
Efficiency Increase of Energy Systems in Oil and Gas Industry by Evaluation of Electric Drive Lifecycle



Abstract
:1. Introduction
2. Materials and Methods
Method for Assessing the ED Technical Condition
- (1)
- f(NET)—monotone (usually non-decreasing) function;
- (2)
- |f(NET)| ≤ 1,
3. Results and Discussion
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Nomenclature
| FFT | finite Fourier transform |
| ED | electric drives |
| AM | asynchronous motor |
| EB | executive body |
| ANN | artificial neural network |
| DCB | data collection board |
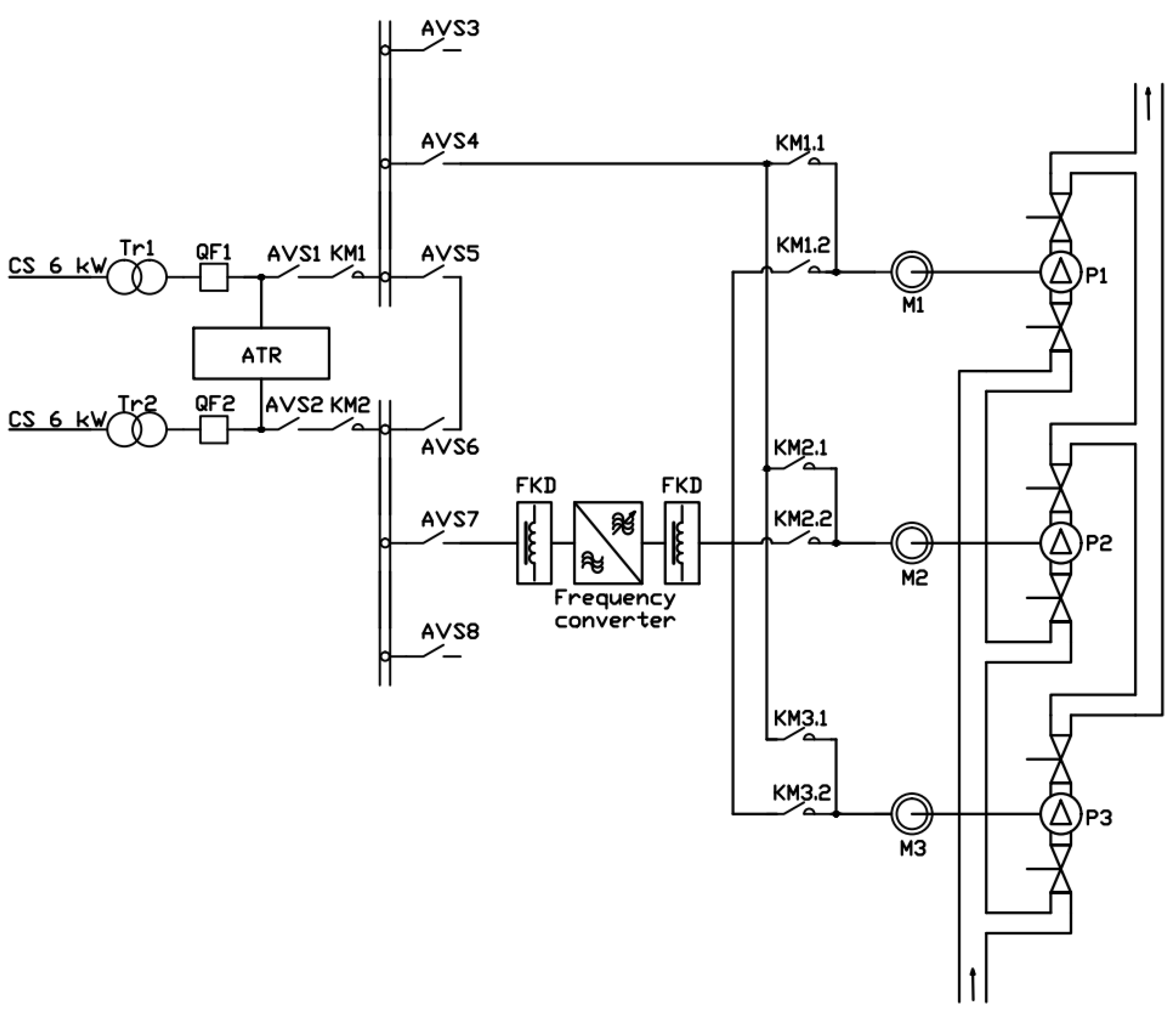
| CS | closed switchgear |
| Tr | transformer |
| QF | circuit breaker |
| ATR | automatic transfer of reserve |
| AVS | automatic vacuum switch |
| FKD | filter |
| KM | magnetic contactor |
| AM | asynchronous motor |
| P | pump |
| List of Symbols | |
| I1p, U1p | amplitude of the fundamental harmonic of current and voltage in a phase (A, V) |
| I, U | effective value of current and voltage (A, V) |
| P, S | net and apparent power (W, VAR) |
| In | amplitude harmonics of the stator current, multiples of the fundamental harmonic (A) |
| Im | amplitudes of current harmonics (A), multiples of the carrier frequency |
| Inm | amplitudes of the combinational harmonics for the stator current (A) |
| Idi | amplitude values of stator current (A), corresponding to the defect |
| Ist(n), Ist(q), Ist(di) | harmonic components of stator current (A) |
| ir, id.st, ib, iec | amplitude values of the stator current modulated with defects in the rotor, stator, bearings and eccentricity of the air gap |
| ω1 | rotation frequency for the fundamental current harmonic (rad/s) |
| ωH | rotation frequency for the carrier harmonic of the stator current (rad/s) |
| ωr | rotor rotation frequency (rad/s) |
| ωdi | rotation frequency for the harmonic component of the stator current caused by the defect (rad/s) |
| φ | shift angle between fundamental harmonic of phase current and voltage (rad) |
| s | asynchronous motor slip |
| rs | number of rotor rods |
| f1, fH | fundamental and carrier frequencies (Hz) |
| fdi | defect frequency (Hz) |
