1. Introduction
In the recent years, passivity theory has gained renewed attention because of its advantages and practicality in modelling of multi-domain systems and constructive control techniques. Starting with the classical theory of dissipative systems of [
1,
2], the idea of differential passivity based on the idea of variational systems was developed in [
3,
4]. The same authors extended in [
5] the idea to the incremental passivity concept. More recently, the idea of Krasovskii’s passivity was developed in [
6]. This approach is based on the construction of a storage function using Krasovskii’s method to design a Lyapunov candidate function for stability as in [
2]. Moreover, all these methods are useful for designing a simpler and more robust passivity-based controller (PBC).
However, a PBC manages to guarantee the closed-loop stability and reference tracking in terms of the command signal. But, in many cases, systems do not have the same physical significance and relevance for both input and output signals and, as such, an additional path planning procedure is necessary. For the purpose of this paper, we propose a robust controller to play this role, because robustness represents a major problem studied in Control Theory, with high impact in the literature, encompassing the sensitivity of a system with respect to both internal and external disturbances. The classical solutions for robust control problems uses
and
norms as a performance measure. The most common approaches to solve such problems are Algebraic Riccati Equations (AREs) [
7] and Algebraic Riccati Inequalities (ARIs) [
8]. In order to solve AREs in a more numerically stable manner, a solution using Popov triplets was presented in [
9]. An open-source implementation of the above method is presented in [
10], along with an iterative refinement described in [
