
Transformer Fault Diagnosis Model Based on Improved Gray Wolf Optimizer and Probabilistic Neural Network


Abstract
:1. Introduction
2. Method
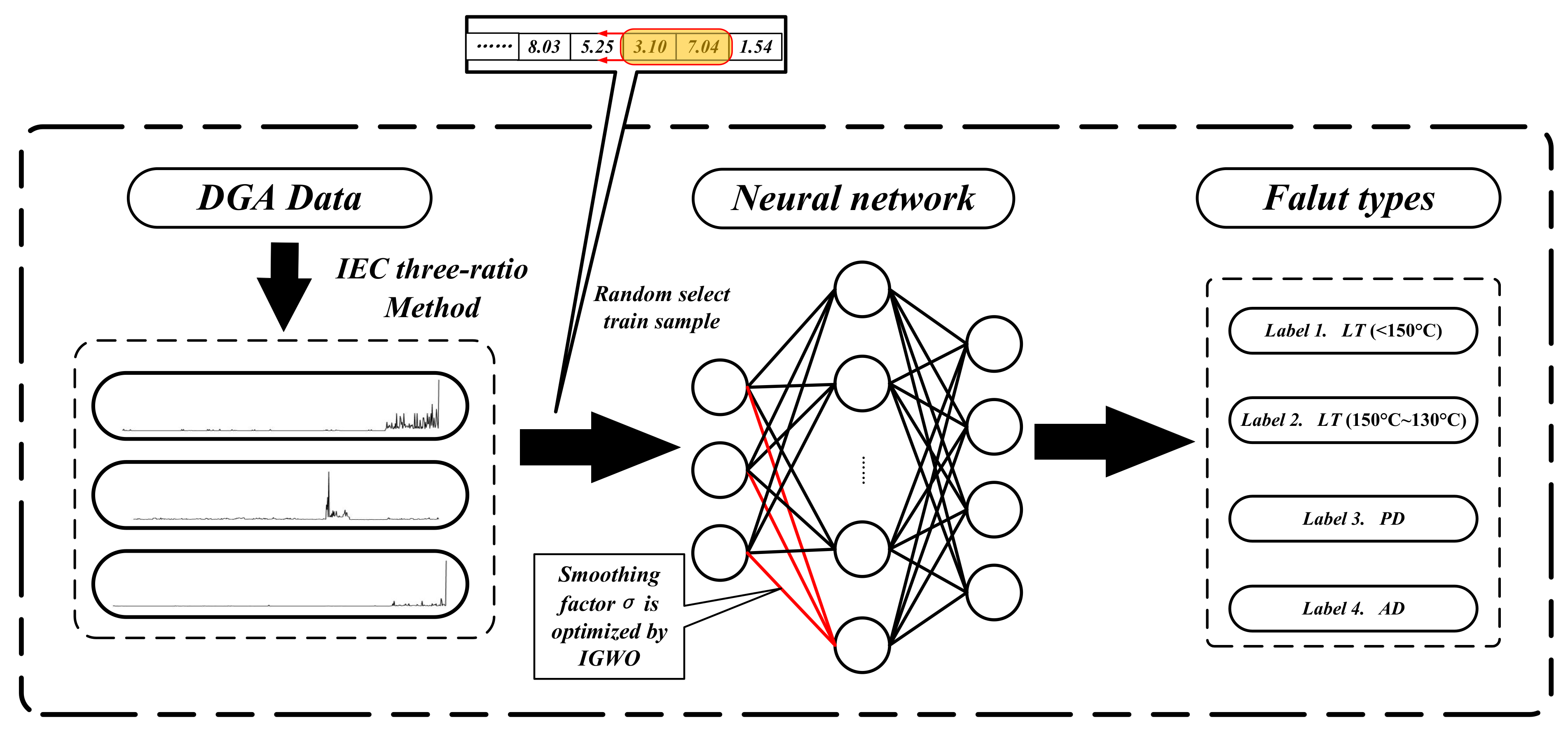
2.1. IEC Three-Ratio Method
2.2. Improved Gray Wolf Optimizer
| Algorithm 1 Pseudocode of the modified IGWO algorithm |
|
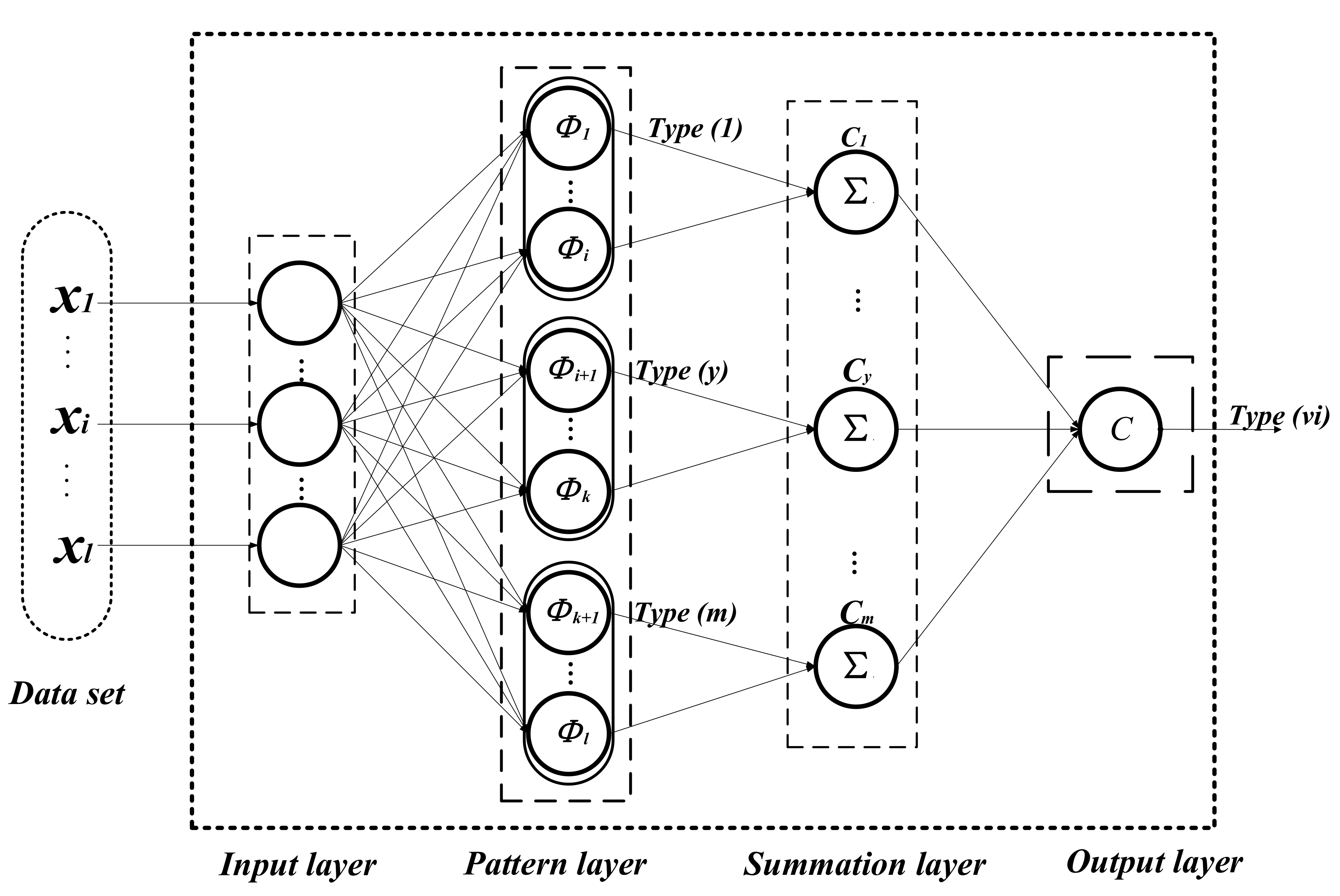
2.3. Brief Introduction of Probabilistic Neural Network
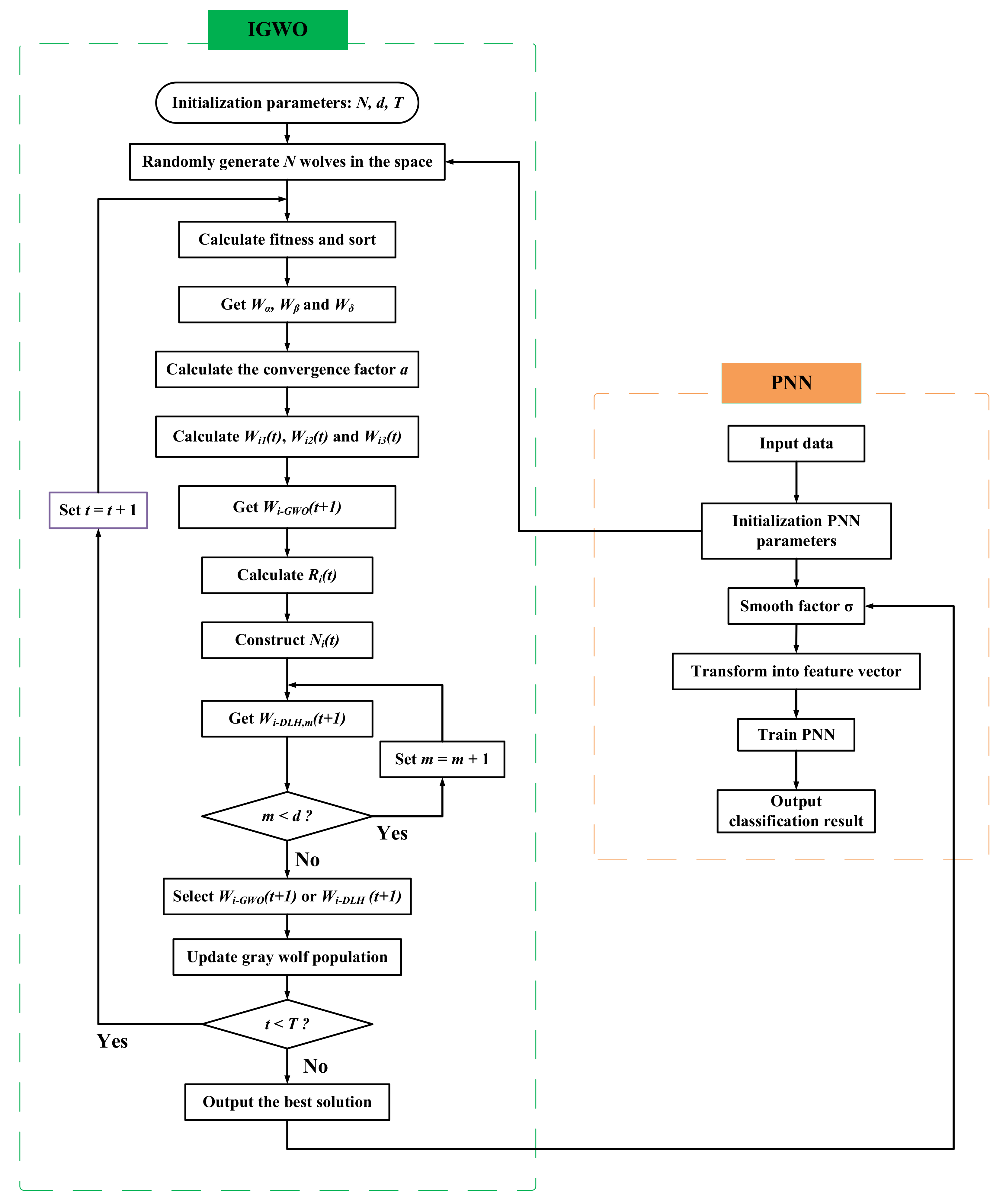
2.4. Improved Gray Wolf Optimizer Based on Probabilistic Neural Network (IGWO-PNN)
3. Establishment of the Experiment
3.1. Model Implementation
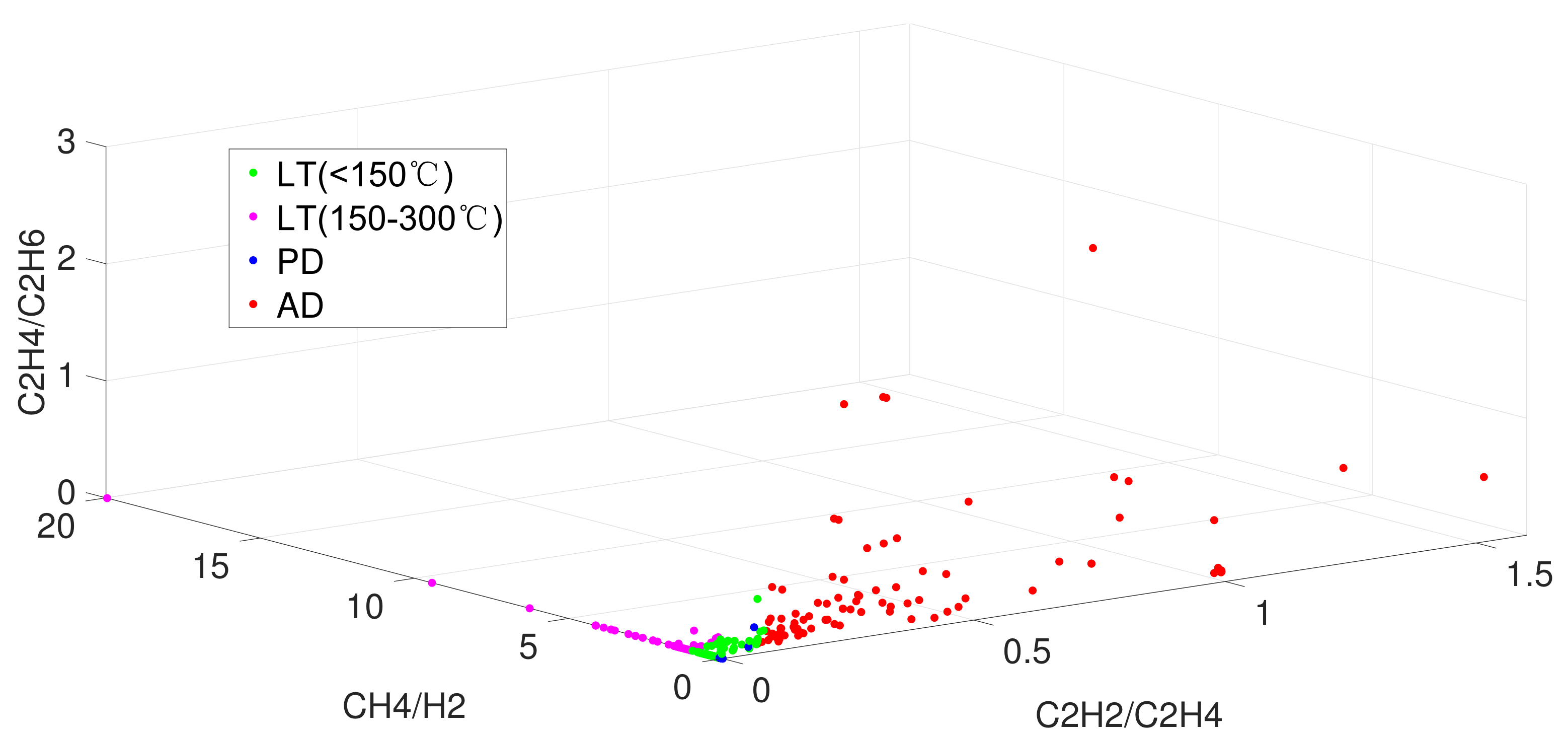
3.2. Data Acquisition and Preprocessing
4. Experimental Results
4.1. Compared Methods
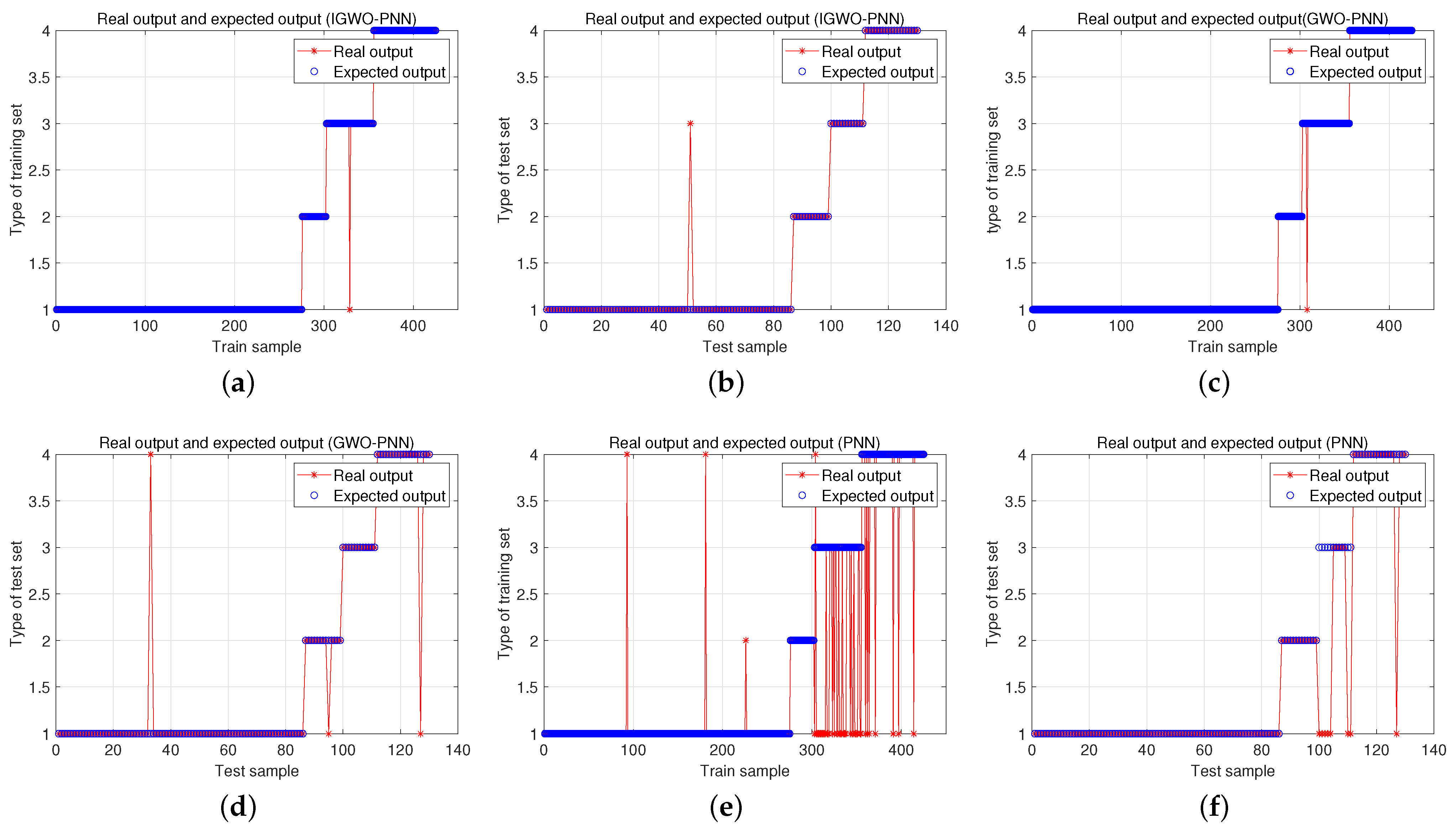
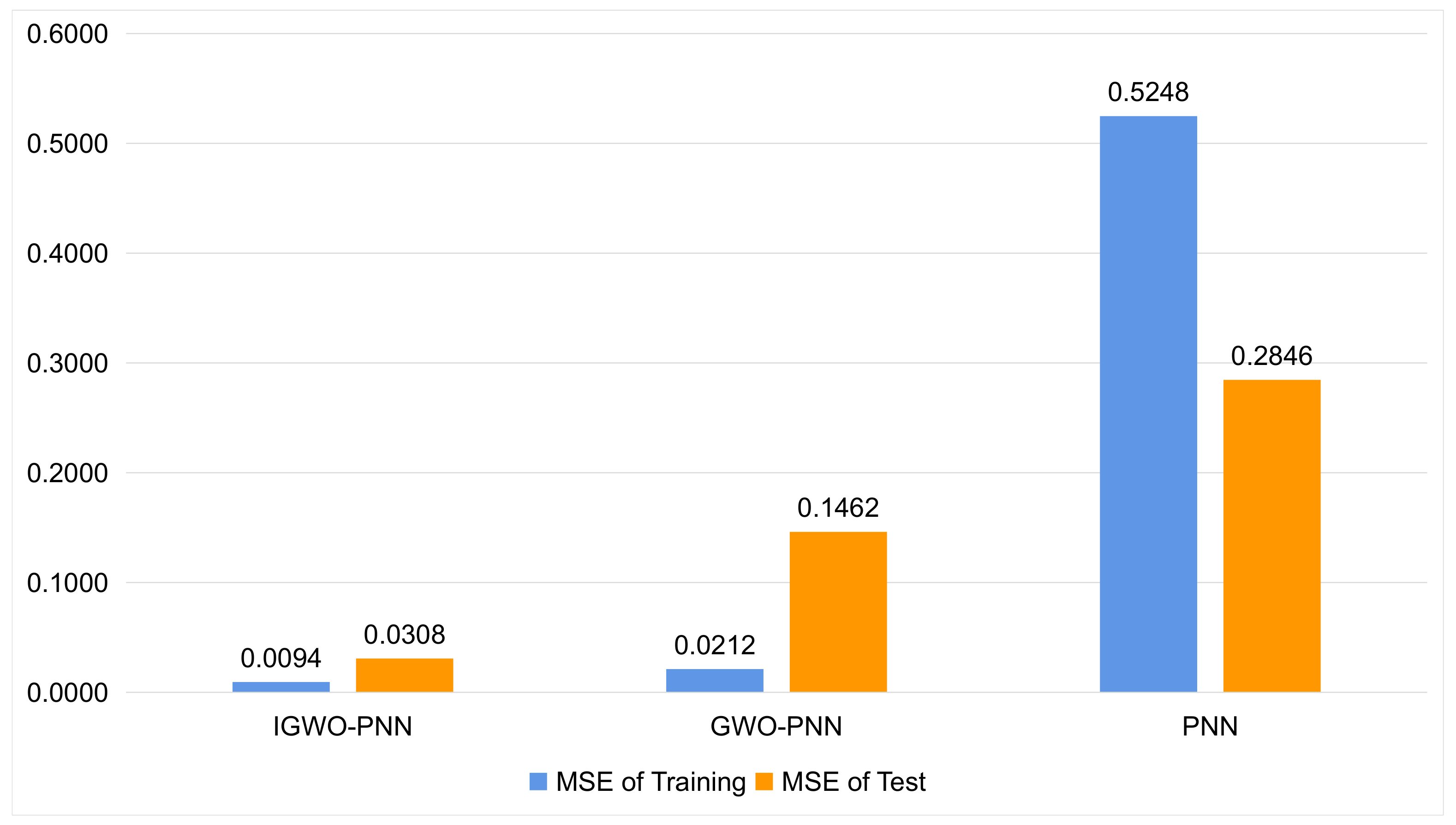
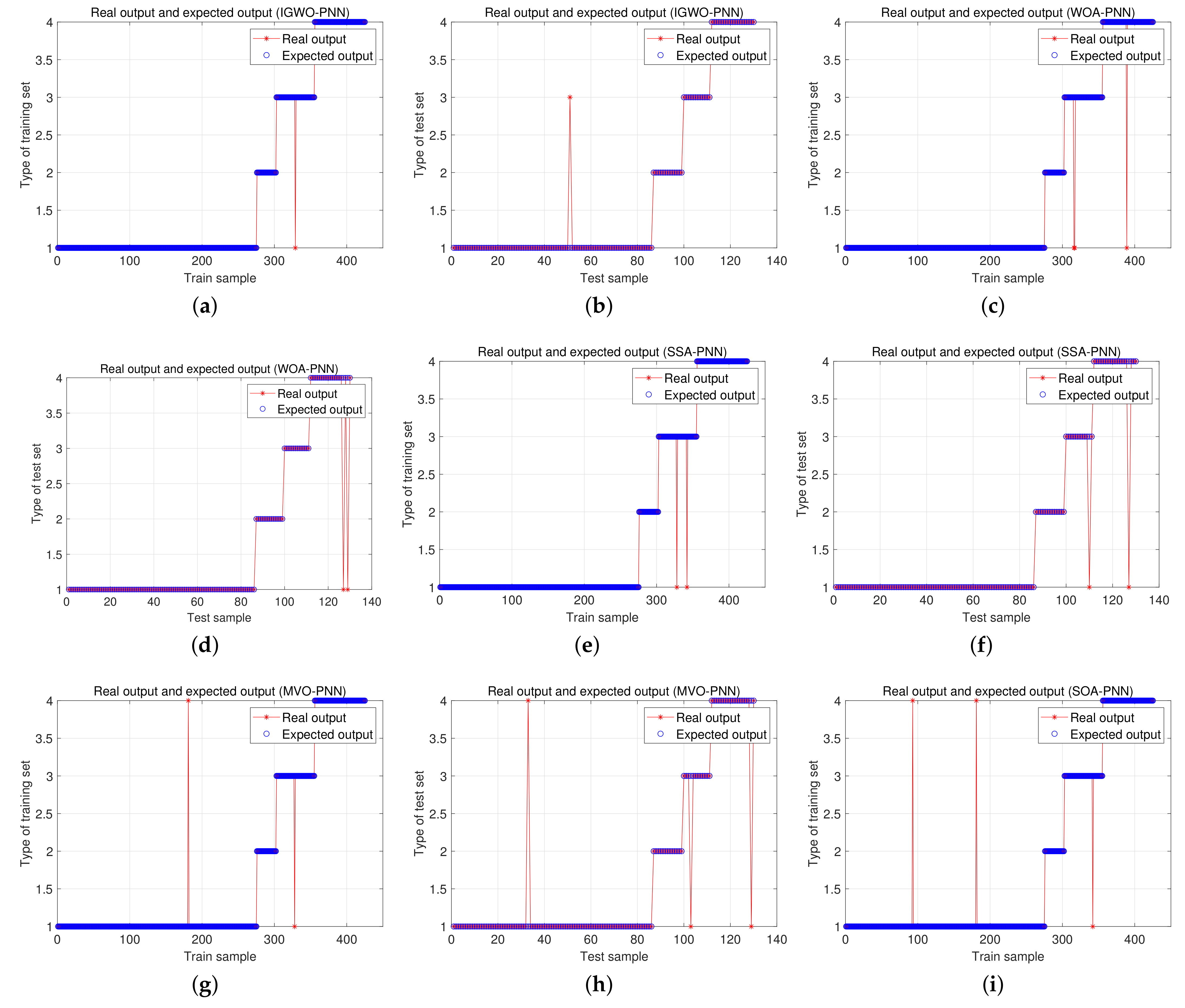
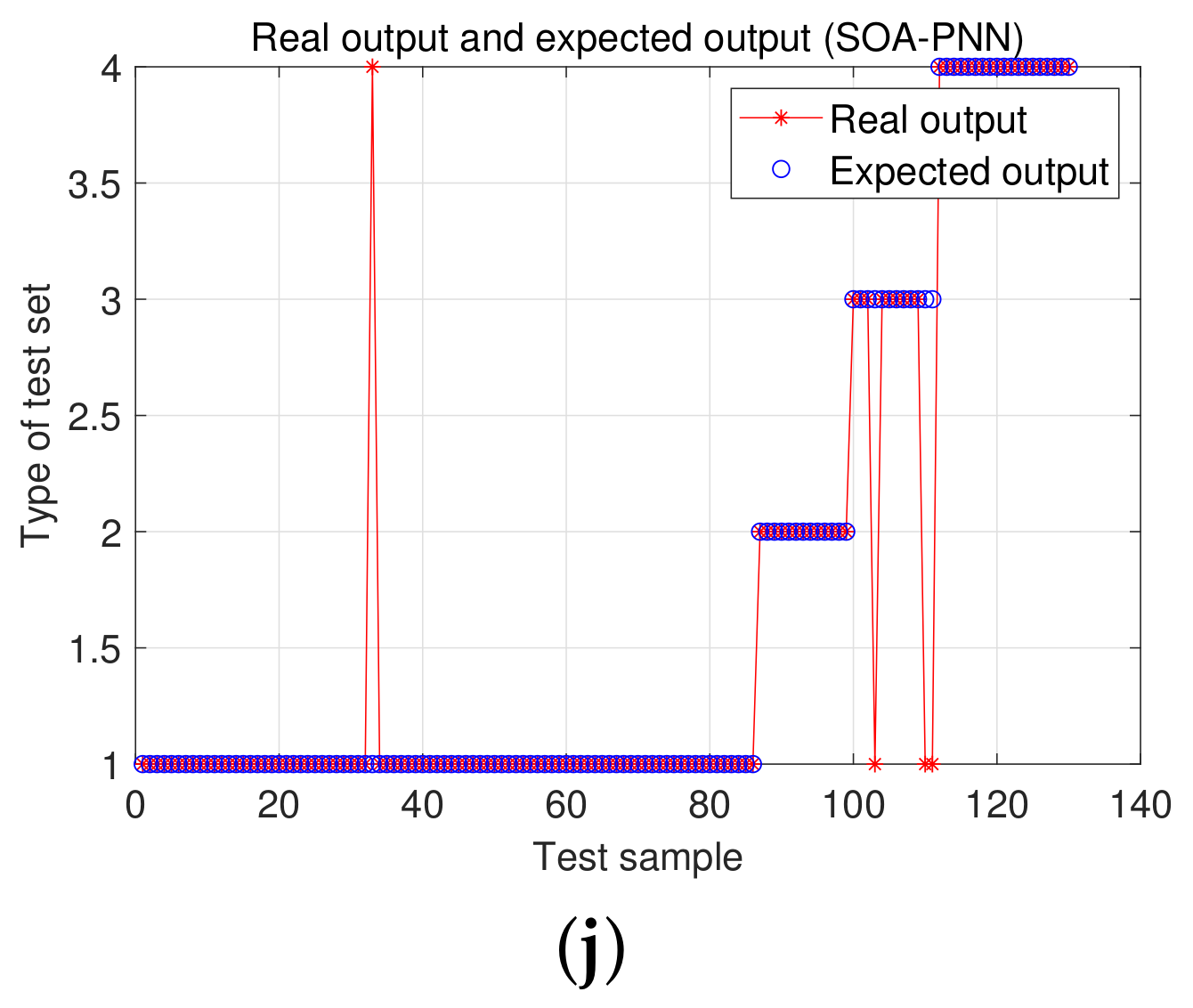
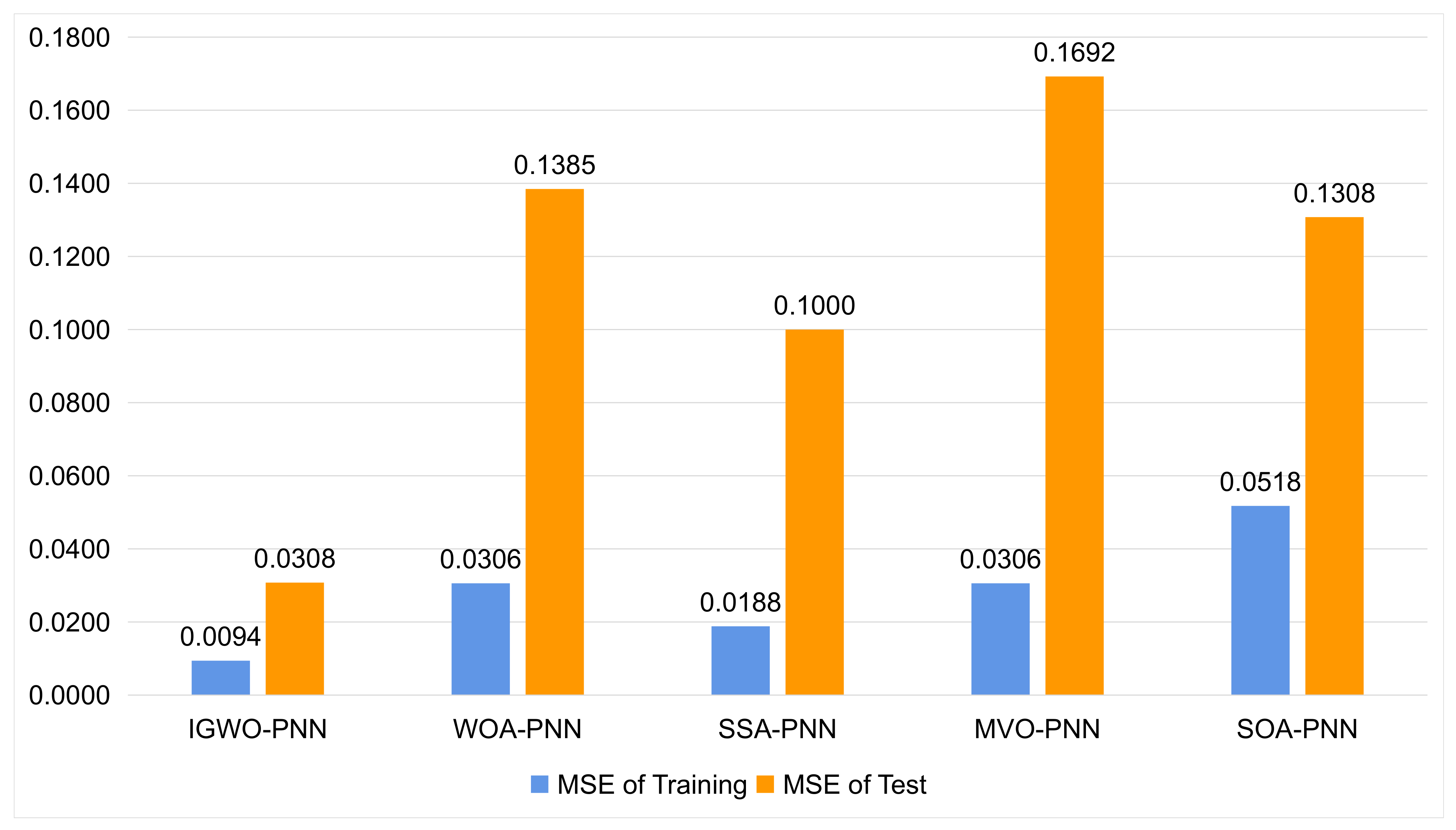
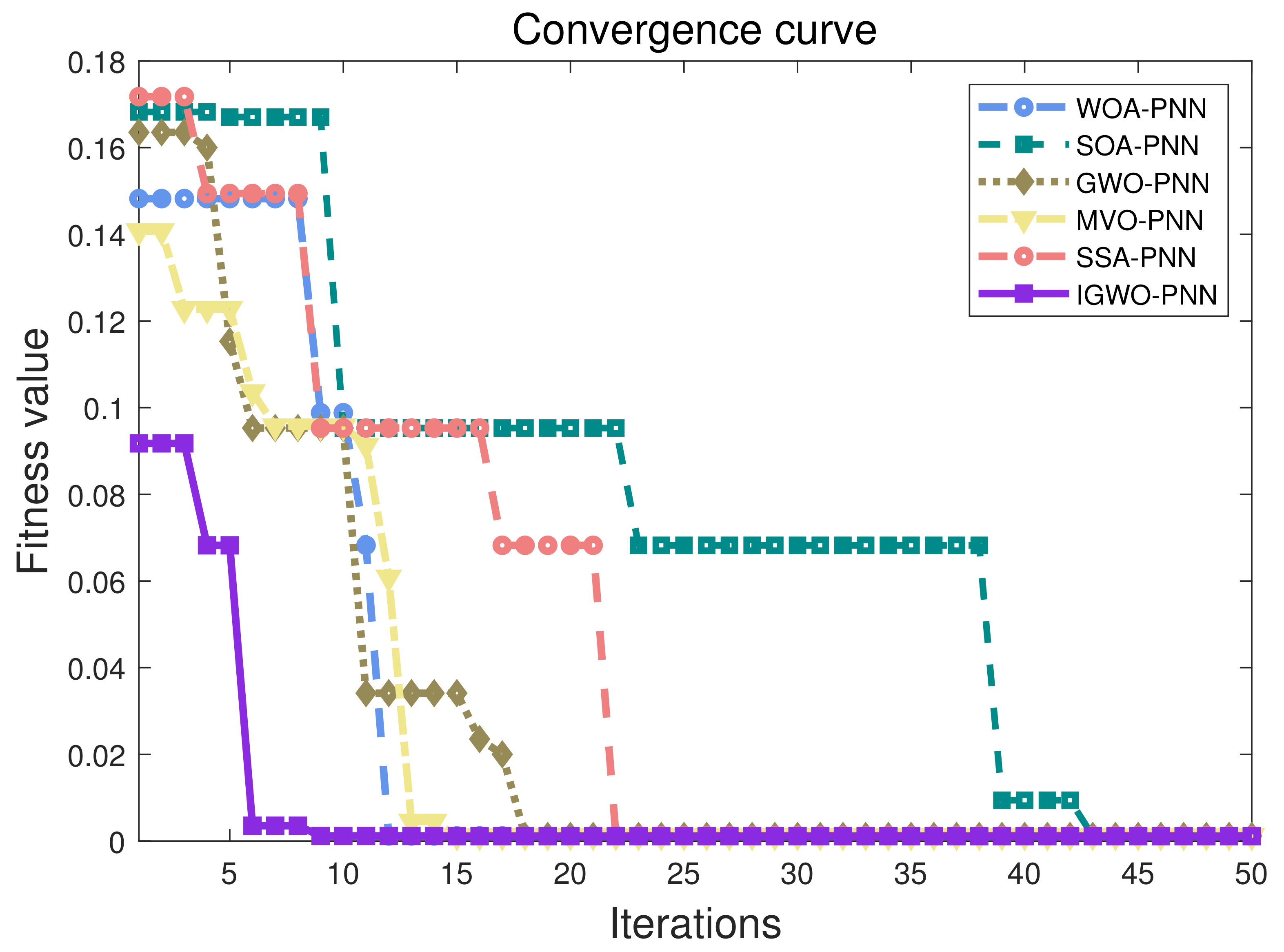
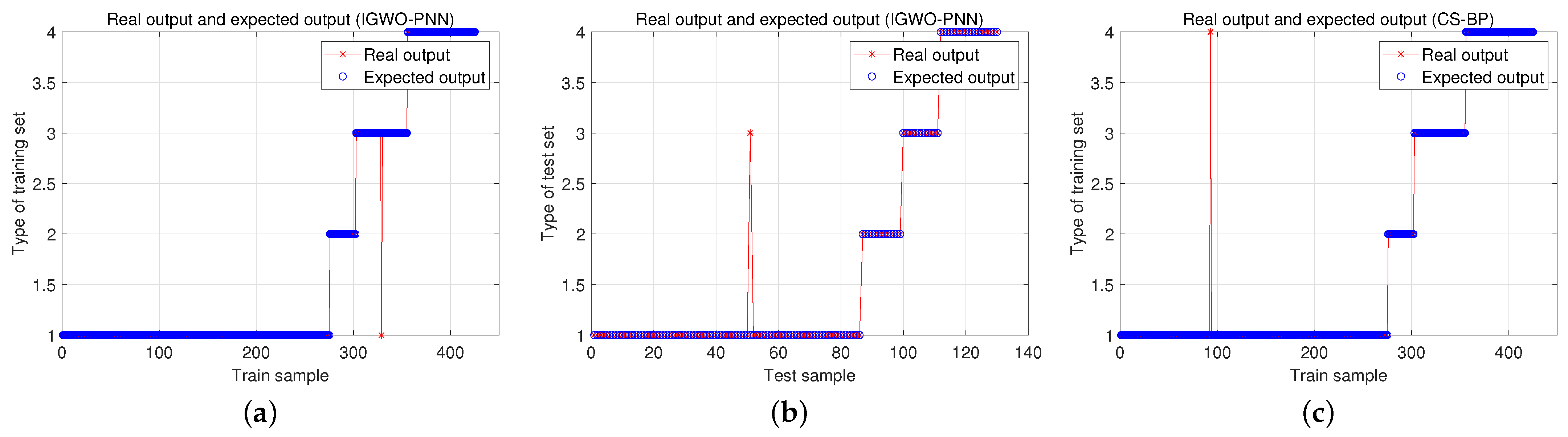
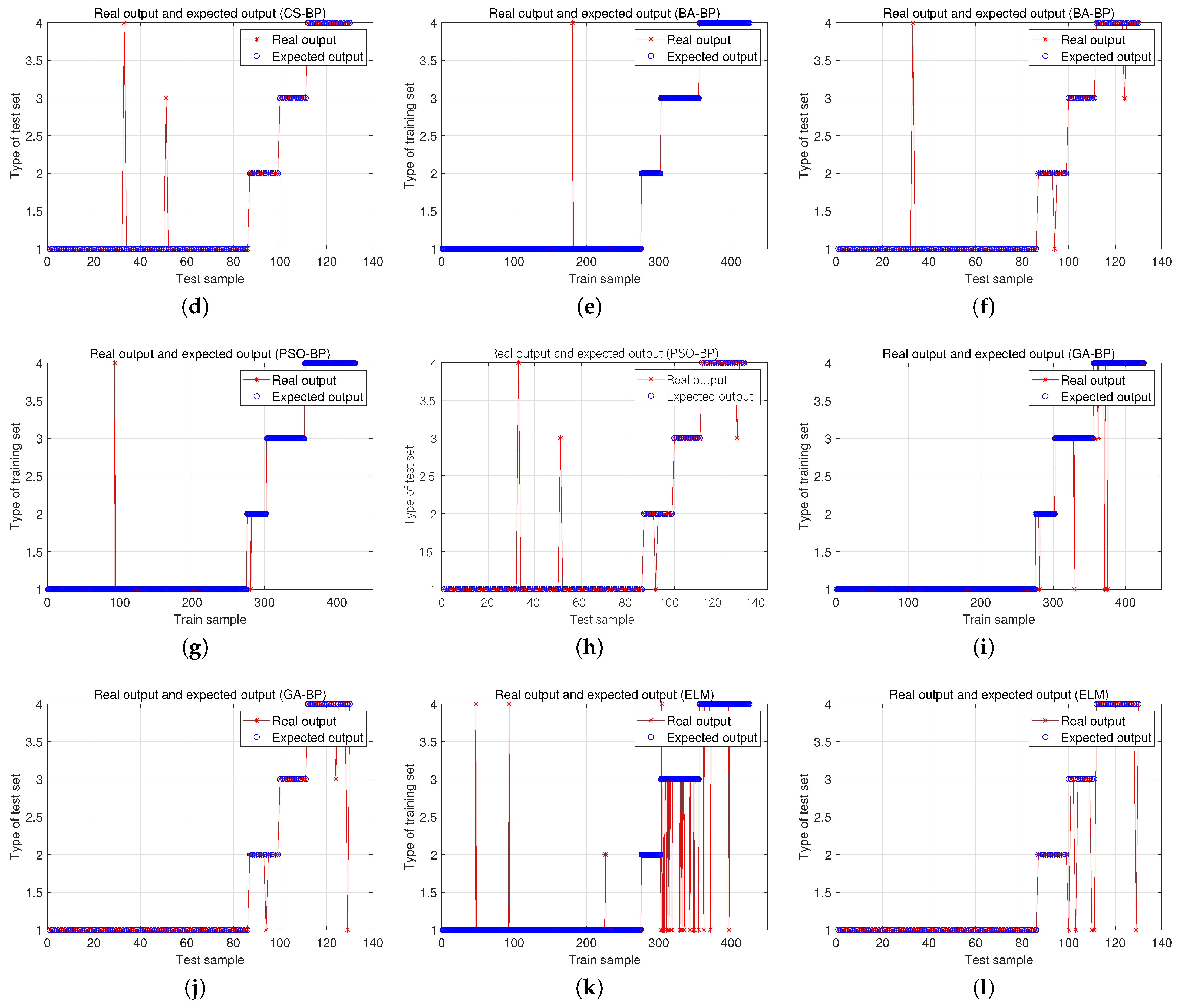
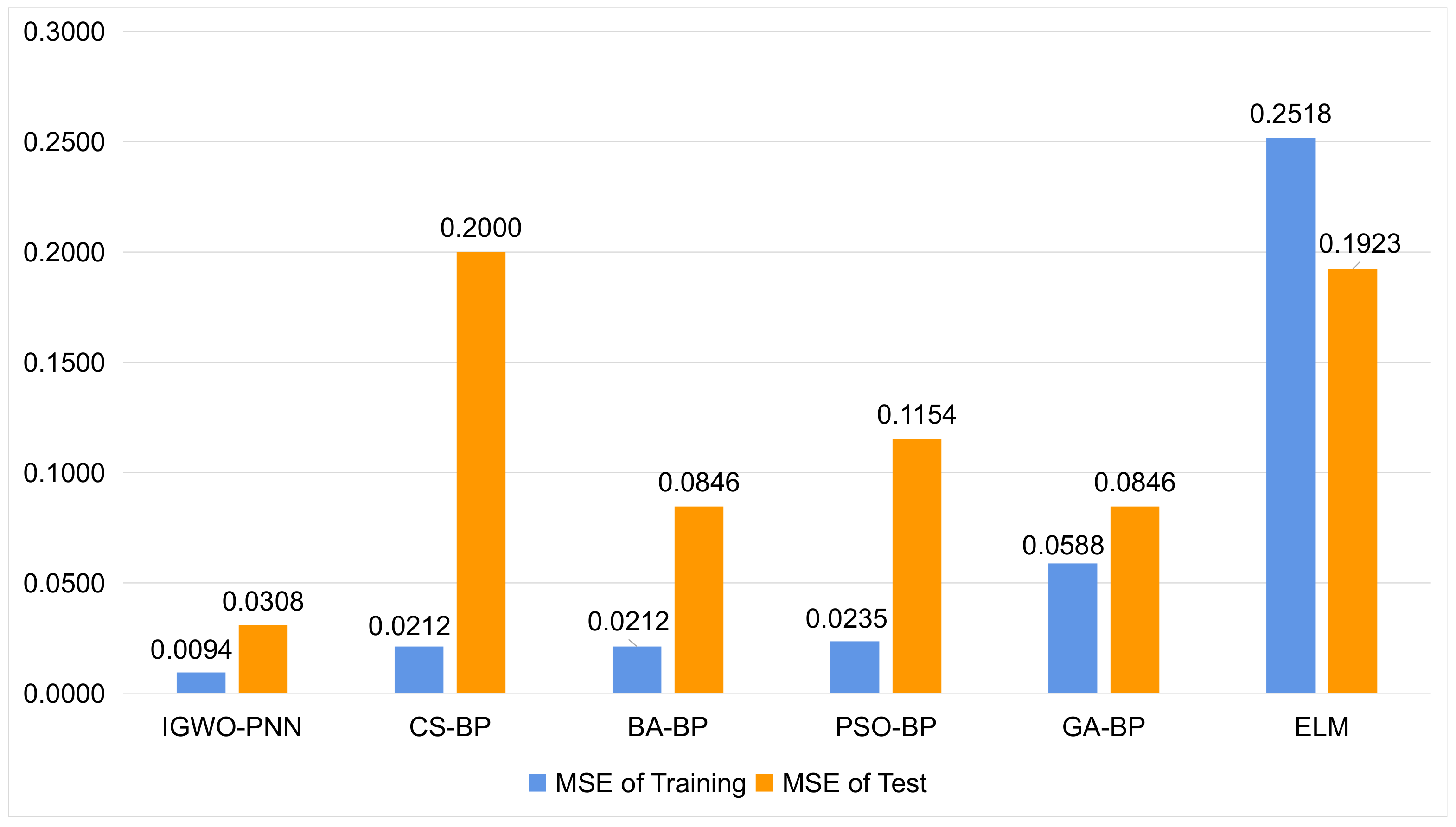
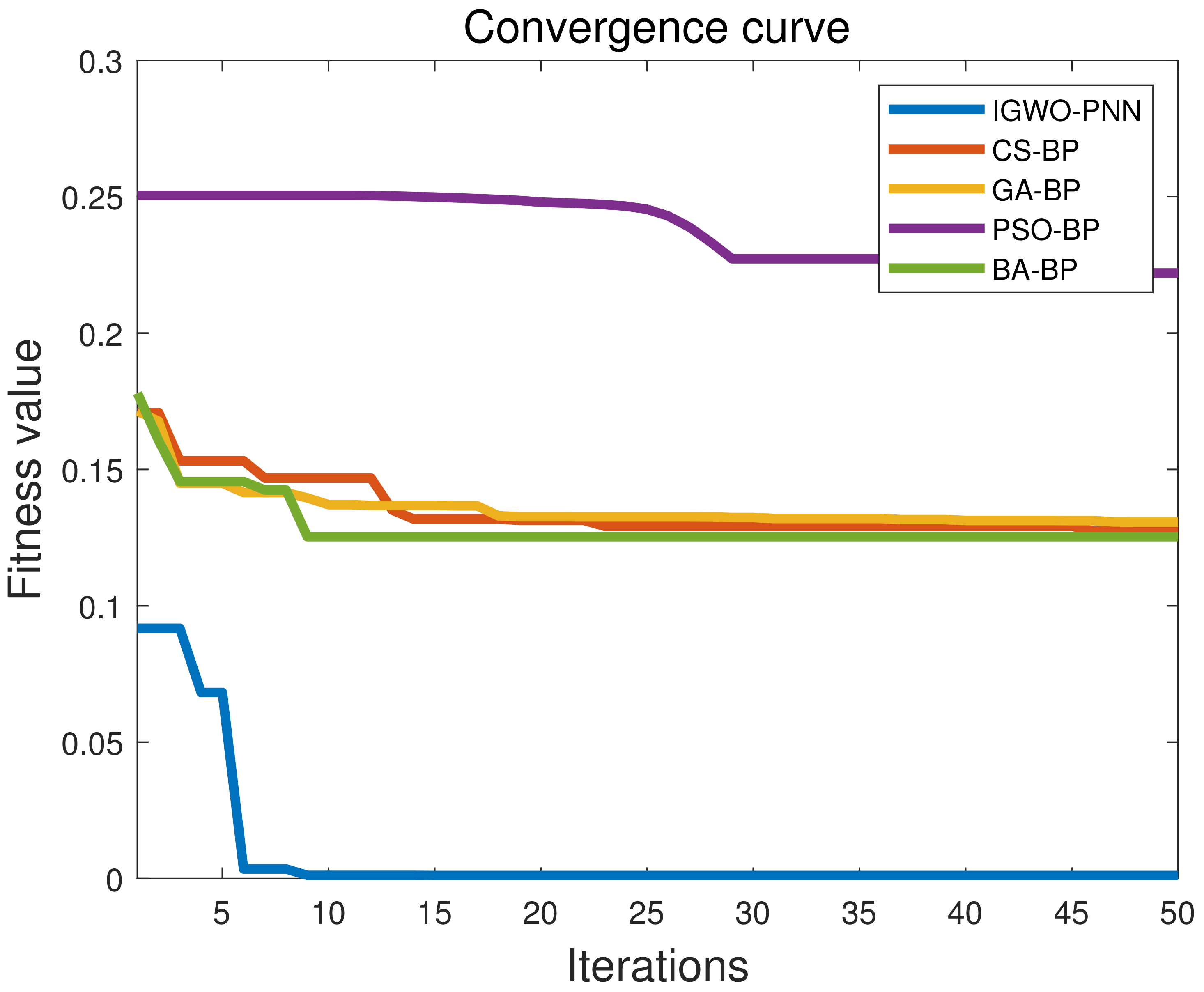
4.2. Results of Model Comparison
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Wang, X.; Li, Q.; Li, C.; Yang, R.; Su, Q. Reliability assessment of the fault diagnosis methodologies for transformers and a new diagnostic scheme based on fault info integration. IEEE Trans. Dielectr. Electr. Insul. 2013, 20, 2292–2298. [Google Scholar] [CrossRef]
- Etumi, A.A.; Anayi, F. The application of correlation technique in detecting internal and external faults in three-phase transformer and saturation of current transformer. IEEE Trans. Power Deliv. 2016, 31, 2131–2139. [Google Scholar] [CrossRef]
