
A Review of Reduction Methods of Impact of Common-Mode Voltage on Electric Drives


Abstract
:1. Introduction
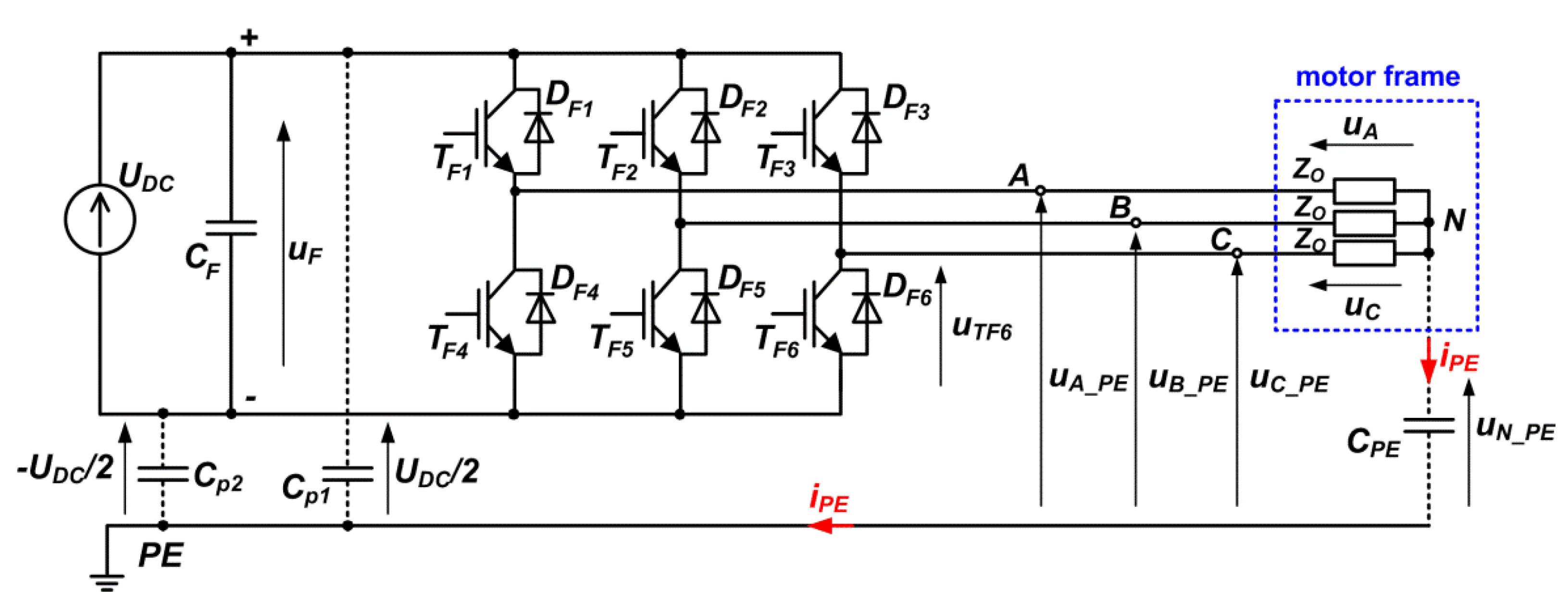
2. Mechanism of Common-Mode Voltage Generation in Electric Drive Fed by a Conventional Hard-Switched Two-Level Bridge Voltage Inverter
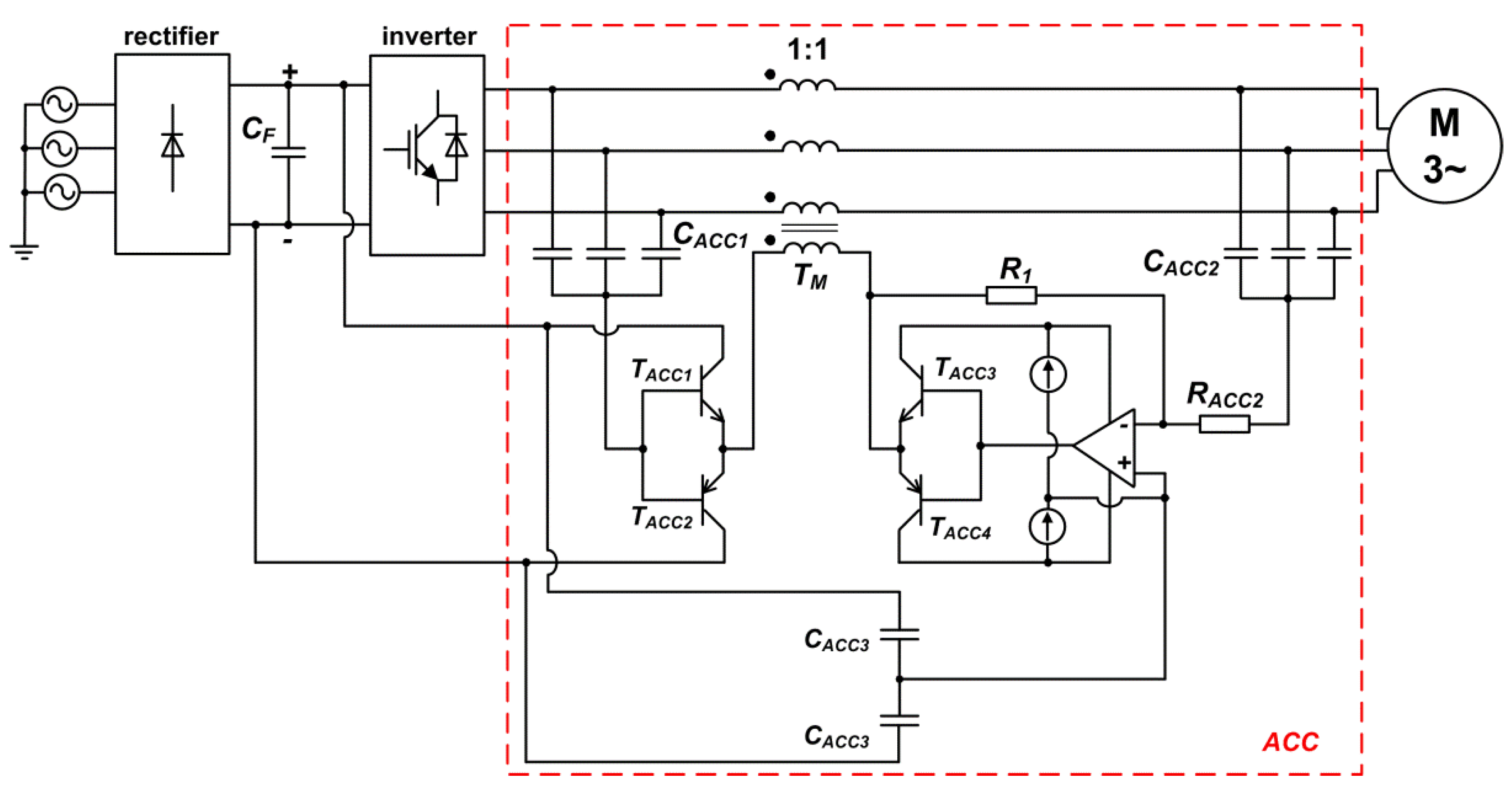
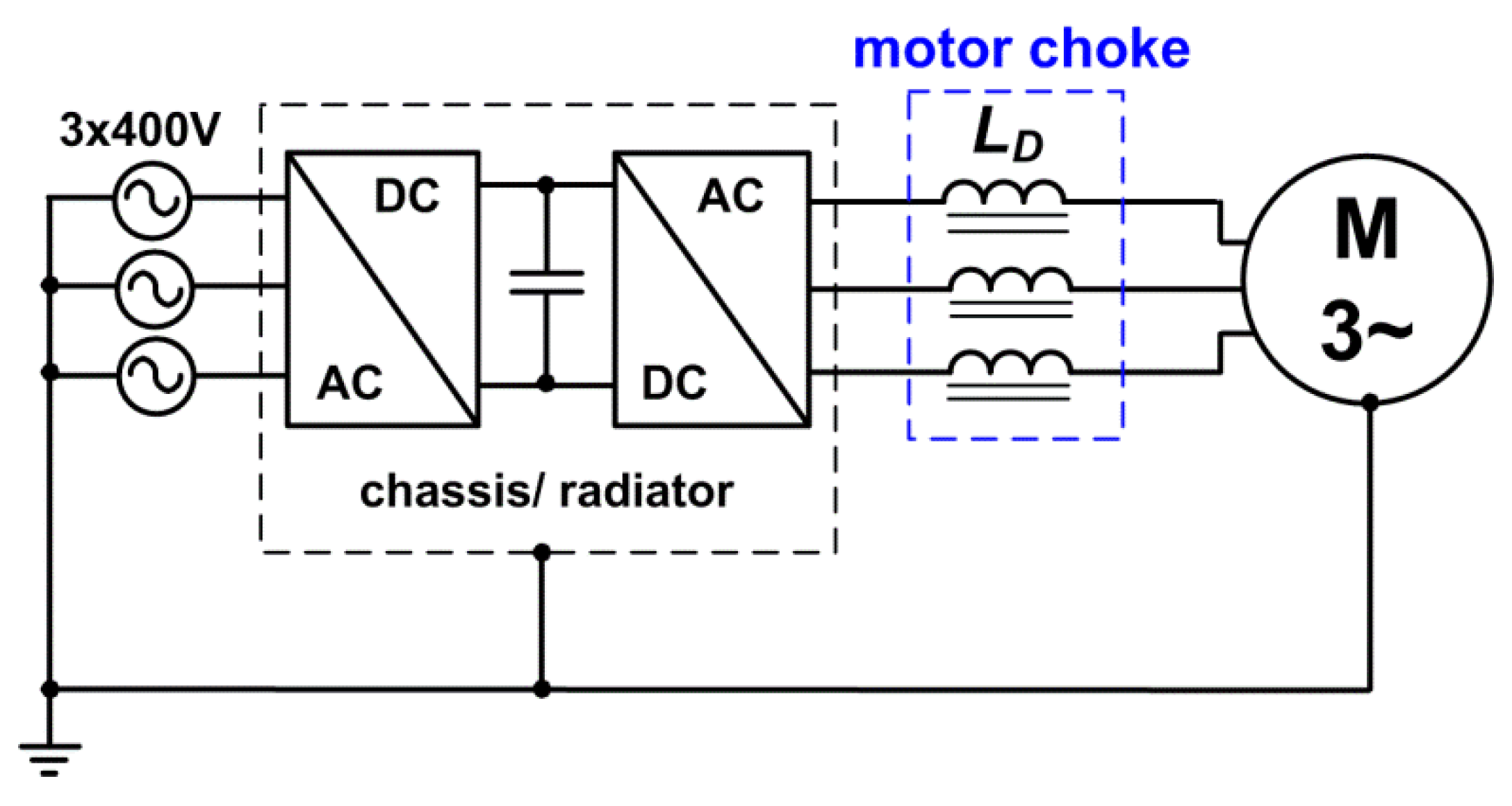
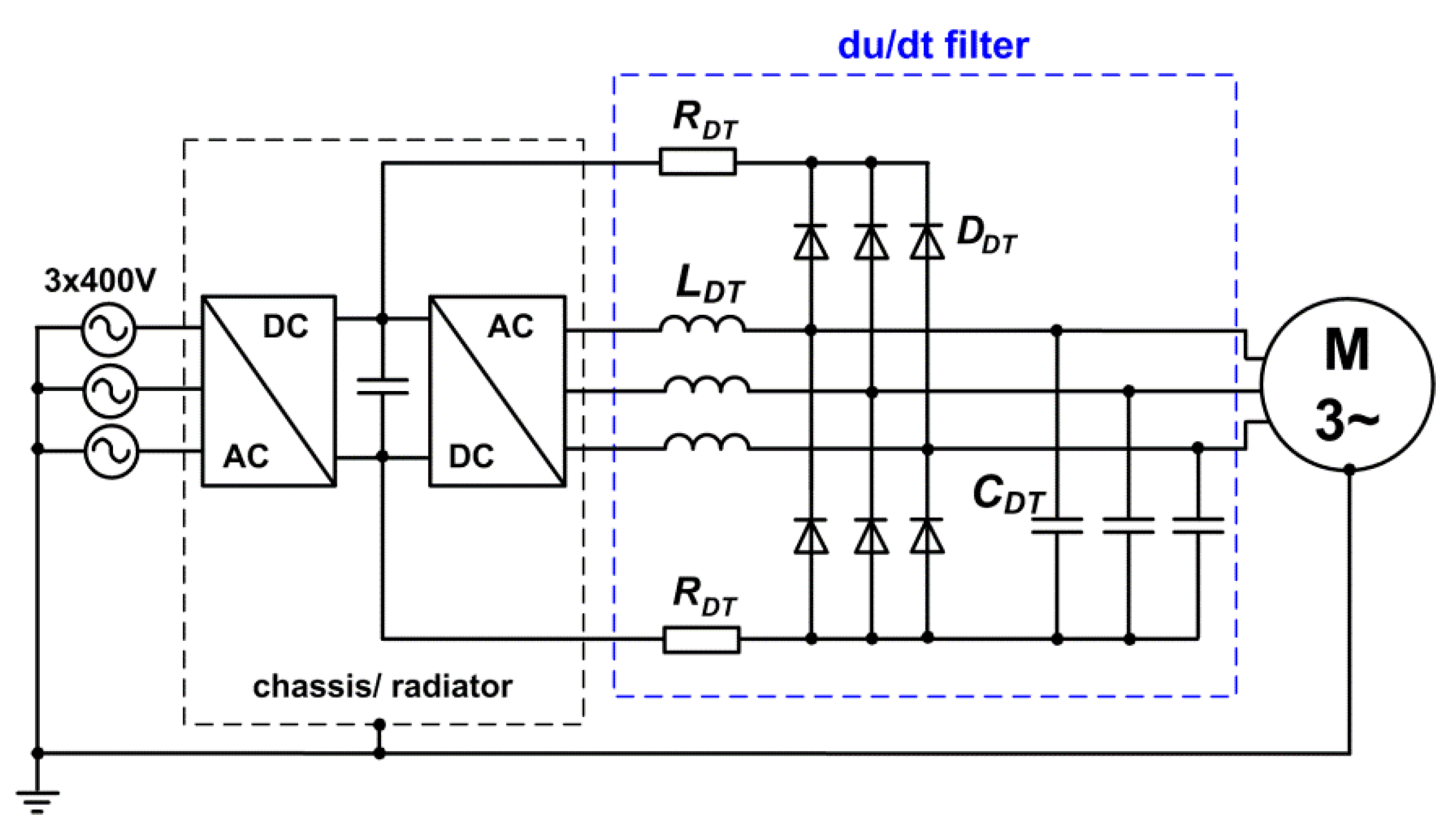
3. Review of Methods Dedicated to CM Voltage Reduction and Limiting Negative Effects Resulting from uN_PE Voltage Impact
4. Experimental Results
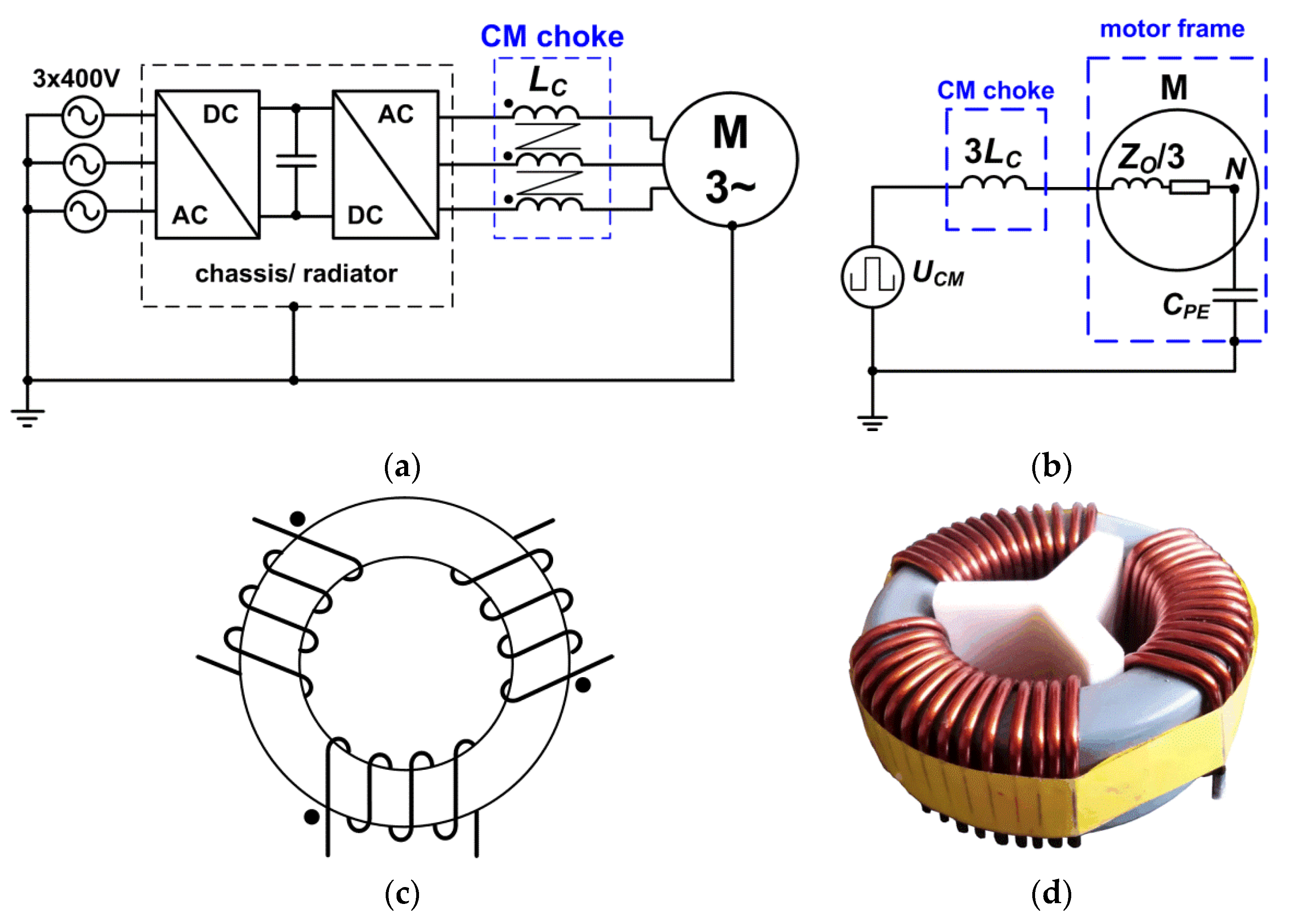
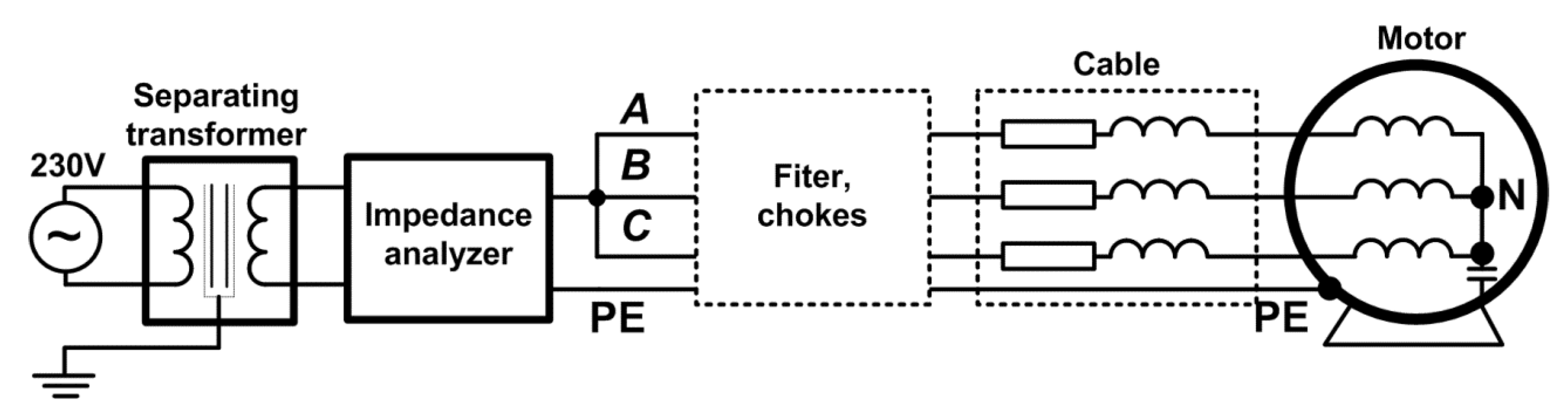
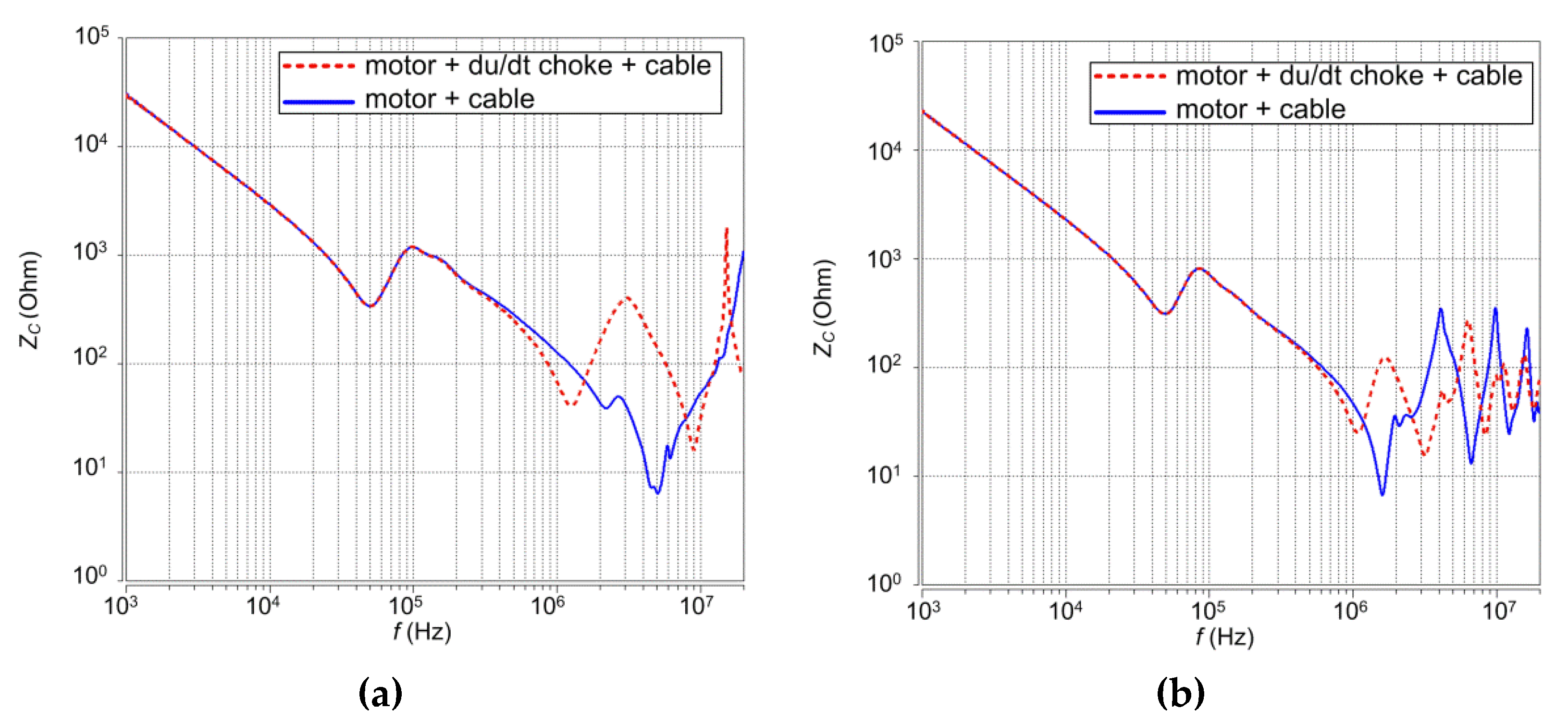
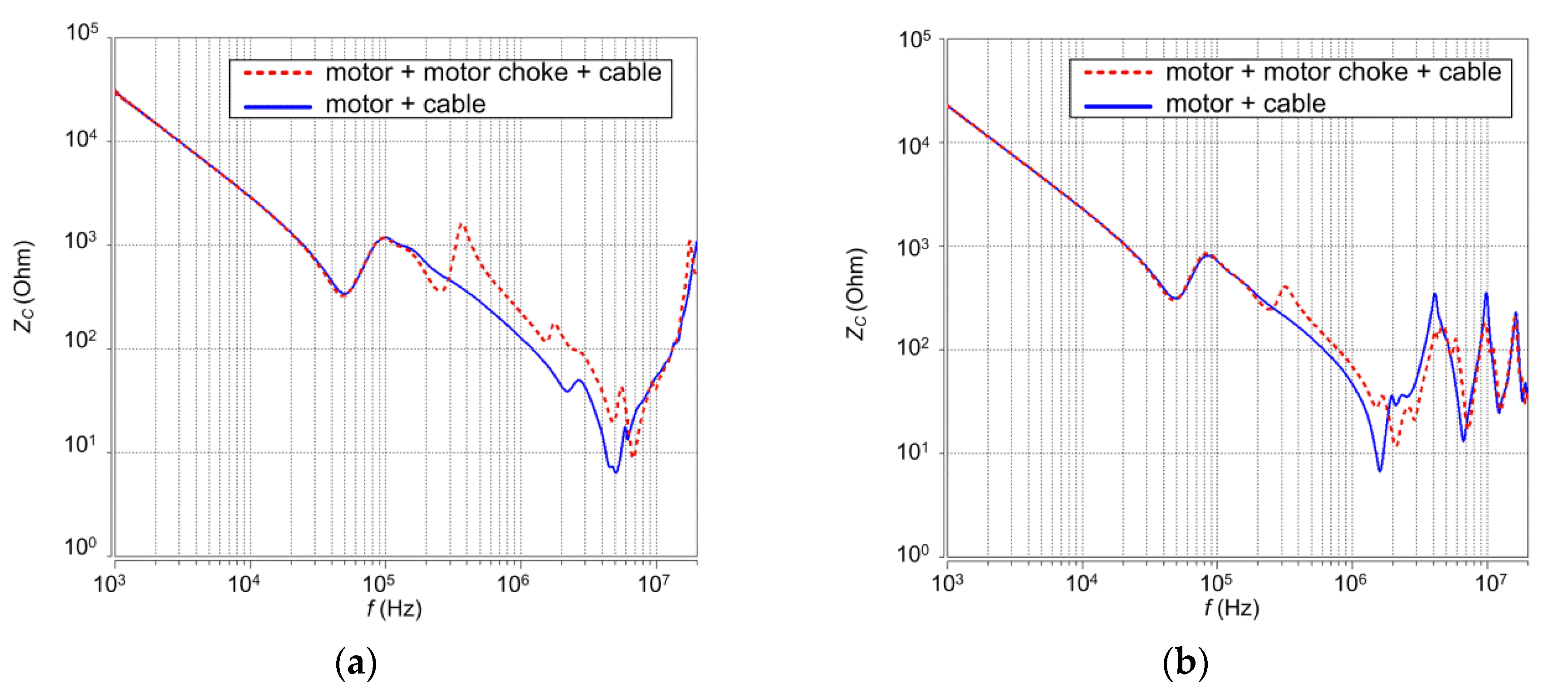
4.1. Common-Mode Impedance Characteristics
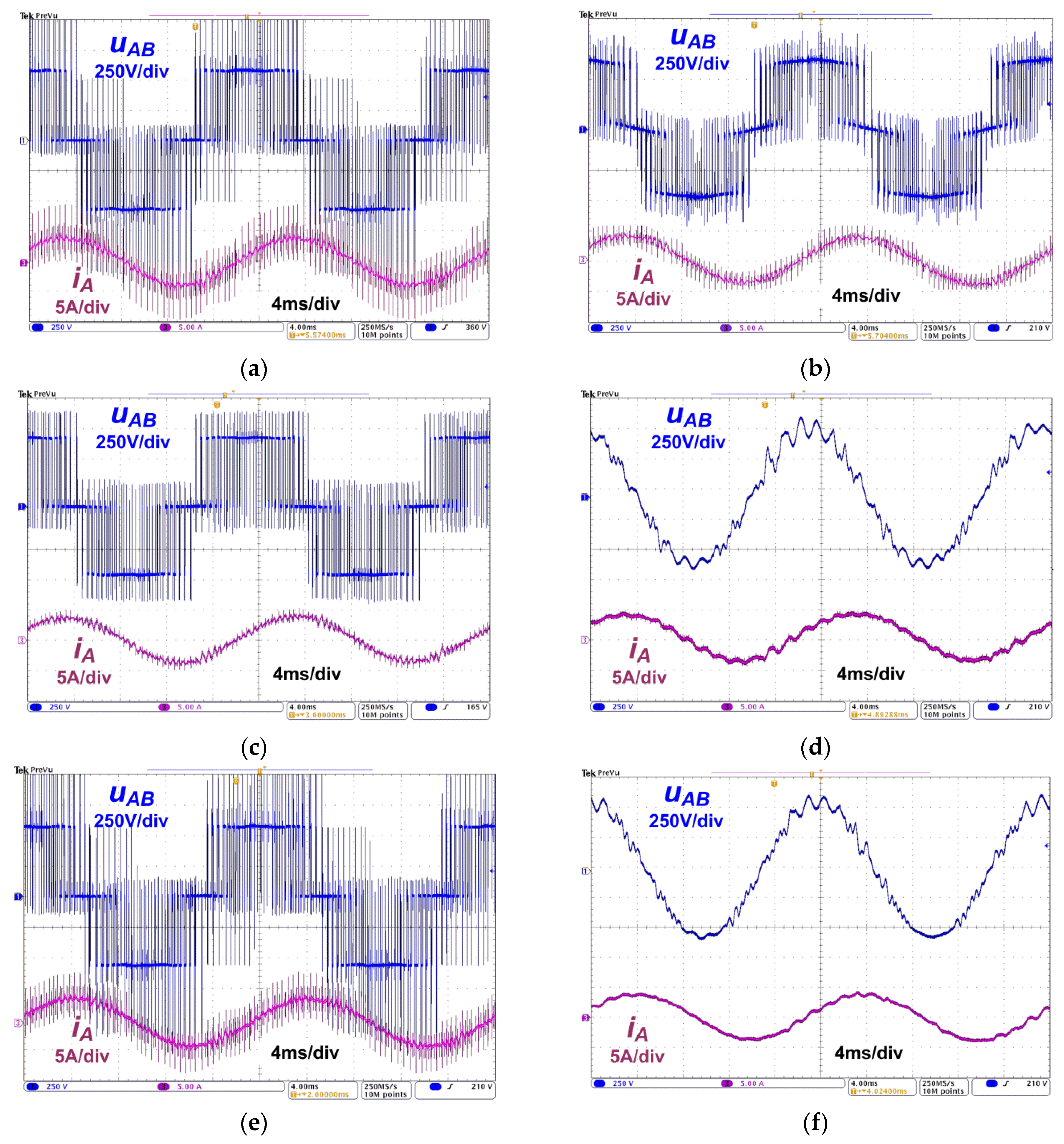
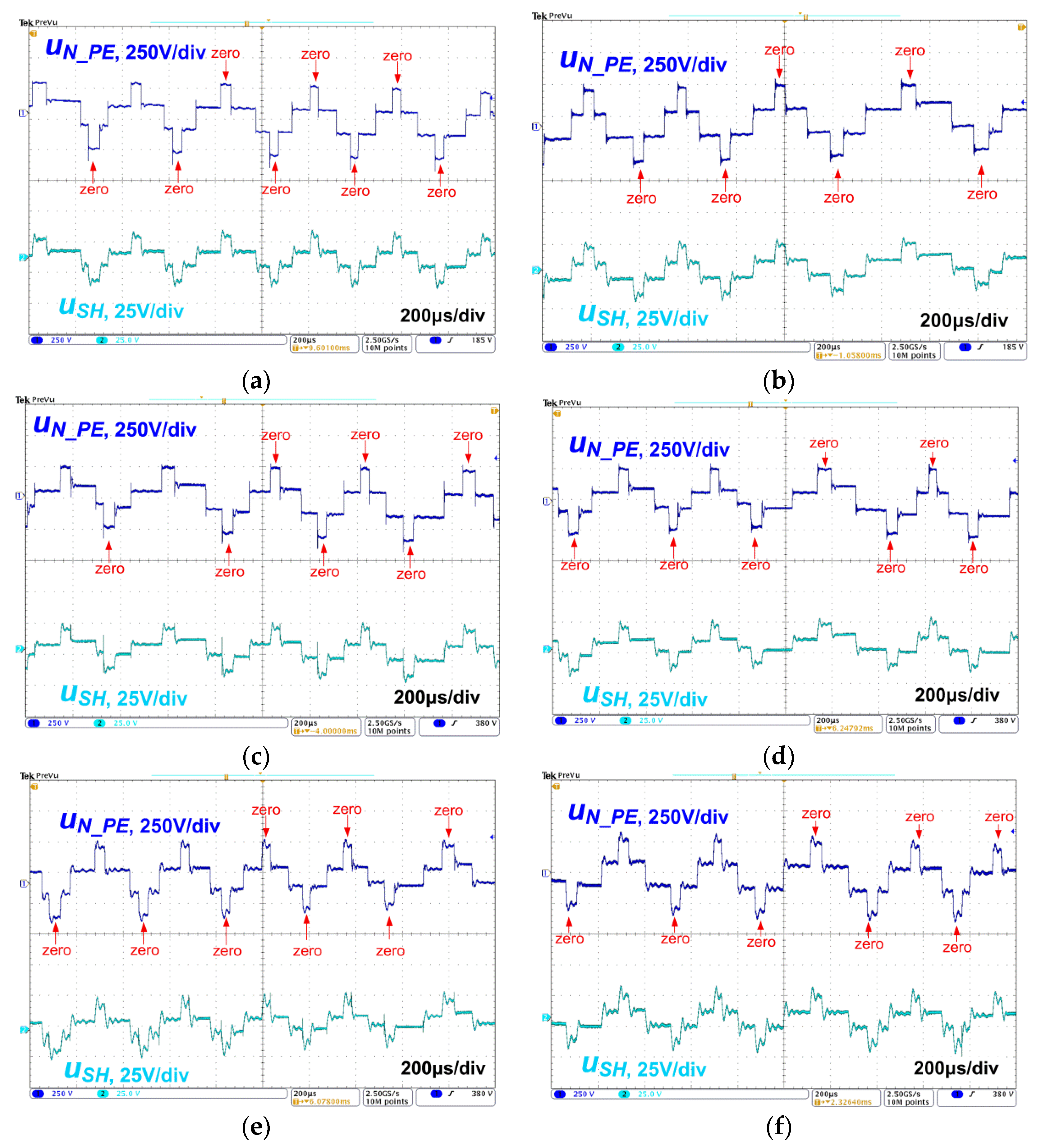
4.2. Voltage and Current Waveforms
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Mohan, N. Electric Machines and Drives: A First Course; Wiley: Hoboken, NJ, USA, 2012. [Google Scholar]
- Koshti, A.K.; Rao, M.N. A brief review on multilevel inverter topologies. In Proceedings of the 2017 International Conference on Data Management, Analytics and Innovation (ICDMAI), Pune, India, 24–26 February 2017; pp. 187–193. [Google Scholar] [CrossRef]
