
Intelligent Transition Control between Grid-Connected and Standalone Modes of Three-Phase Grid-Integrated Distributed Generation Systems

 , ,
, ,  , and
, and 
Abstract
:1. Introduction
- Provide faster and efficient grid synchronization without compromising for both phase-angle and frequency deviations.
- Reduce the preparation time of the disconnection controller by estimating and adjusting the phase and voltage of the VSIs.
- Improve the operating condition of the system with a fuzzy controller during the transition process, especially under transients in the system operation.
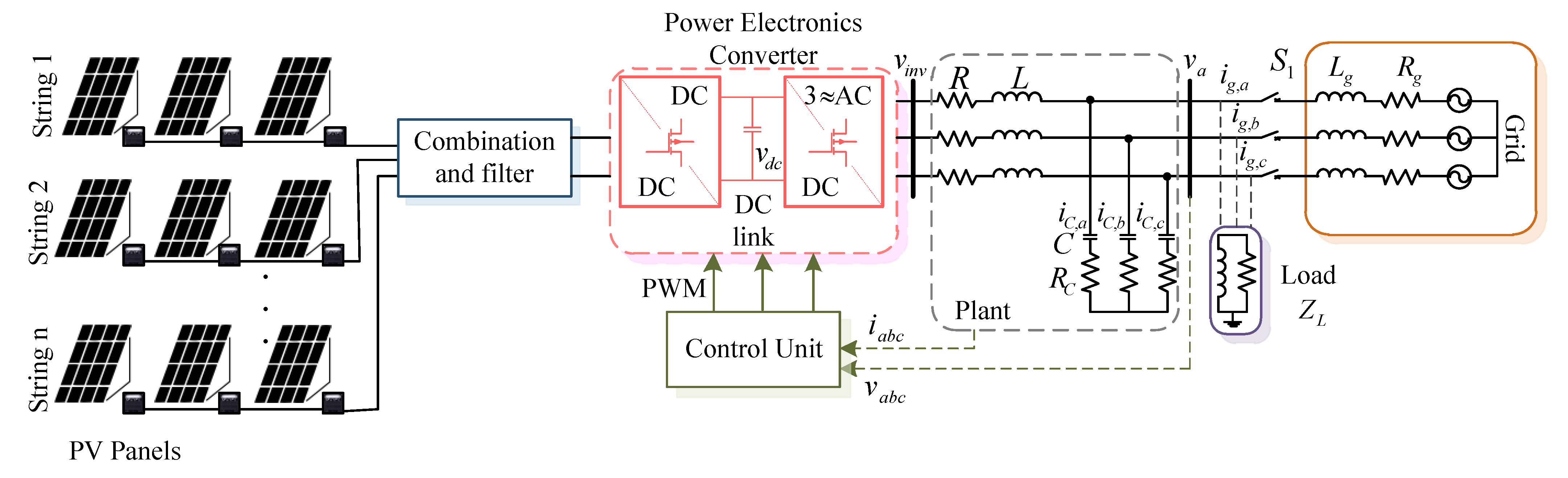
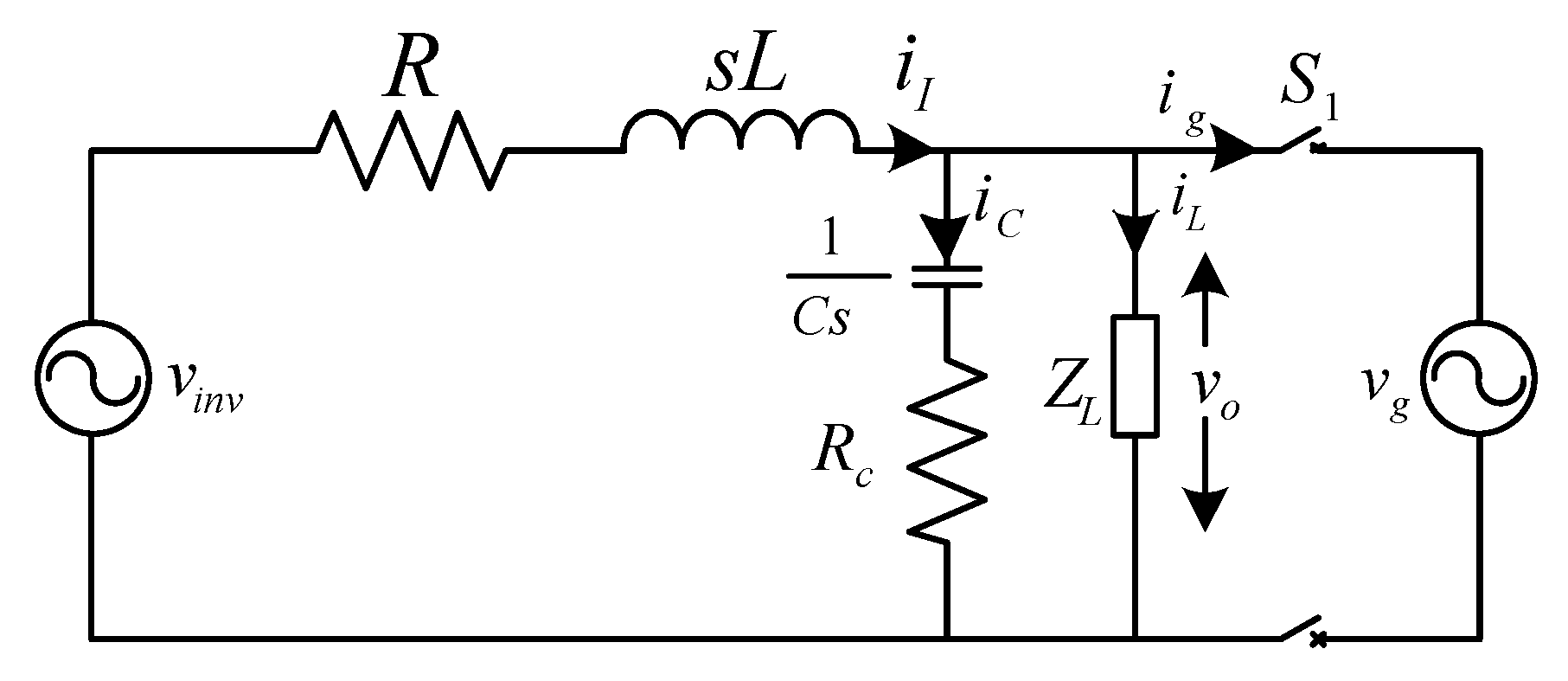
2. System Configuration and Model Derivation
3. Control Development for Voltage Source Inverter
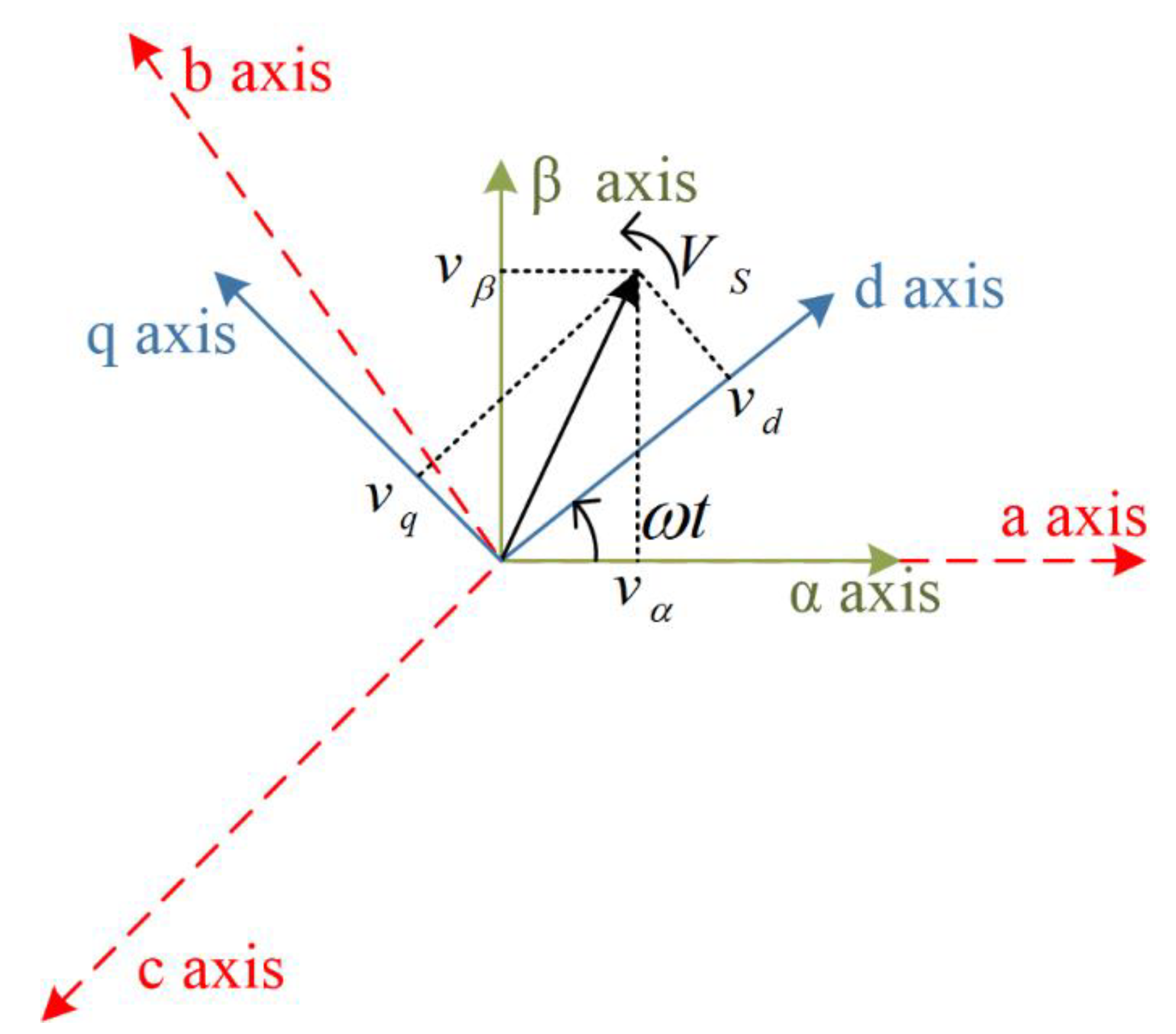
3.1. Reference Frame
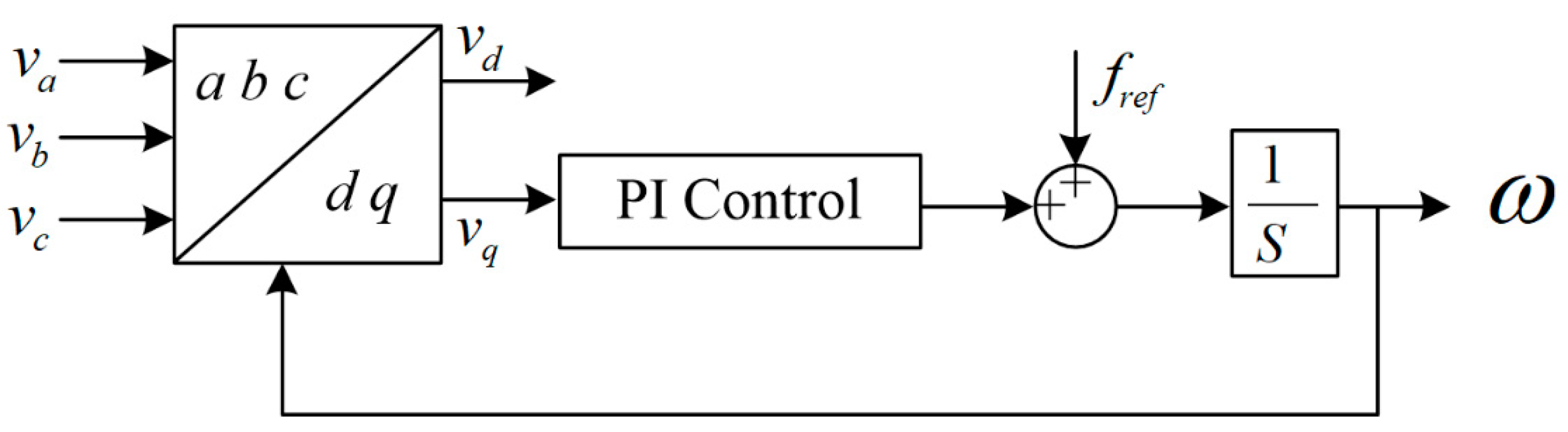
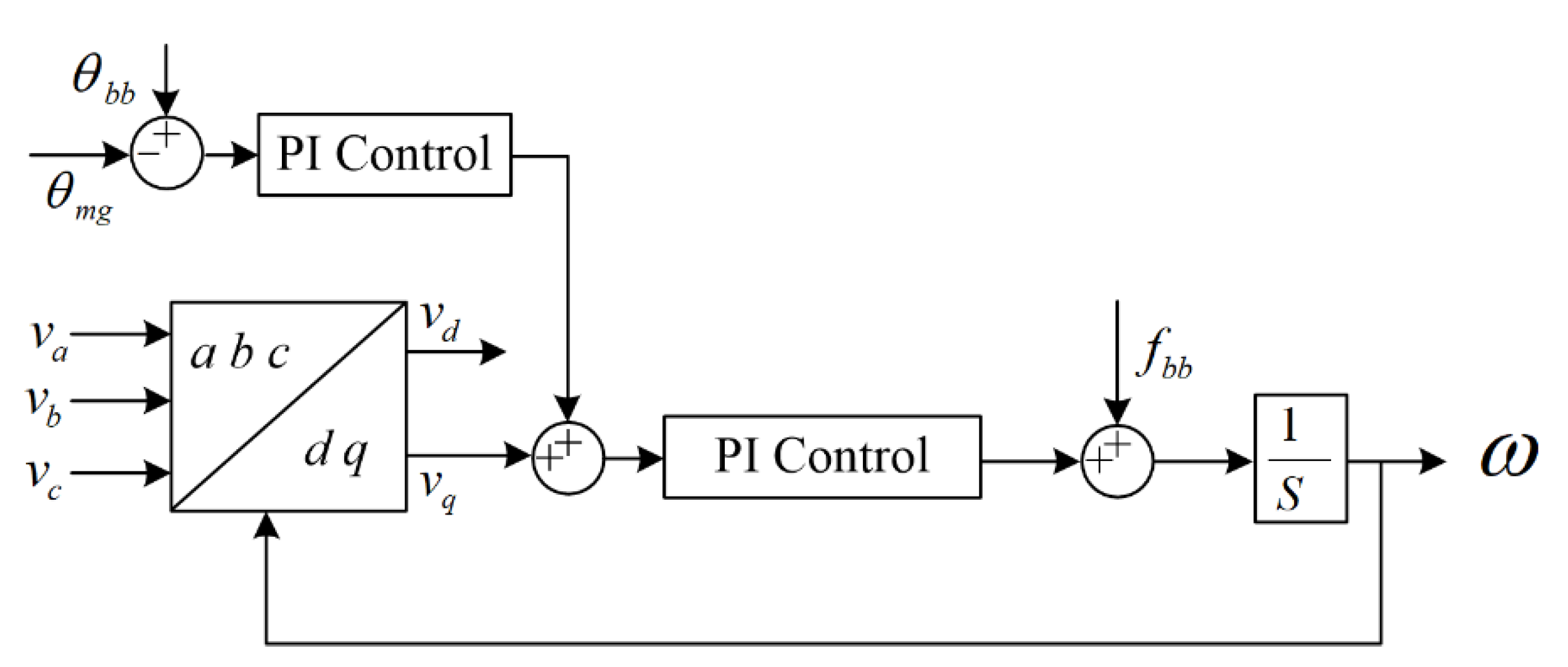
3.2. Phase-Locked Loop
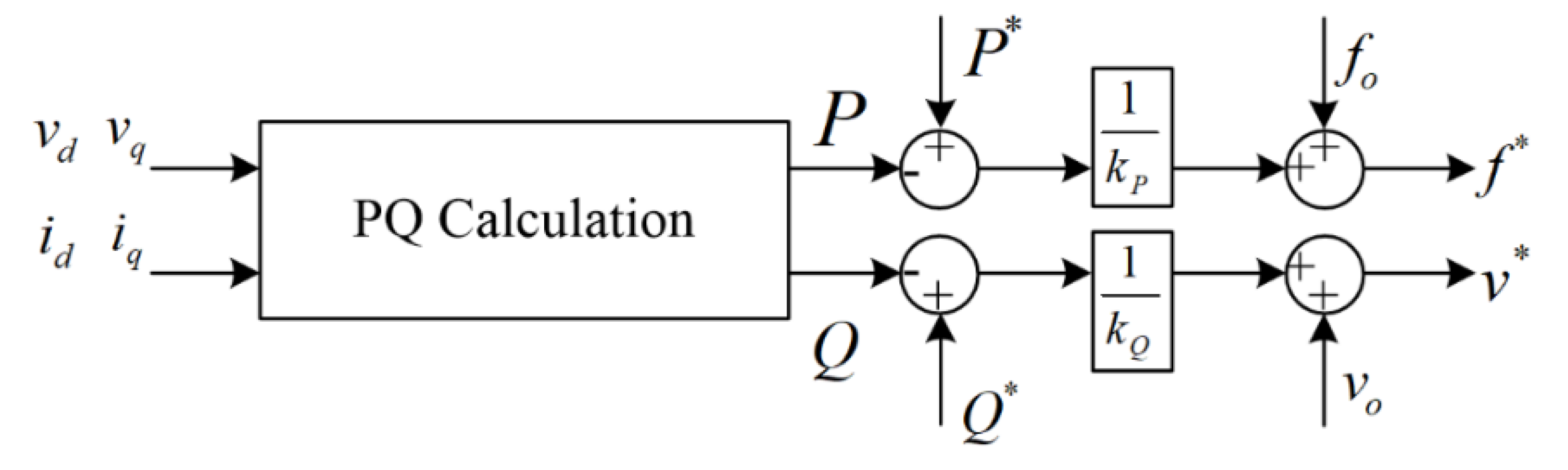
3.3. Droop Implementation
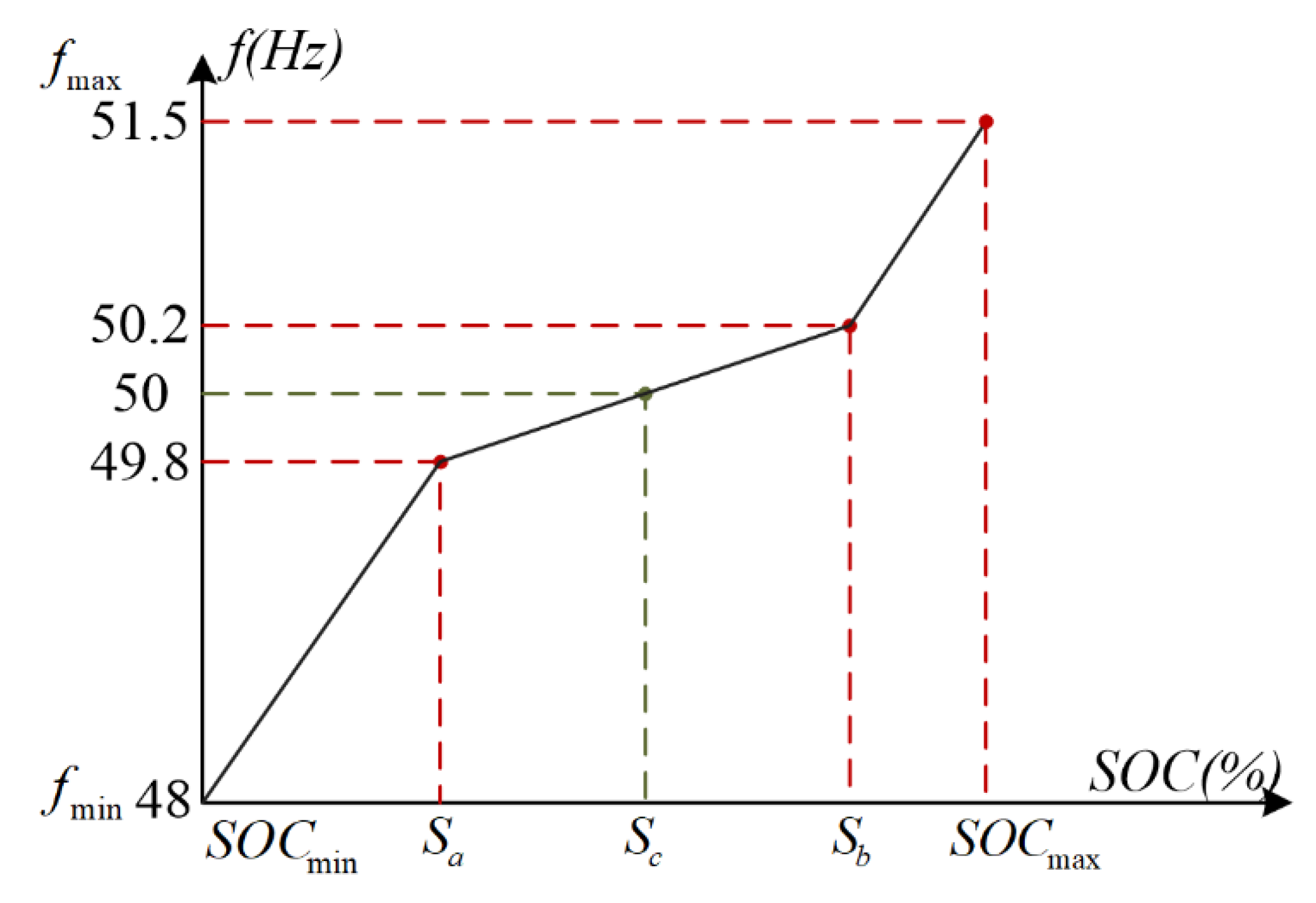
3.3.1. Frequency Setpoint
3.3.2. Voltage Controller
3.3.3. Virtual Impedance
3.3.4. Voltage Compensation
4. Seamless Transition Control
4.1. Transition from Grid-Connected to Standalone Mode
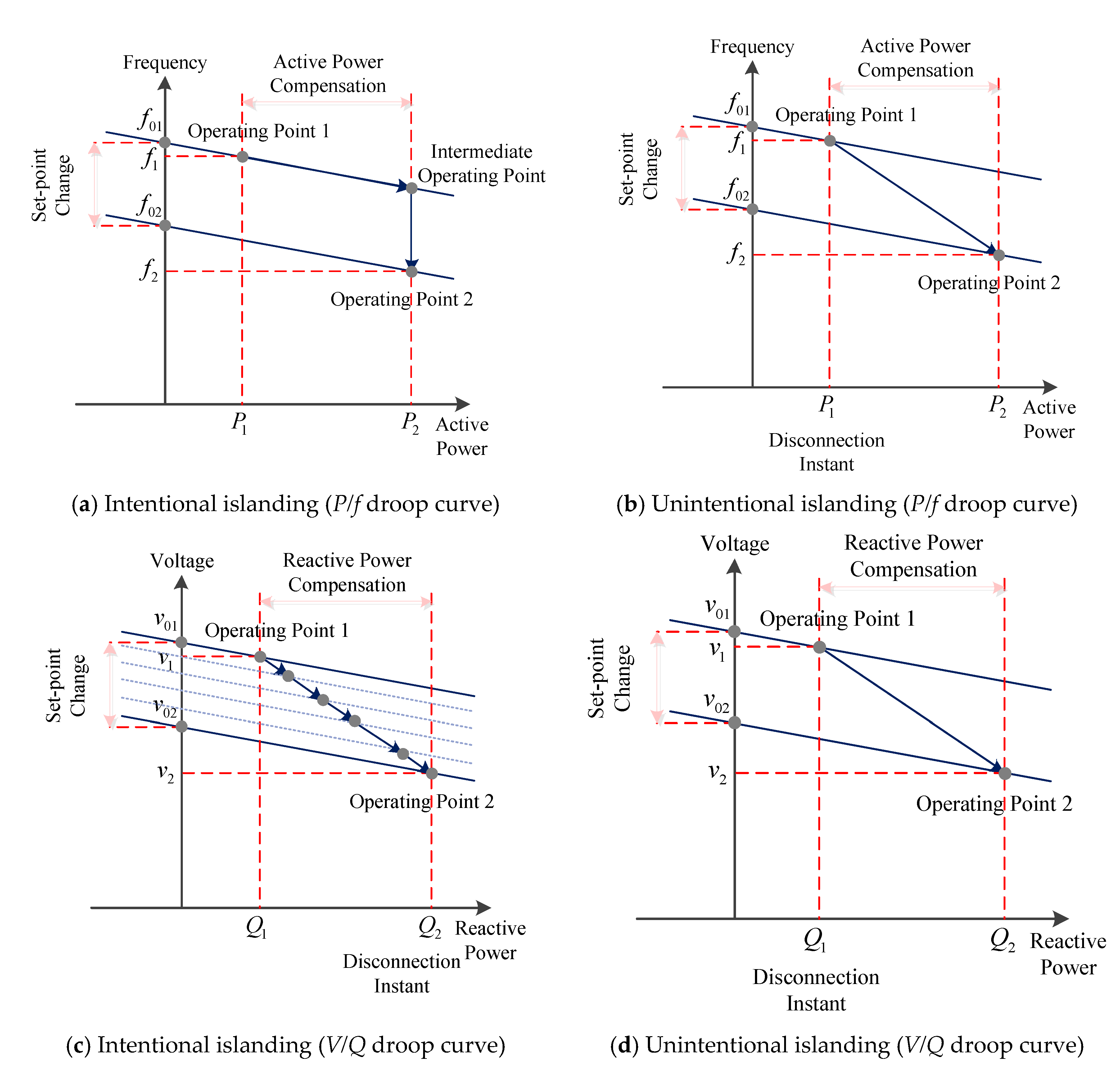
4.1.1. Intentional Islanding
4.1.2. Unintentional Islanding
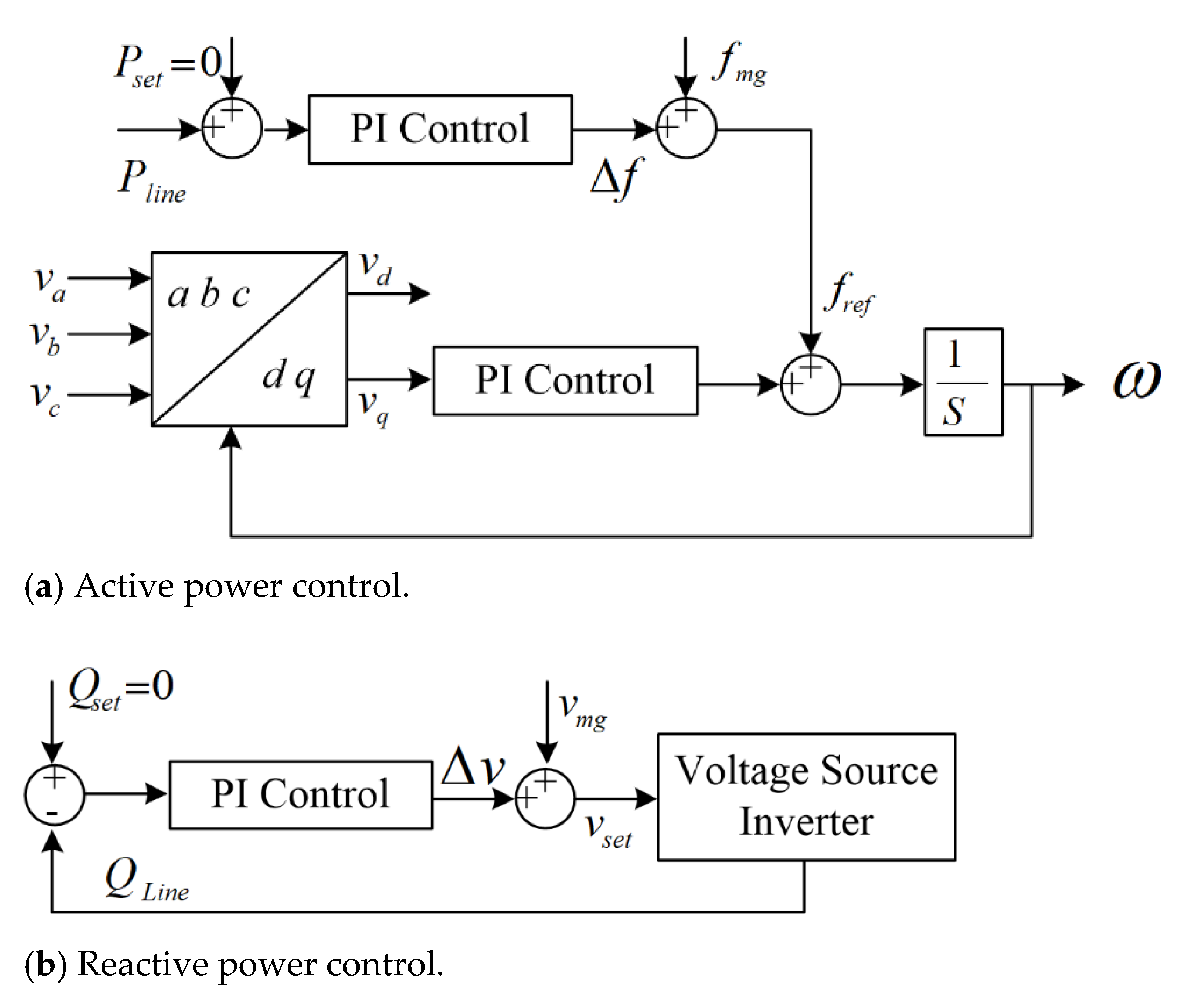
4.2. Transition from Standalone to Grid-Connected Mode
4.2.1. Voltage Synchronization
4.2.2. Phase and Frequency Synchronization
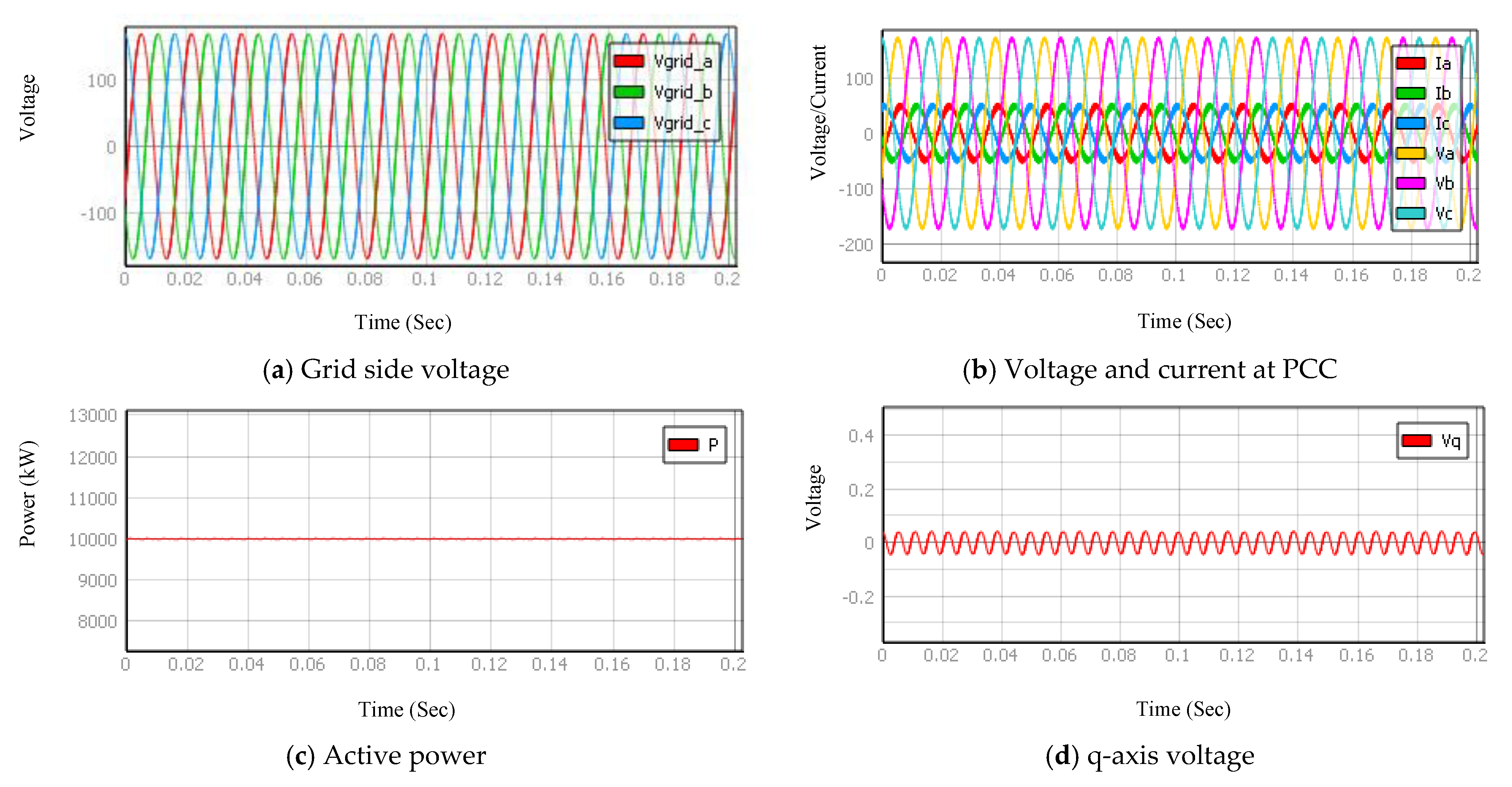
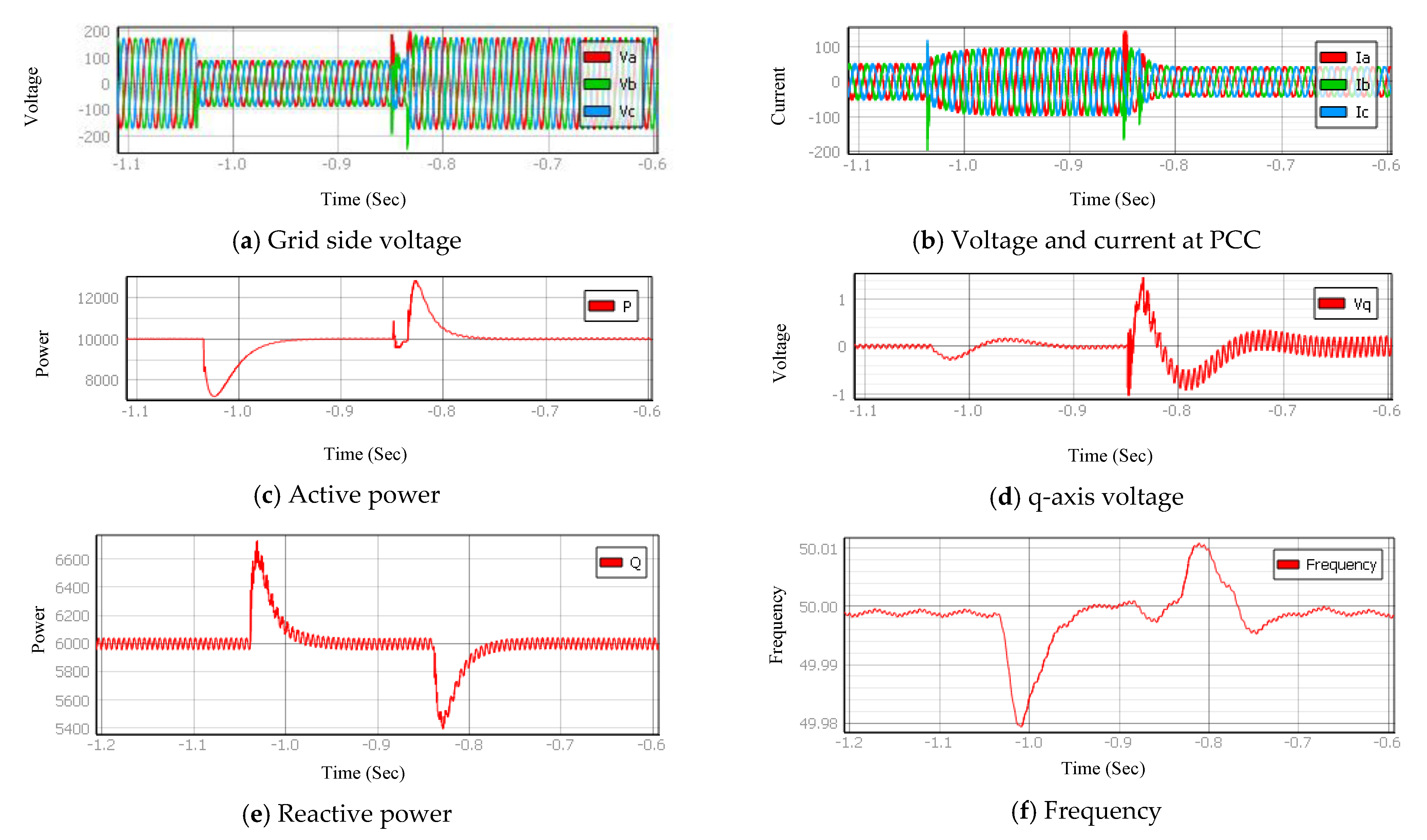
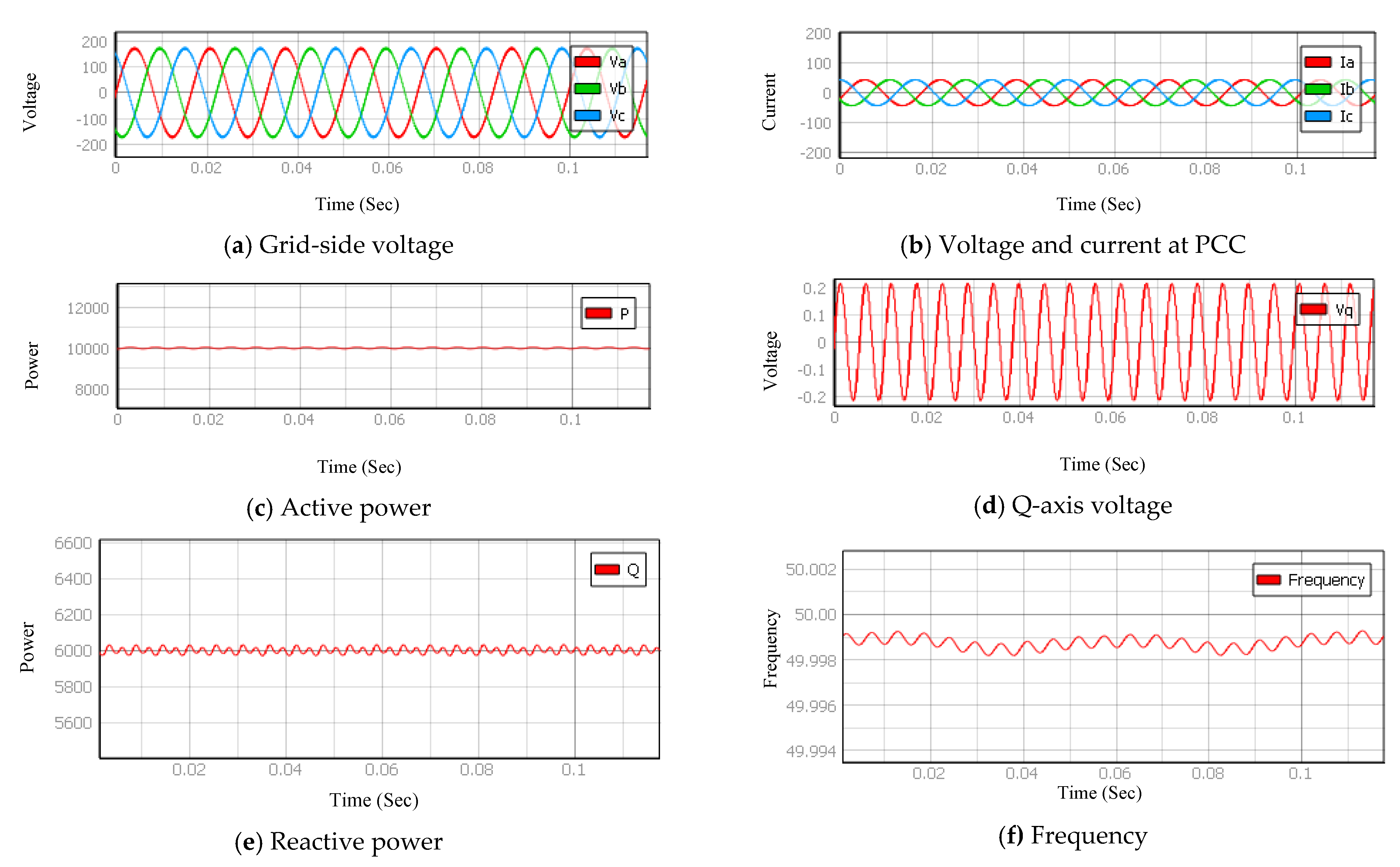
5. Numerical Simulations
- The fuzzy transition controller established the dynamic stability of the droop controller and achieved stable disconnection of a DG from the grid.
- The synchronization method using SRF-PLL estimates the phase angle during the grid synchronization and has significantly improved the synchronization performance.
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Dharani, R.; Balasubramonian, M.; Babu, T.S.; Nastasi, B. Load Shifting and Peak Clipping for Reducing Energy Consumption in an Indian University Campus. Energies 2021, 14, 558. [Google Scholar] [CrossRef]