11]. In order to overcome the limitations of the ARE-based solutions, consisting in the impossibility of solving singular problems, a Linear Matrix Inequality (LMI) based solution was developed in [
12]. For solving robust and nonlinear control problems using LMIs, an open-source implementation is described in [
13]. Moreover, an open-source toolbox for automatically modelling uncertainties as required in robust control problems using MATLAB is presented in the paper [
14].
Nowadays, renewable energy sources play an increasingly important role in the energy conversion, due to the negative consequences of the global warming. DC-DC converters have been found to be an adequate solution regarding renewable energy harvesting such as for sustaining prescribed voltages for high-power loads and for maximum power point tracking, as in [
15,
16,
17], or in DC microgrids, as in [
18]. An interior point method for renewable energy management was introduced in [
19], where the importance of the good performance in the DC-DC converters control is underlined. For modelling DC-DC converters, there are two major improvements: the averaging of ON and OFF state-space models from [
20], obtaining a nonlinear model, along with adding parasitic components in the circuit model, such as series and parallel resistors in the switching elements and passive components alike, as in [
21]. The average model greatly simplifies the computations and well approximates the physical switching system to a desired ripple tolerance, based on the PWM period. Using these ideas, a technique which adds a damping injection term to reach the passivity of the system was presented in [
22], and was extended for the nonideal DC-DC boost converter in [
23]. A Krasovskii passive proportional-integral (PI) type controller was designed for the ideal case of DC-DC converters in [
6].
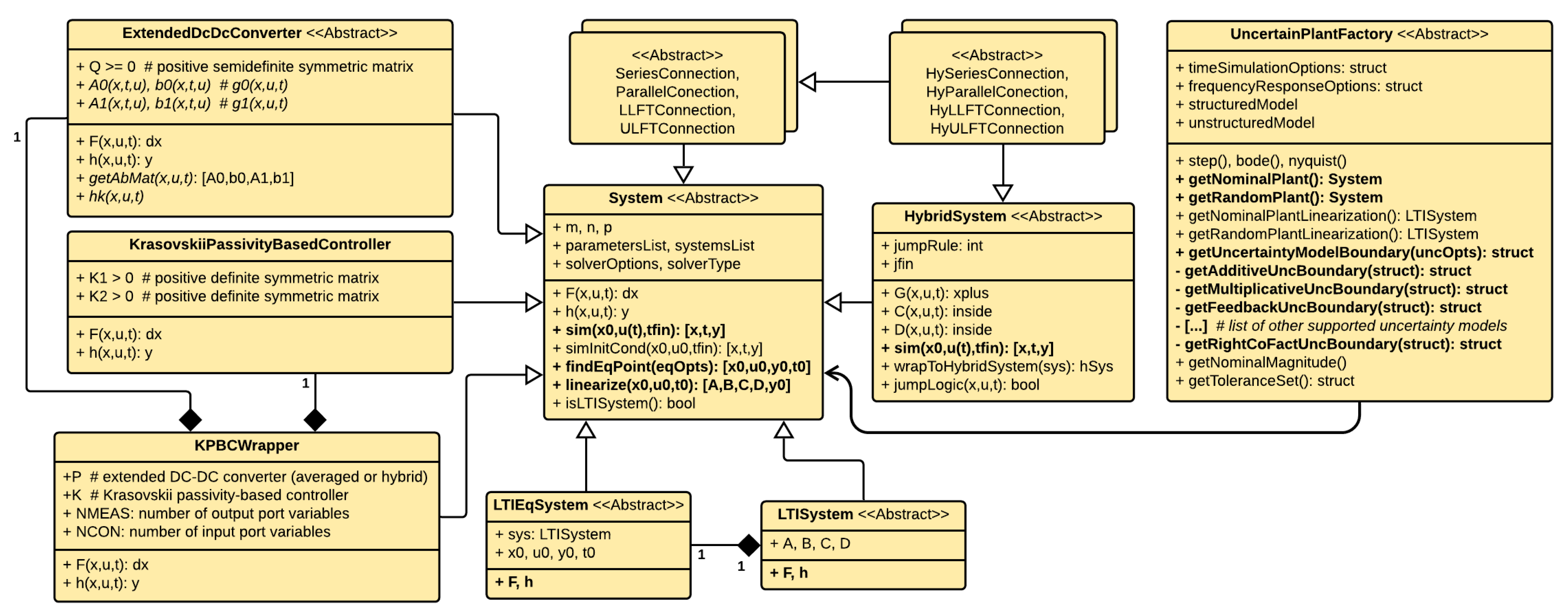
