Author Contributions
Conceptualization, J.L. (Jungyoul Lim); Data curation, B.A.N.; Formal analysis, R.Y.; Investigation, K.L.; Methodology, J.L. (Jinho Lee); Resource, K.L.; Supervision, W.Y.; Validation, C.L.; Writing—original draft, R.Y.; Writing—review & editing, W.Y. All authors have read and agreed to the published version of the manuscript.
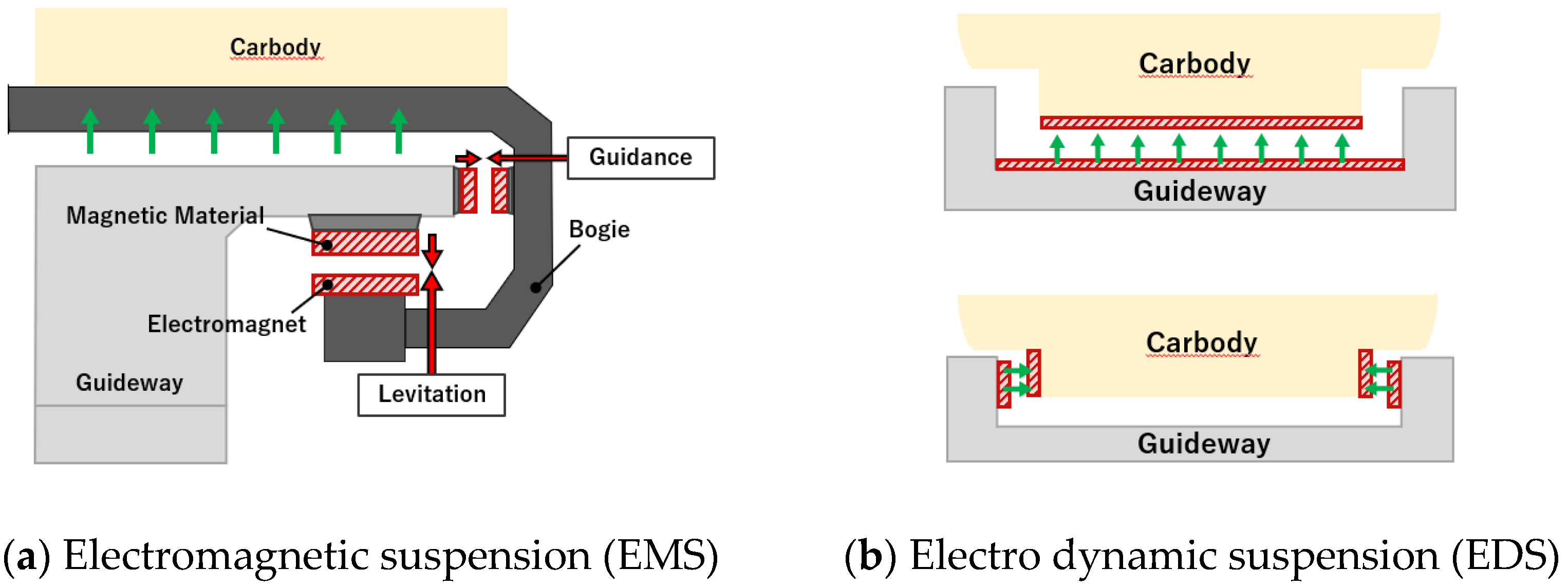
Figure 1.
Principle of electromagnetic suspension and electro dynamic suspension.
Figure 1.
Principle of electromagnetic suspension and electro dynamic suspension.
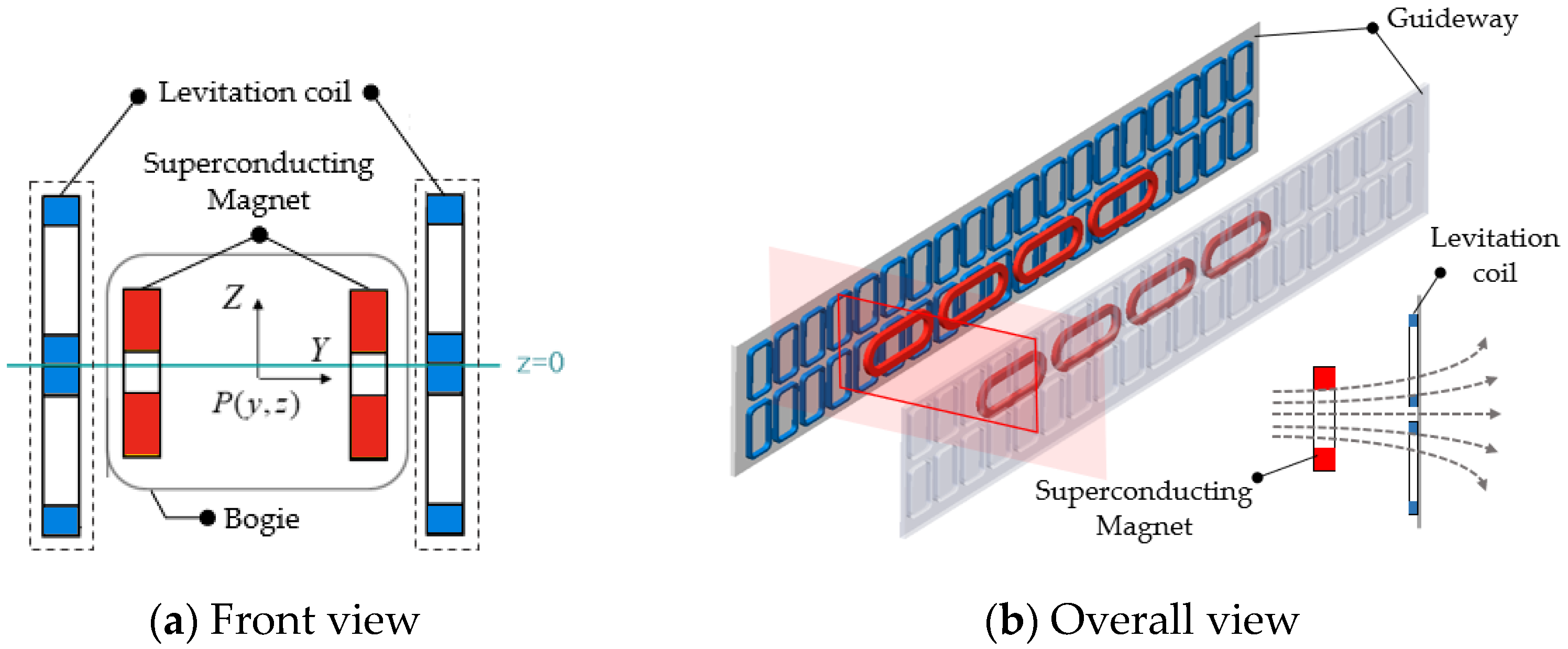
Figure 2.
Arrangement of superconducting magnets and levitation coil.
Figure 2.
Arrangement of superconducting magnets and levitation coil.
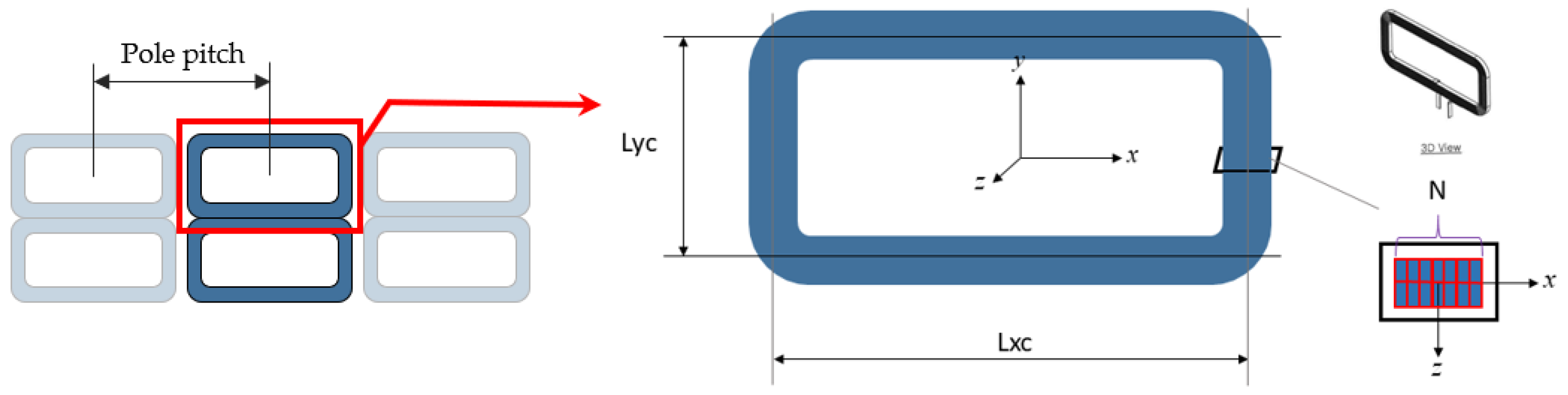
Figure 3.
Design of levitation coil.
Figure 3.
Design of levitation coil.
