
REFOS: A Renewable Energy Multi-Purpose Floating Offshore System

 ,
,  ,
,  ,
,  ,
, 
Abstract
:1. Introduction
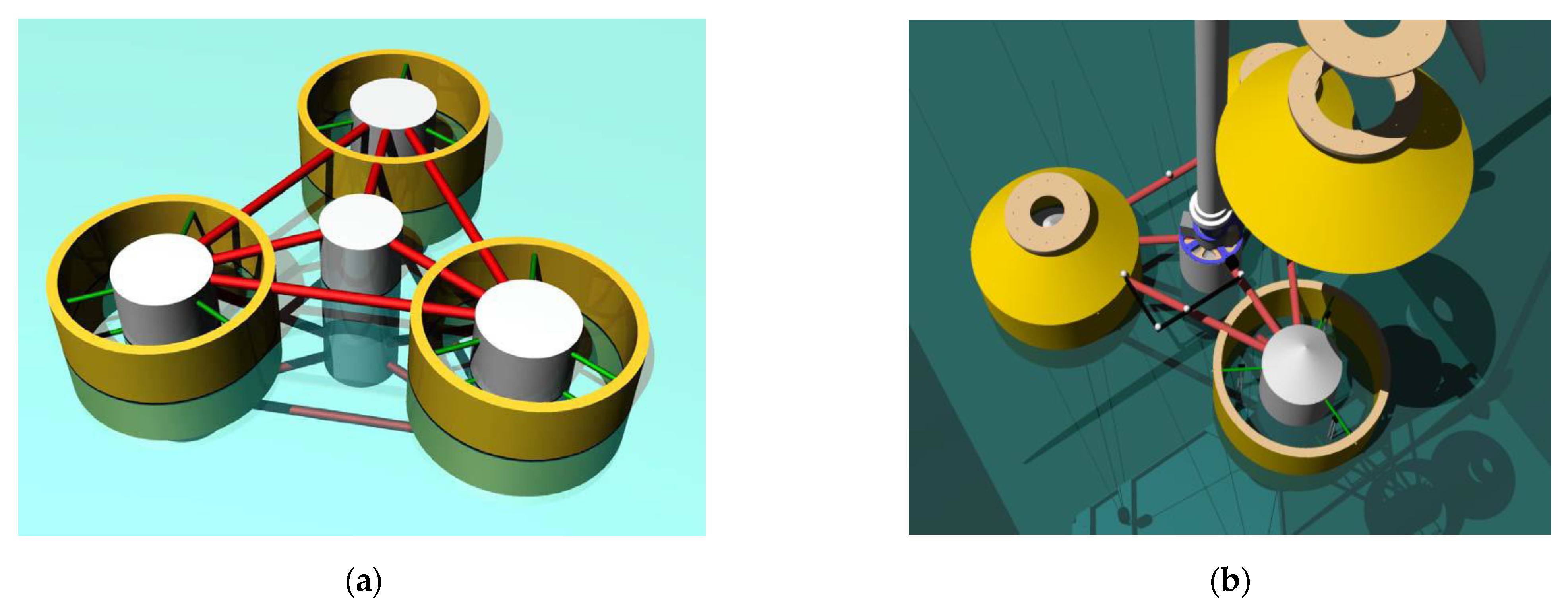
2. Description of the Renewable Energy Multi-Purpose Floating Offshore System (REFOS) Platform
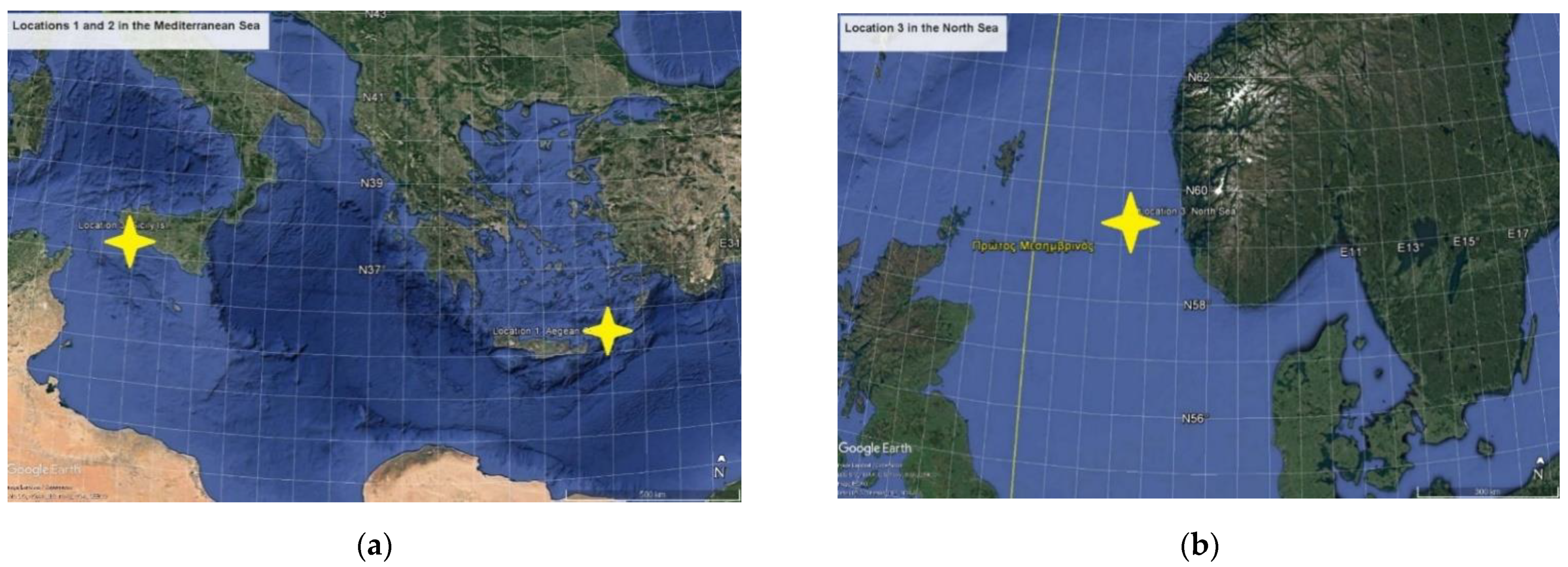
3. Environmental Conditions and Design Values
3.1. Wind and Wave Climate