The main contributions of the current paper are: a mathematical framework for studying the property of quasi-linear input-affine nonlinear systems to be passive, a method to design a passivity-based controller for such a nonlinear systems, along with an entire software mechanism which manages to compute both PBC and robust controllers. First, we provide an extended set of sufficient conditions for a quasi-linear input-affine nonlinear system to be Krasovskii passive, along with a set of necessary and sufficient conditions for DC-DC buck, boost and single-ended primary inductor (SEPIC) converters to construct an output such that the systems are Krasovskii passive. These extended methods can be used even for nonideal converters, compared to the sufficient set of conditions presented in [
6]. Also, we present a method to design a Krasovskii passivity-based controller (K-PBC) which, along with the output port variable of the DC-DC converter, manages to ensure the closed-loop stability. This means that the lower linear fractional transformation between the system and the controller is asymptotically stable and manages to track any provided input trajectory. However, the input and the output signals are of different physical significance and, as such, an input trajectory path planning is needed in order to ensure a desired set of tracking performances. As a solution to this issue, we propose a robust controller designed for a linearized system around a forced equilibrium point. All these steps are included in an open-source toolbox which extends the initial iteration presented in [
14].
The paper follows the structure:
Section 2 describes the mathematical tools necessary for Krasovskii passivity analysis and Krasovskii passivity-based controller (K-PBC) design, along with a basic overview of Robust Control theory;