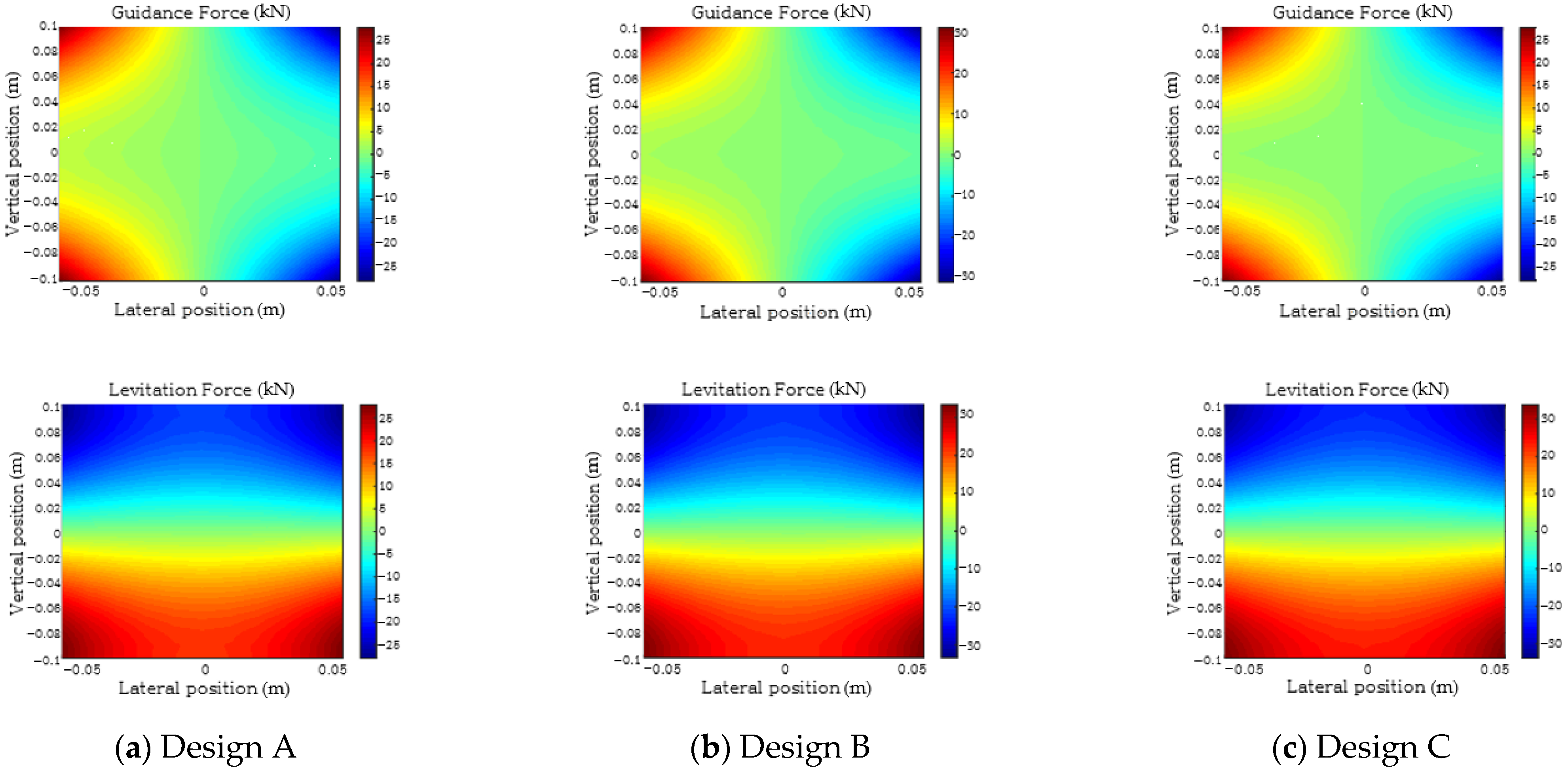
Figure 4.
Distributions of the guidance and levitation forces.
Figure 4.
Distributions of the guidance and levitation forces.
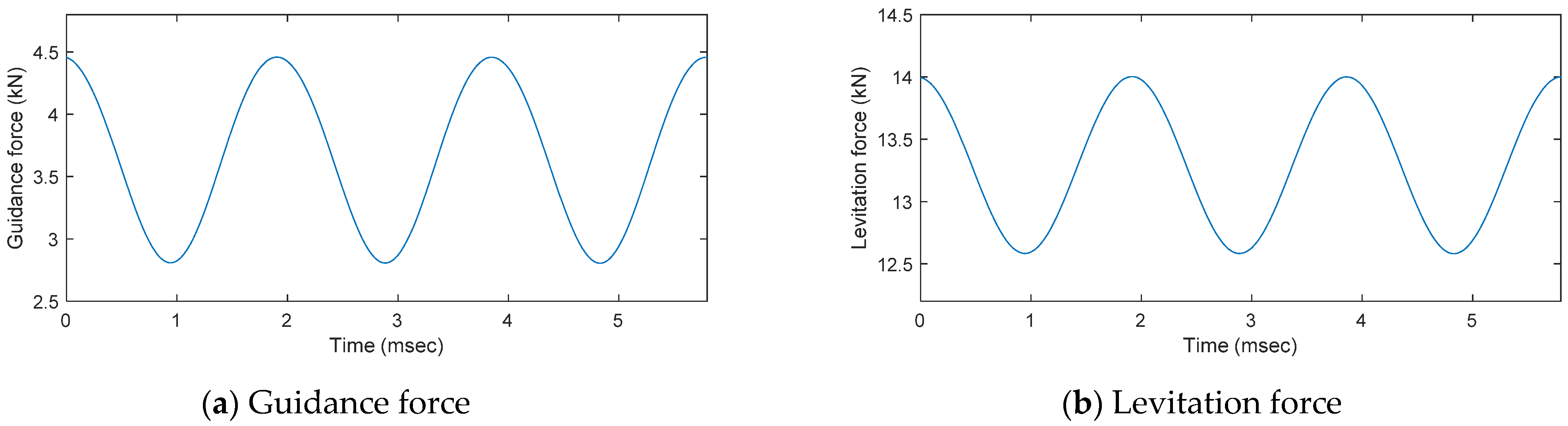
Figure 5.
Levitation/guidance force in the time domain (Design A).
Figure 5.
Levitation/guidance force in the time domain (Design A).
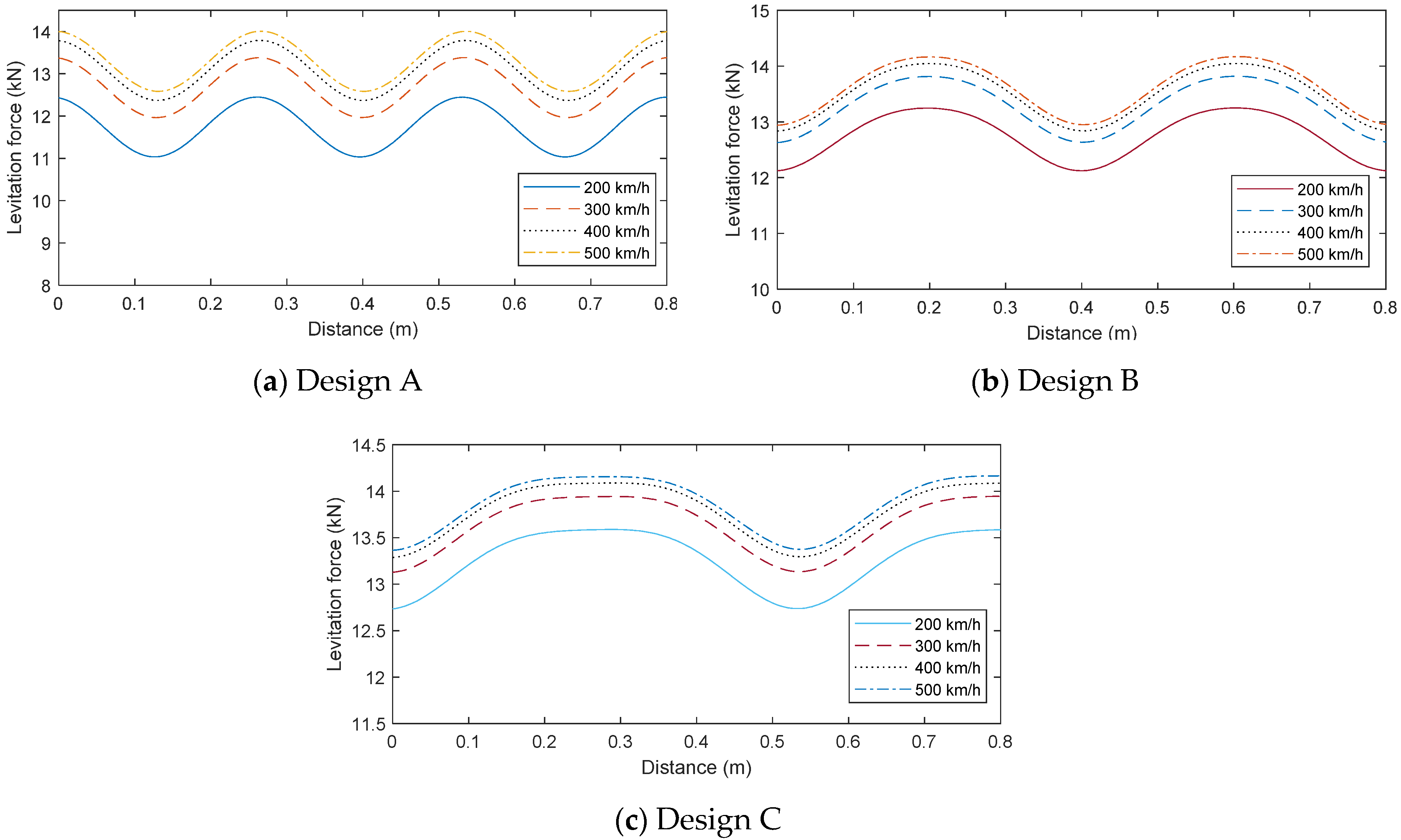
Figure 6.
Variation in the levitation force with respect to vehicle speed.
Figure 6.
Variation in the levitation force with respect to vehicle speed.
