
Parking Pose Generation for Autonomous Freight Collection by Pallet Handling Car-like Robot

 ,
,  ,
,  , and
, and 
Abstract
:1. Introduction
2. Problem and Approach
2.1. Freight Detection
2.2. Orientation of Vehicle
2.3. Defining Parking Spot Reference to Freight
3. Software and Control Architecture
4. Mathematical Modeling and Notation
4.1. Vehicle Kinematic Model
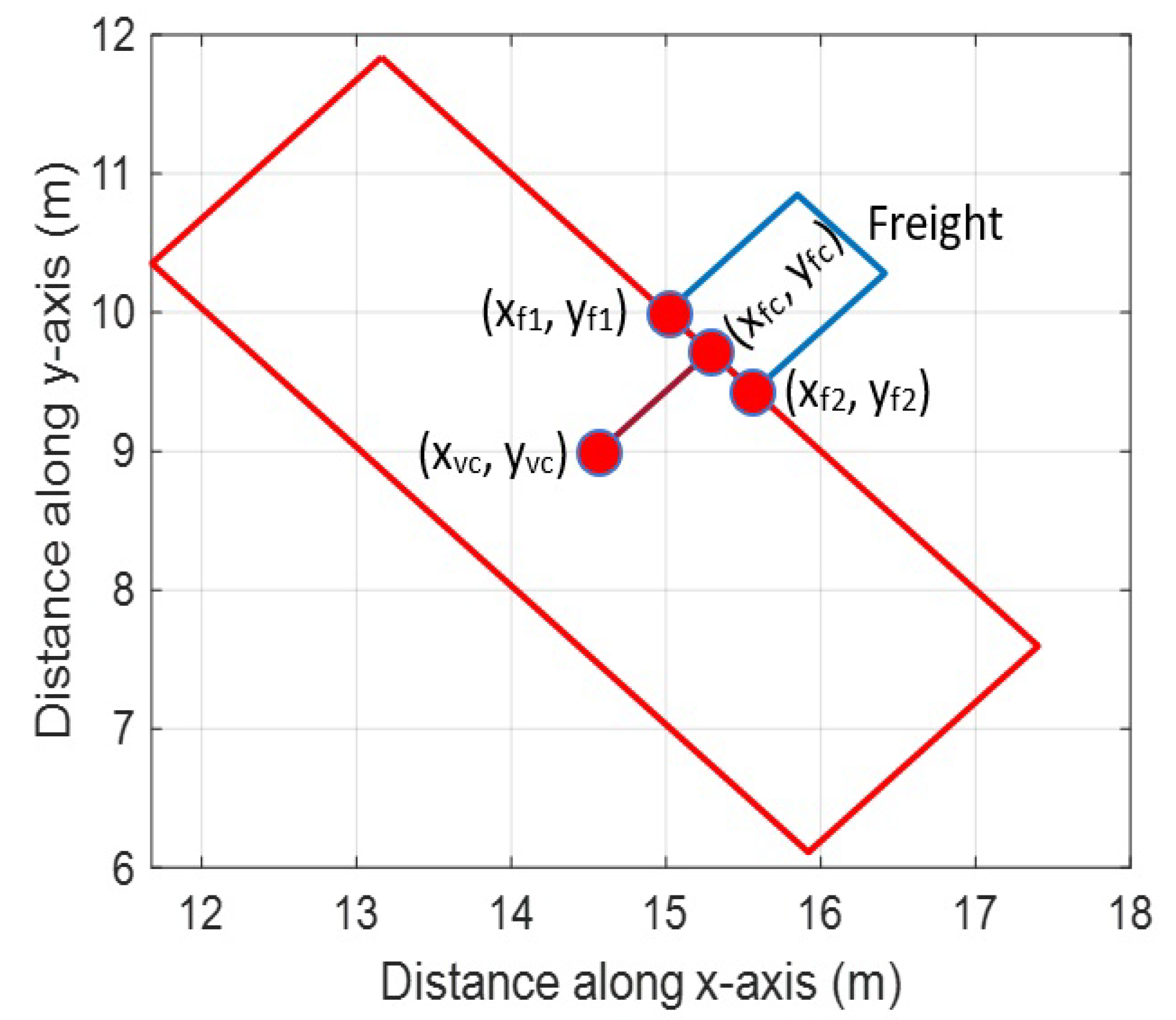
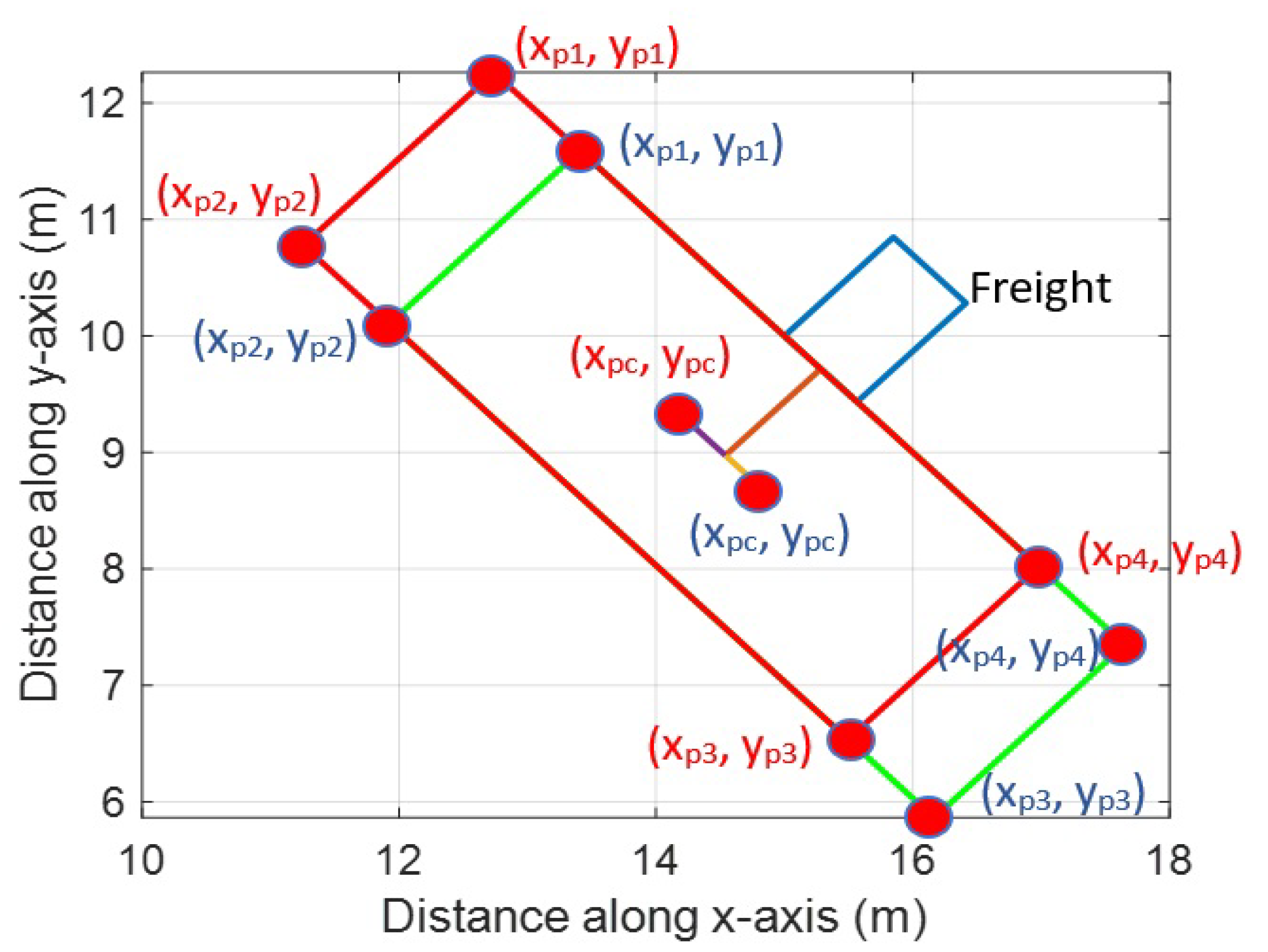
4.2. Points Acquisition for Parking Spot
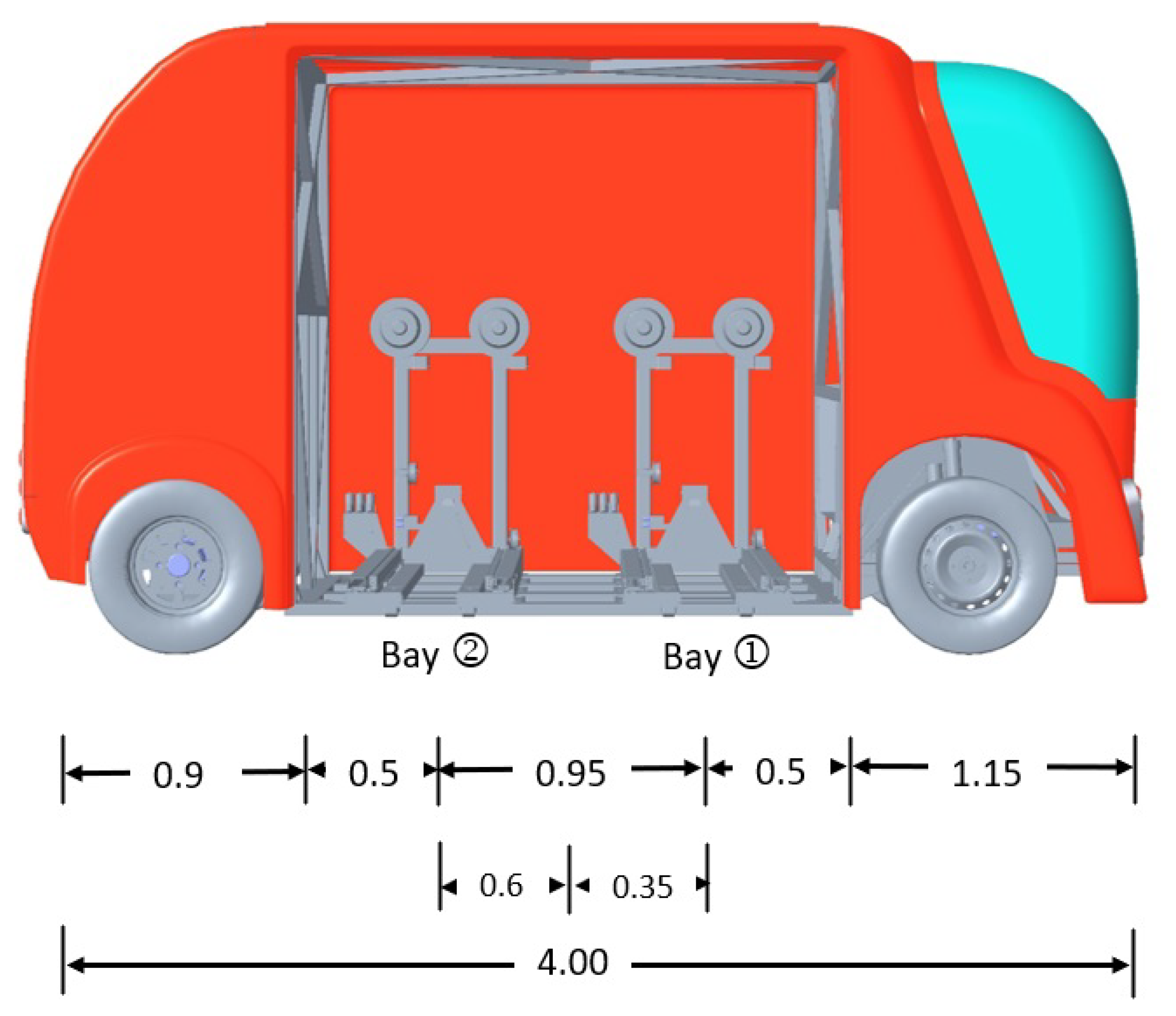
4.3. Parking Area with Respect to Loading Bays
5. Results
5.1. Parking Spot Definitions w.r.t Loading Bays
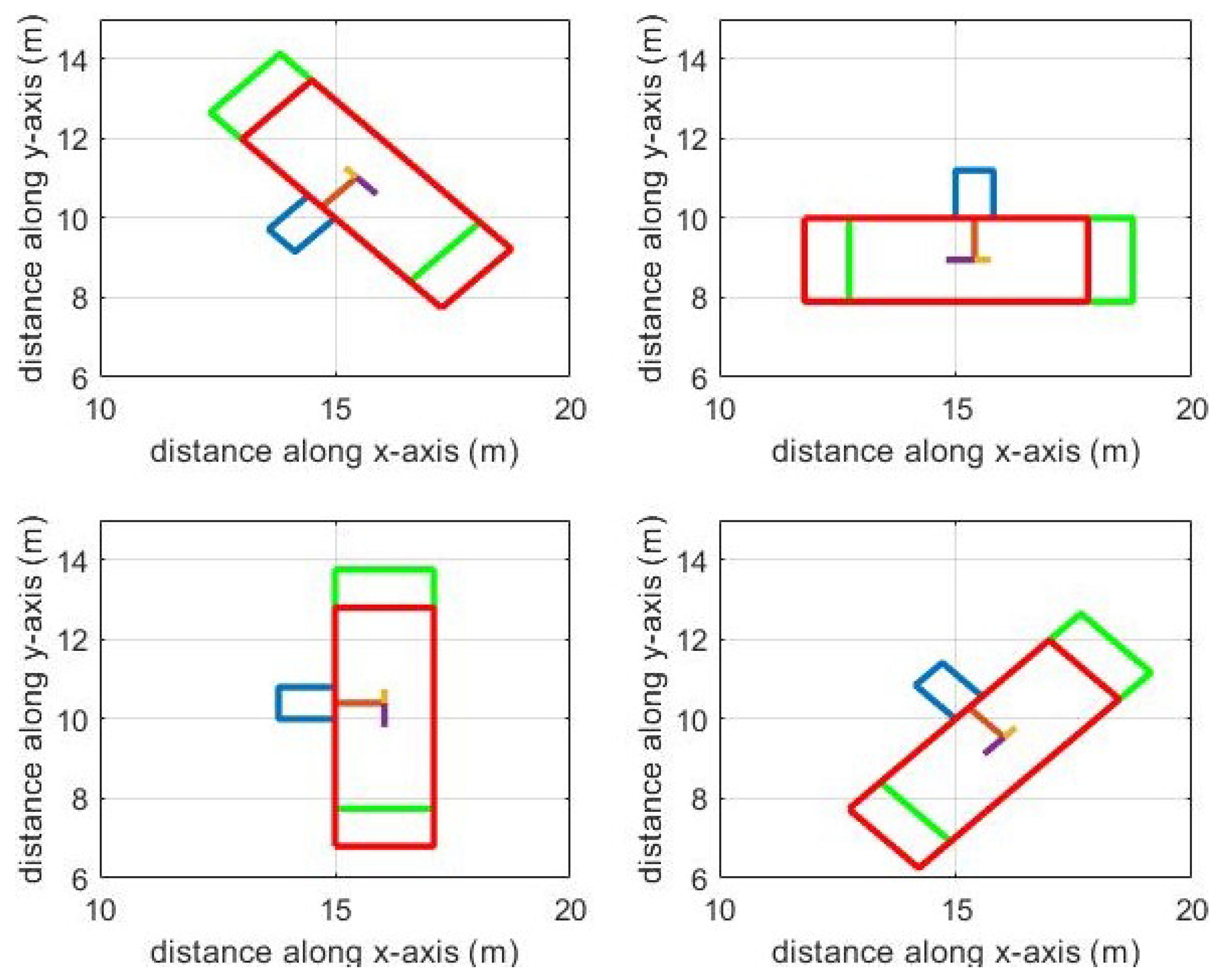
5.2. Results for Different Freight Placement
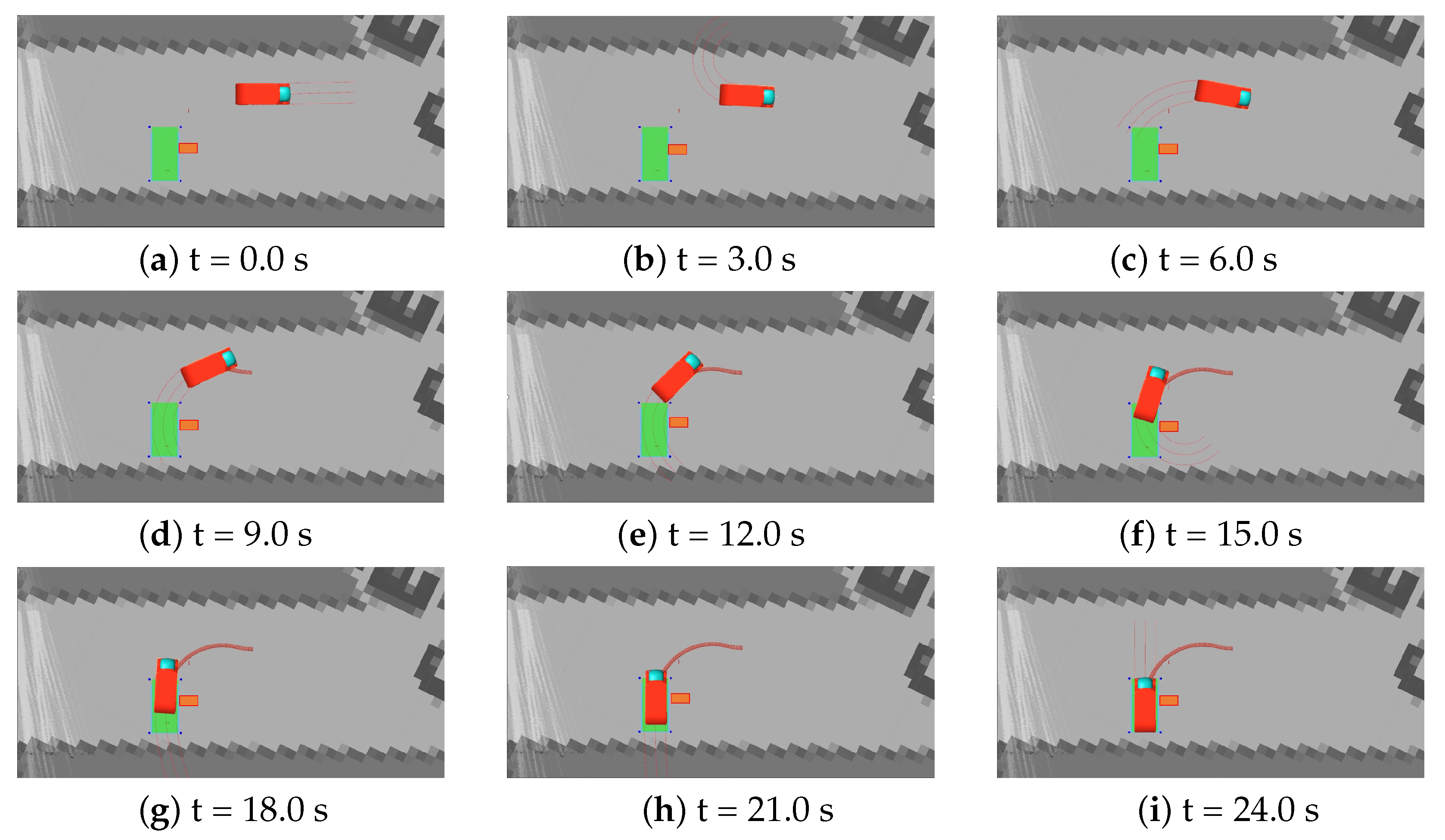
5.3. Vehicle Parking in ROS Environment
6. Conclusions and Perspectives
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| FURBOT | Freight Urban Robotic Vehicle |
| SHOW | SHared automation Operating models for Worldwide adoption |
References
- Freight Urban RoBOTic Vehicle. 8 August 2016. Available online: https://cordis.europa.eu/project/id/285055 (accessed on 19 March 2021).
- FURBOT, EGVI. 9 January 2018. Available online: https://egvi.eu/research-project/furbot/ (accessed on 19 March 2021).