Section 3 gives an extended set of sufficient conditions for a quasi-linear input-affine nonlinear system to be Krasovskii passive and presents the proposed structure for the decentralized controller, along with relevant aspects and observations regarding the software implementation;
Section 4 presents the mathematical models of the nonideal DC-DC converters, the Krasovskii’s passivity analysis of these systems and the K-PBC design manner;
Section 5 provides comparative simulations of the obtained closed-loop system obtained by numerical simulation obtained using the proposed open-source toolbox;
Section 6 illustrates the conclusions, along with proposed improvements and future work completions.
Notation: For and , we denote by .
5. Numerical Results
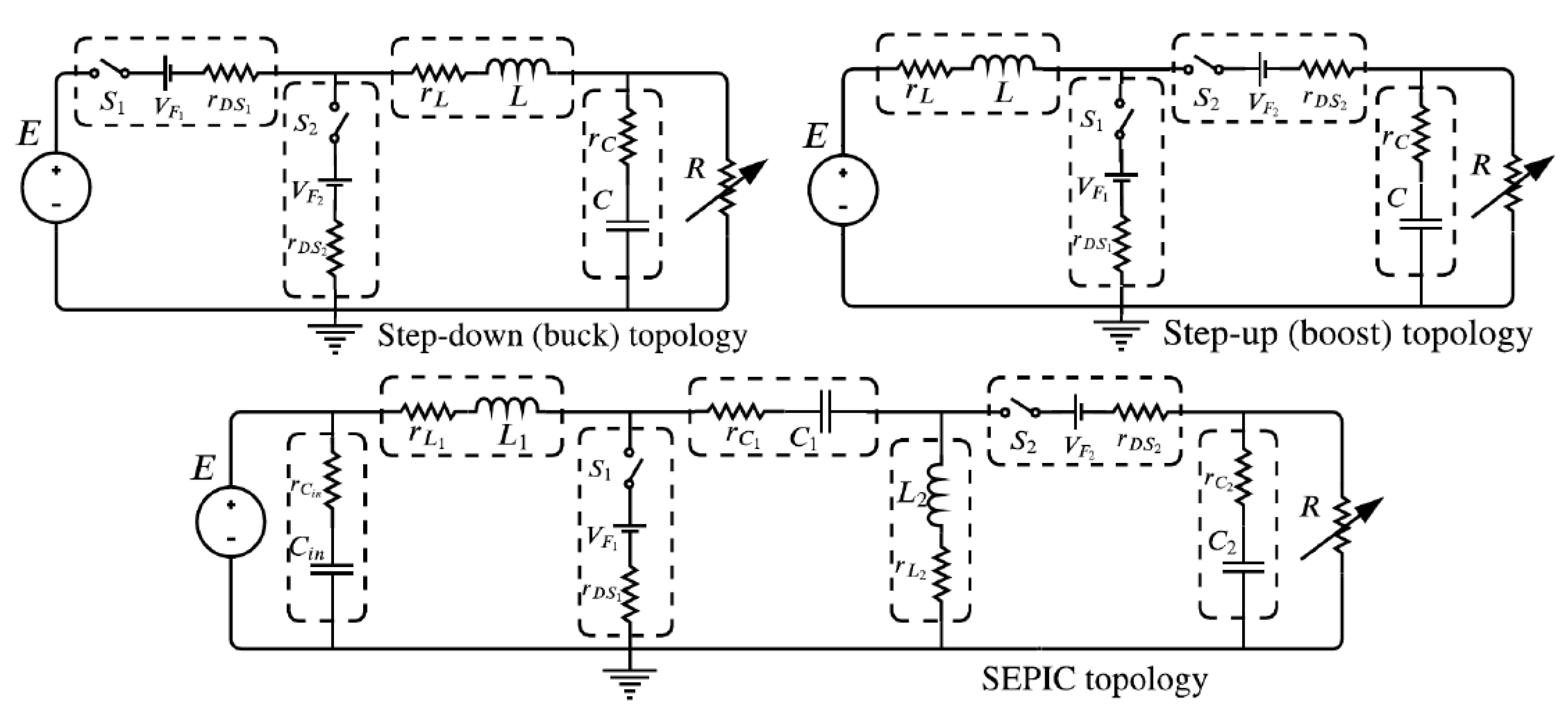
In this section we present detailed design and analysis steps of the proposed method and toolbox workflow only for the single-ended primary-inductor converter (SEPIC), for brevity. The nominal values of the SEPIC converter parameters used for this set of numerical simulations are presented in
Table 1, along with their tolerances.
Firstly, we proceed to obtain the robust controller used for path planning, using the methodology presented in [
14]. As such, we need to linearize the quasi-linear input-affine nonlinear system (
) from Equation (
57) according to Equation (
30). This high-power configuration of the converter is targeted for renewable energy sources, with the desired input/state/output operating specifications being: output voltage
[V], with a nominal external voltage source
[V] and load input resistance
. An initial guess for the state vector equilibrium point values was
, followed by
for the duty cycle command. Through numeric computation, the nominal nonlinear plant equilibrium point follows:
After calling the
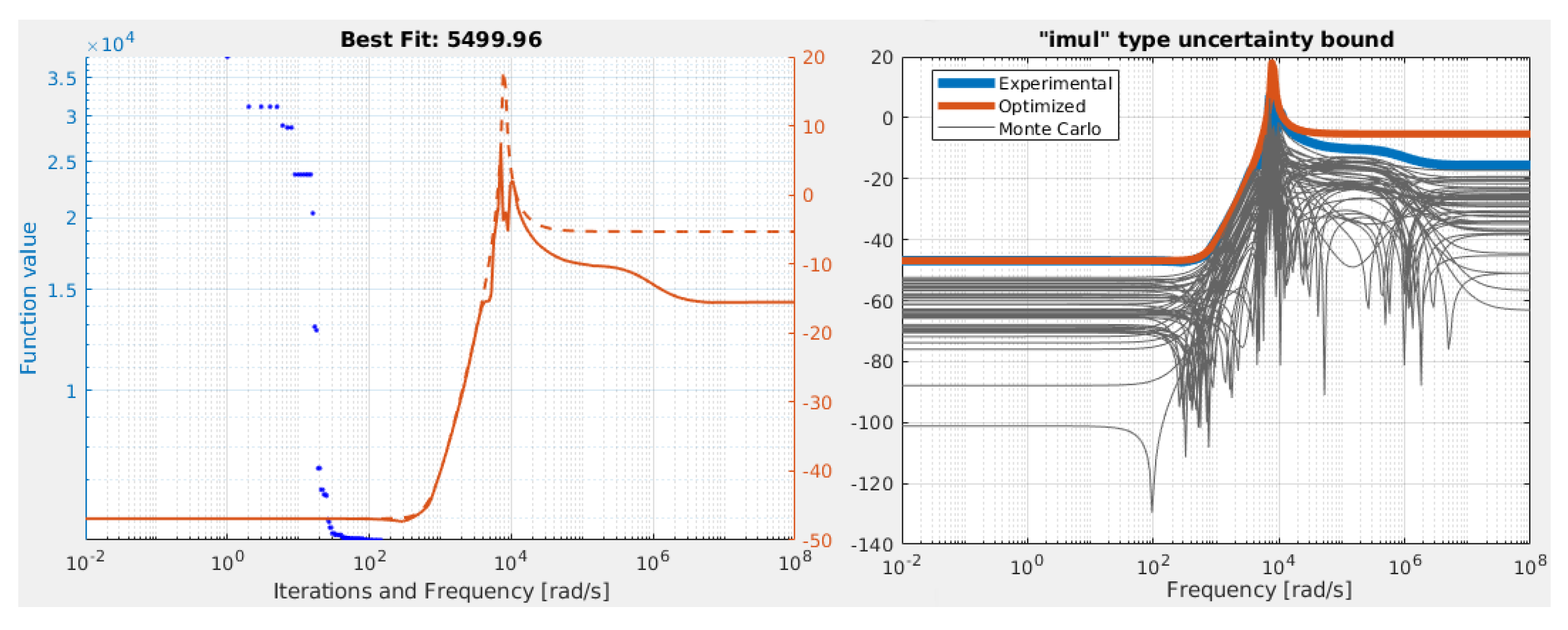
