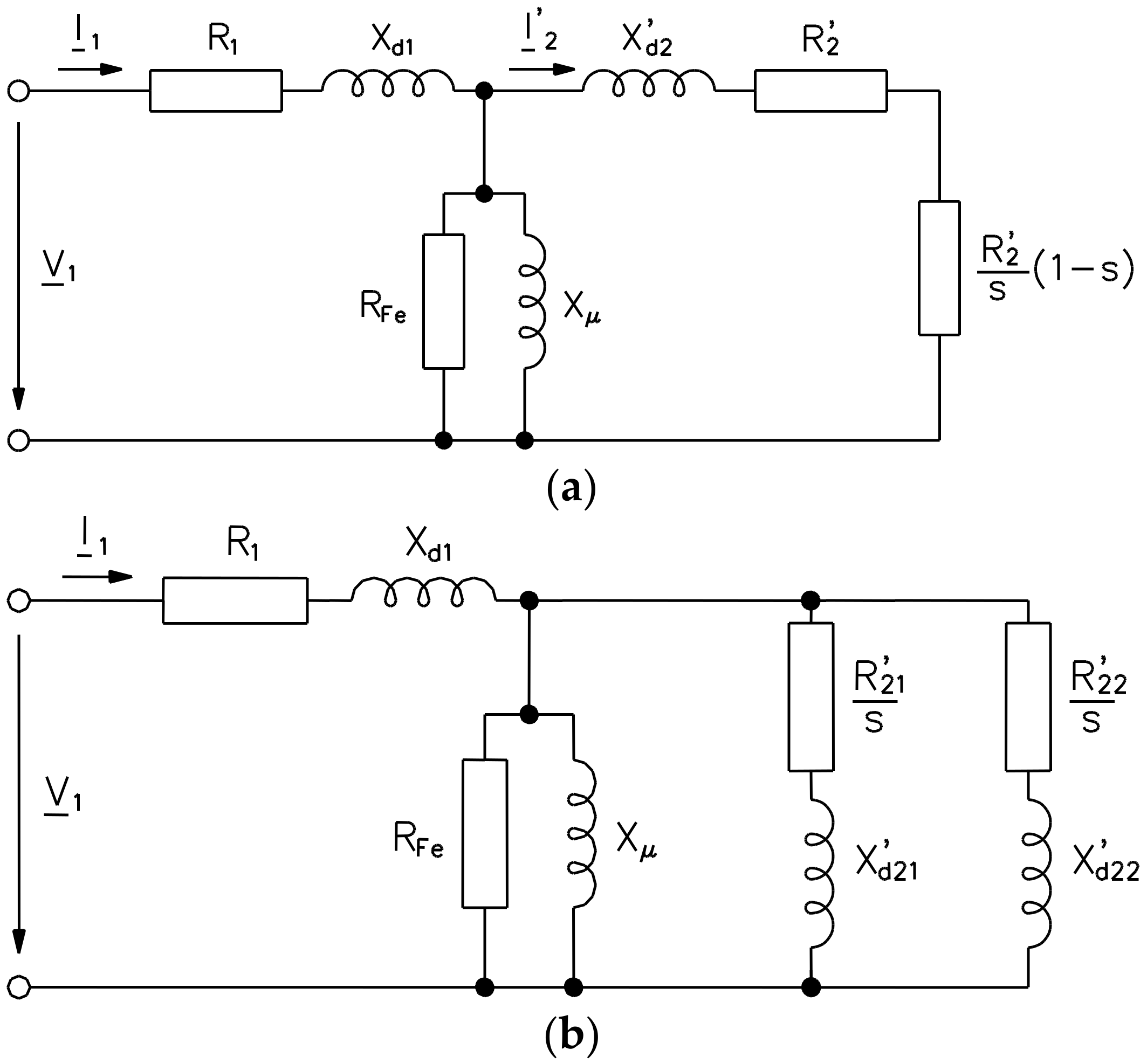
Figure 1.
Equivalent circuits for induction motors. (a) Single cage, (b) Double cage.
Figure 1.
Equivalent circuits for induction motors. (a) Single cage, (b) Double cage.
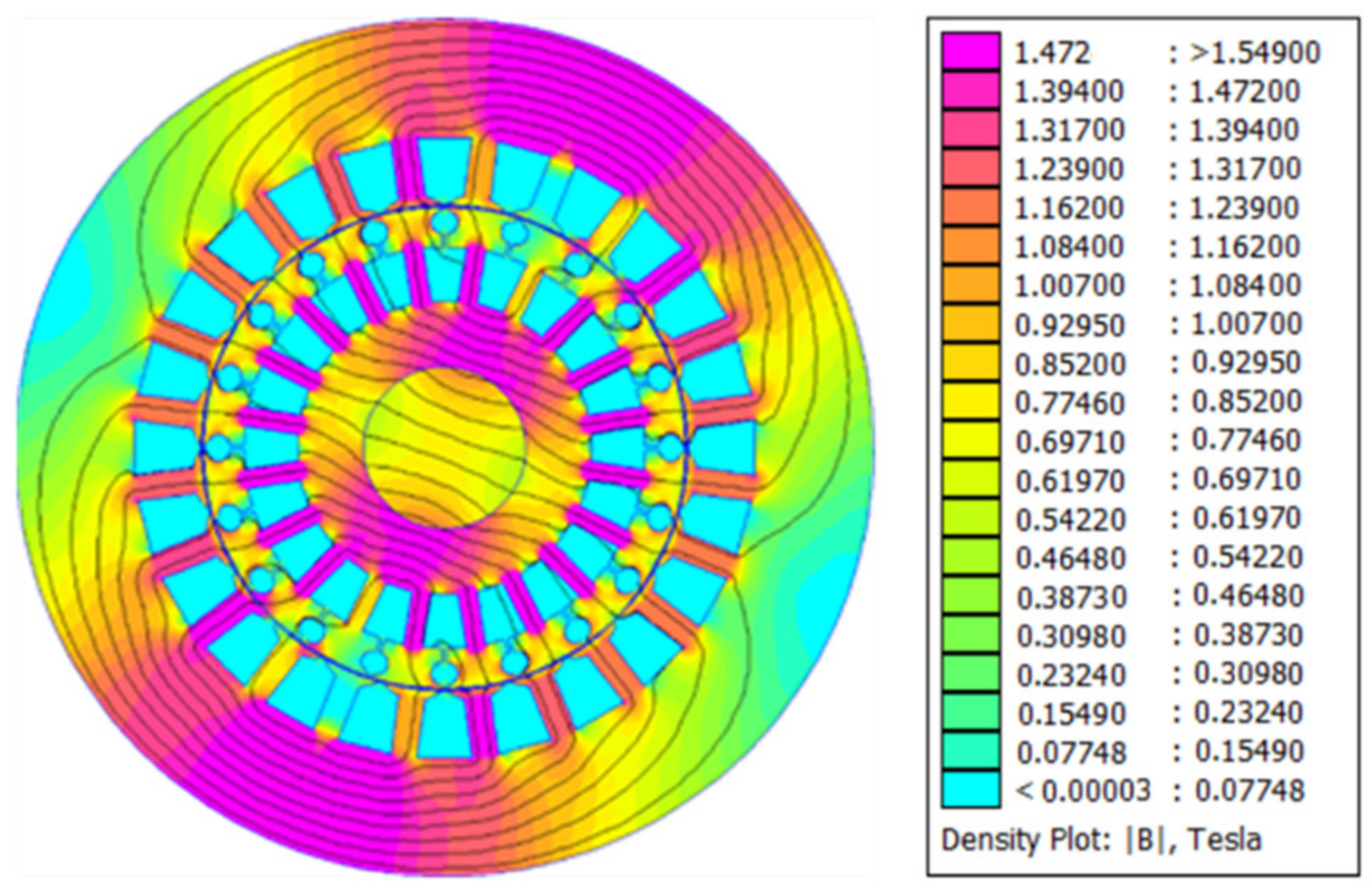
Figure 2.
Finite elements method simulation: results in the 7.5 kW motor.
Figure 2.
Finite elements method simulation: results in the 7.5 kW motor.
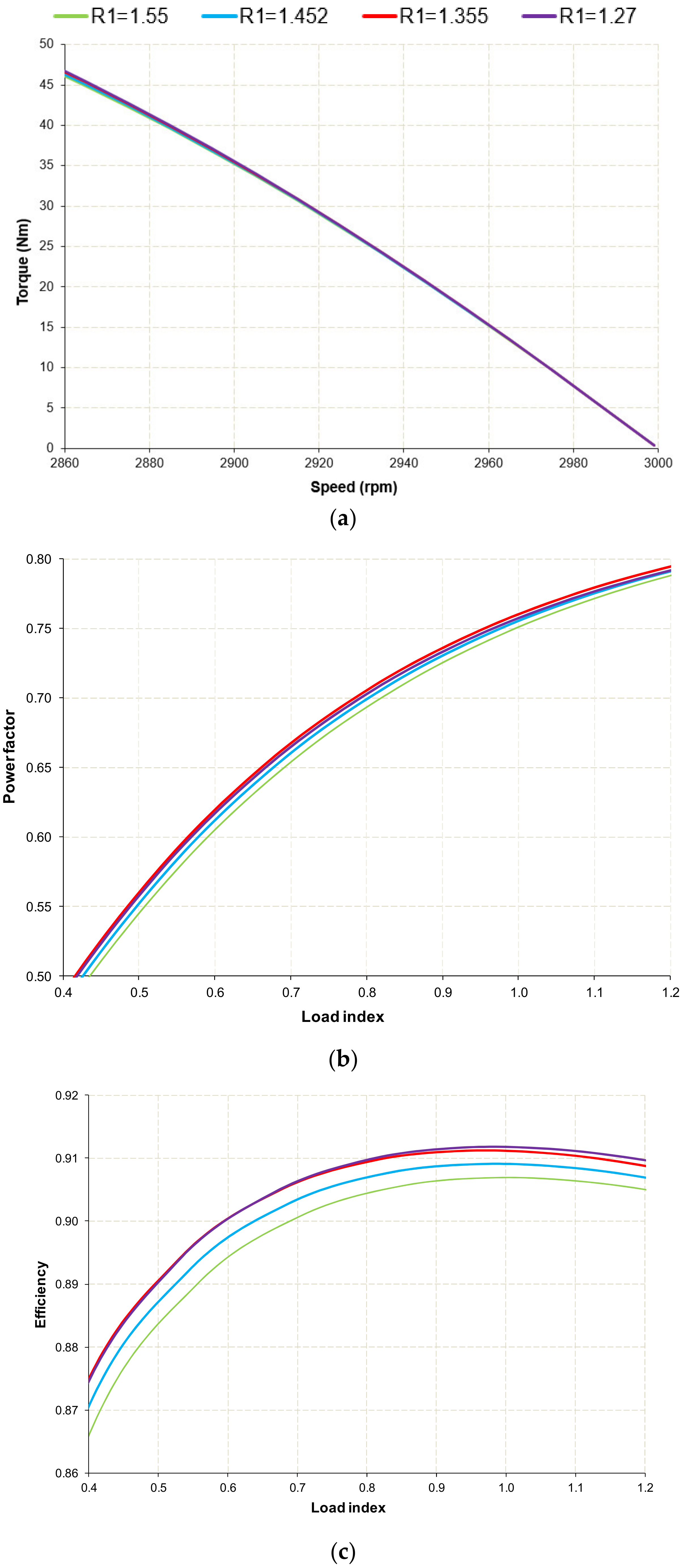
Figure 3.
