
Framework for the Introduction of Vehicle-to-Grid Technology into the Polish Electricity Market

 , ,
, ,
Abstract
:1. Introduction
2. V2X Technology—General Aspects
2.1. State-Of-The-Art
2.2. Novelty
- Proposals for changes in domestic (Polish) legal acts were indicated;
- The authors’ concept of the V2G Program, i.e., the set of services that could be provided by owners of electric vehicles under the vehicle-to-anything technology, was developed.
3. Legal Framework of V2G Technology in European Union and Poland
3.1. Status of Energy Storage Facilities
- Storage facilities must be fully integrated into the power grid;
- The national regulatory authority has given its approval for such actions;
- Other parties were not permitted to set up or operate energy storage facilities;
- Energy storage facilities are necessary for DSOs to fulfil their obligations and regulations under Directive 2019/944 in order to ensure safe operation of the power system;
- Storage facilities must not be subject to market play and additional revenues for DSOs.
3.2. Flexibility
3.3. Electromobility Status in EU
- Electric vehicle—“a motor vehicle equipped with a powertrain containing at least one non-peripheral electric machine as energy converter with an electric rechargeable energy storage system, which can be recharged externally”;
- Recharging point—“an interface that is capable of charging one electric vehicle at a time or exchanging a battery of one electric vehicle at a time”;
- Recharging or refueling point accessible to the public—“a recharging or refueling point to supply an alternative fuel which provides Union-wide non-discriminatory access to users. Non-discriminatory access may include different terms of authentication, use and payment”.
- Other parties were not permitted to set up or operate charging points,
- The national regulatory authority has given its approval for such action,
- DSOs apply the principle of third-party access, while operating the charging points, and do not discriminate against other companies, in particular in favor of companies with capital connections to DSO.
3.4. Current Legal Framework in Poland
- Normal power recharging point—“a recharging point that allows for a transfer of electricity to an electric vehicle with a power less than or equal to 22 kW, excluding devices with a power less than or equal to 3.7 kW, which are installed in private households or the primary purpose of which is not recharging electric vehicles, and which are not accessible to the public”;
- High power recharging point—“a recharging point that allows for a transfer of electricity to an electric vehicle with a power of more than 22 kW”.
4. Proposed Model of V2G Program and Services
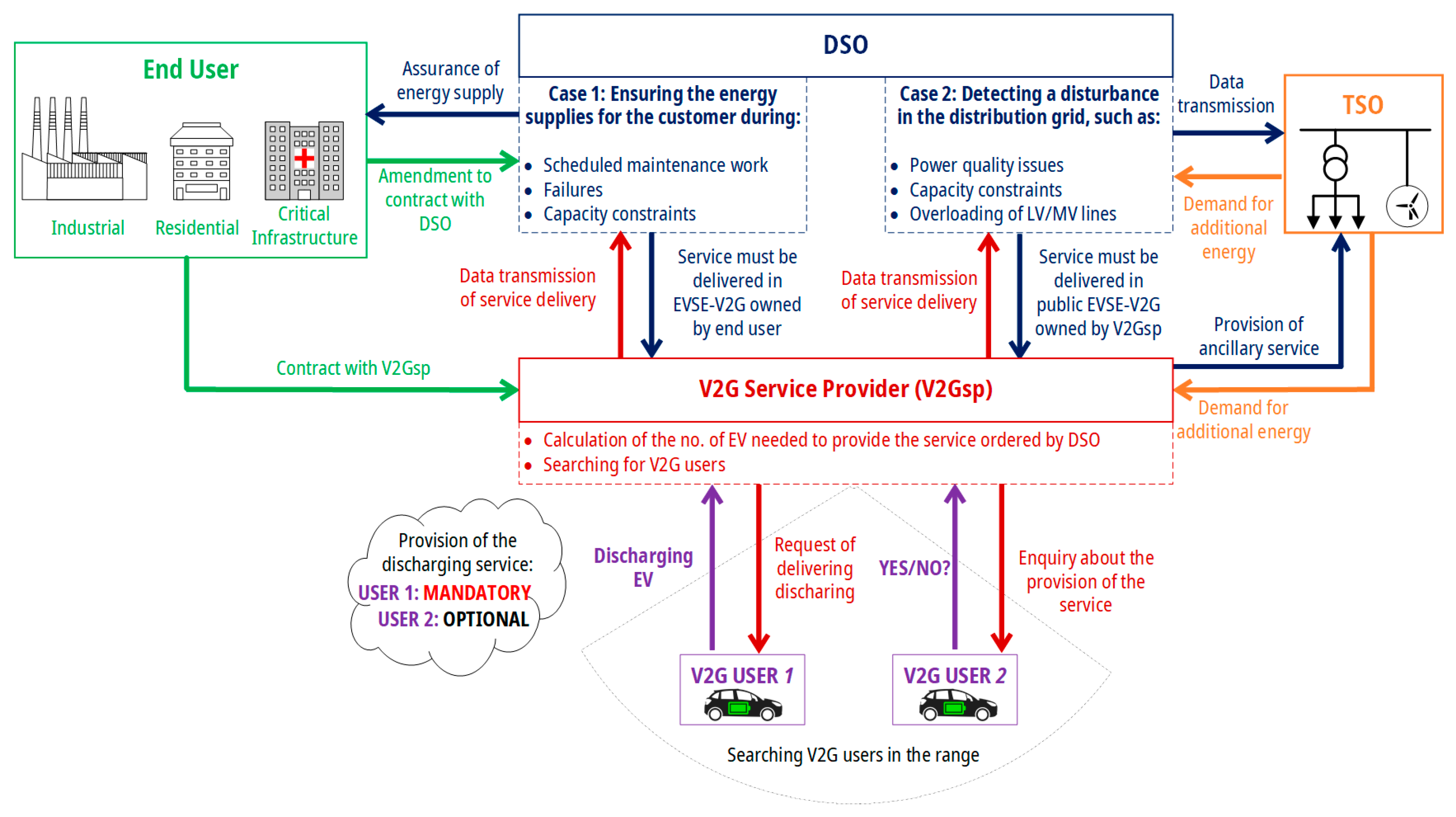
4.1. Model of V2G Program
- V2G Serviceis a defined action, which is undertaken by the V2G Program Participant, aimed at the improvement of the power system operation, or ensuring sufficient capacity for end-user.
- V2G Program Participant (uEV)is the owner of an electric vehicle or fleet of electric vehicles, who provides services by offering battery capacity to end-users or Distribution System Operator.
