1. Introduction
The ongoing shift from centralized power generation by large conventional power plants to a variety of small-scale renewable distributed energy resources (DERs) is seriously changing the electric power system. Power grids are designed for a unidirectional, top-down power flow from power plants to consumers. However, in the future, more and more
prosumers do not only consume electricity but also generate electricity with their own DERs, which is going to result in a more bidirectional power flow. Additionally, the coupling of the sectors electricity, heating, cooling, and mobility leads to new challenges in low-voltage distribution grids. As a result, bottlenecks, overloads, and voltage range deviations can occur more and more often [
1].
Without digitization, such a complex and highly volatile system would not be controllable anymore [
1]. In Germany, in 2016, the
German Act on the Digitization of the Energy Transition (“Gesetz zur Digitalisierung der Energiewende”) was passed. Based on the technical infrastructure of intelligent metering systems, it introduced regulations for a digital communication system in order to enable a highly secure communication between the participants of the energy sector, such as intelligent buildings or distribution system operators (DSOs) [
2].
One option to meet the aforementioned challenges is to utilize the energy flexibility of DERs. Modern buildings are more and more often equipped with energy generation and storage capacities, electric vehicles (EVs), and intelligent appliances. Building energy management systems (BEMSs), usually employed to optimize local energy flows for increasing the self-consumption of locally generated energy or for decreasing energy costs, can be utilized to exploit the internal energy flexibility of buildings in order to provide grid stabilization measures, i.e., ancillary services (ASs) [
3].
The term
microgrids is often used in the literature to describe low-voltage grids that can use load management to ensure grid stability and to increase power quality [
4]. Katiraei et al. describe several control strategies for microgrids with a focus on energy management and market participation and detail the differences between microgrids and large energy systems [
5]. Basu et al. provide a literature survey on regulation, technical, economic, and ecological benefits, technical and tariff designs as well as energy market participation possibilities specific to microgrids [
6]. Another review compiled by Meng et al. explores the functionalities, benefits, and drawbacks of microgrid management strategies that differ with respect to their degree of decentralization [
7]. Mahmoud et al. survey microgrid control strategies that can adapt control parameters at runtime using methods such as fuzzy logic, particle swarm optimization, or reinforcement learning [
8]. A special emphasis on managing volatile generation and uncertainty, cost-effectiveness, and communication in microgrids is given in a literature review by Zia et al. [
9].
Different approaches to supporting local distribution grids, i.e., the provision of ASs by DERs, have been proposed. Most approaches employ centralized or hierarchical strategies with central coordination units that monitor the grid and either directly control DERs or communicate commands and target values to local controllers. Shi et al. developed an online energy management system (EMS) that utilizes Lyapunov optimization to regularly solve a stochastic optimal power flow problem for a microgrid comprised of diverse DERs [
10]. A hierarchical regional EMS that uses variable energy tariffs to coordinate ASs for distribution grids provided by independently managed smart buildings was implemented and evaluated by Kochanneck [
11].
Some decentralized approaches, such as the one utilized by Feng et al., who evaluated an EMS for a microgrid employing the alternating direction method of multipliers as a distributed optimization algorithm [
12], handle critical grid situations in a direct manner. Silani et al. [
13] presented a distributed EMS that solves an optimal power flow problem for a microgrid by determining cost-optimized schedules using the local controllers of DERs and optimizing the total cost function with a central controller based on the communicated schedules. To cope with the difficulty of obtaining data from all locations in large microgrids, Hosseinzadeh et al. [
14] presented a distributed power flow management system that works with only one or two sensors per subgrid that serve as indicators for the local controllers of DERs to adjust their operation. Other approaches operate in a decentralized way as well but employ more indirect, market-based mechanisms. An example is the peer-to-peer market design developed by Zhang et al., which facilitates direct energy trade between DER operators and energy consumers while observing grid restrictions by including variable grid usage costs into the transaction costs of every trade [
15].
Another approach to coordinate multiple DERs with energy cost-optimizing EMSs using variable electricity tariffs with group pricing was presented by Gottwalt [
16]. In his conclusions, he highlighted the importance of observing possible grid restrictions in future work. A review of coordination techniques for multiple smart homes in the context of demand side management [
17] and a day-ahead EMS for energy cost minimization and renewable energy sharing among neighboring smart homes [
18] was provided by Celik et al.
Peng et al. implemented and evaluated [
19] and Saldana et al. reviewed [
20] systems for the provision of ASs by electric vehicles (EVs) while also considering the necessary communication effort.
