Effect of Braking Plates on the Aerodynamic Behaviors of a High-Speed Train Subjected to Crosswinds


Abstract
:1. Introduction
2. Methods
2.1. Fluid Mechanics
2.2. Kriging Regression
3. Numerical Model and Validation
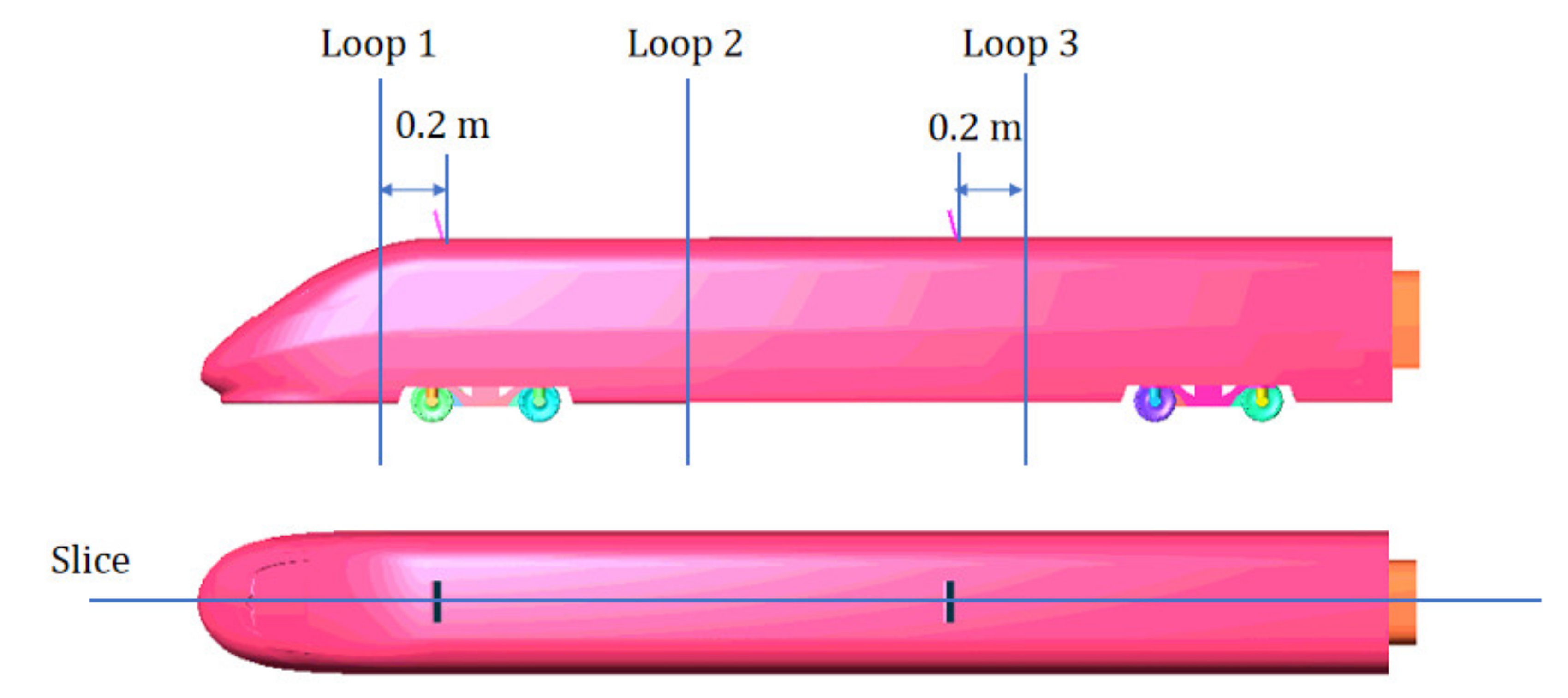