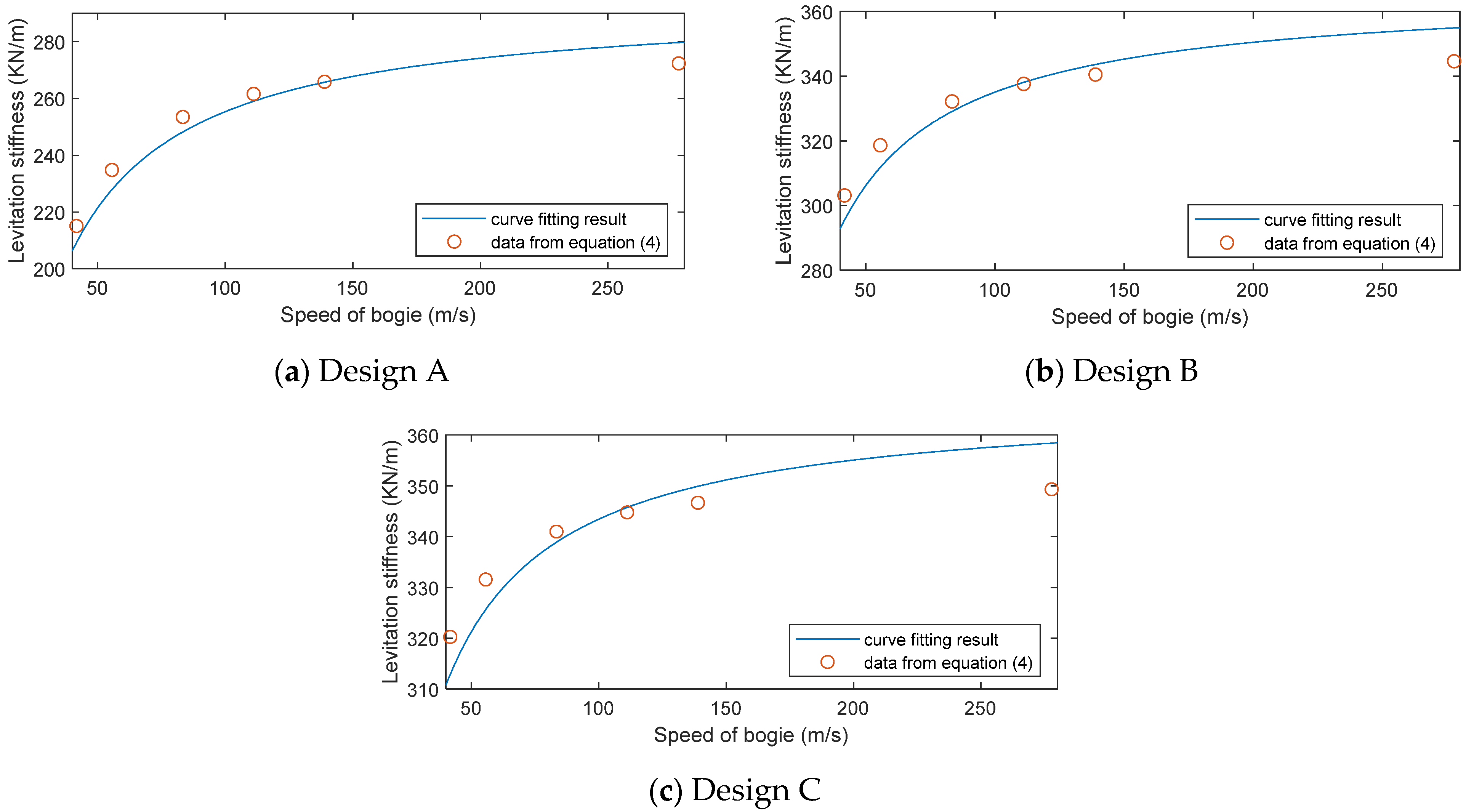
Figure 7.
Levitation stiffness with respect to the speed of the traveling body.
Figure 7.
Levitation stiffness with respect to the speed of the traveling body.
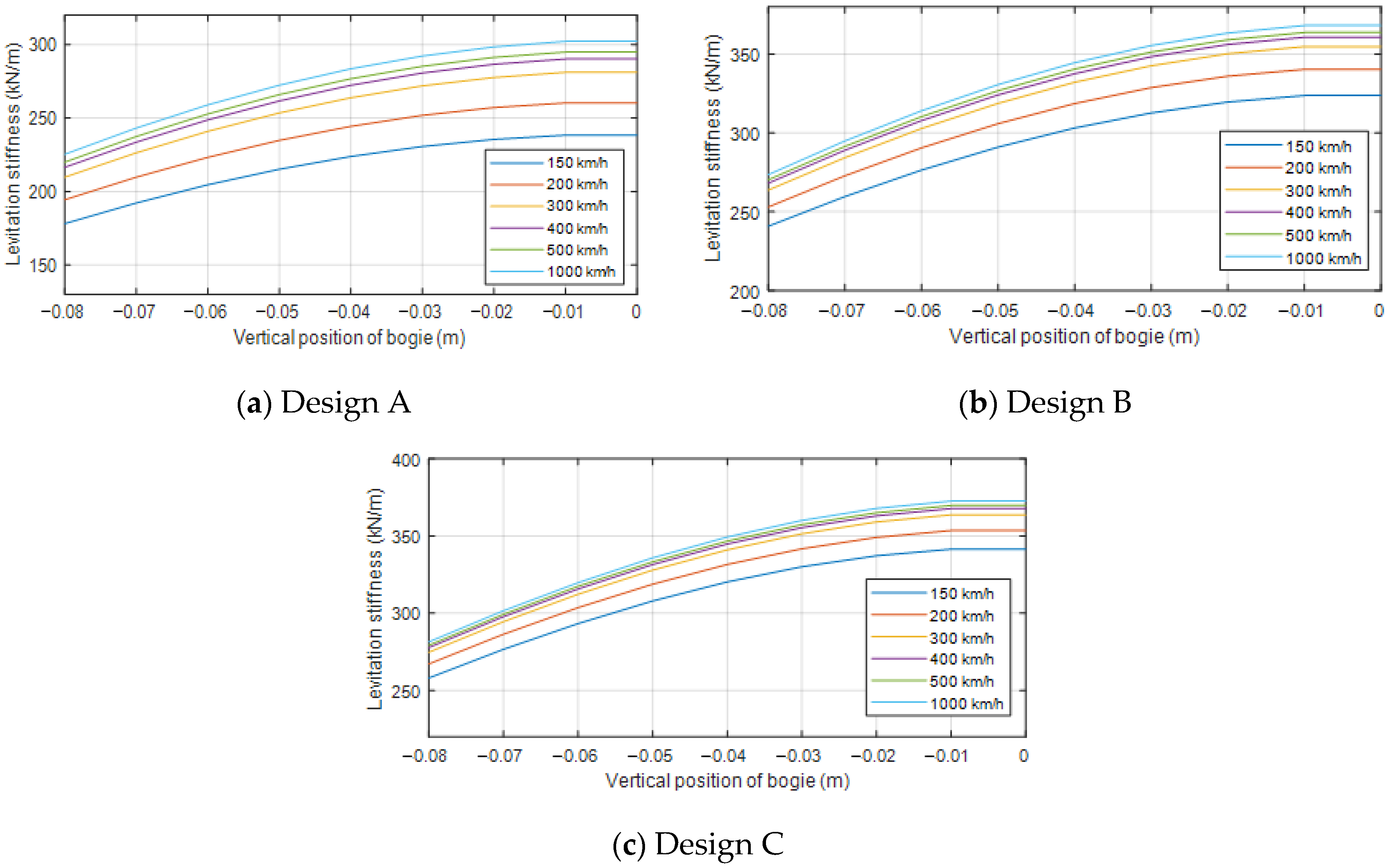
Figure 8.
Relationship between levitation stiffness and vertical position (average).
Figure 8.
Relationship between levitation stiffness and vertical position (average).
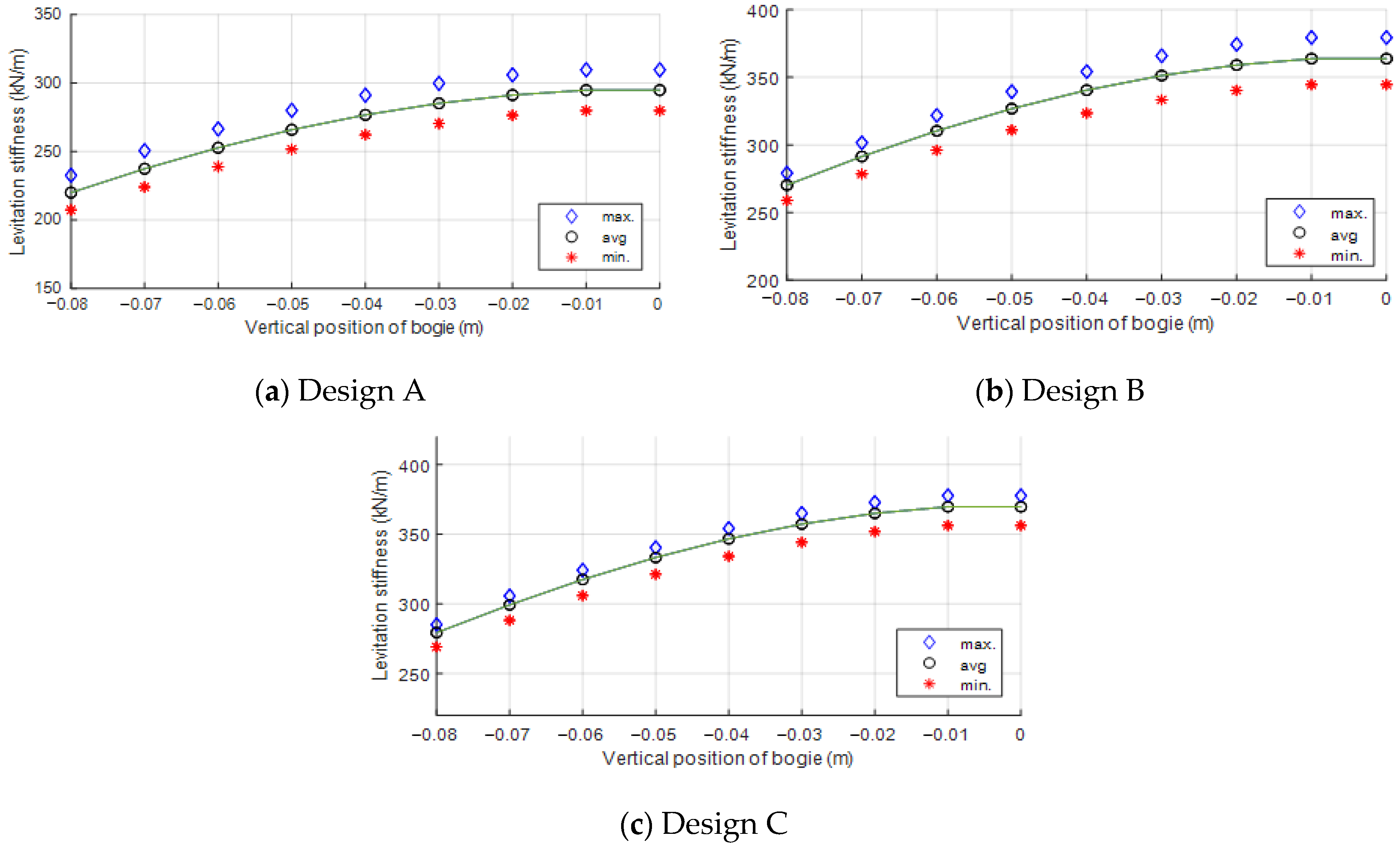
Figure 9.
Relationship between levitation stiffness and vertical position (average and fluctuation).
Figure 9.
Relationship between levitation stiffness and vertical position (average and fluctuation).
