasawara, T.; Nakai, A.; Kasuya, T. Effect of rotor aspect ratio and solidity on a straight-Bladed vertical axis wind turbine in three-dimensional analysis by the panel method. Energy 2017, 121, 1–9. [Google Scholar]
- Huang, D.; Zhou, S.; Han, Q.; Litak, G. Response analysis of the nonlinear vibration energy harvester with an uncertain parameter. Proc. Inst. Mech. Eng. Part K J. Multi-Body Dyn. 2020, 234, 393–407. [Google Scholar] [CrossRef]
- Han, H.; Cao, D.; Liu, L. A new approach for steady-State dynamic response of axially functionally graded and non-uniformed beams. Compos. Struct. 2019, 226, 111270. [Google Scholar] [CrossRef]
- Huan, R.; Pu, D.; Wang, X.; Wei, X. Effects of phase delay on synchronization in a nonlinear micromechanical oscillator. Appl. Phys. Lett. 2019, 114, 233501. [Google Scholar] [CrossRef]
- Verkinderen, E.; Imam, B. A simplified dynamic model for mast design of H-Darrieus vertical axis wind turbines (VAWTs). Eng. Struct. 2015, 100, 564–576. [Google Scholar] [CrossRef]
- Wang, Y.; Lu, W.; Dai, K.; Yuan, M.; Chen, S.-E. Dynamic study of a rooftop vertical axis wind turbine tower based on an automated vibration data processing algorithm. Energies 2018, 11, 3135. [Google Scholar] [CrossRef] [Green Version]
- Rahman, M.; Ong, Z.C.; Chong, W.T.; Julai, S.; Khoo, S.Y. Performance enhancement of wind turbine systems with vibration control: A review. Renew. Sustain. Energy Rev. 2015, 51, 43–54. [Google Scholar] [CrossRef]
- Mabrouk, I.B.; El Hami, A.; Walha, L.; Zghal, B.; Haddar, M. Dynamic vibrations in wind energy systems: Application to vertical axis wind turbine. Mech. Syst. Signal Process. 2017, 85, 396–414. [Google Scholar] [CrossRef]
- Yan, Y.; Wiercigroch, M. Dynamics of rotary drilling with non-uniformly distributed blades. Int. J. Mech. Sci. 2019, 160, 270–281. [Google Scholar] [CrossRef]
- Meirovitch, L. Principles and Techniques of Vibrations; Prentice Hall: Upper Saddle River, NJ, USA, 1997; Volume 1. [Google Scholar]
- Chopra, A.K. Dynamics of Structures, Theory and Applications to Earthquake Engineering; Pearson-Prentice Hall: Upper Saddle River, NJ, USA, 2012. [Google Scholar]
- Xie, Z.; Liu, H. Experimental research on the interface lubrication regimes transition of water lubricated bearing. Mech. Syst. Signal Process. 2020, 136, 106522. [Google Scholar] [CrossRef]
- Chen, W.; Rajan, S.; Nelson, H.; Rajan, M. Application of nonlinear programming for balancing rotor systems. Eng. Optim. 1991, 17, 79–90. [Google Scholar] [CrossRef]


























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Model Part | Mass | Stiffness | Value | |||
|---|---|---|---|---|---|---|
| H-type Mass | Hybrid Mass | H-type Stiffness | Hybrid Stiffness | |||
| Node 1 | Upper spokes + 50% of blades and shaft | / | 44.9 | 50.2 | 0 | 0 |
| Beam 1 | No mass | Shaft between nodes 1 and 2 | 0 | 0 | ||
