
Differential Evolution-Based Overcurrent Protection for DC Microgrids



Abstract
:1. Introduction
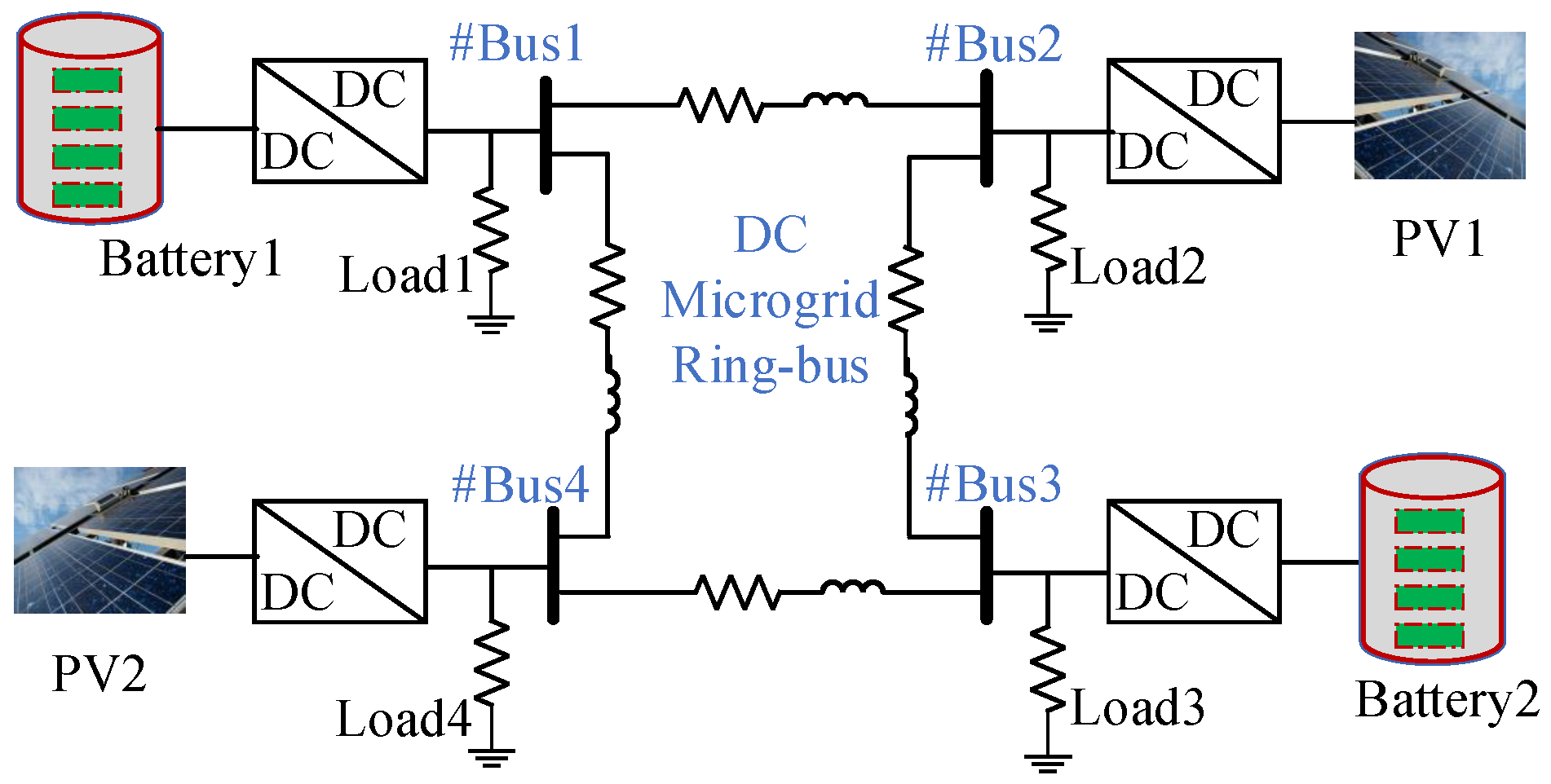
2. The Simplified DC Microgrid Model
2.1. DC Microgrid System Complex Model Configuration under Conversion
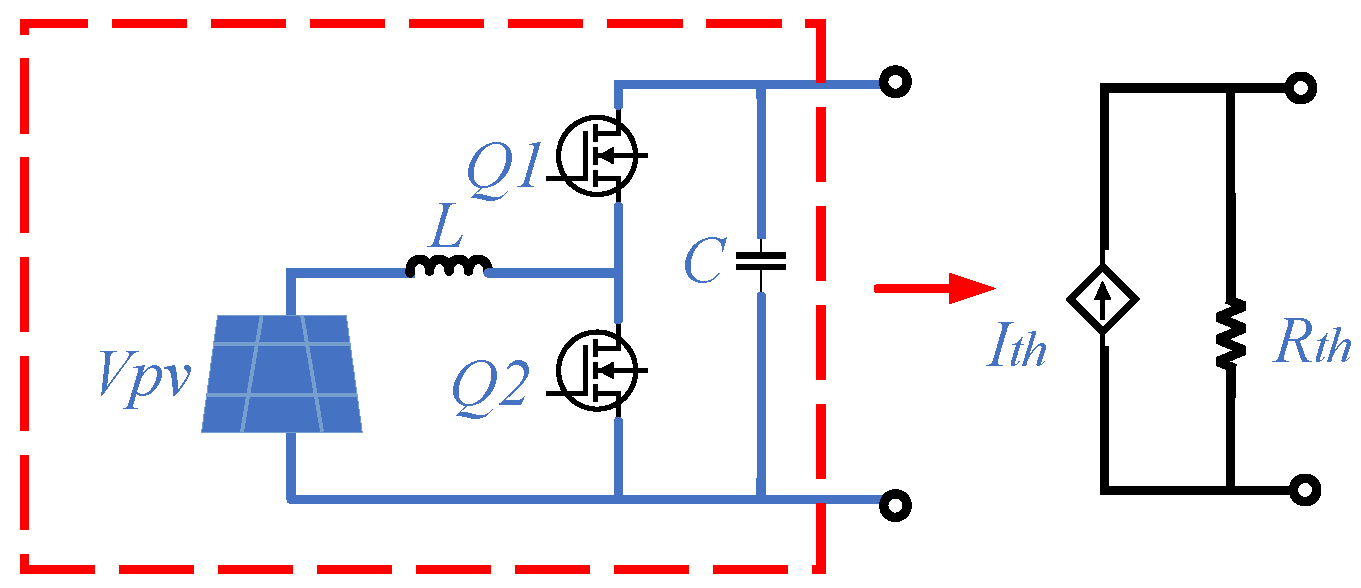
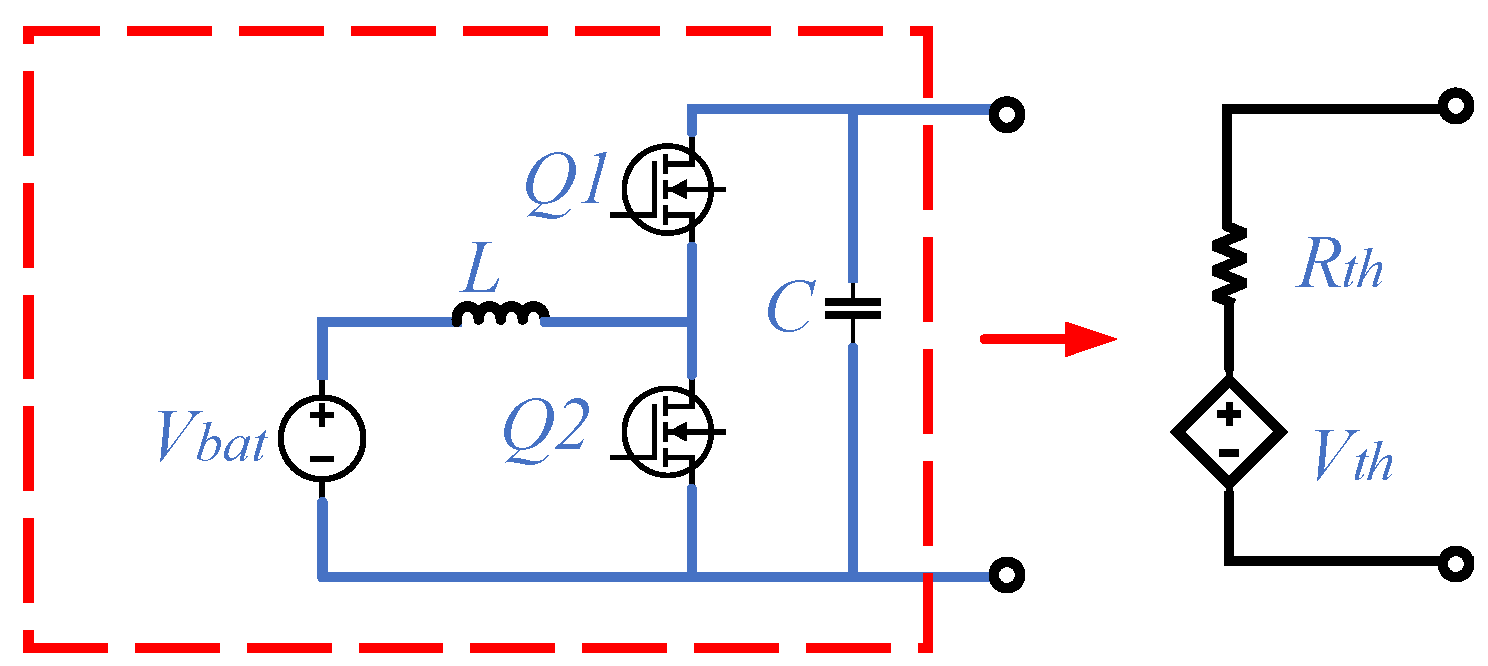
2.2. Simplified Model
2.2.1. PV System Model
2.2.2. Battery System Model
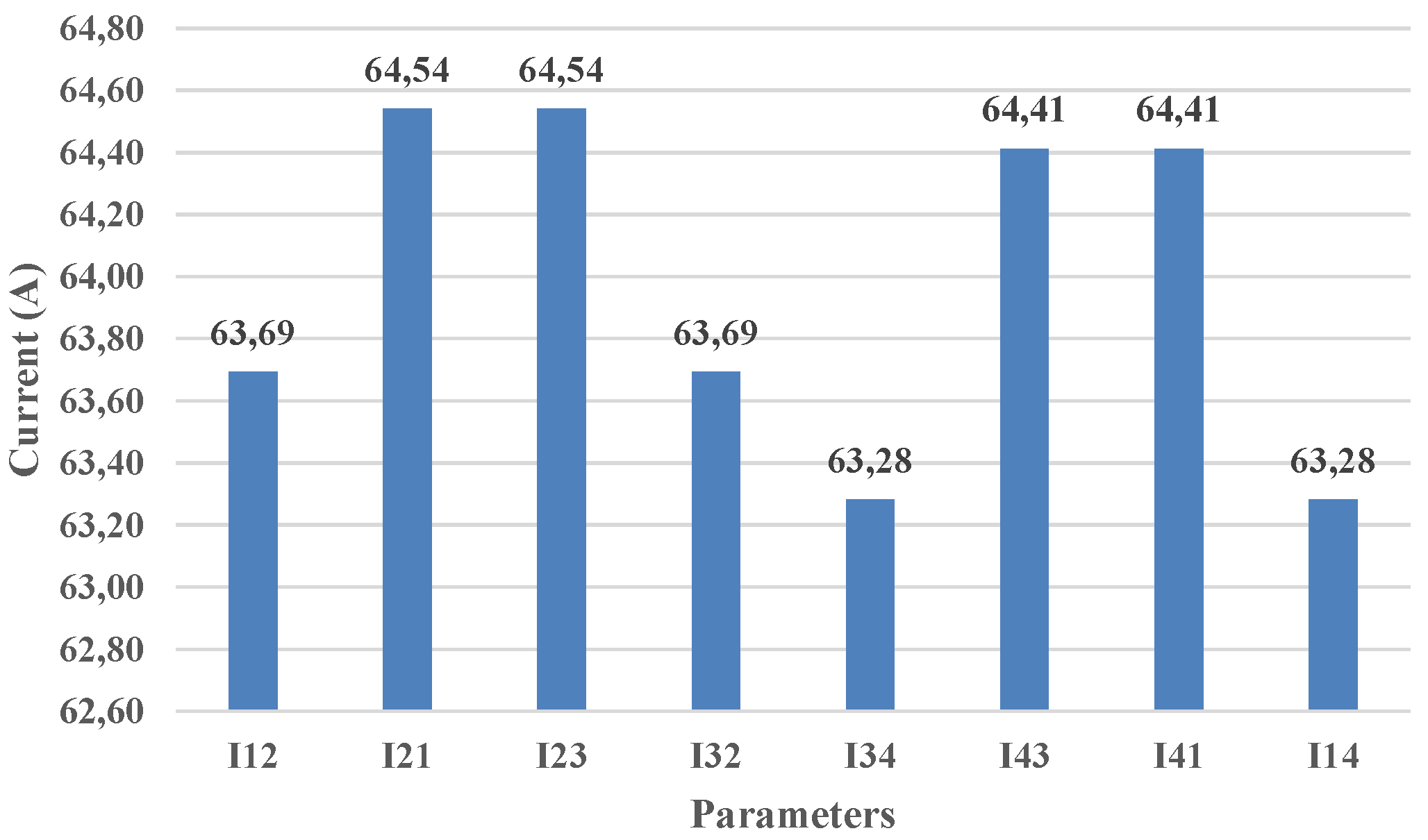
2.3. Current Flow Analysis
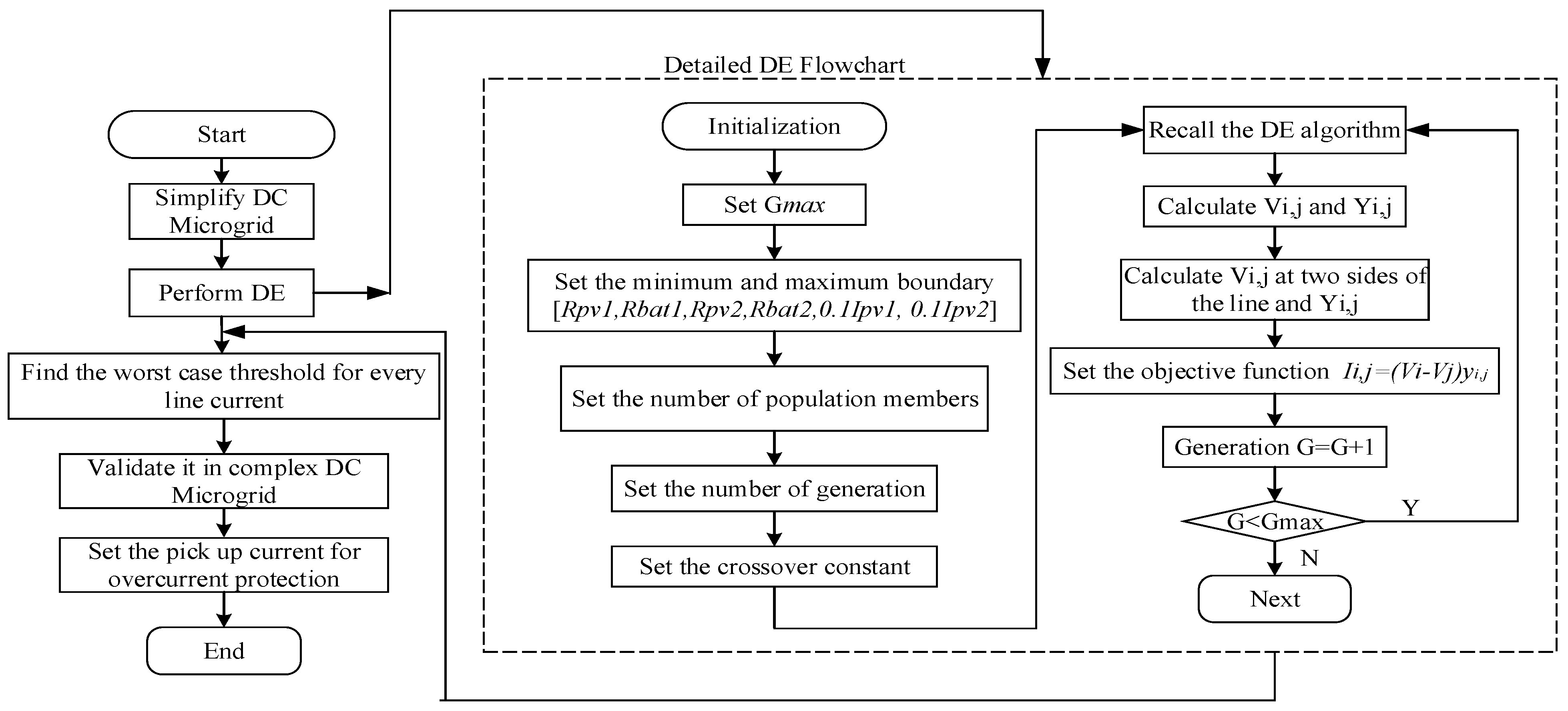
2.4. Differential Evolution
3. Case Study
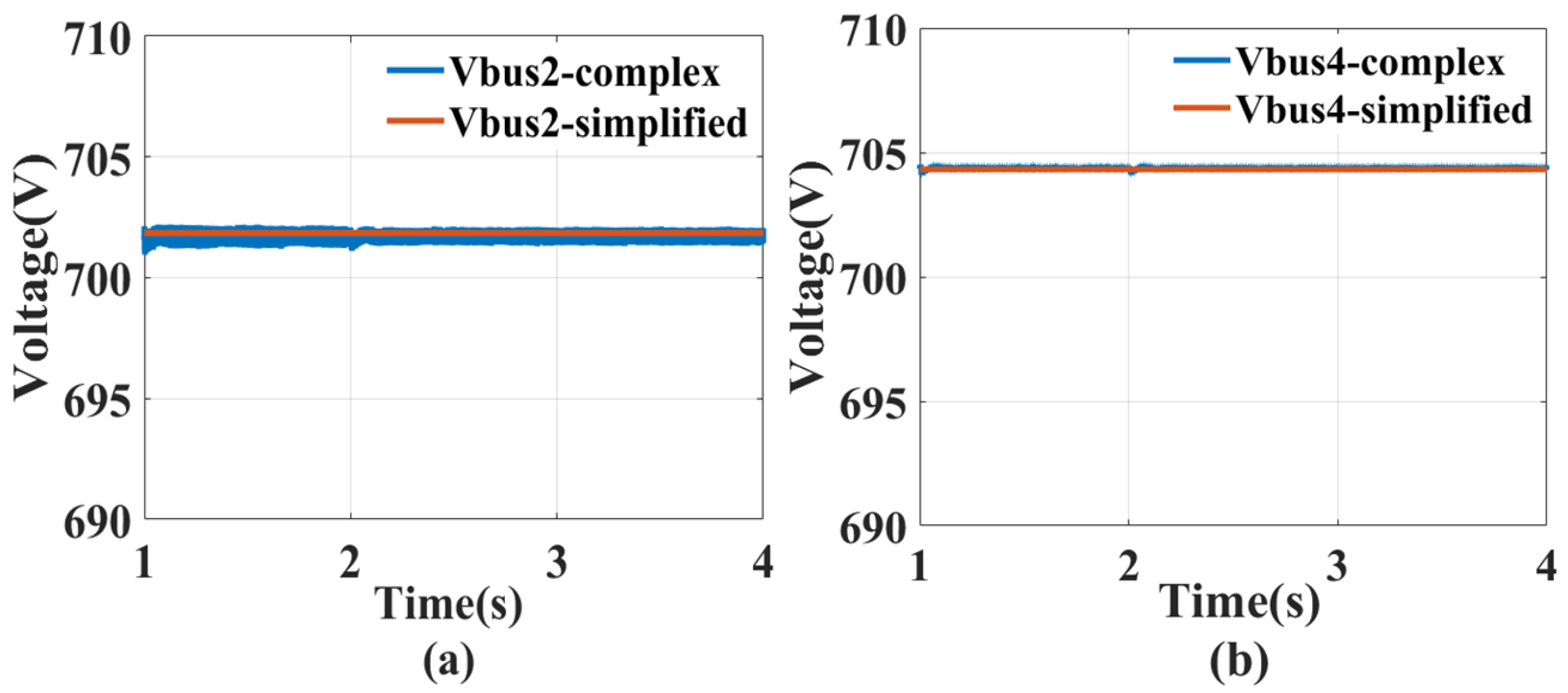
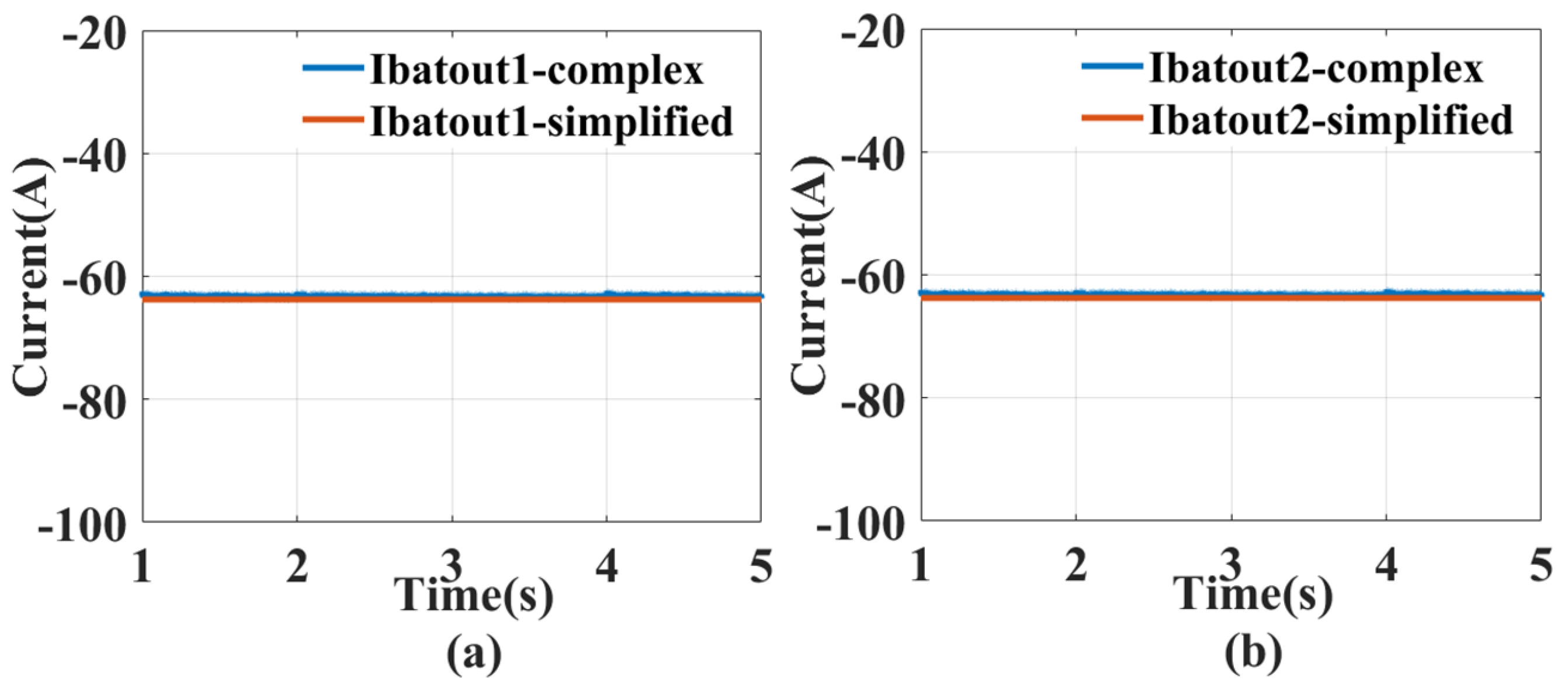
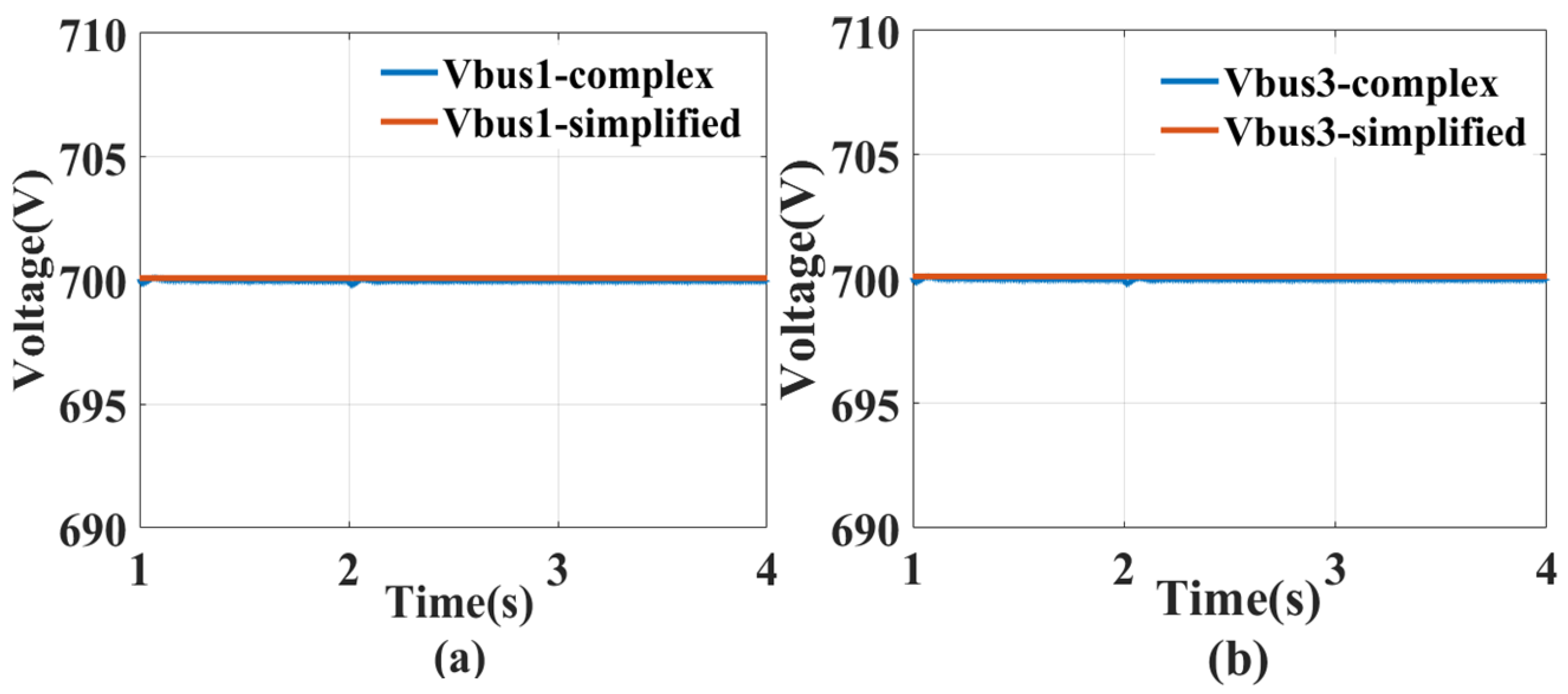
3.1. Verification of The Simplified Model
3.2. Power Flow Calculation Using Differential Evolution
3.2.1. Four-Bus Ring System
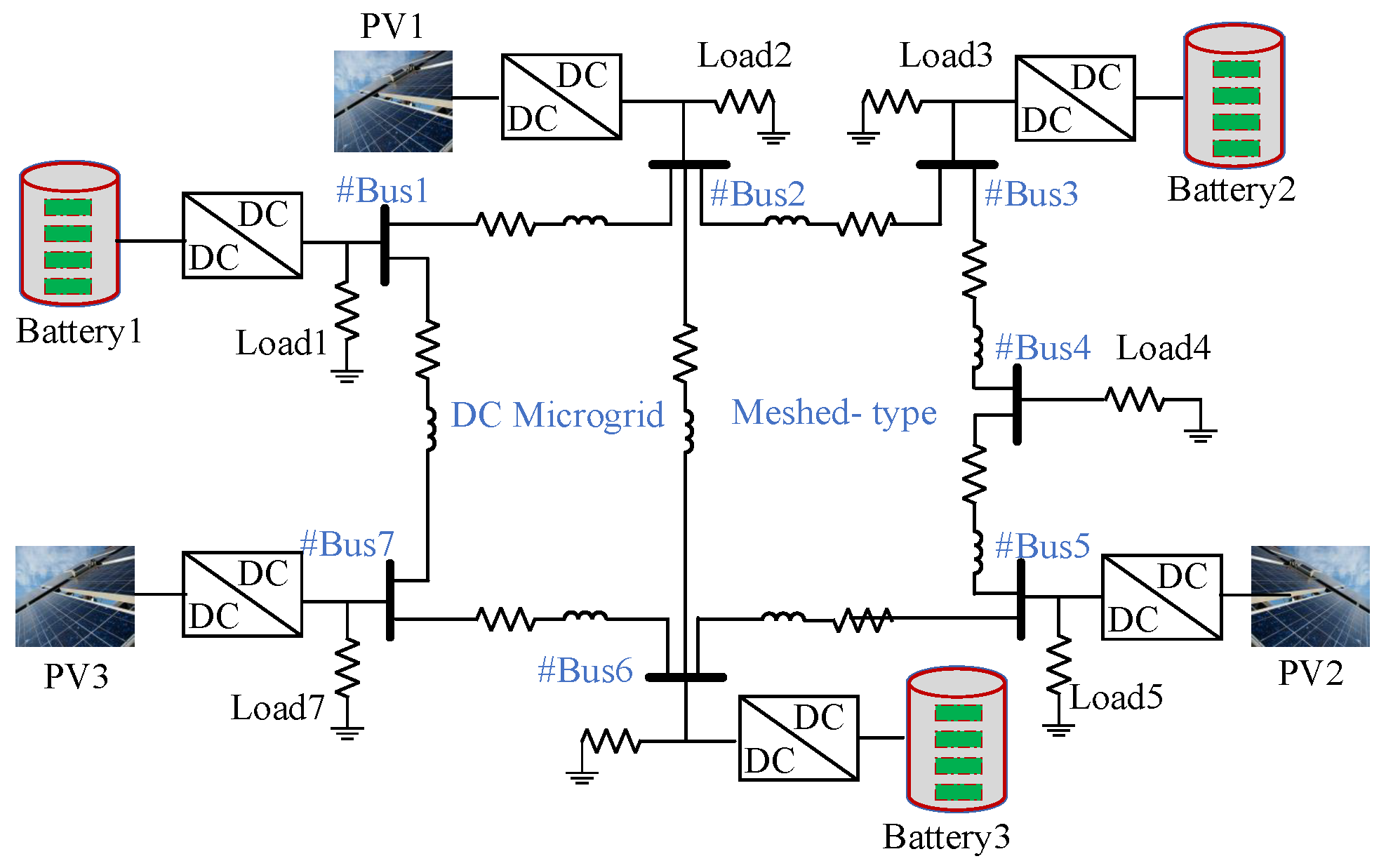
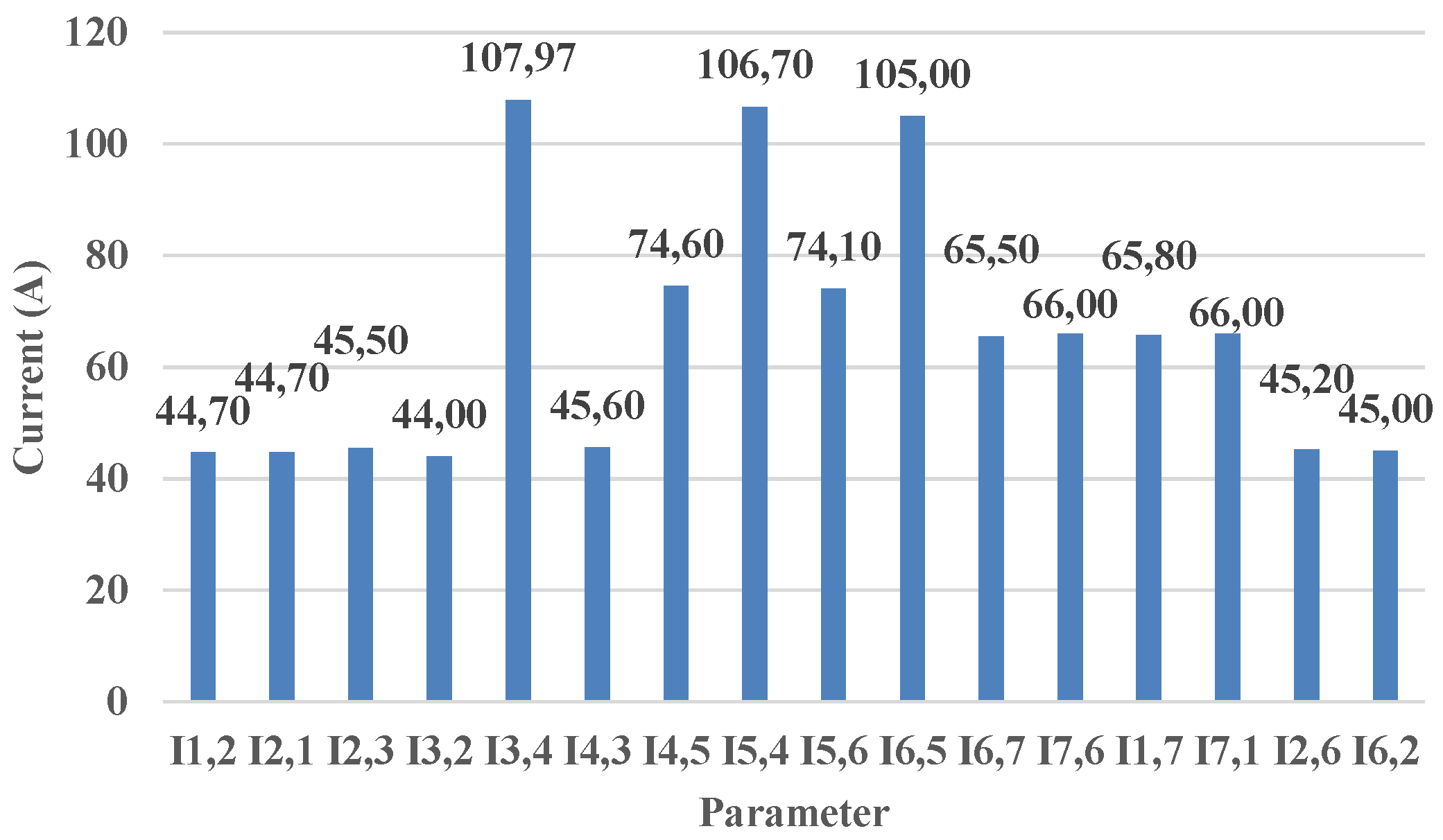
3.2.2. Seven-Bus Mesh System
3.3. Protection Issues Case Study
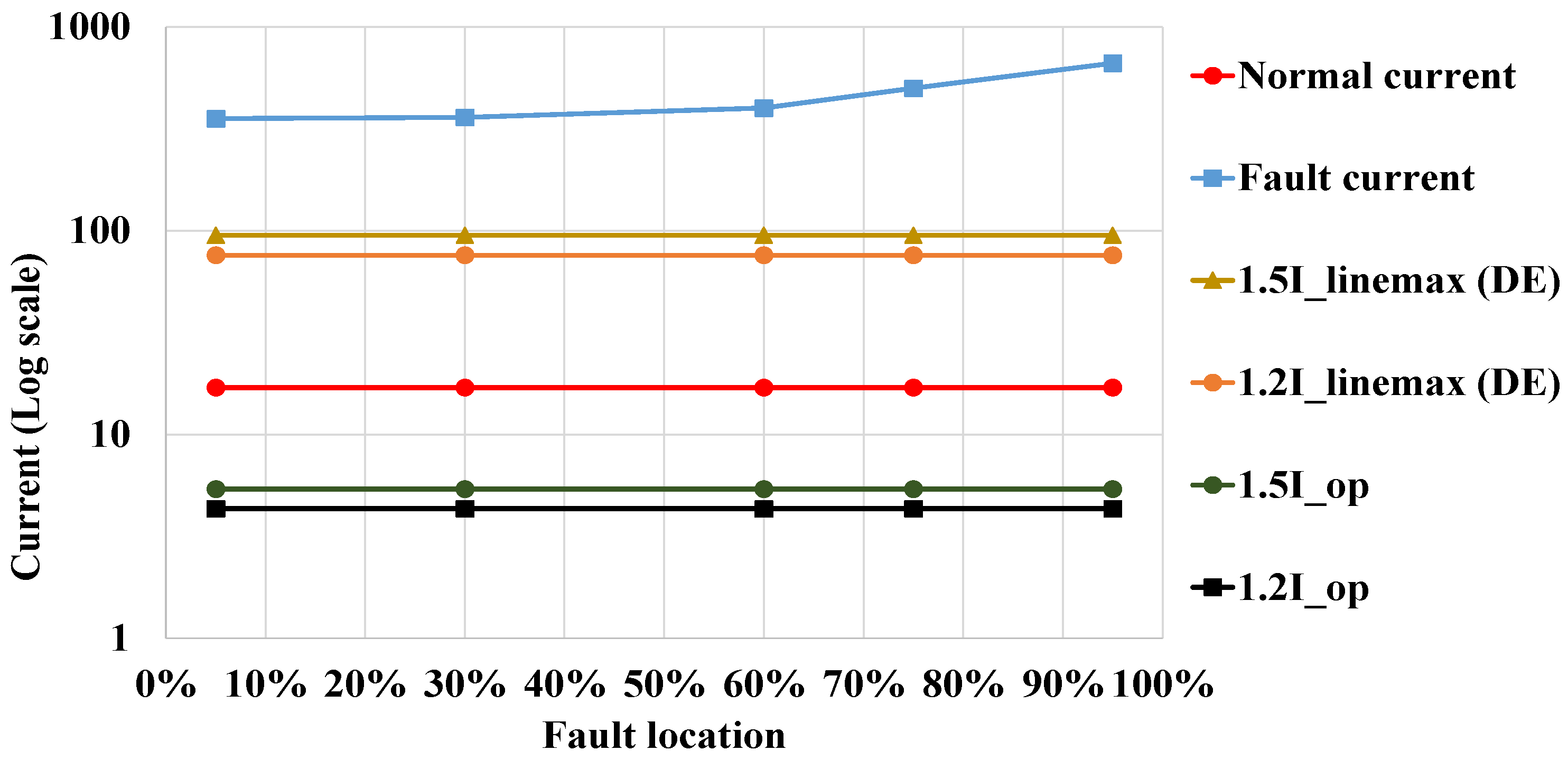
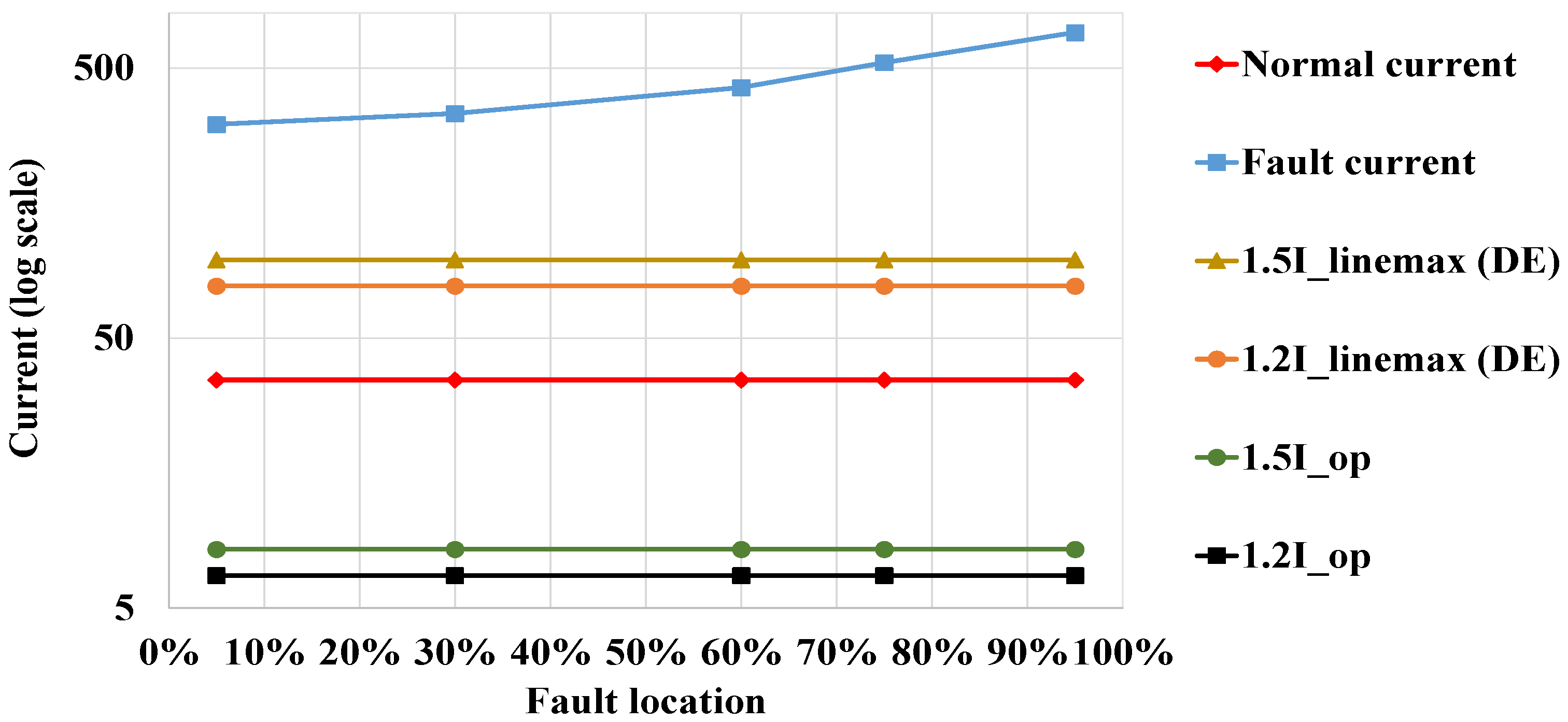
3.3.1. Fault Occurs at Different Locations of Transmission Line
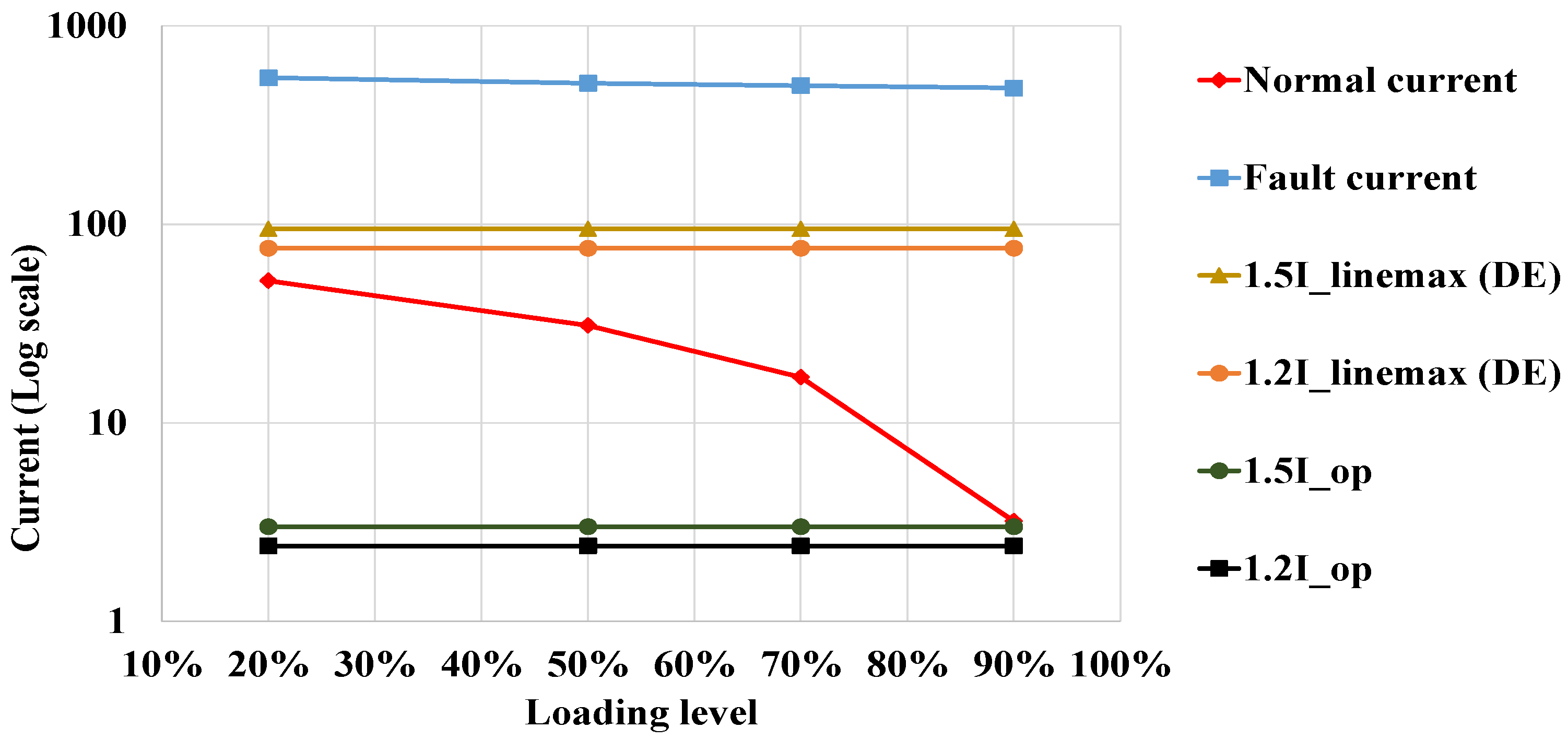
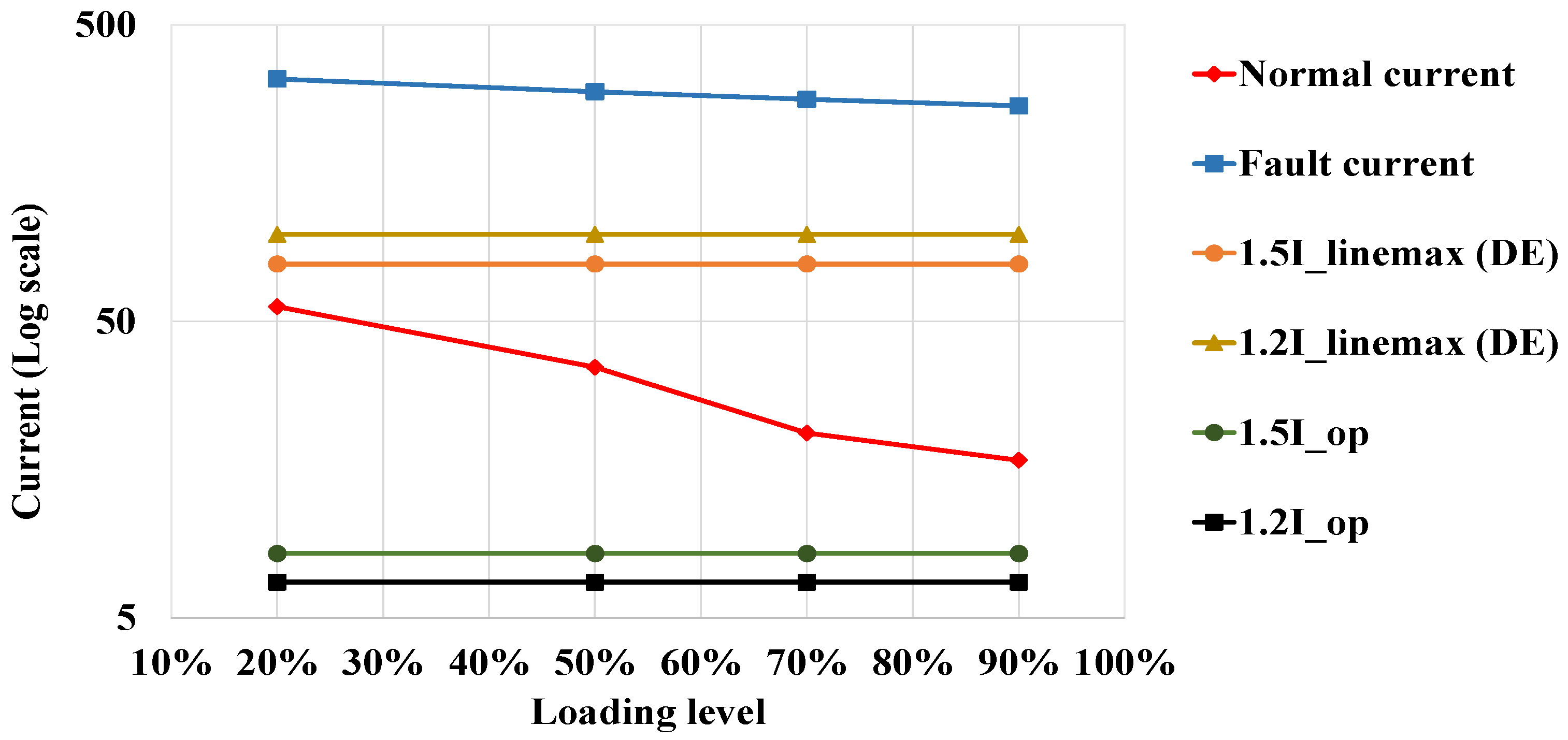
3.3.2. Fault Occurs under Different Load Conditions
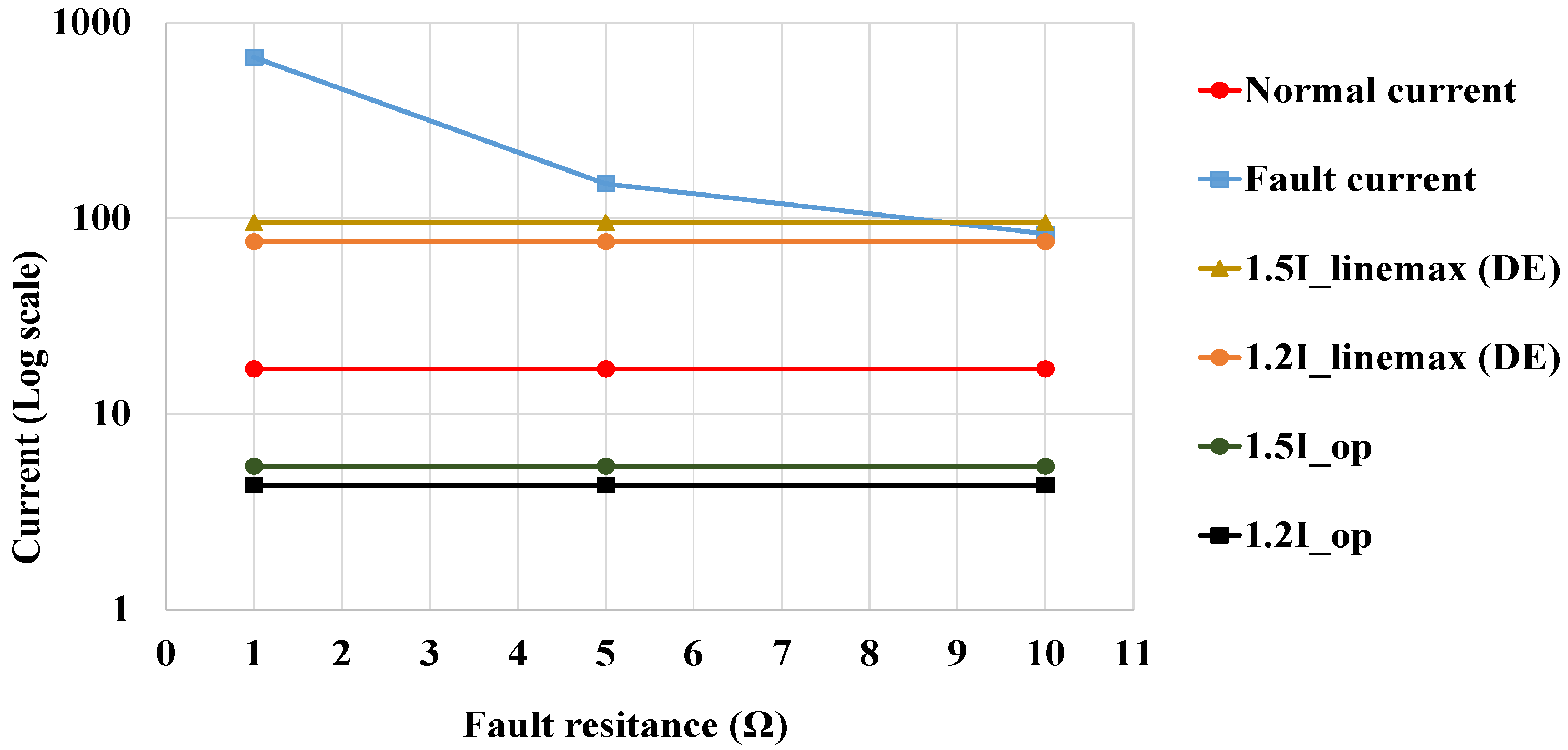
3.3.3. Fault with Different Resistances Occurs at Certain Load Condition
3.4. Seven-Bus Mesh System
3.4.1. Fault Occurs at Different Locations of Transmission Line
3.4.2. Fault Occurs under Different Load Conditions
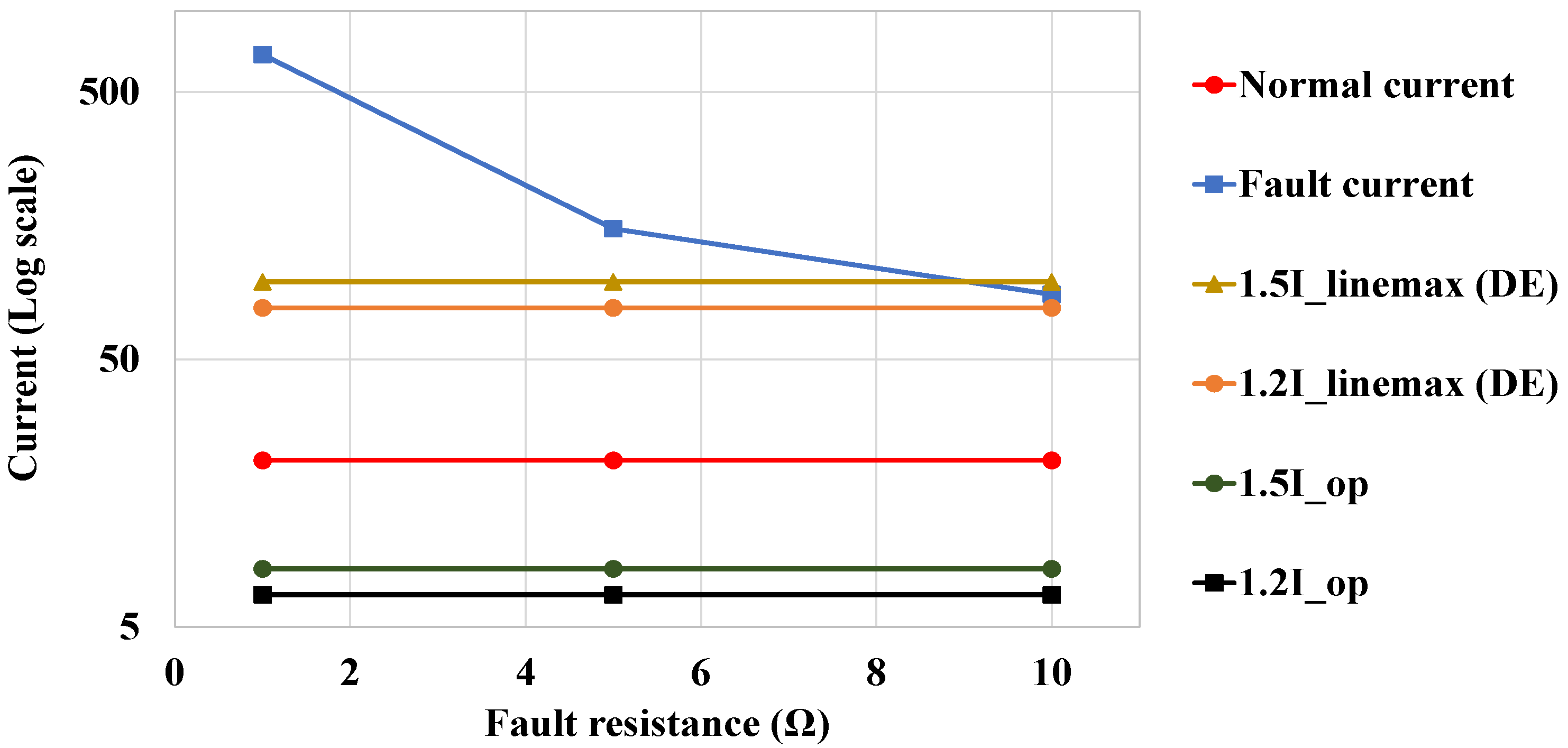
3.4.3. Fault with Different Resistances Occurs at Certain Load Condition
3.5. Discussion
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Kakigano, H.; Miura, Y.; Ise, T. Low-Voltage Bipolar-Type DC Microgrid for Super High Quality Distribution. IEEE Trans. Power Electron. 2010, 25, 3066–3075. [Google Scholar] [CrossRef]