System.linearize() routine for the LTI plant model, the uncertainty model needs to be computed. For modelling the uncertainty of the electrical components and external influences, an input multiplicative model was considered, i.e.,
, with
. This model has been numerically computed in an automatic manner from the interface of input
to output
, with the additional tolerances
[V] and
, based on
Monte Carlo simulations. A comprehensive frequency range for this SEPIC configuration is
, with 300 equally distributed samples in logarithmic domain. For the particle swarm optimization algorithm used for computing the uncertainty bounds, a successful set of hyperparameters consists in the swarm size of 1500, initial swarm span of
, minimum neighbors fraction of
, and inertia range of
, for a complex pole and zero pair transfer function, resulting in:
This procedure and its validation is portrayed in
Figure 7.
In minimal form, the linearized SEPIC plant family is spanned by fourth-order stable and proper systems, with four zeros, three of which are of nonminimum phase, from the control path to the load resistor voltage output. The nominal MISO transfer matrix model from
to
is:
where
.
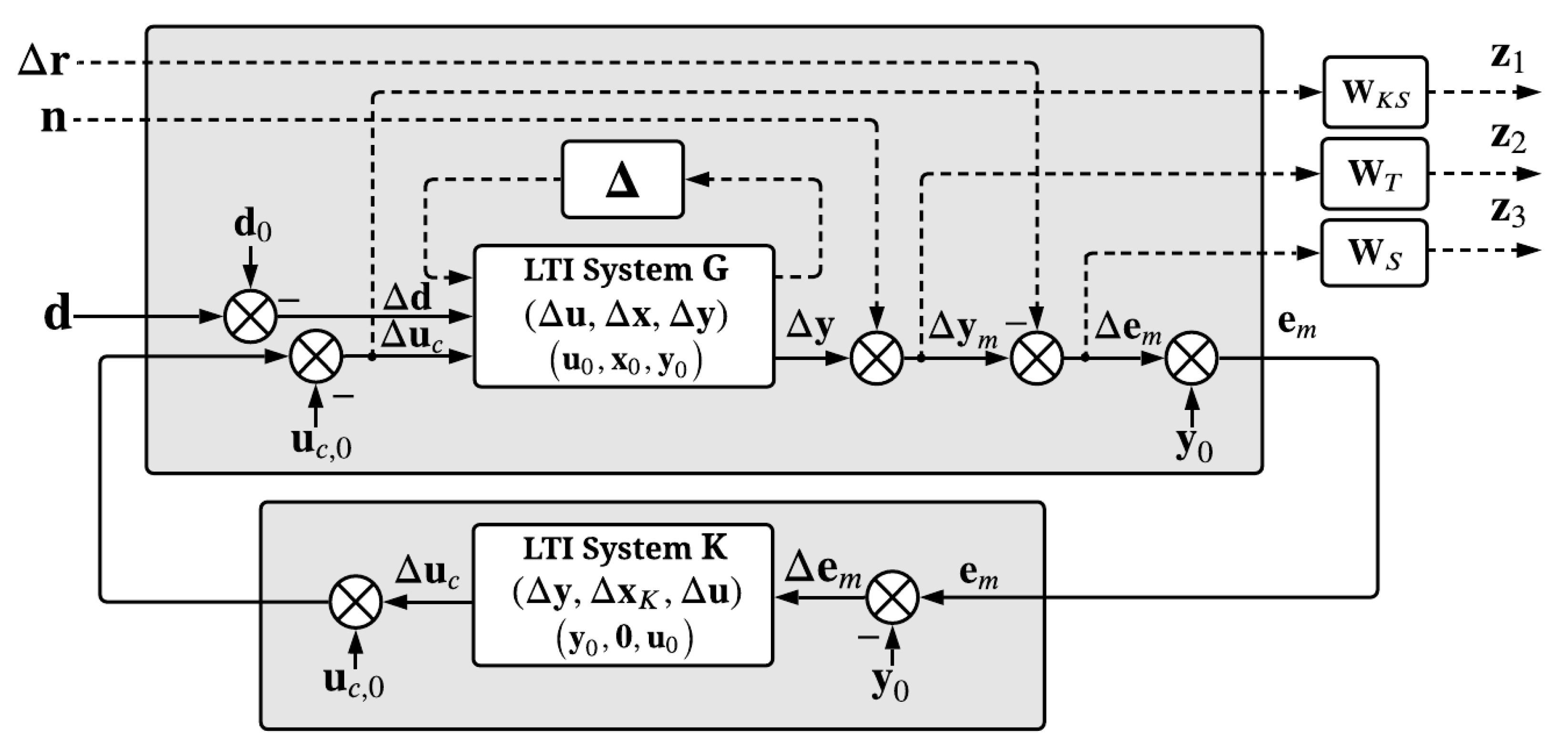
Besides the classical scope of obtaining good transient and steady-state responses, another main purpose for the controller synthesis was to penalize near-resonance control effort, as the obtained controllers would otherwise be difficult to implement in practice, requiring small sampling periods, i.e.,
[
s]. As such, the sensitivity, complementary sensitivity and control effort loop-shaping filters are:
with an imposed sensitivity bandwidth of at least
= 200 [rad/s], admissible steady-state error of maximum
, allowed sensitivity peak at
. Lower bandwidth was imposed for damping the frequency response resonance and, also, to move away from the physical limitations of the multiple nonminimum phase zeros. The complementary sensitivity bandwidth must be faster than