3.1. Numerical Model
3.2. Simulation Settings
3.3. Validation
3.3.1. Simulation Method Verification
3.3.2. Aerodynamic Verification of Train without Braking Plates
3.3.3. Flat Plane’s Aerodynamic Verification
3.3.4. Overall Verification
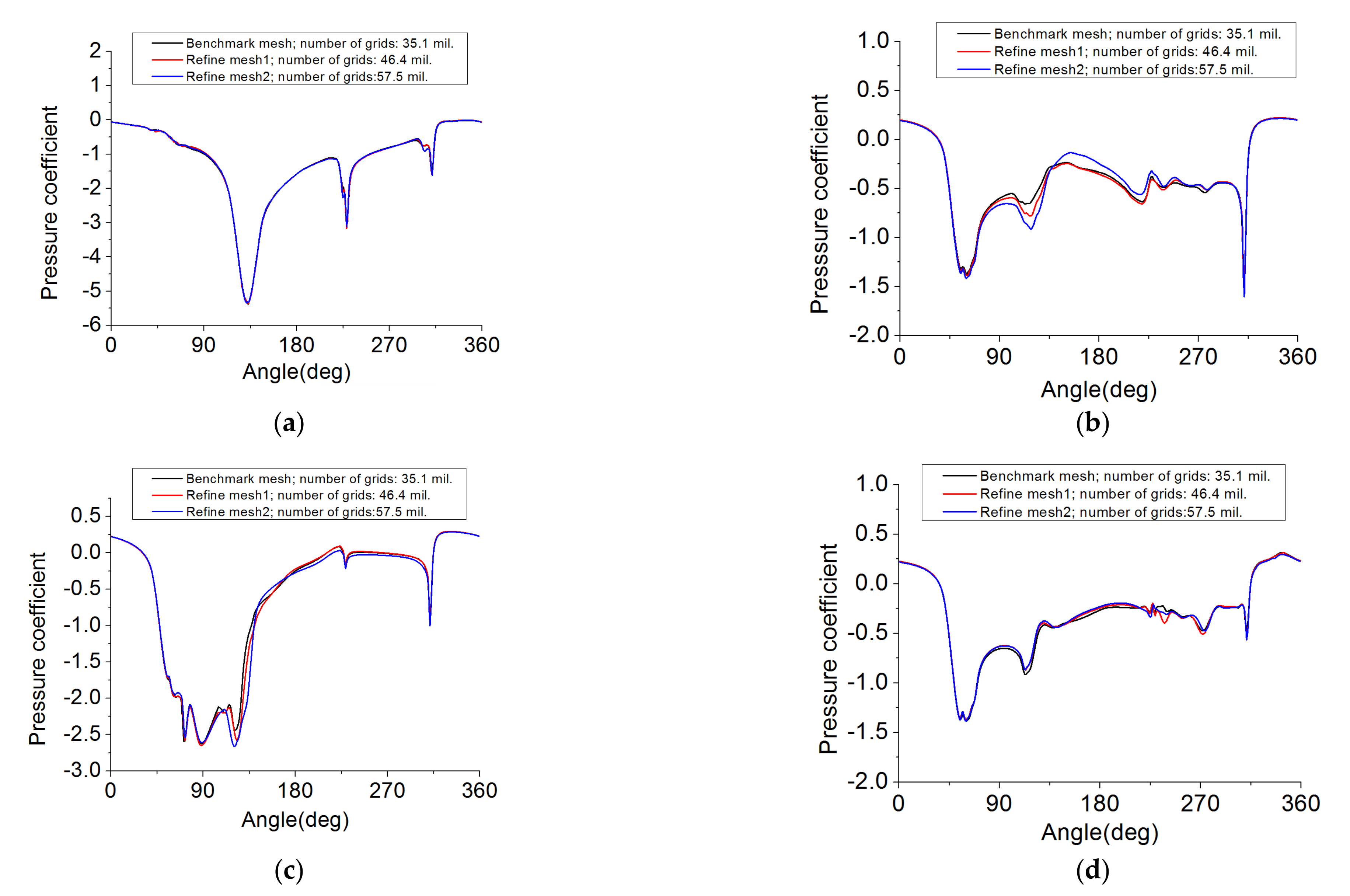
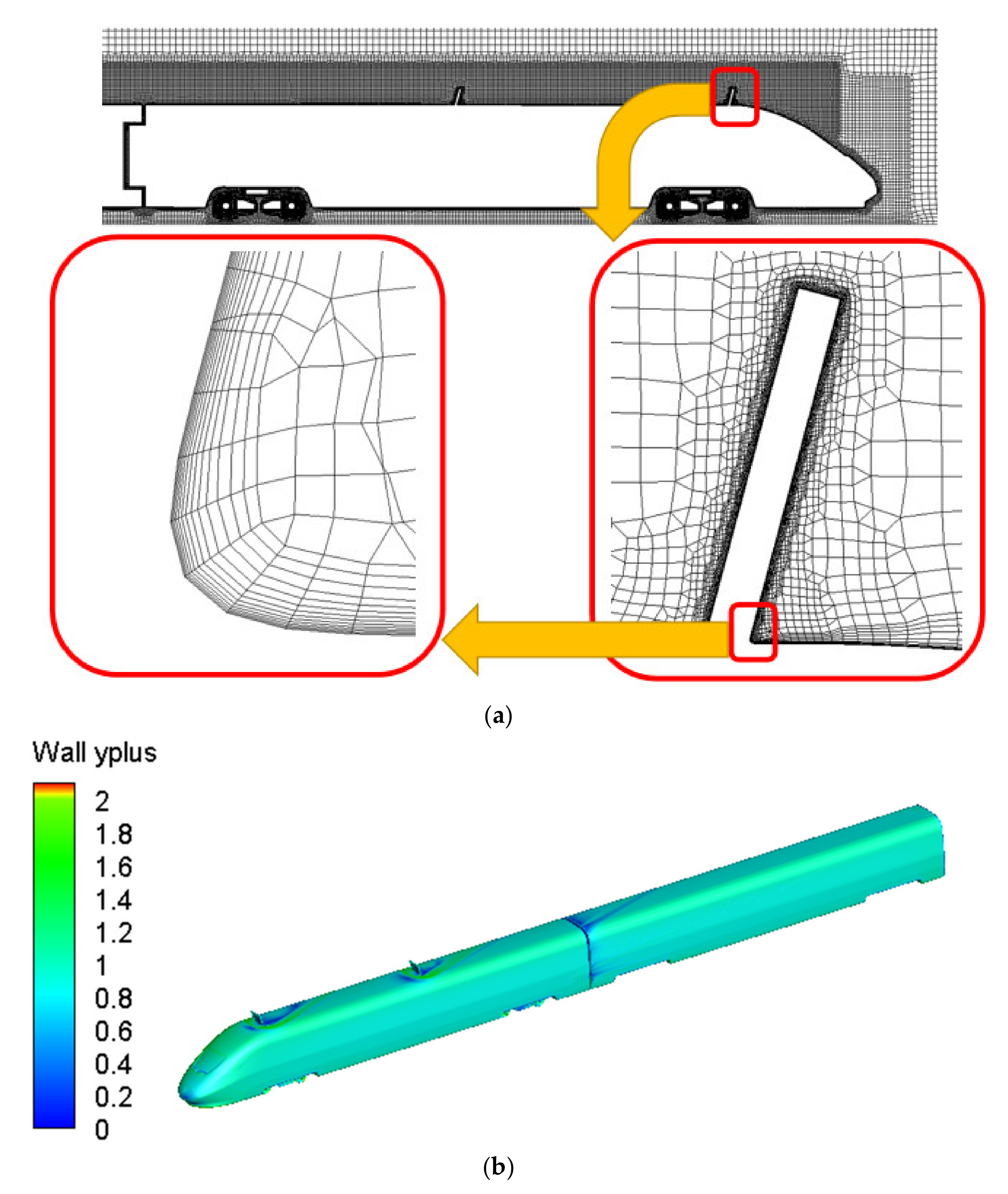
3.4. Grid Size of Train and Braking Plates
4. Result
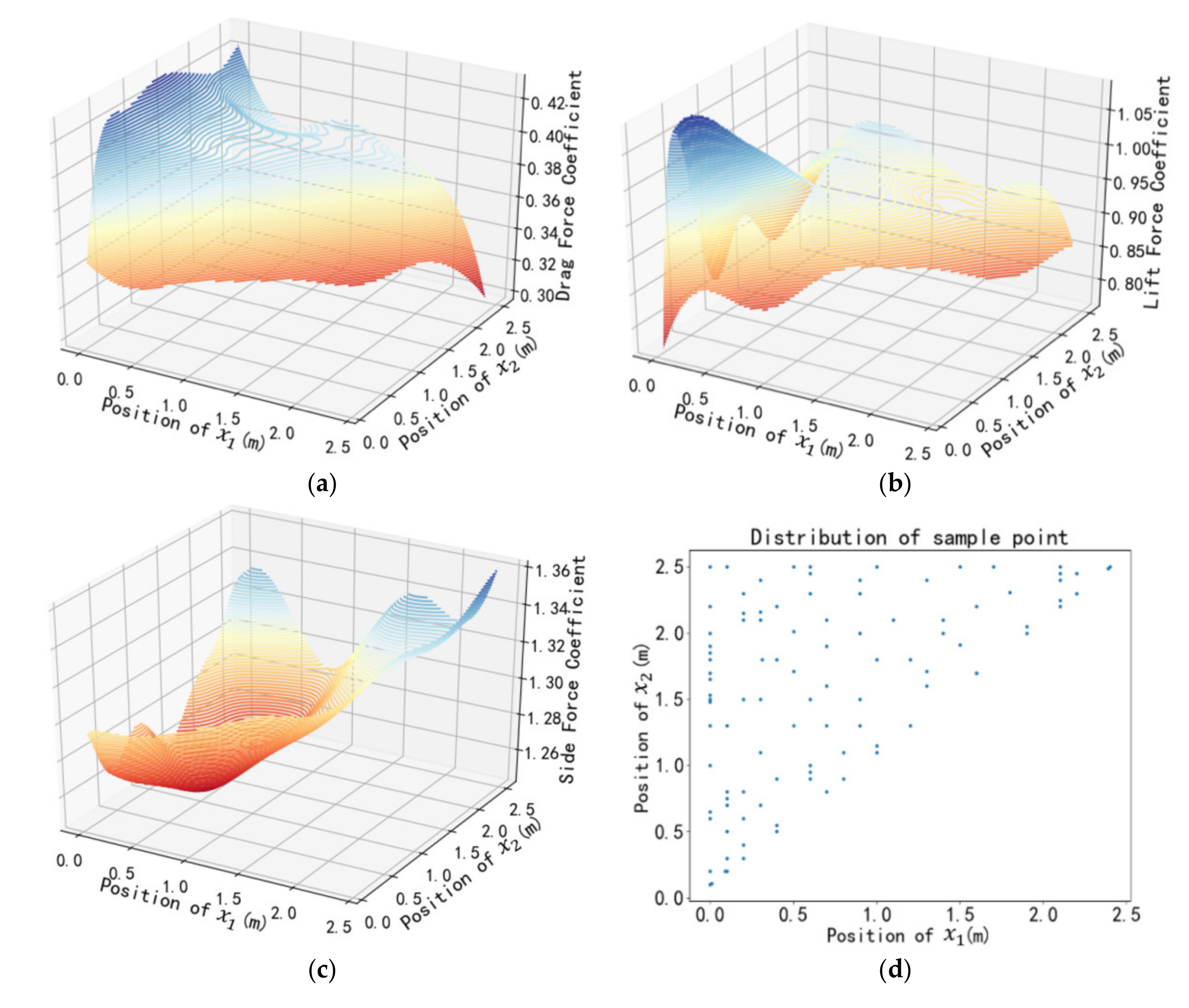
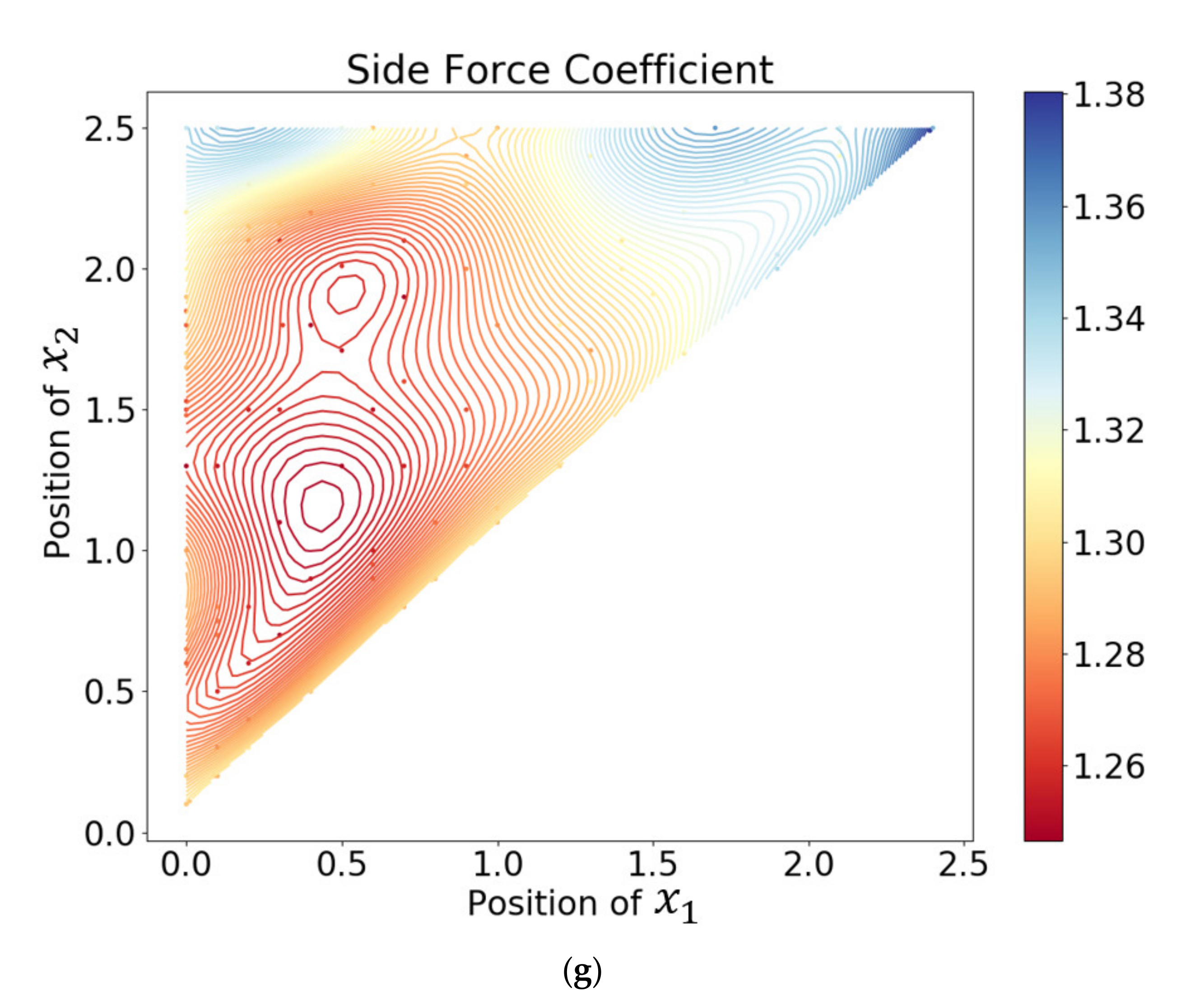