- End User (EndUs)is the energy consumer, who has decided to use electric vehicles for reserve power supply, within the V2G Program.
- The V2G Programis understood as the activity of a power company involving the use of electric vehicles to improve the operation of the power grid or/and to improve the security (assurance) of supply.
- V2G Service Provider (V2Gsp)is the party managing the V2G Program in a given area.
4.2. Model of Basic V2G Service
- eV2G—energy flow injected or consumed by 1 electric vehicle;
- C—capacity of the electric vehicle battery pack, in kWh;
- SOCex—expected battery State-of-Charge (SOC) at the end of the charging process;
- SOCt—current State-of-Charge (SOC) in the time t;
- SOCf—State-of-Charge required for the next journey;
- SOC0—minimal State-of-Charge limited by technical constraints;
- R—a reserve, which considers the possible lengthening of the route, e.g., to avoid a congestion;
- ηd—efficiency of discharging process;
- ηc—efficiency of charging process.
- Edmax—maximum end user’s electricity demand from V2G Program, which can be obtained from V2G charging points, in kWh;
- nCS—number of bi-directional charging points owned by EndUs;
- PEVSE,i—rated power of bi-directional charging point, in kW.
- Ed—end user’s electricity demand from V2G Program, in kWh;
- eV2G+,n—energy flow injected by n-th electric vehicle;
- —required number of electric vehicles for provision of V2G Service for end user.
- Ed—end user’s electricity demand from V2G Program, in kWh;
- Edmax—maximum end user’s electricity demand from V2G Program, which can be obtained from V2G charging points, in kWh;
- k—reserve level; the authors suggest that k-factor should be limited: 1 < k < 1.1.
- P(A)—total probability of providing V2G service;
- EV2G,t+—expected energy delivered to the end-user in time t.
- Ed—end user’s electricity demand from V2G Program, in kWh;
- —estimated number of electric vehicles expected to be involved in establishing V2G Service provision, considering the probability of service provision;
- P(A)—total probability of providing V2G service;
- eV2G+,n—energy flow injected by n-th electric vehicle;
- E′V2G,t+—expected energy delivered to the end-user in time t, which covers the reserve resulting from the probability of service provision P(A) < 1.
- P(A)—total probability of providing V2G service;
- P(EndUs)—probability of providing V2G service by end-user;
- P(V2Gsp)—probability of providing V2G service by V2G Service Provider;
- P(uEV)—probability of providing V2G service by V2G Participant.
- P(FEVSE)—probability of failure of a bi-directional charging point;
- P(DPL)—probability of the availability of V2G charging point at the place of service delivery.
- P(FS)—probability of failure of a metering and billing system.
- P(EC)—probability of the user’s reaction to providing the service at a given time—e.g., receiving an economic incentive;
- P(USEV)—probability of using the electric vehicle;
- P(INT)—probability of service interruption.
- Not at all (when EV2G,t+ < EV2Gmin);
- Completely (when Ed = EV2G,t+);
- Partially (when EV2G,t+ < Ed);
- Excessively (when EV2G,t+ > Ed), but it will be limited by the value of Edmax, which is the maximum energy that can be delivered from bi-directional charging points.