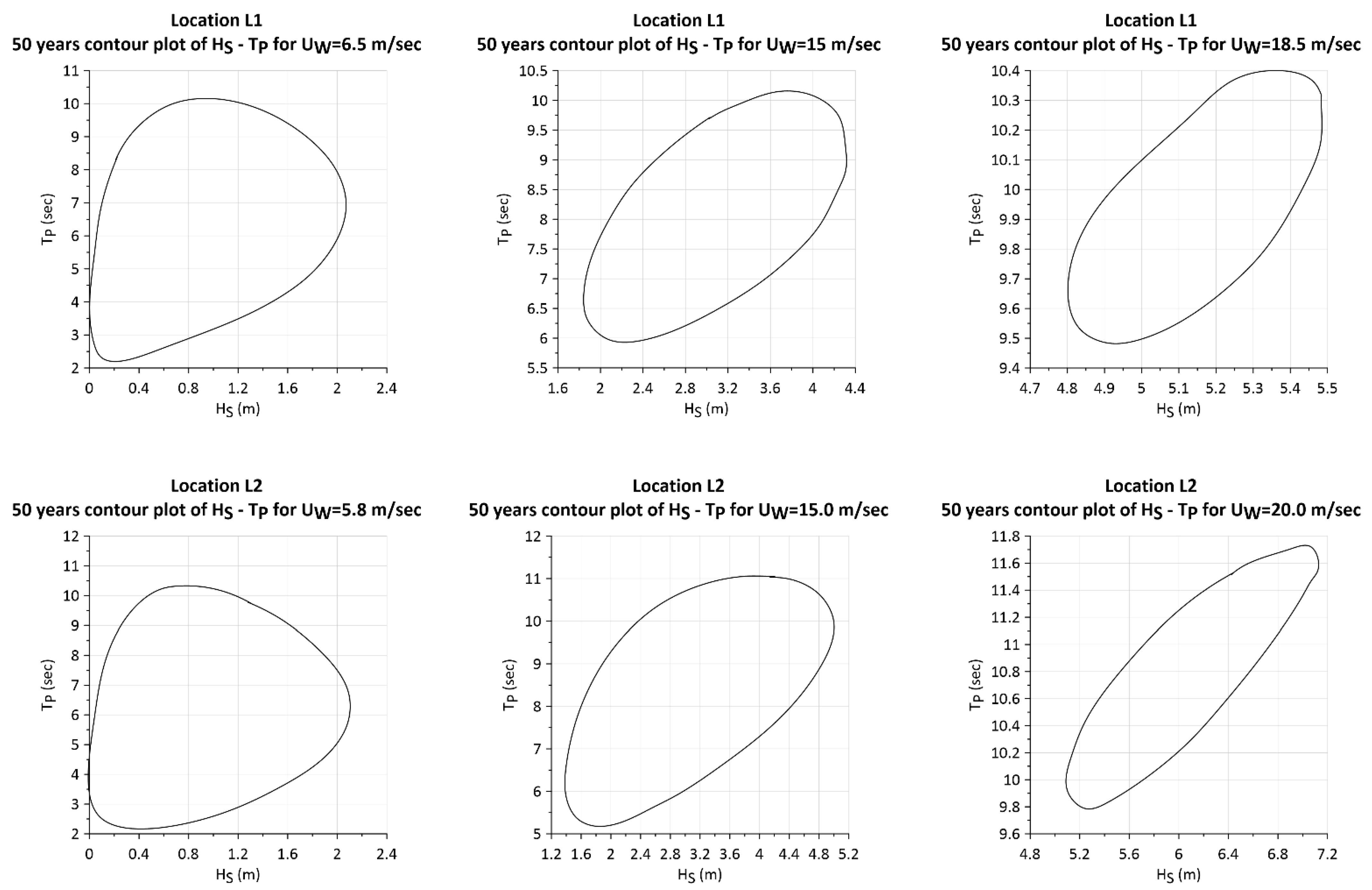
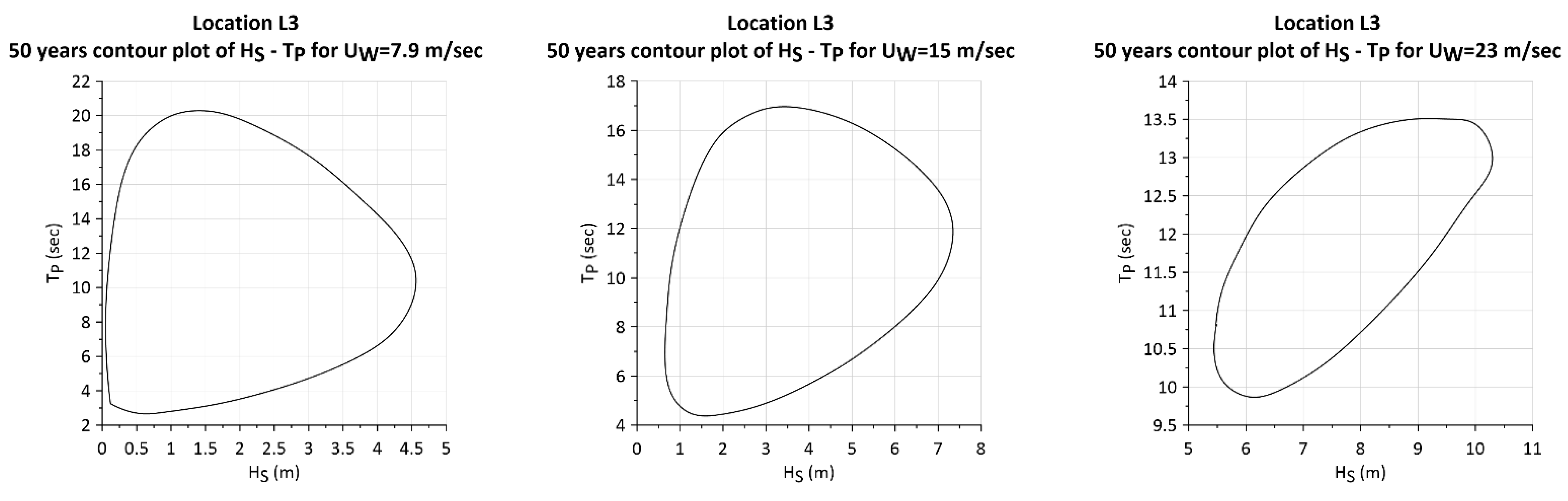
3.2. Extreme Value Analysis of Wind and Sea States
4. Coupled Hydro-Aero-Elastic Formulation
4.1. Formulation of the Hydrodynamic Problem
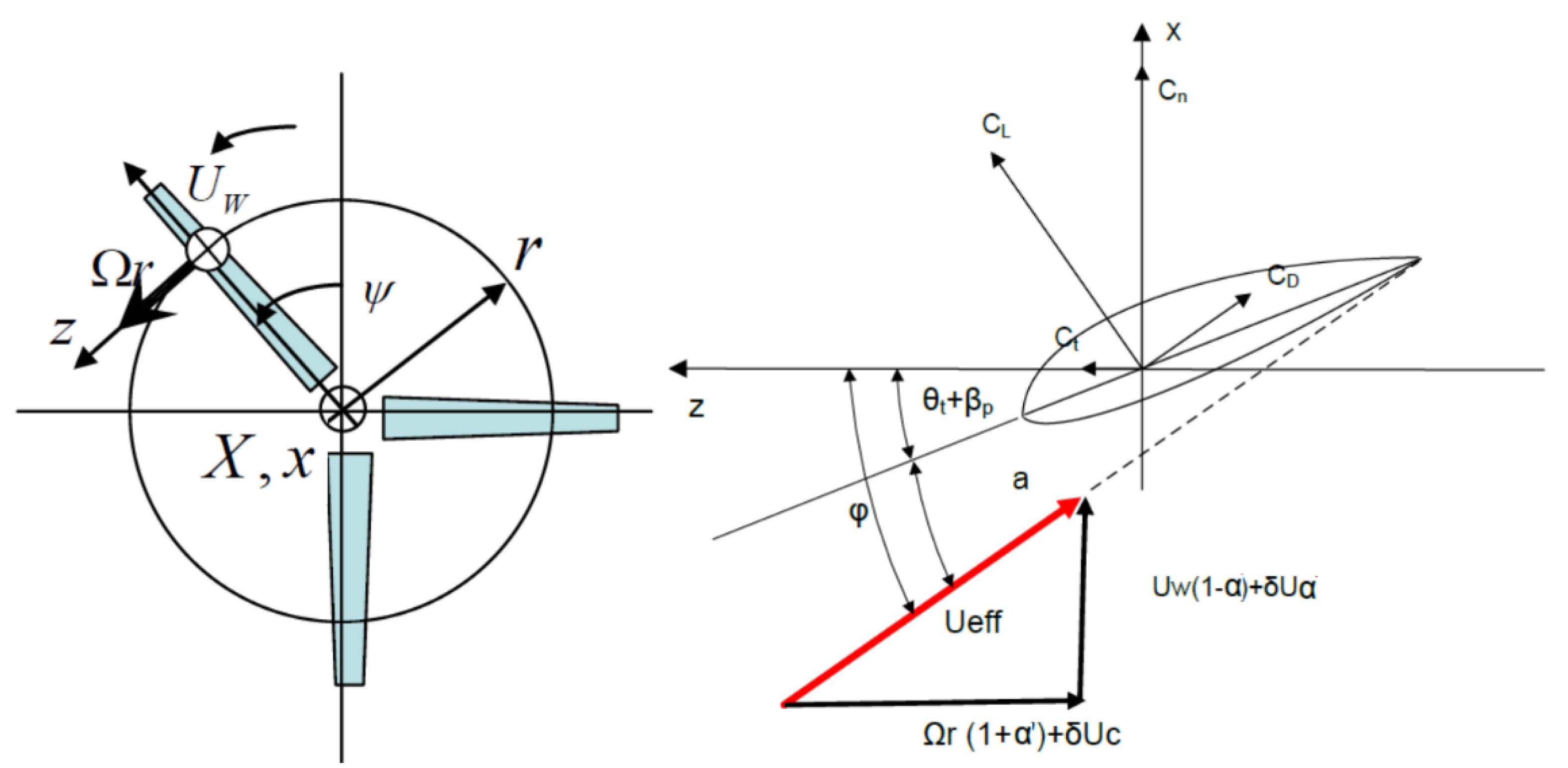
4.2. Formulation of the Aero-Elasto-Dynamic Problem
4.3. Coupled Hydro-Aero-Elastic Formulation