Characteristic curves in the 7.5 kW motor (variations of R1 in Ω). (a) Torque-speed (stability zone); (b) Power factor-load index; (c) Efficiency-load index.
Figure 3.
Characteristic curves in the 7.5 kW motor (variations of R1 in Ω). (a) Torque-speed (stability zone); (b) Power factor-load index; (c) Efficiency-load index.
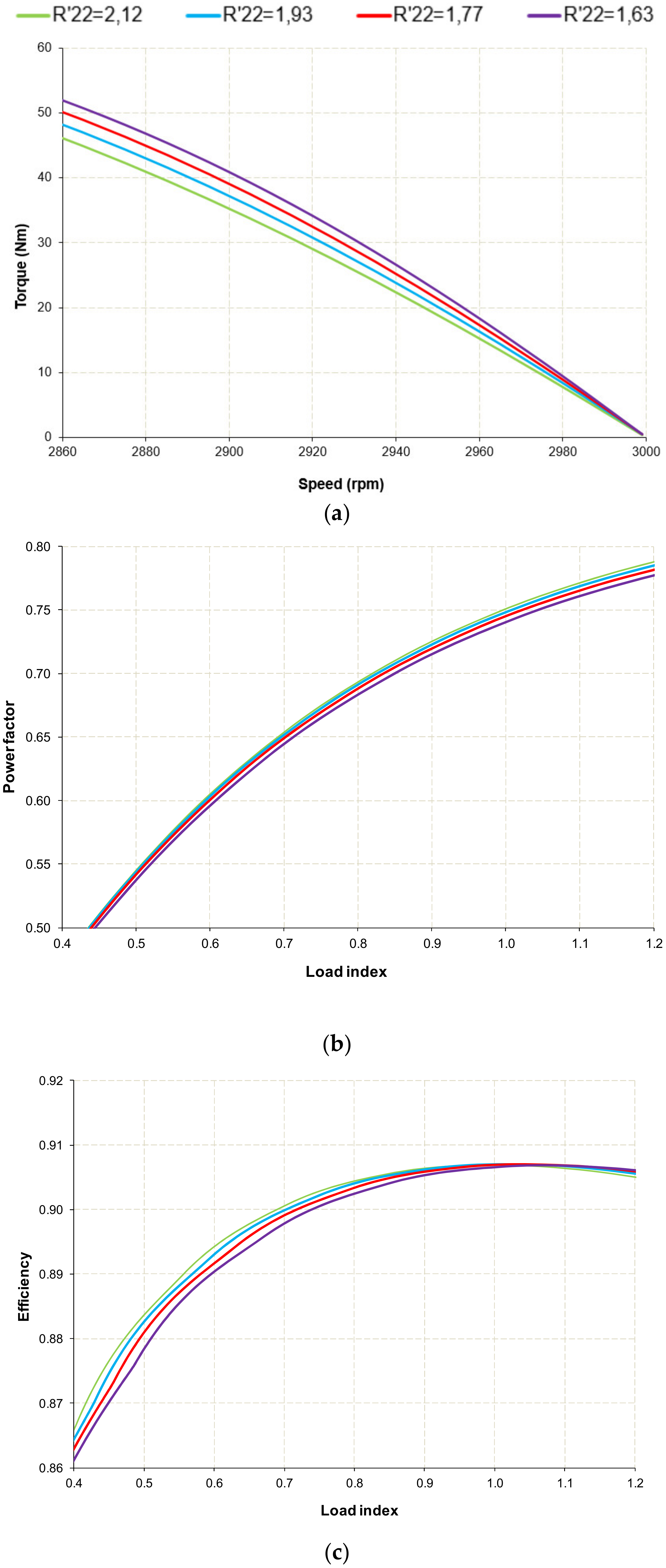
Figure 4.
Characteristic curves in the 7.5 kW motor (variations of R′22 in Ω). (a) Torque-speed (stability zone), (b) Power factor-load index, (c) Efficiency-load index.
Figure 4.
Characteristic curves in the 7.5 kW motor (variations of R′22 in Ω). (a) Torque-speed (stability zone), (b) Power factor-load index, (c) Efficiency-load index.
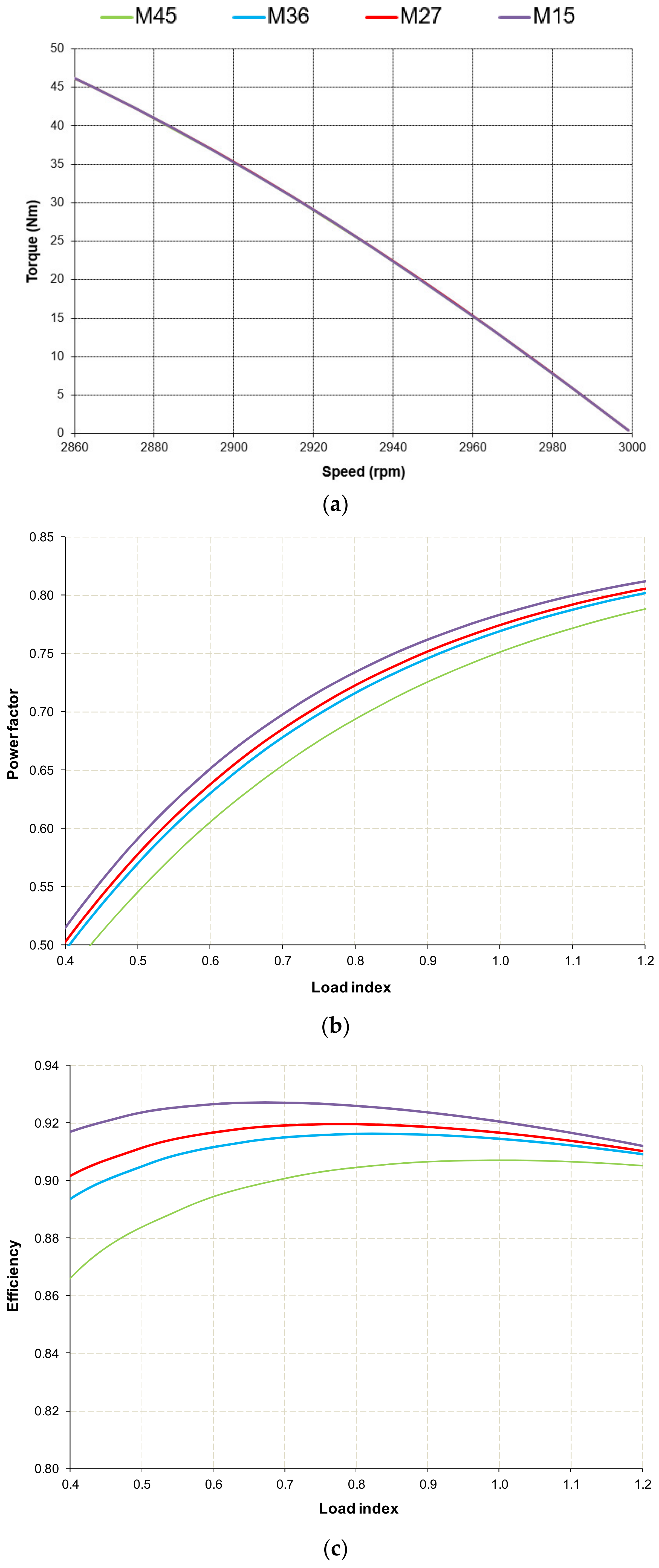
Figure 5.
Characteristic curves in the 7.5 kW motor (variations of type of steel). (a) Torque-speed (stability zone), (b) Power factor-load index, (c) Efficiency-load index.
Figure 5.
Characteristic curves in the 7.5 kW motor (variations of type of steel). (a) Torque-speed (stability zone), (b) Power factor-load index, (c) Efficiency-load index.