- Oliveira, L.M.; Cardoso, A.M. A permeance-based transformer model and its application to winding interturn arcing fault studies. IEEE Trans. Power Deliv. 2010, 25, 1589–1598. [Google Scholar] [CrossRef]
- Pei, X.; Nie, S.; Chen, Y.; Kang, Y. Open-circuit fault diagnosis and fault-tolerant strategies for full-bridge DC–DC converters. IEEE Trans. Power Electron. 2011, 27, 2550–2565. [Google Scholar] [CrossRef]
- Faiz, J.; Soleimani, M. Assessment of computational intelligence and conventional dissolved gas analysis methods for transformer fault diagnosis. IEEE Trans. Dielectr. Electr. Insul. 2018, 25, 1798–1806. [Google Scholar] [CrossRef]
- Duval, M. The duval triangle for load tap changers, non-mineral oils and low temperature faults in transformers. IEEE Electr. Insul. Mag. 2008, 24, 22–29. [Google Scholar] [CrossRef]
- Arakelian, V. Effective diagnostics for oil-filled equipment. IEEE Electr. Insul. Mag. 2002, 18, 26–38. [Google Scholar] [CrossRef]
- Duval, M. New techniques for dissolved gas-in-oil analysis. IEEE Electr. Insul. Mag. 2003, 19, 6–15. [Google Scholar] [CrossRef]
- Khan, S.A.; Equbal, M.D.; Islam, T. A comprehensive comparative study of DGA based transformer fault diagnosis using fuzzy logic and ANFIS models. IEEE Trans. Dielectr. Electr. Insul. 2015, 22, 590–596. [Google Scholar] [CrossRef]
- Li, L.; Yong, C.; Long-Jun, X.; Li-Qiu, J.; Ning, M.; Ming, L. An integrated method of set pair analysis and association rule for fault diagnosis of power transformers. IEEE Trans. Dielectr. Electr. Insul. 2015, 22, 2368–2378. [Google Scholar] [CrossRef]