| M(n), M(qp), M(di) | components of the electromagnetic moment (Nm), created as a result of the interaction of the n harmonics for the stator current and the rotor flux linkage, di harmonics for the stator current and the rotor flux linkage, q harmonic for the stator current and p harmonic of the rotor flux linkage |
| Mav | average value of the electromagnetic moment of the asynchronous motor (N∙m) |
| ψr(n), ψr(p), ψr(di) | harmonic components of rotor flux linkage (Wb) |
| θ(qp) | angle between the q harmonic of the stator current and the p harmonic of the rotor flux linkage(rad) |
| θ(di) | angle between the di harmonics of the stator current and the rotor flux linkage (rad) |
| T | average ambient temperature |
| ρ | humidity |
| ξ | insulation strength |
| vr(t) | reducer speed signal |
| vi(t) | EB signal |
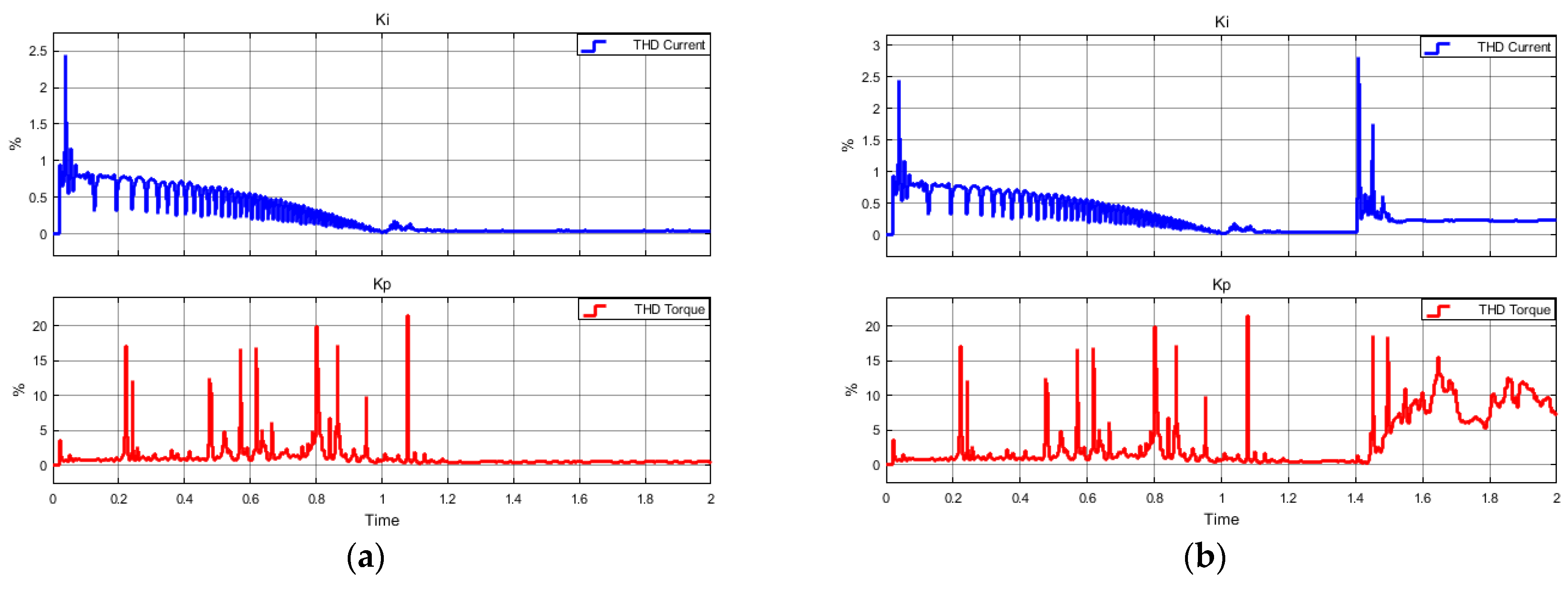
| KI(n) | harmonic distortion coefficient of current, determined by the quality of electrical energy in the supply network in phases A, B, C |
| KI* | harmonic distortion of current in phases A, B, C of the electric motor, determined by defects |
| Kp(n) | pulsation coefficient of the electromagnetic moment, determined by the type and structure of the power frequency converter |
| Kp* | pulsation coefficient of the electromagnetic moment, determined by the type and level of defect in the motor and the mechanical part of the electric drive |
| K1 | coefficient taking into account the state of the boundaries for the assessment of vibration parameters, and detected defects at the time t and depending on the normal, pre-crisis and crisis states |
| K2 | coefficient taking into account the state of the boundaries for the assessment of electrical parameters, and onset (detection) of defects at time t and depending on the normal, pre-crisis and crisis states |
| K3 | coefficient that takes into account the state of the boundaries for the assessment of vibration parameters, and measured parameters and factors affecting the forecast of the lifecycle, at time t and depending on the normal, pre-crisis and crisis states |
| K4 | coefficient taking into account the state of the boundaries for the assessment of electrical parameters, and measured parameters and factors affecting the forecast of the lifecycle, at time t and depending on the normal, pre-crisis and crisis states |