- Masood, K.; Zoppi, M.; Molfino, R. Mathematical Modelling for Performance Evaluation Using Velocity Control for Semi-autonomous Vehicle. In Proceedings of the 15th International Conference on Soft Computing Models in Industrial and Environmental Applications (SOCO 2020), Burgos, Spain, 16–18 September 2020; Herrero, Á., Cambra, C., Urda, D., Sedano, J., Quintián, H., Corchado, E., Eds.; Advances in Intelligent Systems and Computing. Springer: Cham, Switzerland, 2021; Volume 1268. [Google Scholar] [CrossRef]
- Masood, K.; Molfino, R.; Zoppi, M. Simulated Sensor Based Strategies for Obstacle Avoidance Using Velocity Profiling for Autonomous Vehicle FURBOT. Electronics 2020, 9, 883. [Google Scholar] [CrossRef]
- Masood, K.; Dauptain, X.; Zoppi, M.; Molfino, R. Hydraulic Pressure-Flow Rate Control of a Pallet Handling Robot for an Autonomous Freight Delivery Vehicle. Electronics 2020, 9, 1370. [Google Scholar] [CrossRef]
- Masood, K.; Zoppi, M.; Fremont, V.; Molfino, R.M. From Drive-By-Wire to Autonomous Vehicle: Urban Freight Vehicle Perspectives. Sustainability 2021, 13, 1169. [Google Scholar] [CrossRef]