[rad/s], forcing a high frequency attenuation of at least
with a roll-off order
, with an allowed peak of
. The dynamic control effort weighting function imposes all frequencies with magnitude less than 1, with a further penalization of maximum
above
[rad/s], due to the resonant peak centered at
[rad/s].
From the direct application of the
-synthesis procedure for the augmented plant with uncertainties, a controller of order
is obtained. This procedure is followed by a balanced order reduction operation, with the smallest-order controller which manages to ensure all imposed performance specifications, with a peak value
, being of order
:
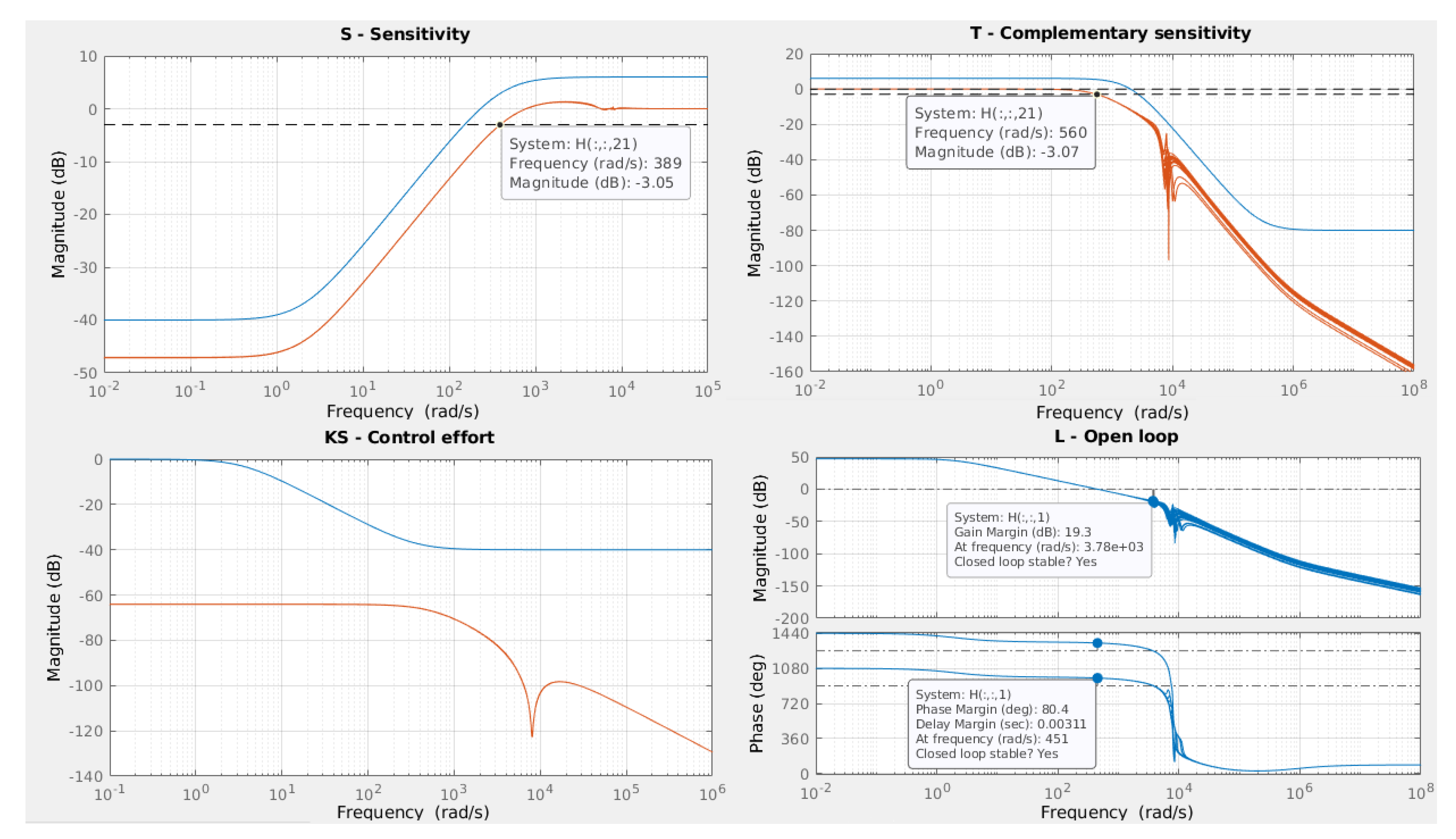
The robust path-planning design of the weighting filters, along with frequency response closed-loop performance plots with the reduced-order controller for the uncertain SEPIC converter plant set are illustrated in
Figure 8 and
Figure 9. The closed-loop control system presents itself with large stability margins, with a phase margin
and gain margin of
19 [dB]. Additionally, as specified by the parameters
and
of
, the closed-loop control system practically nullifies stochastic sensor noise signals spanning from
[rad/s], using an initial roll-off of
[dB/dec], followed by an attenuation of at least four orders of magnitude. In practice, the attenuation continues with a further
[dB/dec] roll-off afterwards.
From the frequency response of
Figure 8, the bandwidth is measured at
[rad/s], resulting in an equivalent rise time less than
2.5 [ms], with a negligible steady-state error
10
[V], where
represents the steady-state value, relative to the desired equilibrium output
[V]. Additionally, the system presents no overshoot in the vicinity of the operating point, as it was designed to behave similar to a first-order low-pass filter.