- Salomonsson, D.; Soder, L.; Sannino, A. Protection of Low-Voltage DC Microgrids. IEEE Trans. Power Deliv. 2009, 24, 1045–1053. [Google Scholar] [CrossRef]
- Hooshyar, A.; Iravani, R. Microgrid Protection. Proc. IEEE 2017, 105, 1332–1353. [Google Scholar] [CrossRef]
- Tang, X.; Zhang, D.; Chai, H. Synthetical Optimal Design for Passive-Damped LCL Filters in Islanded AC Microgrid. J. Energy Power Technol. 2021, 3, 22. [Google Scholar] [CrossRef]
- Guerrero, J.M.; Loh, P.C.; Lee, T.; Chandorkar, M. Advanced Control Architectures for Intelligent Microgrids—Part II: Power Quality, Energy Storage, and AC/DC Microgrids. IEEE Trans. Ind. Electron. 2013, 60, 1263–1270. [Google Scholar] [CrossRef] [Green Version]
- Smith, M.; Ton, D. Key Connections: The U.S. Department of Energy’s Microgrid Initiative. IEEE Power Energy Mag. 2013, 11, 22–27. [Google Scholar] [CrossRef]
- Tostado-Véliz, M.; Arévalo, P.; Jurado, F. A comprehensive electrical-gas-hydrogen Microgrid model for energy management applications. Energy Convers. Manag. 2021, 228, 113726. [Google Scholar] [CrossRef]
- Faridpak, B.; Alahyari, A.; Farrokhifar, M.; Momeni, H. Toward Small Scale Renewable Energy Hub-Based Hybrid Fuel Stations: Appraising Structure and Scheduling. IEEE Trans. Transp. Electrif. 2020, 6, 267–277. [Google Scholar] [CrossRef]
- Lotfi, H.; Khodaei, A. AC Versus DC Microgrid Planning. IEEE Trans. Smart Grid 2017, 8, 296–304. [Google Scholar] [CrossRef]
- Cuzner, R.M.; Venkataramanan, G. The Status of DC Micro-Grid Protection. In Proceedings of the 2008 IEEE Industry Applications Society Annual Meeting, Edmonton, AB, Canada, 5–9 October 2008; pp. 1–8. [Google Scholar]