| Pih(h), Pim(m) | probabilities for vibration and electrical parameters, taking into account ANN operation |
| ε | ANN training rate |
| δ | lifecycle indicator |
| ∆wij; ∆θj | correction for weight coefficients and threshold levels, taking into account the calculated output and comparing the resulting output vector ys with the standard ds |
References
- Sychev, Y.A.; Zimin, R.Y. Improving the quality of electricity in the power supply systems of the mineral resource complex with hybrid filter-compensating devices. J. Min. Inst. 2021, 247, 132–140. [Google Scholar] [CrossRef]
- Shklyarskiy, Y.; Skamyin, A.; Vladimirov, I.; Gazizov, F. Distortion load identification based on the application of compensating devices. Energies 2020, 13, 1430. [Google Scholar] [CrossRef] [Green Version]
- Kodkin, V.L.; Anikin, A.S.; Baldenkov, A.A. Performance identification of the asynchronous electric drives by the spectrum of rotor currents. Int. J. Power Electron. Drive Syst. 2019, 10, 211–218. [Google Scholar] [CrossRef]
- Marco, L.; Blaabjerg, F.; Hansen, S. Design and control of an LCL-filter-based three-phase active rectifier. IEEE Trans. Ind. Appl. 2005, 41, 1281. [Google Scholar] [CrossRef]
- Dell’Aquila, A.; Liserre, M.; Monopoli, V.G.; Rotondo, P. An energy-based control for an nH-bridges multilevel active rectifier. IEEE Trans. Ind. Electron. 2005, 52, 670. [Google Scholar] [CrossRef]
- Zhukovskiy, Y.L.; Korolev, N.; Filatova, I. Asynchronous motor drive operability field with two-link structure of frequency converter. J. Phys. Conf. Ser. 2020, 1661, 012127. [Google Scholar] [CrossRef]
- Klyuev, R.V.; Bosikov, I.I.; Mayer, A.V.; Gavrina, O.A. Comprehensive analysis of the effective technologies application to increase sustainable development of the natural-technical system. Sustain. Dev. Mt. Territ. 2020, 2, 283–290. [Google Scholar] [CrossRef]
- Salomon, C.P.; Ferreira, C.; Sant’Ana, W.C.; Lambert-Torres, G.; Borges da Silva, L.E.; Bonaldi, E.L.; Torres, B.S. A study of fault diagnosis based on electrical signature analysis for synchronous generators predictive maintenance in bulk electric systems. Energies 2019, 12, 1506. [Google Scholar] [CrossRef] [Green Version]
