
Design and Analysis of a Permanent Magnet Vernier Machine with Non-Uniform Tooth Distribution



Abstract
:1. Introduction
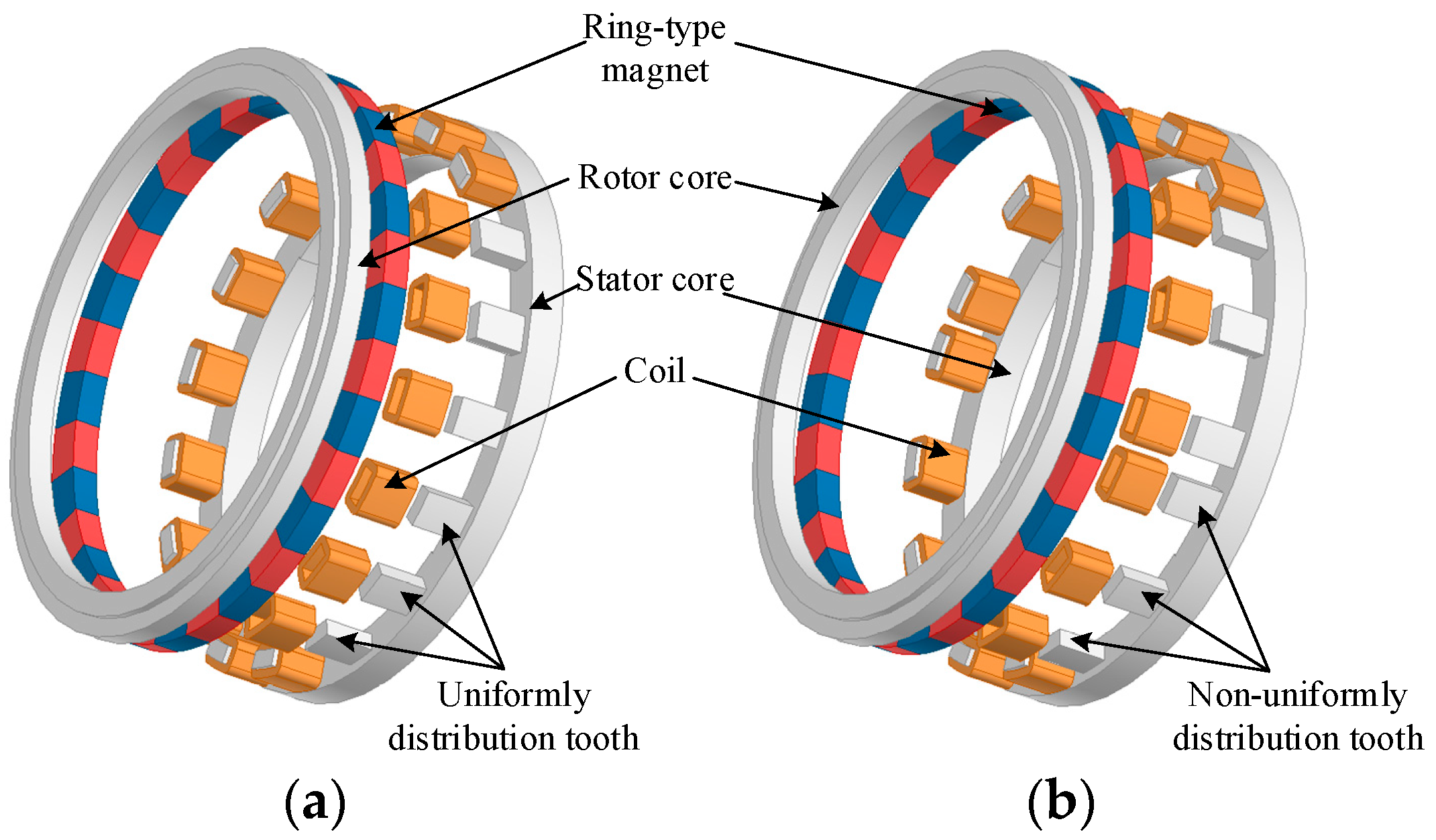
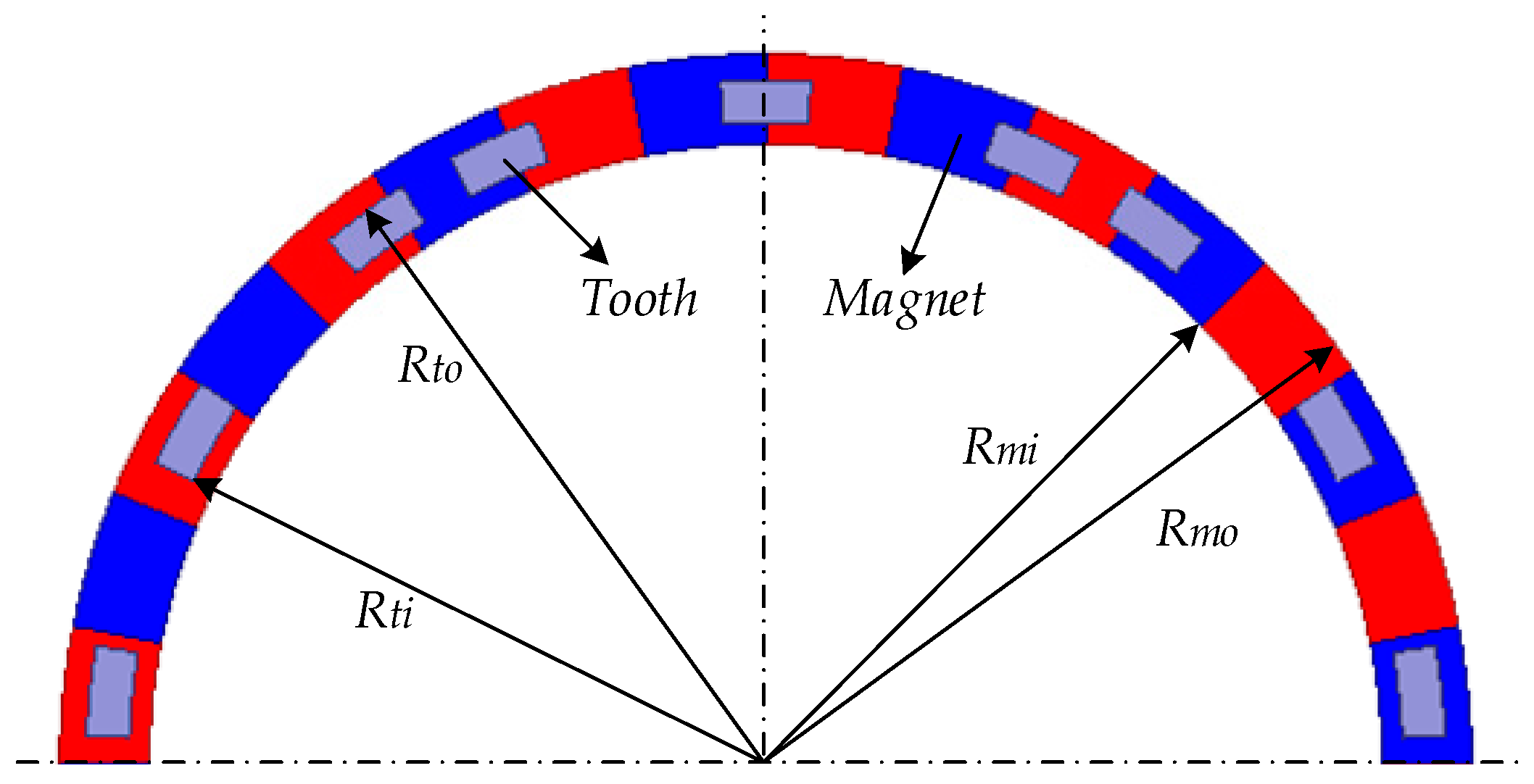