- Clarembaux, L.G.; Pérez, J.; Gonzalez, D.; Nashashibi, F. Perception and Control Strategies for Autonomous Docking for Electric Freight Vehicles. Transp. Res. Procedia 2016, 14, 1516–1522. [Google Scholar] [CrossRef]
- Morales, D.P.; Kermorgant, O.; Quijada, S.D.; Martinet, P. Laser-Based Control Law for Autonomous Parallel and Perpendicular Parking. In Proceedings of the 2018 Second IEEE International Conference on Robotic Computing (IRC), Laguna Hills, CA, USA, 31 January–2 February 2018. [Google Scholar]
- Pérez-Morales, D.; Kermorgant, O.; Domínguez-Quijada, S.; Martinet, P. Autonomous Perpendicular And Parallel Parking Using Multi-Sensor Based Control. In Proceedings of the 9th Workshop on Planning, Perception and Navigation for Intelligent Vehicles at IEEE/RSJ International Conference on Intelligent Robots and Systems, Vancouver, CO, Canada, 24–28 September 2017. [Google Scholar]
- Golbabaei, F.; Yigitcanlar, T.; Bunker, J. The role of shared autonomous vehicle systems in delivering smart urban mobility: A systematic review of the literature. Int. J. Sustain. Transp. 2020, 1–18. [Google Scholar] [CrossRef]
- Amiri, A.M.; Ferguson, M.R.; Razavi, S. Adoption patterns of autonomous technologies in Logistics: Evidence for Niagara Region. Transp. Lett. 2021, 1–12. [Google Scholar] [CrossRef]