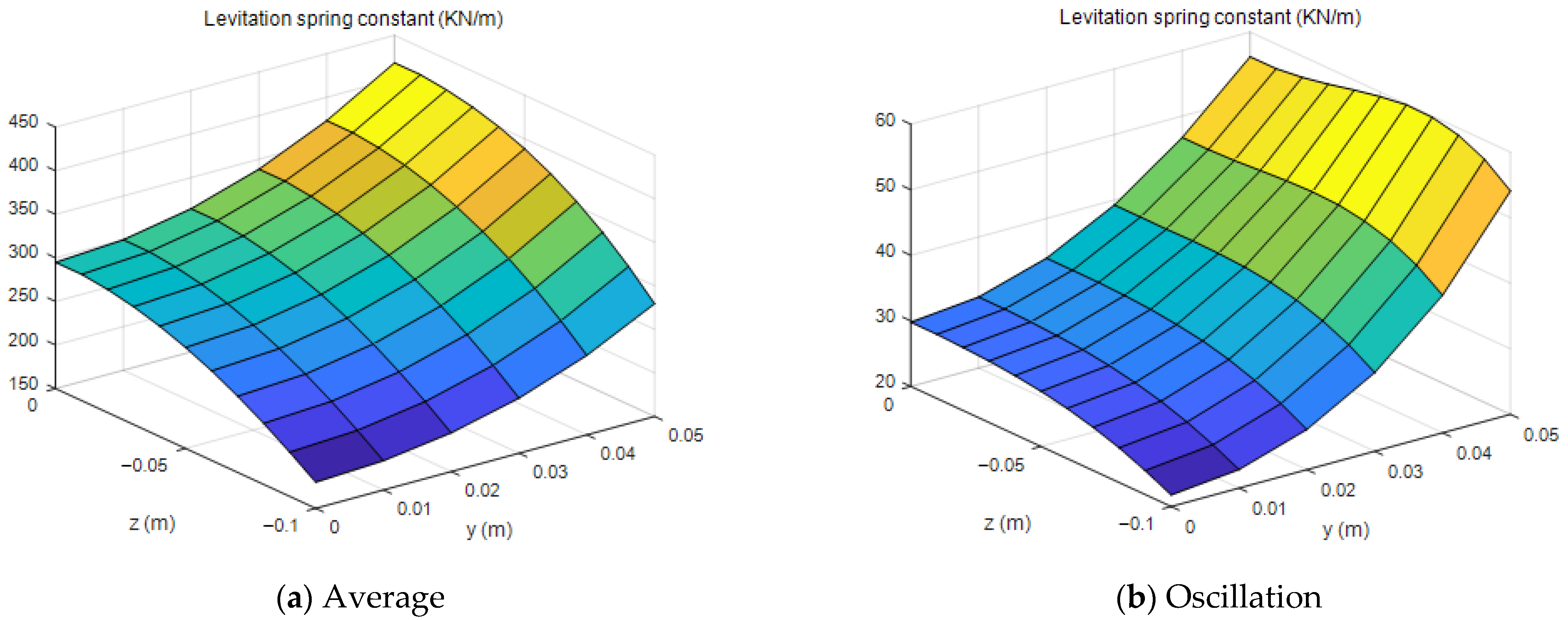
Figure 10.
Levitation stiffness with respect to vertical and lateral positions.
Figure 10.
Levitation stiffness with respect to vertical and lateral positions.
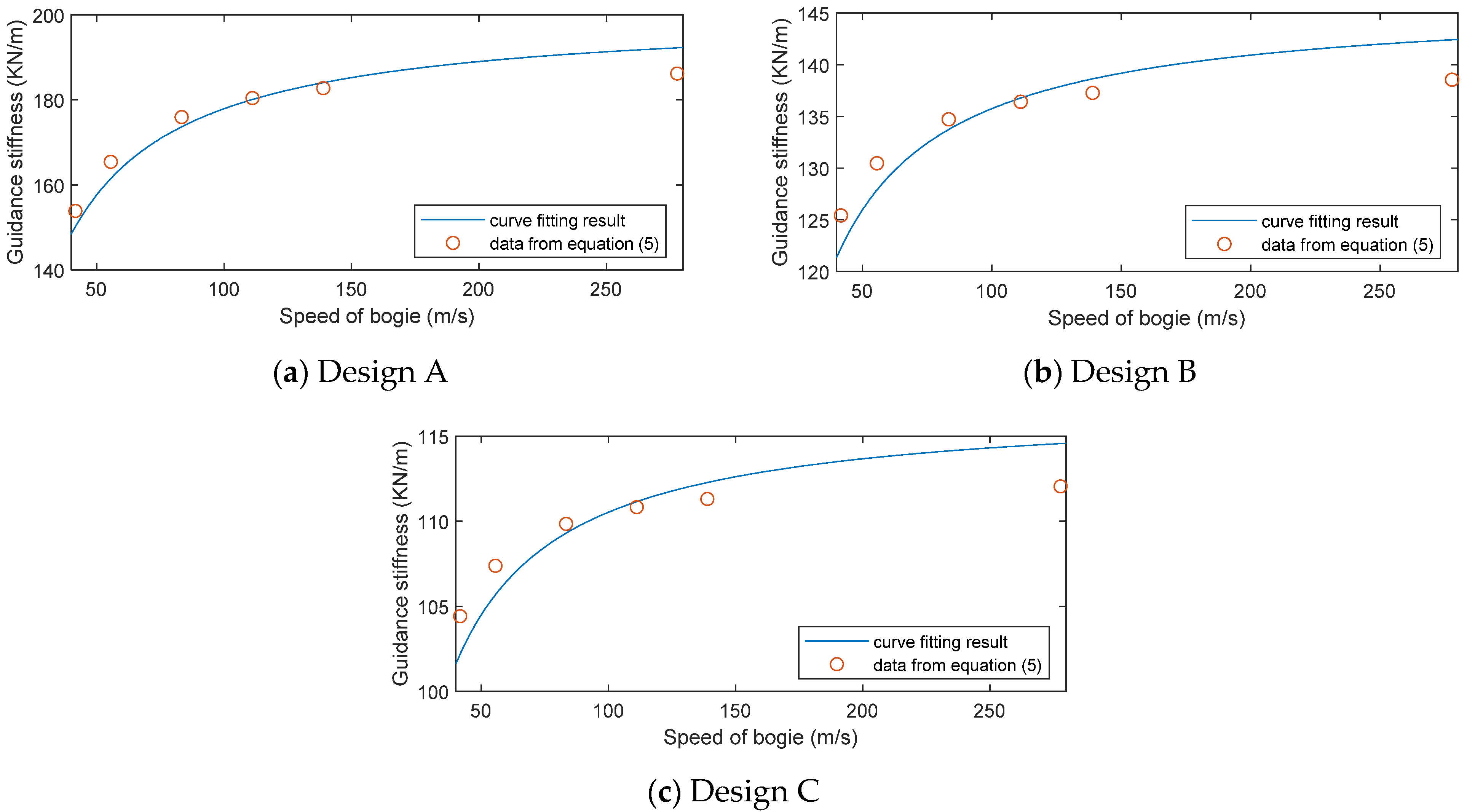
Figure 11.
Guidance stiffness with respect to the speed of the traveling body.
Figure 11.
Guidance stiffness with respect to the speed of the traveling body.
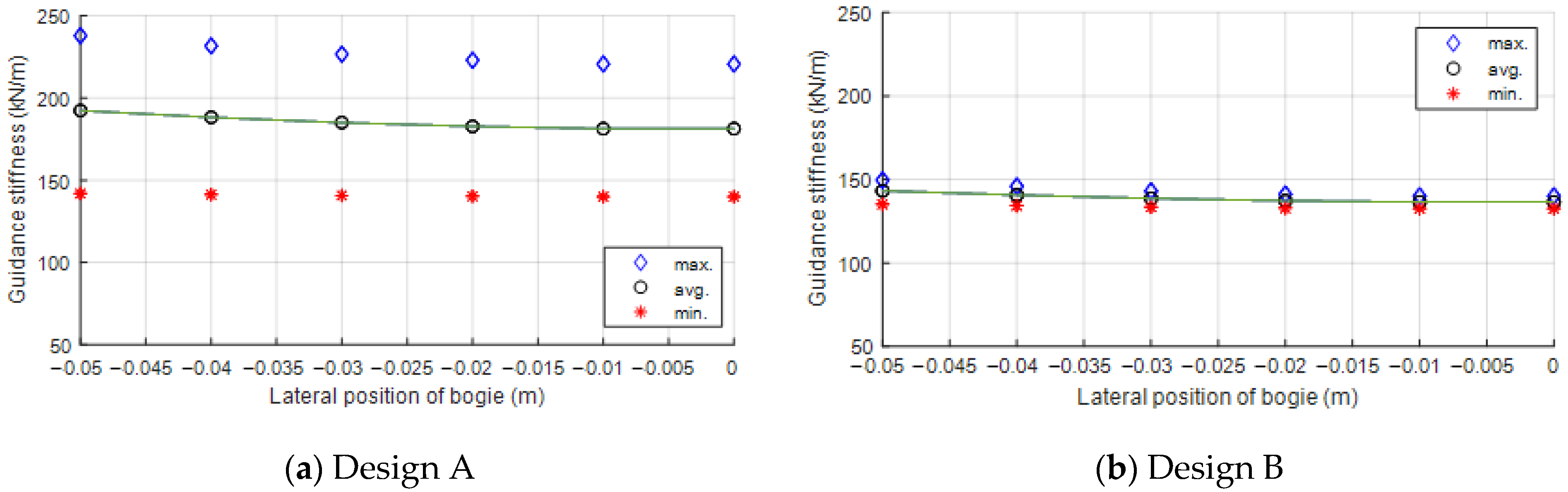
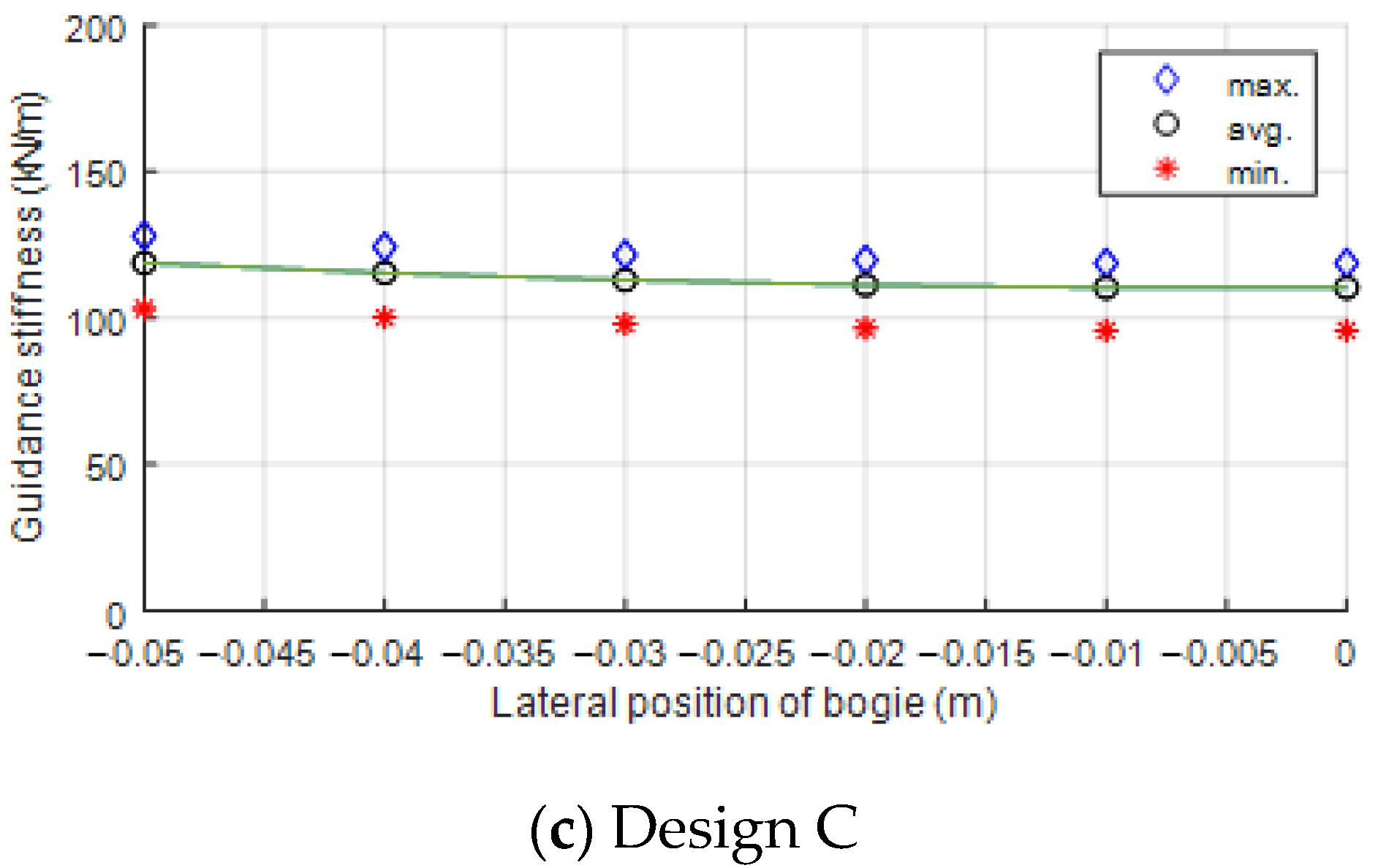
Figure 12.