- Amer, A.; Shaban, K.; Gaouda, A.; Massoud, A. Home Energy Management System Embedded with a Multi-Objective Demand Response Optimization Model to Benefit Customers and Operators. Energies 2021, 14, 257. [Google Scholar] [CrossRef]
- Rakhshani, E.; Rouzbehi, K.; Sánchez, A.J.; Tobar, A.C.; Pouresmaeil, E. Integration of Large Scale PV-Based Generation into Power Systems: A Survey. Energies 2019, 12, 1425. [Google Scholar] [CrossRef] [Green Version]
- Zhang, J.; Huang, L.; Shu, J.; Wang, H.; Ding, J. Energy Management of PV-diesel-battery Hybrid Power System for Island Stand-alone Micro-grid. Energy Procedia 2017, 105, 2201–2206. [Google Scholar] [CrossRef]
- Teodorescu, R.; Blaabjerg, F. Flexible Control of Small Wind Turbines with Grid Failure Detection Operating in Stand-Alone and Grid-Connected Mode. IEEE Trans. Power Electron. 2004, 19, 1323–1332. [Google Scholar] [CrossRef]
- Khan, M.A.; Kurukuru, V.S.B.; Haque, A.; Mekhilef, S. Islanding Classification Mechanism for Grid-Connected Photovoltaic Systems. IEEE J. Emerg. Sel. Top. Power Electron. 2021, 9, 1966–1975. [Google Scholar] [CrossRef]
- Khan, M.A.; Haque, A.; Kurukuru, V.S.B.; Saad, M. Advanced Control Strategy with Voltage Sag Classification for Single-Phase Grid-Connected Photovoltaic System. IEEE J. Emerg. Sel. Top. Ind. Electron. 2020. [Google Scholar] [CrossRef]
- Khan, M.A.; Haque, A.; Kurukuru, V.S.B. Dynamic Voltage Support for Low Voltage Ride Through Operation in Single-Phase Grid-Connected Photovoltaic Systems. IEEE Trans. Power Electron. 2021. [Google Scholar] [CrossRef]
- Fatama, A.Z.; Khan, M.A.; Kurukuru, V.S.B.; Haque, A.; Blaabjerg, F. Coordinated reactive power strategy using static synchronous compensator for photovoltaic inverters. Int. Trans. Electr. Energy Syst. 2020, 30. [Google Scholar] [CrossRef]
- Dong, N.; Thacker, T.; Cvetkovic, I.; Burgos, R.; Boroyevich, D.; Wang, F.; Skutt, G. Modes of Operation and System-Level Control of Single-Phase Bidirectional PWM Converter for Microgrid Systems. IEEE Trans. Smart Grid 2012, 3, 93–104. [Google Scholar] [CrossRef]
- Shi, K.; Zhou, G.; Xu, P.; Ye, H.; Tan, F. The Integrated Switching Control Strategy for Grid-Connected and Islanding Operation of Micro-Grid Inverters Based on a Virtual Synchronous Generator. Energies 2018, 11, 1544. [Google Scholar] [CrossRef] [Green Version]