| Node 2 | Lower spokes + 50% of blades and shaft | / | 44.9 | 50.2 | 0 | 0 |
| Beam 2 | No mass | Shaft between nodes 2 and 3 | 0 | 0 | ||
| Node 3 | Generator | / | 604.5 | 604.5 | 0 | 0 |
| Input Variable | Value/Setting |
|---|---|
| Turbulence Model | Spalart-Allmaras model |
| Pressure-velocity coupling | SIMPLE |
| Spatial discretization scheme | Second-order upwind |
| Time integration | Second-order implicit |
| Inlet turbulence viscosity ratio | 10 |
| Convergence criterion for residuals | 10−5 |
| Reynolds number | 4.9 × 105 |
| Parameter | Value |
|---|---|
| Mast height | |
| Outer diameter of the cross-section | |
| Mast thickness | |
| Inertia of the cross-section | |
| Mast mass | |
| Turbine mass for the H-type VAWT | |
| Turbine mass for the hybrid VAWT | |
| Young’s modulus | |
| Material density of steel |
| Case | (Hz) | (Hz) | ||||||
|---|---|---|---|---|---|---|---|---|
| Case 1 | 1 | 88.9 | 66.7 | 5 | 0.25 | 1.38 × 106 | 3.87 | 3.98 |
| Case 2 | 2 | 133 | 100 | 5 | 0.25 | 4.62 × 106 | 2.96 | 2.99 |
| Case 3 | 4 | 200 | 150 | 5 | 0.25 | 1.57 × 107 | 2.07 | 2.05 |
| Element No. | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | |
|---|---|---|---|---|---|---|---|---|---|---|---|
| 1 m | 40 | 40 | 66.7 | 69.8 | 72.9 | 76.0 | 79.1 | 82.2 | 85.3 | 88.9 | |
| 20 | 20 | 5 | 5 | 5 | 5 | 5 | 5 | 5 | 5 | ||
| 900 | 100 | 125 | 125 | 125 | 125 | 125 | 125 | 125 | 125 | ||
| H-type m (kg) | 44.9 | 44.9 | 604.5 | 1.3 | 1.3 | 1.3 | 1.3 | 1.3 | 1.3 | 1.3 | |
| Hybrid m (kg) | 50.2 | 50.2 | 604.5 | 1.3 | 1.3 | 1.3 | 1.3 | 1.3 | 1.3 | 1.3 | |
| 2 m | 40 | 40 | 100 | 105 | 109 | 114 | 119 | 123 | 128 | 133 | |
| 20 | 20 | 5 | 5 | 5 | 5 | 5 | 5 | 5 | 5 | ||
| 900 | 100 | 250 | 250 | 250 | 250 | 250 | 250 | 250 | 250 | ||
| H-type m (kg) | 44.9 | 44.9 | 604.5 | 3.9 | 3.9 | 3.9 | 3.9 | 3.9 | 3.9 | 3.9 | |
| Hybrid m (kg) | 50.2 | 50.2 | 604.5 | 3.9 | 3.9 | 3.9 | 3.9 | 3.9 | 3.9 | 3.9 | |
| 4 m | 40 | 40 | 150 | 157 | 164 | 171 | 178 | 185 | 192 | 200 | |
| 20 | 20 | 5 | 5 | 5 | 5 | 5 | 5 | 5 | 5 | ||
| 900 | 100 | 500 | 500 | 500 | 500 | 500 | 500 | 500 | 500 | ||
| H-type m (kg) | 44.9 | 44.9 | 604.5 | 12.0 | 12.0 | 12.0 | 12.0 | 12.0 | 12.0 | 12.0 | |
| Hybrid m (kg) | 50.2 | 50.2 | 604.5 | 12.0 | 12.0 | 12.0 | 12.0 | 12.0 | 12.0 | 12.0 | |
| Mast Height | Mode | SDOF | MDOF | Difference |
|---|---|---|---|---|
| 1 m | 1 | 3.87 | 3.73 | 3.67% |
| 2 | 399.4 | |||
| 3 | 1004 | |||
| 2 m | 1 | 2.96 | 2.87 | 3.12% |
| 2 | 145.1 | |||
| 3 | 399.2 | |||
| 4 m | 1 | 2.07 | 2.00 | 3.50% |
| 2 | 50.0 | |||
| 3 | 150.5 |
| Mast Height | Mode | SDOF | MDOF | Difference |
|---|---|---|---|---|
| 1 m | 1 | 3.98 | 3.85 | 3.25% |
| 2 | 412.4 | |||
| 3 | 1105 | |||
| 2 m | 1 | 2.99 | 2.89 | 3.53% |
| 2 | 170.5 | |||
| 3 | 417.9 | |||
| 4 m | 1 | 2.05 | 1.99 | 3.02% |
| 2 | 69.0 | |||
| 3 | 166.8 |
| Mast Height | Mode | MDOF | BEM | Difference |