Regardless of whether centralized or decentralized coordination of DERs for AS provision is proposed, the mentioned approaches almost always assume that the involved systems can communicate whenever control decisions have to be made. The resilience of a system used for the provision of ASs against communication failures, or the possibility of supporting distribution grids in a completely decentralized way, without communication, is almost never considered. If communication infrastructure is considered, the literature mostly either focuses on specific types of DER or does not take grid restrictions into account when trying to achieve a balance between energy supply and demand among multiple DERs. Another aspect that is rarely implemented is a comparison between the performance of centralized and decentralized approaches.
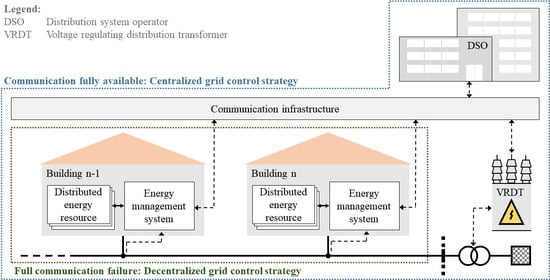
In this article, we present a multi-agent system (MAS) consisting of the BEMSs of smart buildings comprising multiple DERs, such as photovoltaics (PV)-systems, EVs, battery energy storage systems (BESSs), heat pumps (HPs), combined heat and power plants (CHPP), and intelligent appliances, a central grid controller, operated by the DSO, and the local controller of a distribution transformer. The utilized transformer can either be non-controllable or a voltage regulation distribution transformer (VRDT). The presented MAS is able to coordinate the provision of ASs for the local distribution grid in a centralized way, coordinated by the DSO, as well as in a completely decentralized way, where each building makes independent control decisions based solely on locally measurable grid status data. The MAS, as well as the different control strategies, provide the foundation for a fully adaptive grid control system, which we plan to implement and evaluate in the future, that is not only able to provide resilience against electricity outages but also against communication failures, by appropriate switching of strategies. The decentralized strategy, developed to be employed during communication failures, could also be used exclusively, for example, in regions where suitable communication infrastructure is not available in the first place. Additionally, the evaluation of the MAS can provide valuable insights into the needed communication effort to achieve the maximum possible increase in resilience against critical grid situations that smart buildings with DERs can provide. With the presented MAS, we aim to answer the following research questions, which are based on the ones we posed in [
21]:
How far can the resilience of distribution grids be increased by utilizing the energy flexibility of buildings?
To what extent is communication needed for the exploitation of this flexibility? What are the advantages and disadvantages of the centralized and decentralized approaches for increasing the distribution grid’s resilience? How does the centralized approach perform compared to the decentralized approach?
An overview of the contributions we provide in this article is given in
Table 1.
This paper is structured as follows.
Section 1 introduces the topic and states related work on the field with a focus on microgrid management as well as AS provision by and coordination of DERs.
Section 2 presents the concepts and system architecture for the centralized and decentralized control of the DERs of smart buildings aimed at increasing the resilience of low-voltage grids. The proposed concepts are evaluated and discussed in
Section 3. Finally, a conclusion is given in
Section 4.
3. Results and Discussion
To evaluate and compare the methods proposed in the previous section, simulation studies are performed using the OSH’s multi-building simulation and load-flow study capabilities. To adequately measure the performance of the different grid control strategies, a scenario is needed where critical situations inevitably occur. To ensure this, a scenario with a conventionally designed grid but highly modern and generously equipped buildings in the summer, when PV generation is the highest, is chosen for the evaluation. We assume that if the proposed control strategies show a good performance in an extreme scenario such as the one chosen, they most likely perform well in less extreme scenarios as well. All simulated buildings possess intelligent appliances, a PV system, a BESS, an EV, and either an HP or a CHPP. While the building simulation runs with a temporal resolution of one second, the resolution of the power-flow studies is chosen as one minute since the most highly fluctuating simulation component is the utilized PV profile, which was measured with a one-minute resolution. As a result, the grid control algorithms work with a one-minute resolution as well. The configurations of the grid, the buildings, the evolutionary algorithm, and the temporal resolutions for the different components of the simulation are given in
Table 4.
A schematic of the simulated low-voltage grid used for the power-flow studies is given in
Figure 3. The topology of this particular grid was first developed in [
26] and revised in [
11]. For the evaluation in this article, to ensure the occurrence of voltage range deviations, we increased the average distance between the grid connection points of the considered grid from the original value of 34 m in [
11] to 84 m. While 34 m is an average value for the average distance between grid connection points in villages, 84 m represents a top end value for this average distance according to the distribution given in [
48]. Additionally, we applied an MVA base value of 0.4 to the transformer impedance instead of the value 0.63, which was given in the grid specification in [
11]. We assume this to be more realistic for a 400 kVA transformer since, according to [
50], the permissible efficiency of a transformer, which is determined by its impedance, decreases with decreasing nominal power.