- Nasirian, V.; Moayedi, S.; Davoudi, A.; Lewis, F.L. Distributed Cooperative Control of DC Microgrids. IEEE Trans. Power Electron. 2015, 30, 2288–2303. [Google Scholar] [CrossRef]
- Arunan, A.; Sirojan, T.; Ravishankar, J.; Ambikairajah, E. Real-Time Adaptive Differential Feature-Based Protection Scheme for Isolated Microgrids Using Edge Computing. IEEE Syst. J. 2021, 15, 1318–1328. [Google Scholar] [CrossRef]
- Fletcher, S.D.A.; Norman, P.J.; Galloway, S.J.; Crolla, P.; Burt, G.M. Optimizing the Roles of Unit and Non-unit Protection Methods Within DC Microgrids. IEEE Trans. Smart Grid 2012, 3, 2079–2087. [Google Scholar] [CrossRef] [Green Version]
- Yuan, C.; Haj-ahmed, M.A.; Illindala, M.S. Protection Strategies for Medium-Voltage Direct-Current Microgrid at a Remote Area Mine Site. IEEE Trans. Ind. Appl. 2015, 51, 2846–2853. [Google Scholar] [CrossRef]
- Mohanty, R.; Pradhan, A.K. DC Ring Bus Microgrid Protection Using the Oscillation Frequency and Transient Power. IEEE Syst. J. 2019, 13, 875–884. [Google Scholar] [CrossRef]
- Beheshtaein, S.; Cuzner, R.M.; Forouzesh, M.; Savaghebi, M.; Guerrero, J.M. DC Microgrid Protection: A Comprehensive Review. IEEE J. Emerg. Sel. Top. Power Electron. 2019, 1. [Google Scholar] [CrossRef]
- Kumar, D.; Zare, F.; Ghosh, A. DC Microgrid Technology: System Architectures, AC Grid Interfaces, Grounding Schemes, Power Quality, Communication Networks, Applications, and Standardizations Aspects. IEEE Access 2017, 5, 12230–12256. [Google Scholar] [CrossRef]
- Lu, S.; Ma, R.; Sirojan, T.; Phung, B.; Zhang, D. Lightweight transfer nets and adversarial data augmentation for photovoltaic series arc fault detection with limited fault data. Int. J. Electr. Power Energy Syst. 2021, 130, 107035. [Google Scholar] [CrossRef]