Relationship between guidance stiffness and lateral position (average).
Figure 12.
Relationship between guidance stiffness and lateral position (average).
Figure 13.
Relationship between the guidance stiffness and the lateral position (average and fluctuation).
Figure 13.
Relationship between the guidance stiffness and the lateral position (average and fluctuation).
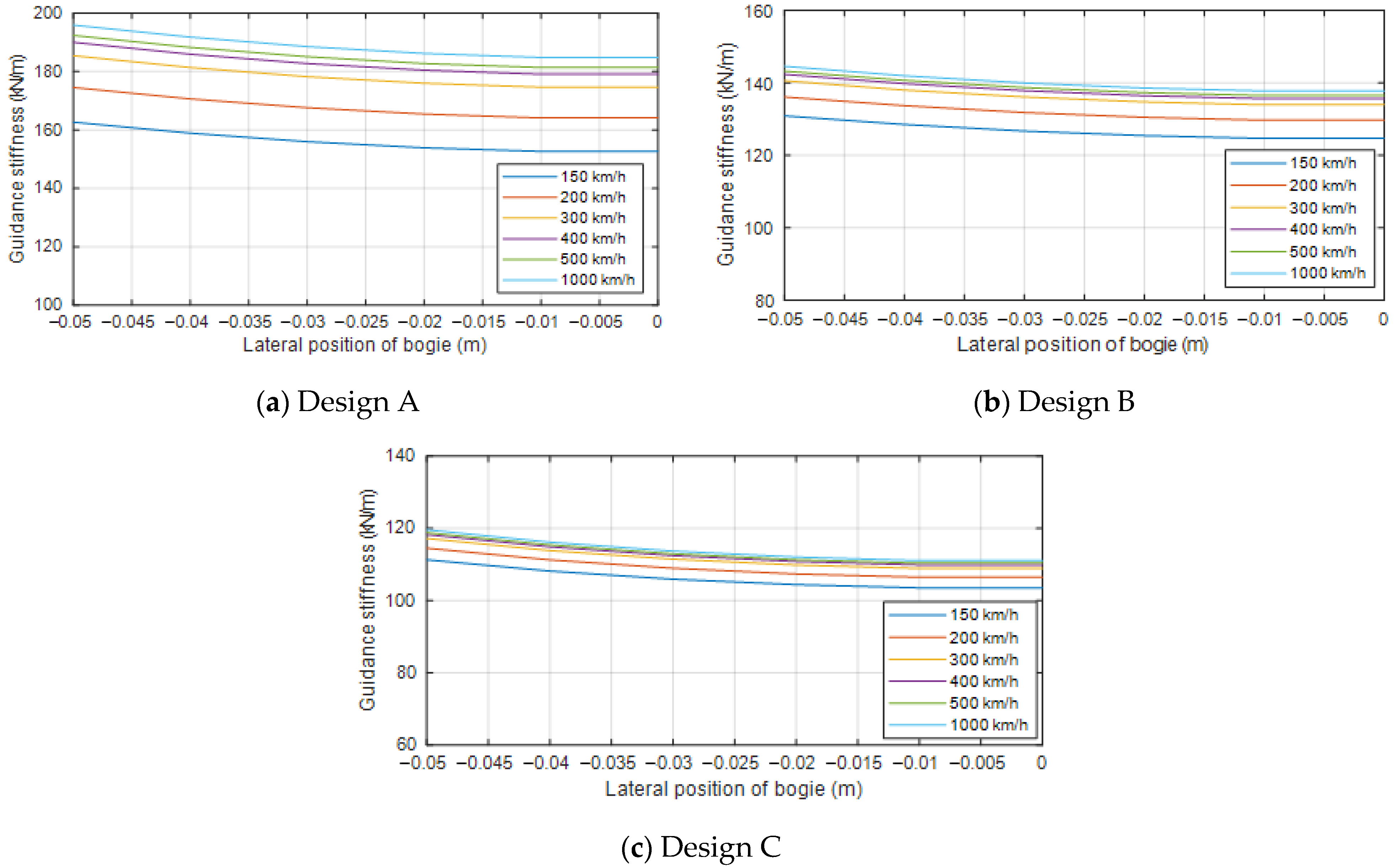
Figure 14.
Guidance stiffness with respect to the vertical and lateral positions.
Figure 14.
Guidance stiffness with respect to the vertical and lateral positions.
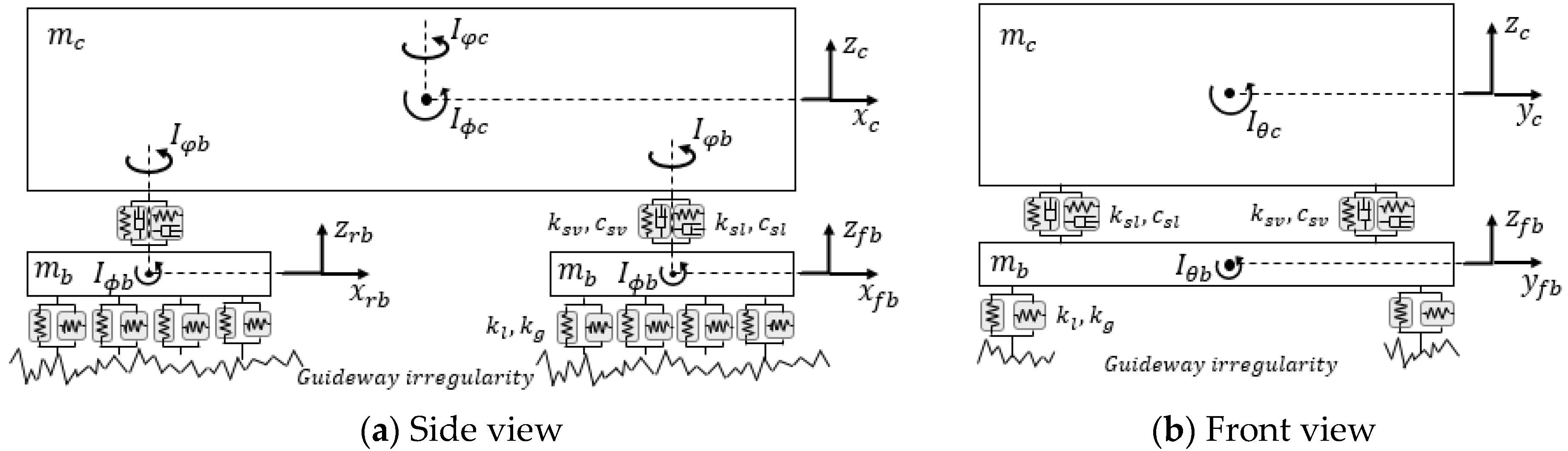
Figure 15.
Dynamic model of the capsule train with the main parameters.
Figure 15.
Dynamic model of the capsule train with the main parameters.