4.3. Proposal of an Algorithm for the Selection of Vehicles for the V2G Service
4.3.1. Search for Vehicles to Provide V2G Services
- xG and yG are the geometric coordinates of the selected point g.
- xGmax and yGmax are the boundary values of the area.
- Vehicle identification number (IDi);
- Geographical location, described by grid coordinates of the V2Gsp area (xi, yi);
- The current state of charge of the battery SOC (SOCt,i);
- Declared SOC level that must remain after ending the V2G service (SOCf,i);
- Battery capacity [kWh] (Ci);
- Maximum discharge power (PMAX,i);
- Vehicle type (TVi);
- Maximum service duration (tsi);
- Type of charge connection (CSi);
- Service provision mode—mandatory or optional (Mi).
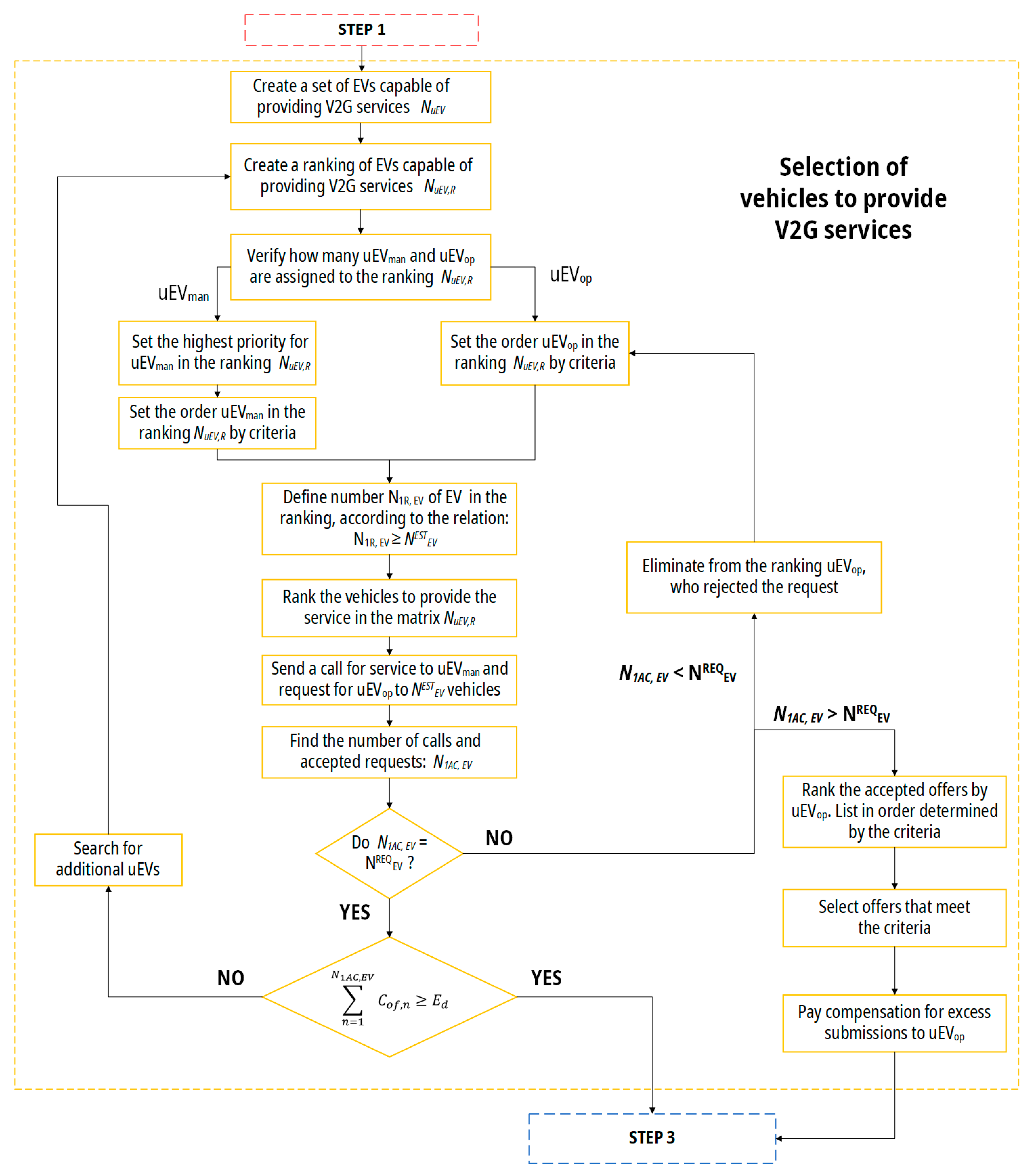
4.3.2. Selection of Vehicles to Provide V2G Services
- Identification number: ;
- Service provision mode: ;
- Distance between uEV and the service provision point: ;
- Energy offered from particular uEVi: ;
- ○
- Where —energy required to reach EndUs, as a percentage of the battery’s rated capacity; —average electricity consumption of an electric vehicle;
- Maximum service provision time: ;
- Maximum discharge power: .