- Filatova, I.; Nikolaichuk, L.; Zakaev, D.; Ilin, I. Public-private partnership as a tool of sustainable development in the oil-refining sector: Russian case. Sustainability 2021, 13, 5153. [Google Scholar] [CrossRef]
- Lavrenko, S.A.; Shishljannikov, D.I. Performance evaluation of heading-and-winning machines in the conditions of potash mines. Appl. Sci. 2021, 11, 3444. [Google Scholar] [CrossRef]
- Klyuev, R.; Fomenko, O.; Gavrina, O.; Turluev, R.; Marzoev, S. Energy indicators of drilling machines and excavators in mountain territories. In Energy Management of Municipal Transportation Facilities and Transport; Springer: Cham, Switzerland, 2019; Volume 1258, pp. 272–281. [Google Scholar] [CrossRef]
- Natalia, K.; Frenkel, I. Digital Processing of Seismic Data from Open-Pit Mining Blasts. Appl. Sci. 2021, 11, 383. [Google Scholar] [CrossRef]
- Minav, T.A.; Laurila, L.I.E.; Pyrhönen, J.J. Analysis of electro-hydraulic lifting system’s energy efficiency with direct electric drive pump control. Autom. Constr. 2013, 30, 144. [Google Scholar] [CrossRef]
- CusidÓCusido, J.; Romeral, L.; Ortega, J.A.; Rosero, J.A.; Espinosa, A.G. Fault detection in induction machines using power spectral density in wavelet decomposition. IEEE Trans. Ind. Electron. 2008, 55, 633. [Google Scholar] [CrossRef]
- Wang, J.; Fu, P.; Zhang, L.; Gao, R.X.; Zhao, R. Multilevel information fusion for induction motor fault diagnosis. IEEE/ASME Trans. Mechatron. 2019, 24, 2139. [Google Scholar] [CrossRef]
- Glowacz, A.; Glowacz, W.; Kozik, J.; Piech, K.; Gutten, M.; Caesarendra, W.; Khan, Z.F. Detection of deterioration of three-phase induction motor using vibration signals. Meas. Sci. Rev. 2019, 19, 241. [Google Scholar] [CrossRef] [Green Version]
- Raj, V.P.; Natarajan, K.; Girikumar, S.T. Induction motor fault detection and diagnosis by vibration analysis using MEMS accelerometer. In Proceedings of the 2013 International Conference on Emerging Trends in Communication, Control, Signal Processing and Computing Applications (C2SPCA), Bangalore, India, 10–11 October 2013; IEEE: Bangalore, India, 2013; pp. 1–6. [Google Scholar] [CrossRef]