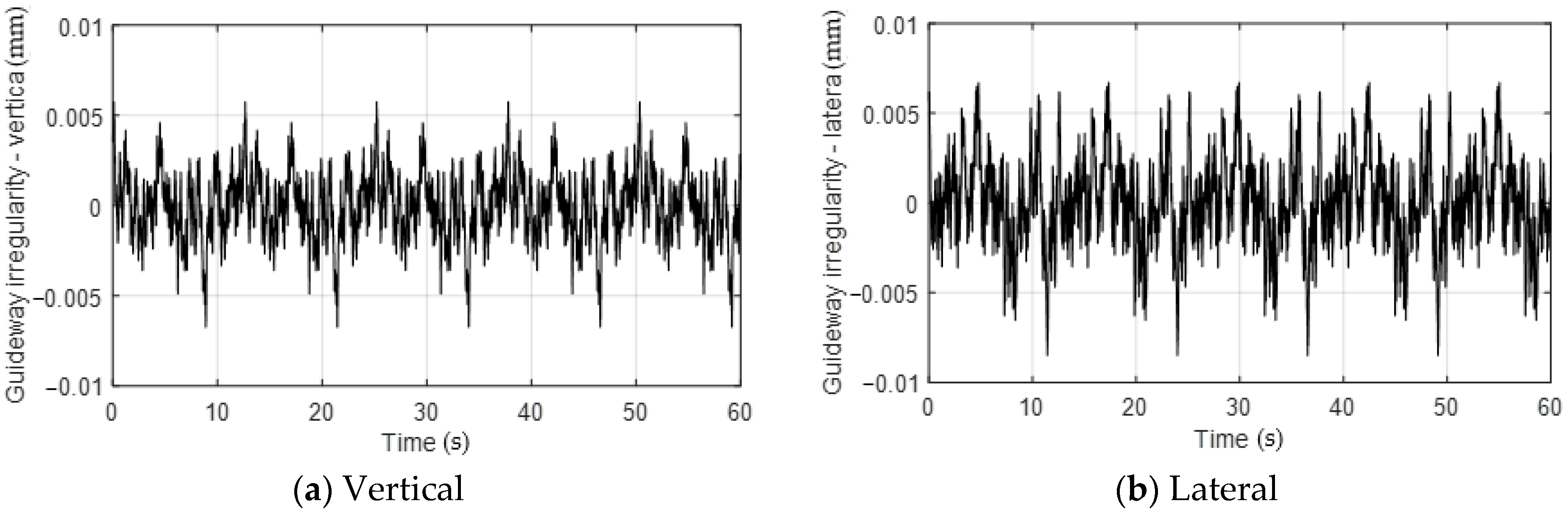
Figure 16.
Guideway irregularity in the vertical/lateral direction.
Figure 16.
Guideway irregularity in the vertical/lateral direction.
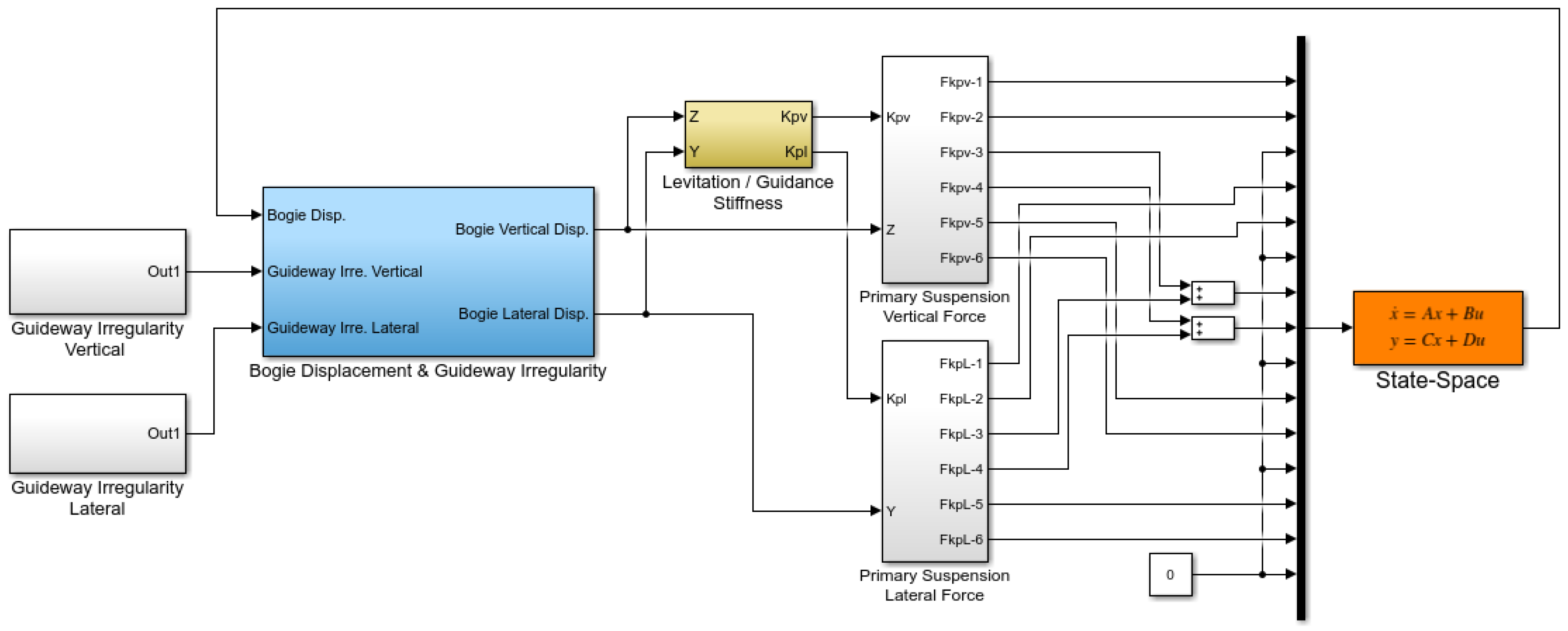
Figure 17.
Modeling of capsule vehicle with Simulink S/W.
Figure 17.
Modeling of capsule vehicle with Simulink S/W.
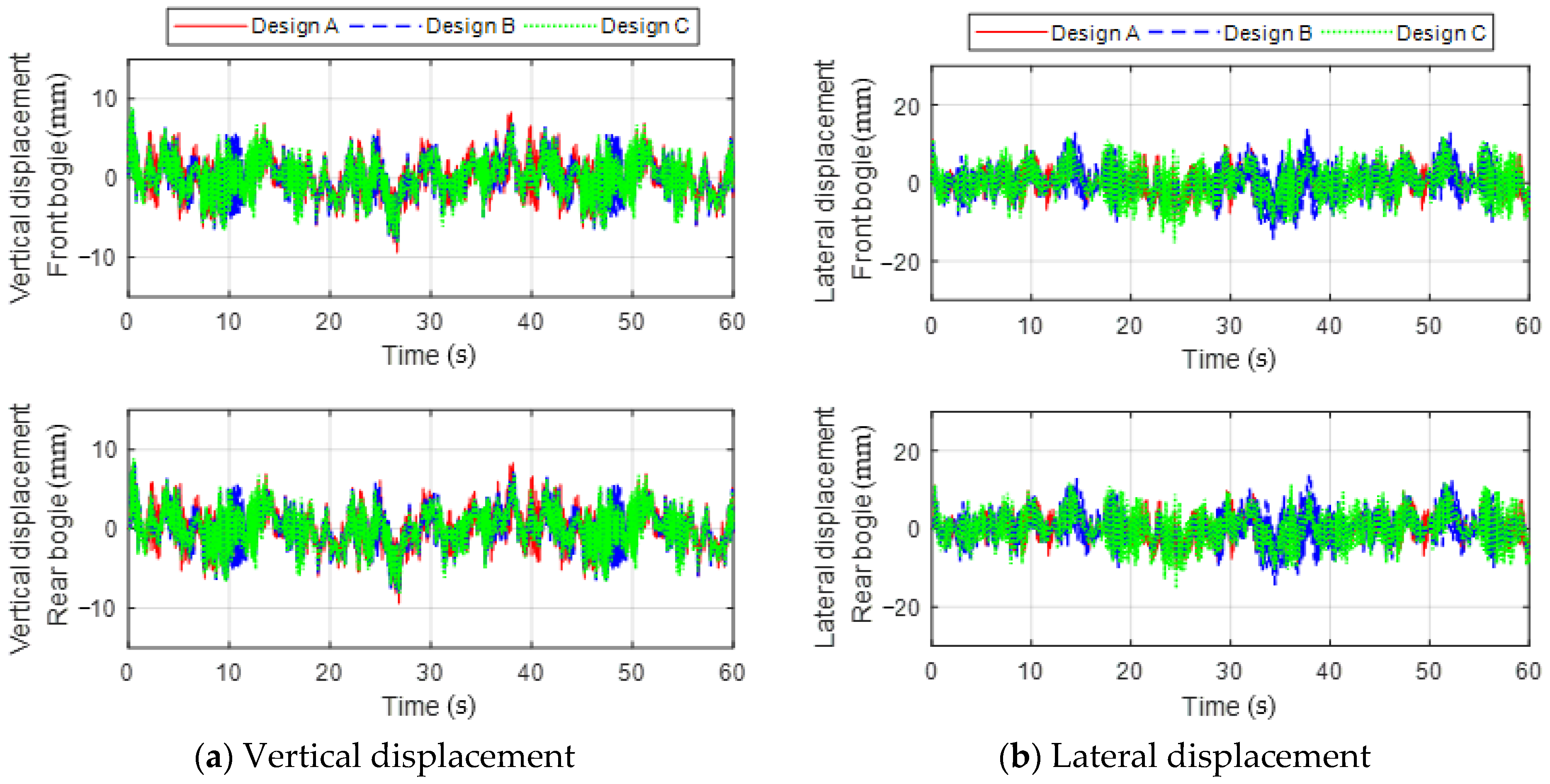
Figure 18.
Vertical and lateral displacements of the front and rear bogies at a speed of 300 km/h.
Figure 18.
Vertical and lateral displacements of the front and rear bogies at a speed of 300 km/h.