- Willems, L. Understanding the Impacts of Autonomous Vehicles in Logistics. Digit. Transform. Logist. 2021, 113–127. [Google Scholar] [CrossRef]
- Reed, S.; Campbell, A.M.; Thomas, B.W. The Value of Autonomous Vehicles for Last-Mile Deliveries in Urban Environments. Manag. Sci. 2021. [Google Scholar] [CrossRef]
- Schlenther, T.; Martins-Turner, K.; Bischoff, J.F.; Nagel, K. Potential of Private Autonomous Vehicles for Parcel Delivery. Transp. Res. Rec. J. Transp. Res. Board 2020, 2674, 520–531. [Google Scholar] [CrossRef]
- Pollaris, H.; Braekers, K.; Caris, A.; Janssens, G.K.; Limbourg, S. Vehicle routing problems with loading constraints: State-of-the-art and future directions. OR Spectr. 2014, 37, 297–330. [Google Scholar] [CrossRef]
- Ostermeier, M.; Henke, T.; Hübner, A.; Wäscher, G. Multi-compartment vehicle routing problems: State-of-the-art, modeling framework and future directions. Eur. J. Oper. Res. 2021, 292, 799–817. [Google Scholar] [CrossRef]
- Bortfeldt, A.; Homberger, J. Packing first, routing second—A heuristic for the vehicle routing and loading problem. Comput. Oper. Res. 2013, 40, 873–885. [Google Scholar] [CrossRef]