- Yi, Z.; Dong, W.; Etemadi, A.H. A Unified Control and Power Management Scheme for PV-Battery-Based Hybrid Microgrids for Both Grid-Connected and Islanded Modes. IEEE Trans. Smart Grid 2018, 9, 5975–5985. [Google Scholar] [CrossRef]
- Karimi-Ghartemani, M.; Khajehoddin, S.A.; Piya, P.; Ebrahimi, M. Universal Controller for Three-Phase Inverters in a Microgrid. IEEE J. Emerg. Sel. Top. Power Electron. 2016, 4, 1342–1353. [Google Scholar] [CrossRef]
- Khan, M.A.; Haque, A.; Kurukuru, V.S.B.; Wang, H.; Blaabjerg, F. Standalone operation of Distributed Generation Systems with Improved Harmonic Elimination Scheme. IEEE J. Emerg. Sel. Top. Power Electron. 2021, 1. [Google Scholar] [CrossRef]
- Khan, M.A.; Haque, A.; Kurukuru, V.B. Performance assessment of stand-alone transformerless inverters. Int. Trans. Electr. Energy Syst. 2020, 30, 1–20. [Google Scholar] [CrossRef]
- Khan, M.A.; Haque, A.; Kurukuru, V.S.B. Intelligent control of a novel transformerless inverter topology for photovoltaic applications. Electr. Eng. 2020, 102, 627–641. [Google Scholar] [CrossRef]
- Khan, M.A.; Haque, A.; Kurukuru, V.S.B. Voltage-Balancing Control for Stand-Alone H5 Transformerless Inverters. In Lecture Notes in Electrical Engineering; Springer Science and Business Media LLC: Berlin, Germany, 2019; pp. 663–675. [Google Scholar]
- Arafat, N.; Palle, S.; Sozer, Y.; Husain, I. Transition Control Strategy Between Standalone and Grid-Connected Operations of Voltage-Source Inverters. IEEE Trans. Ind. Appl. 2012, 48, 1516–1525. [Google Scholar] [CrossRef]
- Sreekumar, T.; Jiji, K. Comparison of Proportional-Integral (P-I) and Integral-Proportional (I-P) controllers for speed control in vector controlled induction Motor drive. In Proceedings of the 2012 2nd International Conference on Power, Control and Embedded Systems, Institute of Electrical and Electronics Engineers, Allahabad, India, 17–19 December 2012; pp. 1–6. [Google Scholar]
- Lim, K.; Choi, J. PR based indirect current control for seamless transfer of grid-connected inverter. In Proceedings of the 2016 IEEE 8th International Power Electronics and Motion Control Conference (IPEMC-ECCE Asia), Institute of Electrical and Electronics Engineers (IEEE), Hefei, China, 22–26 May 2016; pp. 3749–3755. [Google Scholar]
