
A Data Driven RUL Estimation Framework of Electric Motor Using Deep Electrical Feature Learning from Current Harmonics and Apparent Power




Abstract
:
1. Introduction
1.1. Motivation
1.2. State-of-the-Art
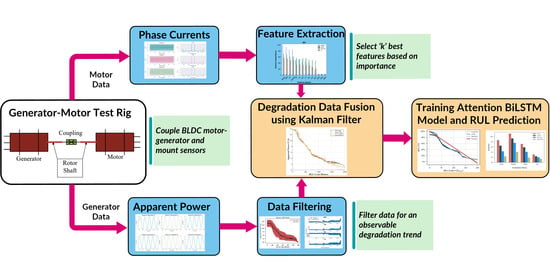
1.3. Proposed Method
2. Theoretical Overview
2.1. Electrical Signature Analysis (ESA)
2.1.1. Normalized Modal Current Signature Analysis (NMCSA)
2.1.2. Apparent Power
2.2. Attention LSTM
- used for updating
- input gate, forget gate, output gate
- weights. [* = input, forget, and output.]

2.3. Kalman Filter
3. Test Rig and Data Description
3.1. Experiment Setup
3.2. Failure Modes
- (1)
- Dataset-1: An inter-turn short-circuit is created at the stator coil winding as shown in the B2’ winding in Figure 6a. This fault generates two different impedances on the coil winding creating a disturbance in current flow. It is also called a turn-to-turn fault where a short-circuit is produced in two sections of the stator coil. This type of fault is labeled “ITF fault” which is illustrated in Figure 6a.
- (2)
- Dataset-2: In this type of fault, two adjacent windings are shorted. This type of fault is labeled as a winding short-circuit (WSC) fault. Figure 6b shows a winding short-circuit fault where Phase A and Phase C are shorted together through the windings A1 and C2′. In this paper, this type of setting is labeled “WSC fault”.
- (3)
- Dataset-3: This dataset consists of data from a motor with both ITF and WSC fault generated on the stator at the same time. This type of scenario is labeled “Hybrid fault”.
4. RUL Prediction
4.1. ESA
- = The ratio of the variance calculated among the means to the variance within the features, which is computed using the analysis of variance (ANOVA) test.
- = A measure of feature’s prognostibility.
- = Measures the stochastic dominance of to one another.
4.2. Apparent Power Degradation Data
4.3. RUL Fusion and Prediction
4.4. Validation
- = actual power data
- = predicted power data by the models
- = The total number of data
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Kim, N.-H.; An, D.; Choi, J.-H. Prognostics and Health Management of Engineering Systems; Springer International Publishing: Basel, Switzerland, 2017; pp. 18–185. [Google Scholar]
- Pecht, M.G.; Kang, M. (Eds.) Prognostics and Health Management of Electronics: Fundamentals, Machine Learning, and the Internet of Things; John Wiley & Sons: Hoboken, NJ, USA, 2018; pp. 5–72. [Google Scholar]
- Lei, Y. Intelligent Fault Diagnosis and Remaining Useful Life Prediction of Rotating Machinery; Butterworth-Heinemann: Oxford, UK, 2016; pp. 12–86. [Google Scholar]
- Nandi, S.; Toliyat, H.A.; Li, X. Condition Monitoring and Fault Diagnosis of Electrical Motors—A Review. IEEE Trans. Energy Convers. 2005, 20, 719–729. [Google Scholar] [CrossRef]
- Loutas, T.H.; Roulias, D.; Georgoulas, G. Remaining useful life estimation in rolling bearings utilizing data-driven probabilistic e-support vectors regression. IEEE Trans. Reliab. 2013, 62, 821–832. [Google Scholar] [CrossRef]
- Medjaher, K.; Tobon-Mejia, D.A.; Zerhouni, N. Remaining Useful Life Estimation of Critical Components with Application to Bearings. IEEE Trans. Reliab. 2012, 61, 292–302. [Google Scholar] [CrossRef] [Green Version]
- Peng, Y.; Hou, Y.; Song, Y.; Pang, J.; Liu, D. Lithium-Ion Battery Prognostics with Hybrid Gaussian Process Function Regression. Energies 2018, 11, 1420. [Google Scholar] [CrossRef] [Green Version]