- Research, H.A. Self-Parking Cars: Quick Guide, Car and Driver. 30 November 2020. Available online: https://www.caranddriver.com/research/a31995350/self-parking-cars-quick-guide/ (accessed on 20 March 2021).
- Kang, D.H.; Kang, C.M.; Kim, J.-S.; Kim, S.; Kim, W.-Y.; Lee, S.-H.; Chung, C.C. Vision-based autonomous indoor valet parking system. In Proceedings of the 2017 17th International Conference on Control, Automation and Systems (ICCAS), Jeju, Korea, 18–21 October 2017. [Google Scholar]
- Shen, X.; Zhang, X.; Borrelli, F. Autonomous Parking of Vehicle Fleet in Tight Environments. In Proceedings of the 2020 American Control Conference (ACC), Denver, CO, USA, 1–3 July 2020. [Google Scholar]
- Zhang, X.; Liniger, A.; Sakai, A.; Borrelli, F. Autonomous Parking Using Optimization-Based Collision Avoidance. In Proceedings of the 2018 IEEE Conference on Decision and Control (CDC), Miami, FL, USA, 17–19 December 2018. [Google Scholar]
- Lee, B.; Wei, Y.; Guo, I.Y. Automatic parking of self-driving car based on Lidar. In Proceedings of the ISPRS-International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, Wuhan, China, 18–22 September 2017; Volume XLII-2/W7, pp. 241–246. [Google Scholar]