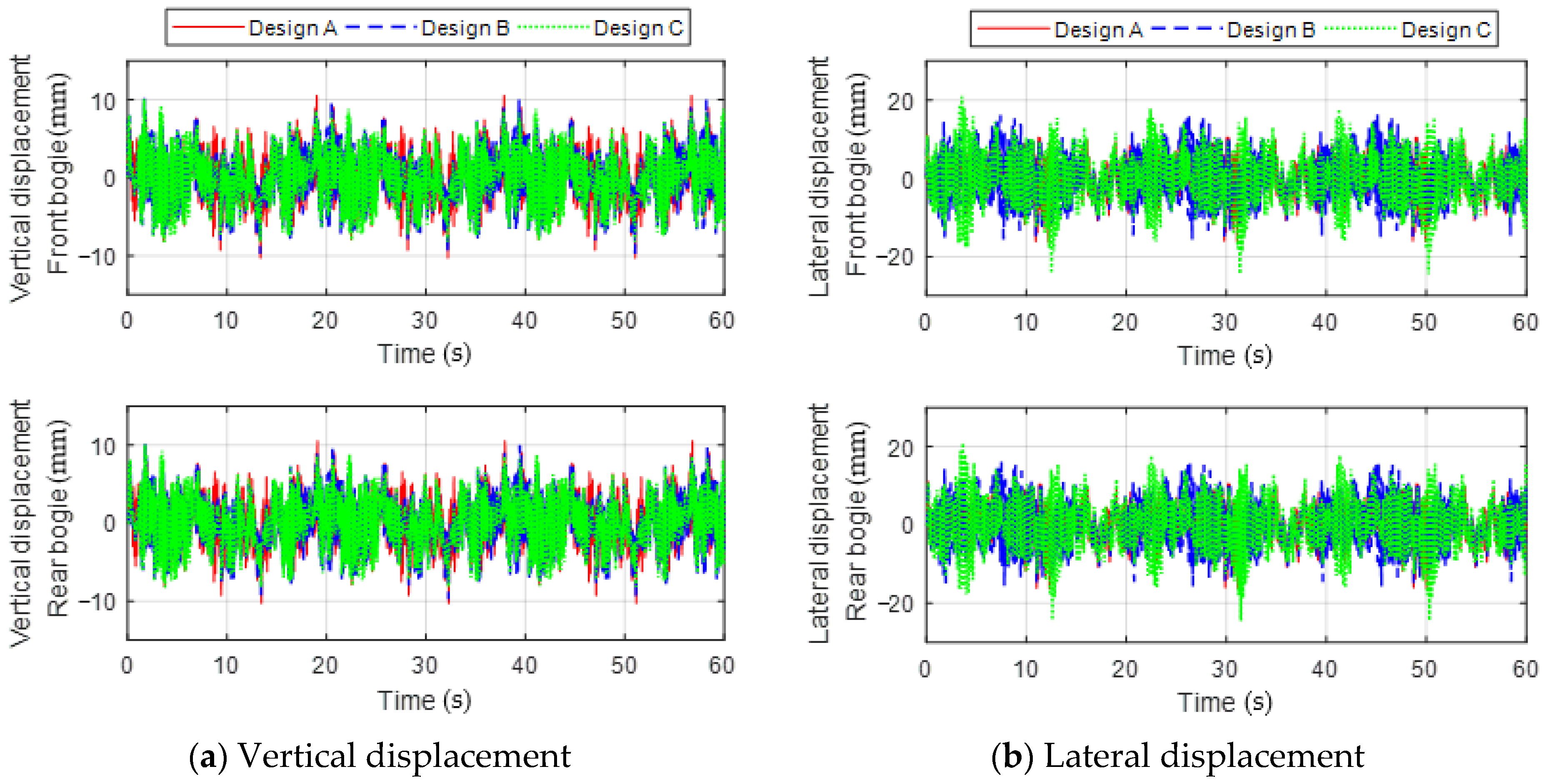
Figure 19.
Vertical and lateral displacements of the front and rear bogies at a speed of 600 km/h.
Figure 19.
Vertical and lateral displacements of the front and rear bogies at a speed of 600 km/h.
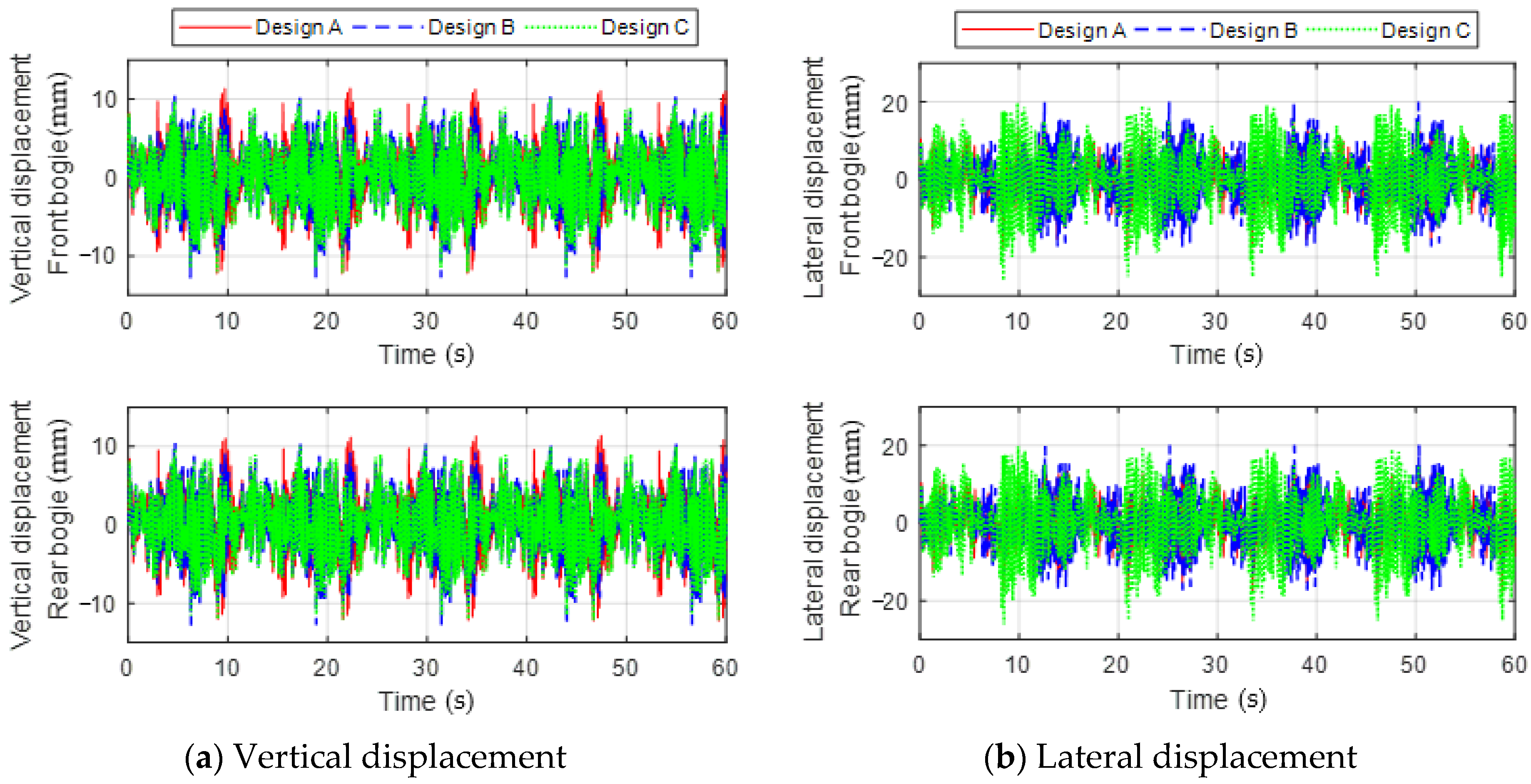
Figure 20.
Vertical and lateral displacements of the front and rear bogies at a speed of 900 km/h.
Figure 20.
Vertical and lateral displacements of the front and rear bogies at a speed of 900 km/h.
Figure 21.
RMS value of the vertical/lateral displacements of the bogie with respect to speed.
Figure 21.
RMS value of the vertical/lateral displacements of the bogie with respect to speed.
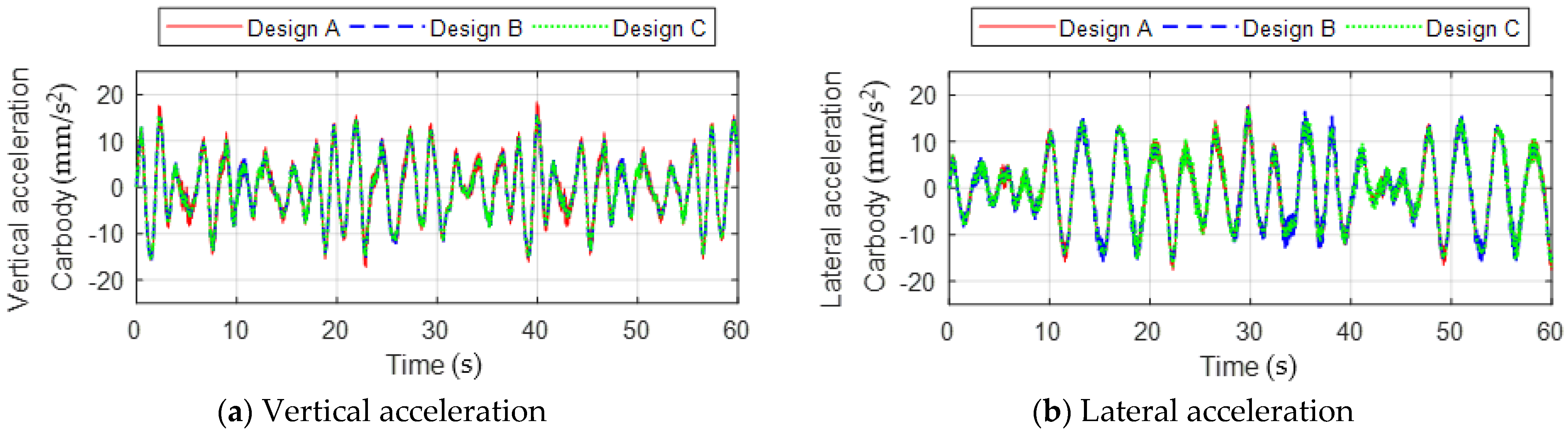
Figure 22.
Vertical and lateral accelerations of a carbody at a speed of 300 km/h.
Figure 22.
Vertical and lateral accelerations of a carbody at a speed of 300 km/h.
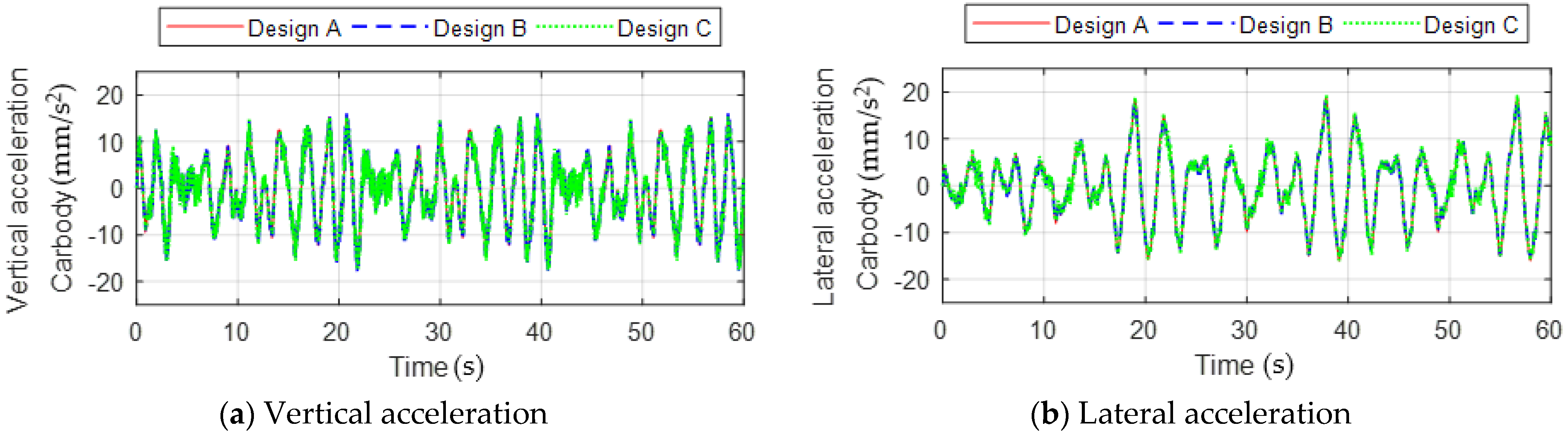
Figure 23.