- Jiang, J.; Chen, R.; Chen, M.; Wang, W.; Zhang, C. Dynamic fault prediction of power transformers based on hidden Markov model of dissolved gases analysis. IEEE Trans. Power Deliv. 2019, 34, 1393–1400. [Google Scholar] [CrossRef]
- Li, J.; Zhang, Q.; Wang, K.; Wang, J.; Zhou, T.; Zhang, Y. Optimal dissolved gas ratios selected by genetic algorithm for power transformer fault diagnosis based on support vector machine. IEEE Trans. Dielectr. Electr. Insul. 2016, 23, 1198–1206. [Google Scholar] [CrossRef]
- Wang, X.; Li, Q.; Yang, R.; Li, C.; Zhang, Y. Diagnosis of solid insulation deterioration for power transformers with dissolved gas analysis-based time series correlation. IET Sci. Meas. Technol. 2015, 9, 393–399. [Google Scholar] [CrossRef]
- Chine, W.; Mellit, A.; Lughi, V.; Malek, A.; Sulligoi, G.; Pavan, A.M. A novel fault diagnosis technique for photovoltaic systems based on artificial neural networks. Renew. Energy 2016, 90, 501–512. [Google Scholar] [CrossRef]
- Li, S.; Wu, G.; Gao, B.; Hao, C.; Xin, D.; Yin, X. Interpretation of DGA for transformer fault diagnosis with complementary SaE-ELM and arctangent transform. IEEE Trans. Dielectr. Electr. Insul. 2016, 23, 586–595. [Google Scholar] [CrossRef]
- Dong, H.; Yang, X.; Li, A.; Xie, Z.; Zuo, Y. Bio-inspired PHM model for diagnostics of faults in power transformers using dissolved Gas-in-Oil data. Sensors 2019, 19, 845. [Google Scholar] [CrossRef]
- Kim, S.; Jo, S.H.; Kim, W.; Park, J.; Jeong, J.; Han, Y.; Kim, D.; Youn, B.D. A Semi-Supervised Autoencoder With an Auxiliary Task (SAAT) for Power Transformer Fault Diagnosis Using Dissolved Gas Analysis. IEEE Access 2020, 8, 178295–178310. [Google Scholar] [CrossRef]