- Taher, A.M.; Hasanien, H.M.; Ginidi, A.R.; Taha, A.T. Hierarchical Model Predictive Control for Performance Enhancement of Autonomous Microgrids. Ain Shams Eng. J. 2021, 12, 1867–1881. [Google Scholar] [CrossRef]
- Lopez-Garcia, T.B.; Coronado-Mendoza, A.; Domínguez-Navarro, J.A. Artificial neural networks in microgrids: A review. Eng. Appl. Artif. Intell. 2020, 95, 103894. [Google Scholar] [CrossRef]
- Alavi, S.A.; Mehran, K.; Vahidinasab, V.; Catalão, J.P.S. Forecast Based Consensus Control for DC Microgrids Using Distributed Long Short-Term Memory Deep Learning Models. IEEE Trans. Smart Grid 2021, 1. [Google Scholar] [CrossRef]
- Peña-Aguirre, J.C.; Barranco-Gutiérrez, A.I.; Padilla-Medina, J.A.; Espinosa-Calderon, A.; Pérez-Pinal, F.J. Fuzzy Logic Power Management Strategy for a Residential DC-Microgrid. IEEE Access 2020, 8, 116733–116743. [Google Scholar] [CrossRef]
- Mohanty, R.; Pradhan, A.K. Protection of Smart DC Microgrid With Ring Configuration Using Parameter Estimation Approach. IEEE Trans. Smart Grid 2018, 9, 6328–6337. [Google Scholar] [CrossRef]
- Meghwani, A.; Gokaraju, R.; Srivastava, S.C.; Chakrabarti, S. Local Measurements-Based Backup Protection for DC Microgrids Using Sequential Analyzing Technique. IEEE Syst. J. 2020, 14, 1159–1170. [Google Scholar] [CrossRef]
- Yang, J.; Fletcher, J.E.; O’Reilly, J. Short-Circuit and Ground Fault Analyses and Location in VSC-Based DC Network Cables. IEEE Trans. Ind. Electron. 2012, 59, 3827–3837. [Google Scholar] [CrossRef] [Green Version]
- Cairoli, P.; Dougal, R.A. Fault Detection and Isolation in Medium-Voltage DC Microgrids: Coordination Between Supply Power Converters and Bus Contactors. IEEE Trans. Power Electron. 2018, 33, 4535–4546. [Google Scholar] [CrossRef]