- Tsypkin, M. Induction motor condition monitoring: Vibration analysis technique-a twice line frequency component as a diagnostic tool. In Proceedings of the 2013 International Electric Machines & Drives Conference, Chicago, IL, USA, 12–15 May 2013; IEEE: Chicago, IL, USA, 2013; pp. 117–124. [Google Scholar] [CrossRef]
- Seker, S.; Ayaz, E. Feature extraction related to bearing damage in electric motors by wavelet analysis. J. Frankl. Inst. 2003, 340, 125–134. [Google Scholar] [CrossRef]
- Kar, C.; Mohanty, A.R. Monitoring gear vibrations through motor current signature analysis and wavelet transform. Mech. Syst. Signal Process. 2006, 20, 158–187. [Google Scholar] [CrossRef]
- Ye, Z.; Wu, B.; Sadeghian, A. Current signature analysis of induction motor mechanical faults by wavelet packet decomposition. IEEE Trans. Ind. Electron. 2003, 50, 1217. [Google Scholar] [CrossRef]
- Kiselichnik, O.I.; Bodson, M. Nonsensor control of centrifugal water pump with asynchronous electric-drive motor based on extended Kalman filter. Russ. Electr. Eng. 2011, 82, 69–75. [Google Scholar] [CrossRef]
- Uddin, J.; Kang, M.; Nguyen, D.V.; Kim, J.M. Reliable fault classification of induction motors using texture feature extraction and a multiclass support vector machine. Math. Probl. Eng. 2014, 2014, 814593. [Google Scholar] [CrossRef]
- Glowacz, A. Diagnostics of DC and induction motors based on the analysis of acoustic signals. Meas. Sci. Rev. 2014, 14, 257. [Google Scholar] [CrossRef] [Green Version]
- Petruk, O.; Szewczyk, R.; Ciuk, T.; Strupiński, W.; Salach, J.; Nowicki, M.; Trzcinka, K. Sensitivity and offset voltage testing in the hall-effect sensors made of graphene. In Recent Advances in Automation, Robotics and Measuring Techniques; Springer: Cham, Switzerland, 2014; Volume 267. [Google Scholar] [CrossRef]
- Vasilev, B.Y. The study methods of increase efficiency algorithms pulse width modulation in AC electric drives. Int. J. Electr. Comput. Eng. 2016, 6, 2855. [Google Scholar] [CrossRef] [Green Version]
