1. Introduction
Over the last few decades, different transverse flux motors (TFMs) have been designed and tested in order to explore their potential in vehicle traction applications [
1,
2,
3,
4,
5,
6,
7,
8,
9,
10,
11].
TFMs have higher torque and power density than radial-flux machines [
9,
12,
13], so they are specially well suited for direct-drive systems such as robotics [
14] or in-wheel traction [
4,
5,
8,
9,
10]. Transverse flux machines have been also analyzed as linear motors [
15,
16] and direct-drive wind generators [
17,
18,
19,
20,
21,
22] using similar techniques. In both cases, motor or generator, the gearbox is eliminated, resulting in a higher efficiency and reliability. Both features are shared with reluctance machines, so TFMs are strong candidates to inherit reluctance machinery applications such as elevators [
23,
24], industrial facilities [
25], and home appliances [
26].
In the field of electric vehicles, some preliminary analysis of TFMs for vehicle traction—not necessarily in-wheel motors—has been made. In [
1], a description of the topology is made, together with a 3D-FEM study—the machine geometry is approximated as linear with an extruded mesh—of an outer rotor TFM with I-bridges, also discussing the influence of some parameters and testing a prototype. In [
2], a 20 MW, 16-phase TFM is proposed for ship propulsion. Two flux-concentrating machines with U- and C-cores intended for hybrid buses electric propulsion—in this particular case a gearbox is required—are compared in [
3], starting from sizing equations proposed in [
12]. In [
4], the control of TFMs is studied, comparing theoretical and experimental data, and the results show that TFMs are challenging candidates for in-wheel traction of electric vehicles. A simple but too short design method is proposed in [
5] for an in-wheel TFM, based on an equivalent circuit and the comparison of 2D- and 3D-FEM simulations. A dual-rotor TFM is proposed in [
7,
11] as part of the power-split device in hybrid electric vehicles. An optimized design of a scooter in-wheel TFM is proposed in [
8] with ferrite magnets similar to Hallbach arrangement and C-cores. In [
10], an in-wheel motor with outer and passive rotor is designed and tested.
A comparison of transverse, axial, and radial flux motors for electric vehicles is made in [
6], but there is no design process. It is concluded that the TFM shows the highest torque for low electrical load and low speed. However, saturation of the TFM is easier and the torque is lower in the flux-weakening area (high speed). Another comparison is made in [
9], in this case between three in-wheel motor topologies (radial flux surface-mounted permanent magnet (PM)-synchronous motor, TFM, and claw-pole machine): the TFM shows a higher torque density but low overload capability, poor power factor, and low efficiency.
Out of the scope of electric vehicles, there are other remarkable publications in the literature about transverse flux machines whose techniques can be equally used to develop a design method for TFMs applied to vehicles. In [
12], a set of generic sizing equations is used in a transverse flux machine and its power density results higher than that of an induction machine, especially when rare-earth magnets are used. The torque (reluctance, interaction, and cogging) of a TFM for direct-drive robots is calculated in [
14] using 3D flux tubes, and after that a 3D-FEM verification is made. Coupled models (electric and magnetic) have been developed for a linear TFM [
15] and the potential of linear TFMs versus longitudinal linear motors has been explored [
16].
Transverse flux machines have also been analyzed for wind energy production. In [
17], the transverse flux topology is described and a generator is designed analytically with basic equivalent circuits (electric and thermal). In [
18], the authors propose a magnetic equivalent circuit (MEC) with 3D flux tubes verified with FEM—computation time is 25 times lower using MEC—. In [
19], sizing equations and FEM are used. The MEC proposed in [
18] is optimized in [
20] using a particle swarm optimization algorithm, with FEM verification again—computation time of MEC optimization is half that FEM optimization—. In [
21], a detailed study is made: MEC with 3D flux tubes (analyzing the fringing effect), optimization, FEM, and prototyping. An axial-gap transverse flux generator is designed in [
22] using a MEC and a sensitivity analysis.