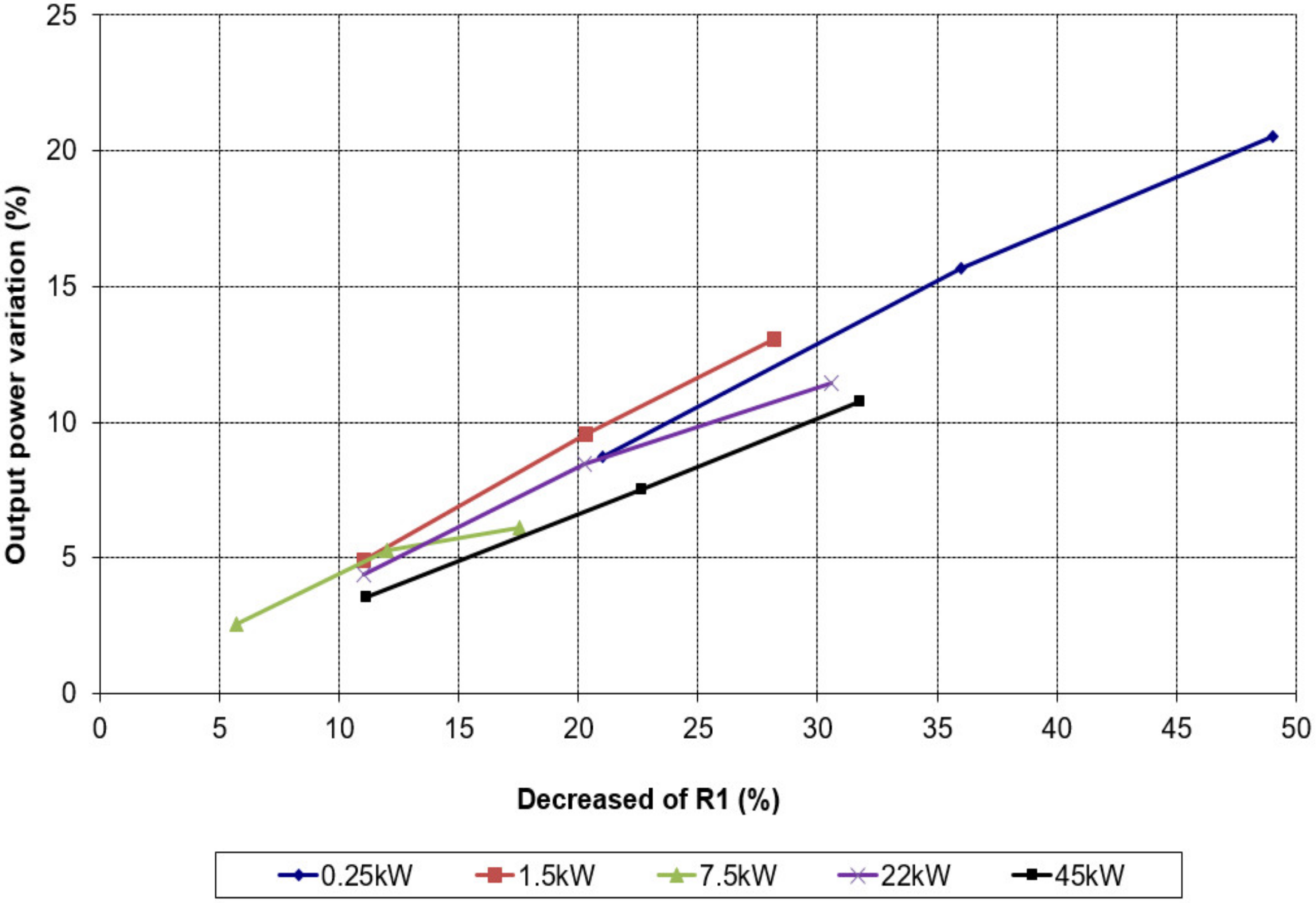
Figure 6.
Output power variation versus decreased of R1 in all the motors.
Figure 6.
Output power variation versus decreased of R1 in all the motors.
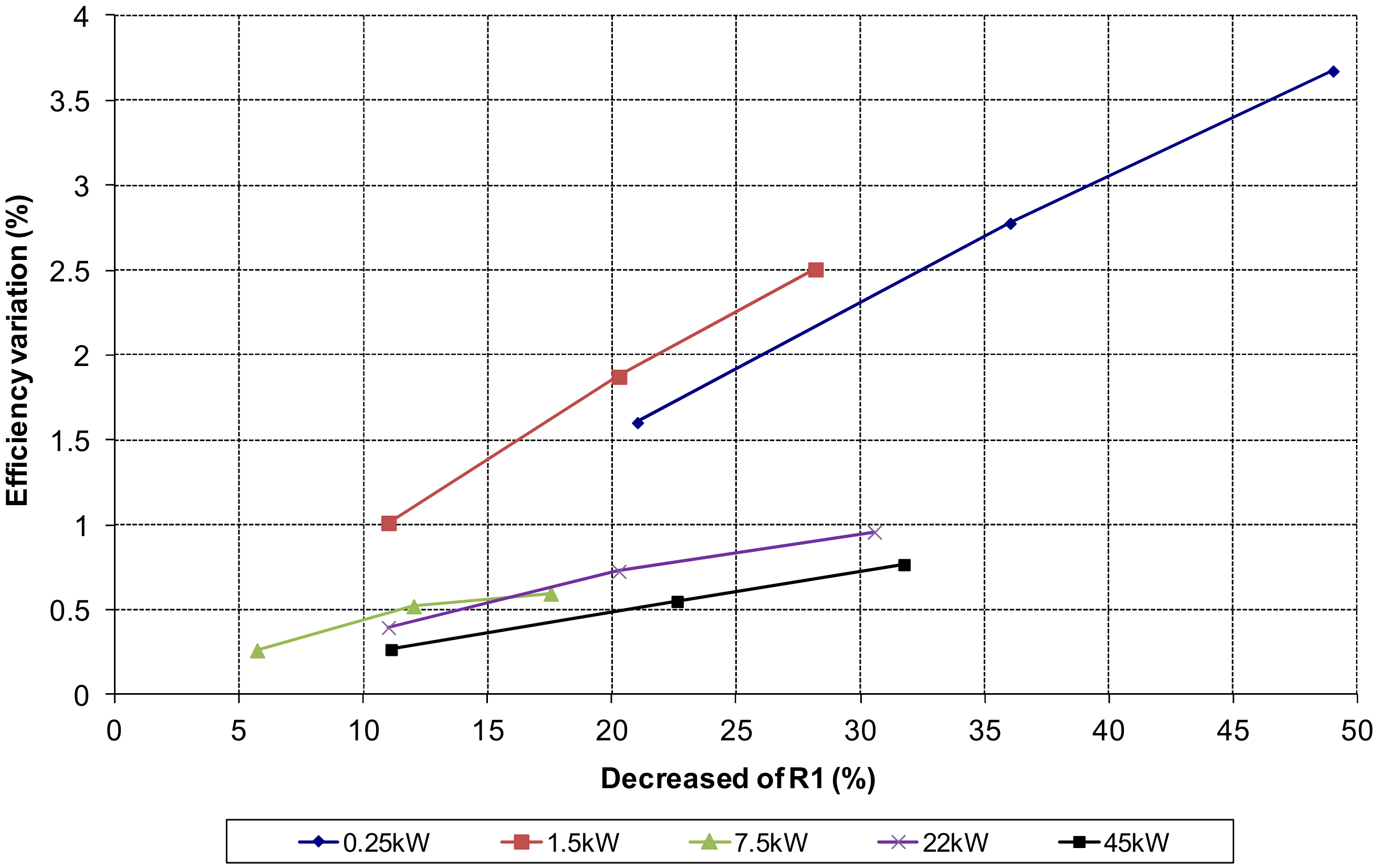
Figure 7.
Efficiency variation versus decreased of R1 in all the motors (equal heating criteria).
Figure 7.
Efficiency variation versus decreased of R1 in all the motors (equal heating criteria).
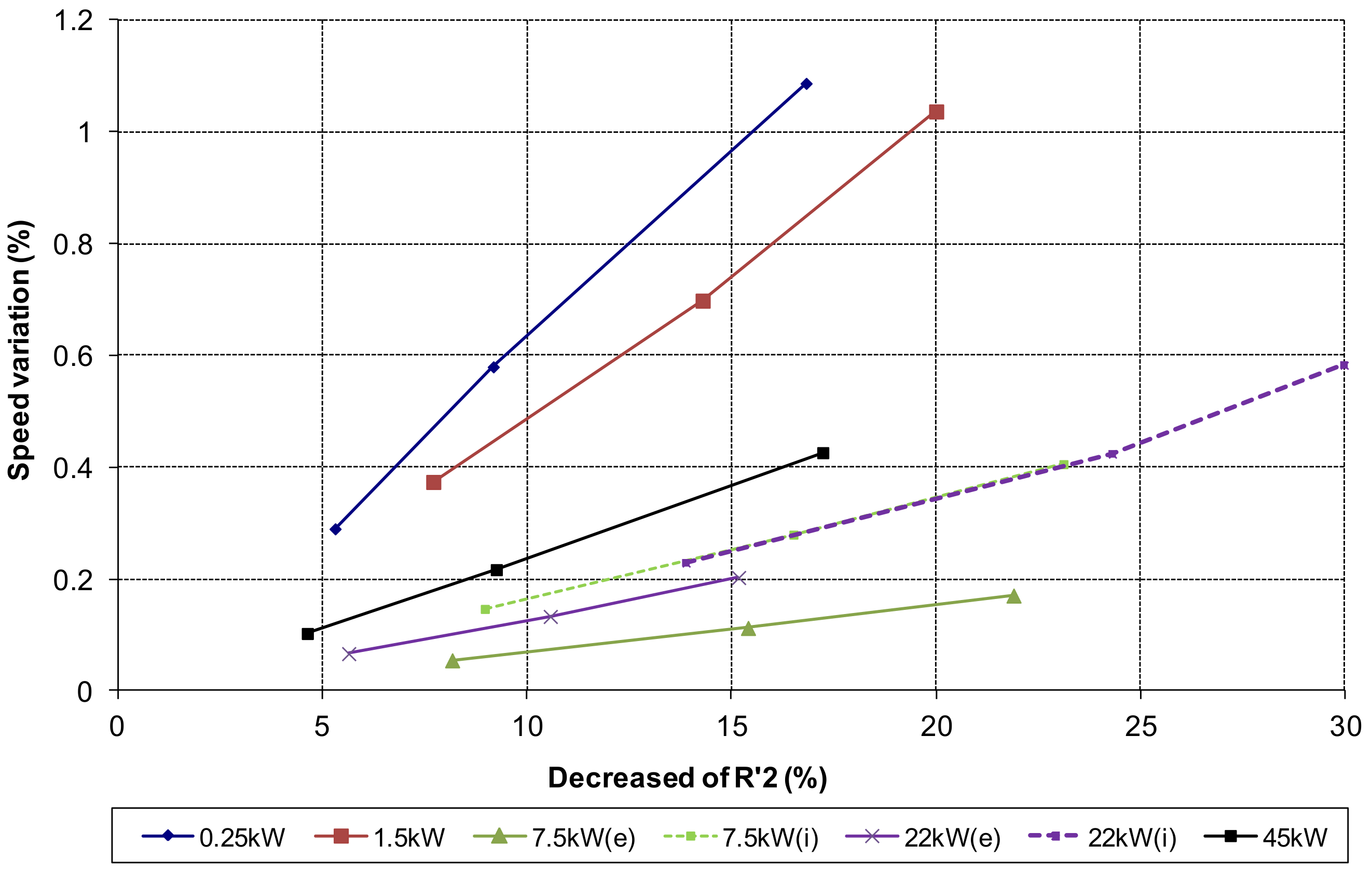
Figure 8.
Speed variation versus decreased of R′2 in all the motors (in the double cage motors, subscript e for external cage variation and subscript i for internal cage variation is used) (equal heating criteria).
Figure 8.
Speed variation versus decreased of R′2 in all the motors (in the double cage motors, subscript e for external cage variation and subscript i for internal cage variation is used) (equal heating criteria).