- Zong, X. A Single Phase Grid Connected DC/AC Inverter with Reactive Power Control for Residential PV Application. Master’s Degree, University of Toronto, Toronto, ON, Canada, 2011. [Google Scholar]
- Ibrahim-Mohamed, Y.; Radwan, A.A. Hierarchical Control System for Robust Microgrid Operation and Seamless Mode Transfer in Active Distribution Systems. IEEE Trans. Smart Grid 2011, 2, 352–362. [Google Scholar] [CrossRef]
- Li, X.; Zhang, H.; Shadmand, M.B.; Balog, R. Model Predictive Control of a Voltage-Source Inverter with Seamless Transition Between Islanded and Grid-Connected Operations. IEEE Trans. Ind. Electron. 2017, 64, 7906–7918. [Google Scholar] [CrossRef]
- Taul, M.G.; Wang, X.; Davari, P.; Blaabjerg, F. An Overview of Assessment Methods for Synchronization Stability of Grid-Connected Converters Under Severe Symmetrical Grid Faults. IEEE Trans. Power Electron. 2019, 34, 9655–9670. [Google Scholar] [CrossRef] [Green Version]
- Tsimtsios, A.; Voglitsis, D.; Perpinias, I.; Korkas, C.; Papanikolaou, N. On the Conflict between LVRT and Line Protection in LV Distribution Systems with PVs: A Current-Limitation-Based Solution. Energies 2019, 12, 2909. [Google Scholar] [CrossRef] [Green Version]
- Vegunta, S.; Higginson, M.; Kenarangui, Y.; Li, G.; Zabel, D.; Tasdighi, M.; Shadman, A. AC Microgrid Protection System Design Challenges—A Practical Experience. Energies 2021, 14, 2016. [Google Scholar] [CrossRef]
- Fatama, A.-Z.; Haque, A.; Khan, M.A. A Multi Feature Based Islanding Classification Technique for Distributed Generation Systems. In Proceedings of the 2019 International Conference on Machine Learning, Big Data, Cloud and Parallel Computing (COMITCon), Institute of Electrical and Electronics Engineers (IEEE), Haryana, India, 14–16 February 2019; pp. 160–166. [Google Scholar]
- Haque, A.; Alshareef, A.; Khan, A.I.; Alam, M.; Kurukuru, V.S.B.; Irshad, K. Data Description Technique-Based Islanding Classification for Single-Phase Grid-Connected Photovoltaic System. Sensors 2020, 20, 3320. [Google Scholar] [CrossRef]
- Khan, M.A.; Haque, A.; Kurukuru, V.B. An Efficient Islanding Classification Technique for Single Phase Grid Connected Photovoltaic System. In Proceedings of the 2019 International Conference on Computer and Information Sciences (ICCIS), Institute of Electrical and Electronics Engineers, Aljouf, Saudi Arabia, 10–11 April 2019; pp. 1–6. [Google Scholar]