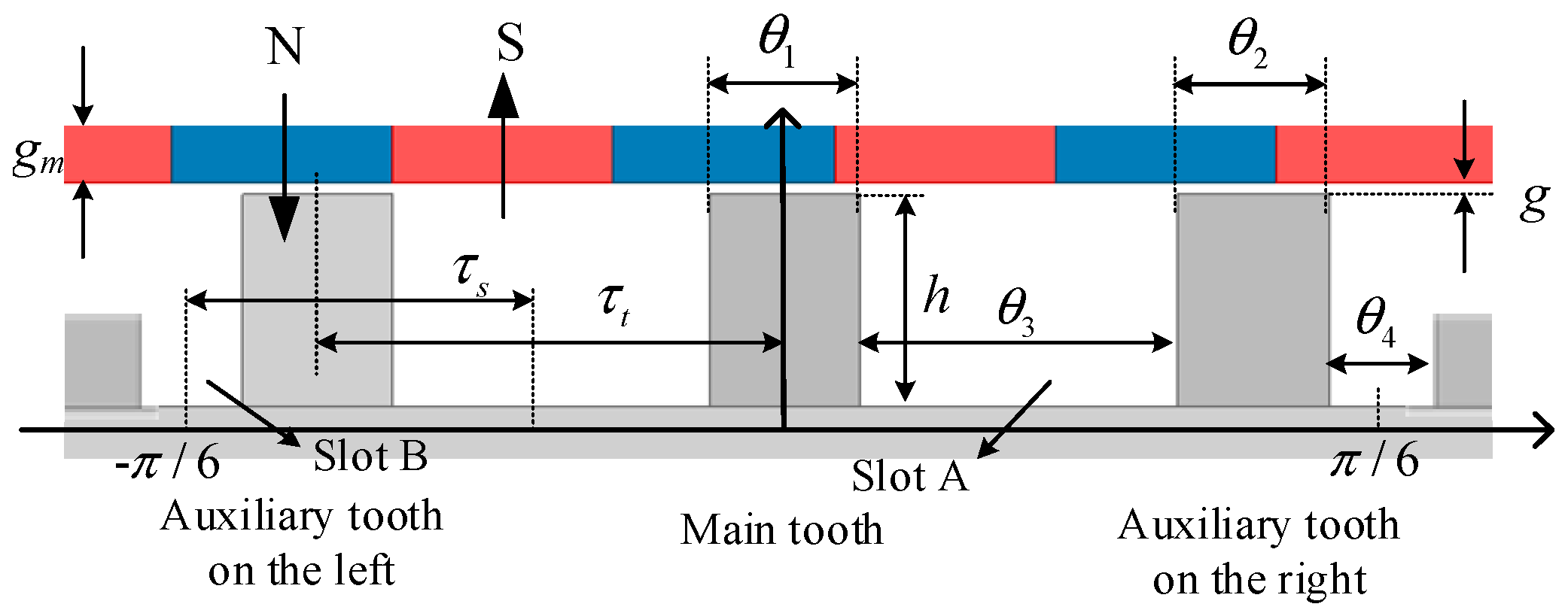
2. Topology and Parameters
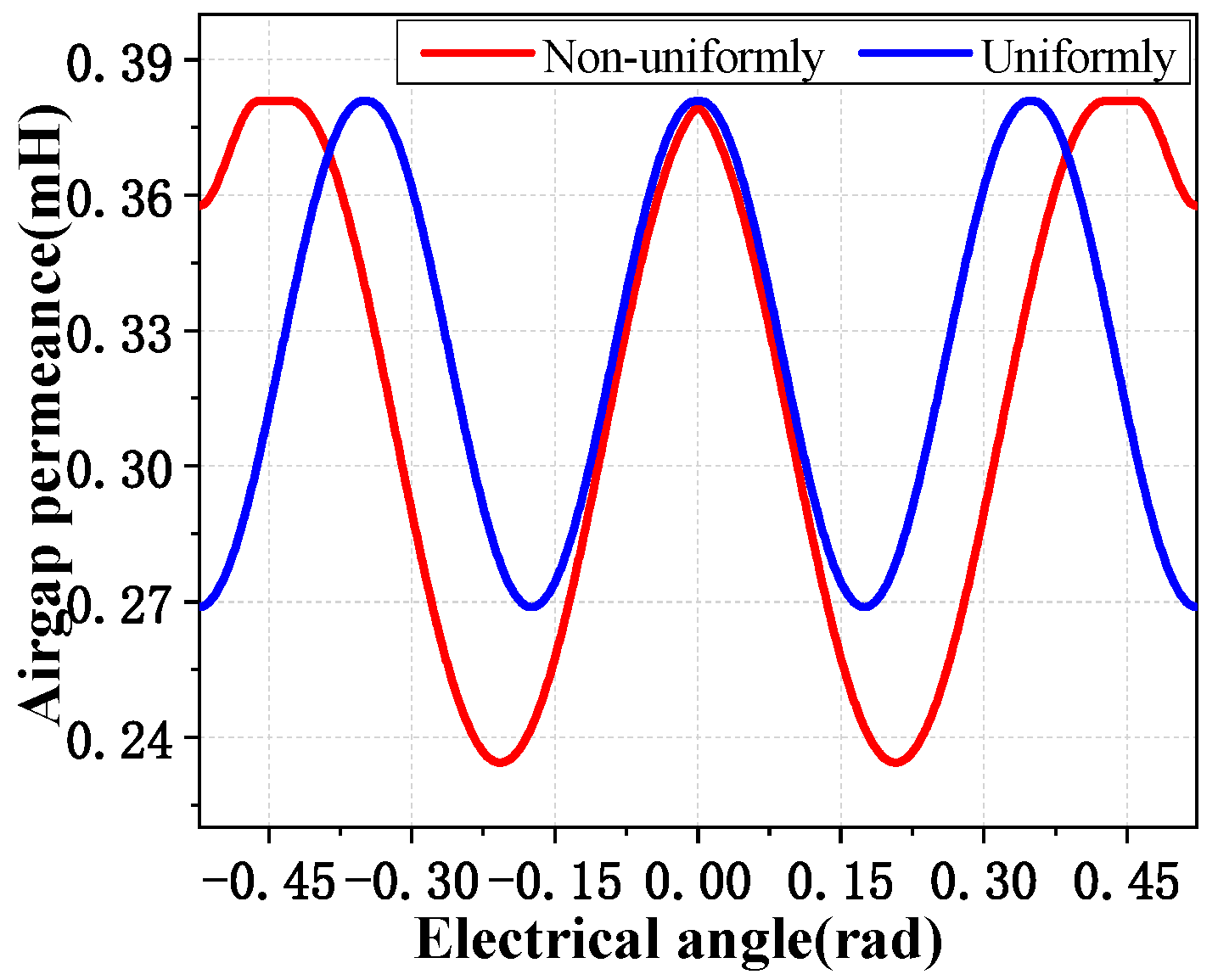
3. Analysis of Proposed Topology