- Jia, K.; Wang, C.; Bi, T.; Feng, T.; Zhu, R. Transient Current Correlation Based Protection for DC Distribution System. IEEE Trans. Ind. Electron. 2020, 67, 9927–9936. [Google Scholar] [CrossRef]
- Shabani, A.; Mazlumi, K. Evaluation of a Communication-Assisted Overcurrent Protection Scheme for Photovoltaic-Based DC Microgrid. IEEE Trans. Smart Grid 2020, 11, 429–439. [Google Scholar] [CrossRef]
- Park, J.; Candelaria, J.; Ma, L.; Dunn, K. DC Ring-Bus Microgrid Fault Protection and Identification of Fault Location. IEEE Trans. Power Deliv. 2013, 28, 2574–2584. [Google Scholar] [CrossRef]
- Fletcher, S.D.A.; Norman, P.J.; Fong, K.; Galloway, S.J.; Burt, G.M. High-Speed Differential Protection for Smart DC Distribution Systems. IEEE Trans. Smart Grid 2014, 5, 2610–2617. [Google Scholar] [CrossRef] [Green Version]
- Ara, R.; Khan, U.A.; Bhatti, A.I.; Lee, B.W. A Reliable Protection Scheme for Fast DC Fault Clearance in a VSC-Based Meshed MTDC Grid. IEEE Access 2020, 8, 88188–88199. [Google Scholar] [CrossRef]
- Reis, M. Optimization of dc feeder rate of rise overcurrent protection settings using delta i cumulative distribution. In Proceedings of the Conference, 2004 IEEE Industrial and Commercial Power Systems Technical, Clearwater Beach, FL, USA, 1–6 May 2004; pp. 63–66. [Google Scholar]
- Augustine, S.; Reno, M.J.; Brahma, S.M.; Lavrova, O. Fault Current Control and Protection in a Standalone DC Microgrid Using Adaptive Droop and Current Derivative. IEEE J. Emerg. Sel. Top. Power Electron. 2020, 9, 2529–2539. [Google Scholar] [CrossRef]
- Emhemed, A.A.S.; Burt, G.M. An Advanced Protection Scheme for Enabling an LVDC Last Mile Distribution Network. IEEE Trans. Smart Grid 2014, 5, 2602–2609. [Google Scholar] [CrossRef] [Green Version]