4.1. Influence of Installation Position of Braking Plates on the Aerodynamic Loads of the Head Car
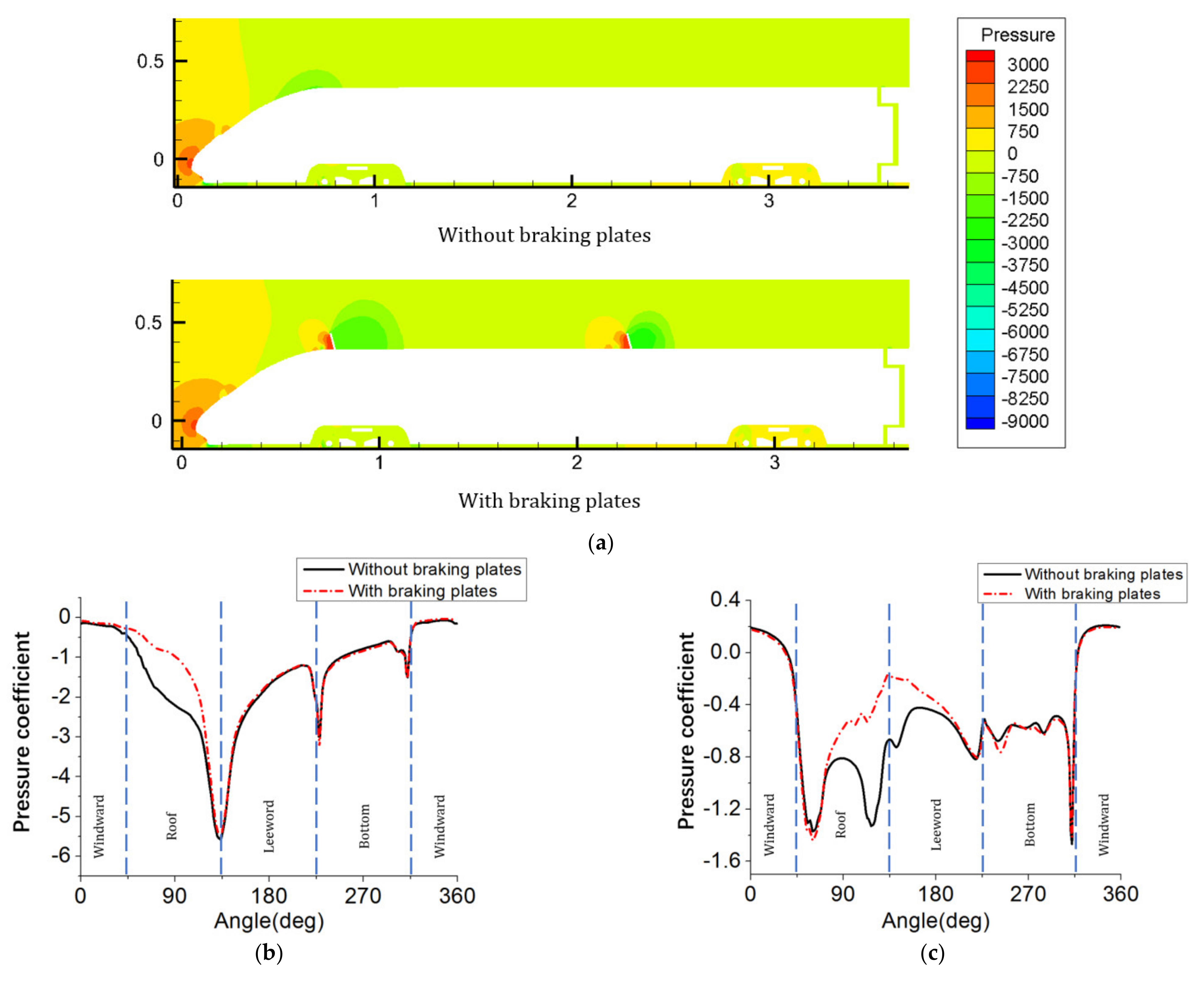
4.2. Comparison in Aerodynamic Characteristics
5. Conclusions
- The braking plate will not only change the drag force, but also significantly change the side and lift force when the train is running under a crosswind. Therefore, the influence of the braking plate on the aerodynamic force of the train should also be taken into account when designing and arranging it.