A generic (with no specific application) FEM-designed TFM is proposed in [
27], varying geometric parameters and current. An evolutionary algorithm is introduced in [
28] to optimize a TFM with no PMs (reluctance machine in auto-piloted mode), coupling the algorithm with a 3D-FEM model and making prototypes. Sizing equations, MEC, and FEM verification are used in [
29], but the proposed transverse flux topology has a sectorial phase arrangement instead of the more common stacking arrangement.
In [
30], four prototypes of transverse flux machines are compared in terms of power density and cost: an outer rotor or double stator increase the former, whereas using rectangular PMs and poles decreases the latter. Another comparison is made in [
13] together with a review of the topology.
Axial-gap transverse flux machines [
4,
8,
18,
20,
22] have been much less proposed in the literature than radial-gap machines, and the existing topologies are too complex in terms of the magnetic circuit, as well as the manufacturing process. An axial gap favors a reduction in the motor length placing the stator disks opposite each other, thus leading to a two-phase arrangement if a 90 electrical degrees shift between phases is adopted. In this paper, a two-phase axial-gap TFM is designed (
Figure 1) to explore its potential for a scooter in-wheel traction. The proposed design aims to have a low cost, so both the machine structure and the design method must avoid the excessive complexity found in literature models. The magnetic circuit is based on U-shaped iron cores, I-bridges, and embedded magnets in a disk-shaped rotor. The geometry of the stator housing is intended for additive manufacturing of a non-magnetic material. Besides, the novel analytical design method combines both dimensioning and performance equations (dq model) in order to avoid the high computational cost of FEM-coupled design methods, then optimizing the analytical model using a multiobjective genetic algorithm, and finally verifying the model using FEM.
This paper is organized as follows. In
Section 2, the basic aspects of TFMs structure are explained. In
Section 3, the dimensioning equations and the stationary dq model are presented; in
Section 4, the previous model is optimized using a multiobjective genetic algorithm; and, finally, in
Section 5 a FEM verification is made.
2. TFMs Structure
Electric machines can be categorized according to their operation mode (motor or generator), current periodicity (AC or DC), rotor speed (synchronous or asynchronous), or flux path (radial, axial, or transverse).
Table 1 shows different options regarding flux path and three basic features of the machine construction: air gap (radial -RD- or axial -AX-), stator winding (distributed -DT-, concentrated -CO- or ring-shaped -RS-), and rotor (cylindrical -CY- or disk-shaped -DS-). Only transverse flux machines can have either a radial or axial air gap, thus leading to a cylindrical or disk-shaped rotor.
In the transverse flux topology the magnetic flux embraces the ring-shaped coil and the flux path is transverse to the direction of movement, so it is possible to increase the torque by increasing the number of poles but keeping constant the flux linkage. The torque of a generic synchronous motor with the same d- and q-inductances can be expressed as
It is clear that obtaining a higher torque makes necessary to increase one of the three contributions of the right side of Equation (
1):
can be increased with magnets of higher flux density (i.e., rare-earth magnets that will also probably increase the cost of the motor), a higher area or increasing the number of turns.
can be increased with a higher stator current, but the efficiency will decrease (torque is linear with current, but Joule losses are quadratic) and the current density will increase (thus heating might be too high).
p can be increased with a higher number of poles, thus increasing or not the machine diameter.