5. Wave Tank Experimental Analysis
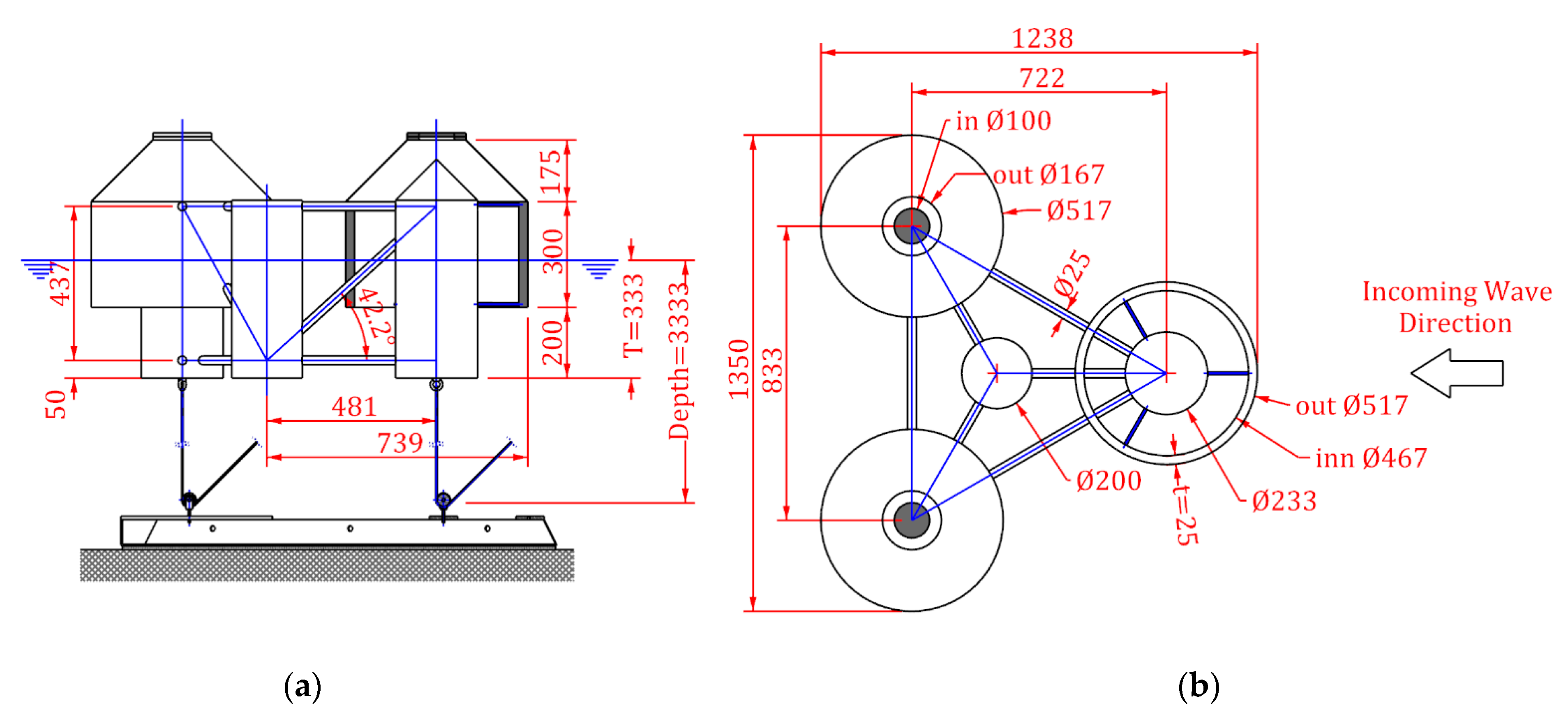
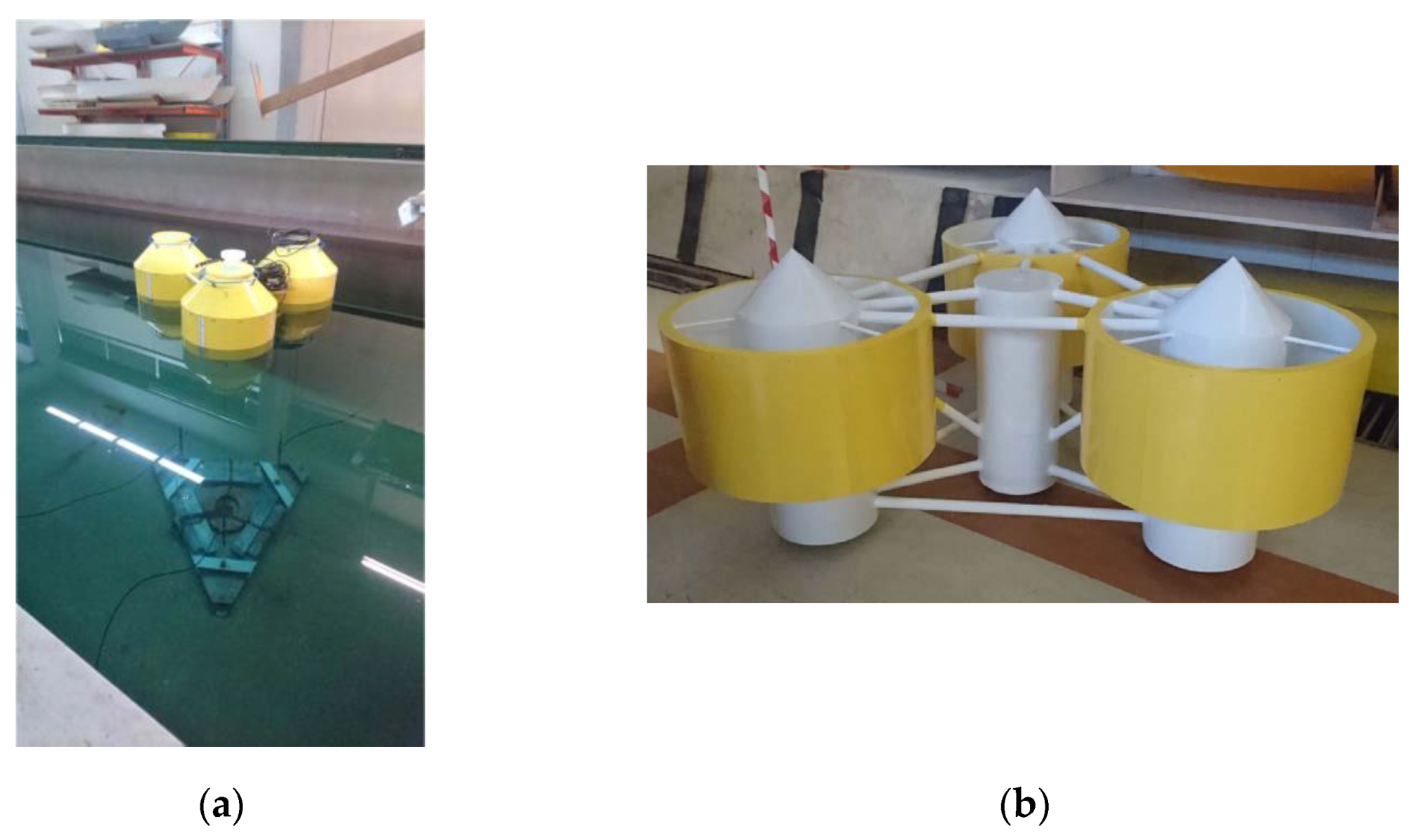
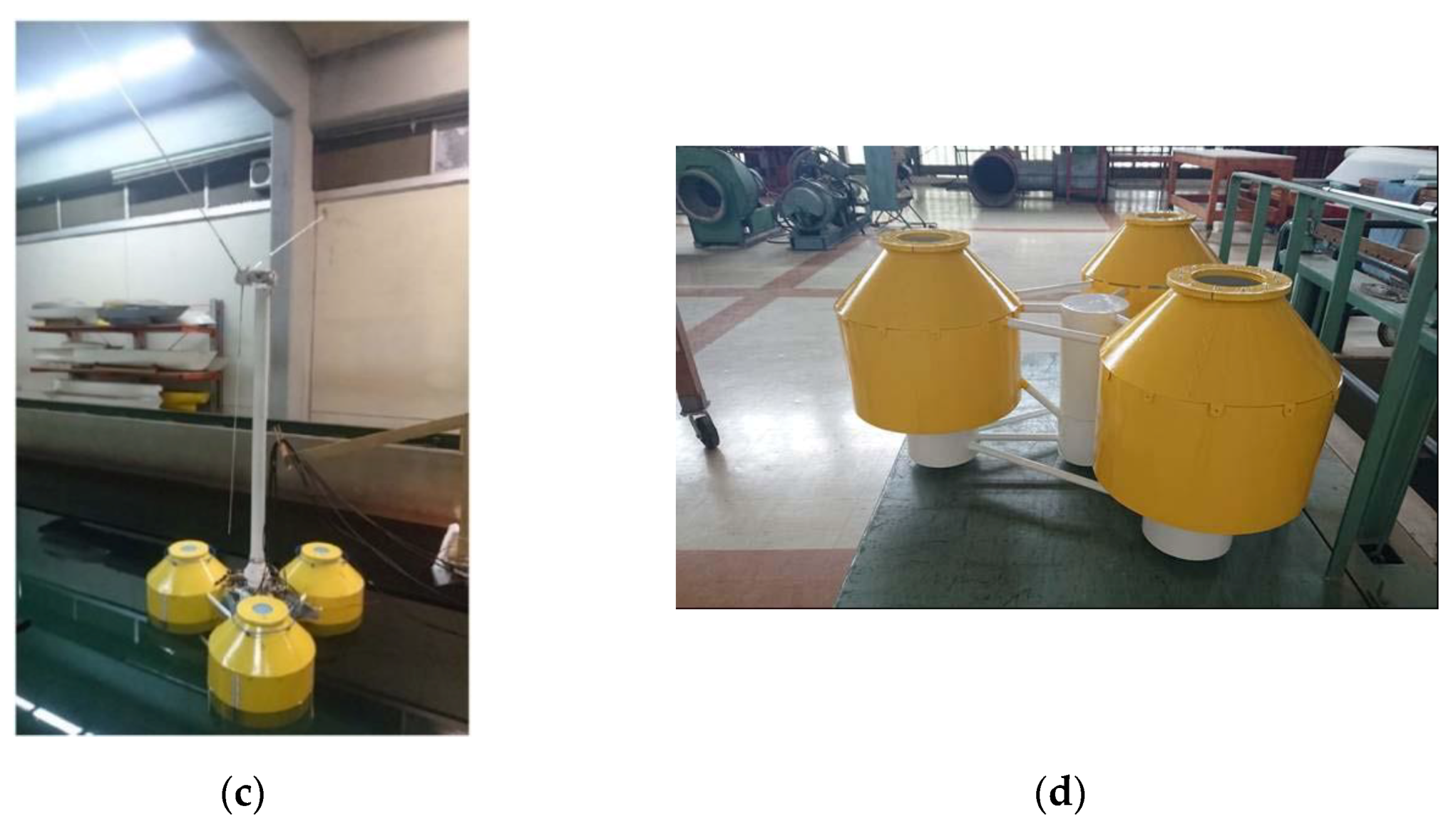
5.1. Model Scale
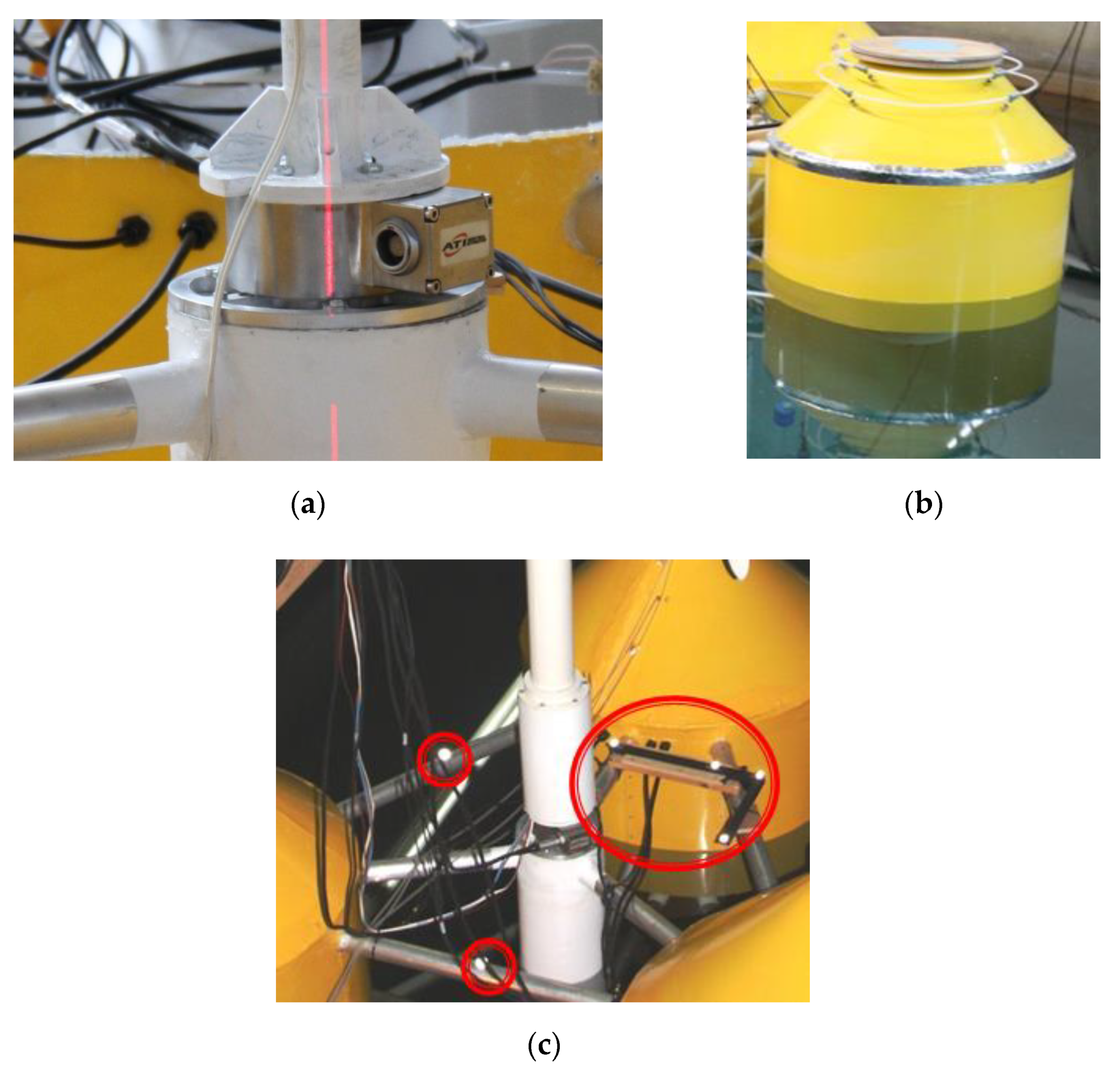
5.2. Instrumentation of the Model
5.3. Validation of the Numerical Models with the Experimental Results
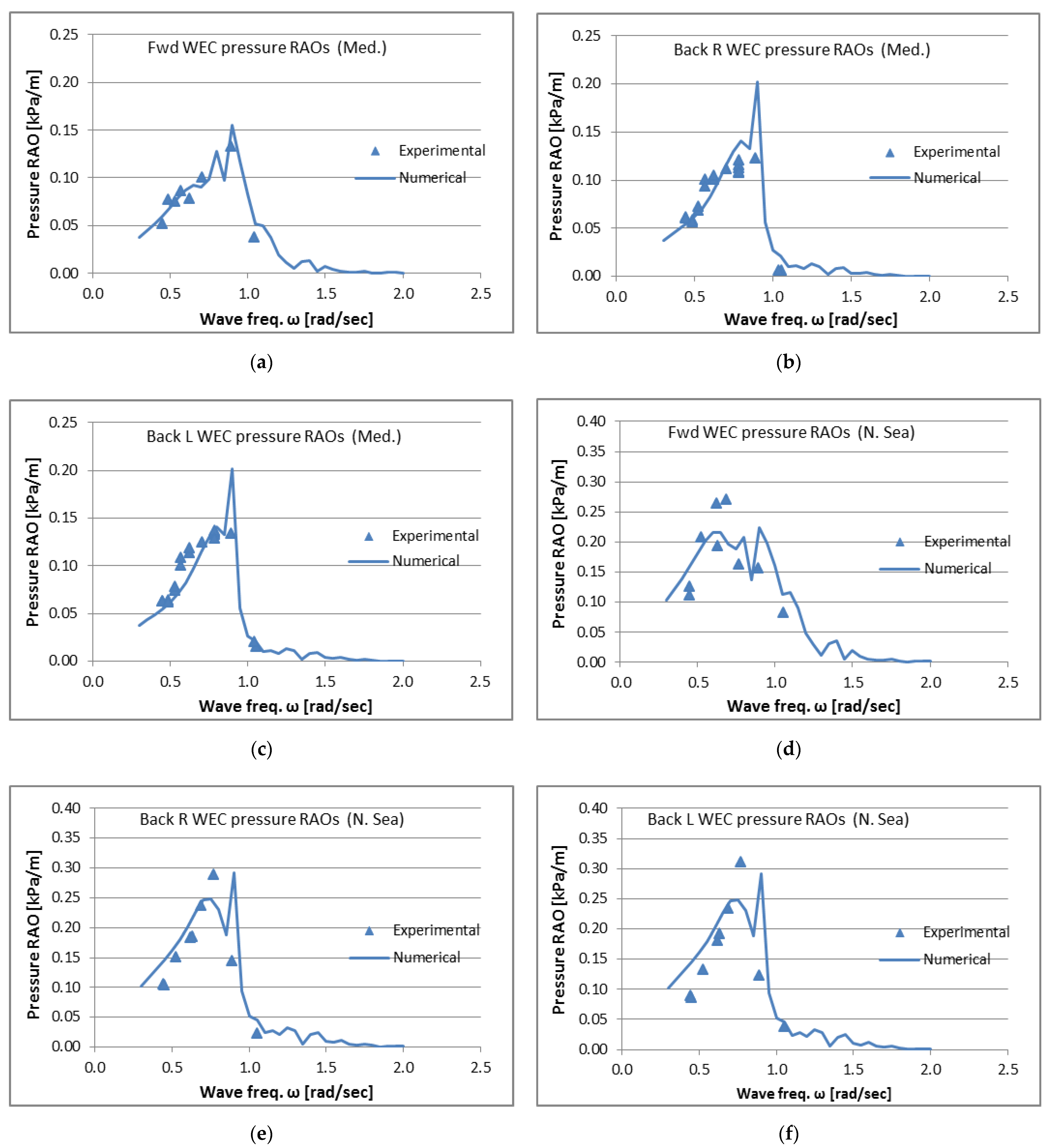