- Kusumakar, R. Autonomous Parking for Articulated Vehicles. Master’s Thesis, HAN University of Applied Science, Arnhem, The Netherlands, 2017. [Google Scholar]
- Jung, H.G.; Kim, D.S.; Yoon, P.J.; Kim, J. Parking Slot Markings Recognition for Automatic Parking Assist System. In Proceedings of the 2006 IEEE Intelligent Vehicles Symposium, Meguro-Ku, Japan, 13–15 June 2006. [Google Scholar]
- Li, S.; Hai, Y. Estimating camera pose from H-pattern of parking lot. In Proceedings of the 2010 IEEE International Conference on Robotics and Automation, Anchorage, Alaska, 3–8 May 2010. [Google Scholar]
- Du, X.; Tan, K.K. Autonomous Reverse Parking System Based on Robust Path Generation and Improved Sliding Mode Control. IEEE Trans. Intell. Transp. Syst. 2015, 16, 1225–1237. [Google Scholar] [CrossRef]
- Vorobieva, H.; Glaser, S.; Minoiu-Enache, N.; Mammar, S. Automatic parallel parking with geometric continuous-curvature path planning. In Proceedings of the 2014 IEEE Intelligent Vehicles Symposium Proceedings, Dearborn, MI, USA, 8–11 June 2014. [Google Scholar]
- Cepolina, E.M.; Farina, A. An optimization methodology for the consolidation of urban freight boxes. In Proceedings of the 15th International Conference on Harbor, Maritime and Multimodal Logistics Modeling and Simulation, Athens, Greece, 23–25 September 2013; pp. 46–52. [Google Scholar]