- Han, D.; Morris, C.; Lee, W.; Sarlioglu, B. Determination of CM choke parameters for SiC MOSFET motor drive based on simple measurements and frequency domain modeling. In Proceedings of the 2016 IEEE Applied Power Electronics Conference and Exposition (APEC), Long Beach, CA, USA, 20–24 March 2016; pp. 2861–2867. [Google Scholar] [CrossRef]
- Shirabe, K. Efficiency Comparison between Si-IGBT-Based Drive and GaN-Based Drive. IEEE Trans. Ind. Appl. 2014, 50, 566–572. [Google Scholar] [CrossRef]
- Swamy, M.M.; Kang, J.-K.; Shirabe, K. Power Loss, System Efficiency, and Leakage Current Comparison between Si IGBT VFD and SiC FET VFD With Various Filtering Options. IEEE Trans. Ind. Appl. 2015, 51, 3858–3866. [Google Scholar] [CrossRef]
- Pastura, M.; Nuzzo, S.; Kohler, M.; Barater, D. Dv/Dt Filtering Techniques for Electric Drives: Review and Challenges. In Proceedings of the IECON 2019—45th Annual Conference of the IEEE Industrial Electronics Society, Lisbon, Portugal, 14–17 October 2019; pp. 7088–7093. [Google Scholar] [CrossRef] [Green Version]
- Acharya, B.A.; John, V. Design of output dv/dt filter for motor drives. In Proceedings of the 2010 5th International Conference on Industrial and Information Systems, Mangalore, India, 29 July–1 August 2010; pp. 562–567. [Google Scholar] [CrossRef]