- Long, P.T.; Van An, N.; Vasilev, B. Compare the Efficiency of the Active Filter and Active Rectifier to Reduce Harmonics and Compensate the Reactive Power in Frequency Controlled Electric Drive Systems. In International Conference on Engineering Research and Applications; Springer: Cham, Switzerland, 2020; Volume 78, pp. 242–253. [Google Scholar] [CrossRef]
- Belsky, A.A.; Saint Petersburg Mining University; Dobush, V.S.; Haikal, S.F. Lebanese University Operation of a Single-phase Autonomous Inverter as a Part of a Low-power Wind Complex. J. Min. Inst. 2019, 239, 564–569. [Google Scholar] [CrossRef]
- Cardoso, A.J.M.; Saraiva, E.S. Computer aided detection of Airgap eccentricity in operating three phase induction motors by Park’s vector approach. IEEE Trans. Ind. Appl. 1993, 29, 897–901. [Google Scholar] [CrossRef]
- Zhukovskiy, Y.L.; Korolev, N.A.; Babanova, I.S.; Boikov, A. The probability estimate of the defects of the asynchronous motors based on the complex method of diagnostics. IOP Conf. Ser. Earth Environ. Sci. 2017, 87. [Google Scholar] [CrossRef]
- Jing, L.; Zhao, M.; Li, P.; Xu, X. A convolutional neural network based feature learning and fault diagnosis method for the condition monitoring of gearbox. Measurement 2017, 111, 1–10. [Google Scholar] [CrossRef]
- Thomson, W.T.; Fenger, M. Current signature analysis to detect induction motor faults. IEEE Ind. Appl. 2001, 7, 26–34. [Google Scholar] [CrossRef]
- Tino, P.; Benuskova, L.; Sperduti, A. Artificial neural network models. In Springer Handbook of Computational Intelligence; Springer: Berlin/Heidelberg, Germany, 2015; pp. 455–471. [Google Scholar] [CrossRef]
- Bounds, D.G.; Lloyd, P.J.; Mathew, B.G.; Waddell, G. A multilayer perceptron network for the diagnosis of low back pain. ICNN 1988, 2, 481–489. [Google Scholar] [CrossRef]
- Vasil’ev, B.Y.; Shpenst, V.A.; Kalashnikov, O.V. Providing energy decoupling of electric drive and electric grids for industrial electrical installations. J. Min. Inst. 2018, 229, 41. [Google Scholar] [CrossRef]
- Xiao, C.; Ye, J.; Esteves, R.M.; Rong, C. Using Spearman’s correlation coefficients for exploratory data analysis on big dataset. Concurr. Comput. Pract. Exp. 2016, 28, 3866–3878. [Google Scholar] [CrossRef]
