
The Delay-Dependent DOFC for Damping Inter-Area Low-Frequency Oscillations in an Interconnected Power System Considering Packet Loss of Wide-Area Signals


Abstract
:1. Introduction
- An augmented closed-loop system model considering time-delay and packet loss of remote signals is set up to deal with inter-area oscillations.
- The sufficient conditions of exponentially mean-square stable for closed-loop power system with packet loss of remote signals are derived.
- The method to obtain parameters of DOFC is given.
- The relationship between delay margin and the packet loss rate is presented, and the effectiveness and advantage are verified by simulation results.
2. Control Problem Formulation
2.1. Modelling of Power System
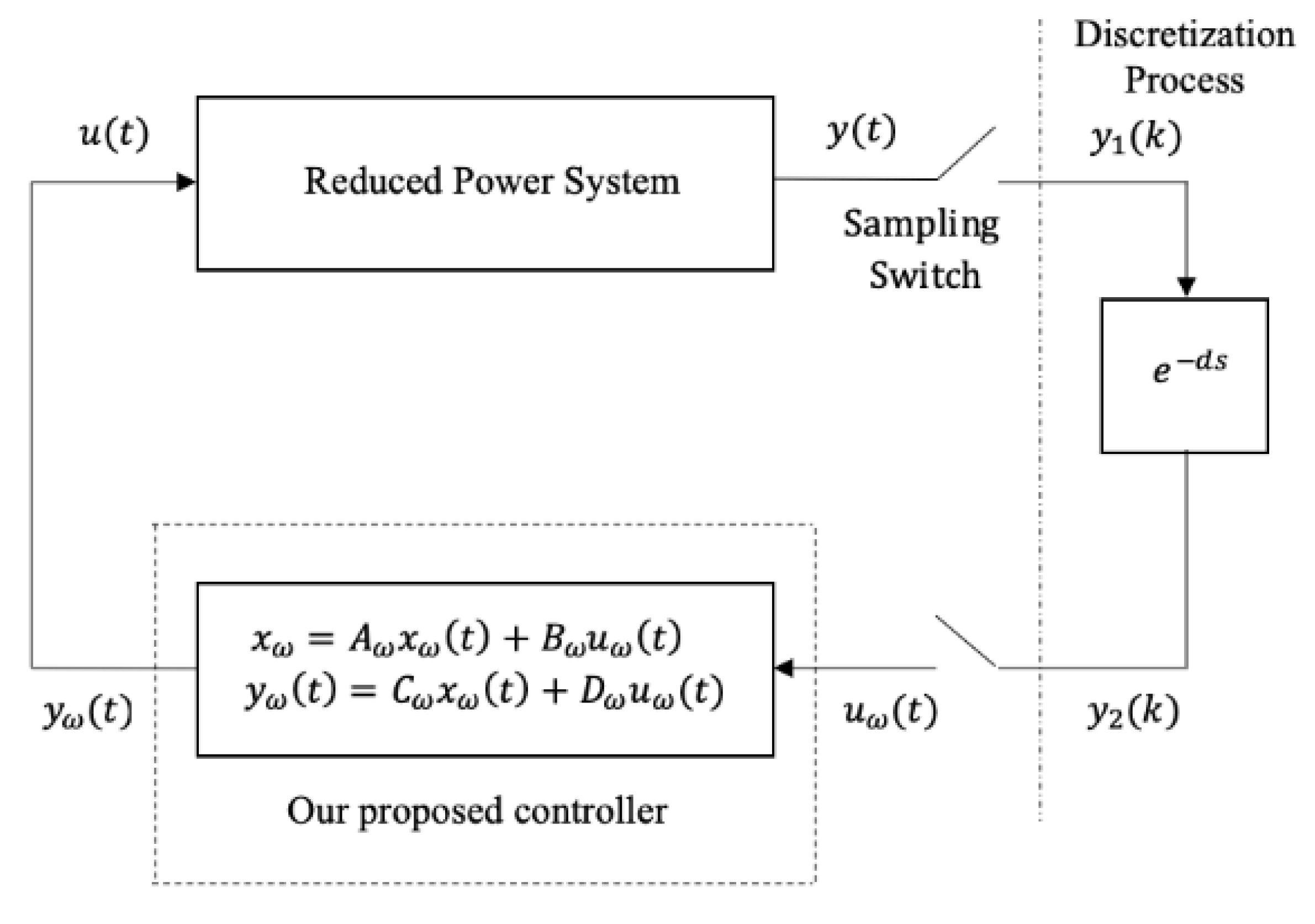
2.2. The Augmented Closed-Loop Power System
3. Main Results
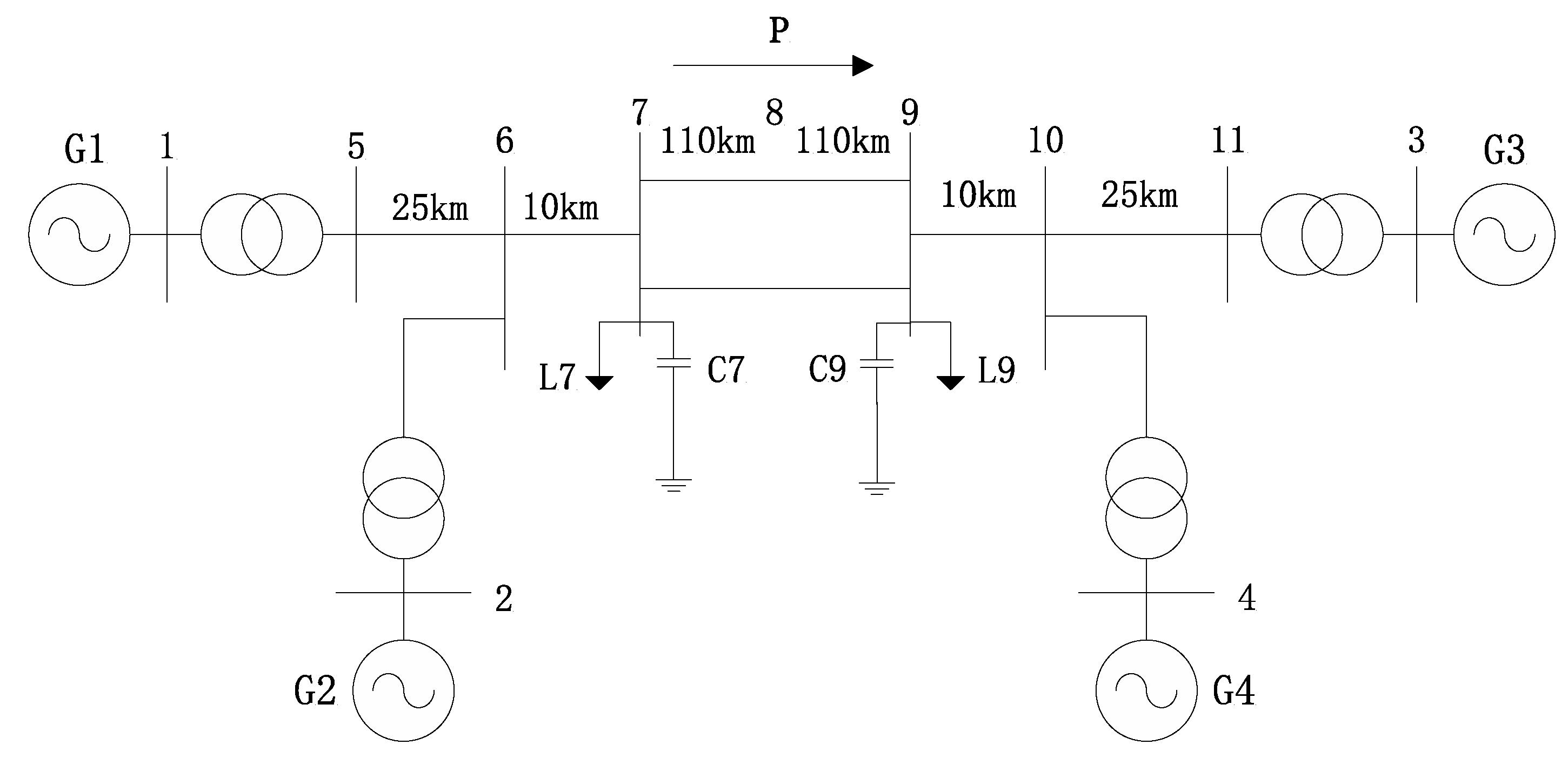
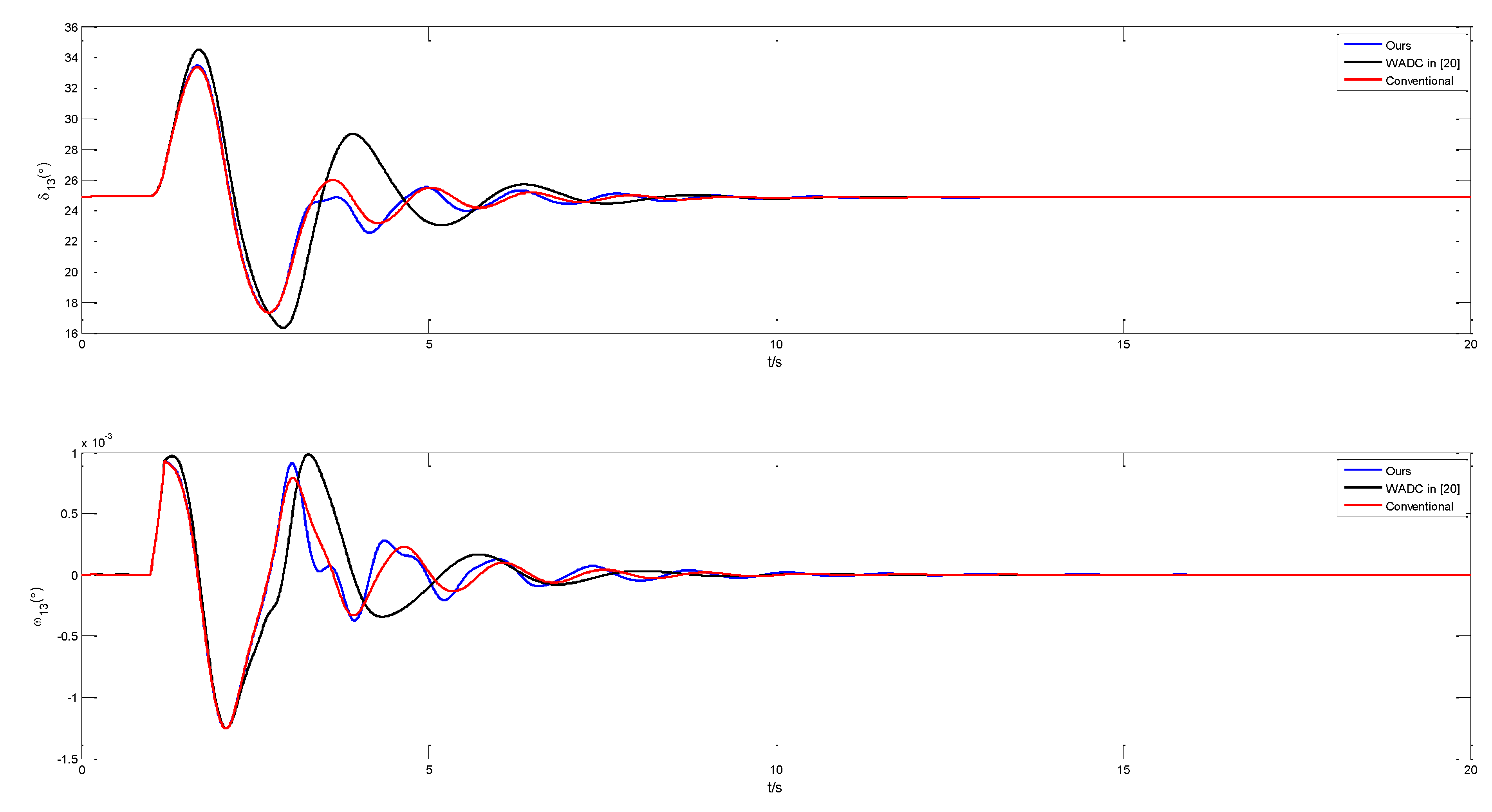
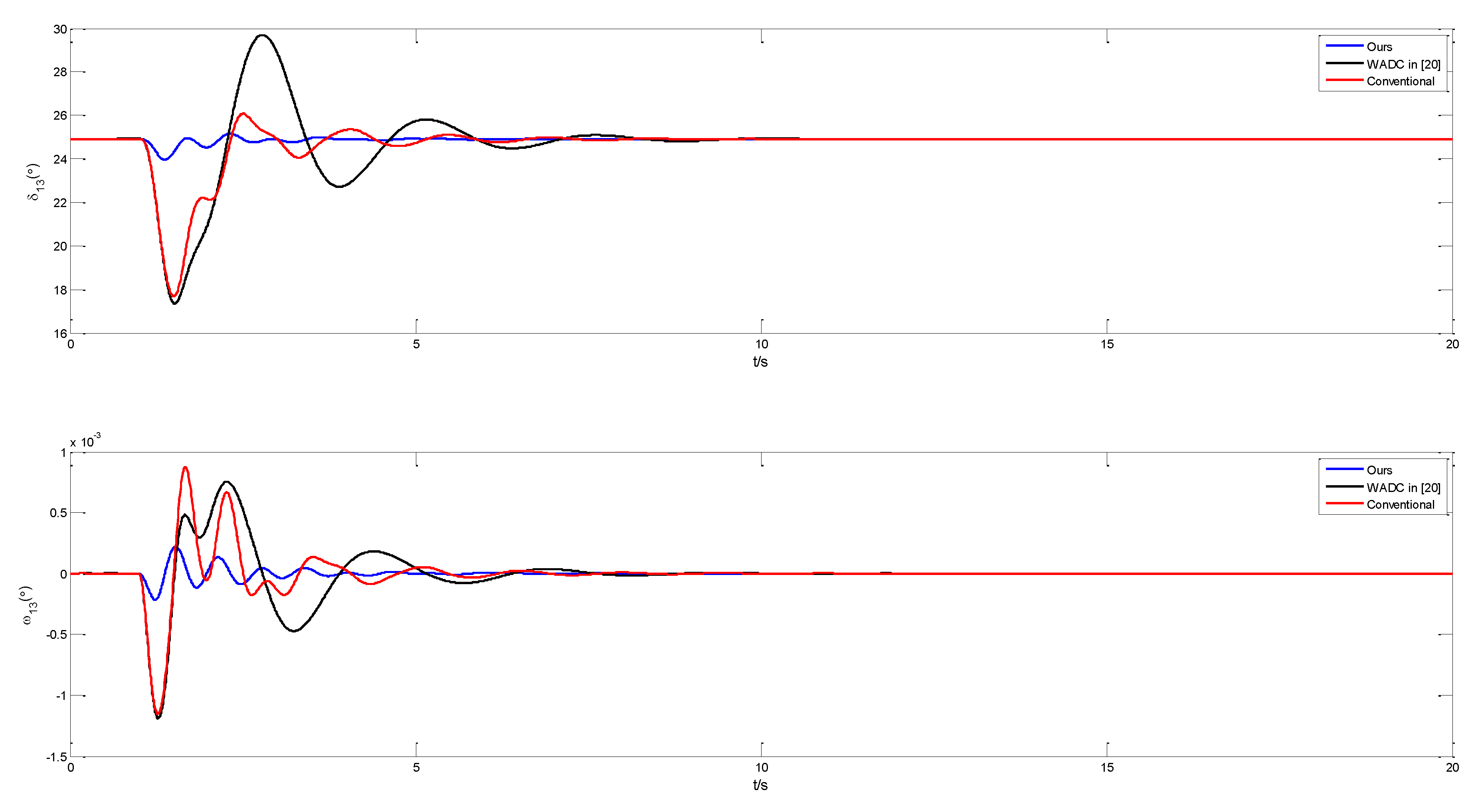
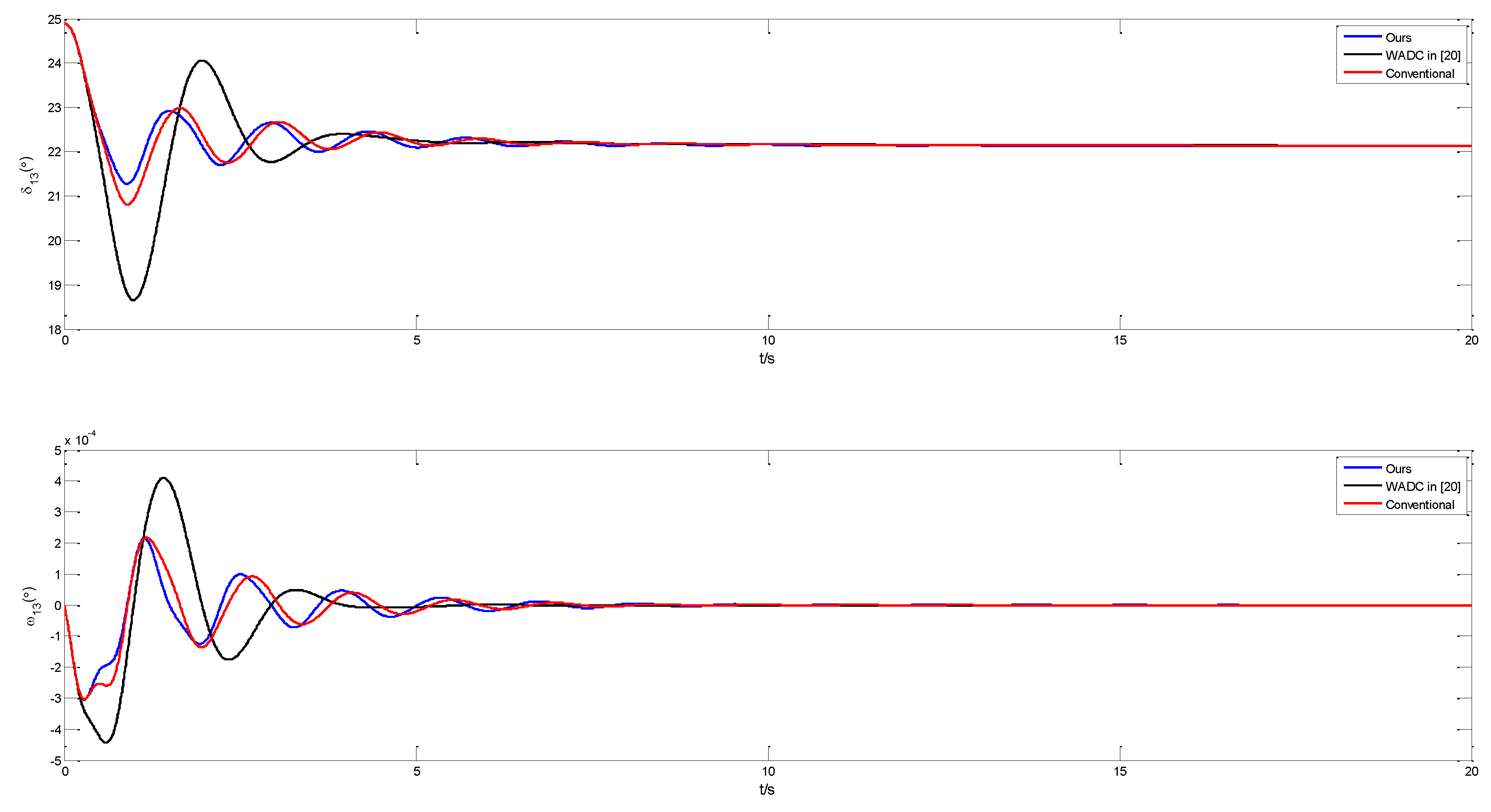
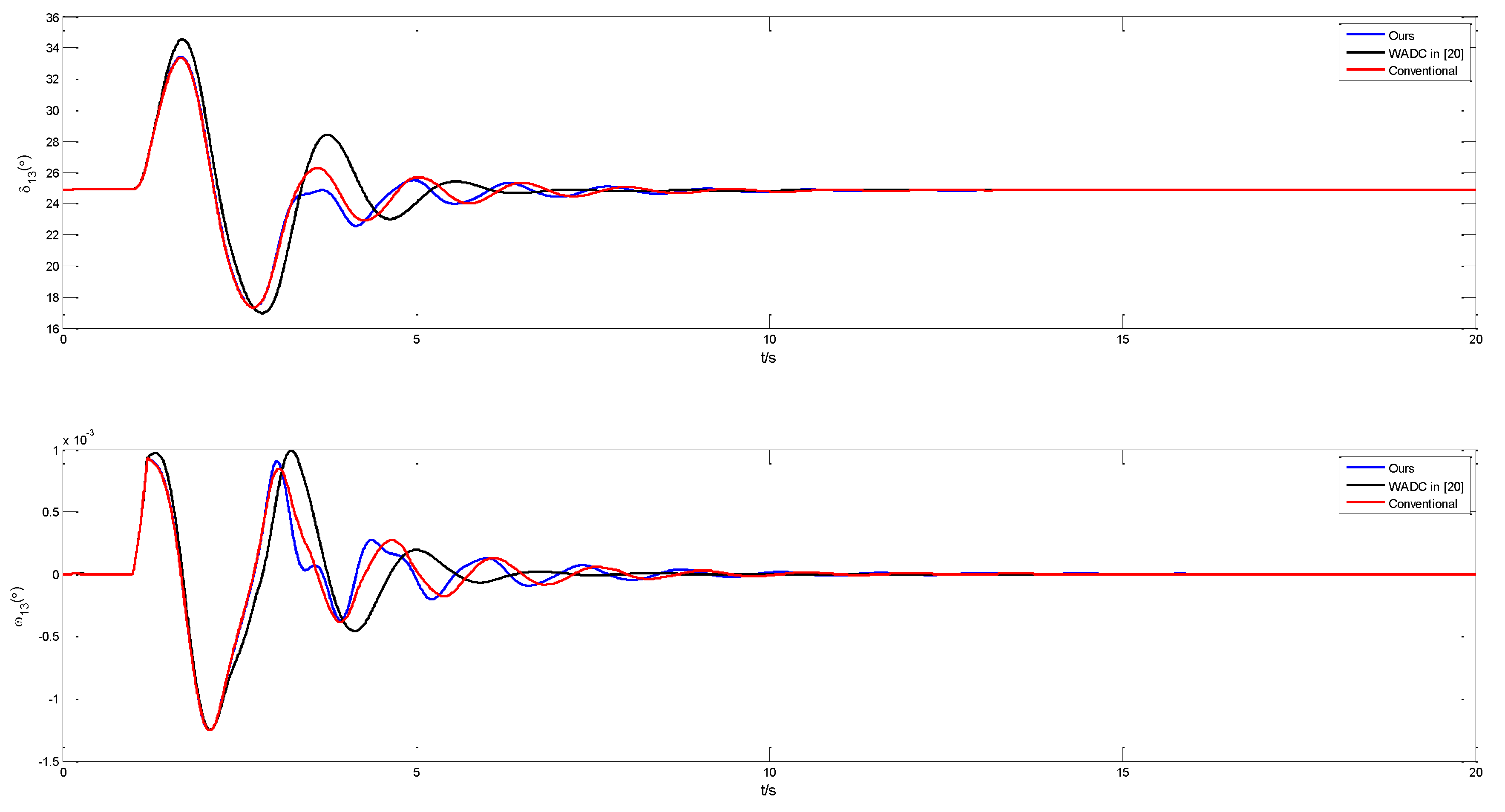
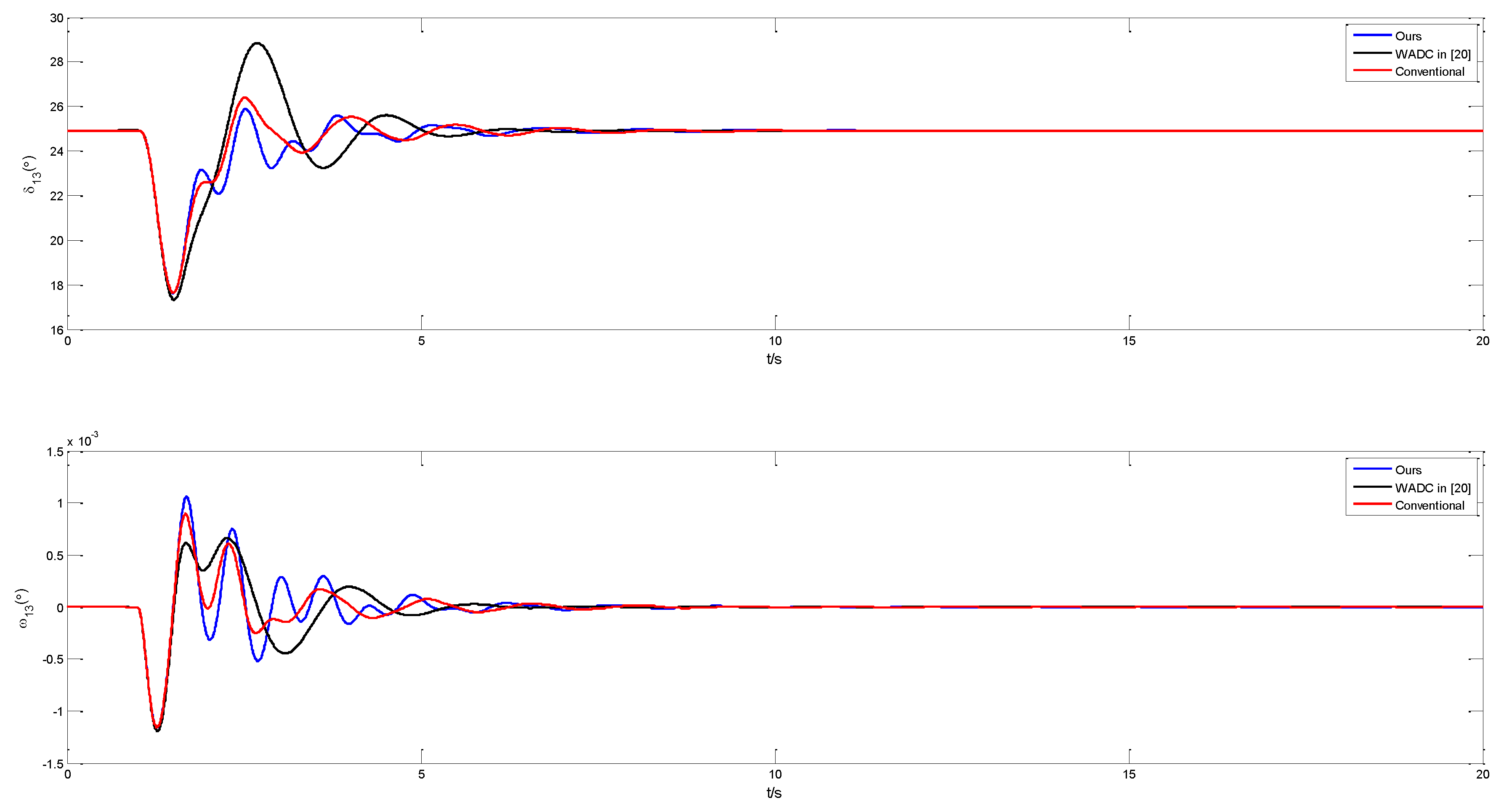
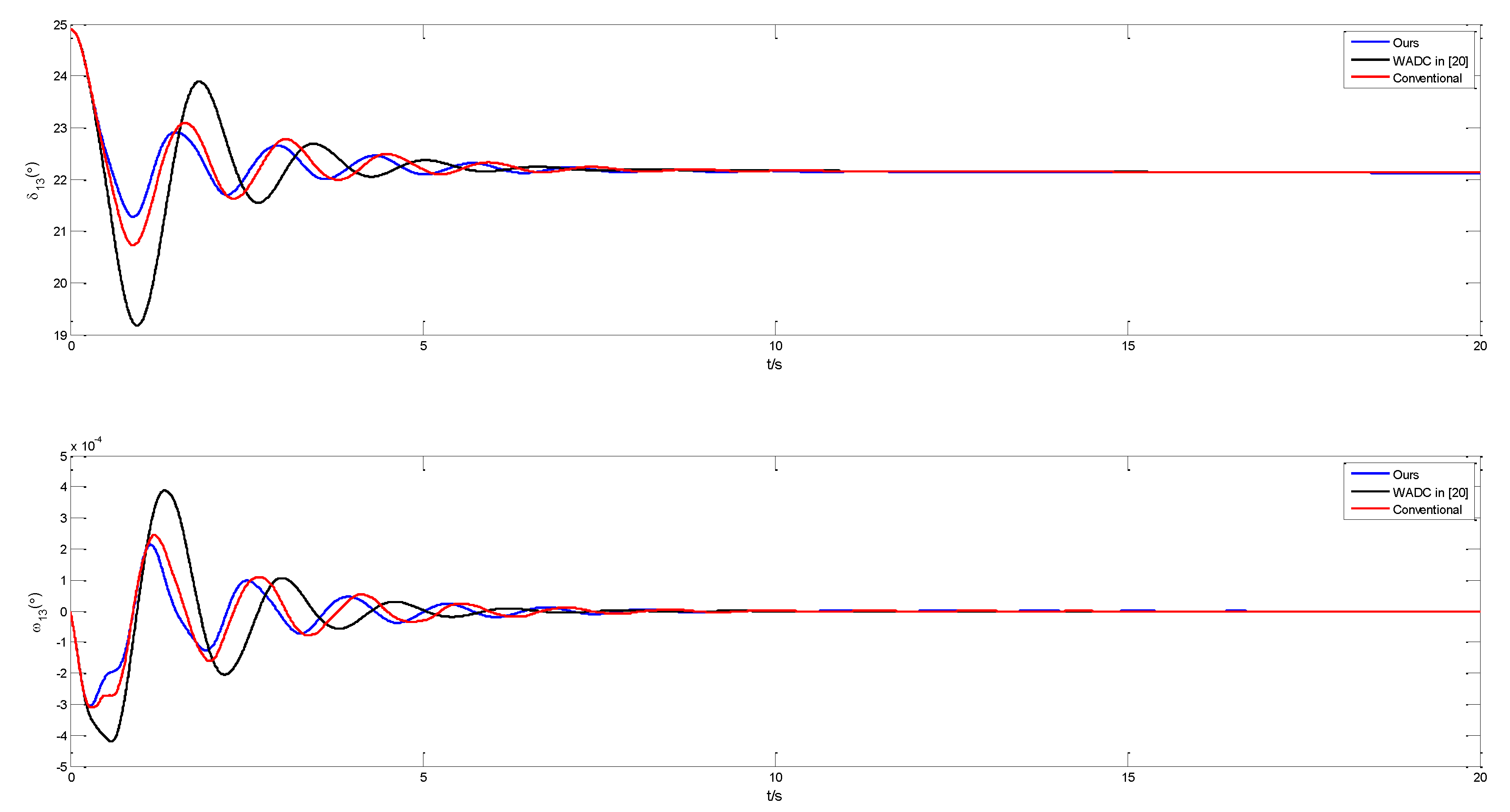
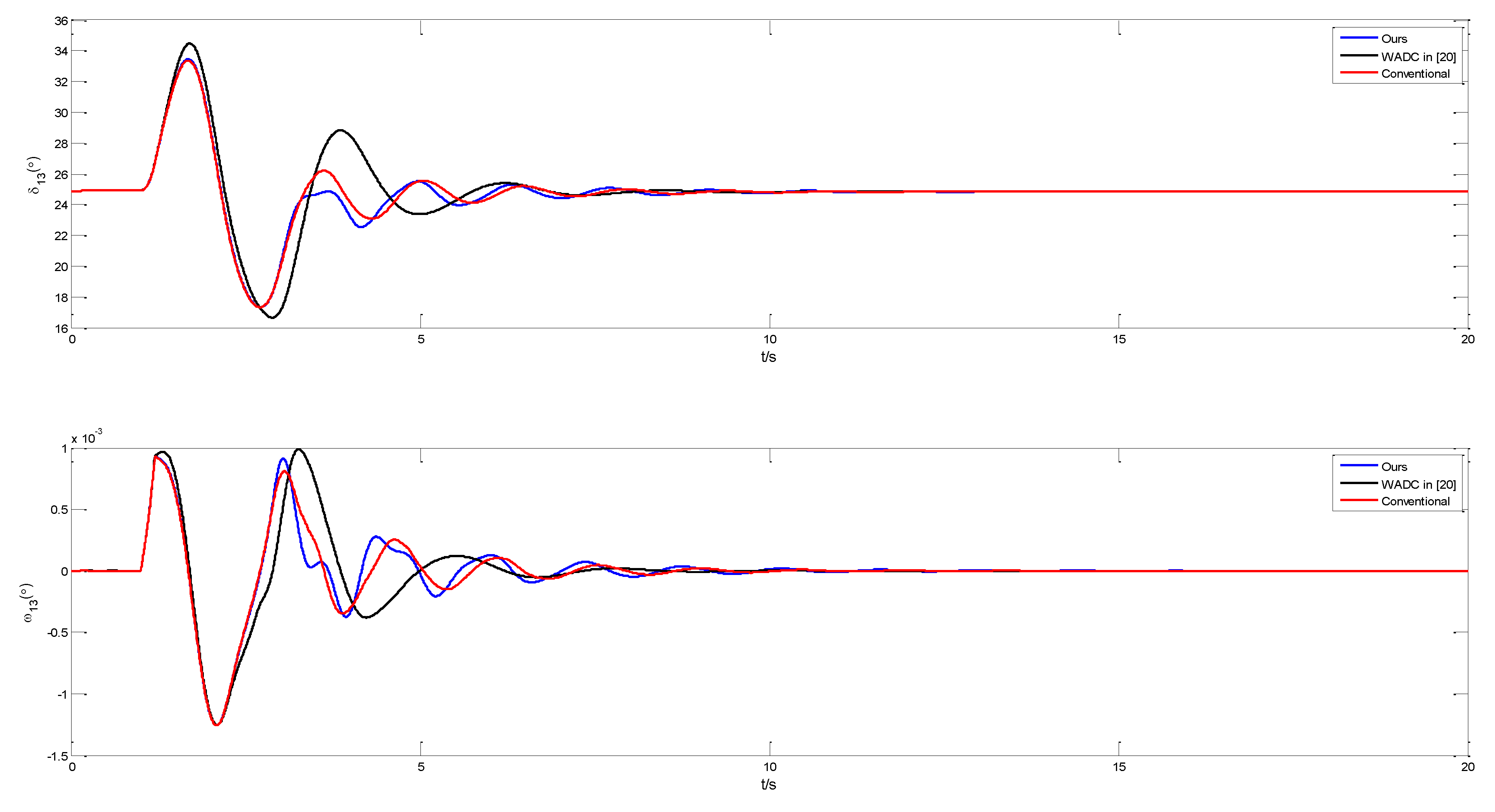
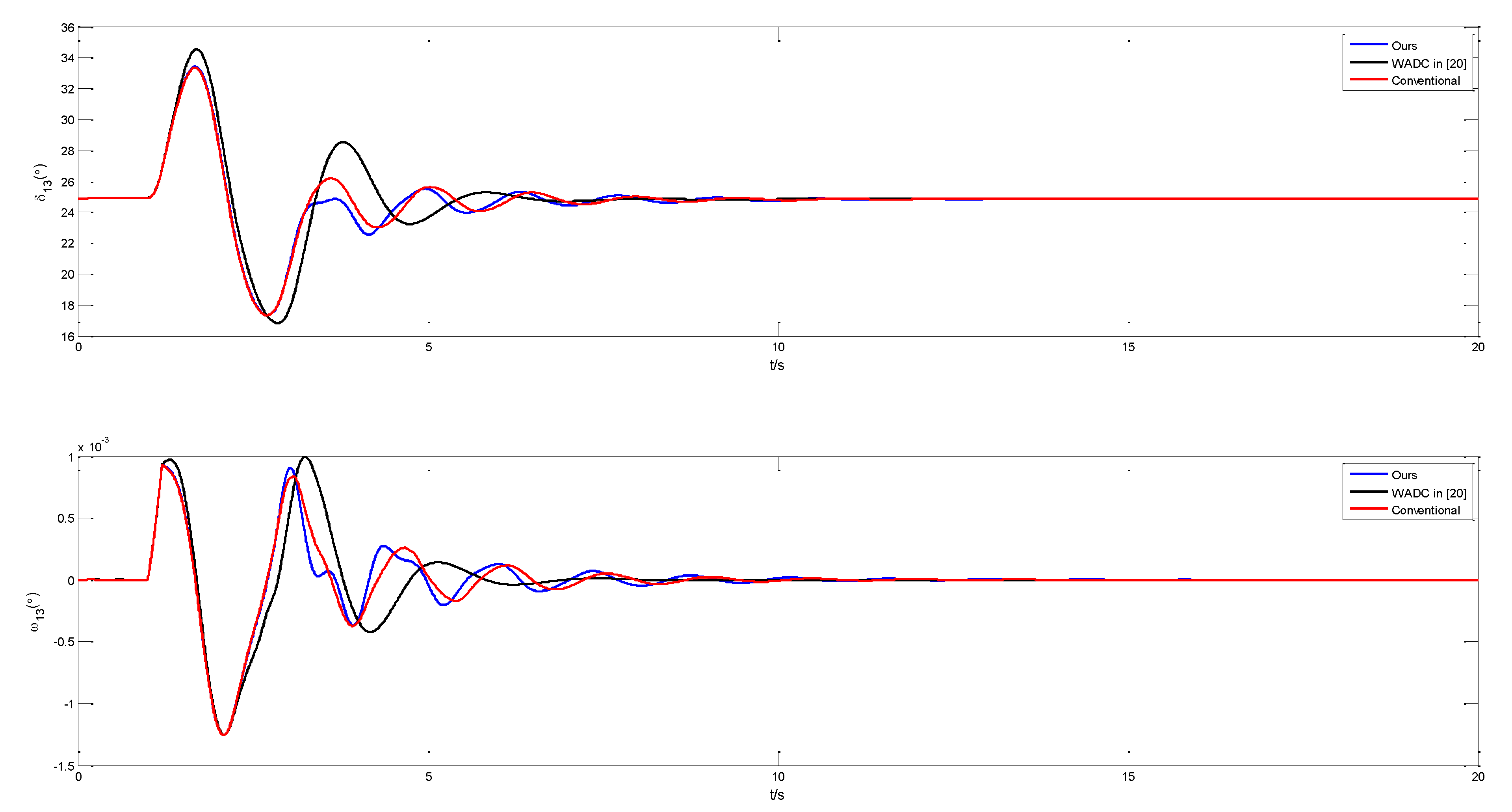
4. Simulation in Four Machine Two-Area Power System