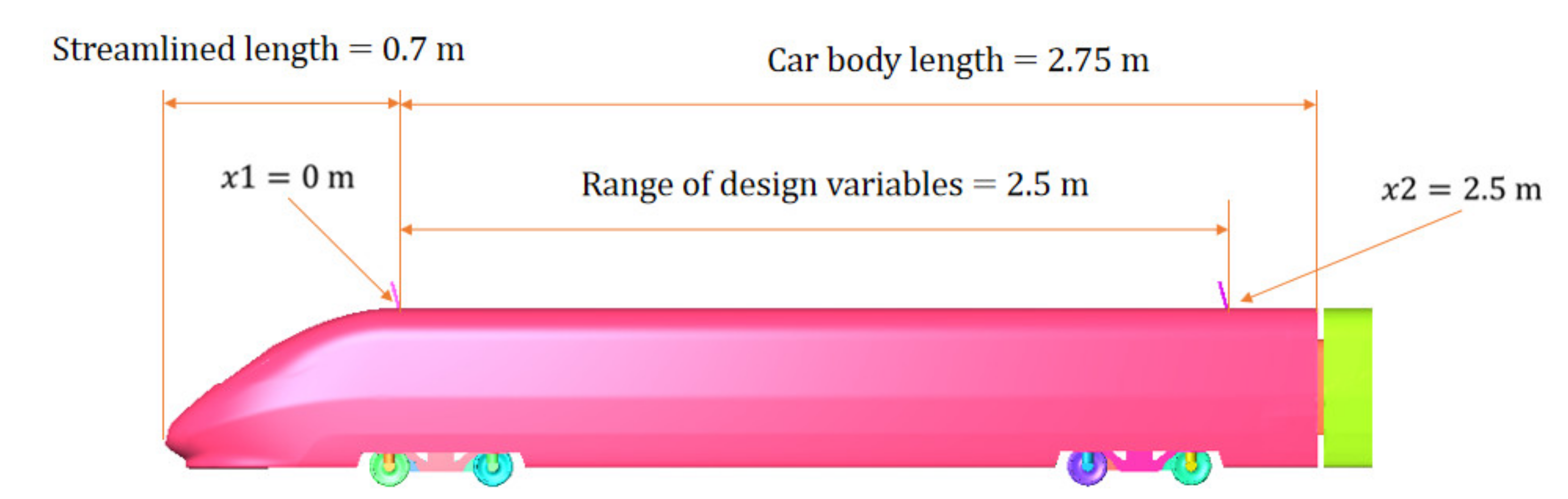
- The installation positions of the braking plate will also significantly affect the aerodynamic force of the head car. When the positions of the two braking plates are very close to each other, the drag increase will be suppressed. When the first braking plate is located near the end of the streamlined shape, the drag force of the head car is often relatively large, but if both braking plates are close to the car’s head, the lift force may increase. When the second plate is located at the rear of the vehicle body, the side force may increase. Therefore, we recommend that the first braking plate be placed at the end of the streamlined shape, and the second braking plate be placed at the middle of the car body.
- The braking plate has a huge influence on the pressure coefficient of the leeward side and the upper side of the head car, especially the upper side. The braking plate has little effect on the pressure coefficient at the bottom of the train and has almost no effect on the windward side.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Tian, H. Review of research on high-speed railway aerodynamics in China. Trans. Saf. Environ. 2019, 1, 1–21. [Google Scholar]
- Sawada, K. Development of magnetically levitated high speed transport system in Japan. IEEE Trans. Magn. 1996, 32, 2230–2235. [Google Scholar] [CrossRef]
- Yoshimura, M.; Saito, S.; Hosaka, S.; Tsunoda, H. Characteristics of the aerodynamic brake of the vehicle on the Yamanashi Maglev test line. Q. Rep. RTRI 2000, 41, 74–78. [Google Scholar] [CrossRef]
- Zuo, J.Y.; Wu, M.L.; Tian, C. Aerodynamic braking device for high-speed trains: Design, simulation and experiment. Proc. Inst. Mech. Eng. Part F J. Rail Rapid Transit 2014, 228, 260–270. [Google Scholar]
- Lee, M.; Bhandari, B. The application of aerodynamic brake for high-speed trains. J. Mech. Sci. Technol. 2018, 32, 5749–5754. [Google Scholar] [CrossRef]
- Puharić, M.; Matić, D.; Linić, S.; Ristic, S.; Lucanin, V. Determination of braking force on the aerodynamic brake by numerical simulations. FME Trans. 2014, 42, 106–111. [Google Scholar] [CrossRef] [Green Version]
- Wu, M.L.; Zhu, Y.Y.; Tian, C.; Fei, W.W. Influence of aerodynamic braking on the pressure wave of a crossing high-speed train. J. Zhejiang Univ. Sci. A 2011, 12, 979–984. [Google Scholar] [CrossRef]
- Gao, L.; Xi, Y.; Wang, G.; Wang, G.; Zhang, P.; Zuo, J. Opening Angle rules of the Aerodynamic Brake Panel. J. Donghua Univ. 2016, 33, 20–24. [Google Scholar]
- Niu, J.Q.; Wang, Y.M.; Wu, D.; Liu, F. Comparison of different configurations of aerodynamic braking plate on the flow around a high-speed train. Eng. Appl. Comp. Fluid Mech. 2020, 14, 655–668. [Google Scholar] [CrossRef]
- Niu, J.Q.; Wang, Y.M.; Liu, F.; Chen, Z. Comparative study on the effect of aerodynamic braking plates mounted at the inter-carriage region of a high-speed train with pantograph and air-conditioning unit for enhanced braking. J. Wind Eng. Ind. Aerodyn. 2020, 206, 104360. [Google Scholar] [CrossRef]
- Tian, C.; Wu, M.L.; Zhu, Y.Y.; Chen, M.T. Running Safety of High-speed Train Equipped with Aerodynamic Brake under Cross Wind. In Proceedings of the 2nd International Conference on Energy, Environment and Sustainable Development, Jilin, China, 12–14 October 2012. [Google Scholar]