- Rebekić, A.; Lončarić, Z.; Petrović, S.; Marić, S. Pearson’s or Spearman’s correlation coefficient-which one to use. Poljoprivreda 2015, 21, 47–54. [Google Scholar] [CrossRef]
- Abramovich, B.N. Uninterruptible power supply system for mining industry enterprises. J. Min. Inst. 2018, 229, 31. [Google Scholar] [CrossRef]
- Abramovich, B.N.; Veprikov, A.A.; Sychev, Y.A.; Lyakh, D.A. Use of active power transducers in industrial dc power systems supplying electrolysis cells. Tsvetnye Met 2020, 2, 95–100. [Google Scholar] [CrossRef]
- Turysheva, A.; Voytyuk, I.; Guerra, D. Estimation of Electricity Generation by an Electro-Technical Complex with Photoelectric Panels Using Statistical Methods. Symmetry 2021, 13, 1278. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | |||
|---|---|---|---|
| Electrical | Vibration | Indirect | |
| Registered | 1. Instantaneous current values in each phase (I, Ist) | 1. Instantaneous vibration displacement values (axial sx, horizontal sy, vertical sz) | 1. Average ambient temperature (T) |
| 2. Instantaneous voltage values in each phase (U, Ust) | 2. Instantaneous values of vibration velocity (axial vx, horizontal vy, vertical vz) | 2. Humidity (ρ) | |
| 3. Instantaneous power values in each phase (P, S) | 3. Instantaneous values of vibration acceleration (axial ax, horizontal ay, vertical az) | 3. Insulation durability (ξ) | |
| 4. Reducer speed (vr(t)) | |||
| 5. Executive body speed (vi(t)) | |||
| Calculated/statistical/repair | 1. Current RMS in each phase | 4. Vibration displacement RMS | |
| 2. Voltage RMS in each phase | 5. Vibration velocity RMS | ||
| 3. Power RMS in each phase | 6. Vibration acceleration RMS | ||
| 4. Current spectra of each phase | 7. Spectrum of vibration displacement | ||
| 5. Power spectra of each phase | 8. Spectrum of vibration velocity | ||
| 6. Power factor | 9. Spectrum of vibration acceleration | ||
| 7. Power loss value | 10. Fundamental harmonic power | ||
| 8. Voltage unbalance coefficients | |||
| Defects | mi i: | hi i: | Probability | ||||
|---|---|---|---|---|---|---|---|
| Normal State | Pre-Crisis state | Crisis State | According to Factory Data | Actual State | |||
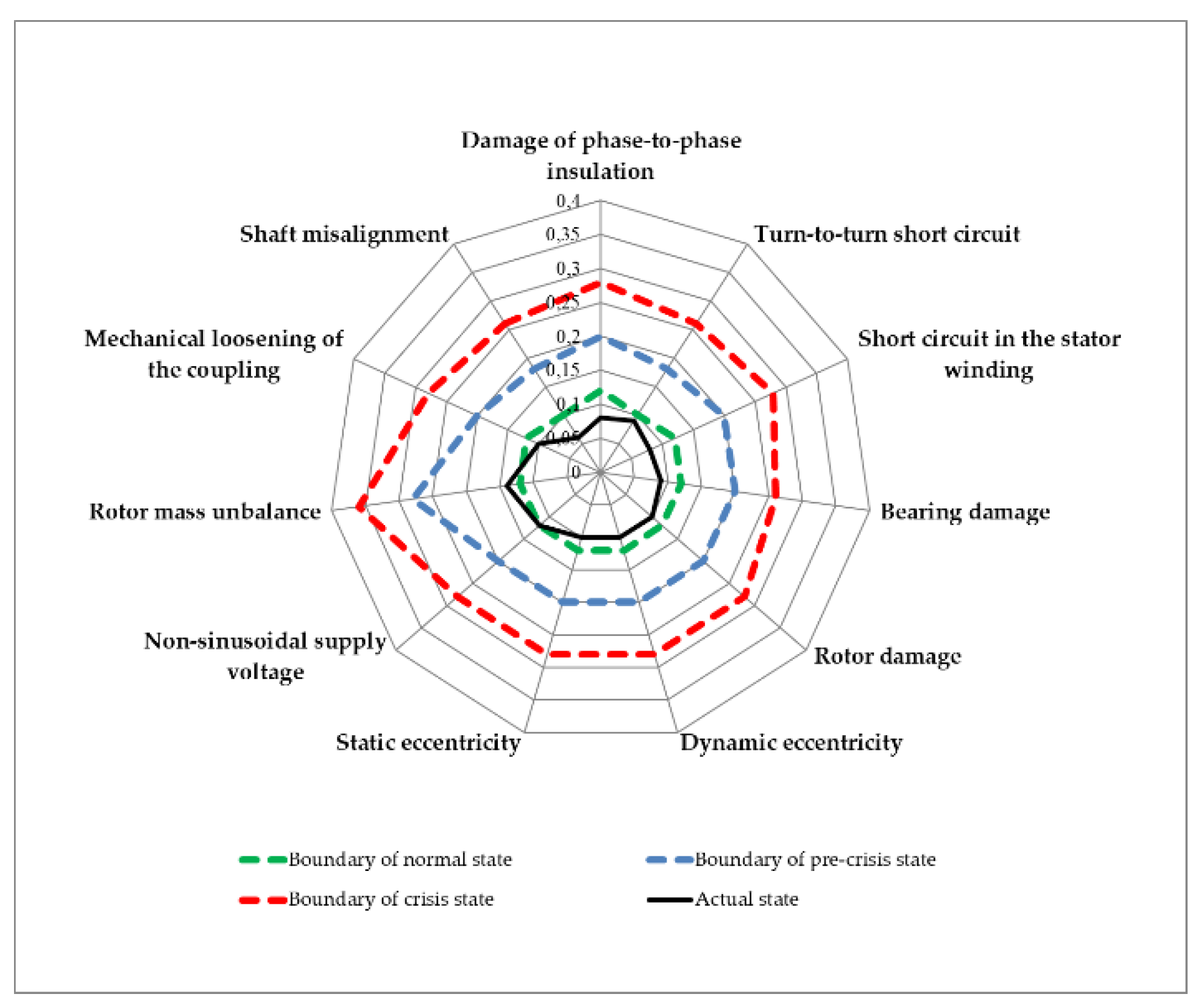