- Guziński, J.; Abu-Rub, H.; Strankowski, P. Variable Speed AC Drives with Inverter Output Filters; John Wiley & Sons: Hoboken, NJ, USA, 2015. [Google Scholar]
- Finlayson, P.T. Output filters for PWM drives with induction motors. IEEE Ind. Appl. Mag. 1998, 4, 46–52. [Google Scholar] [CrossRef]
- Kerkman, R.; Leggate, D.; Skibinski, G. Interaction of drive modulation and cable parameters on AC motor transients. In Proceedings of the IAS ’96 Conference Record of the 1996 IEEE Industry Applications Conference Thirty-First IAS Annual Meeting, San Diego, CA, USA, 6–10 October 1996; Volume 1, pp. 143–152. [Google Scholar] [CrossRef]
- Hwang, D.-H.; Lee, K.-C.; Kim, Y.-J.; Bae, S.-W.; Kim, D.-H.; Ro, C.-G. Voltage stresses on stator windings of induction motors driven by IGBT PWM inverters. In Proceedings of the 38th IAS Annual Meeting on Conference Record of the Industry Applications Conference, 2003, Salt Lake City, UT, USA, 12–16 October 2003; Volume 1, pp. 439–444. [Google Scholar] [CrossRef]
- Fenger, M.; Campbell, S.R.; Pedersen, J. Dealing with motor winding problems caused by inverter drives. In Proceedings of the IEEE-IAS/PCS 2002 Cement Industry Technical Conference. Conference Record (Cat. No.02CH37282), Jacksonville, FL, USA, 5–9 May 2002; pp. 65–76. [Google Scholar] [CrossRef]