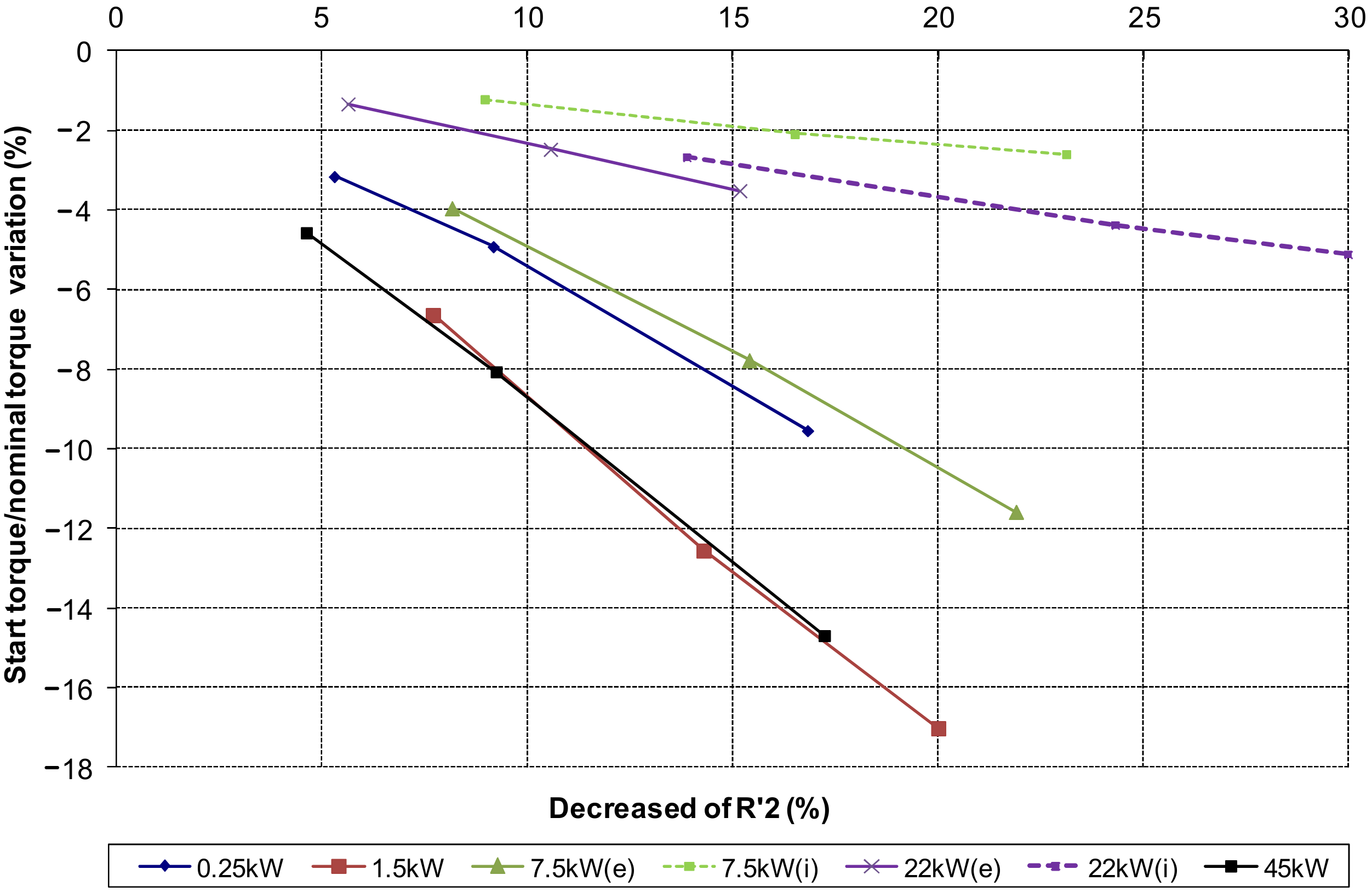
Figure 9.
Start torque/nominal torque variation versus decreased of R′2 in all the motors (in the double cage motors, subscript e for external cage variation and subscript i for internal cage variation is used).
Figure 9.
Start torque/nominal torque variation versus decreased of R′2 in all the motors (in the double cage motors, subscript e for external cage variation and subscript i for internal cage variation is used).
Figure 10.
Output power variation versus decreased of specific iron losses in all the motors.
Figure 10.
Output power variation versus decreased of specific iron losses in all the motors.
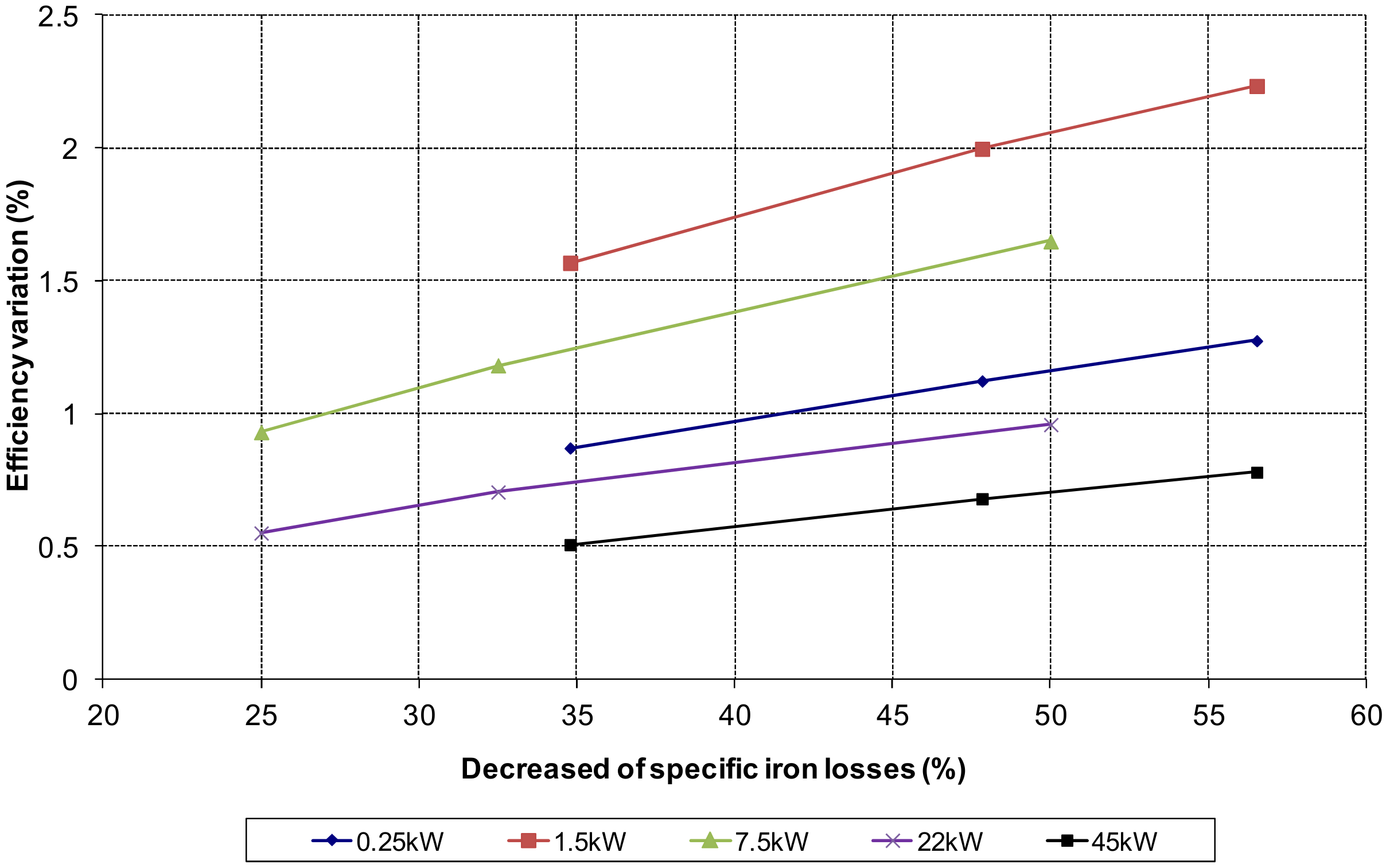
Figure 11.
Efficiency variation versus decreased of specific iron losses in all the motors (equal heating criteria).
Figure 11.
Efficiency variation versus decreased of specific iron losses in all the motors (equal heating criteria).
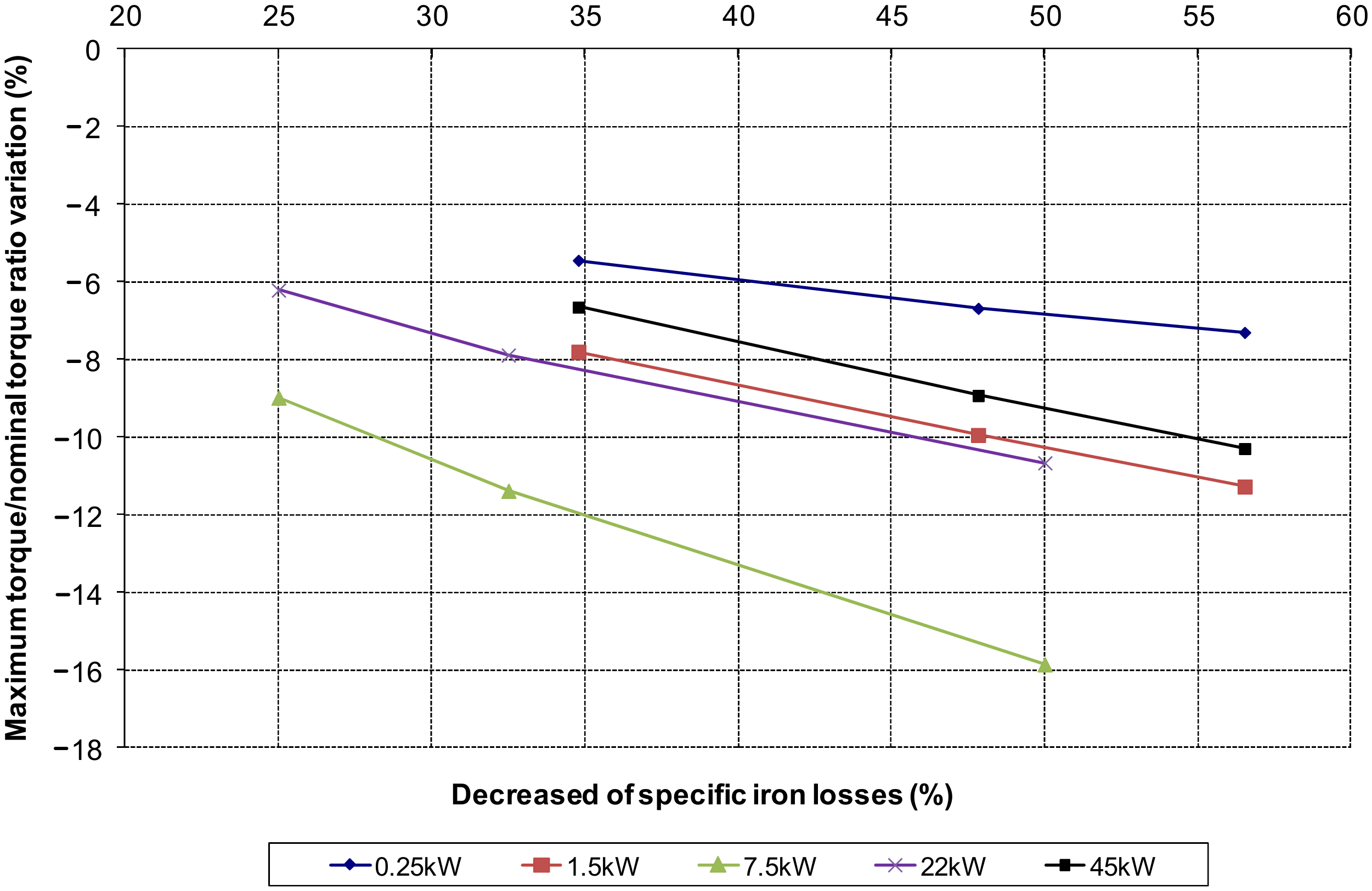
Figure 12.