The SEPIC converter is a highly-nonlinear plant with respect to the command signal , and there are use cases where the operating point may be dynamic, along with being generally affected by a diverse set of perturbations. Besides the previously-mentioned advantages of the already designed robust controller, it will be used as an auxiliary path planning component along with the K-PBC controller used to guarantee asymptotic stability for the entire domain of operation for the converter.
In order to design the K-PBC controller, we need to construct the output port-variable
such that the SEPIC converter is Krasovskii passive. The LMI problem presented in Claim 3, having the bounds of the load resistance
, has been solved using the method described in [
13], with a possible solution from the feasibility cone:
from which the output port-variable have the form presented in Claim 3, as well.
After this extra output is designed, the K-PBC having the form:
having two inputs: the output port-variable
of the extended
and the desired input trajectory
, while the output is the actual value of the duty-cycle
. The parameters of the controller (Equation (
70)) are
and
.
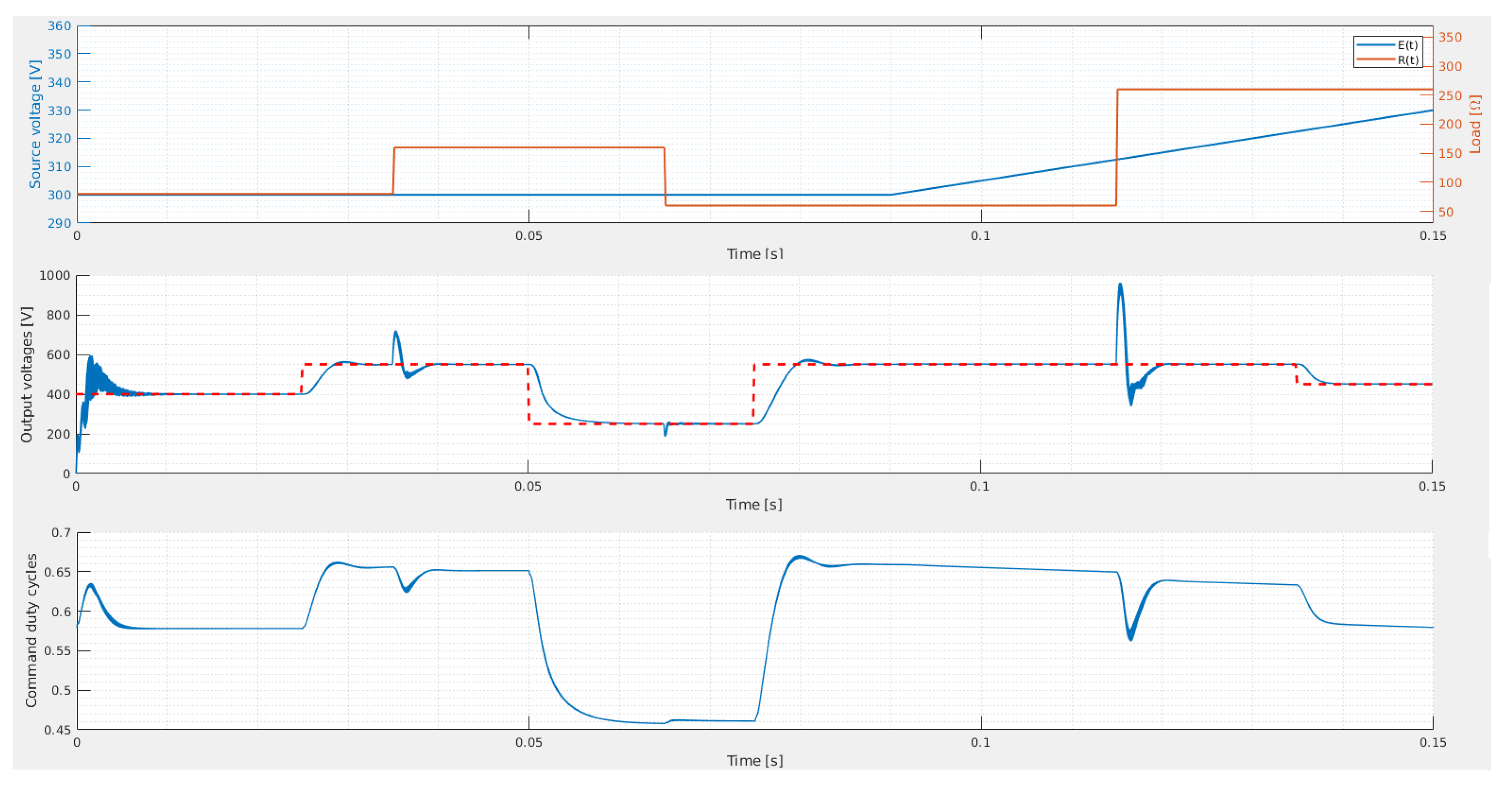
Figure 9 and
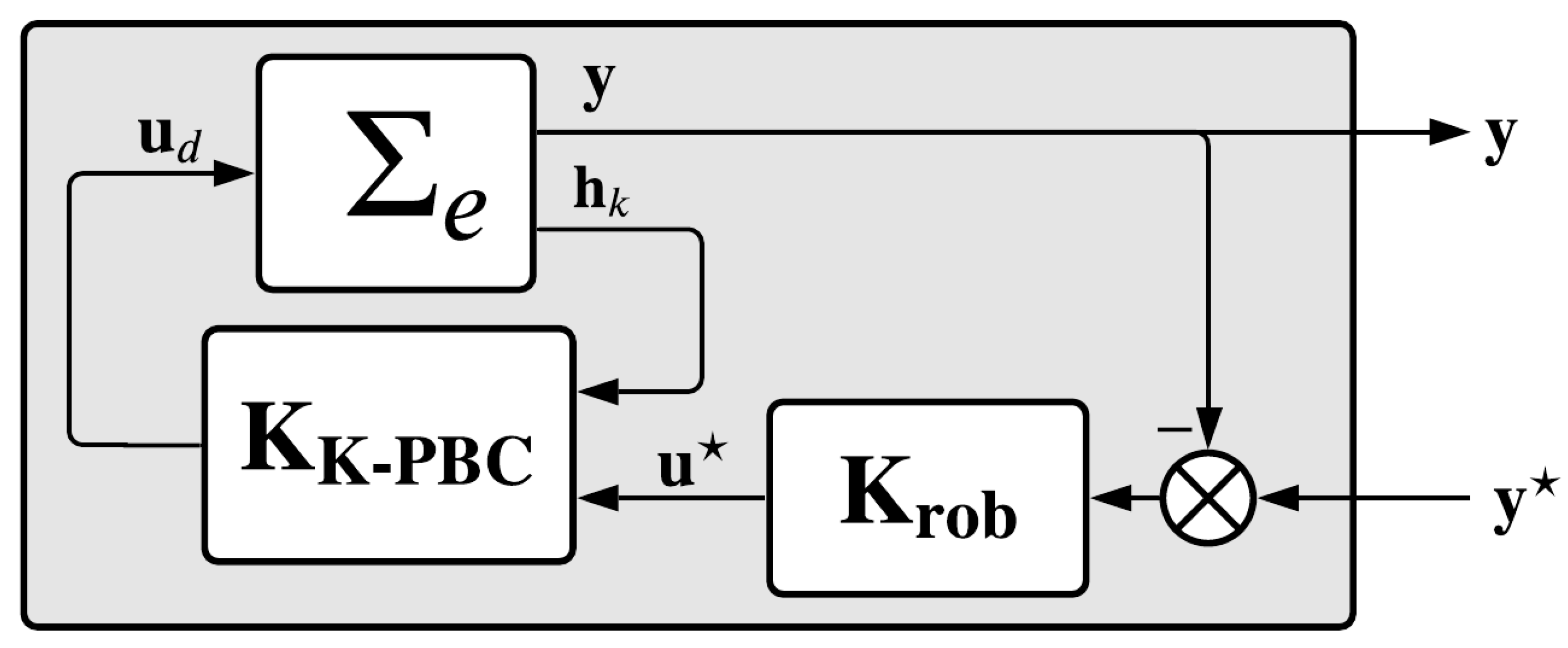
Figure 10 illustrate time domain simulations of the SEPIC converter in closed-loop configuration using the proposed control structure of cascaded K-PBC with
-synthesis path planning
at various operating points, as in
Figure 3, along with different types of disturbances applied, in comparison to using the same robust controller-only approach, using the structure from
Figure 4. The former compares the response of the proposed closed-loop system by comparison with the robust controller only counterpart, while the latter figure illustrates the robust stability and robust performance of the proposed method for a set of 50 Monte Carlo simulations sampled from the tolerance set of
Table 1.