- Djeziri, M.A.; Benmoussa, S.; Zio, E. Review on Health Indices Extraction and Trend Modeling for Remaining Useful Life Estimation. In Artificial Intelligence Techniques for a Scalable Energy Transition; Springer Science and Business Media LLC: Cham, Switzerland, 2020; pp. 183–223. [Google Scholar]
- Si, X.-S.; Wang, W.; Hu, C.-H.; Zhou, D.-H. Remaining useful life estimation—A review on the statistical data driven approaches. Eur. J. Oper. Res. 2011, 213, 1–14. [Google Scholar] [CrossRef]
- Caesarendra, W.; Tjahjowidodo, T. A review of feature extraction methods in vibration-based condition monitoring and its application for degradation trend estimation of low-speed slew bearing. Machines 2017, 5, 21. [Google Scholar] [CrossRef]
- Randall, R.B. Vibration-Based Condition Monitoring: Industrial, Automotive and Aerospace Applications; John Wiley & Sons: Hoboken, NJ, USA, 2021; pp. 86–318. [Google Scholar]
- Moshrefzadeh, A. Condition monitoring and intelligent diagnosis of rolling element bearings under constant/variable load and speed conditions. Mech. Syst. Signal Process. 2021, 149, 107153. [Google Scholar] [CrossRef]
- Candelo-Zuluaga, C.; Riba, J.-R.; López-Torres, C.; Garcia, A. Detection of Inter-Turn Faults in Multi-Phase Ferrite-PM Assisted Synchronous Reluctance Machines. Energies 2019, 12, 2733. [Google Scholar] [CrossRef] [Green Version]
- Garcia-Calva, T.; Morinigo-Sotelo, D.; Fernandez-Cavero, V.; Garcia-Perez, A.; Romero-Troncoso, R. Early Detection of Broken Rotor Bars in Inverter-Fed Induction Motors Using Speed Analysis of Startup Transients. Energies 2021, 14, 1469. [Google Scholar] [CrossRef]
- Yang, F.; Habibullah, M.S.; Zhang, T.; Xu, Z.; Lim, P.; Nadarajan, S. Health Index-Based Prognostics for Remaining Useful Life Predictions in Electrical Machines. IEEE Trans. Ind. Electron. 2016, 63, 2633–2644. [Google Scholar] [CrossRef]
- Strangas, E.G.; Aviyente, S.; Zaidi, S.S.H. Time–Frequency Analysis for Efficient Fault Diagnosis and Failure Prognosis for Interior Permanent-Magnet AC Motors. IEEE Trans. Ind. Electron. 2008, 55, 4191–4199. [Google Scholar] [CrossRef]
- Alam Shifat, T.; Hur, J.-W. ANN Assisted Multi Sensor Information Fusion for BLDC Motor Fault Diagnosis. IEEE Access 2021, 9, 9429–9441. [Google Scholar] [CrossRef]
- Alam Shifat, T.; Jang-Wook, H. Remaining Useful Life Estimation of BLDC Motor Considering Voltage Degradation and Attention-Based Neural Network. IEEE Access 2020, 8, 168414–168428. [Google Scholar] [CrossRef]
- Krichen, M.; Elbouchikhi, E.; Benhadj, N.; Chaieb, M.; Benbouzid, M.; Neji, R. Motor Current Signature Analysis-Based Permanent Magnet Synchronous Motor Demagnetization Characterization and Detection. Machines 2020, 8, 35. [Google Scholar] [CrossRef]
- Alam Shifat, T.; Hur, J.-W. An Effective Stator Fault Diagnosis Framework of BLDC Motor Based on Vibration and Current Signals. IEEE Access 2020, 8, 106968–106981. [Google Scholar] [CrossRef]
- Cruz, S.; Cardoso, A. Stator winding fault diagnosis in three-phase synchronous and asynchronous motors, by the extended Park’s vector approach. IEEE Trans. Ind. Appl. 2001, 37, 1227–1233. [Google Scholar] [CrossRef]
- Zafarani, M.; Bostanci, E.; Qi, Y.; Goktas, T.; Akin, B. Interturn Short-Circuit Faults in Permanent Magnet Synchronous Machines: An Extended Review and Comprehensive Analysis. IEEE J. Emerg. Sel. Top. Power Electron. 2018, 6, 2173–2191. [Google Scholar] [CrossRef]