- Song, T.; Jamshidi, M.M.; Lee, R.R.; Huang, M. A modified probabilistic neural network for partial volume segmentation in brain MR image. IEEE Trans. Neural Netw. 2007, 18, 1424–1432. [Google Scholar] [CrossRef]
- Kusy, M.; Zajdel, R. Probabilistic neural network training procedure based on Q (0)-learning algorithm in medical data classification. Appl. Intell. 2014, 41, 837–854. [Google Scholar] [CrossRef]
- Lee, J.H.; Kim, J.W.; Song, J.Y.; Kim, Y.J.; Jung, S.Y. A novel memetic algorithm using modified particle swarm optimization and mesh adaptive direct search for PMSM design. IEEE Trans. Magn. 2015, 52, 1–4. [Google Scholar] [CrossRef]
- Choi, K.; Jang, D.H.; Kang, S.I.; Lee, J.H.; Chung, T.K.; Kim, H.S. Hybrid algorithm combing genetic algorithm with evolution strategy for antenna design. IEEE Trans. Magn. 2015, 52, 1–4. [Google Scholar] [CrossRef]
- Li, X.; Ma, S.; Yang, G. Synthesis of difference patterns for monopulse antennas by an improved cuckoo search algorithm. IEEE Antennas Wirel. Propag. Lett. 2016, 16, 141–144. [Google Scholar] [CrossRef]
- Senthilnath, J.; Kulkarni, S.; Benediktsson, J.A.; Yang, X.S. A novel approach for multispectral satellite image classification based on the bat algorithm. IEEE Geosci. Remote Sens. Lett. 2016, 13, 599–603. [Google Scholar] [CrossRef]
- Yang, X.; Chen, W.; Li, A.; Yang, C.; Xie, Z.; Dong, H. BA-PNN-based methods for power transformer fault diagnosis. Adv. Eng. Inform. 2019, 39, 178–185. [Google Scholar]
- Mirjalili, S.; Mirjalili, S.M.; Lewis, A. Grey wolf optimizer. Adv. Eng. Softw. 2014, 69, 46–61. [Google Scholar] [CrossRef]
- Nadimi-Shahraki, M.H.; Taghian, S.; Mirjalili, S. An improved grey wolf optimizer for solving engineering problems. Expert Syst. Appl. 2021, 166, 113917. [Google Scholar] [CrossRef]