- ;
- ;
- ;
- .
- —estimated number of electric vehicles expected to provide a V2G service to an end user, considering the probability of service provision.
5. Case Study
- S—area of shopping center, in m2;
- —annual energy demand for shopping center, in kWh;
- —hourly energy demand for shopping center, in kWh;
- —hourly energy demand for HVAC in shopping center, in kWh;
- —demand requested by EndUs, in kWh.
- —number of vehicles in the V2Gsp area;
- —the average value of the energy delivered by 1 electric vehicle, in kWh.
- Service provision mode:
- ;
- Distance between uEV and the service provision point:
- Energy offered from particular uEVi:
- Maximum service provision time: ;
- Maximum discharge power: ;
- Service provision mode:
- ;
- Distance between uEV and the service provision point:
- Energy offered from particular uEVi:
- Maximum service provision time: ;
- Maximum discharge power: ;
6. Conclusions and Discussion
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Siskos, P.; Capros, P.; De Vita, A. CO2 and energy efficiency car standards in the EU in the context of a decarbonisation strategy: A model-based policy assessment. Energy Policy 2015, 84, 22–34. [Google Scholar] [CrossRef]
- Foumani, M.; Smith-Miles, K. The impact of various carbon reduction policies on green flowshop scheduling. Appl. Energy 2019, 249, 300–315. [Google Scholar] [CrossRef]
- Benjaafar, S.; Li, Y.; Daskin, M.S. Carbon Footprint and the Management of Supply Chains: Insights from Simple Models. IEEE Trans. Autom. Sci. Eng. 2013, 10, 99–116. [Google Scholar] [CrossRef]
- Campbell, P.; Zhang, Y.; Yan, F.; Lu, Z.; Streets, D. Impacts of transportation sector emissions on future U.S. air quality in a changing climate. Part I: Projected emissions, simulation design, and model evaluation. Environ. Pollut. 2018, 238, 903–917. [Google Scholar] [CrossRef]
- Zhang, X.; Li, Z.; Wang, J. Impact of COVID-19 pandemic on energy consumption and carbon dioxide emissions in China’s transportation sector. Case Stud. Therm. Eng. 2021, 26, 101091. [Google Scholar] [CrossRef]
- Contestabile, M.; Alajaji, M.; Almubarak, B. Will current electric vehicle policy lead to cost-effective electrification of pas-senger car transport? Energy Policy 2017, 110, 20–30. [Google Scholar] [CrossRef]
- Thiel, C.; Nijs, W.; Simoes, S.; Schmidt, J.; van Zyl, A.; Schmid, E. The impact of the EU car CO2 regulation on the energy system and the role of electro-mobility to achieve transport decarbonization. Energy Policy 2016, 96, 153–166. [Google Scholar] [CrossRef]
- Engström, E.; Algers, S.; Hugosson, M.B. The choice of new private and benefit cars vs. climate and transportation policy in Sweden. Transp. Res. Part D Transp. Environ. 2019, 69, 276–292. [Google Scholar] [CrossRef]
- Sykes, M.; Axsen, J. No free ride to zero-emissions: Simulating a region’s need to implement its own zero-emissions vehicle (ZEV) mandate to achieve 2050 GHG targets. Energy Policy 2017, 110, 447–460. [Google Scholar] [CrossRef]
- Kłos, M.; Marchel, P.; Paska, J.; Bielas, R.; Błędzińska, M.; Michalski, Ł.; Wróblewski, K.; Zagrajek, K. Forecast and impact of electromobility development on the Polish Electric Power System. In Proceedings of the E3S Web of Conferences; EDP Sciences, 2019; Volume 84, p. 01005. Available online: https://www.e3s-conferences.org/articles/e3sconf/abs/2019/10/e3sconf_pe2019_01005/e3sconf_pe2019_01005.html (accessed on 20 June 2021).