- (1)
- Relative permeability of PMs and coils is assumed to 1;
- (2)
- End effect and the magnetic field component on the radial direction are neglected.
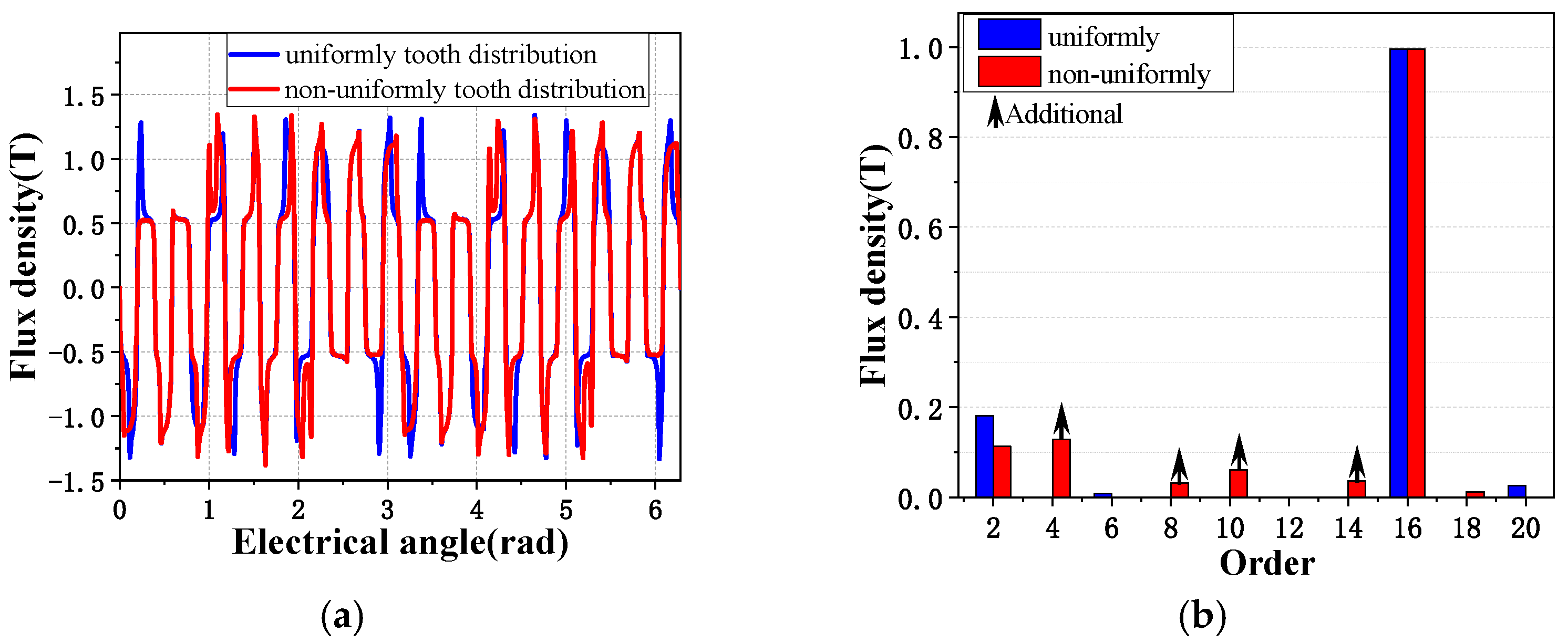