- Ma, J.; Li, Z.; Li, C.; Zhan, L.; Zhang, G.Z. Rolling Bearing Fault Diagnosis Based on Refined Composite Multi-Scale Approximate Entropy and Optimized Probabilistic Neural Network. Entropy 2021, 23, 259. [Google Scholar] [CrossRef]
- Specht, D.F. Probabilistic neural networks. Neural Netw. 1990, 3, 109–118. [Google Scholar] [CrossRef]
- Yang, X.; Chen, W.; Li, A.; Yang, C. A Hybrid machine-learning method for oil-immersed power transformer fault diagnosis. IEEJ Trans. Electr. Electron. Eng. 2020, 15, 501–507. [Google Scholar]
- Mirjalili, S.; Lewis, A. The whale optimization algorithm. Adv. Eng. Softw. 2016, 95, 51–67. [Google Scholar] [CrossRef]
- Mirjalili, S.; Mirjalili, S.M.; Hatamlou, A. Multi-verse optimizer: A nature-inspired algorithm for global optimization. Neural Comput. Appl. 2016, 27, 495–513. [Google Scholar] [CrossRef]
- Mirjalili, S.; Gandomi, A.H.; Mirjalili, S.Z.; Saremi, S.; Faris, H.; Mirjalili, S.M. Salp Swarm Algorithm: A bio-inspired optimizer for engineering design problems. Adv. Eng. Softw. 2017, 114, 163–191. [Google Scholar] [CrossRef]
- Dhiman, G.; Kumar, V. Seagull optimization algorithm: Theory and its applications for large-scale industrial engineering problems. Knowl. Based Syst. 2019, 165, 169–196. [Google Scholar] [CrossRef]
- Yang, X. A new metaheuristic bat-inspired algorithm. In Nature Inspired Cooperative Strategies for Optimization. (NICSO); Springer: Berlin/Heidelberg, Germany, 2011; Volume 284, p. 6574. [Google Scholar]
- Li, A.; Yang, X.; Dong, H.; Xie, Z.; Yang, C. Machine learning-based sensor data modeling methods for power transformer PHM. Sensors 2018, 18, 4430. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Fault Type | CH/CH | CH/H | CH/CH |