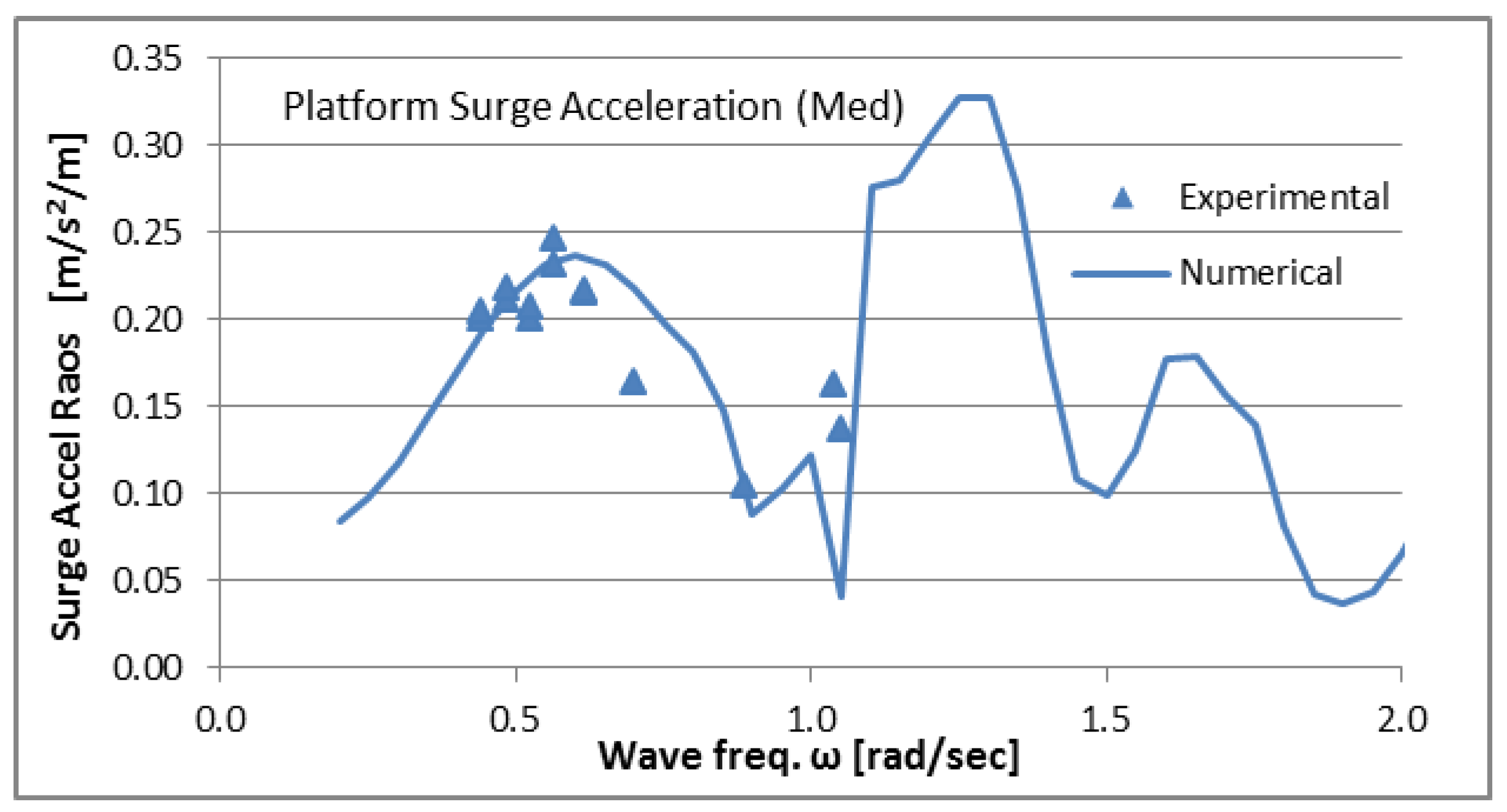
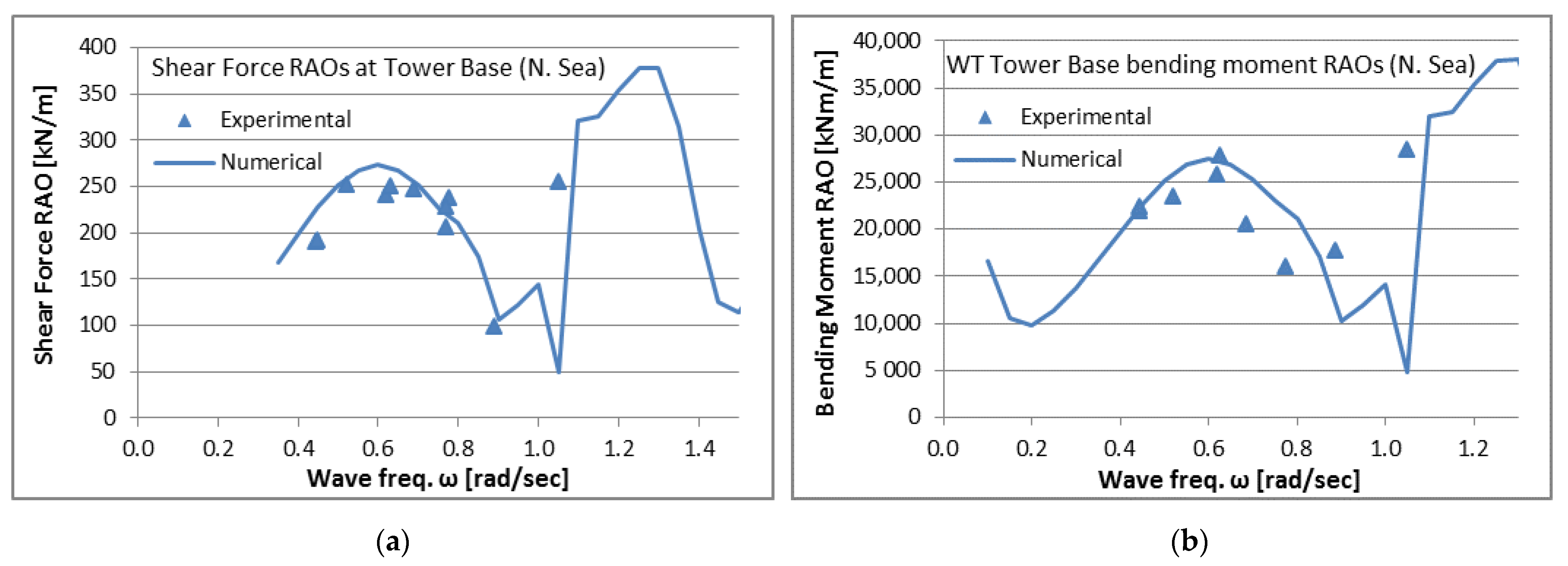
- (a)
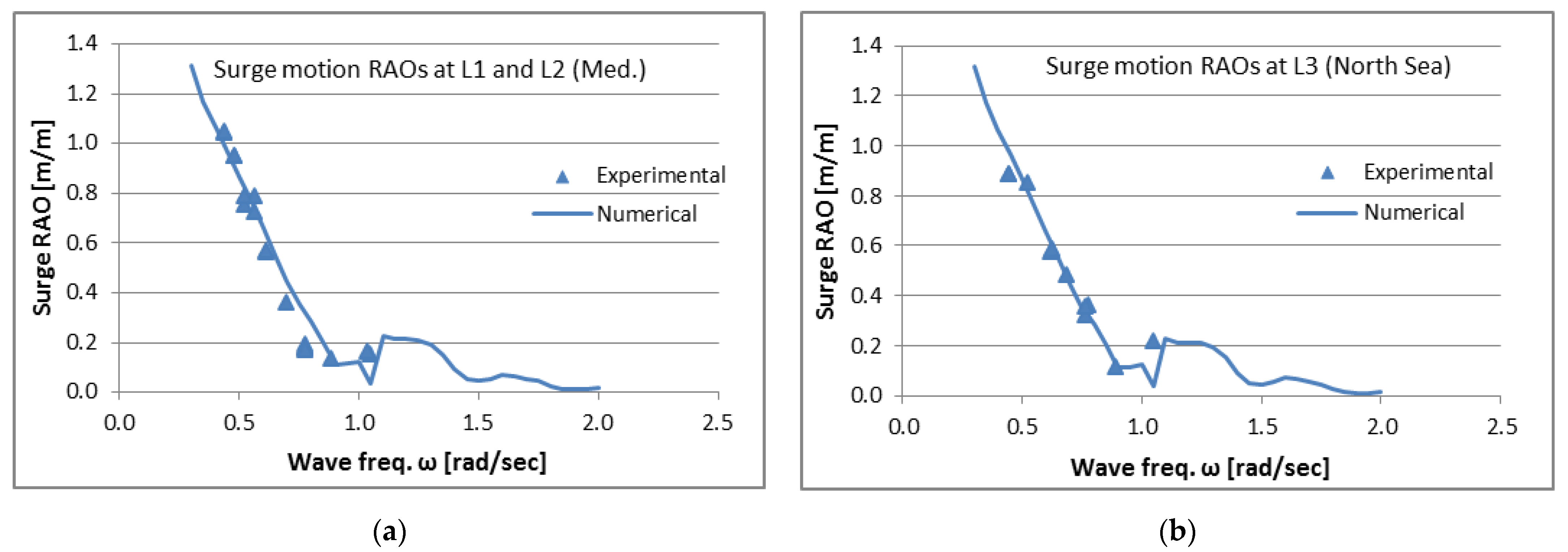
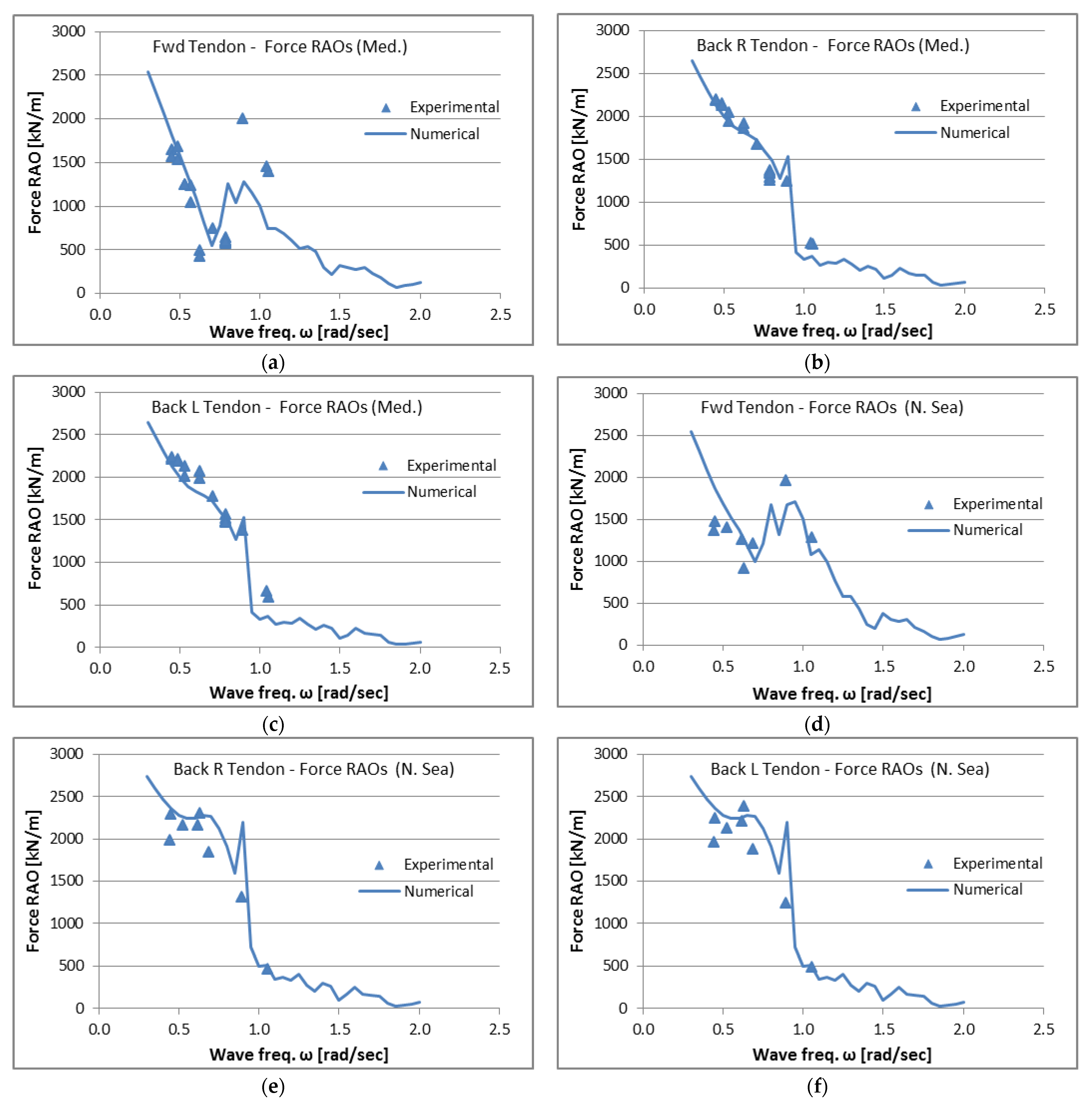
- For the case of the harmonic waves, a wide range of exciting frequencies was examined, and the corresponding response amplitude operators (RAOs) were derived (the sea keeping response of the platform in surge motion; the platform’s accelerations; the dynamic tendon loads; the OWC air chamber pressure and the WT tower base loads). The obtained RAOs were found to be in very good agreement with the numerical hydrodynamic analysis presented herein. This verifies the software tools developed in the context of the project.