- Luszcz, J. High Frequency Conducted Emission in AC Motor Drives Fed by Frequency Converters: Sources and Propagation Paths; IEEE Press: Piscataway, NJ, USA; John Wiley & Sons: Hoboken, NJ, USA, 2018. [Google Scholar]
- Shen, W.; Wang, F.; Boroyevich, D.; Liu, Y. Definition and acquisition of CM and DM EMI noise for general-purpose adjustable speed motor drives. In Proceedings of the 2004 IEEE 35th Annual Power Electronics Specialists Conference (IEEE Cat. No.04CH37551), Aachen, Germany, 20–25 June 2004; pp. 1028–1033. [Google Scholar] [CrossRef]
- Qi, T.; Sun, J. DC bus grounding capacitance optimizatio for common-mode EMI minimization. In Proceedings of the 2011 Twenty-Sixth Annual IEEE Applied Power Electronics Conference and Exposition (APEC), Fort Worth, TX, USA, 6–11 March 2011; pp. 661–666. [Google Scholar] [CrossRef]
- Pairodamonchai, P.; Sangwongwanich, S. Exact common-mode and differential-mode equivalent circuits of inverters in motor drive systems taking into account input rectifiers. In Proceedings of the 2011 IEEE Ninth International Conference on Power Electronics and Drive Systems, Singapore, 5–8 December 2011; pp. 278–285. [Google Scholar] [CrossRef]
- Fan, F.; See, K.Y.; Liu, X.; Li, K.; Gupta, A.K. Systematic Common-Mode Filter Design for Inverter-Driven Motor System Based on In-Circuit Impedance Extraction. IEEE Trans. Electromagn. Compat. 2020, 62, 1711–1722. [Google Scholar] [CrossRef]