- Drif, M.; Cardoso, A.J.M. Stator Fault Diagnostics in Squirrel Cage Three-Phase Induction Motor Drives Using the Instantaneous Active and Reactive Power Signature Analyses. IEEE Trans. Ind. Inform. 2014, 10, 1348–1360. [Google Scholar] [CrossRef]
- Faiz, J.; Moosavi, S.M.M. Detection of mixed eccentricity fault in doubly-fed induction generator based on reactive power spectrum. IET Electr. Power Appl. 2017, 11, 1076–1084. [Google Scholar] [CrossRef]
- Ehsanifar, A.; Allahbakhshi, M.; Tajdinian, M.; Dehghani, M.; Montazeri, Z.; Malik, O.; Guerrero, J.M. Transformer inter-turn winding fault detection based on no-load active power loss and reactive power. Int. J. Electr. Power Energy Syst. 2021, 130, 107034. [Google Scholar] [CrossRef]
- Jafari, A.; Faiz, J.; Jarrahi, M.A. A Simple and Efficient Current Based Method for Inter-turn Fault Diagnosis of Brush-less Direct Current Motors. IEEE Trans. Ind. Inform. 2020, 17, 2707–2715. [Google Scholar] [CrossRef]
- Perera, N.; Rajapakse, A.D.; Buchholzer, T.E. Isolation of faults in distribution networks with distributed generators. IEEE Trans. Power Deliv. 2008, 23, 2347–2355. [Google Scholar] [CrossRef]
- Guo, M.-F.; Zeng, X.-D.; Chen, D.-Y.; Yang, N.-C. Deep-Learning-Based Earth Fault Detection Using Continuous Wavelet Transform and Convolutional Neural Network in Resonant Grounding Distribution Systems. IEEE Sens. J. 2018, 18, 1291–1300. [Google Scholar] [CrossRef]
- Alam Shifat, T.; Hur, J.-W. EEMD assisted supervised learning for the fault diagnosis of BLDC motor using vibration signal. J. Mech. Sci. Technol. 2020, 34, 3981–3990. [Google Scholar] [CrossRef]
- Grigsby, L.L. Electric Power Generation, Transmission, and Distribution; CRC Press: Boca Raton, FL, USA, 2018; pp. 18–230. [Google Scholar]
- Hubert, C.I. Electric Machines: Theory, Operation, Applications, Adjustment, and Control; Pearson Education: Upper Saddle River, NJ, USA, 2002; pp. 68–334. [Google Scholar]
- Zhang, J.; Wang, P.; Yan, R.; Gao, R.X. Long short-term memory for machine remaining life prediction. J. Manuf. Syst. 2018, 48, 78–86. [Google Scholar] [CrossRef]
- Yao, J.; Jiang, X.; Wang, S.; Jiang, K.; Yu, X. SVM-BiLSTM: A Fault Detection Method for the Gas Station IoT System Based on Deep Learning. IEEE Access 2020, 8, 203712–203723. [Google Scholar]
- Ng, A. CS229 Course Notes: Deep Learning; Stanford University: Stanford, CA, USA, 2018. [Google Scholar]
- Mamo, T.; Wang, F.-K. Long Short-Term Memory with Attention Mechanism for State of Charge Estimation of Lithium-Ion Batteries. IEEE Access 2020, 8, 94140–94151. [Google Scholar] [CrossRef]
- Zhou, H.; Zhang, Y.; Yang, L.; Liu, Q.; Yan, K.; Du, Y. Short-Term Photovoltaic Power Forecasting Based on Long Short Term Memory Neural Network and Attention Mechanism. IEEE Access 2019, 7, 78063–78074. [Google Scholar] [CrossRef]
- Chen, Z.; Wu, M.; Zhao, R.; Guretno, F.; Yan, R.; Li, X. Machine Remaining Useful Life Prediction via an Attention-Based Deep Learning Approach. IEEE Trans. Ind. Electron. 2020, 68, 2521–2531. [Google Scholar] [CrossRef]
- Bishop, G.; Welch, G. “An Introduction to the Kalman Filter.” Proc of SIGGRAPH, Course 8.27599-23175 (2001): 41. Available online: http://132.206.230.228/e761/SIGGRAPH2001_CoursePack_08.pdf (accessed on 1 May 2021).