In radial- or axial-flux machines, the pole section is halved if the pole pairs are doubled, thus
is halved and the torque remains the same according to Equation (
1). Only in TFMs is it possible to increase
p keeping constant the flux linkage
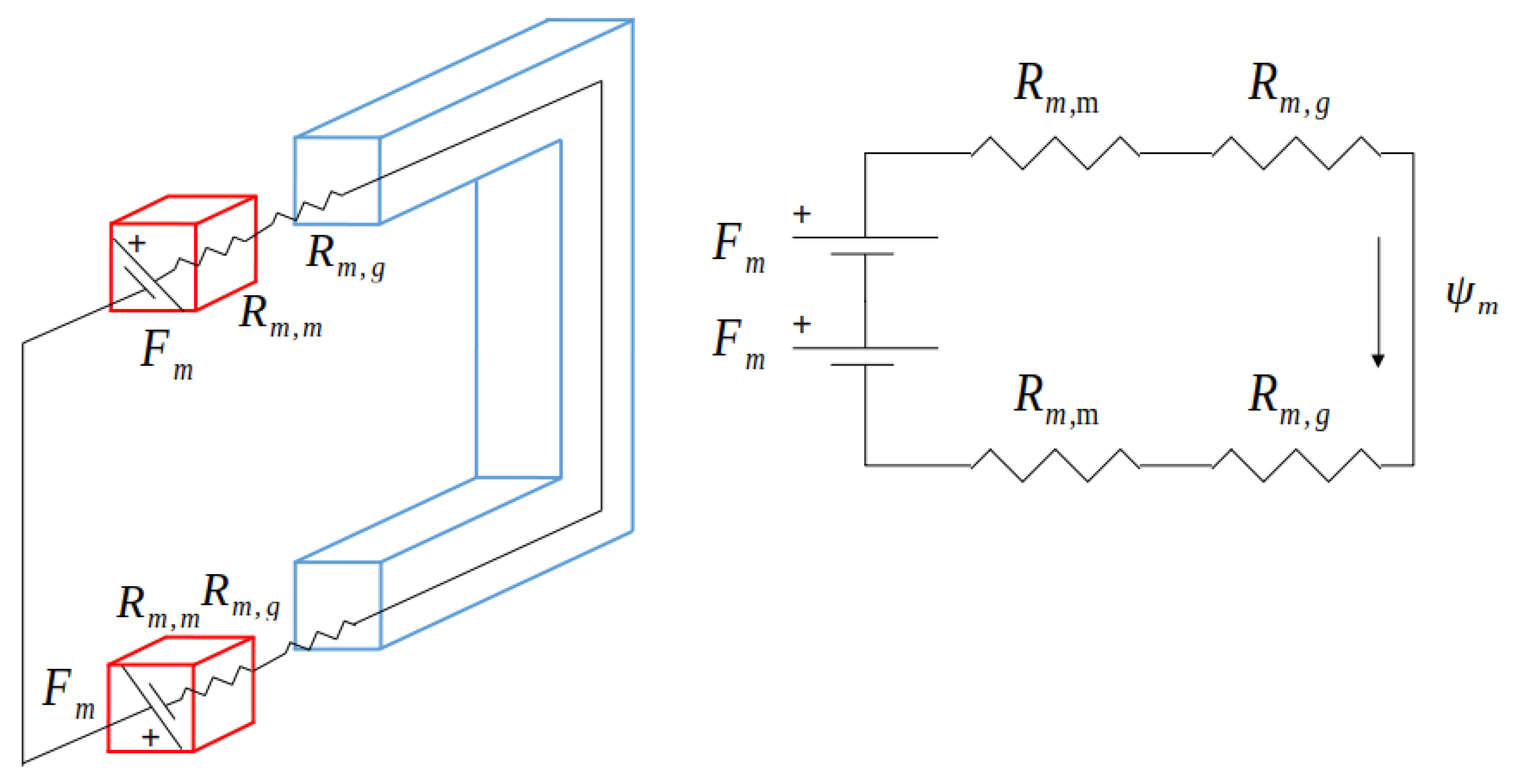
and the diameter, so the torque increases in the same way. Due to TFMs structure—ring-shaped coil and magnetic cores embracing it—the electric and magnetic circuits are decoupled, so the electric and magnetic loads are independent. Otherwise, cogging torque and leakage flux are significant, and also the high number of pieces (cores and magnets) makes the manufacture complex.
Most of TFMs have PMs on the rotor, basically ferrite- or NdFeB-based. Magnets can be surface-mounted (half of the magnets are useless, thus leakage flux can be reduced with I-bridges) or flux-concentrated in an outer or inner rotor, with radial or axial air gap. The stator is based on U- or C-cores of laminated steel or SMC, placed in one or both sides of the stator. The armature winding is generally ring-shaped.