To gain a meaningful assessment of the abilities of the different grid control strategies utilized depending on the availability of communication infrastructure, we simulate the entire first week of July five times for each control strategy using five different random seeds per building and differing random seeds among the buildings. The random seeds are used for the appliance, domestic hot water, and EV usage, as well as the initialization of the evolutionary algorithm. 30 June and 8 July are simulated as well, but the results for these days are discarded. This extension of the simulated time span ensures realistic initial states of charge (SoCs) for the BESSs and EVs as well as initial temperatures for the hot water storage tanks at the beginning of the week and prevents unrealistic building behavior caused by the rolling horizon optimizations the buildings utilize at the end of the week.
The simulation studies are performed on a compute cluster. Each simulation run is performed on six Intel Xeon Gold 6230 cores with activated hyperthreading, clocked at 2.1 GHz and 12 GB of Memory. Using this hardware configuration, one simulation run takes between 6.1 and 12.5 h, depending on the considered control strategy and the randomized building behavior. The data generated by the simulations is publicly available at KITopen [
51].
To visualize the effects of and the significant differences between the control strategies, the progressions of the maximum local voltage in the grid, the transformer winding hot-spot temperature, and the maximum local line current in the grid are plotted for 1 July. To make the progressions for the different control strategies comparable, the results shown in the following figures are based on the same random seed configuration for every strategy. To simplify the presentation, voltages and line currents are normalized to their respective nominal values. The respective maximum sustainable values are indicated by red dotted lines. The maximum sustained value of 120 °C for the winding hot-spot temperature of the transformer is taken from [
31] and the admissible voltage range of ±10% from [
28]. As a point of reference, the progressions that result from using no flexibility-based grid control strategy are plotted as well.
The progressions for the different control strategies, if only reactive power control and no active power targets are used to influence critical situations, are shown in
Figure 6.
The reactive power control is able to prevent all voltage range deviations in the considered time period, regardless of whether centralized or decentralized control is utilized. Since the centralized approach also includes nodes with critical voltages within a certain distance from a building in the control algorithm, it is able to more reliably stay below the upper criticality boundary of 1.07 pu than the decentralized approach. However, at least in this case, this does not inhibit the decentralized strategy from preventing all voltage deviations from the admissible range that would otherwise occur. If a VRDT is used, all voltages stay within the admissible range as well. Here, it does not matter if the VRDT is used with or without centralized reactive power control since the cascade of measures defined in
Section 2.4.2 favors VRDT usage over reactive power control. As a consequence, the corresponding voltage progressions, as well as the other progressions, are almost identical.
The transformer temperature and maximum line current progressions show that the prevention of voltage range deviations comes at a price. Both the centralized and decentralized control strategies produce significantly more frequent and pronounced congestions due to the additional transmitted reactive power. Here, the decentralized strategy is at an advantage as the buildings do not consider critical voltages in their neighborhood and thus feed-in or draw less reactive power as they would in the centralized strategy.
Changing the VRDT’s transmission ratio to enable lower voltages entails higher currents and consequent losses on its windings and all grid lines, as the same power has to be transmitted. Hence, the transformer temperature and the line current are elevated when using a VRDT as well. While the increase in line current is more moderate, the increase in transformer temperature ranges between the centralized and decentralized strategies. For the lifetime of the transformer, the decentralized reactive power control strategy might consequently be slightly advantageous compared to using a VRDT.
Figure 7 shows the progressions that result from using only active power targets and no reactive power control.
In this configuration, the centralized and the decentralized control strategies perform very similarly on this particular simulated day. However, as the aggregated results, shown later in this section, indicate, this is an exception rather than the rule. This becomes apparent when taking the average SoCs of the buildings’ BESSs into consideration. Different initial BESS SoCs at the beginning of a particular day can arise from different random seeds and utilized control strategies that influence the charging behavior in the prior days. For the progressions shown in
Figure 7, the average initial SoC of the buildings’ BESSs for the decentralized strategy is 37%, while it is 29% for the centralized strategy without a VRDT and 16% if a VRDT is used. As a consequence, in this particular case, the centralized strategy has more available active power flexibility it can utilize to improve critical situations, which coincidentally approximately compensates for a different effect that, by contrast, benefits the decentralized strategy. This effect stems from the different indicators used to trigger counter measures against congestions (see
Section 2.4.2 and
Section 2.4.4). Since, in the decentralized strategy, a building starts to implement an active power target already at relatively low deviations from the nominal voltage, power targets are generally implemented earlier. This gives the buildings time to fully discharge already partially charged BESSs and prevents fully discharged BESSs from charging too early before the grid status becomes critical. The lower SoC can then be used to decrease the highest PV feed-in powers later in the day more substantially and for longer time periods, as the BESSs can charge with higher power and for longer durations. This indicates potential for improving the centralized strategy but also shows the viability of the decentralized strategy as well as the usefulness of the local voltage as an indicator for all considered types of critical situations. For other days and random seeds, preconditions, such as the initial SoCs, could be significantly different, which potentially enables the decentralized strategy to perform better than the centralized one. This underlines the importance of using multiple random seeds and days to comprehensively evaluate the performance of the proposed strategies.