Vertical and lateral accelerations of the carbody at a speed of 600 km/h.
Figure 23.
Vertical and lateral accelerations of the carbody at a speed of 600 km/h.
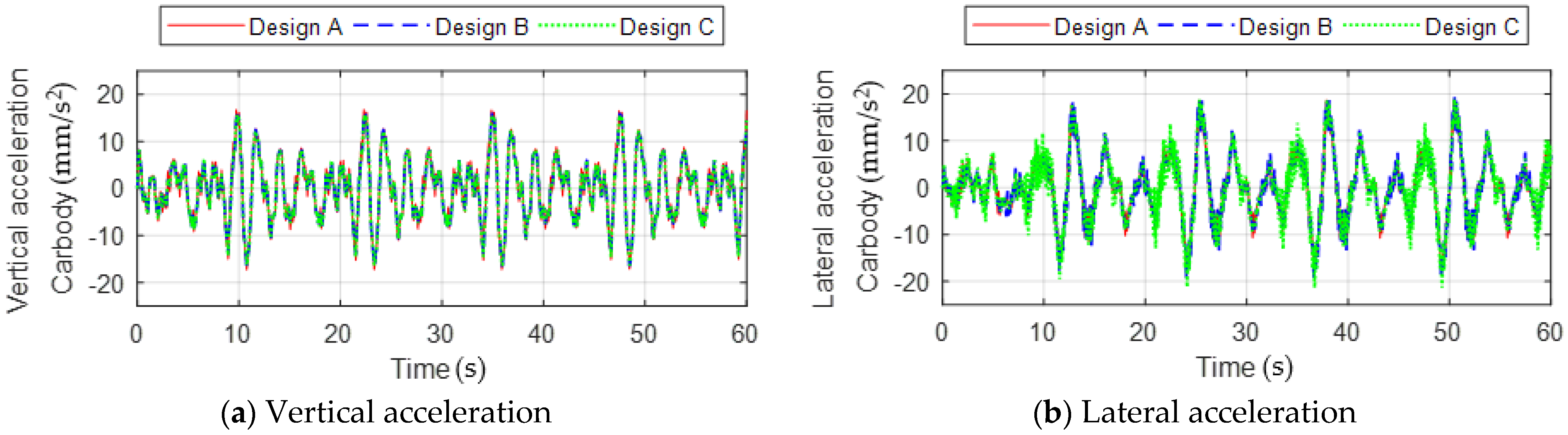
Figure 24.
Vertical and lateral accelerations of a carbody at a speed of 900 km/h.
Figure 24.
Vertical and lateral accelerations of a carbody at a speed of 900 km/h.
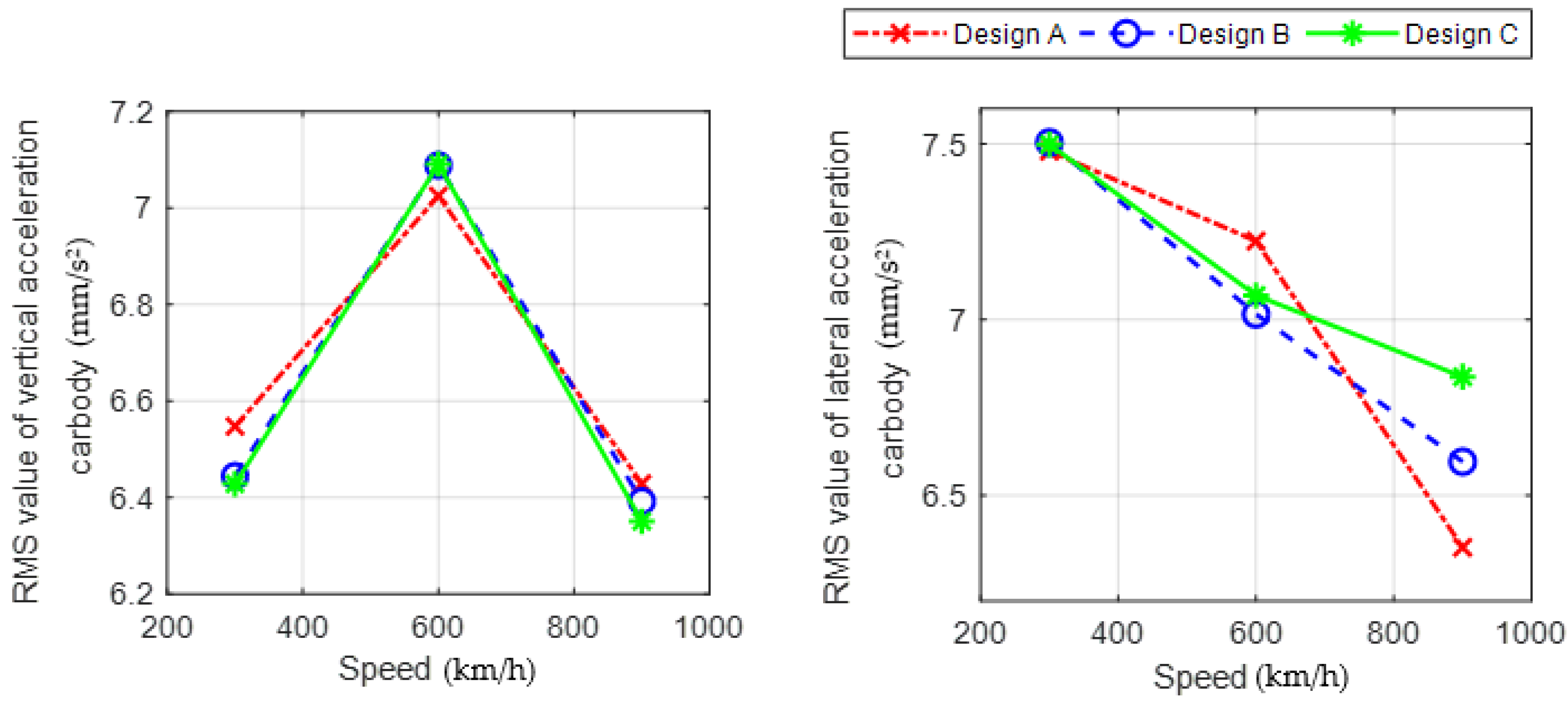
Figure 25.
RMS value of the vertical/lateral acceleration with respect to speed.
Figure 25.
RMS value of the vertical/lateral acceleration with respect to speed.
Table 1.
Design models of levitation coil.
Table 1.
Design models of levitation coil.
| Design | Pole Pitch (mm) | Lxc (mm) | Lyc (mm) | Number of Turns in the Coil |
|---|
| A | 270 | 180 | 290 | 12 |
| B | 405 | 285 | 280 | 18 |
| C | 540 | 390 | 280 | 24 |
Table 2.
Balance position of levitation force.
Table 2.
Balance position of levitation force.
| Position z (m) | Levitation Force (kN) |
|---|
| Design A | Design B | Design C |
|---|
| −0.03 | 8.5539 | 10.5392 | 10.7192 |
| −0.04 | 11.0692 | 13.5549 | 13.7655 |
| −0.05 | 13.2920 | 16.2613 | 16.5397 |
Table 3.
Average value and fluctuation in levitation/guidance force.
Table 3.
Average value and fluctuation in levitation/guidance force.
| Design | Design A | Design B | Design C |
|---|
| Levitation force (kN) | Average | 13.2920 | 13.5549 | 13.7655 |
| Fluctuation (0–peak) | 0.7106 | 0.6150 | 0.4010 |
| Rate of fluctuation (%) | 5.35 | 4.54 | 2.91 |
| Guidance force (kN) | Average | 3.6324 | 2.7399 | 2.1630 |
| Fluctuation (0–peak) | 0.8271 | 0.0827 | 0.2331 |
| Rate of fluctuation (%) | 22.77 | 3.02 | 10.78 |
Table 4.
Parameter values of levitation stiffness.
Table 4.
Parameter values of levitation stiffness.
| Parameter | Design A | Design B | Design C |
|---|
| 264,400 | 366,600 | 367,100 |
| 14.22 | 8.99 | 6.66 |
Table 5.
Coefficients of levitation stiffness (average and oscillation).
Table 5.
Coefficients of levitation stiffness (average and oscillation).
| Design | | | |
|---|
| A | | | 0.270 |
| |
| B | | | 0.405 |
| |
| C | | | 0.540 |
| |
Table 6.
Mathematical expressions of the levitation stiffness.
Table 6.
Mathematical expressions of the levitation stiffness.
| Design | Equation | | |
|---|
| A |
| 0.05 | 14.22 |
| B |
| 0.04 | 8.99 |
| C |
| 0.04 | 6.66 |
Table 7.
Parameter values of guidance stiffness.
Table 7.
Parameter values of guidance stiffness.
| Parameter | Design A | Design B | Design C |
|---|
| 200,800 | 146,300 | 116,900 |
| 12.09 | 7.48 | 5.60 |
Table 8.
Coefficients of the guidance stiffness (average and oscillation).
Table 8.
Coefficients of the guidance stiffness (average and oscillation).
| Design | | | |
|---|
| A | | | 0.270 |
| |
| B | | | 0.405 |
| |
| C | | | 0.540 |
| |
Table 9.
Mathematical expressions of the guidance stiffness.
Table 9.
Mathematical expressions of the guidance stiffness.
| Design | Equation | | d |
|---|
| A | | 0.05 | 12.09 |
| B | | 0.04 | 7.48 |
| C | | 0.04 | 5.60 |
Table 10.
Parameters of the capsule vehicle for simulation.
Table 10.
Parameters of the capsule vehicle for simulation.
| Parameter | Value | Parameter | Value |
|---|
| | | |
| | | |
| | | |
| | | |
| | | |
| | | |


 ,
, 


























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}