Both experiments start from null initial conditions applied to all state variables, in order to emphasize the behaviour to sudden jumps in the dynamics, followed by a succession of disturbances applied at the converter inputs, such as:
a sequence of load resistance steps:
- -
from [] to [];
- -
from [] to [];
- -
from [] to [].
a ramp disturbance on the external source voltage from [V], starting at [s] with an increasing slope of 500 and saturated at 50 [V];
a sequence of output reference steps:
- -
from [V] to [V];
- -
from [V] to [V];
- -
from [V] to [V];
- -
from [V] to [V].
As noticeable in
Figure 9, the proposed method not only tracks the desired voltage reference at all operating points, but it also considerably improves transients caused by changes in the disturbance signals compared to using
only, such as for the moments
t = 0,
,
,
, with smaller overshoots and more damped oscillations. A small compromise is that it adds insignificant overshoots when reference changes occur, such as at time
. The steady-state performance is not affected by the addition of the K-PBC.
In addition to the previous results,
Figure 10 shows the robustness of the method when subjected to the parametric uncertainties inherent to the SEPIC converter circuit, in which all the dynamic and steady-state performance indicators remain fundamentally unchanged even after
variations of the circuit’s main component values.
6. Conclusions
The current paper presents a mathematical framework which allows to construct an output vector such that an input-affine nonlinear system is Krasovskii passive. Moreover, Theorem 3, which is a convex particularization of Theorem 1, without any dependency on the state variable , provides the set of necessary and sufficient conditions for a quasi-linear affine system to be Krasovskii passive in terms of LMIs. To illustrate the flexibility and usefulness of the method, as a case study, a unified treatment for DC-DC converters is presented. After this interface is set for such a system, a method to construct a K-PBC is presented. The LLFT interconnection between the nonlinear system and K-PBC ensures the asymptotic stability, which means that the closed-loop system manages to follow the given input trajectory. However, the input trajectory has the same physical significance as the input of the nonlinear system, which, in general, differs from that of the output. As such, another component, called path planner, is mandatory in order to obtained the desired tracking performance. The proposed method includes a dynamical path planning as a robust controller computed for the linearized plant around the desired equilibrium point by solving the mixed-sensitivity -synthesis loop-shaping problem. In brief, the decentralized controller manages to ensure the asymptotic stability due to the K-PBC component, while the robust controller manages to compute the input trajectory such that the closed-loop system fulfills the robust performance.
Although
Section 4 presents the possibility to compute the output port-variable such that various DC-DC converter topologies are Krasovskii passive, in
Section 5 we present the SEPIC converter as a case study, due to its highly-nonlinear behaviour. As shown in the previous section, there are some important improvements if we compare the results obtained with the proposed method against the results obtained with the robust controller only. Moreover, the robustness of the proposed method has been proved using Monte Carlo simulations in time domain.
In this paper we managed to develop the mathematical background, which was successfully implemented in a second version of our toolbox, initially presented in [
14]. However, in this current iteration we assume that all signals required for the output port-variable construction are available. But, in practice, an estimator will be necessary. As such, one possible extension for practical implementation could consist in (1) considering a high-gain observer for quasi-linear affine systems. Additionally, (2) there are three degrees of freedom for the K-PBC controller—the matrices
Q,
and
—which may also be introduced in the optimization problem when computing the robust controller. Finally, (3) the implementation of the proposed method on microcontroller units will be studied, by also taking into consideration quantization effects.
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}