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Kundur, P. Power System Stability and Control; McGraw Hill Education Private Limited: New Delhi, India, 2010. [Google Scholar]
- Prasertwong, K.; Mithulananthan, N.; Thakur, D. Understanding low frequency oscillation in power systems. Int. J. Electr. Eng. Educ. 2010, 47, 248–262. [Google Scholar] [CrossRef]
- Surinkaew, T.; Ngamroo, I. Hierarchical Co-Ordinated Wide Area and Local Controls of DFIG Wind Turbine and PSS for Robust Power Oscillation Damping. IEEE Trans. Sustain. Energy 2016, 7, 943–955. [Google Scholar] [CrossRef]
- Zhang, J.; Chung, C.Y.; Han, Y. A Novel Modal Decomposition Control and Its Application to PSS Design for Damping Interarea Oscillations in Power Systems. IEEE Trans. Power Syst. A Publ. Power Eng. Soc. 2012, 27, 2015–2025. [Google Scholar] [CrossRef]
- Ray, S.; Venayagamoorthy, G.K. Wide area signal based optimal neuro-controller for a UPFC. IEEE Trans. Power Deliv. 2008, 23, 1597–1605. [Google Scholar] [CrossRef]
- Kim, D.-I.; White, A.; Shin, Y.-J. PMU-Based Event Localization Technique for Wide-Area Power System. IEEE Trans. Power Syst. 2018, 33, 5875–5883. [Google Scholar] [CrossRef]
