
Experimental Validations of Hybrid Excited Linear Flux Switching Machine



Abstract
:1. Introduction
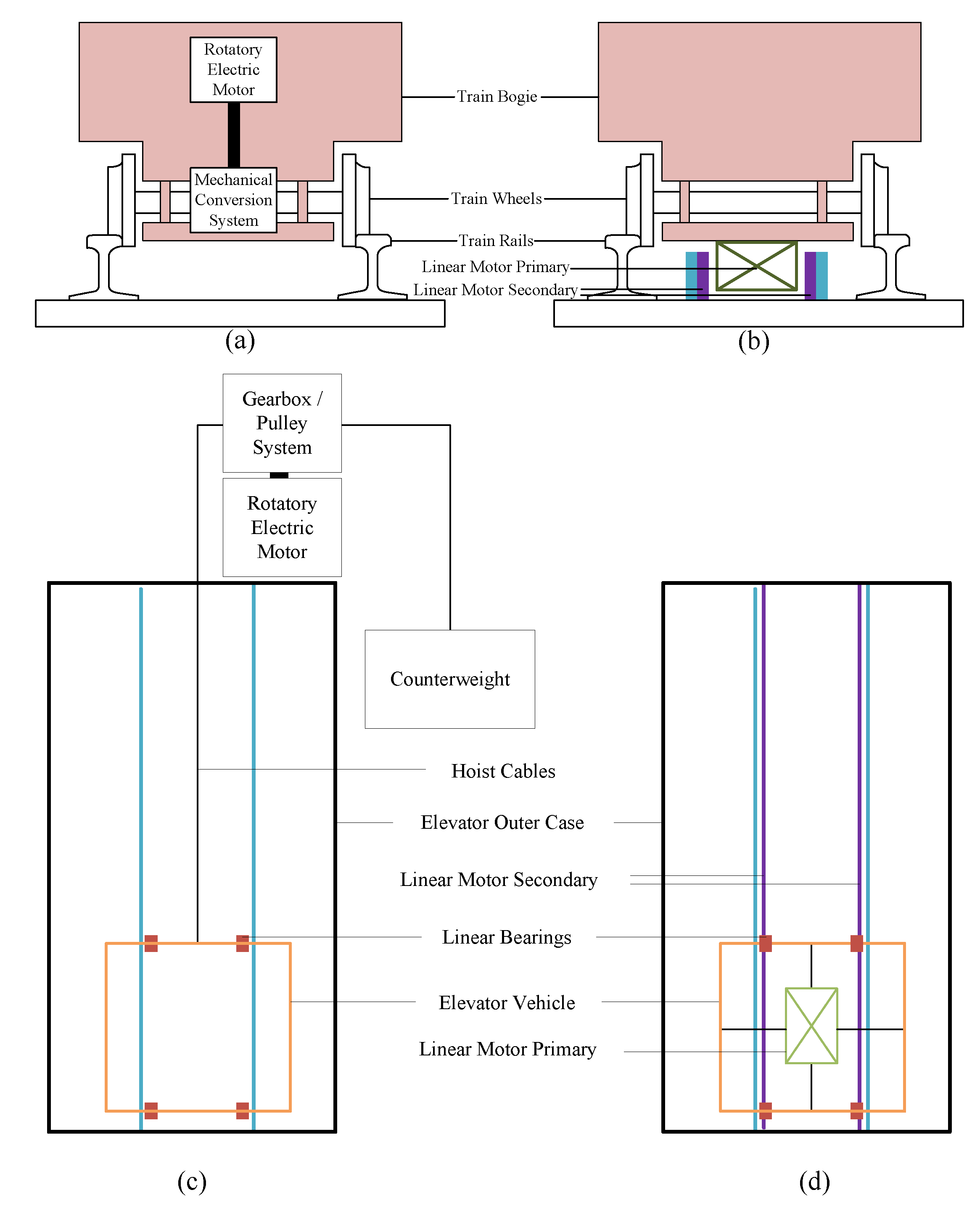
2. Targeted Applications
3. Topology and Working Principle
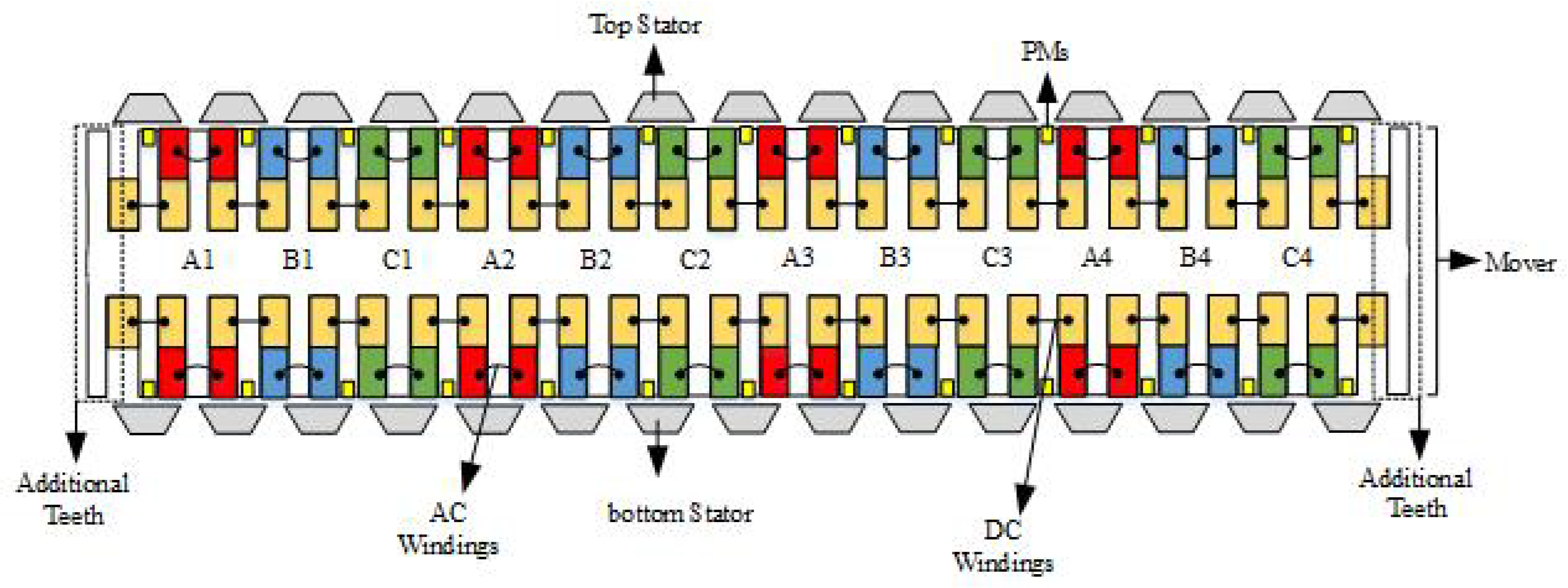
3.1. Topology
3.2. Working Principle
4. Optimization and Comparisons
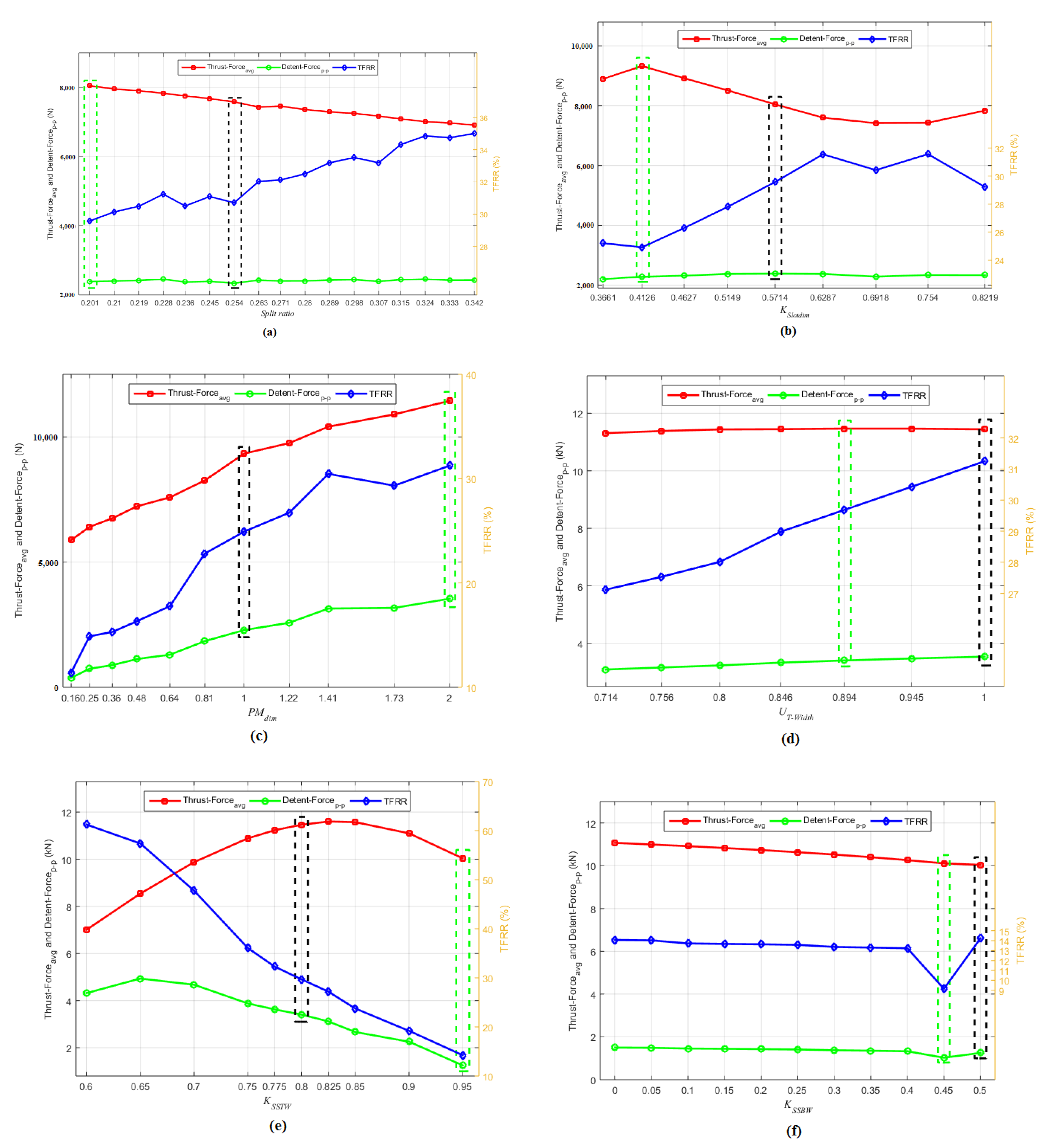
4.1. Optimization of Proposed HELFSM
4.1.1. Split Ratio Optimization
4.1.2. Slot Area Dimensions Optimization
4.1.3. PM Dimensions Optimization
4.1.4. Unequal Primary Tooth Width Optimization
4.1.5. Stator Segment Tip Width Optimization
4.1.6. Stator Segment Base Width Optimization
4.2. Comparison of Initial and Optimized HELFSM
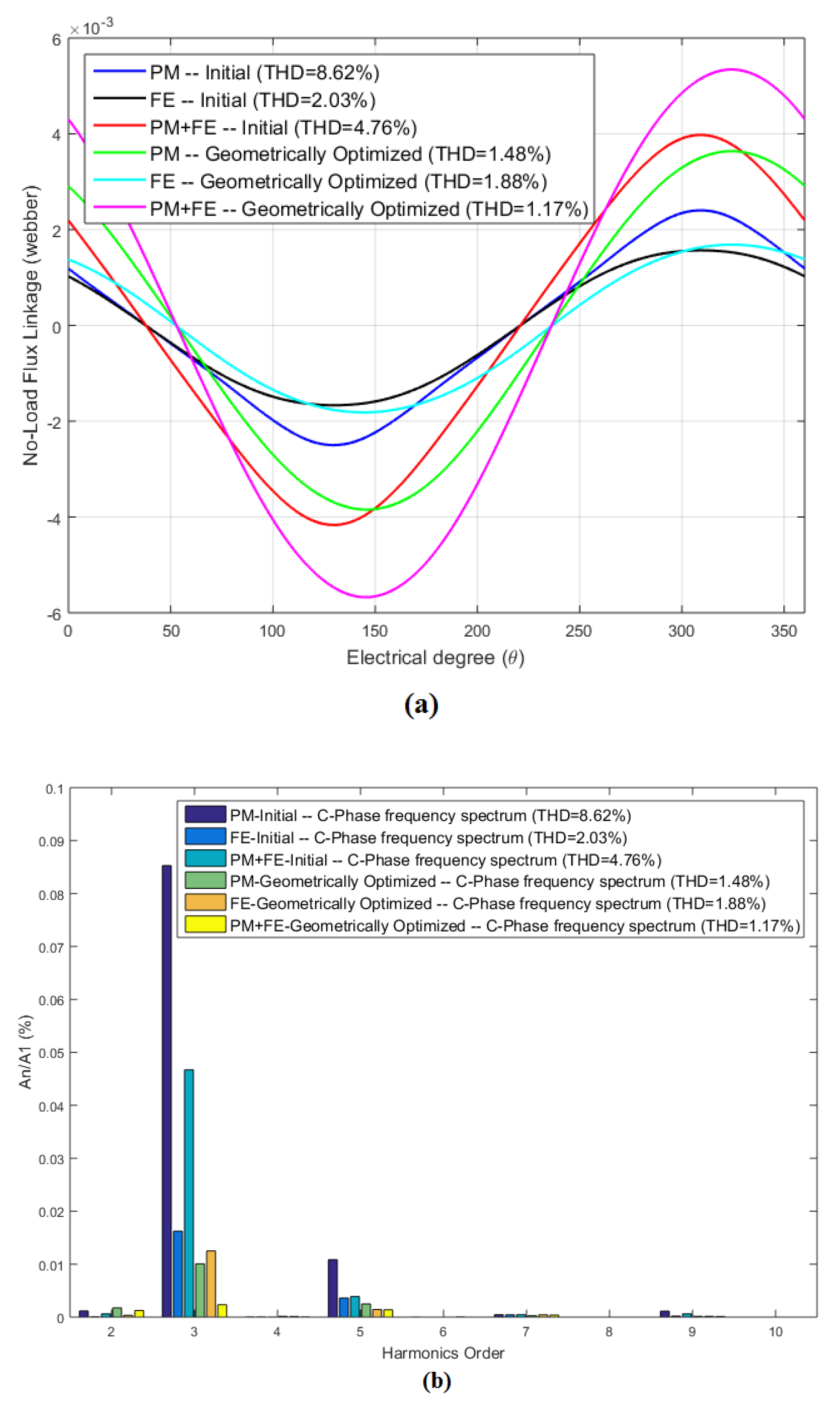
4.2.1. No-Load Flux Linkage
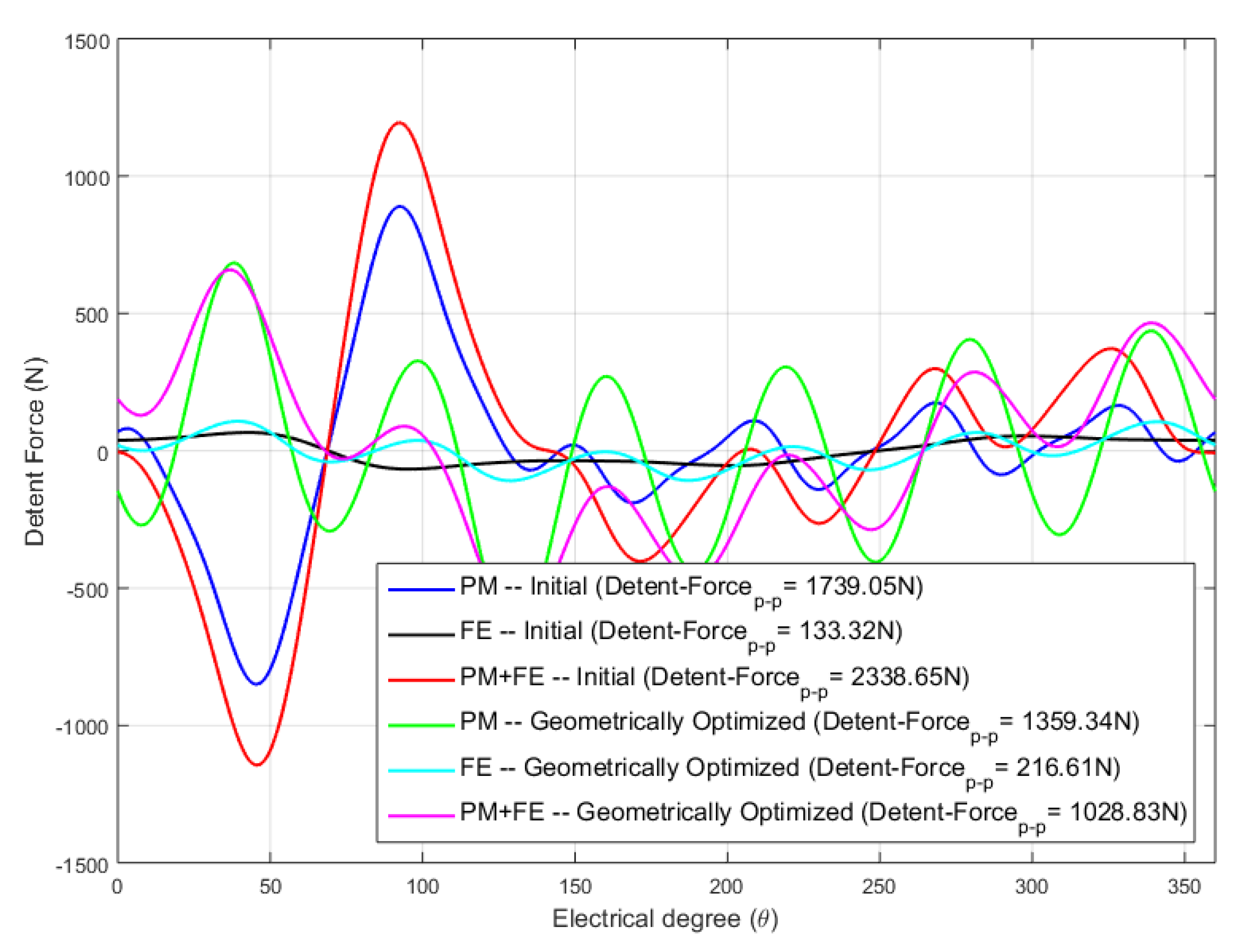
4.2.2. Detent Force
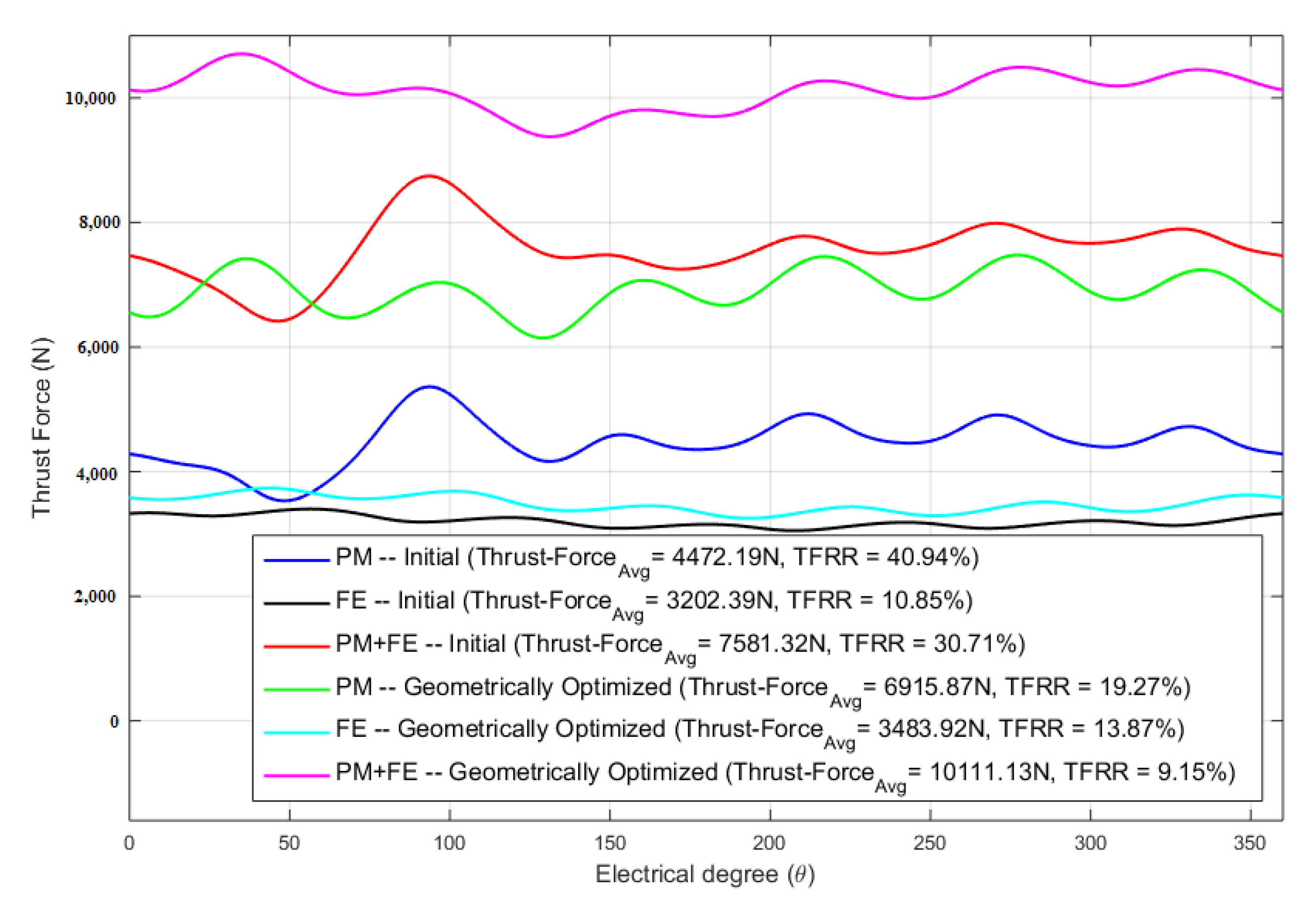
4.2.3. Thrust Force and TFRR
5. Experimental Validation