- Levron, Y.; Belikov, J.; Baimel, D. A Tutorial on Dynamics and Control of Power Systems with Distributed and Renewable Energy Sources Based on the DQ0 Transformation. Appl. Sci. 2018, 8, 1661. [Google Scholar] [CrossRef] [Green Version]
- Kulkarni, A.; John, V. Design of synchronous reference frame phase-locked loop with the presence of dc offsets in the input voltage. IET Power Electron. 2015, 8, 2435–2443. [Google Scholar] [CrossRef] [Green Version]
- Golestan, S.; Guerrero, J. Conventional Synchronous Reference Frame Phase-Locked Loop is an Adaptive Complex Filter. IEEE Trans. Ind. Electron. 2015, 62, 1679–1682. [Google Scholar] [CrossRef] [Green Version]
- Khan, M.A.; Haque, A.; Kurukuru, V.S.B. Droop based Low voltage ride through implementation for grid integrated photovoltaic system. In Proceedings of the 2019 International Conference on Power Electronics, Control and Automation (ICPECA), Institute of Electrical and Electronics Engineers (IEEE), New Delhi, India, 16–17 November 2019; pp. 1–5. [Google Scholar]
- Toub, M.; Bijaieh, M.M.; Weaver, W.W.; Iii, R.D.R.; Maaroufi, M.; Aniba, G. Droop Control in DQ Coordinates for Fixed Frequency Inverter-Based AC Microgrids. Electronics 2019, 8, 1168. [Google Scholar] [CrossRef] [Green Version]
- Gao, D.W. Coordinated Frequency Regulation of BESS with Renewable Generation in Microgrid. In Energy Storage for Sustainable Microgrid; Elsevier BV: Amsterdam, The Netherlands, 2015; pp. e1–e68. [Google Scholar]
- Li, R. Grid-connected power conversion of distributed resources. In Distributed Power Resources; Elsevier BV: Amsterdam, The Netherlands, 2019; pp. 19–50. [Google Scholar]
- Lyu, Z.; Wei, Q.; Zhang, Y.; Zhao, J.; Manla, E. Adaptive Virtual Impedance Droop Control Based on Consensus Control of Reactive Current. Energies 2018, 11, 1801. [Google Scholar] [CrossRef] [Green Version]
- He, J.; Li, Y.W. Analysis, Design, and Implementation of Virtual Impedance for Power Electronics Interfaced Distributed Generation. IEEE Trans. Ind. Appl. 2011, 47, 2525–2538. [Google Scholar] [CrossRef]