- Fesharaki, F.H.; Hooshmand, R.A.; Khodabakhshian, A. Simultaneous Optimal Design of Measurement and Communication Infrastructures in Hierar-chical Structured WAMS. IEEE Trans. Smart Grid 2014, 5, 312–319. [Google Scholar] [CrossRef]
- Agnihotri, P.; Kulkarni, A.M.; Gole, A.M.; Archer, B.A.; Weekes, T. A Robust Wide-Area Measurement-Based Damping Controller for Networks with Embedded Multiterminal and Multiinfeed HVDC Links. IEEE Trans. Power Syst. 2017, 32, 3884–3892. [Google Scholar] [CrossRef]
- Jiang, L.; Yao, W.; Wu, Q.H.; Wen, J.Y.; Cheng, S.J. Delay-Dependent Stability for Load Frequency Control With Constant and Time-Varying Delays. IEEE Trans. Power Syst. 2011, 27, 932–941. [Google Scholar] [CrossRef]
- Kamwa, I.; Samantaray, S.R.; Joos, G. Compliance Analysis of PMU Algorithms and Devices for Wide-Area Stabilizing Control of Large Power Systems. IEEE Trans. Power Syst. 2012, 28, 1766–1778. [Google Scholar] [CrossRef]
- Yao, W.; Jiang, L.; Wu, Q.H.; Wen, J.Y.; Cheng, S.J. Delay-Dependent Stability Analysis of the Power System With a Wide-Area Damping Controller Embedded. IEEE Trans. Power Syst. 2010, 26, 233–240. [Google Scholar] [CrossRef]
- Yao, W.; Jiang, L.; Wen, J.; Wu, Q.H.; Cheng, S. Wide-Area Damping Controller of FACTS Devices for Inter-Area Oscillations Considering Communication Time Delays. IEEE Trans. Power Syst. 2013, 29, 318–329. [Google Scholar] [CrossRef] [Green Version]