- Emhemed, A.A.S.; Fong, K.; Fletcher, S.; Burt, G.M. Validation of Fast and Selective Protection Scheme for an LVDC Distribution Network. IEEE Trans. Power Deliv. 2017, 32, 1432–1440. [Google Scholar] [CrossRef] [Green Version]
- Baran, M.E.; Mahajan, N.R. Overcurrent Protection on Voltage-Source-Converter-Based Multiterminal DC Distribution Systems. IEEE Trans. Power Deliv. 2007, 22, 406–412. [Google Scholar] [CrossRef]
- Dragičević, T.; Lu, X.; Vasquez, J.C.; Guerrero, J.M. DC Microgrids—Part II: A Review of Power Architectures, Applications, and Standardization Issues. IEEE Trans. Power Electron. 2016, 31, 3528–3549. [Google Scholar] [CrossRef] [Green Version]
- Dallago, E.; Liberale, A.; Miotti, D.; Venchi, G. Direct MPPT Algorithm for PV Sources with Only Voltage Measurements. IEEE Trans. Power Electron. 2015, 30, 6742–6750. [Google Scholar] [CrossRef]
- Moirangthem, J.; Krishnanand, K.R.; Dash, S.S.; Ramaswami, R. Adaptive differential evolution algorithm for solving non-linear coordination problem of directional overcurrent relays. IET Gener. Transm. Distrib. 2013, 7, 329–336. [Google Scholar] [CrossRef]
- Das, S.; Suganthan, P.N. Differential Evolution: A Survey of the State-of-the-Art. IEEE Trans. Evol. Comput. 2011, 15, 4–31. [Google Scholar] [CrossRef]
- Fan, Q.; Yan, X. Self-Adaptive Differential Evolution Algorithm With Zoning Evolution of Control Parameters and Adaptive Mutation Strategies. IEEE Trans. Cybern. 2016, 46, 219–232. [Google Scholar] [CrossRef]
- Gao, Z.; Pan, Z.; Gao, J. A New Highly Efficient Differential Evolution Scheme and Its Application to Waveform Inversion. IEEE Geosci. Remote Sens. Lett. 2014, 11, 1702–1706. [Google Scholar]
- Qin, A.K.; Huang, V.L.; Suganthan, P.N. Differential Evolution Algorithm With Strategy Adaptation for Global Numerical Optimization. IEEE Trans. Evol. Comput. 2009, 13, 398–417. [Google Scholar] [CrossRef]