|---|---|---|---|---|
| 1 m | 1 | 3.73 | 3.60 | 3.54% |
| 2 | 399.4 | 386.9 | 3.22% | |
| 3 | 1004 | 999.4 | 0.49% | |
| 2 m | 1 | 2.87 | 2.78 | 3.09% |
| 2 | 145.1 | 141.0 | 2.88% | |
| 3 | 399.2 | 398.7 | 0.13% | |
| 4 m | 1 | 2.00 | 1.94 | 3.09% |
| 2 | 50.0 | 48.6 | 2.88% | |
| 3 | 150.5 | 150.3 | 0.13% |
| Mast Height | Mode | MDOF | BEM | Difference |
|---|---|---|---|---|
| 1 m | 1 | 3.85 | 3.73 | 3.16% |
| 2 | 412.4 | 411.5 | 0.22% | |
| 3 | 1105 | 1084 | 1.92% | |
| 2 m | 1 | 2.89 | 2.80 | 3.11% |
| 2 | 170.5 | 164.1 | 3.92% | |
| 3 | 417.9 | 417.4 | 0.12% | |
| 4 m | 1 | 1.99 | 1.93 | 3.11% |
| 2 | 69.0 | 66.4 | 3.92% | |
| 3 | 166.8 | 167.0 | 0.12% |
| Direction | H-type VAWT (m) | Hybrid VAWT (m) | Difference |
|---|---|---|---|
| X-direction | 26.9% | ||
| Y-direction | 22.6% | ||
| Difference | 11.1% | 14.9% |
| Direction | H-type VAWT (m) | Hybrid VAWT (m) | Difference |
|---|---|---|---|
| X-direction | 24.6% | ||
| Y-direction | 31.6% | ||
| Difference | 5.76% | 11.8% |
| Mode | H-type VAWT BEM (Hz) | H-type VAWT SEM (Hz) | Difference | Hybrid VAWT BEM (Hz) | Hybrid VAWT SEM (Hz) | Difference |
|---|---|---|---|---|---|---|
| 1 | 3.60 | 3.65 | 1.39% | 3.73 | 3.79 | 1.61% |
| 2 | 386.9 | 402.5 | 4.03% | 411.5 | 429.2 | 4.30% |
| 3 | 999.4 | 1032 | 3.26% | 1084 | 1121 | 3.41% |
| Mode | H-type VAWT BEM (Hz) | H-type VAWT SEM (Hz) | Difference | Hybrid VAWT BEM (Hz) | Hybrid VAWT SEM (Hz) | Difference |
|---|---|---|---|---|---|---|
| 1 | 1.94 | 1.92 | 1.04% | 1.93 | 1.90 | 1.58% |
| 2 | 48.6 | 50.2 | 3.31% | 64.4 | 66.9 | 3.97% |
| 3 | 150.3 | 154.1 | 2.53% | 167.0 | 170.4 | 2.02% |
| Mode | H-type VAWT (m) | Hybrid VAWT (m) | Difference |
|---|---|---|---|
| X-direction | 23.8% | ||
| Y-direction | 20.5% | ||
| Difference | 17.4% | 20.1% |
| Mode | H-type VAWT (m) | Hybrid VAWT (m) | Difference |
|---|---|---|---|
| X-direction | 22.8% | ||
| Y-direction | 24.3% | ||
| Difference | 13.8% | 15.3% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tong, M.; Zhu, W.; Zhao, X.; Yu, M.; Liu, K.; Li, G. Free and Forced Vibration Analysis of H-type and Hybrid Vertical-Axis Wind Turbines. Energies 2020, 13, 6747. https://doi.org/10.3390/en13246747
Tong M, Zhu W, Zhao X, Yu M, Liu K, Li G. Free and Forced Vibration Analysis of H-type and Hybrid Vertical-Axis Wind Turbines. Energies. 2020; 13(24):6747. https://doi.org/10.3390/en13246747
Chicago/Turabian StyleTong, Minhui, Weidong Zhu, Xiang Zhao, Meilin Yu, Kan Liu, and Gang Li. 2020. "Free and Forced Vibration Analysis of H-type and Hybrid Vertical-Axis Wind Turbines" Energies 13, no. 24: 6747. https://doi.org/10.3390/en13246747
APA StyleTong, M., Zhu, W., Zhao, X., Yu, M., Liu, K., & Li, G. (2020). Free and Forced Vibration Analysis of H-type and Hybrid Vertical-Axis Wind Turbines. Energies, 13(24), 6747. https://doi.org/10.3390/en13246747