- Adabi, J.; Zare, F.; Ledwich, G.; Ghosh, A. Leakage current and common mode voltage issues in modern AC drive systems. In Proceedings of the 2007 Australasian Universities Power Engineering Conference, Perth, Australia, 9–12 December 2007; pp. 1–6. [Google Scholar] [CrossRef] [Green Version]
- Chen, S.; Lipo, T.A.; Novotny, D.W. Circulating type motor bearing current in inverter drives. In Proceedings of the 1996 IEEE Industry Applications Society Annual Meeting (IAS), San Diego, CA, USA, 6–10 October 1996; Volume 1, pp. 162–167. [Google Scholar] [CrossRef]
- Turzynski, M.; Chrzan, P.J. Reducing Common-Mode Voltage and Bearing Currents in Quasi-Resonant DC-Link Inverter. IEEE Trans. Power Electron. 2020, 35, 9553–9562. [Google Scholar] [CrossRef]
- Mechlinski, M.; Schroder, S.; Shen, J.; De Doncker, R.W. Grounding Concept and Common-Mode Filter Design Methodology for Transformerless MV Drives to Prevent Bearing Current Issues. IEEE Trans. Ind. Appl. 2017, 53, 5393–5404. [Google Scholar] [CrossRef]
- Plazenet, T.; Boileau, T.; Caironi, C.; Nahid-Mobarakeh, B. A Comprehensive Study on Shaft Voltages and Bearing Currents in Rotating Machines. IEEE Trans. Ind. Appl. 2018, 54, 3749–3759. [Google Scholar] [CrossRef]
- Muetze, A.; Binder, A. Don’t lose your bearings. IEEE Ind. Appl. Mag. 2006, 12, 22–31. [Google Scholar] [CrossRef]