Maximum torque/nominal torque variation versus decreased of specific iron losses in all the motors.
Figure 12.
Maximum torque/nominal torque variation versus decreased of specific iron losses in all the motors.
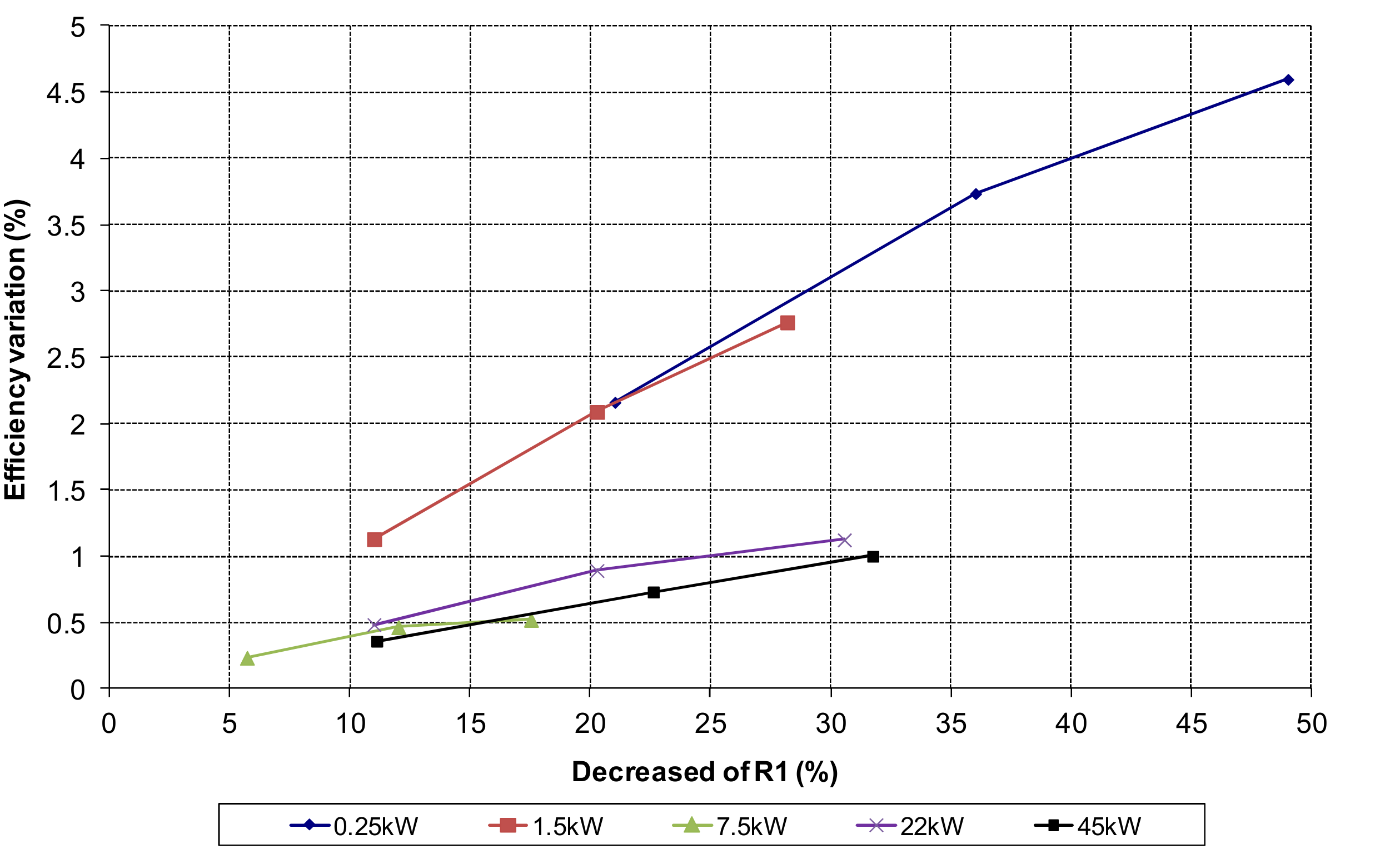
Figure 13.
Efficiency variation versus decreased of R1 in all the motors (equal output power criteria).
Figure 13.
Efficiency variation versus decreased of R1 in all the motors (equal output power criteria).
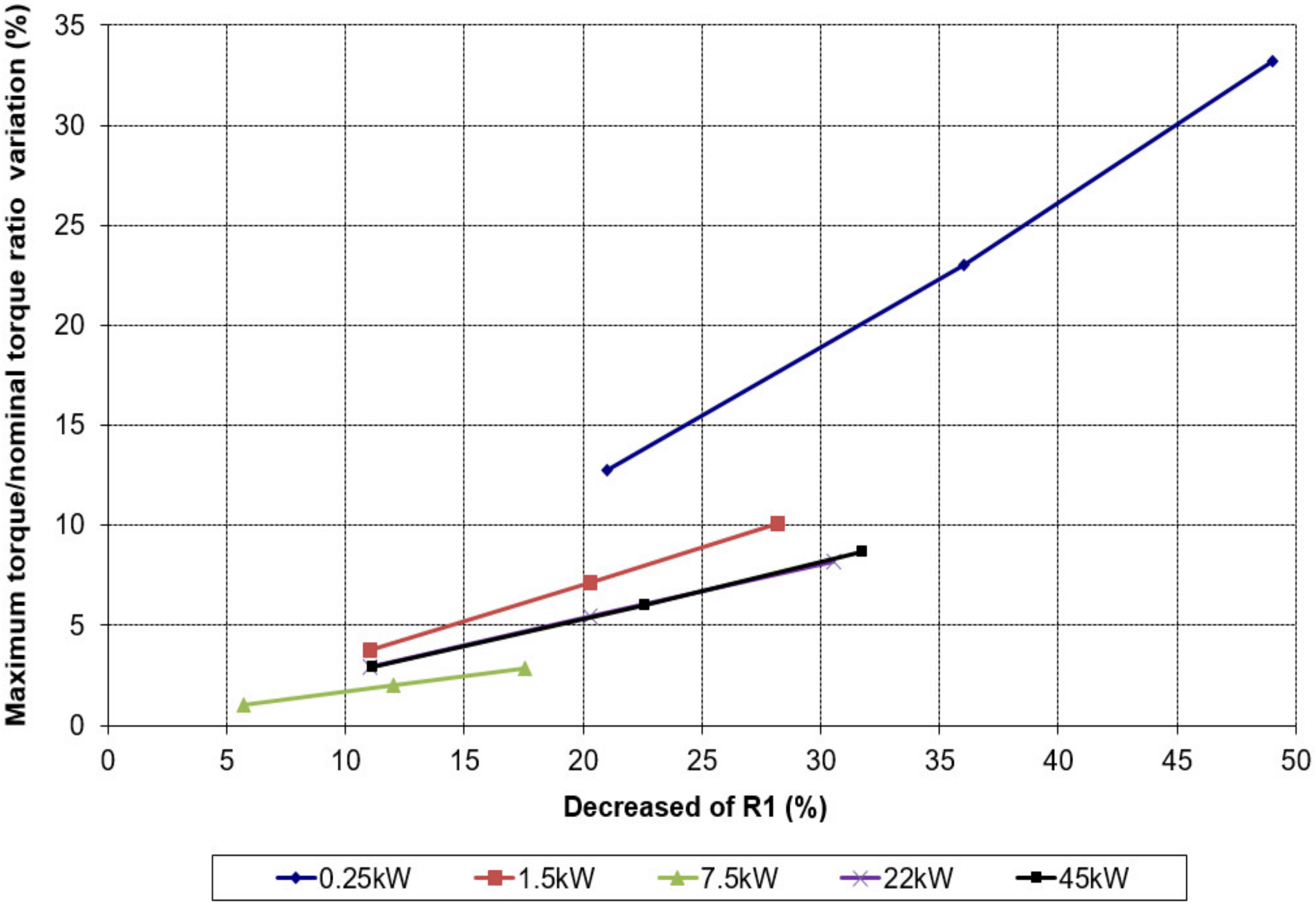
Figure 14.
Maximum torque/nominal torque variation versus decreased of R1 in all the motors.
Figure 14.
Maximum torque/nominal torque variation versus decreased of R1 in all the motors.