|---|---|---|---|
| LT (<150 °C) | <0.1 | 0.1 ∼ 1 | 1 ∼ 3 |
| LT (150–300 °C) | <0.1 | ≥1 | <1 |
| PD | <0.1 | <0.1 | <1 |
| AD | 0.1 ∼ 3 | <1 | NS |
| Dissolved Gas, µL/L | Fault Type | ||
|---|---|---|---|
| CH/CH | CH/H | CH/CH | |
| 0.07143 | 0.54667 | 0.03571 | LT(<150 °C) |
| 0 | 0.17529 | 0 | LT(<150 °C) |
| 0.03846 | 0.8214 | 0.04348 | LT(<150 °C) |
| 0.01583 | 1.68618 | 0.00179 | LT(150–300 °C) |
| 0.01613 | 1.125 | 0.01389 | LT(150–300 °C) |
| 0.01667 | 1.08108 | 0.01563 | LT(150–300 °C) |
| 0.05556 | 0.07524 | 0.05882 | PD |
| 0 | 0.07059 | 0 | PD |
| 0.06667 | 0.06754 | 0.21910 | PD |
| 0.25 | 0.32323 | 0.33333 | AD |
| 0.14844 | 0.07836 | 0.14394 | AD |
| 0.125 | 0.13768 | 0.16667 | AD |
| Fault Type | LT (<150 °C) | LT (150–300 °C) | PD | AD |
|---|---|---|---|---|
| Coding format | 1 | 0 | 0 | 0 |
| 0 | 1 | 0 | 0 | |
| 0 | 0 | 1 | 0 | |
| 0 | 0 | 0 | 1 |
| Methods | Parameters Settings |
|---|---|
| PSO-BP | c1 = c2 = 1.49445, N = 10, T = 50 |
| IGWO-PNN | = 2, = 0, N = 10, T = 50 |
| SOA-PNN | N = 10, T = 50 |
| WOA-PNN | N = 10, T = 50 |
| MVO-PNN | Universes_no = 10, T = 50 |
| SSA-PNN | N = 10, T = 50 |
| GWO-PNN | a was linearly decreased from 2 to 0, N = 10, T = 50 |
| BA-BP | N = 10, T = 50, A = 0.5, r = 0.5 |
| CS-BP | N = 10, T = 50, Pa = 0.25 |
| GA-BP | N = 10, T = 50, Pm = 0.01, Px = 0.7 |
| ELM | HiddenNum = 20, TF = ‘sig’ |
| PNN | Spread = 0.07 |
| Fault Type | Accuracy (%) | |||
|---|---|---|---|---|
| IGWO-PNN | GWO-PNN | PNN | IEC | |
| LT (<150 °C) | 98.84 | 98.84 | 100.00 | 0.28 |
| LT (150–300 °C) | 100.00 | 92.31 | 100.00 | 100.00 |