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Tang, Y.; Ilhan, E.; Paulides, J.; Lomonova, E. Design considerations of flux-switching machines with permanent magnet or DC excitation. In Proceedings of the 2013 15th European Conference on Power Electronics and Applications (EPE), Lille, France, 2–6 September 2013; pp. 1–10. [Google Scholar]
- Barrero, F.; Duran, M.J. Recent advances in the design, modeling, and control of multiphase machines—Part I. IEEE Trans. Ind. Electron. 2015, 63, 449–458. [Google Scholar] [CrossRef]
- Cao, R.; Mi, C.; Cheng, M. Quantitative comparison of flux-switching permanent-magnet motors with interior permanent magnet motor for EV, HEV, and PHEV applications. IEEE Trans. Magn. 2012, 48, 2374–2384. [Google Scholar] [CrossRef]
- Thomas, A.; Zhu, Z.; Wu, L. Novel modular-rotor switched-flux permanent magnet machines. IEEE Trans. Ind. Appl. 2012, 48, 2249–2258. [Google Scholar] [CrossRef]
- Li, W.; Chau, K.; Jiang, J. Application of linear magnetic gears for pseudo-direct-drive oceanic wave energy harvesting. IEEE Trans. Magn. 2011, 47, 2624–2627. [Google Scholar] [CrossRef]