- Huang, S.; Tan, K.K.; Lee, T.H. Fault Diagnosis and Fault-Tolerant Control in Linear Drives Using the Kalman Filter. IEEE Trans. Ind. Electron. 2012, 59, 4285–4292. [Google Scholar] [CrossRef]
- Foo, G.H.B.; Zhang, X.; Vilathgamuwa, D.M. A Sensor Fault Detection and Isolation Method in Interior Permanent-Magnet Synchronous Motor Drives Based on an Extended Kalman Filter. IEEE Trans. Ind. Electron. 2013, 60, 3485–3495. [Google Scholar] [CrossRef]
- Hur, J.-W.; Alam, T. Motor vibration analysis for the fault diagnosis in nonstationary operating conditions. Int. J. Integr. Eng. 2020, 12, 151–160. [Google Scholar]
- Kim, S.H. Electric Motor Control: DC AC and BLDC Motors; Elsevier: Amsterdam, The Netherlands, 2017. [Google Scholar]
- Yedamale, P. Brushless DC (BLDC) Motor Fundamentals; Microchip Technology Inc.: Chandler, AZ, USA, 2003; Volume 20, pp. 3–15. [Google Scholar]
- Kandiban, R.; Arulmozhiyal, R. Speed control of BLDC motor using adaptive fuzzy PID controller. Procedia Eng. 2012, 38, 306–313. [Google Scholar] [CrossRef] [Green Version]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Measurement |
|---|---|
| Motor model | BLS-24026N |
| Generator model | BLS-24040N |
| Input Parameters | 24.0 VDC & 7.0 A (max) |
| Current module | NI 9246 |
| Voltage module | NI 9203, NI 9205 |
| Temperature module | NI 9214 |
| Electrical load | 10 MΩ DELTA |
| Motor’s Power(rated) | 26 W |
| Generator Power(rated) | 40 W |
| Shaft Speed (rated) | 4000 RPM |
| Sampling Frequency (Voltage, Current) | 5 kHz |
| Motor Phase | Commutation Logic | ||||||||
|---|---|---|---|---|---|---|---|---|---|
| Step | A | B | C | AH | AL | BH | BL | CH | CL |
| 01 | + | - | OFF | 1 | 0 | 0 | 1 | 0 | 0 |
| 02 | + | OFF | - | 1 | 0 | 0 | 0 | 0 | 1 |
| 03 | OFF | + | - | 0 | 0 | 1 | 0 | 0 | 1 |
| 04 | - | + | OFF | 0 | 1 | 1 | 0 | 0 | 0 |
| 05 | - | OFF | + | 0 | 1 | 0 | 0 | 1 | 0 |
| 06 | OFF | - | + | 0 | 0 | 0 | 1 | 1 | 0 |
| NMC Parameters | Amplitudes and Frequency Band | |||||||
|---|---|---|---|---|---|---|---|---|
| Healthy | ITF Fault | WSC Fault | Hybrid Fault | |||||
| f(Hz) | |INMC| | f(Hz) | |INMC| | f(Hz) | |INMC| | f(Hz) | |INMC| | |
| fn | 238 | 4.21 | 330 | 3.20 | 275 | 2.71 | 210 | 2.08 |
| First H3 | - | - | 1118 | 0.92 | 1009 | 0.71 | 997 | 0.43 |
| Second H3 | - | - | 1580 | 0.23 | 1630 | 0.20 | 1610 | 0.23 |
| Domains | Feature Names |
|---|---|
| Time Domain | Peak-to-Peak (P2P), Root Sum of Squares (RSSQ), Variance (VAR),FM4, FM8, M6A, Skewness (SKEW), L1 Norm (L1), L2 Norm (L2), Peak to RMS (P2RMS), Crest Factor (CF), Shape Factor (SF), Margin Factor (MF), Clearance Factor (CLF). |
| Frequency Domain | Peak Frequency (PF), Total Harmonic Distortion (THD), Spectral Skewness (SS), Mean frequency (MF), 3rd harmonic magnitude (H3), Entropy, Root Variance Frequency (RVF). |
| Parameter | Value |
|---|---|
| RNN Cell | BiLSTM |
| Hidden Layers | 2 |
| Optimizer | Adam |
| Dropout | 0.15 |
| Neurons | 512, 512 |
| Loss Function | MAE |
| Epochs | 1000 |
| Activation | ReLU |
| Dataset Size | ANN | LSTM | BiLSTM | ABLSTM |
|---|---|---|---|---|
| 25% | 0.037 | 0.025 | 0.021 | 0.016 |
| 50% | 0.033 | 0.018 | 0.019 | 0.011 |
| 75% | 0.027 | 0.193 | 0.18 | 0.012 |
| 100% | 0.031 | 0.24 | 0.20 | 0.014 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shifat, T.A.; Yasmin, R.; Hur, J.-W. A Data Driven RUL Estimation Framework of Electric Motor Using Deep Electrical Feature Learning from Current Harmonics and Apparent Power. Energies 2021, 14, 3156. https://doi.org/10.3390/en14113156
Shifat TA, Yasmin R, Hur J-W. A Data Driven RUL Estimation Framework of Electric Motor Using Deep Electrical Feature Learning from Current Harmonics and Apparent Power. Energies. 2021; 14(11):3156. https://doi.org/10.3390/en14113156
Chicago/Turabian StyleShifat, Tanvir Alam, Rubiya Yasmin, and Jang-Wook Hur. 2021. "A Data Driven RUL Estimation Framework of Electric Motor Using Deep Electrical Feature Learning from Current Harmonics and Apparent Power" Energies 14, no. 11: 3156. https://doi.org/10.3390/en14113156
APA StyleShifat, T. A., Yasmin, R., & Hur, J. -W. (2021). A Data Driven RUL Estimation Framework of Electric Motor Using Deep Electrical Feature Learning from Current Harmonics and Apparent Power. Energies, 14(11), 3156. https://doi.org/10.3390/en14113156