| PD | 100.00 | 100.00 | 41.67 | 100.00 |
| AD | 100.00 | 94.74 | 94.74 | 100.00 |
| Average | 99.71 | 96.47 | 84.10 | 75.07 |
| Fault Type | Accuracy (%) | ||||
|---|---|---|---|---|---|
| IGWO-PNN | WOA-PNN | SSA-PNN | MVO-PNN | SOA-PNN | |
| LT (<150 °C) | 98.84 | 100.00 | 100.00 | 98.84 | 98.84 |
| LT (150–300 °C) | 100.00 | 100.00 | 100.00 | 100.00 | 100.00 |
| PD | 100.00 | 100.00 | 91.67 | 91.67 | 75.00 |
| AD | 100.00 | 89.47 | 94.74 | 94.74 | 100.00 |
| Average | 99.71 | 97.37 | 96.60 | 96.31 | 93.46 |
| Fault Type | Accuracy (%) | |||||
|---|---|---|---|---|---|---|
| IGWO-PNN | CS-BP | BA-BP | PSO-BP | GA-BP | ELM | |
| LT (<150 °C) | 98.84 | 97.67 | 98.84 | 97.67 | 100.00 | 100.00 |
| LT (150–300 °C) | 100.00 | 100.00 | 92.31 | 92.31 | 92.31 | 100.00 |
| PD | 100.00 | 100.00 | 100.00 | 100.00 | 100.00 | 66.67 |
| AD | 100.00 | 100.00 | 94.74 | 94.74 | 89.47 | 94.74 |
| Average | 99.71 | 99.42 | 96.47 | 96.18 | 95.45 | 90.35 |
| Methods | Marco F1-Score | ||||
|---|---|---|---|---|---|
| LT (<150 °C) | LT (150–300 °C) | PD | AD | Average | |
| IGWO-PNN | 99.42% | 100.00% | 96.30% | 100.00% | 98.93% |
| CS-BP | 98.82% | 100.00% | 92.31% | 97.44% | 97.14% |
| WOA-PNN | 98.88% | 100.00% | 100.00% | 94.44% | 98.33% |
| SSA-PNN | 98.88% | 100.00% | 95.65% | 97.30% | 97.96% |
| GWO-PNN | 98.31% | 96.00% | 100.00% | 95.00% | 97.33% |
| BA-BP | 98.85% | 96.00% | 96.30% | 95.00% | 96.54% |
| MVO-PNN | 98.31% | 100.00% | 95.65% | 95.00% | 97.24% |
| PSO-BP | 98.25% | 96.00% | 93.33% | 95.00% | 95.64% |
| GA-BP | 98.88% | 96.00% | 96.30% | 94.44% | 96.40% |
| SOA-PNN | 97.78% | 100.00% | 85.71% | 97.56% | 95.26% |