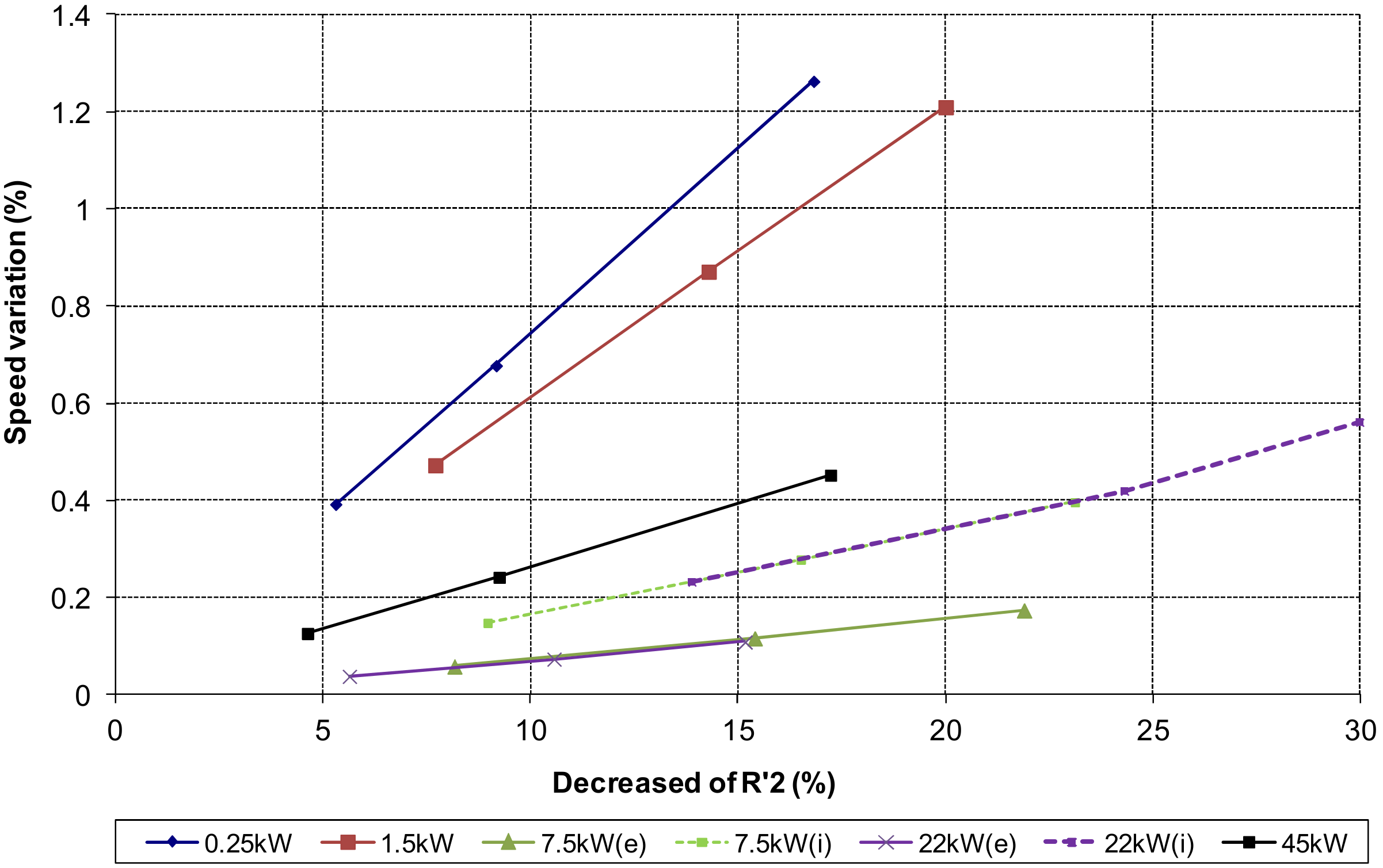
Figure 15.
Speed variation versus decreased of R′2 in all the motors (in the double cage motors, subscript e for external cage variation and subscript i for internal cage variation is used) (equal output power criteria).
Figure 15.
Speed variation versus decreased of R′2 in all the motors (in the double cage motors, subscript e for external cage variation and subscript i for internal cage variation is used) (equal output power criteria).
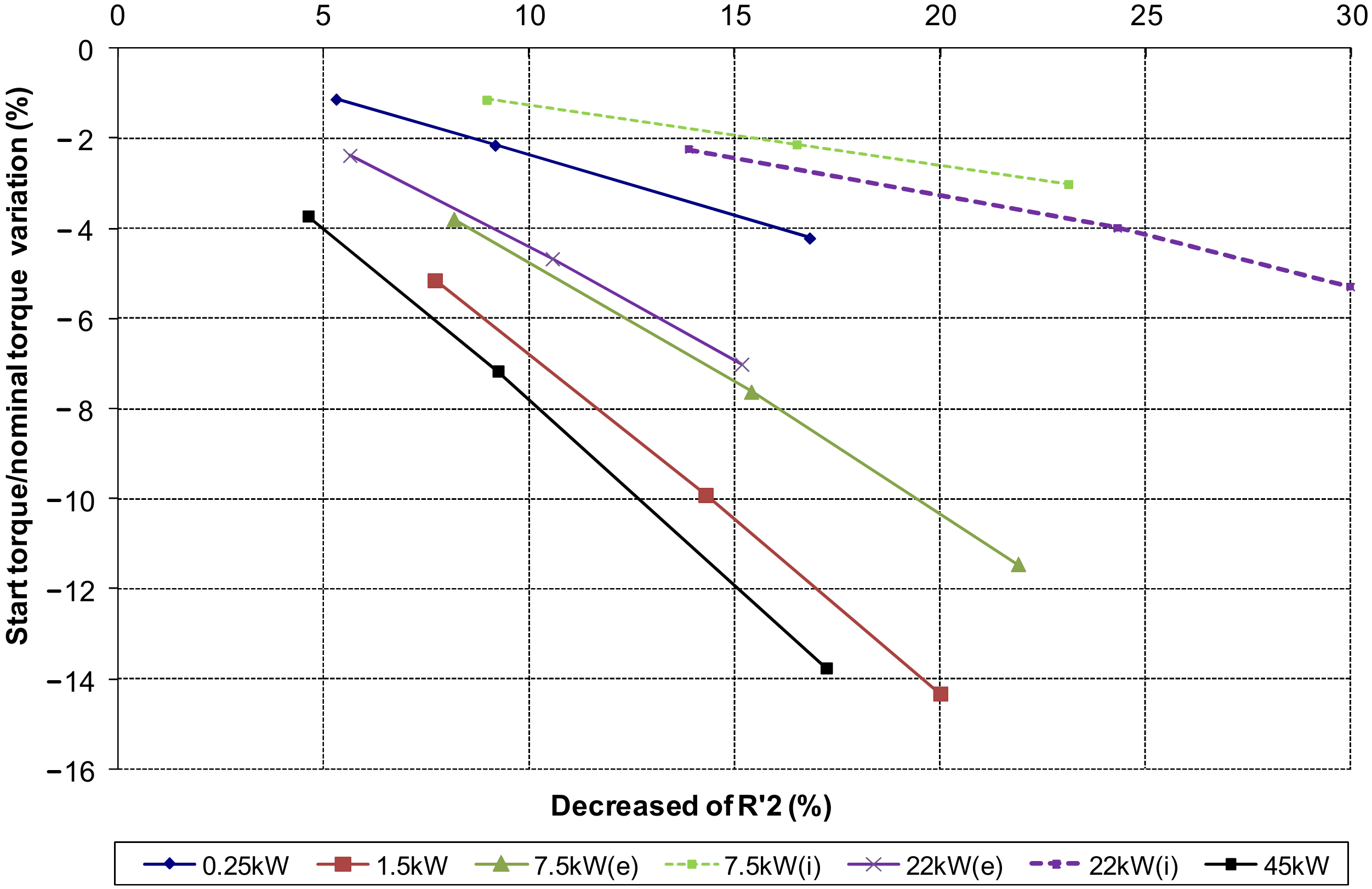
Figure 16.
Start torque/nominal torque versus decreased of R′2 in all the motors (in the double cage motors, subscript e for external cage variation and subscript i for internal cage variation is used).
Figure 16.
Start torque/nominal torque versus decreased of R′2 in all the motors (in the double cage motors, subscript e for external cage variation and subscript i for internal cage variation is used).
Figure 17.
Efficiency variation versus decreased of specific iron losses in all the motors (equal output power criteria).
Figure 17.
Efficiency variation versus decreased of specific iron losses in all the motors (equal output power criteria).
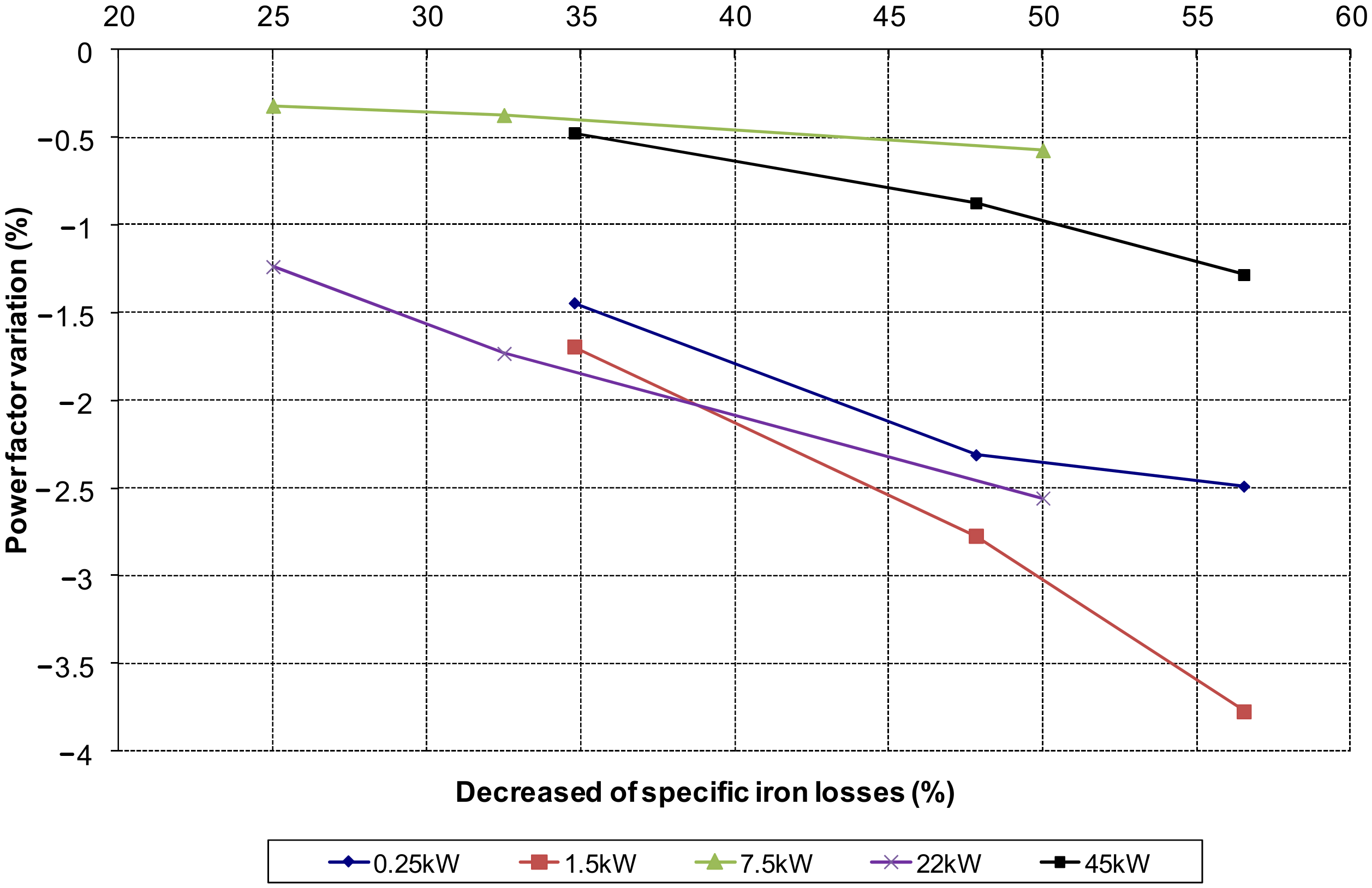
Figure 18.