- Saleh, M.; Esa, Y.; El Hariri, M.; Mohamed, A. Impact of Information and Communication Technology Limitations on Microgrid Operation. Energies 2019, 12, 2926. [Google Scholar] [CrossRef] [Green Version]
- Aleem, S.A.; Hussain, S.M.S.; Ustun, T.S. A Review of Strategies to Increase PV Penetration Level in Smart Grids. Energies 2020, 13, 636. [Google Scholar] [CrossRef] [Green Version]
- Tran, T.S.; Nguyen, D.T.; Fujita, G. The Analysis of Technical Trend in Islanding Operation, Harmonic Distortion, Stabilizing Frequency, and Voltage of Islanded Entities. Resources 2019, 8, 14. [Google Scholar] [CrossRef] [Green Version]
- Das, D.; Gurrala, G.; Shenoy, U.J. Transition between grid-connected mode and islanded mode in VSI-fed microgrids. Sadhana 2017, 42, 1239–1250. [Google Scholar] [CrossRef]
- Bubshait, A.; Simoes, M.G. Design of Fuzzy Logic-Based Dynamic Droop Controller of Wind Turbine System for Primary Frequency Support. In Proceedings of the 2018 IEEE Industry Applications Society Annual Meeting (IAS), Institute of Electrical and Electronics Engineers, Portland, OR, USA, 23–27 September 2018; pp. 1–7. [Google Scholar]
- Yadav, M.; Jaiswal, P.; Singh, N. Fuzzy Logic-Based Droop Controller for Parallel Inverter in Autonomous Microgrid Using Vectored Controlled Feed-Forward for Unequal Impedance. J. Inst. Eng. India Ser. B 2021, 1–15. [Google Scholar] [CrossRef]
- Srinivasan, D.; Liew, A.; Chang, C. Applications of fuzzy systems in power systems. Electr. Power Syst. Res. 1995, 35, 39–43. [Google Scholar] [CrossRef]
- Yadaiah, N.; Babu, C.V.S.R.K.; Bhattacharya, J. Fuzzy logic controllers—An application to power systems. In Proceedings of the 2003 IEEE International Workshop on Soft Computing in Industrial Applications, 2003. SMCia/03., Institute of Electrical and Electronics Engineers (IEEE), Binghamton, NY, USA, 25–25 June 2003; pp. 1–6. [Google Scholar]
- Sousa, G.C.D.; Bose, B.K. Fuzzy logic applications to power electronics and drives-an overview. In Proceedings of the Proceedings of IECON ’95 –21st Annual Conference on IEEE Industrial Electronics, Institute of Electrical and Electronics Engineers (IEEE), Toronto, ON, Canada, 13–16 October 2002; Volume 1, pp. 57–62. [Google Scholar]
- Rodrigues, E.M.G.; Godina, R.; Pouresmaeil, E. Industrial Applications of Power Electronics. Electron. 2020, 9, 1534. [Google Scholar] [CrossRef]