- Pan, Z.; Wu, J.; Gao, Z.; Gao, J. Adaptive Differential Evolution by Adjusting Subcomponent Crossover Rate for High-Dimensional Waveform Inversion. IEEE Geosci. Remote Sens. Lett. 2015, 12, 1327–1331. [Google Scholar]
- Mahat, P.; Chen, Z.; Bak-Jensen, B.; Bak, C.L. A Simple Adaptive Overcurrent Protection of Distribution Systems with Distributed Generation. IEEE Trans. Smart Grid 2011, 2, 428–437. [Google Scholar] [CrossRef]
- Meghwani, A.; Srivastava, S.C.; Chakrabarti, S. A Non-unit Protection Scheme for DC Microgrid Based on Local Measurements. IEEE Trans. Power Deliv. 2017, 32, 172–181. [Google Scholar] [CrossRef]
- Riccobono, A.; Liegmann, E.; Pau, M.; Ponci, F.; Monti, A. Online Parametric Identification of Power Impedances to Improve Stability and Accuracy of Power Hardware in the Loop Simulations. IEEE Trans. Instrum. Meas. 2017, 66, 2247–2257. [Google Scholar] [CrossRef] [Green Version]
- Kong, L.; Nian, H. Transient Modeling Method for Faulty DC Microgrid Considering Control Effect of DC/AC and DC/DC Converters. IEEE Access 2020, 8, 150759–150772. [Google Scholar] [CrossRef]
- Vygoder, M.; Milton, M.; Gudex, J.D.; Cuzner, R.M.; Benigni, A. A Hardware-in-the-Loop Platform for DC Protection. IEEE J. Emerg. Sel. Top. Power Electron. 2021, 9, 2605–2619. [Google Scholar] [CrossRef]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Name | Values |
|---|---|
| PV System MPP | 100 kW |
| Cable resistance | 0.9 kM |
| Bus voltage | 700 V |
| Cable inductance | 0.334 mH/kM |
| Series-connected modules per string in PV panel | 5 |
| Parallel strings in PV panel | 66 |
| Parameter per Module | Value | Parameter per Module | Value |
|---|---|---|---|
| Maximum power | 305.2 W | Cell per module | 96 |
| Voltage at MPP | 54.7 V | Current at MPP | 5.58 A |