Power factor variation versus decreased of specific iron losses in all the motors.
Figure 18.
Power factor variation versus decreased of specific iron losses in all the motors.
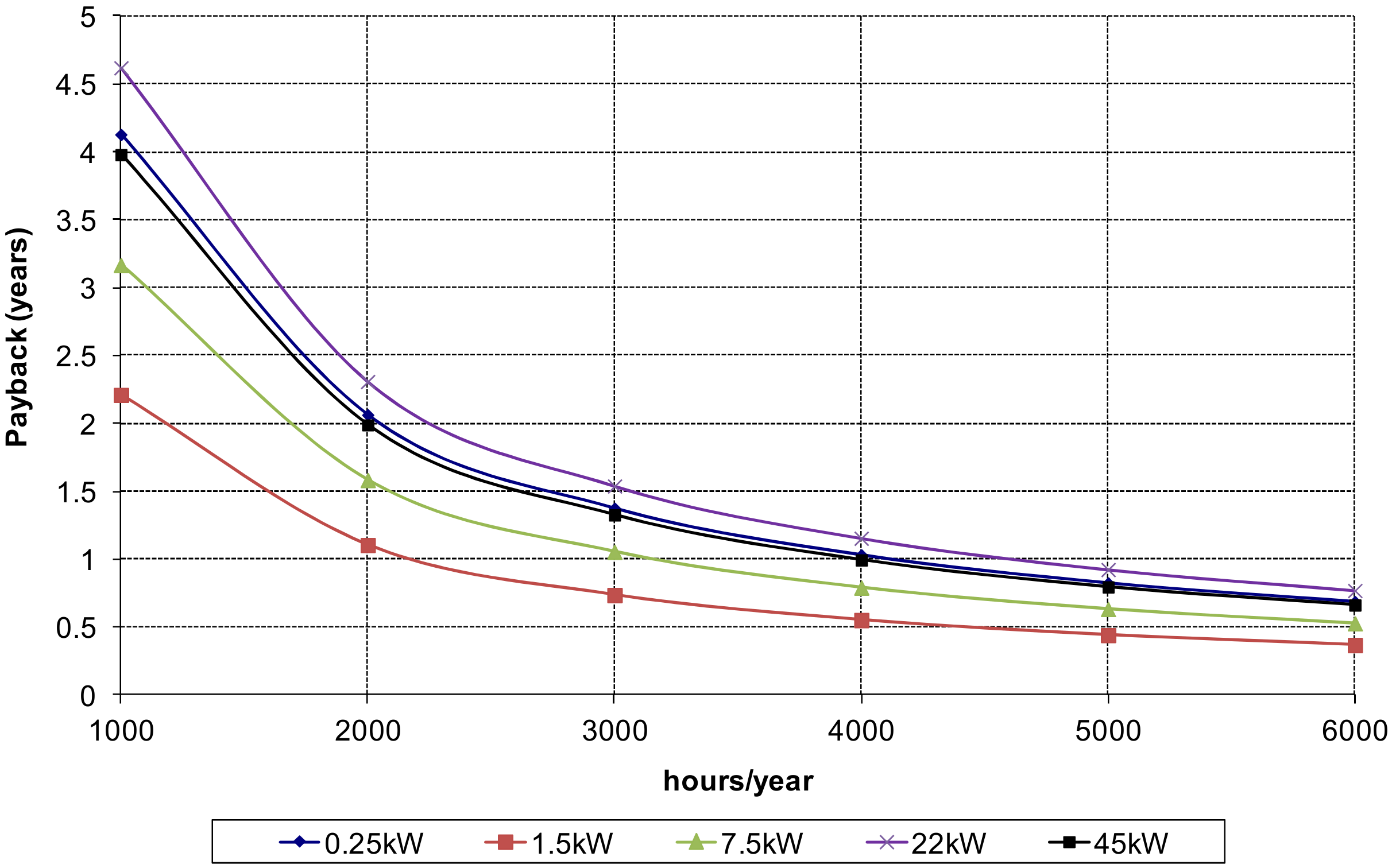
Figure 19.
Payback versus of the hours/year in all the motors.
Figure 19.
Payback versus of the hours/year in all the motors.
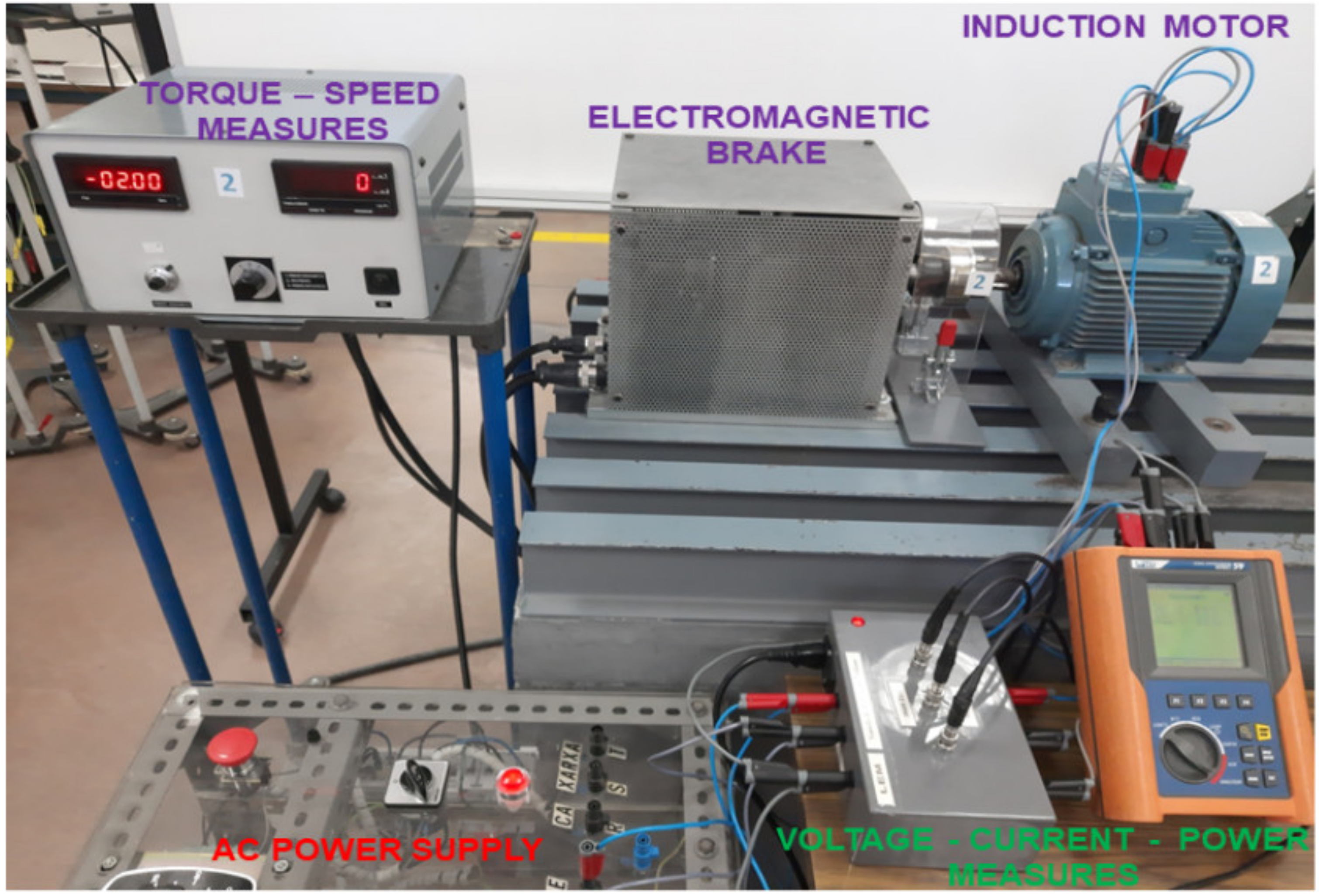
Figure A1.
Test bench performed in the laboratory.
Figure A1.
Test bench performed in the laboratory.
Table 1.
Nominal values of the induction motors.
Table 1.
Nominal values of the induction motors.
| | 0.25 kW | 1.5 kW | 7.5 kW | 22 kW | 45 kW |
|---|
| Voltage (V) | 415 | 230 | 450 | 400 | 400 |
| Current (A) | 0.7 | 6 | 14 | 41 | 81 |
| Speed (rpm) | 1380 | 1418 | 2924 | 2930 | 1462 |
| Poles number | 4 | 4 | 2 | 2 | 4 |
| Connection | star | delta | delta | delta | delta |
Table 2.
Main dimensions of the induction motors.
Table 2.
Main dimensions of the induction motors.
| | 0.25 kW | 1.5 kW | 7.5 kW | 22 kW | 45 kW |
|---|
| DS (mm) | 100.5 | 150 | 212 | 290 | 335 |
| DR (mm) | 55 | 88.4 | 119 | 180 | 220 |
| g (mm) | 0.25 | 0.35 | 0.5 | 0.6 | 0.9 |
| L (mm) | 58 | 100 | 125 | 215 | 260 |
| NS | 24 | 36 | 24 | 48 | 48 |
| NC | 230 | 56 | 52 | 14 | 15 |
| dc (mm) | 0.4 | 1 | 1.32 | 2.36 | 3 |
| AS (mm2) | 70.1 | 92.2 | 154 | 161 | 231 |
| NR | 17 | 28 | 20 | 40 | 38 |
| S or D | S | S | D | D | S |
| AR (mm2) | 30 | 42 | 24.6/78 | 25.5/70 | 169 |
| Steel | M47 | M45 | M45 | M36 | M36 |
Table 3.