Voltage range deviations can not be fully prevented by using only active power targets. However, they can be reduced in their average magnitude for the progressions shown and could potentially also reduce their frequency for lower overall loads. Here, the additional usage of reactive power would be helpful to prevent the remaining deviations. If the centralized strategy also includes a VRDT, all deviations are prevented.
In this configuration, the control strategies that use the buildings’ flexibility show very strong performance in reducing the transformer temperature and the maximum line current, especially compared to the scenarios where a VRDT is used for voltage regulation. The reductions are so substantial that almost all congestions are prevented. This shows the potential of exploiting the flexibility modern buildings can provide when it comes to increasing the resilience of low-voltage grids without resorting to grid expansion or forcible load curtailment.
Finally, the progressions resulting from a combination of reactive and active power adjustment are shown in
Figure 8.
Here, the centralized strategy performs better when it comes to reducing voltages but not in a meaningful way since the decentralized strategy still manages to keep even the highest voltages inside the admissible range for the considered time period.
Both strategies are able to substantially reduce the transformer temperature compared to the scenarios without a control strategy that uses building flexibility, especially for the one where a VRDT is used for voltage regulation. The substantial improvement also compared to the temperature progressions for the purely reactive power-based voltage control in
Figure 6 stems not only from the lower load generated by active power. It also emerges from the reduced need for utilizing reactive power resulting from the lower voltages that this smaller active load induces.
As a result of the lower amount of reactive power transmitted when using the decentralized control strategy, the decentralized strategy should technically outperform the centralized strategy when it comes to reducing the transformer temperature. This is the case in
Figure 6, where only reactive power control is used. However, when both control options are used, the decentralized strategy performs worse on this particular day. The reason for this behavior is the same as for the behavior previously observed in
Figure 7. In this case, the described effect is even stronger, as the average initial SoC of the buildings’ BESSs for the decentralized strategy is 36%, while it is 18% for the centralized strategy without a VRDT and 21% if a VRDT is used.
Despite the aforementioned obstacles, the decentralized approach still outperforms the centralized strategy in reducing line currents as long as no VRDT is used. However, the use of a VRDT almost eliminates the additional transmission of reactive power via grid lines and thus keeps line currents substantially lower than the decentralized strategy and the centralized strategy without a VRDT.
To give a performance overview of all tested control strategies,
Table 5 summarizes the deviations from all admissible grid status ranges considered in this article for the entire simulated week. The displayed values are the averages of the five different random seed configurations. The
outage times, which are given in percentages, are calculated by dividing the number of all simulation time steps where a particular admissible range is violated at one or more locations in the grid by the total number of simulated time steps. The name “outage time” is chosen because all of these violations can entail electricity outages. The relative increases or reductions in outage time compared to the scenario where no grid control strategy is used are given in the
relative change columns.
Table 5 shows that compromises have to be made when deciding on control options. The only option that reliably reduces all types of outage is the exclusive usage of active power targets. The (additional) usage of a VRDT or reactive power control can substantially decrease and almost eliminate voltage-based outages but also increases congestions. Hence, these voltage regulation measures should only be used in combination with active power targets, as long as transformers and grid lines are not dimensioned for significantly higher maximum load than the grid equipment in the considered simulated low-voltage grid.
A remarkable observation, already indicated in the interpretation of the previous figures, can be made when comparing the performances of the centralized and the decentralized strategy. As long as no VRDT is used, the decentralized strategy performs better or at least comparably to the centralized one, regardless of whether reactive power control, active power targets, or both are used, despite the lacking availability of comprehensive grid status data. As in
Figure 6, this can partially be explained by the lower magnitudes of reactive power transferred when using the decentralized strategy due to the non-involvement of critical voltages in a building’s vicinity in its decision-making process. However, this does not explain the outperformance even when only active power targets are used. As mentioned earlier, this is an effect of the different congestion management used in the decentralized strategy, which enables preventive charging or discharging of BESSs to increase the flexibility for possible critical situations later on. This means that the performance of the centralized strategy could be improved by making it work more similarly to the decentralized one, for example, by decreasing the distance in which the voltages of neighboring nodes are included in the determination of reactive power targets. Another way could be to decrease the transformer temperature and line utilization at which counter measures are triggered even further.