- Prakash, T.; Singh, V.P.; Mohanty, S.R. A synchrophasor measurement based wide-area power system stabilizer design for inter-area oscillation damping considering variable time-delays. Int. J. Electr. Power Energy Syst. 2019, 105, 131–141. [Google Scholar] [CrossRef]
- Zhu, K.; Rahimi, S.; Nordström, L.; Zhang, B. Design phasor data concentrator as adaptive delay buffer for wide-area damping control. Electr. Power Syst. Res. 2015, 127, 22–31. [Google Scholar] [CrossRef]
- Niu, X.; Ye, H.; Liu, Y.; Liu, X. Padé approximation based method for computation of eigenvalues for time delay power system. In Proceedings of the 48th International Universities' Power Engineering Conference (UPEC), Dublin, Ireland, 2–5 September 2013; pp. 1–4. [Google Scholar] [CrossRef]
- Majumder, R.; Chaudhuri, B.; Pal, B.; Zhong, Q.-C. A unified Smith predictor approach for power system damping control design using remote signals. IEEE Trans. Control. Syst. Technol. 2005, 13, 1063–1068. [Google Scholar] [CrossRef] [Green Version]
- Yu, S.S.; Chau, T.K.; Fernando, T.L.; Iu, H.H.-C. An Enhanced Adaptive Phasor Power Oscillation Damping Approach with Latency Compensation for Modern Power Systems. IEEE Trans. Power Syst. 2017, 33, 4285–4296. [Google Scholar] [CrossRef]