Equivalent circuit parameters of the induction motors.
Table 3.
Equivalent circuit parameters of the induction motors.
| | 0.25 kW | 1.5 kW | 7.5 kW | 22 kW | 45 kW |
|---|
| R1 (Ω) | 28.4 | 4.58 | 1.55 | 0.61 | 0.25 |
| Xd1 (Ω) | 21.1 | 5.25 | 3.24 | 0.78 | 0.48 |
| R′2 (Ω) | 34.9 | 4.22 | | | 0.24 |
| X′d2 (Ω) | 22.8 | 7.82 | | | 0.45 |
| R′21 (Ω) | | | 5.39 | 1.42 | |
| X′d21 (Ω) | | | 6.98 | 1.74 | |
| R′22 (Ω) | | | 2.12 | 0.61 | |
| X′d22 (Ω) | | | 12.69 | 2.91 | |
| Xμ (Ω) | 549.4 | 95.87 | 92.1 | 36.07 | 25.83 |
| RFe (Ω) | 10,104 | 1234.6 | 1840 | 623 | 440 |
| Pfreg (W) | 8.5 | 23.7 | 42.3 | 211 | 249 |
Table 4.
Construction variations studied in the 7.5 kW motor.
Table 4.
Construction variations studied in the 7.5 kW motor.
| dc (mm) | 1.32 | 1.36 | 1.41 | 1.45 |
| R1 (Ω) | 1.55 | 1.452 | 1.355 | 1.27 |
| AS modified (*) | | no | no | yes |
| RFe (Ω) | 1840 | | | 1781 |
| Xµ (Ω) | 92.1 | | | 90.9 |
| AR external (mm2) | 24.6 | 26.78 | 29.07 | 31.5 |
| R′21 (Ω) | 5.39 | 4.95 | | 4.56 |
| RFe (Ω) | 1840 | 1813 | 1788 | 1763 |
| Xµ (Ω) | 92.1 | 91.7 | 91.3 | 90.9 |
| AR internal (mm2) | 78 | 85.67 | 93.4 | 101.4 |
| R′22 (Ω) | 2.12 | 1.93 | 1.77 | 1.63 |
| RFe (Ω) | 1840 | 1788 | 1738 | 1690 |
| Xµ (Ω) | 92.1 | 91.5 | 90.9 | 90.1 |
| Type of steel | M45 | M36 | M27 | M15 |
| EL (**) | 2 | 1.5 | 1.35 | 1 |
| RFe (Ω) | 1840 | 2489 | 2806 | 3844 |
| Xµ (Ω) | 92.1 | 92.3 | 92.5 | 92.7 |
Table 5.
Nominal, start, and maximum torque results on the 7.5 kW motor (equal heating criteria, variations of R1).
Table 5.
Nominal, start, and maximum torque results on the 7.5 kW motor (equal heating criteria, variations of R1).
| R1 (Ω) | 1.55 | | 1.452 | 1.355 | 1.27 |
|---|
| Output power (W) | 7504 | | 7696 | 7900 | 7963 |
| Speed (rpm) | 2924 | | 2922 | 2920 | 2919 |
| Power factor | 0.7514 | | 0.7558 | 0.7601 | 0.7578 |
| Efficiency | 0.8963 | | 0.8986 | 0.9009 | 0.9016 |
| Ts/Tn | 2.2435 | | 2.2069 | 2.1687 | 2.1672 |
| Is/In | 6.3391 | | 6.2601 | | 6.1767 |
| Tmax/Tn | 3.1755 | | 3.1251 | 3.0728 | 3.0723 |
Table 6.
Nominal, start, and maximum torque results on the 7.5 kW motor (equal output power criteria, variations of R1).
Table 6.
Nominal, start, and maximum torque results on the 7.5 kW motor (equal output power criteria, variations of R1).
| R1 (Ω) | 1.55 | 1.452 | 1.355 | 1.27 |
|---|
| Total losses (W) | 867 | 848 | 829 | 824 |
| Speed (rpm) | 2924 | 2924 | 2925 | 2925 |
| Power factor | 0.7514 | 0.7499 | 0.7486 | 0.7444 |
| Efficiency | 0.8963 | 0.8983 | 0.9004 | 0.9009 |
| Ts/Tn | 2.2435 | 2.2662 | 2.2873 | 2.3046 |
| Is/In | 6.3391 | 6.3746 | 6.4073 | 6.4038 |
| Tmax/Tn | 3.1755 | 3.2091 | 3.2408 | 3.2671 |
Table 7.
Nominal, start, and maximum torque results on the 7.5 kW motor (equal heating criteria, variations of R′22).
Table 7.
Nominal, start, and maximum torque results on the 7.5 kW motor (equal heating criteria, variations of R′22).
| R′22 (Ω) | 2.12 | 1.93 | 1.77 | 1.63 |
|---|
| Output power (W) | 7504 | 7508 | 7500 | 7472 |
| Speed (rpm) | 2924 | 2928 | 2932 | 2935 |
| Power factor | 0.7514 | 0.7486 | 0.7455 | 0.7408 |
| Efficiency | 0.8963 | 0.8964 | 0.8962 | 0.8959 |
| Ts/Tn | 2.2435 | 2.2162 | 2.1966 | 2.1853 |
| Is/In | 6.3391 | 6.311 | 6.2893 | 6.2704 |
| Tmax/Tn | 3.1755 | 3.0915 | 3.0208 | 2.9631 |
Table 8.
Nominal, start, and maximum torque results on the 7.5 kW motor (equal output power criteria, variations of R′22).
Table 8.
Nominal, start, and maximum torque results on the 7.5 kW motor (equal output power criteria, variations of R′22).
| R′22 (Ω) | 2.12 | 1.93 | 1.77 | 1.63 |
|---|
| Total losses (W) | 867 | 867 | 868 | 870 |
| Speed (rpm) | 2924 | 2928 | 2932 | 2935 |
| Power factor | 0.7514 | 0.7483 | 0.7455 | 0.7416 |
| Efficiency | 0.8963 | 0.8963 | 0.8962 | 0.8959 |
| Ts/Tn | 2.2435 | 2.2188 | 2.1966 | 2.1768 |
| Is/In | 6.3391 | 6.3156 | 6.2893 | 6.2542 |
| Tmax/Tn | 3.1755 | 3.0952 | 3.0208 | 2.9517 |
Table 9.
Nominal, start, and maximum torque results on the 7.5 kW motor (equal heating criteria, variations of type of steel).
Table 9.
Nominal, start, and maximum torque results on the 7.5 kW motor (equal heating criteria, variations of type of steel).
| Type of Steel | M45 | M36 | M27 | M15 |
|---|
| Output power (W) | 7504 | 8228 | 8446 | 8885 |
| Speed (rpm) | 2924 | 2916 | 2914 | 2910 |
| Power factor | 0.7514 | 0.7693 | 0.7743 | 0.783 |
| Efficiency | 0.8963 | 0.9046 | 0.9069 | 0.9111 |
| Ts/Tn | 2.2435 | 2.0416 | 1.9878 | 1.8872 |
| Is/In | 6.3391 | 5.9666 | 5.8628 | 5.658 |
| Tmax/Tn | 3.1755 | 2.8902 | 2.8141 | 2.672 |
Table 10.
Nominal, start, and maximum torque results on the 7.5 kW motor (equal output power criteria, variations of type of steel).
Table 10.
Nominal, start, and maximum torque results on the 7.5 kW motor (equal output power criteria, variations of type of steel).
| Type of Steel | M45 | M36 | M27 | M15 |
|---|
| Total losses (W) | 867 | 787 | 761 | 707 |
| Speed (rpm) | 2924 | 2924 | 2924 | 2924 |
| Power factor | 0.7514 | 0.7489 | 0.7485 | 0.747 |
| Efficiency | 0.8963 | 0.9049 | 0.9078 | 0.9138 |
| Ts/Tn | 2.2435 | 2.2455 | 2.2458 | 2.2464 |
| Is/In | 6.3391 | 6.3813 | 6.3973 | 6.4262 |
| Tmax/Tn | 3.1755 | 3.1787 | 3.1794 | 3.1805 |
Table 11.
Efficiency improvement strategy.
Table 11.
Efficiency improvement strategy.
| | 0.25 kW | 1.5 kW | 7.5 kW | 22 kW | 45 kW |
|---|
| dc (mm) | 0.4 | 1 | 1.32 | 2.36 | 3 |
| dc mod. (mm) | 0.5 | 1.12 | 1.41 | 2.8 | 3.36 |
| AR (mm2) | 30 | 42 | 24.6/78 | 25.5/70 | 169 |
| AR mod. (mm2) | 36 | 52.5 | - | - | 205 |
| Steel | M47 | M45 | M45 | M45 | M47 |
| Steel mod. | M15 | M15 | M15 | M15 | M15 |
| Eff. FL after mod. | 0.844 | 0.864 | 0.928 | 0.931 | 0.945 |
| Eff. FL var. (%) | 6.81 | 8.24 | 2.37 | 2.49 | 2.39 |
| Eff. 3/4 after mod. | 0.842 | 0.865 | 0.928 | 0.936 | 0.951 |
| Eff. 3/4 var. (%) | 7.63 | 8.21 | 3.01 | 2.77 | 2.78 |
| Eff. 1/2 after mod. | 0.803 | 0.846 | 0.911 | 0.926 | 0.940 |
| Eff. 1/2 var. (%) | 7.23 | 9.86 | 5.11 | 4.79 | 2.97 |
Table 12.
Economic evaluation (4500 h/year).
Table 12.
Economic evaluation (4500 h/year).
| | 0.25 kW | 1.5 kW | 7.5 kW | 22 kW | 45 kW |
|---|
| (1) kWh | 96.81 | 674.23 | 1167.97 | 3297.63 | 5680.35 |
| (2) EUR | 7.11 | 26.36 | 64.67 | 266.65 | 400.78 |
| (3) years | 0.92 | 0.49 | 0.69 | 1.01 | 0.88 |




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}



