3.1. No-Load Airgap Flux Density
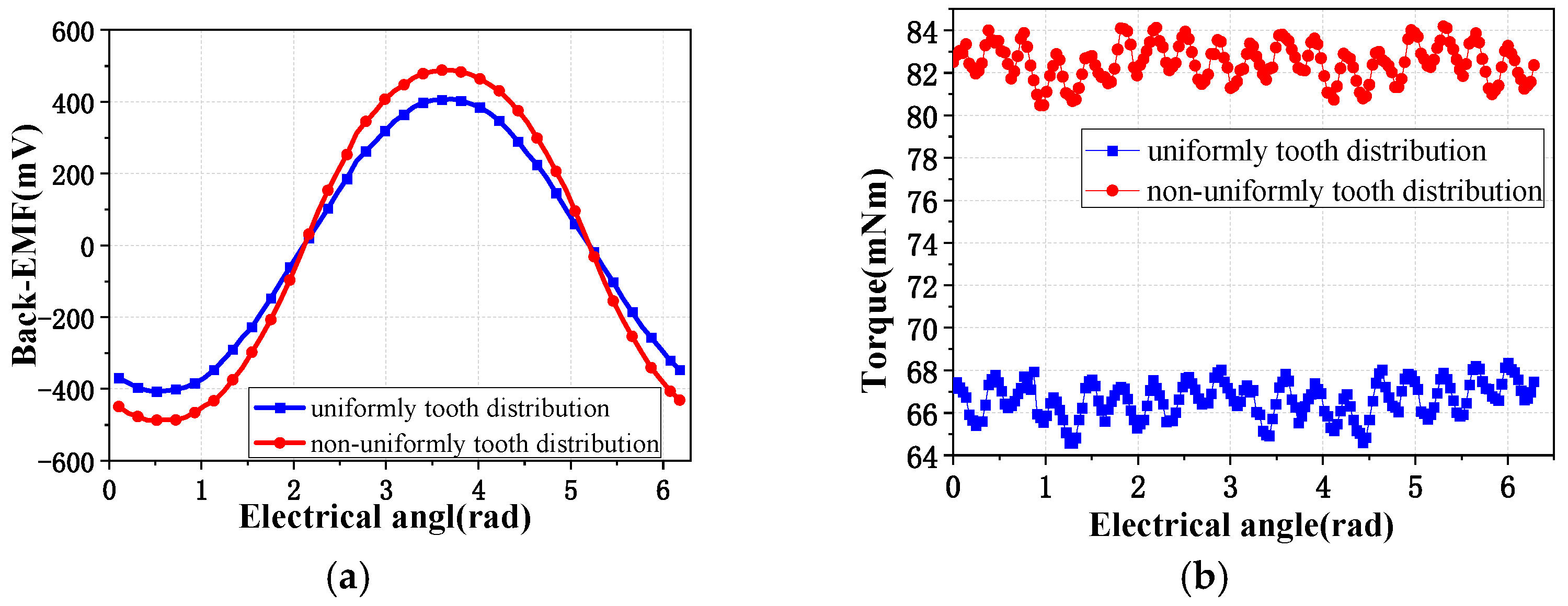
3.2. Back-EMF and Electromagnetic Torque