- Islam, R.; Hasan, J.; Shipon, R.R.; Sadi, M.A.H.; Abuhussein, A.; Roy, T.K. Neuro Fuzzy Logic Controlled Parallel Resonance Type Fault Current Limiter to Improve the Fault Ride Through Capability of DFIG Based Wind Farm. IEEE Access 2020, 8, 115314–115334. [Google Scholar] [CrossRef]
- Notholt, A. Germany’s new code for generation plants connected to medium-voltage networks and its repercussion on inverter control. Renew. Energy Power Qual. J. 2009, 1, 716–720. [Google Scholar] [CrossRef]
- Kumar, P.; Singh, A.K. Grid Codes: Goals and Challenges. Smart Sustain. Plan. Cities Reg. 2014, 17–39. [Google Scholar] [CrossRef]
- Craciun, B.-I.; Kerekes, T.; Sera, D.; Teodorescu, R. Overview of recent Grid Codes for PV power integration. In Proceedings of the 2012 13th International Conference on Optimization of Electrical and Electronic Equipment (OPTIM), Institute of Electrical and Electronics Engineers, Brasov, Romania, 24–26 May 2012; pp. 959–965. [Google Scholar]
- Eto, J.; Lasseter, R.; Schenkman, B.; Stevens, J.; Klapp, D.; VolkommeRr, H.; Linton, E.; Hurtado, H.; Roy, J. Overview of the CERTS Microgrid laboratory Test Bed. In Proceedings of the 2009 CIGRE/IEEE PES Joint Symposium Integration of Wide-Scale Renewable Resources into the Power Delivery System, Alberta, CA, Canada, 29–31 July 2009; p. 1. [Google Scholar]
- IEEE Std 1547-2003. IEEE Standard for Interconnecting Distributed Resources with Electric Power Systems; IEEE: Piscataway, NJ, USA, 2003; ISBN 978-0-7381-3721-6. [Google Scholar]
- IEEE Std 1547-2014. IEEE Standard for Interconnecting Distributed Resources with Electric Power Systems; IEEE: Piscataway, NJ, USA, 2014. [Google Scholar]
- IEEE Std 1547-2018. IEEE Standard for Interconnection and Interoperability of Distributed Energy Resources with Associated Electric Power Systems Interfaces; IEEE: Piscataway, NJ, USA, 2018. [Google Scholar]
- Laaksonen, H. Protection Scheme for Island Operated Medium-Voltage Microgrid. Int. Rev. Electr. Eng. (IREE) 2015, 10, 510. [Google Scholar] [CrossRef]
- Wang, X.; Taul, M.G.; Wu, H.; Liao, Y.; Blaabjerg, F.; Harnefors, L. Grid-Synchronization Stability of Converter-Based Resources—An Overview. IEEE Open J. Ind. Appl. 2020, 1, 115–134. [Google Scholar] [CrossRef]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| System Parameter | Specification |