| ELM | 97.33% | 96.30% | 84.21% | 97.30% | 93.78% |
| PNN | 95.92% | 100.00% | 58.82% | 97.30% | 88.01% |
| Methods | K-Fold Cross-Validation | |||
|---|---|---|---|---|
| 5-Folds | 10-Fold | 15-Fold | Average | |
| IGWO-PNN | 98.76% | 96.11% | 96.97% | 97.28% |
| CS-BP | 95.88% | 95.94% | 93.25% | 95.02% |
| BA-BP | 93.15% | 94.32% | 89.61% | 92.36% |
| MVO-PNN | 95.60% | 92.91% | 87.85% | 92.12% |
| PSO-BP | 92.14% | 88.25% | 93.27% | 91.22% |
| SSA-PNN | 95.06% | 90.72% | 85.19% | 90.32% |
| SOA-PNN | 92.14% | 87.25% | 86.89% | 88.76% |
| GA-BP | 93.97% | 86.65% | 85.46% | 88.69% |
| GWO-PNN | 94.74% | 85.68% | 84.59% | 88.34% |
| WOA-PNN | 94.18% | 83.54% | 83.24% | 86.99% |
| ELM | 90.71% | 79.04% | 88.50% | 86.08% |
| PNN | 87.87% | 71.25% | 78.74% | 79.29% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhou, Y.; Yang, X.; Tao, L.; Yang, L. Transformer Fault Diagnosis Model Based on Improved Gray Wolf Optimizer and Probabilistic Neural Network. Energies 2021, 14, 3029. https://doi.org/10.3390/en14113029
Zhou Y, Yang X, Tao L, Yang L. Transformer Fault Diagnosis Model Based on Improved Gray Wolf Optimizer and Probabilistic Neural Network. Energies. 2021; 14(11):3029. https://doi.org/10.3390/en14113029
Chicago/Turabian StyleZhou, Yichen, Xiaohui Yang, Lingyu Tao, and Li Yang. 2021. "Transformer Fault Diagnosis Model Based on Improved Gray Wolf Optimizer and Probabilistic Neural Network" Energies 14, no. 11: 3029. https://doi.org/10.3390/en14113029
APA StyleZhou, Y., Yang, X., Tao, L., & Yang, L. (2021). Transformer Fault Diagnosis Model Based on Improved Gray Wolf Optimizer and Probabilistic Neural Network. Energies, 14(11), 3029. https://doi.org/10.3390/en14113029