- Zeng, Z.; Lu, Q. A Novel Hybrid-Excitation Switched-Flux Linear Machine With Partitioned-Excitations. IEEE Trans. Magn. 2019, 55, 1–4. [Google Scholar] [CrossRef]
- Xiao, F.; Du, Y.; Sun, Y.; Zhu, H.; Zhao, W.; Li, W.; Ching, T.; Qiu, C. A novel double-sided flux-switching permanent magnet linear motor. J. Appl. Phys. 2015, 117, 17B530. [Google Scholar] [CrossRef]
- Hao, W.; Wang, Y.; Deng, Z. Study of two kinds of double-sided yokeless linear flux-switching permanent magnet machines. In Proceedings of the 2016 IEEE Vehicle Power and Propulsion Conference (VPPC), Hangzhou, China, 17–20 October 2016; pp. 1–6. [Google Scholar]
- Cao, R.; Jin, Y.; Zhang, Z.; Cheng, M. A new double-sided linear flux-switching permanent magnet motor with yokeless mover for electromagnetic launch system. IEEE Trans. Energy Convers. 2018, 34, 680–690. [Google Scholar] [CrossRef]
- Hao, W.; Wang, Y. Analysis of double-sided sandwiched linear flux-switching permanent-magnet machines with staggered stator teeth for urban rail transit. IET Electr. Syst. Transp. 2018, 8, 175–181. [Google Scholar] [CrossRef]