|---|---|
| DG Power Output | |
| DC Link Capacitor | |
| DC Link Voltage | |
| Inverter Rating | |
| Inverter Switching Frequency | |
| Filter Resistance | |
| Filter Inductance | |
| Filter Capacitance | |
| Damping Resistance | |
| Grid-Side Inductance | |
| Grid-Side Resistance | |
| Total Battery Capacity |
| Controller | Initial Phase Angle Difference | Synchronization Time |
|---|---|---|
| Droop Controller | 2.95 rad | 3 s |
| Fuzzy Transition Controller | 2.9 rad | 0.6 s |
| Condition | Droop Controller (Conventional Approach) | Fuzzy Transition Controller (Developed Approach) | ||||
|---|---|---|---|---|---|---|
| Droop Gain [Hz/W] | Response Time [s] | Oscillation Level [%] | Fuzzy | Response Time [s] | Oscillation Level [%] | |
| Normal Operation | 0.1 | 0.18 | 0.19 | Fuzzy Rules | 0.076 | 0.07 |
| Unintentional Islanding | 0.07 | 0.47 | 0.49 | Fuzzy Rules | 0.115 | 0.17 |
| Grid Synchronization | 0.05 | 0.43 | 0.35 | Fuzzy Rules | 0.092 | 0.14 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Khan, M.A.; Haque, A.; Blaabjerg, F.; Kurukuru, V.S.B.; Wang, H. Intelligent Transition Control between Grid-Connected and Standalone Modes of Three-Phase Grid-Integrated Distributed Generation Systems. Energies 2021, 14, 3979. https://doi.org/10.3390/en14133979
Khan MA, Haque A, Blaabjerg F, Kurukuru VSB, Wang H. Intelligent Transition Control between Grid-Connected and Standalone Modes of Three-Phase Grid-Integrated Distributed Generation Systems. Energies. 2021; 14(13):3979. https://doi.org/10.3390/en14133979
Chicago/Turabian StyleKhan, Mohammed Ali, Ahteshamul Haque, Frede Blaabjerg, Varaha Satya Bharath Kurukuru, and Huai Wang. 2021. "Intelligent Transition Control between Grid-Connected and Standalone Modes of Three-Phase Grid-Integrated Distributed Generation Systems" Energies 14, no. 13: 3979. https://doi.org/10.3390/en14133979
APA StyleKhan, M. A., Haque, A., Blaabjerg, F., Kurukuru, V. S. B., & Wang, H. (2021). Intelligent Transition Control between Grid-Connected and Standalone Modes of Three-Phase Grid-Integrated Distributed Generation Systems. Energies, 14(13), 3979. https://doi.org/10.3390/en14133979