- Zhai, Y.J.; Niu, J.Q.; Wang, Y.M. Unsteady flow and aerodynamic behavior of high-speed train braking plates with and without crosswinds. J. Wind Eng. Ind. Aerodyn. 2020, 206, 104309. [Google Scholar] [CrossRef]
- Chen, Z.W.; Liu, T.H.; Yan, C.G.; Yu, M.; Guo, Z.J.; Wang, T.T. Numerical simulation and comparison of the slipstreams of trains with different nose lengths under crosswind. J. Wind Eng. Ind. Aerodyn. 2019, 190, 256–272. [Google Scholar]
- Munoz-Paniagua, J.; Garcia, J.; Lehugeur, B. Evaluation of RANS, SAS and IDDES models for the simulation of the flow around a high-speed train subjected to crosswind. J. Wind Eng. Ind. Aerodyn. 2017, 171, 50–66. [Google Scholar]
- Zhang, J.; He, K.; Xiong, X.; Wang, J.; Gao, G. Numerical Simulation with a DES Approach for a High-Speed Train Subjected to the Crosswind. J. Appl. Fluid Mech. 2017, 10, 1329–1342. [Google Scholar]
- Premoli, A.; Rocchi, D.; Schito, P.; Tomasini, G. Comparison between steady and moving railway vehicles subjected to crosswind by CFD analysis. J. Wind Eng. Ind. Aerodyn. 2016, 156, 29–40. [Google Scholar]
- Guo, Z.J.; Liu, T.H.; Yu, M.; Chen, Z.; Li, W.; Huo, X.; Liu, H. Numerical study for the aerodynamic performance of double unit train under crosswind. J. Wind Eng. Ind. Aerodyn. 2019, 191, 203–214. [Google Scholar] [CrossRef]
- Liu, D.R.; Wang, T.T.; Liang, X.F.; Meng, S.; Zhong, M.; Lu, Z. High-speed train overturning safety under varying wind speed conditions. J. Wind Eng. Ind. Aerodyn. 2020, 198, 104111. [Google Scholar] [CrossRef]
- Yang, W.C.; Deng, E.; Zhu, Z.H.; Lei, M.; Shi, C.; He, H. Sudden Variation Effect of Aerodynamic Loads and Safety Analysis of Running Trains When Entering Tunnel under Crosswind. Appl. Sci. 2020, 10, 1445. [Google Scholar]
- Montenegro, P.A.; Calcada, R.; Carvalho, H. Stability of a train running over the Volga river high-speed railway bridge during crosswinds. Struct. Infrastruct. Eng. 2020, 16, 1121–1137. [Google Scholar]
- Yang, W.C.; Deng, E.; Lei, M.F.; Zhu, Z.H.; Zhang, P.P. Transient aerodynamic performance of high-speed trains when passing through two windproof facilities under crosswinds: A comparative study. Eng. Struct. 2019, 188, 729–744. [Google Scholar]
- Liu, T.H.; Chen, Z.W.; Zhou, X.S.; Zhang, J. A CFD analysis of the aerodynamics of a high-speed train passing through a windbreak transition under crosswind. Eng. Appl. Comp. Fluid Mech. 2018, 12, 137–151. [Google Scholar] [CrossRef] [Green Version]
- Noguchi, Y.; Suzuki, M.; Baker, C.; Nakade, K. Numerical and experimental study on the aerodynamic force coefficients of railway vehicles on an embankment in crosswind. J. Wind Eng. Ind. Aerodyn. 2019, 184, 90–105. [Google Scholar] [CrossRef]
- Jones, D.R.; Schonlau, M.; Welch, W.J. Efficient Global Optimization of Expensive Black-Box Functions. J. Glob. Optim. 1998, 13, 455–492. [Google Scholar] [CrossRef]
- Hoer, A.E.; Kennard, R.W. Ridge Regression: Biased Estimation for Nonorthogonal Problems. Technometrics 2000, 42, 80–86. [Google Scholar] [CrossRef]
- Li, T.; Li, M.; Wang, Z.; Zhang, J. Effect of the inter-car gap length on the aerodynamic characteristics of a high-speed train. Proc. Inst. Mech. Eng. Part F J. Rail Rapid Transit 2019, 233, 448–465. [Google Scholar] [CrossRef]