| Damage of phase-to-phase insulation | 1 | 0.12 | 0.2 | 0.28 | 0.1 | 0.16 | |
| Turn-to-turn short circuit | 2 | 0.1 | 0.18 | 0.26 | 0.09 | 0.3 | |
| Short circuit in the stator winding | 3 | 0.12 | 0.2 | 0.28 | 0.1 | 0.12 | |
| Bearing damage | 1 | 0.1 | 0.18 | 0.26 | 0.09 | 0.17 | |
| Rotor damage | 2 | 0.12 | 0.2 | 0.28 | 0.1 | 0.16 | |
| Dynamic eccentricity | 4 | 3 | 0.12 | 0.2 | 0.28 | 0.1 | 0.3 |
| Static eccentricity | 5 | 4 | 0.12 | 0.2 | 0.28 | 0.1 | 0.3 |
| Non-sinusoidal supply voltage | 6 | 0.12 | 0.2 | 0.28 | 0.1 | 0.14 | |
| Rotor mass unbalance | 5 | 0.2 | 0.28 | 0.36 | 0.14 | 0.18 | |
| Mechanical loosening of the coupling | 6 | 0.12 | 0.2 | 0.28 | 0.1 | 0.22 | |
| Shaft misalignment | 7 | 0.1 | 0.18 | 0.26 | 0.09 | 0.14 | |
| Lifecycle Indicator δ | Technical Condition Characteristics | Operation Permission |
|---|---|---|
| 0 < δ ≤ 0.1 | “reference” state, no effect on performance | Permitted |
| 0.1< δ ≤ 0.2 | “normal” state, impact on performance is insignificant | Permitted |
| 0.2 < δ ≤ 0.4 | “pre-crisis” state, requires integrated diagnostics with set periods, reducing the load on the unit | Permitted with integrated diagnostics |
| 0.4 < δ ≤ 1 | “crisis” state, high probability of failure, equipment is sent for repair | Not permitted |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Korolev, N.; Kozyaruk, A.; Morenov, V. Efficiency Increase of Energy Systems in Oil and Gas Industry by Evaluation of Electric Drive Lifecycle. Energies 2021, 14, 6074. https://doi.org/10.3390/en14196074
Korolev N, Kozyaruk A, Morenov V. Efficiency Increase of Energy Systems in Oil and Gas Industry by Evaluation of Electric Drive Lifecycle. Energies. 2021; 14(19):6074. https://doi.org/10.3390/en14196074
Chicago/Turabian StyleKorolev, Nikolay, Anatoly Kozyaruk, and Valentin Morenov. 2021. "Efficiency Increase of Energy Systems in Oil and Gas Industry by Evaluation of Electric Drive Lifecycle" Energies 14, no. 19: 6074. https://doi.org/10.3390/en14196074
APA StyleKorolev, N., Kozyaruk, A., & Morenov, V. (2021). Efficiency Increase of Energy Systems in Oil and Gas Industry by Evaluation of Electric Drive Lifecycle. Energies, 14(19), 6074. https://doi.org/10.3390/en14196074