- Geske, J.; Schumann, D. Willing to participate in vehicle-to-grid (V2G)? Why not! Energy Policy 2018, 120, 392–401. [Google Scholar] [CrossRef]
- Thompson, A.W.; Perez, Y. Vehicle-to-Everything (V2X) energy services, value streams, and regulatory policy implications. Energy Policy 2020, 137, 111136. [Google Scholar] [CrossRef]
- Liu, C.; Chau, K.T.; Wu, D.; Gao, S. Opportunities and Challenges of Vehicle-to-Home, Vehicle-to-Vehicle, and Vehicle-to-Grid Technologies. Proc. IEEE 2013, 101, 2409–2427. [Google Scholar] [CrossRef] [Green Version]
- Pearre, N.S.; Ribberink, H. Review of research on V2X technologies, strategies, and operations. Renew. Sustain. Energy Rev. 2019, 105, 61–70. [Google Scholar] [CrossRef]
- Khayyam, H.; Ranjbarzadeh, H.; Marano, V. Intelligent control of vehicle to grid power. J. Power Sources 2012, 201, 1–9. [Google Scholar] [CrossRef]
- Loisel, R.; Pasaoglu, G.; Thiel, C. Large-scale deployment of electric vehicles in Germany by 2030: An analysis of grid-to-vehicle and vehicle-to-grid concepts. Energy Policy 2014, 65, 432–443. [Google Scholar] [CrossRef]
- Yao, E.; Wong, V.W.S.; Schober, R. Robust Frequency Regulation Capacity Scheduling Algorithm for Electric Vehicles. IEEE Trans. Smart Grid 2016, 8, 1–14. [Google Scholar] [CrossRef]
- Liu, H.; Hu, Z.; Song, Y.; Wang, J.; Xie, X. Vehicle-to-Grid Control for Supplementary Frequency Regulation Considering Charging Demands. IEEE Trans. Power Syst. 2014, 30, 3110–3119. [Google Scholar] [CrossRef]
- Zecchino, A.; Prostejovsky, A.M.; Ziras, C.; Marinelli, M. Large-scale provision of frequency control via V2G: The Bornholm power system case. Electr. Power Syst. Res. 2019, 170, 25–34. [Google Scholar] [CrossRef]
- Wang, D.; Coignard, J.; Zeng, T.; Zhang, C.; Saxena, S. Quantifying electric vehicle battery degradation from driving vs. vehicle-to-grid services. J. Power Sources 2016, 332, 193–203. [Google Scholar] [CrossRef] [Green Version]
- Thompson, A.W. Economic implications of lithium ion battery degradation for Vehicle-to-Grid (V2X) services. J. Power Sources 2018, 396, 691–709. [Google Scholar] [CrossRef]
- Noel, L.; McCormack, R. A cost benefit analysis of a V2G-capable electric school bus compared to a traditional diesel school bus. Appl. Energy 2014, 126, 246–255. [Google Scholar] [CrossRef]
- Li, X.; Tan, Y.; Liu, X.; Liao, Q.; Sun, B.; Cao, G.; Li, C.; Yang, X.; Wang, Z. A cost-benefit analysis of V2G electric vehicles supporting peak shaving in Shanghai. Electr. Power Syst. Res. 2020, 179, 106058. [Google Scholar] [CrossRef]
- Sovacool, B.; Kester, J.; Noel, L.; Zarazua de Rubens, G. Actors, business models, and innovation activity systems for vehi-cle-to-grid (V2G) technology: A comprehensive review. Renew. Sustain. Energy Rev. 2020, 131, 109963. [Google Scholar] [CrossRef]
- Faddel, S.; Aldeek, A.; Al-Awami, A.T.; Sortomme, E.; Al-Hamouz, Z. Ancillary Services Bidding for Uncertain Bidirectional V2G Using Fuzzy Linear Programming. Energy 2018, 160, 986–995. [Google Scholar] [CrossRef]
- Brandt, T.; Wagner, S.; Neumann, D. Evaluating a business model for vehicle-grid integration: Evidence from Germany. Transp. Res. Part D Transp. Environ. 2017, 50, 488–504. [Google Scholar] [CrossRef]
- Alinejad, M.; Rezaei, O.; Kazemi, A.; Bagheri, S. An Optimal Management for Charging and Discharging of Electric Vehicles in an Intelligent Parking Lot Considering Vehicle Owner’s Random Behaviors. J. Energy Storage 2021, 35, 102245. [Google Scholar] [CrossRef]
- Cenex. V2G Market Study; Cenex: England, UK, 2018. [Google Scholar]
- Buonomano, A. Building to Vehicle to Building concept: A comprehensive parametric and sensitivity analysis for decision making aims. Appl. Energy 2020, 261, 114077. [Google Scholar] [CrossRef]
- Zhou, Y.; Cao, S.; Hensen, J.L.; Lund, P.D. Energy integration and interaction between buildings and vehicles: A state-of-the-art review. Renew. Sustain. Energy Rev. 2019, 114, 109337. [Google Scholar] [CrossRef]