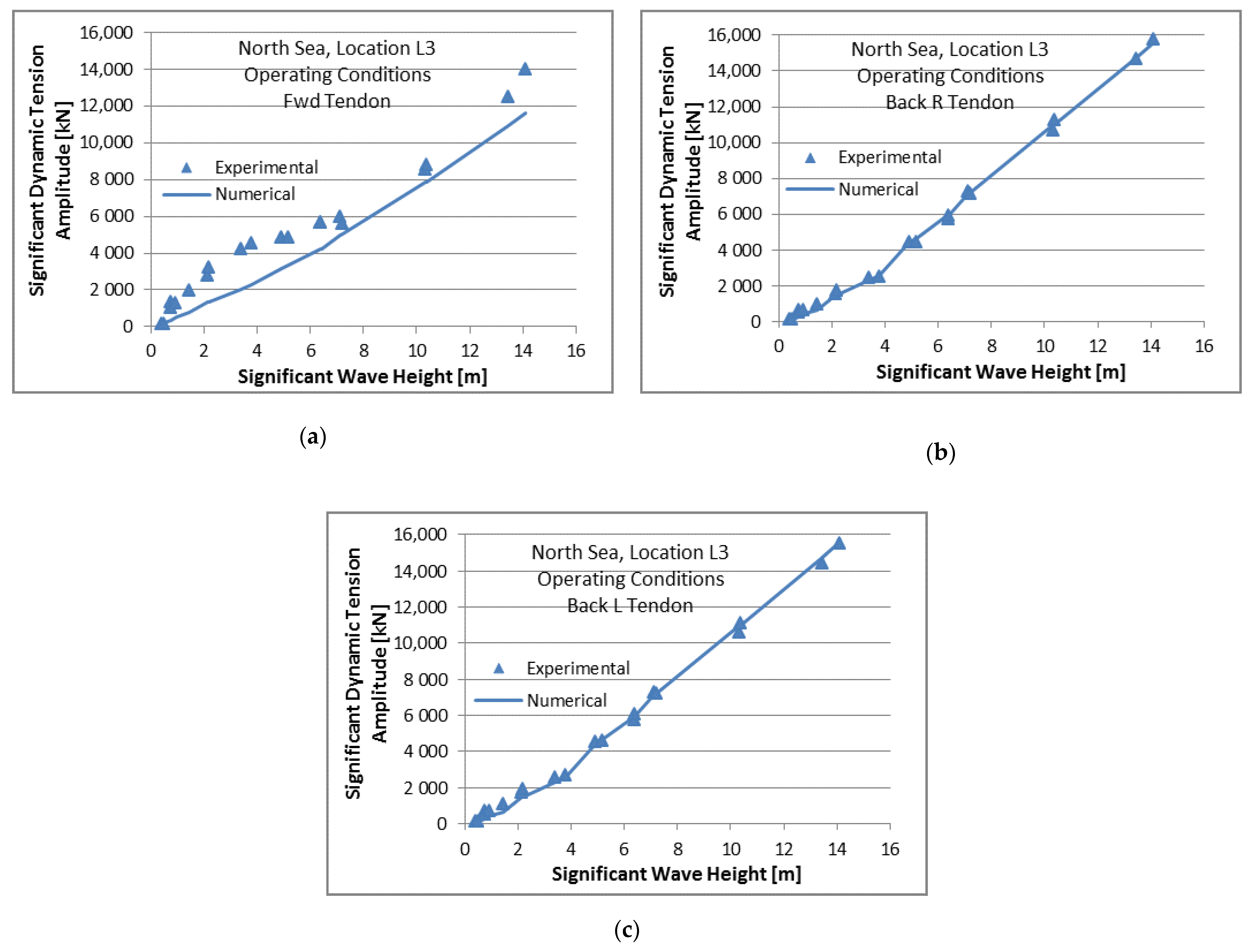
- (b)
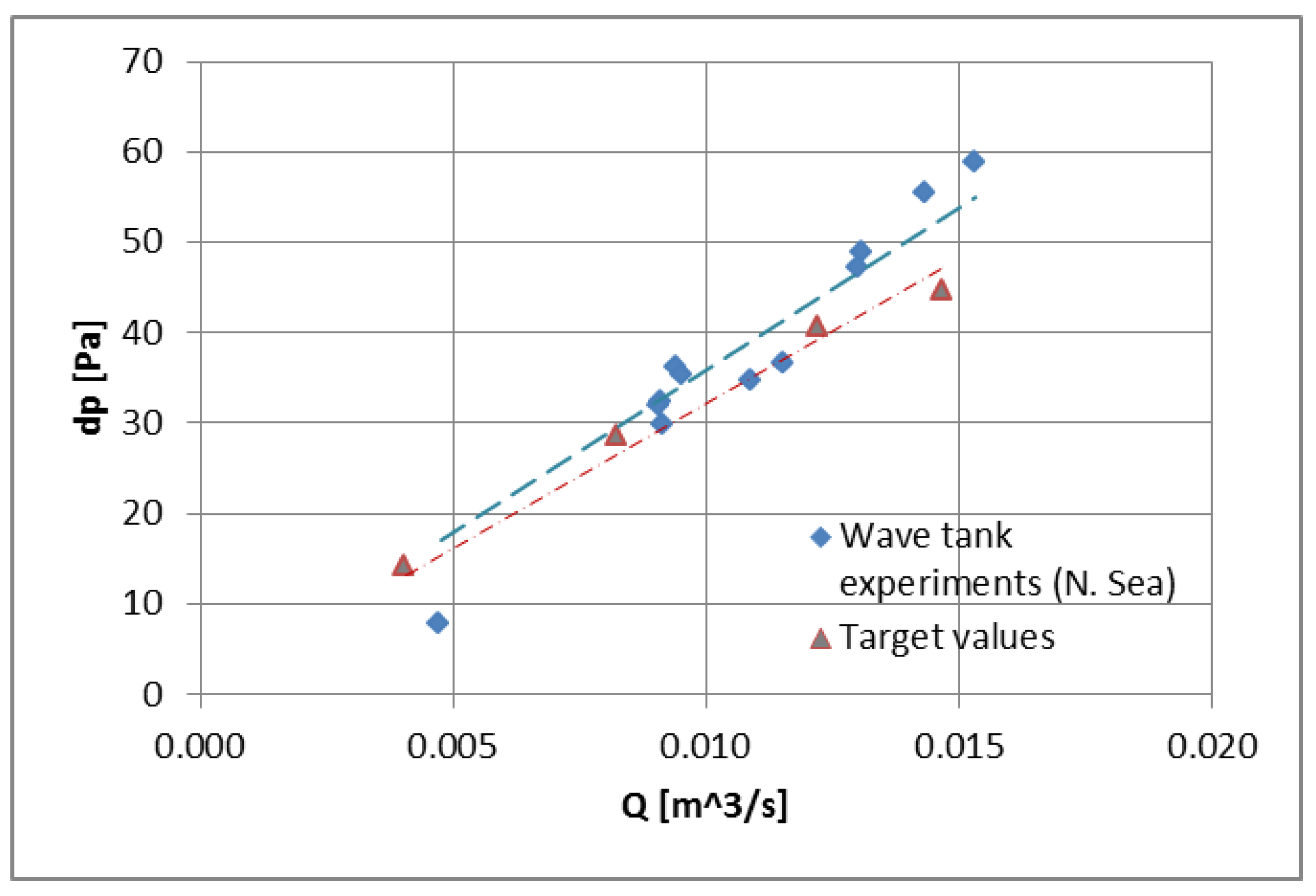
- Following the harmonic waves, irregular sea states were analyzed. A wide range of productive (i.e., permitting the operation of the WT and OWC) sea conditions foreseen for the three REFOS installation locations was experimentally simulated, with the focus being at the performance of the mooring system. The experimental results verified the dynamic loads on the tendons of the mooring system. This is of great importance, considering the critical role of this system, as regards the safety of the platform.
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| TLP | Tension Leg Platform |
| OWC | Oscillating Water Column |
| WT | Wind Turbine |
| LCOE | Levelized Cost of Energy |
| WEC | Wave Energy Converter |
| O&M | Operation & Maintenance |
| DTU | Technical University of Denmark |
| SWL | Sea Water Level |
| CM | Center of Mass |
| OD | Outer Diameter |
| Joint Probability Density Function | |
| cdf | Cumulative Distribution Function |
| MLM | Maximum Likelihood Method |
| dofs | Degrees of Freedom |
| BEM | Blade Element Momentum |
| Fn | Froude Number |
| Re | Reynolds Number |
| LSMH | Laboratory for Ship and Marine Hydrodynamics |
| ITTC | International Towing Tank Conference |
References
- Wind Europe Organization. Key Trends and Statistics 2020; Report. 2020. Available online: http://windeurope.org (accessed on 2 April 2021).
- Wind Europe Organization. Wind Energy in Europe, Scenarios for 2030; Report. 2017. Available online: http://windeurope.org (accessed on 2 April 2021).
- Ocean Energy. Key Trends and Statistics; Report. 2019. Available online: http://oceanenergy-europe.eu (accessed on 2 April 2021).
- Badcock-Broe, A.; Flynn, R.; Sian, G.; Gruet, R.; Medic, N. Wave and Tidal Energy Market Deployment Strategy for Europe, Strategic Initiative for Ocean Energy (SI Ocean). 2014. Available online: http://www.siocean.eu/en/MarketDeployment/Market-Deployment-Strategy/ (accessed on 2 April 2021).
- International Renewable Energy Agency. Renewable Power Generation Costs in 2019; Report. 2019. Available online: http://irena.org (accessed on 2 April 2021).