- Muscolo, G.G.; Leonardo, L.M.; Pietronave, G.; Zoppi, M.; Molfino, R. Industrial solutions for loading/unloading goods on a full electrical freight urban robotic vehicle. Int. J. Veh. Syst. Model. Test. 2015, 10, 366. [Google Scholar] [CrossRef]
- Vorobieva, H.; Glaser, S.; Minoiu-Enache, N.; Mammar, S. Automatic parallel parking in tiny spots: Path planning and control. IEEE Trans. Intell. Transp. Syst. 2015, 16, 396–410. [Google Scholar] [CrossRef] [Green Version]
- Pérez-Morales, D.; Kermorgant, O.; Domínguez-Quijada, S.; Martinet, P. Multi-Sensor-Based Predictive Control for Autonomous Parking in Presence of Pedestrians. In Proceedings of the ICARCV 2020 16th International Conference on Control, Automation, Robotics and Vision, Shenzhen, China, 13–15 December 2020. [Google Scholar]
- Morari, M.; Zafiriou, E. Robust Process Control; Prentice Hall: Englewood Cliffs, NJ, USA, 1989. [Google Scholar]
- Johnson, S.G. The NLopt Nonlinear-Optimization Package. Available online: http://ab-initio.mit.edu/nlopt (accessed on 1 July 2021).