- Buonomano, A.; Calise, F.; Cappiello, F.; Palombo, A.; Vicidomini, M. Dynamic analysis of the integration of electric vehi-cles in efficient buildings fed by renewables. Appl. Energy 2019, 245, 31–50. [Google Scholar] [CrossRef]
- Thomas, D.; Deblecker, O.; Ioakimidis, C.S. Optimal operation of an energy management system for a grid-connected smart building considering photovoltaics’ uncertainty and stochastic electric vehicles’ driving schedule. Appl. Energy 2018, 210, 1188–1206. [Google Scholar] [CrossRef]
- Ioakimidis, C.S.; Thomas, D.; Rycerski, P.; Genikomsakis, K.N. Peak shaving and valley filling of power consumption profile in non-residential buildings using an electric vehicle parking lot. Energy 2018, 148, 148–158. [Google Scholar] [CrossRef]
- Barone, G.; Buonomano, A.; Calise, F.; Forzano, C.; Palombo, A. Building to vehicle to building concept toward a novel zero energy paradigm: Modelling and case studies. Renew. Sustain. Energy Rev. 2019, 101, 625–648. [Google Scholar] [CrossRef]
- Tanguy, K.; Dubois, M.R.; Lopez, K.L.; Gagné, C. Optimization model and economic assessment of collaborative charging using Vehicle-to-Building. Sustain. Cities Soc. 2016, 26, 496–506. [Google Scholar] [CrossRef]
- Weiller, C.; Neely, A.D. Using electric vehicles for energy services: Industry perspectives. Energy 2014, 77, 194–200. [Google Scholar] [CrossRef]
- Zheng, Y.; Yu, H.; Shao, Z.; Jian, L. Day-ahead bidding strategy for electric vehicle aggregator enabling multiple agent modes in uncertain electricity markets. Appl. Energy 2020, 280, 115977. [Google Scholar] [CrossRef]
- Zagrajek, K.; Sosnowski, Ł.; Dukat, P.; Biczel, P. Legal conditions for the use of stationary and mobile energy storage facil-ities in distribution grids. Rynek Energii 2021, 2, 78–87. [Google Scholar]
- Noel, L.; Zarazua De Rubens, G.; Kester, J.; Sovacool, B. Vehicle-to-Grid—A Sociotechnical Transition Beyond Electric Mobility, Energy, Climate and the Environment; Palgrave MacMillan: London, UK, 2019; ISBN 978-3-030-04863-1. [Google Scholar]
- Kester, J.; Noel, L.; De Rubens, G.Z.; Sovacool, B. Promoting Vehicle to Grid (V2G) in the Nordic region: Expert ad-vice on policy mechanisms for accelerated diffusion. Energy Policy 2018, 116, 422–432. [Google Scholar] [CrossRef]
- Forrester, S.P.; Zaman, A.; Mathieu, J.; Johnson, J.X. Policy and market barriers to energy storage providing multiple services. Electr. J. 2017, 30, 50–56. [Google Scholar] [CrossRef]
- European Commission. Commission Staff Working Document: Energy Storage—The Role of Electricity. 2017. Available online: https://ec.europa.eu/energy/sites/ener/files/documents/swd2017_61_document_travail_service_part1_v6.pdf (accessed on 19 February 2021).
- Pareschi, G.; Küng, L.; Georges, G.; Boulouchos, K. Are travel surveys a good basis for EV models? Validation of simulated charging profiles against empirical data. Appl. Energy 2020, 275, 115318. [Google Scholar] [CrossRef]
- Pan, L.; Yao, E.; Yang, Y.; Zhang, R. A location model for electric vehicle (EV) public charging stations based on drivers’ existing activities. Sustain. Cities Soc. 2020, 59, 102192. [Google Scholar] [CrossRef]
- Langbroek, J.H.M.; Franklin, J.P.; Susilo, Y.O. Electric vehicle users and their travel patterns in Greater Stockholm. Transp. Res. Part D 2017, 52, 98–111. [Google Scholar] [CrossRef]
- Gu, Y.; Liu, M. Fair and privacy-aware EV discharging strategy using decentralized whale optimization algorithm for minimizing cost of EVs and the EV aggregator. IEEE Syst. J. Early Access 2021, 1–12. [Google Scholar] [CrossRef]
- Han, W.; Xiao, Y. Privacy preservation for V2G networks in smart grid: A survey. Comput. Commun. 2016, 91–92, 17–28. [Google Scholar] [CrossRef] [Green Version]
- European Parliament. Directive 2019/944 of 5 June 2019 on Common Rules for the Internal Market for Electricity; European Parliament: Brussels, Belgium, 2019. [Google Scholar]
- Babatunde, O.M.; Munda, J.L.; Haman, Y. Power system flexibility: A review. Energy Rep. 2020, 6, 101–106. [Google Scholar] [CrossRef]