- Meng, L.; Yong, C.; Chen, A. Wide-Area Dynamic Damping Controller Based on Robust H∞ Control for Wide-Area Power Systems With Random Delay and Packet Dropout. IEEE Trans. Power Syst. 2018, 33, 4026–4037. [Google Scholar]
- Zhang, C.K.; Jiang, L.; Wu, Q.H.; He, Y.; Wu, M. Delay-Dependent Robust Load Frequency Control for Time Delay Power Systems. IEEE Trans. Power Syst. 2013, 28, 2192–2201. [Google Scholar] [CrossRef]
- Sun, M.; Nian, X.; Dai, L.; Guo, H. The design of delay-dependent wide-area DOFC with prescribed degree of stability alpha for damping inter-area low-frequency oscillations in power system. ISA Trans. 2017, 68, 82. [Google Scholar] [CrossRef]
- Alghamdi, S.; Markovic, U.; Stanojev, O.; Schiffer, J.; Hug, G.; Aristidou, P. Wide-area oscillation damping in low-inertia grids under time-varying communication delays. Electr. Power Syst. Res. 2020, 189, 106629. [Google Scholar] [CrossRef]
- Darabian, M.; Bagheri, A. Design of adaptive wide-area damping controller based on delay scheduling for improving small-signal oscilla-tions. Int. J. Electr. Power Energy Syst. 2021, 133, 107224. [Google Scholar] [CrossRef]