- Cao, R.; Huang, W.; Cheng, M. A new modular and complementary double-sided linear flux-switching permanent magnet motor with yokeless secondary. In Proceedings of the 2014 17th International Conference on Electrical Machines and Systems (ICEMS), Hangzhou, China, 22–25 October 2014; pp. 3648–3652. [Google Scholar]
- Liu, C.T.; Hwang, C.C.; Li, P.L.; Hung, S.S.; Wendling, P. Design optimization of a double-sided hybrid excited linear flux switching PM motor with low force ripple. IEEE Trans. Magn. 2014, 50, 1–4. [Google Scholar] [CrossRef]
- Cao, R.; Jin, Y.; Zhang, Y.; Cheng, M. A new double-sided HTS flux-switching linear motor with series magnet circuit. IEEE Trans. Appl. Supercond. 2016, 26, 1–5. [Google Scholar] [CrossRef]
- Petrov, I.; Ponomarev, P.; Alexandrova, Y.; Pyrhönen, J. Unequal teeth widths for torque ripple reduction in permanent magnet synchronous machines with fractional-slot non-overlapping windings. IEEE Trans. Magn. 2014, 51, 1–9. [Google Scholar] [CrossRef] [Green Version]
- Chau, K.; Chan, C.C.; Liu, C. Overview of permanent-magnet brushless drives for electric and hybrid electric vehicles. IEEE Trans. Ind. Electron. 2008, 55, 2246–2257. [Google Scholar] [CrossRef] [Green Version]
- Fan, H.; Chau, K.; Liu, C.; Cao, L.; Ching, T. Quantitative comparison of novel dual-PM linear motors for ropeless elevator system. IEEE Trans. Magn. 2018, 54, 1–6. [Google Scholar]
- Ullah, N.; Khan, F.; Basit, A.; Ullah, W.; Haseeb, I. Analytical Airgap Field Model and Experimental Validation of Double Sided Hybrid Excited Linear Flux Switching Machine. IEEE Access 2021, 9, 117120–117131. [Google Scholar] [CrossRef]
- Wang, Y.; Xu, W.; Zhang, X.; Ma, W. Harmonic analysis of air gap magnetic field in flux-modulation double-stator electrical-excitation synchronous machine. IEEE Trans. Ind. Electron. 2019, 67, 5302–5312. [Google Scholar] [CrossRef]
- Shi, Y.; Ching, T.W.; Jian, L.; Li, W. A new dual-permanent-magnet-excited motor with hybrid stator configuration for direct-drive applications. In Proceedings of the 2019 22nd International Conference on Electrical Machines and Systems (ICEMS), Harbin, China, 11–14 August 2019; pp. 1–6. [Google Scholar]