- Li, T.; Hemida, H.; Zhang, J.Y.; Rashidi, M.; Flynn, D. Comparisons of shear stress transport and detached eddy simulations of the flow around trains. J. Fluid Eng. 2018, 140, 111108. [Google Scholar] [CrossRef]
- García, J.; Crespo, A.; Berasarte, A.; Goikoetxea, J. Study of the flow between the train underbody and the ballast track. J. Wind Eng. Ind. Aerodyn. 2011, 99, 90–105. [Google Scholar] [CrossRef]
- Chiu, T.W.; Squire, L.C. An experimental-study of the flow over a train in a crosswind at large yaw angles up to 90-degress. J. Wind Eng. Ind. Aerodyn. 1992, 45, 47–74. [Google Scholar] [CrossRef]
- Jiang, H.B.; Li, Y.R.; Cheng, Z.Q. Relations of lift and drag coefficients of flow around flat plate. In Proceedings of the International Conference on Experimental and Applied Mechanics, Miami, FL, USA, 20–21 January 2014. [Google Scholar] [CrossRef]
- Munoz-Paniagua, J.; García, J. Aerodynamic surrogate-based optimization of the nose shape of a high-speed train for crosswind and passing-by scenarios. J. Wind Eng. Ind. Aerodyn. 2019, 187, 139–152. [Google Scholar] [CrossRef]
- Montoya, M.C.; Nieto, F.; Hernandez, S.; Kusano, I.; Álvarez, A.J.; Jurado, J.Á. CFD-based aeroelastic characterization of streamlined bridge deck cross-sections subject to shape modifications using surrogate models. J. Wind Eng. Ind. Aerodyn. 2018, 177, 405–428. [Google Scholar] [CrossRef]
- Helton, J.C.; Davis, F.J. Latin hypercube sampling and the propagation of uncertainty in analyses of complex systems. Reliab. Eng. Syst. Saf. 2003, 81, 23–69. [Google Scholar] [CrossRef] [Green Version]
- Vehtari, A.; Gelman, A.; Gabry, J. Practical Bayesian model evaluation using leave-one-out cross-validation and WAIC. Stat. Comput. 2017, 2, 1413–1432. [Google Scholar] [CrossRef] [Green Version]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Item | Number of Grids | Cd (Head) | Cl (Head) |
|---|---|---|---|
| EXP | - | 0.177 | −0.062 |
| M1 | 16 million | 0.190 | −0.011 |
| M2 | 20 million | 0.186 | −0.039 |
| M3 | 46 million | 0.185 | −0.036 |
| Item | Cd (Head) | Cl (Head) |
|---|---|---|
| EXP | 0.177 | −0.062 |
| SA | 0.216 | −0.037 |
| k-ε | 0.252 | −0.125 |
| k-ω SST | 0.186 | −0.039 |
| Item | Cd | Cl |
|---|---|---|
| Simulation values | 1.948 | 0.5179 |
| EXP | 1.866 | 0.5 |
| Error of Drag Force | Error of Lift Force | Error of Side Force |
|---|---|---|
| 2.474% | 2.944% | 0.791% |
| Item | Cd | Cl | Cs |
|---|---|---|---|
| Without braking plates | 0.231 | 0.805 | 1.346 |
| With braking plates | 0.429 | 0.866 | 1.267 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, L.; Li, T.; Zhang, J. Effect of Braking Plates on the Aerodynamic Behaviors of a High-Speed Train Subjected to Crosswinds. Energies 2021, 14, 401. https://doi.org/10.3390/en14020401
Zhang L, Li T, Zhang J. Effect of Braking Plates on the Aerodynamic Behaviors of a High-Speed Train Subjected to Crosswinds. Energies. 2021; 14(2):401. https://doi.org/10.3390/en14020401
Chicago/Turabian StyleZhang, Le, Tian Li, and Jiye Zhang. 2021. "Effect of Braking Plates on the Aerodynamic Behaviors of a High-Speed Train Subjected to Crosswinds" Energies 14, no. 2: 401. https://doi.org/10.3390/en14020401
APA StyleZhang, L., Li, T., & Zhang, J. (2021). Effect of Braking Plates on the Aerodynamic Behaviors of a High-Speed Train Subjected to Crosswinds. Energies, 14(2), 401. https://doi.org/10.3390/en14020401