- Molina-Cabrera, A.; Ríos, M.A.; Besanger, Y.; Hadjsaid, N. A latencies tolerant model predictive control approach to damp Inter-area oscillations in delayed power systems. Int. J. Electr. Power Energy Syst. 2018, 98, 199–208. [Google Scholar] [CrossRef]
- Padhy, B.P.; Srivastava, S.C.; Verma, N.K. A Wide-Area Damping Controller Considering Network Input and Output Delays and Packet Drop. IEEE Trans. Power Syst. 2016, 32, 166–176. [Google Scholar] [CrossRef]
- Mekki, K.; Snyder, A.F.; HadjSaid, N.; Feuillet, R.; Georges, D.; Margotin, T. Damping controller input-signal loss effects on the wide-area stability of an interconnected power system. In Proceedings of the 2000 Power Engineering Society Summer Meeting (Cat. No.00CH37134), Seattle, WA, USA, 16–20 July 2000; pp. 1015–1019. [Google Scholar]
- Sevilla, F.R.S.; Jaimoukha, I.M.; Chaudhuri, B.; Korba, P. A Semidefinite Relaxation Procedure for Fault-Tolerant Observer Design. IEEE Trans. Autom. Control. 2015, 60, 3332–3337. [Google Scholar] [CrossRef] [Green Version]
- Segundo Sevilla, F.R.; Jaimoukha, I.; Chaudhuri, B.; Korba, P. Fault-tolerant control design to enhance damping of inter-area oscillations in power grids. Int. J. Robust Nonlinear Control. 2014, 24, 1304–1316. [Google Scholar] [CrossRef] [Green Version]