- Liu, Q.; Yu, H.; Hu, M.; Liu, C.; Zhang, J.; Huang, L.; Zhou, S. Cogging force reduction of double-sided linear flux-switching permanent magnet machine for direct drives. IEEE Trans. Magn. 2013, 49, 2275–2278. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Parameter (Unit) | Initial Value | Optimized Value |
|---|---|---|---|
| Stator pole pitch (mm) | 30 | ||
| Mover pole pitch (mm) | 35 | ||
| Mover height (mm) | 85 | 91 | |
| Mover DC tooth width (mm) | 7.5 | 9.5 | |
| Stator height (mm) | 25 | 19 | |
| Slot width (mm) | 10 | 8.5 | |
| Mover AC tooth width (mm) | 7.5 | 8.5 | |
| Slot height (mm) | 17.5 | 20.6 | |
| Mover yoke height (mm) | 15 | 8.6 | |
| PM width (mm) | 5 | 7 | |
| PM height (mm) | 5 | 3.5 | |
| PM volume (grams) | 45.5 | 45.5 | |
| Stator segment tip width (mm) | 24 | 28.5 | |
| Stator segment height (mm) | 12.5 | 9.5 | |
| Stator segment base width (mm) | 12 | 12.825 | |
| L | Stack length (mm) | 10 | |
| g | Air-gap height (mm) | 2 | |
| v | Mover velocity (m/s) | 1.5 | |