- Kraft, D. A Software Package for Sequential Quadratic Programming; Wiss. Berichtswesen d. DFVLR: Koeln, Germany, 1988; Volume 88. [Google Scholar]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Vehicle Dimensions (m) | Length | Width | Height |
| 4 | 1.5 | 2 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Masood, K.; Morales, D.P.; Fremont, V.; Zoppi, M.; Molfino, R. Parking Pose Generation for Autonomous Freight Collection by Pallet Handling Car-like Robot. Energies 2021, 14, 4677. https://doi.org/10.3390/en14154677
Masood K, Morales DP, Fremont V, Zoppi M, Molfino R. Parking Pose Generation for Autonomous Freight Collection by Pallet Handling Car-like Robot. Energies. 2021; 14(15):4677. https://doi.org/10.3390/en14154677
Chicago/Turabian StyleMasood, Khayyam, David Pérez Morales, Vincent Fremont, Matteo Zoppi, and Rezia Molfino. 2021. "Parking Pose Generation for Autonomous Freight Collection by Pallet Handling Car-like Robot" Energies 14, no. 15: 4677. https://doi.org/10.3390/en14154677
APA StyleMasood, K., Morales, D. P., Fremont, V., Zoppi, M., & Molfino, R. (2021). Parking Pose Generation for Autonomous Freight Collection by Pallet Handling Car-like Robot. Energies, 14(15), 4677. https://doi.org/10.3390/en14154677