The proposed TFM (
Figure 1) has an axial gap, disk-shaped rotor, NdFeB inset magnets, and U- and I-cores of laminated steel. As occurs in many axial-gap machines, it has a larger diameter and lower axial length than an equivalent radial-flux machine.
4. Optimization with Multiobjective Genetic Algorithm
Figure 7 shows the flowchart of the optimization stage. The decision variables of the optimization are shown in
Table 4, their ranges are based on previous experience and literature. Furthermore, it is shown if each variable is continuous (C) or discrete (D). The available magnets for the design are shown in
Table 5.
The constraints are given by the inverter DC voltage (Equation (
13)), current density (Equation (
14)), and magnetic saturation (Equation (
15)):
The objective functions are set to maximize both the torque density and the efficiency (Equation (
16)), where the vector
contains the decision variables from
Table 4,
M is the mass of the motor, and the efficiency
is calculated from the stationary dq model (Equation (
10)).
To check if iron losses (
) were negligible in the efficiency calculation, we made an initial calculation using classical formulas (Equation (
17)), where
typically in iron,
f is the frequency,
is the air gap flux density,
typically in iron,
a is the thickness of each iron sheet,
is the iron conductivity, and
is the iron volume of the entire machine.
With the optimal design values, we obtained 3 W of iron losses, while copper losses were more than 200 W. In this way, it is reasonable to neglect iron losses in the analytical model.
The election of two objective functions allows obtaining a two-dimensional Pareto front (
Figure 8), then choosing a unique point as the final design. A MATLAB-based multiobjective genetic algorithm (which is a controlled elitist genetic algorithm, a variant of NSGA-II) has been used. The population size, the number of generations, and the mutation function have been left by default.
The use of a multiobjective genetic algorithm is a novel approach in transverse flux machines design—for example, in [
28] a single weighted function is used instead—.
Some results are shown in
Table 6: Designs 1–4 correspond to by-hand designs, whereas Designs 10 and 11 are two Pareto optimals. In Designs 1–4, one of the decision variables is modified manually, obtaining different results in terms of efficiency and torque density. Design 10 minimizes the distance to the point
of the Pareto front, but Design 11 has been chosen instead as the final design because its efficiency is higher than Design 10 and the torque density is acceptable too.
Table 7 shows a comparison between the proposed design and other TFMs, just to check that the obtained torque density and efficiency agree with previous literature of TFMs for in-wheel traction. Moreover, according to
Table 4 the pole pairs are limited to 9 (due to material limitations to build a prototype), thus changing the decision limits might raise the efficiency.
Solving the stationary dq model (Equations (
10)–(
12)) it is possible to obtain performance curves. For example, the efficiency–frequency curve of the optimum design (Design 11) for different resistant torques is shown in
Figure 9: lower efficiencies are obtained at high torque ratios because the current is higher and so the electric losses.
6. Conclusions
In this paper, a novel two-phase axial-gap transverse flux motor for in-wheel traction is proposed, using U- and I-cores in the stator and cube-shaped magnets in the rotor. The machine structure aims to combine both the torque magnification inherited of transverse flux machines and a simple design method, in order to avoid the complexity of many designs of the literature in terms of construction and modeling.
The axial gap favors a two-phase configuration with opposite stator disks that is easier to control than a single-phase motor, providing a constant torque under control, as occurs in three-phase machines. The electrical model of the TFM reduces to dq, torque, and control equations, whose parameters depend on machine geometry, leading to a less time-consuming design method than FEM-coupled techniques. In this way, a multiobjective genetic algorithm is used to optimize the dimensions of the machine according to its performance (efficiency and torque density). Finally, a 3D FEM model is computed to verify the analytical model. There are some discrepancies between the analytical and FEM model in terms of torque and inductances, probably due to an inaccurate estimation of the flux path using flux tubes, so this model must be improved. The torque ripple is high, so the design method should be partially reformulated to take into account some specific criteria.




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}