| DC current density (A/mm) | 4.52 | ||
| AC current density (A/mm) | 4.57 | ||
| Number of AC and DC coil turns | 40 | ||
| Coefficients (Symbol) | Definition | Initial Value | Constraints | Optimized Value |
|---|---|---|---|---|
| Split Ratio | 0.254 | (0.20–0.34) | 0.201 | |
| Slot area | 0.571 | (0.36–0.82) | 0.412 | |
| dimensions | ||||
| PM dimensions | 1.0 | (0.16–2.0) | 2.0 | |
| Unequal tooth | 1.0 | (0.71–1.0) | 0.894 | |
| width | ||||
| Stator segment | 0.8 | (0.60–0.95) | 0.95 | |
| tip width | ||||
| Stator segment | 0.5 | (0–0.50) | 0.45 | |
| base width | ||||
| Performance Indicator (Unit) | Excitation | Initial Value | Optimized Value |
|---|---|---|---|
| Flux Linkage | PM | 4.88 | 7.41 |
| (mWb) | |||
| THD | 8.62 | 1.48 | |
| Detent Force | 1739.05 | 1359.34 | |
| (N) | |||
| Thrust Force | 4472.19 | 6915.87 | |
| (N) | |||
| TFRR | 40.94 | 19.27 | |
| Flux Linkage | FEC | 3.20 | 3.45 |
| (mWb) | |||
| THD | 2.03 | 1.88 | |
| Detent Force | 133.32 | 216.61 | |
| (N) | |||
| Thrust Force | 3202.39 | 3483.92 | |
| (N) | |||