In the tested scenario, the major advantage of being able to use the centralized grid control strategy is the possibility of using a VRDT, which reduces voltage range deviations almost as effectively on average as reactive power-based voltage regulation but entails substantially fewer additional grid line congestions.
4. Conclusions
In this article, we developed methods to improve the resilience of low-voltage grids by exploiting the internal energy flexibility of modern buildings with BEMSs. We presented strategies that utilize centralized as well as completely decentralized grid control in an MAS comprising the BEMSs of modern buildings, a central grid controller utilized by the DSO and the local controller of a distribution transformer, which can also be a VRDT. These strategies and the MAS form the basis for an anticipated adaptive grid control system that we plan to implement in the future. This system uses different grid control strategies depending on the availability of suitable communication infrastructure, thus providing resilience not only against electricity outages but also against communication failures. It will be able to use the centralized strategy for comprehensive observation and control by considering all relevant grid status data, as long as functioning communication infrastructure is available, as well as provide resilience against communication failures by appropriately switching to the decentralized strategy. The decentralized grid control strategy could also be used exclusively in scenarios where reliable communication infrastructure is generally unavailable.
To answer the research questions posed in
Section 1, the developed strategies were evaluated in a simulated scenario designed to represent the most extreme load conditions that might occur in low-voltage grids in the future. The strategies can substantially reduce voltage range deviations, transformer temperatures, and line congestions, even during communication failures, i.e., if the decentralized strategy is used, and thereby comprehensively increase the resilience of the grid in the evaluation scenario. However, there is a trade off between the reduction of congestions and the strict adherence to the admissible voltage range. The use of reactive power or a VRDT to regulate voltages more effectively compared to utilizing only active power flexibility entails higher currents on grid lines and transformers. As a consequence, we propose using these measures only in conjunction with active power flexibility or in grids that exclusively exhibit problematic voltages.
Remarkably, the decentralized control strategy, utilized if reliable communication is unavailable, shows very competitive performance to the centralized one, even surpassing it substantially in reducing outage times triggered by congestions as long as a VRDT is not available. This can be explained by its reliance on more preemptive grid control measures. Consequently, the lower performance of the centralized strategy can potentially be improved by adjusting it to work more similarly to the decentralized one. Another advantage of the decentralized strategy is the mentioned possibility of using it exclusively to increase grid resilience even in the general absence of dedicated communication infrastructure. If used exclusively, it also provides higher degrees of privacy and autonomy for electricity customers. However, a major advantage of the centralized strategy is the possibility of using a VRDT since comprehensive grid status data is available to decide on control commands for the VRDT, which is not the case for the decentralized strategy. The usage of a VRDT can improve voltages substantially while causing fewer and less pronounced congestions than reactive power control. Consequently, the answer to the question of how much communication is needed to exploit the available flexibility depends on whether a VRDT is available or not and by how much the centralized control strategy can be improved in the future.
The observations made while evaluating the developed control strategies imply various starting points for future research. A further adjustment of the various parameters used in the strategies, especially for the centralized one, would most likely improve the performance further. In this context, it would be useful to perform parameter studies to find optimal settings. Furthermore, a consensus-based control strategy for situations where the central controller fails, but communication among buildings and the transformer is still possible, could be implemented. Here, the buildings could incorporate the data measured by other buildings and the transformer into their decision making and the local controller of a VRDT could decide on control actions based on the data communicated by the buildings. Methods that allow the buildings and the transformer to automatically detect communication failures and autonomously switch between centralized, consensus-based, and decentralized strategies have to be implemented to obtain the anticipated fully adaptive grid control system. We also plan to implement methods that allow forcible load curtailment that could be used when the exploitation of flexibility is not sufficient to resolve a critical situation. The control strategies could also be evaluated for different load scenarios, such as the winter and intermediate months or highly synchronized EV charging. In addition, it would be advantageous to quantify the amount of additional energy that can be transmitted with low-voltage grids, at least for specific scenarios, by using the flexibility of smart buildings. Such results could be useful when deciding on grid dimensioning or implementing grid extensions.














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}