- Plazenet, T.; Boileau, T.; Caironi, C.; Nahid-Mobarakeh, B. An overview of shaft voltages and bearing currents in rotating machines. In Proceedings of the 2016 IEEE Industry Applications Society Annual Meeting, Portland, OR, USA, 2–6 October 2016; pp. 1–8. [Google Scholar] [CrossRef]
- Busse, D.; Erdman, J.; Kerkman, R.J.; Schlegel, D.; Skibinski, G. Bearing currents and their relationship to PWM drives. IEEE Trans. Power Electron. 1997, 12, 243–252. [Google Scholar] [CrossRef] [Green Version]
- Joshi, A.; Blennow, J. Electrical characterization of bearing lubricants. In Proceedings of the 2014 IEEE Conference on Electrical Insulation and Dielectric Phenomena (CEIDP), Des Moines, IA, USA, 19–22 October 2014; pp. 586–589. [Google Scholar] [CrossRef]
- Akagi, H.; Tamura, S. A Passive EMI Filter for Eliminating Both Bearing Current and Ground Leakage Current From an Inverter-Driven Motor. IEEE Trans. Power Electron. 2006, 21, 1459–1469. [Google Scholar] [CrossRef]
- Chen, S.; Lipo, T.A.; Fitzgerald, D. Source of induction motor bearing currents caused by PWM inverters. IEEE Trans. Energy Convers. 1996, 11, 25–32. [Google Scholar] [CrossRef]
- Bearing Currents in Modern AC Drive Systems. ABB Technical Guide. Available online: https://library.e.abb.com (accessed on 1 June 2021).