- Oikonomou, K.; Parvania, M.; Khatami, R. Coordinated deliverable energy flexibility and regulation capacity of distribu-tion networks. Electr. Power Energy Syst. 2020, 123, 106219. [Google Scholar] [CrossRef]
- Zhou, Y.; Cao, S. Energy flexibility investigation of advanced grid-responsive energy control strategies with the static bat-tery and electric vehicles: A case study of a high-rise office building in Hong Kong. Energy Convers. Manag. 2019, 199, 111888. [Google Scholar] [CrossRef]
- Troitzsch, S.; Sreepathi, B.K.; Huynh, T.P.; Moine, A.; Hanif, S.; Fonseca, J.; Hamacher, T. Optimal electric-distribution-grid planning considering the demand-side flexibility of thermal building systems for a test case in Singapore. Appl. Energy 2020, 273, 114917. [Google Scholar] [CrossRef]
- Schuller, A.; Flath, C.M.; Gottwalt, S. Quantifying load flexibility of electric vehicles for renewable energy integration. Appl. Energy 2015, 151, 335–344. [Google Scholar] [CrossRef]
- Huber, J.; Dann, D.; Weinhardt, C. Probabilistic forecasts of time and energy flexibility in battery electric vehicle charging. Appl. Energy 2020, 262, 114525. [Google Scholar] [CrossRef]
- Rundqi, D.; Xiang, Y.; Huo, D.; Liu, Y.; Huang, Y.; Huang, C.; Liu, J. Exploring flexibility of electric vehicle aggregators as energy reserve. Electr. Power Syst. Res. 2020, 184, 106305. [Google Scholar]
- CEDEC. TSO-DSO Report—An Integrated Approach to Active System Management. April 2019. Available online: https://eepublicdownloads.blob.core.windows.net/public-cdn-container/clean-documents/Publications/Position%20papers%20and%20reports/TSO-DSO_ASM_2019_190416.pdf (accessed on 19 May 2021).
- European Parliament. Directive of 22 October 2014 on the Deployment of Alternative Fuels Infrastructure; European Parliament: Brussels, Belgium, 2014. [Google Scholar]
- Polish Act on Energy Law, April 10th 1997, (Dz. U. 1997, no. 54 Item 348). Available online: http://isap.sejm.gov.pl/isap.nsf/download.xsp/WDU19970540348/U/D19970348Lj.pdf (accessed on 19 May 2021).
- Polish Act on Renewable Energy Sources, February 20th 2015, (Dz. U. 2015, Item 478). Available online: https://isap.sejm.gov.pl/isap.nsf/download.xsp/WDU20150000478/U/D20150478Lj.pdf (accessed on 19 May 2021).
- Polish Act on Electromobility and Alternative Fuels; January 11th 2018, (Dz. U. 2018, Poz. 317). Available online: http://prawo.sejm.gov.pl/isap.nsf/download.xsp/WDU20180000317/T/D20180317L.pdf (accessed on 19 May 2021).
- Project of the Amendment to Polish Energy Law—Version from May 2021. Available online: http://orka.sejm.gov.pl/proc9.nsf/ustawy/808_u.htm (accessed on 19 May 2021).
- Project of the Amendment to Polish Energy Law- Version from January 2020. Available online: https://legislacja.rcl.gov.pl/docs//2/12317354/12543057/12543058/dokument437524.pdf (accessed on 19 May 2021).
- Bointner, R.; Toleikyte, A.; Atanasiu, B.; Woods, R.; De Ferrari, A.; Farinea, C.; Noris, R. Shopping Malls Features in EU-28 and Norway. Report Elaborated under the FP7 Project CommONEnergy: Re-Conceptualising Shopping Malls from Consumerism to Energy Conservation. 2014. Available online: https://www.researchgate.net/publication/273717258_Shopping_malls_features_in_EU-28_and_Norway_Report_elaborated_under_the_FP7_project_CommONEnergy_Re-conceptualising_shopping_malls_from_consumerism_to_energy_conservation (accessed on 19 May 2021).
- Nissan Leaf Technical Data. Available online: https://www-europe.nissan-cdn.net/content/dam/Nissan/pl/brochures/Techdata/leaf-dane-techniczne.pdf (accessed on 19 May 2021).
- Kia Soul Technical Data. Available online: https://www.kia.com/content/dam/kwcms/kme/uk/en/assets/vehicles/all-new-soul-ev/Specification/all-new-soul-ev-specification.pdf (accessed on 19 May 2021).
- Nissan E-NV200 Technical Data. Available online: https://www-europe.nissan-cdn.net/content/dam/Nissan/pl/brochures/Techdata/env200-dane-techniczne.pdf (accessed on 19 May 2021).
- BMW i3 Technical Data. Available online: https://www.bmw.pl/pl/all-models/bmw-i/i3/2020/bmw-i3-dane-techniczne.html (accessed on 19 May 2021).