| Short-circuit current | 5.96 A | Open circuit voltage | 64.2 V |
| Model Type | ||||||||
|---|---|---|---|---|---|---|---|---|
| Loading 1 | Loading 2 | |||||||
| Simplified Model | −63.7 | −63.7 | 63.7 | 63.7 | −59.3 | −59.3 | 34.8 | 84.1 |
| Complex Model | −63.3 | −63.3 | 63.5 | 63.5 | −58.5 | −58.5 | 34.5 | 83.5 |
| Error | ||||||||
| Model Type | ||||||||
|---|---|---|---|---|---|---|---|---|
| Loading 1 | Loading 2 | |||||||
| Simplified Model | 700 | 700 | 703 | 703 | 700 | 700 | 702 | 704 |
| Complex Model | 700 | 700 | 704 | 704 | 700 | 700 | 702 | 704 |
| Error | 0 | 0 | 0 | 0 | 0 | 0 | ||
| Systems | PV | PV | Bat | Bat | |
|---|---|---|---|---|---|
| Power | |||||
| Power | 100 kW | 100 kW | 100 kW | 100 kW | |
| Power | 10 kW | 10 kW | 10 kW | 10 kW | |
| Power | Power | Power | |
|---|---|---|---|
| Systems | |||
| PV = 1, 2, 3 | 100 kW | 10 kW | |
| Battery = 1, 2, 3 | 100 kW | 10 kW | |
| Pure Resistance Branch | 100 kW | 10 kW | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, M.; Zhang, D.; Lu, S.; Tang, X.; Phung, T. Differential Evolution-Based Overcurrent Protection for DC Microgrids. Energies 2021, 14, 5026. https://doi.org/10.3390/en14165026
Li M, Zhang D, Lu S, Tang X, Phung T. Differential Evolution-Based Overcurrent Protection for DC Microgrids. Energies. 2021; 14(16):5026. https://doi.org/10.3390/en14165026
Chicago/Turabian StyleLi, Miao, Daming Zhang, Shibo Lu, Xiuhui Tang, and Toan Phung. 2021. "Differential Evolution-Based Overcurrent Protection for DC Microgrids" Energies 14, no. 16: 5026. https://doi.org/10.3390/en14165026
APA StyleLi, M., Zhang, D., Lu, S., Tang, X., & Phung, T. (2021). Differential Evolution-Based Overcurrent Protection for DC Microgrids. Energies, 14(16), 5026. https://doi.org/10.3390/en14165026