- Wang, S.; Meng, X.; Chen, T. Wide-Area Control of Power Systems through Delayed Network Communication. IEEE Trans. Control. Syst. Technol. 2011, 20, 495–503. [Google Scholar] [CrossRef]
- Li, Y.; Zhou, Y.; Liu, F.; Cao, Y.; Rehtanz, C. Design and Implementation of Delay-Dependent Wide-Area Damping Control for Stability Enhancement of Power Systems. IEEE Trans. Smart Grid 2016, 8, 1831–1842. [Google Scholar] [CrossRef]
- Li, Y.; Liu, F.; Rehtanz, C.; Luo, L.; Cao, Y. Dynamic output-feedback wide area damping control of HVDC transmission considering signal time-varying delay for stability enhancement of interconnected power systems. Renew. Sustain. Energy Rev. 2012, 16, 5747–5759. [Google Scholar] [CrossRef]
- Zhang, Y.; Dong, Y.; Hu, S. WAMS-based dynamic output-feedback control of power systems with network-induced delay and random data missing. In Proceedings of the 2015 34th Chinese Control Conference (CCC), Hangzhou, China, 28–30 July 2015. [Google Scholar]
- Chaudhuri, B.; Majumder, R.; Pal, B. Wide-Area Measurement-Based Stabilizing Control of Power System Considering Signal Transmission Delay. IEEE Trans. Power Syst. 2004, 19, 1971–1979. [Google Scholar] [CrossRef] [Green Version]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Mode No. | Mode Type | Frequency (Hz) | Damping Ratio |
|---|---|---|---|