- Khalkhali, H.; Hosseinian, S. Multi-class EV charging and performance-based regulation service in a residential smart parking lot. Sustain. Energy GridsNetw. 2020, 22, 100354. [Google Scholar] [CrossRef]
- Ayyadi, S.; Maaroufi, M.; Arif, S.M. EVs charging and discharging model consisted of EV Users Behavior. In Proceedings of the 5th International Conference on Renewable Energies for Developing Countries (REDEC), Marrakech, Morocco, 29–30 June 2020. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Period | Name of the Project | Location | Field of Research |
|---|---|---|---|
| 2016–2019 | Parker | Denmark | Frequency regulation Ageing of battery packs |
| 2018–2021 | Redispatch V2G | Germany | Demand reduction in transmission grid |
| 2014–2019 | City-Zen | The Netherlands | Integration of different customer groups within V2G |
| 2014–2019 | Smart Solar Charging | The Netherlands, Utrecht, | Implementation of V2G on AC grid |
| 2017–2019 | Grid Motion | France | Frequency regulation with V2G mechanisms |
| 2015–2017 | Korean V2G | South Korea | Optimization of depth of discharge (DoD) battery in EV |
| 2012–2016 | JumpSmartMaui | USA, Hawaii, Maui | Frequency regulation Demand side management |
| 2017–2020 | Invent | USA, San Diego | Integration of mobile energy storages with Smart Grid |
| 2017–2020 | Network Impact of Grid-integrated Vehicles | Great Britain | Impact of EV on operation of the grid, power quality etc. |
| Missing Legislative Aspect | Suggestion | Priority of Introduction |
|---|---|---|
| Lack of inclusion of mobile energy storage in the definition of energy storage facility | Inclusion and acknowledgement of the electric vehicle as an energy storage facility | Critical |
| Lack of definition of bi-directional charging point | Amending the Energy Law in Poland as soon as possible | Critical |
| Lack of market for V2G services or energy storage services | Providing a legal framework for the setting up of a market for V2G or energy storage services | Critical |
| TSO is solely responsible for purchasing ancillary services | TSO and DSO should have their own pools of ancillary service | Critical |
| Lack of a coherent definition of energy storage facility in multiple acts | Development of one coherent definition in the Act on Energy Law | High |
| Lack of regulations applicable to EV users intending to use V2G | Establishing a legal framework for efficient discharging of EVs e.g., priority access to selected bi-directional charging points. | High |
| Lack of role allocation between the DSO and the Charging System Operator | Establishing the roles of the DSO and the Charging System Operator | Average |
| Lack of provisions concerning the participation of the Energy Regulatory Office (ERO) in the establishment of V2G Program | Active cooperation between government, ERO and relevant parties | Low |
| Parameter | Values | Remarks |
|---|---|---|
| Battery capacity Ci (kWh) | Based on technical data of EV [64,65,66,67] and also [46] | |
| SOCt,i—current State-of-Charge (SOC) in the time t (%) | Upper limit is defined by maximum SOC based on [46,68] | |
| SOCf,i—State-of-Charge required for the next journey (%) | Estimated values that provide a range of EV at least 50 km, assuming that the average energy consumption of an EV is equal to 0.2 kWh/km [10,69] | |
| SOC0,i—minimal State-of-Charge limited by technical constraints | Based on [27,46,69] | |
| ηd—efficiency of discharging process | Based on [27,69] | |
| R—a reserve, which considers the possible lengthening of the route | Considering range of 50 km, additional reserve should allow extend the range by 2.5 km. |
| Parameter | Value |
|---|---|
| P(uEV)—probability of providing V2G service by V2G Participant | |
| P(V2Gsp)—probability of providing V2G service by V2G Service Provider; | |
| P(EndUs)—probability of providing V2G service by end-user; | |
| P(A)—total probability of providing V2G service |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zagrajek, K.; Paska, J.; Sosnowski, Ł.; Gobosz, K.; Wróblewski, K. Framework for the Introduction of Vehicle-to-Grid Technology into the Polish Electricity Market. Energies 2021, 14, 3673. https://doi.org/10.3390/en14123673
Zagrajek K, Paska J, Sosnowski Ł, Gobosz K, Wróblewski K. Framework for the Introduction of Vehicle-to-Grid Technology into the Polish Electricity Market. Energies. 2021; 14(12):3673. https://doi.org/10.3390/en14123673
Chicago/Turabian StyleZagrajek, Krzysztof, Józef Paska, Łukasz Sosnowski, Konrad Gobosz, and Konrad Wróblewski. 2021. "Framework for the Introduction of Vehicle-to-Grid Technology into the Polish Electricity Market" Energies 14, no. 12: 3673. https://doi.org/10.3390/en14123673
APA StyleZagrajek, K., Paska, J., Sosnowski, Ł., Gobosz, K., & Wróblewski, K. (2021). Framework for the Introduction of Vehicle-to-Grid Technology into the Polish Electricity Market. Energies, 14(12), 3673. https://doi.org/10.3390/en14123673