- Nazir, C.P. Offshore hydroelectric plant: A techno-economic analysis of a renewable energy source. Renew. Sustain. Energy Rev. 2014, 34, 174–184. [Google Scholar] [CrossRef]
- Kuriqi, A.; Pinheiro, A.; Sordo-Ward, A.; Garrote, L. Water-energy-ecosystem nexus: Balancing competing interests at a run-of-river hydropower plant coupling a hydrologic-ecohydraulic approach. Energy Convers. Manag. 2020, 223, 113267. [Google Scholar] [CrossRef]
- Kuriqi, A.; Pinheiro, A.; Sordo-Ward, A.; Bejerano, M.D.; Garrote, L. Ecological impacts of run-of-river hydropower plants—Current status and future prospects on the brink of energy transition. Renew. Sustain. Energy Rev. 2021, 142, 110833. [Google Scholar] [CrossRef]
- Perez-Collazo, C.; Astariz, S.; Abanades, J.; Greaves, D.; Iglesias, G. Co-located Wave and Offshore Wind Farms: A Preliminary Case Study of a Hybrid Array. In Proceedings of the 34th International Conference in Coastal Engineering, Seoul, Korea, 16–20 June 2014; Lynett, P., Ed.; Curran Associates Inc.: New York, NY, USA, 2014. [Google Scholar]
- Pelagic Power AS. 2010. Available online: http://pelagicpower.no (accessed on 2 April 2021).
- DualSub. 2019. Available online: http://marinepowersystems.co.uk/dualsub/ (accessed on 2 April 2021).
- Floating Power Plant. Available online: http://floatingpowerplant.com/ (accessed on 2 April 2021).
- Aubault, A.; Alves, M.; Sarmento, A.; Roddier, D.; Peiffer, A. Modeling of an oscillating water column on the floating foundation WINDFLOAT. In Proceedings of the ASME 2011 30th International Conference on Ocean, Offshore and Arctic Engineering, Rotterdam, The Netherlands, 19–24 June 2011. [Google Scholar]
- Mazarakos, T.P.; Konispoliatis, D.N.; Katsaounis, G.; Polyzos, P.; Manolas, D.; Voutsinas, S.; Mavrakos, S.A. Numerical and experimental studies of an offshore multi-purpose floating structure supporting a wind turbine. In Proceedings of the 12th European Wave & Tidal Energy Conference, Cork, Ireland, 27 August–1 September 2017. [Google Scholar]
- Mazarakos, T.; Konispoliatis, D.; Katsaounis, G.; Polyzos, S.; Manolas, D.; Voutsinas, S.; Soukissian, T.; Mavrakos, S. Numerical and experimental studies of a multi-purpose floating TLP structure for combined wind and wave energy exploitation. Mediterr. Mar. Sci. 2019, 20, 745–763. [Google Scholar] [CrossRef] [Green Version]
- Katsaounis, G.M.; Polyzos, S.; Mavrakos, S.A. An Experimental Study of the Hydrodynamic Behavior of a TLP Platform for a 5MW Wind Turbine with OWC Devices. In Proceedings of the VII International Conference on Computational Methods in Marine Engineering, Nantes, France, 15–17 May 2017. [Google Scholar]
- Mazarakos, T.; Konispoliatis, D.; Manolas, D.; Voutsinas, S.; Mavrakos, S. Modelling of an offshore multi-purpose floating structure supporting a wind turbine including second-order wave loads. In Proceedings of the 11th European Wave & Tidal Energy Conference, Nantes, France, 7–10 September 2015. [Google Scholar]
- Mazarakos, T.; Konispoliatis, D.; Mavrakos, S. Parametric hydrodynamic analysis of a moored floating structure for combined wind and wave energy exploitation. In Proceedings of the 12th International Conference on Hydrodynamics, Egmond aan Zee, The Netherlands, 18–23 September 2016. [Google Scholar]
- Sarmiento, J.; Iturrioz, A.; Ayllón, V.; Guanche, R.; Losada, I.J. Experimental modelling of a multi-use floating platform for wave and wind energy harvesting. Ocean Eng. 2019, 173, 761–773. [Google Scholar] [CrossRef]
- Perez-Collazo, C.; Greaves, D.; Iglesias, G. A novel hybrid wind-wave energy converter for jacket-frame substructures. Energies 2018, 11, 637. [Google Scholar] [CrossRef] [Green Version]
- Perez-Collazo, C.; Pemberton, R.; Greaves, D.; Iglesias, G. Monopile-mounted wave energy converter for a hybrid wind-wave system. Energy Convers. Manag. 2019, 199, 111971. [Google Scholar] [CrossRef]
- Michele, S.; Renzi, E.; Perez-Collazo, C.; Greaves, D.; Iglesias, G. Power extraction in regular and random waves from an OWC in hybrid wind-wave energy systems. Ocean Eng. 2019, 191, 106519. [Google Scholar] [CrossRef]
- Zhou, Y.; Ning, D.; Shi, W.; Johanning, L.; Liang, D. Hydrodynamic investigation on an OWC wave energy converter integrated into an offshore wind turbine monopile. Coast. Eng. 2020, 162, 103731. [Google Scholar] [CrossRef]
- Cong, P.; Teng, B.; Bai, W.; Ning, D.; Liu, Y. Wave power absorption by an oscillating water column (OWC) device of annular cross-section in a combined wind-wave energy system. Appl. Ocean Res. 2021, 107, 102499. [Google Scholar] [CrossRef]
- Bak, C.; Zahle, F.; Bitsche, R.; Kim, T.; Yde, A.; Henriksen, L.C.; Natarajan, A.; Hansen, M.H. Description of the DTU 10MW Reference Wind Turbine; DTU. Wind Energy Report-I-0092; DTU Wind Energy: Roskilde, Denmark, 2013. [Google Scholar]
- Falnes, J. Ocean Waves and Oscillating Systems; Cambridge University Press: Cambridge, UK; New York, NY, USA, 2002. [Google Scholar]
- Martins-rivas, H.; Mei, C.C. Wave power extraction from an oscillating water column along a straight coast. Ocean Eng. 2009, 36, 426–433. [Google Scholar] [CrossRef]
- Evans, D.V.; Porter, R. Efficient calculation of hydrodynamic properties of OWC-type devices. J. Offshore Mech. Arct. Eng. 1997, 119, 210–218. [Google Scholar] [CrossRef]
- Konispoliatis, D.; Mazarakos, T.; Katsidoniotaki, E.; Vamiadakis, A.; Soukissian, T.; Mavrakos, S. Efficiency of an array of OWC devices equipped with air turbines with pitch control. In Proceedings of the 13th European Wave & Tidal Energy Conference, Napoli, Italy, 1–6 September 2019. [Google Scholar]
- European Centre for Medium-Range Weather Forecasts. Updated Daily. ERA-20C Project (ECMWF Atmospheric Reanalysis of the 20th Century). Research Data Archive at the National Center for Atmospheric Research, Computational and Information Systems Laboratory. 2014. Available online: http://dx.doi.org/10.5065/D6VQ30QG (accessed on 2 April 2021).
- Poli, P.; Hersbach, H.; Dee, D.P.; Berrisford, P.; Simmons, A.J.; Vitart, F.; Laloyaux, P.; Tan, D.G.H.; Peubey, C.; Thépaut, J.; et al. ERA-20C: An Atmospheric Reanalysis of the Twentieth Century. J. Clim. 2016, 29, 4083–4097. [Google Scholar] [CrossRef]
- Coles, S. An Introduction to Statistical Modeling of Extreme Values; Springer: Berlin/Heidelberg, Germany, 2001. [Google Scholar]
- Soukissian, T.H.; Kalantzi, G. Extreme value analysis methods used for wave prediction. In Proceedings of the 16th International Offshore and Polar Engineering Conference, San Francisco, CA, USA, 28 May–2 June 2006. [Google Scholar]
- Soukissian, T.H.; Kalantzi, G. A new method for applying the r-largest maxima model for design sea-state prediction. Int. J. Offshore Polar Eng. 2009, 19, 176–182. [Google Scholar]
- Soukissian, T.H.; Tsalis, C. The effect of the generalized extreme value distribution parameter estimation methods in extreme wind speed prediction. Nat. Hazards Earth System Sci. 2015, 78, 1777–1809. [Google Scholar] [CrossRef]
- Jonathan, P.; Ewans, K.; Forristall, G. Statistical estimation of extreme ocean environments: The requirement for modelling directionality and other covariate effects. Ocean Eng. 2008, 35, 1211–1225. [Google Scholar] [CrossRef]
- Soukissian, T.H. Probabilistic modeling of directional and linear characteristics of wind and sea states. Ocean Eng. 2014, 91, 91–110. [Google Scholar] [CrossRef]
- Karathanasi, F.; Soukissian, T.; Belibassakis, K. Directional Extreme Value Models in Wave Energy Applications. Atmosphere 2020, 11, 274. [Google Scholar] [CrossRef] [Green Version]
- Vanem, E. 3-dimensional environmental contours based on a direct sampling method for structural reliability analysis of ships and offshore structures. Ships Offshore Struct. 2019, 14, 74–85. [Google Scholar] [CrossRef]
- Vanem, E. A comparison study on the estimation of extreme structural response from different environmental contour methods. Mar. Struct. 2017, 56, 137–162. [Google Scholar] [CrossRef]
- Rosenblatt, M. Remarks on a multivariate transformation. Ann. Math. Statist. 1952, 23, 470–472. [Google Scholar] [CrossRef]
- Cheng, P.W.; van Bussel, G.J.W.; van Kuik, G.A.M.; Vugts, J.H. Reliability-based Design Methods to Determine the Extreme Response Distribution of Offshore Wind Turbines. Wind Energy 2003, 6, 1–22. [Google Scholar] [CrossRef]
- Baarholm, G.S.; Haver, S.; Økland, O.D. Combining contours of significant wave height and peak period with platform response distributions for predicting design response. Mar. Struct. 2010, 23, 147–163. [Google Scholar] [CrossRef]
- Yang, X.; Chang, Q. Joint probability distribution of winds and waves from wave simulation of 20 years (1989–2008) in Bohai Bay. Water Sci. Eng. 2013, 6, 296–307. [Google Scholar]
- Li, L.; Gao, Z.; Moan, T. Joint environmental data at five European offshore sites for design of combined wind and wave energy devices. In Proceedings of the 32nd International Conference on Ocean, Offshore and Arctic Engineering, OMAE2013-10156, Nantes, France, 9–14 June 2013. [Google Scholar]
- Konispoliatis, D.; Mavrakos, S. Hydrodynamic analysis of an array of interaction free-floating oscillating water column devices. Ocean Eng. 2016, 111, 179–197. [Google Scholar] [CrossRef]
- Konispoliatis, D.; Mazarakos, T.; Mavrakos, S. Hydrodynamic analysis of three-unit arrays of floating annular oscillating-water-column wave energy converters. Appl. Ocean Res. 2016, 61, 42–64. [Google Scholar] [CrossRef]
- Mavrakos, S.A.; Koumoutsakos, P. Hydrodynamic interaction among vertical axisymmetric bodies restrained in waves. Appl. Ocean Res. 1987, 9, 128–140. [Google Scholar] [CrossRef]
- Mavrakos, S. Hydrodynamic coefficients for groups of interacting vertical axisymmetric bodies. Ocean Eng. 1991, 18, 485–515. [Google Scholar] [CrossRef]
- Konispoliatis, D.; Mavrakos, S.; Soukissian, T. Efficiency of an array of oscillating water column devices for wave energy absorption in the Mediterranean Sea. In Proceedings of the 12th Panhellenic Symposium of Oceanography and Fisheries, Corfu, Greece, 30 May–3 June 2018. [Google Scholar]
- Konispoliatis, D.; Mazarakos, T.; Soukissian, T.; Mavrakos, S. REFOS: A multi-purpose floating platform suitable for wind and wave energy exploitation. In Proceedings of the 11th International Conference on Deregulated Electricity Market Issues in South Eastern Europe (DEMSEE 2018), Nicosia, Cyprus, 20–21 September 2018. [Google Scholar]
- Riziotis, V.A.; Voutsinas, S.G. GAST: A general aero-dynamic and structural prediction tool for wind turbines. In Proceedings of the European Wind Energy Conference, Dublín, Ireland, 6–9 October 1997. [Google Scholar]
- Manolas, D.I.; Riziotis, V.A.; Voutsinas, S.G. Assessing the importance of geometric non-linear effects in the prediction of wind turbine blade loads. Comput. Nonlinear Dyn. J. 2014, 10, 041008. [Google Scholar] [CrossRef]
- Coleman, R.P. Theory of Self-Excited Mechanical Oscillations of Hinged Rotor Blades; Technical Report NACA-WR-L-308, Langley Research Center. 1943. Available online: http://ntrs.nasa.gov (accessed on 2 April 2021).