- Lai, Y.-S.; Chen, P.-S.; Lee, H.-K.; Chou, J. Optimal Common-Mode Voltage Reduction PWM Technique for Inverter Control With Consideration of the Dead-Time Effects—Part II: Applications to IM Drives With Diode Front End. IEEE Trans. Ind. Appl. 2004, 40, 1613–1620. [Google Scholar] [CrossRef]
- Kimball, J.W.; Zawodniok, M. Reducing Common-Mode Voltage in Three-Phase Sine-Triangle PWM with Interleaved Carriers. IEEE Trans. Power Electron. 2011, 26, 2229–2236. [Google Scholar] [CrossRef]
- Alcaide, A.M.; Yan, H.; Wang, X.; León Galván, J.I.; Portillo Guisado, R.C.; Buticchi, G.; Vazquez, S.; Monopoli, V.G.; Liserre, M.; García Franquelo, L. Common-Mode Voltage Mitigation Technique in Motor Drive Applications by Applying a Sampling-Time Adaptive Multi-Carrier PWM Method. IEEE Access 2021, 9, 56115–56126. [Google Scholar] [CrossRef]
- Park, C.-H.; Seo, I.-K.; Negesse, B.B.; Yoon, J.; Kim, J.-M. A Study on Common Mode Voltage Reduction Strategies According to Modulation Methods in Modular Multilevel Converter. Energies 2021, 14, 1607. [Google Scholar] [CrossRef]
- Ogasawara, S.; Ayano, H.; Akagi, H. An active circuit for cancellation of common-mode voltage generated by a PWM inverter. In Proceedings of the 1997 28th Annual IEEE Power Electronics Specialists Conference (PESC), St. Louis, MO, USA, 22–27 June 1997; Volume 2, pp. 1547–1553. [Google Scholar] [CrossRef] [Green Version]
- Bhakthavachala, A.; Anuradha, K. A Simplified Filter Topology for Compensating Common Mode Voltage and Electromagnetic Interference in Induction Motor Drives. Energy Procedia 2017, 117, 377–384. [Google Scholar] [CrossRef]
- Takahashi, S.; Ogasawara, S.; Takemoto, M.; Orikawa, K.; Tamate, M. Common-Mode Voltage Attenuation of an Active Common-Mode Filter in a Motor Drive System Fed by a PWM Inverter. IEEE Trans. Ind. Appl. 2019, 55, 2721–2730. [Google Scholar] [CrossRef]
- Lin, Z.; Lei, B.; Wu, L.; Mei, P. Eliminating the Effect of Common-Mode Voltage on an Open-End Winding PMSM Based on Model Predictive Torque Control. Math. Probl. Eng. 2021, 2021, 1–11. [Google Scholar] [CrossRef]
- Von Jauanne, A.; Zhang, H. A dual-bridge inverter approach to eliminating common-mode voltages and bearing and leakage currents. IEEE Trans. Power Electron. 1999, 14, 43–48. [Google Scholar] [CrossRef]
- Baranwal, R.; Basu, K.; Mohan, N. Carrier-Based Implementation of SVPWM for Dual Two-Level VSI and Dual Matrix Converter With Zero Common-Mode Voltage. IEEE Trans. Power Electron. 2015, 30, 1471–1487. [Google Scholar] [CrossRef]
- Divan, D.M. The resonant DC link converter-a new concept in static power conversion. IEEE Trans. Ind. Appl. 1989, 25, 317–325. [Google Scholar] [CrossRef]
- Turzyński, M.; Chrzan, P.J. Resonant DC link inverters for AC motor drive systems–critical evaluation. Bull. Pol. Acad. Sci. Tech. Sci. 2019, 67, 241–252. [Google Scholar] [CrossRef]
- Li, R.; Xu, D. A Zero-Voltage Switching Three-Phase Inverter. IEEE Trans. Power Electron. 2014, 29, 1200–1210. [Google Scholar] [CrossRef]
- Kedarisetti, J.; Mutschler, P. A Motor-Friendly Quasi-Resonant DC-Link Inverter with Lossless Variable Zero-Voltage Duration. IEEE Trans. Power Electron. 2012, 27, 2613–2622. [Google Scholar] [CrossRef]
- Turzyński, M.; Frivaldsky, M. Modeling of a Quasi-Resonant DC Link Inverter Dedicated to Common-Mode Voltage and Ground Current Reduction. Energies 2020, 13, 5090. [Google Scholar] [CrossRef]
- Sojka, P.; Pipiska, M.; Frivaldsky, M. GaN power transistor switching performance in hard-switching and soft-switching modes. In Proceedings of the 2019 20th International Scientific Conference on Electric Power Engineering (EPE), Kouty nad Desnou, Czech Republic, 15–17 May 2019; pp. 1–5. [Google Scholar] [CrossRef]
- Huang, J.; Shi, H. A Hybrid Filter for the Suppression of Common-Mode Voltage and Differential-Mode Harmonics in Three-Phase Inverters with CPPM. IEEE Trans. Ind. Electron. 2015, 62, 3991–4000. [Google Scholar] [CrossRef]
- Baek, S.; Choi, D.; Bu, H.; Cho, Y. Analysis and Design of a Sine Wave Filter for GaN-Based Low-Voltage Variable Frequency Drives. Electronics 2020, 9, 345. [Google Scholar] [CrossRef] [Green Version]
- Luu, T.; Shudarek, T. An integrated inverter output passive sinewave filter for eliminating both common and differential mode PWM motor drive problems. In Proceedings of the 2017 IEEE Applied Power Electronics Conference and Exposition (APEC), Tampa, FL, USA, 26–30 March 2017; pp. 373–379. [Google Scholar] [CrossRef]
- Muller, J.-K.; Manthey, T.; Han, D.; Sarlioglu, B.; Friebe, J.; Mertens, A. Output Sine-Wave Filter Design and Characterization for a 10 kW SiC Inverter. In Proceedings of the 2019 IEEE Energy Conversion Congress and Exposition (ECCE), Baltimore, MD, USA, 29 September–3 October 2019; pp. 359–366. [Google Scholar] [CrossRef]
- Guzinski, J.; Abu-Rub, H. Sensorless induction motor drive with voltage inverter and sine-wave filter. In Proceedings of the 2013 IEEE International Symposium on Sensorless Control for Electrical Drives and Predictive Control of Electrical Drives and Power Electronics (SLED/PRECEDE), München, Germany, 17–19 October 2013; pp. 1–8. [Google Scholar] [CrossRef]
- Chysky, J.; Novak, J.; Novak, M. Losses in sinusoidal filter chokes. In Proceedings of the IECON 2013—39th Annual Conference of the IEEE Industrial Electronics Society, Vienna, Austria, 10–13 November 2013; pp. 7790–7794. [Google Scholar] [CrossRef]