| TFRR | 10.85 | 13.87 | |
| Flux Linkage | PM+FEC | 8.10 | 10.90 |
| (mWb) | |||
| THD | 4.76 | 1.17 | |
| Detent Force | 2338.65 | 1028.83 | |
| (N) | |||
| Thrust Force | 7581.32 | 10111.13 | |
| (N) | |||
| TFRR | 30.71 | 9.15 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ullah, N.; Khan, F.; Basit, A.; Shahzad, M. Experimental Validations of Hybrid Excited Linear Flux Switching Machine. Energies 2021, 14, 7274. https://doi.org/10.3390/en14217274
Ullah N, Khan F, Basit A, Shahzad M. Experimental Validations of Hybrid Excited Linear Flux Switching Machine. Energies. 2021; 14(21):7274. https://doi.org/10.3390/en14217274
Chicago/Turabian StyleUllah, Noman, Faisal Khan, Abdul Basit, and Mohsin Shahzad. 2021. "Experimental Validations of Hybrid Excited Linear Flux Switching Machine" Energies 14, no. 21: 7274. https://doi.org/10.3390/en14217274
APA StyleUllah, N., Khan, F., Basit, A., & Shahzad, M. (2021). Experimental Validations of Hybrid Excited Linear Flux Switching Machine. Energies, 14(21), 7274. https://doi.org/10.3390/en14217274