- Senjanovic, I.; Hadzic, N.; Tomic, M. On the linear stiffness of tension leg platforms. Sustain. Mar. Trans. Exp. Sea Res. 2011, 108, 1081–1088. [Google Scholar]
- Mavrakos, S. User’s Manual for the Software HAMVAB; School of Naval Architecture and Marine Engineering, Laboratory for Floating Structures and Mooring Systems: Athens, Greece, 1995. [Google Scholar]
- Moñino, A.; Medina-López, E.; Clavero, M.; Benslimane, S. Numerical simulation of a simple OWC problem for turbine performance. Int. J. Mar. Energy 2017, 20, 17–32. [Google Scholar] [CrossRef]
- Falcão, A.F.; Henriques, J.C. Model-prototype similarity of oscillating water column wave energy converters. Int. J. Mar. Energy 2014, 6, 18–34. [Google Scholar] [CrossRef]
- Falcão, A.F.; Justino, P.A.P. OWC wave energy devices with air flow control. Ocean Eng. 1999, 26, 1275–1295. [Google Scholar] [CrossRef]
- Moñino, A.; Quiros, C.; Mengibar, F.; Medina-Lopez, E.; Clavero, M. Thermodynamics of the OWC chamber: Experimental turbine performance under stationary flow. Renew. Energy 2020, 155, 317–329. [Google Scholar] [CrossRef]
- Howe, D.; Nader, J.R.; Macfarlane, G. Experimental analysis of the effects of air compressibility in OWC model testing. In Proceedings of the 4th Asian wave and tidal energy conference, Taipei, Taiwan, 9–13 September 2018. [Google Scholar]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Oscillating Water Column (OWC) Devices | |
| Diameter of inner concentric cylindrical body | 14.00 m |
| Draught of inner concentric cylindrical body | 20.00 m |
| Oscillating chamber thickness of each chamber | 1.500 m |
| Outer radius of the oscillating chamber of each device | 15.50 m |
| Oscillating chamber’s draught | 8.000 m |
| Spacing between columns (distance from the center of the bodies) | 50.00 m |
| Elevation of offset columns above SWL | 10.00 m |
| Central cylindrical body supporting WT | |
| Diameter of main column | 12.00 m |
| Draught of main column | 20.00 m |
| Elevation of main column (tower base) above SWL | 10.00 m |
| Depth of platform base below SWL (total draught) | 20.00 m |
| Diameter of pontoons and cross braces | 1.600 m |
| Mass of the Floater | |
| Mass of each oscillating chamber (including ballast) | 1140 t |
| Mass of each concentric cylindrical body | 828 t |
| Mass of the central cylindrical body (including ballast) | 1218.5 t |
| Mass of braces | 408.6 t |
| Total mass of the floater | 7531.1 t |
| Mass of the WT | |
| Mass of the 10 MW WT | 1100.0 t |
| Mass of the air turbine | |
| Mass of each air turbine (including generator) | 3.3 t |
| Mass of the mooring system | |
| Mass of each mooring tendon in water (3 tendon pipes) | 192 t |
| Total mass of the REFOS platform | 9550 t |
| Center of mass (CM) location below SWL | 3.180 m |
| Center of buoyancy below SWL | 8.651 m |
| Platform roll inertia about CM | 6.385 × 106 tm2 |
| Platform pitch inertia about CM | 6.385 × 106 tm2 |
| Platform yaw inertia about CM | 1.170 × 107 tm2 |
| Number of tendons | 3 |
| Depth to anchors below SWL (Water depth) | 180 m |
| Depth to fairleads below SWL | 20 m |
| Mooring line length | 160 m |
| Tendon outer diameter (OD) | 1.2192 m |
| Tendon wall | 0.0422 m |
| Equivalent mooring line mass density | 104 kg/m |
| Equivalent mooring line mass in water | 888.6 N/m |
| Mooring line stiffness kxx of each tendon | 104.0 kN/m |
| Mooring line stiffness kzz of each tendon | 173,533 kN/m |
| Pretension of each tendon | 18,838 kN |
| Yeung’s modulus of elasticity | 200 GPa |
| Yield stress | 482.5 MPa |
| Location L1 | ||||||||
| [m] | 90,584 | 0.948 | 0.061 | 5.387 | 0.602 | 63.453 | 1.548 | 3.499 |
| [s] | 90,584 | 5.466 | 2.43 | 11.176 | 1.106 | 20.235 | 0.537 | 0.464 |
| [m/s] | 90,584 | 6.495 | 2 | 18.624 | 2.661 | 40.971 | 0.534 | 0.076 |
| Location L2 | ||||||||
| [m] | 90,584 | 0.864 | 0.024 | 6.49 | 0.715 | 82.809 | 1.835 | 4.7 |
| [s] | 90,584 | 5.37 | 2.43 | 11.066 | 1.438 | 26.847 | 0.571 | −0.051 |
| [m/s] | 90,584 | 5.834 | 2 | 20.133 | 3.01 | 51.591 | 0.791 | 0.194 |
| Location L3 | ||||||||
| [m] | 90,584 | 1.999 | 0.175 | 9.774 | 1.184 | 59.237 | 1.292 | 2.126 |
| [s] | 90,584 | 8.417 | 3.415 | 1.875 | 2.017 | 23.962 | 0.508 | 0.013 |
| [m/s] | 90,584 | 7.856 | 2 | 23.196 | 3.589 | 45.68 | 0.465 | −0.333 |
| Condition | Parameter | L1 | L2 | L3 |
|---|---|---|---|---|
| Conditions with maximum | (m/s) | 18.82 | 21.80 | 25.44 |
| (m) | 5.44 | 7.46 | 10.34 | |
| (s) | 10.20 | 11.88 | 13.56 | |
| Conditions with maximum | (m/s) | 18.76 | 21.52 | 25.36 |
| (m) | 5.48 | 7.50 | 10.36 | |
| (s) | 10.28 | 11.90 | 13.56 |
| 312 | 0 | 0 | 0 | −6240 | 0 |
| 0 | 312 | 0 | 6240 | 0 | 0 |
| 0 | 0 | 530,573.4 | 0 | 0 | 0 |
| 0 | 6240 | 0 | 2.214 × 108 | 0 | 0 |
| −6240 | 0 | 0 | 0 | 2.214 × 108 | 0 |
| 0 | 0 | 0 | 0 | 0 | 259,992.4 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Konispoliatis, D.N.; Katsaounis, G.M.; Manolas, D.I.; Soukissian, T.H.; Polyzos, S.; Mazarakos, T.P.; Voutsinas, S.G.; Mavrakos, S.A. REFOS: A Renewable Energy Multi-Purpose Floating Offshore System. Energies 2021, 14, 3126. https://doi.org/10.3390/en14113126
Konispoliatis DN, Katsaounis GM, Manolas DI, Soukissian TH, Polyzos S, Mazarakos TP, Voutsinas SG, Mavrakos SA. REFOS: A Renewable Energy Multi-Purpose Floating Offshore System. Energies. 2021; 14(11):3126. https://doi.org/10.3390/en14113126
Chicago/Turabian StyleKonispoliatis, Dimitrios N., Georgios M. Katsaounis, Dimitrios I. Manolas, Takvor H. Soukissian, Stylianos Polyzos, Thomas P. Mazarakos, Spyros G. Voutsinas, and Spyridon A. Mavrakos. 2021. "REFOS: A Renewable Energy Multi-Purpose Floating Offshore System" Energies 14, no. 11: 3126. https://doi.org/10.3390/en14113126
APA StyleKonispoliatis, D. N., Katsaounis, G. M., Manolas, D. I., Soukissian, T. H., Polyzos, S., Mazarakos, T. P., Voutsinas, S. G., & Mavrakos, S. A. (2021). REFOS: A Renewable Energy Multi-Purpose Floating Offshore System. Energies, 14(11), 3126. https://doi.org/10.3390/en14113126