- Habetler, T.G.; Naik, R.; Nondahl, T.A. Design and implementation of an inverter output LC filter used for dv/dt reduction. IEEE Trans. Power Electron. 2002, 17, 327–331. [Google Scholar] [CrossRef]
- Palma, L.; Enjeti, P. An inverter output filter to mitigate dV/dt effects in PWM drive system. In Proceedings of the APEC. Seventeenth Annual IEEE Applied Power Electronics Conference and Exposition (Cat. No.02CH37335), Dallas, TX, USA, 10–14 March 2002; pp. 550–556. [Google Scholar] [CrossRef]
- Heldwein, M.L.; Dalessandro, L.; Kolar, J.W. The Three-Phase Common-Mode Inductor: Modeling and Design Issues. IEEE Trans. Ind. Electron. 2011, 58, 3264–3274. [Google Scholar] [CrossRef]
- Muetze, A.; Sullivan, C.R. Simplified Design of Common-Mode Chokes for Reduction of Motor Ground Currents in Inverter Drives. IEEE Trans. Ind. Appl. 2011, 47, 2570–2577. [Google Scholar] [CrossRef]






























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Bearing Current Type | EDM Currents | Circulating Currents | Rotor Ground Currents | |
|---|---|---|---|---|
| Solution | ||||
| shielded cables | no influence | possible increase at higher rotor shaft speed | partial reduction | |
| grounding of one end of rotor shaft via brush | complete reduction | effective, if an opposite bearing is made as hybrid bearing or insulated one | possible increase if a non-insulated clutch is applied between motor and load | |
| insulated bearings | partial reduction | partial reduction | partial reduction | |
| hybrid bearings | complete reduction | complete reduction | complete reduction | |
| Configuration | |duA_PE/dt| (kv/μs) | UAB(max)/UDC (–) | IPE(max) (A) | ISH(max) (mA) | |uN_PE/UDC| (–) | |||||
|---|---|---|---|---|---|---|---|---|---|---|
| cable length: | 1 m | 10 m | 1 m | 10 m | 1 m | 10 m | 1 m | 10 m | 1 m | 10 m |
| inverter | 7.08 | 5.57 | 1.45 | 2.05 | 3.75 | 3.37 | 158 | 146 | 1/2 | 1/2 |
| inverter + motor choke (LD = 3.8 mH) | 2.62 | 2.42 | 1.44 | 1.47 | 2.23 | 2.08 | 132 | 60 | 1/2 | 1/2 |
| inverter + du/dt choke (LDT = 0.31 mH) | 1.27 | 1.04 | 1.43 | 1.46 | 1.45 | 1.73 | 70 | 86 | 1/2 | 1/2 |
| inverter + sine-wave filter (LS = 3.8 mH, CS = 15 µF) | 1.57 | 1.33 | 1.12 | 1.16 | 1.91 | 1.73 | 105 | 95 | 1/2 | 1/2 |
| inverter + CM choke (LC = 0.72 mH) | 1.09 | 1.28 | 2.10 | 2.16 | 0.28 | 0.825 | 112 | 98 | 1/2 | 1/2 |
| inverter + sine-wave filter + CM choke (LS = 0.31 mH, CS = 15 µF, LC = 0.72 mH) | 0.12 | 0.09 | 1.12 | 1.13 | 0.25 | 0.43 | 80 | 40 | 1/2 | 1/2 |
| Technique | CM Voltage Levels | Ground Leakage Current Suppression | Usage Requirements | Advantages | Disadvantages |
|---|---|---|---|---|---|
| Modification of modulation strategy [8,30,31,32] | ±UDC/6 [32] | reported 50% [32] | required modification of inverter modulation strategy and control algorithms |
|
|
| Active common noise canceller [34,35,36] | reported reduction in uN_PE voltage levels more than 90% regardless of the inverter transistors’ state [36] | reported up to 90% [34] | implemented between motor and inverter, access to both DC link buses between rectifier and inverter is required |
|
|
| Dual two-level inverter [37,38,39] | ±UDC/3 [39] | reported up to 50% [38] | required use of dual inverter and motor with open stator windings |
|
|
| PQRDCLI with two insulating switches [20,43] | ±UDC/6 [20] | reported up to 80% [20] | required modifications of inverter DC link circuit, control systems and control algorithms |
|
|
| motor choke | ±UDC/2 | moderate reduction (about 40%) | applied between motor and inverter, no additional modifications of inverter topology or control algorithms are needed |
|
|
| du/dt choke | ±UDC/2 | moderate reduction (about 50%) | applied between motor and inverter, no additional modifications of inverter topology or control algorithms are needed |
|
|
| sine-wave filter | ±UDC/2 | moderate reduction (about 50%) | applied between motor and inverter, no additional modifications of inverter topology are needed |
|
|
| CM choke | ±UDC/2 | high reduction (about 80%) | applied between motor and inverter, no additional modifications of inverter topology or control algorithms are needed |
|
|
| CM choke + sine-wave filter | ±UDC/2 | highest reduction (about 90%) | applied between motor and inverter, no additional modifications of inverter topology are needed |
| combines disadvantages of sine-wave filters and CM chokes |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Turzyński, M.; Musznicki, P. A Review of Reduction Methods of Impact of Common-Mode Voltage on Electric Drives. Energies 2021, 14, 4003. https://doi.org/10.3390/en14134003
Turzyński M, Musznicki P. A Review of Reduction Methods of Impact of Common-Mode Voltage on Electric Drives. Energies. 2021; 14(13):4003. https://doi.org/10.3390/en14134003
Chicago/Turabian StyleTurzyński, Marek, and Piotr Musznicki. 2021. "A Review of Reduction Methods of Impact of Common-Mode Voltage on Electric Drives" Energies 14, no. 13: 4003. https://doi.org/10.3390/en14134003
APA StyleTurzyński, M., & Musznicki, P. (2021). A Review of Reduction Methods of Impact of Common-Mode Voltage on Electric Drives. Energies, 14(13), 4003. https://doi.org/10.3390/en14134003