| 1 | Inter-area | 0.424 | −0.0249 |
| 2 | Local | 1.162 | 0.0952 |
| 3 | Local | 1.114 | 0.0995 |
| 0 | 0.01 | 0.05 | 0.1 | 0.15 | 0.2 | 0.25 | |
| 431 | 390 | 362 | 283 | 264 | 247 | 209 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sun, M.; Guo, Y.; Song, S. The Delay-Dependent DOFC for Damping Inter-Area Low-Frequency Oscillations in an Interconnected Power System Considering Packet Loss of Wide-Area Signals. Energies 2021, 14, 5892. https://doi.org/10.3390/en14185892
Sun M, Guo Y, Song S. The Delay-Dependent DOFC for Damping Inter-Area Low-Frequency Oscillations in an Interconnected Power System Considering Packet Loss of Wide-Area Signals. Energies. 2021; 14(18):5892. https://doi.org/10.3390/en14185892
Chicago/Turabian StyleSun, Miaoping, Yaosheng Guo, and Seyha Song. 2021. "The Delay-Dependent DOFC for Damping Inter-Area Low-Frequency Oscillations in an Interconnected Power System Considering Packet Loss of Wide-Area Signals" Energies 14, no. 18: 5892. https://doi.org/10.3390/en14185892
APA StyleSun, M., Guo, Y., & Song, S. (2021). The Delay-Dependent DOFC for Damping Inter-Area Low-Frequency Oscillations in an Interconnected Power System Considering Packet Loss of Wide-Area Signals. Energies, 14(18), 5892. https://doi.org/10.3390/en14185892