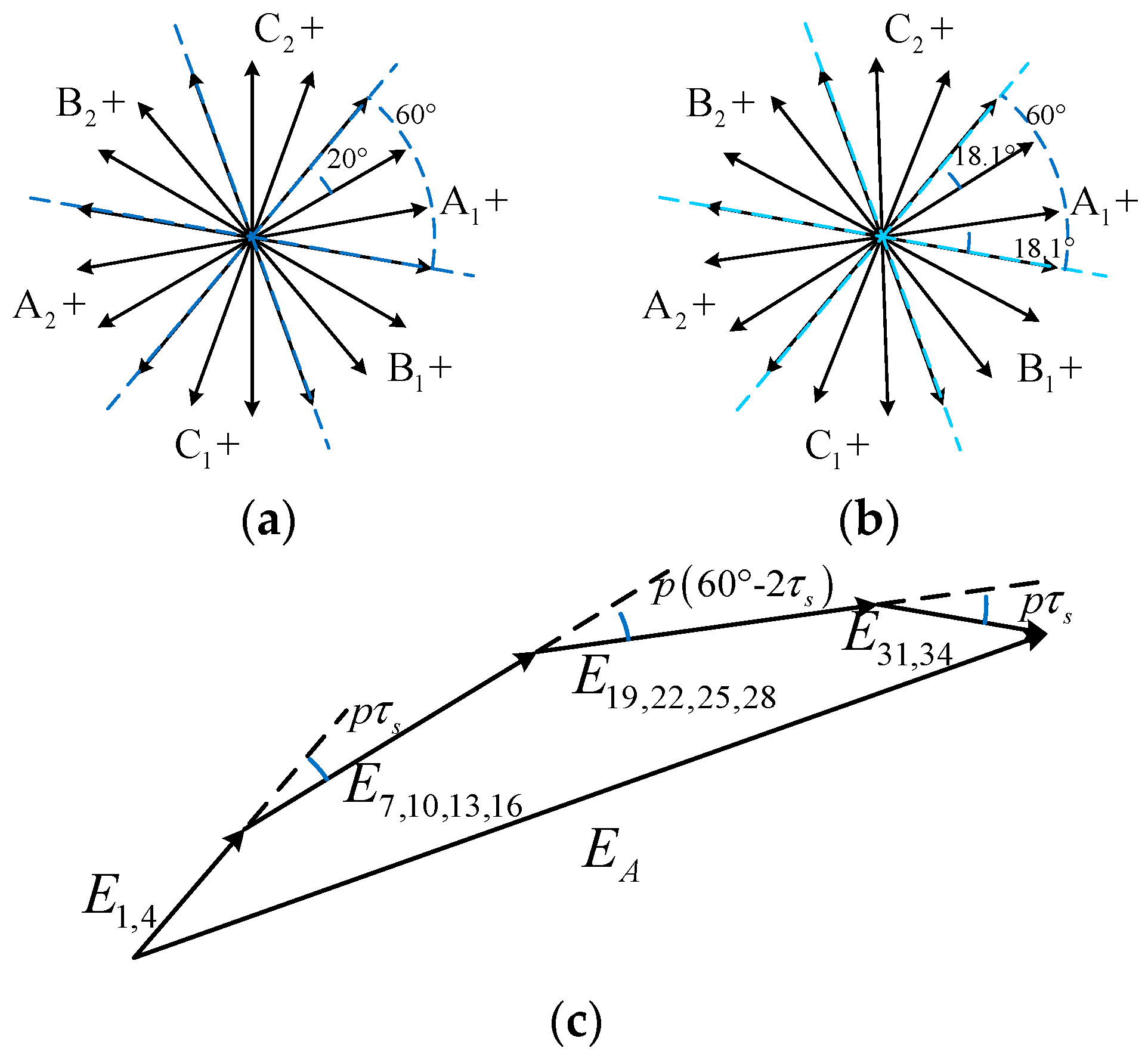
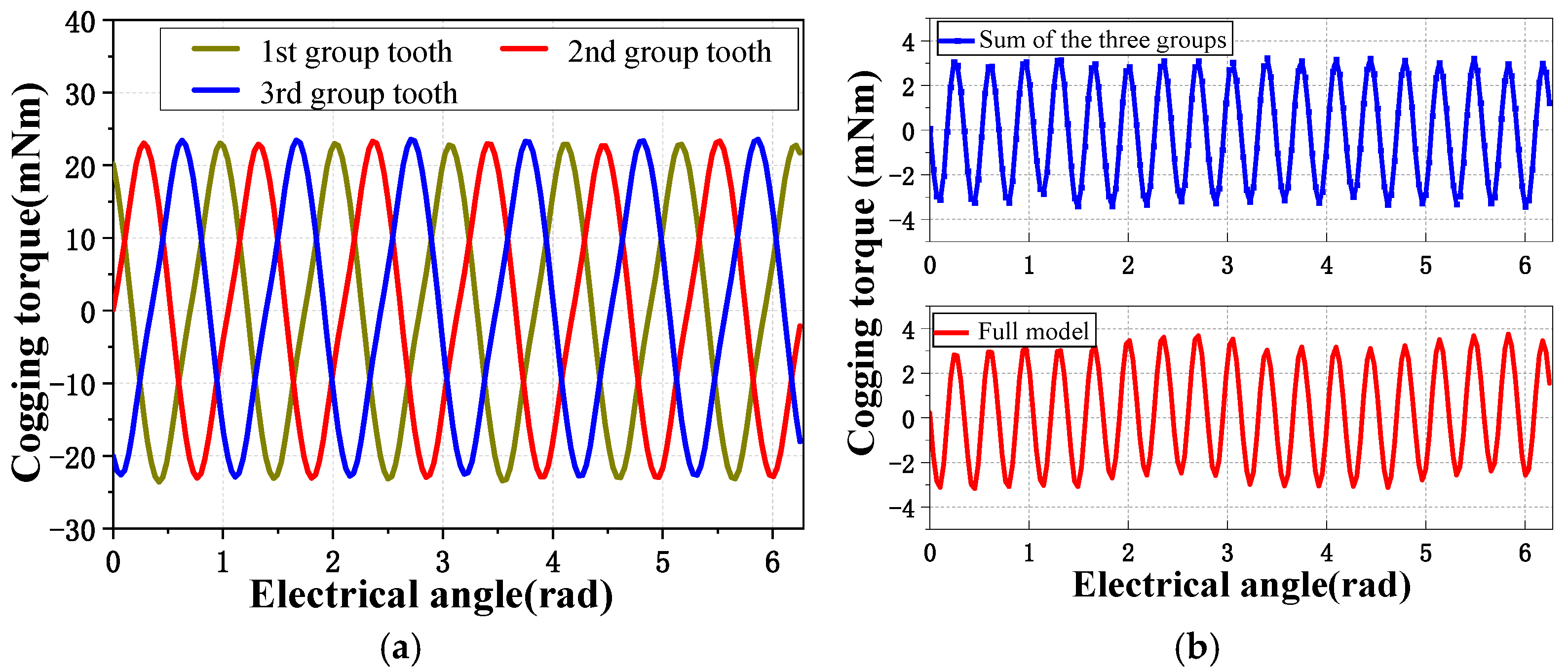
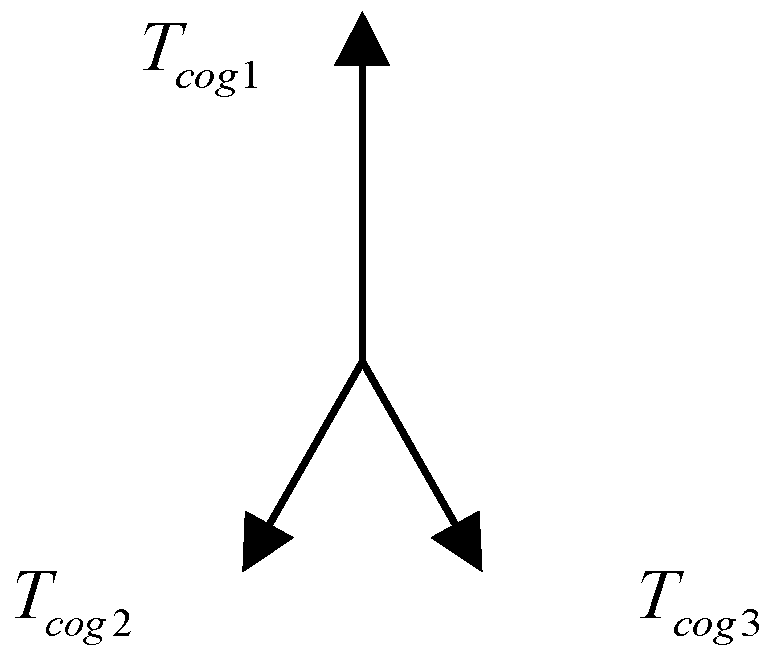
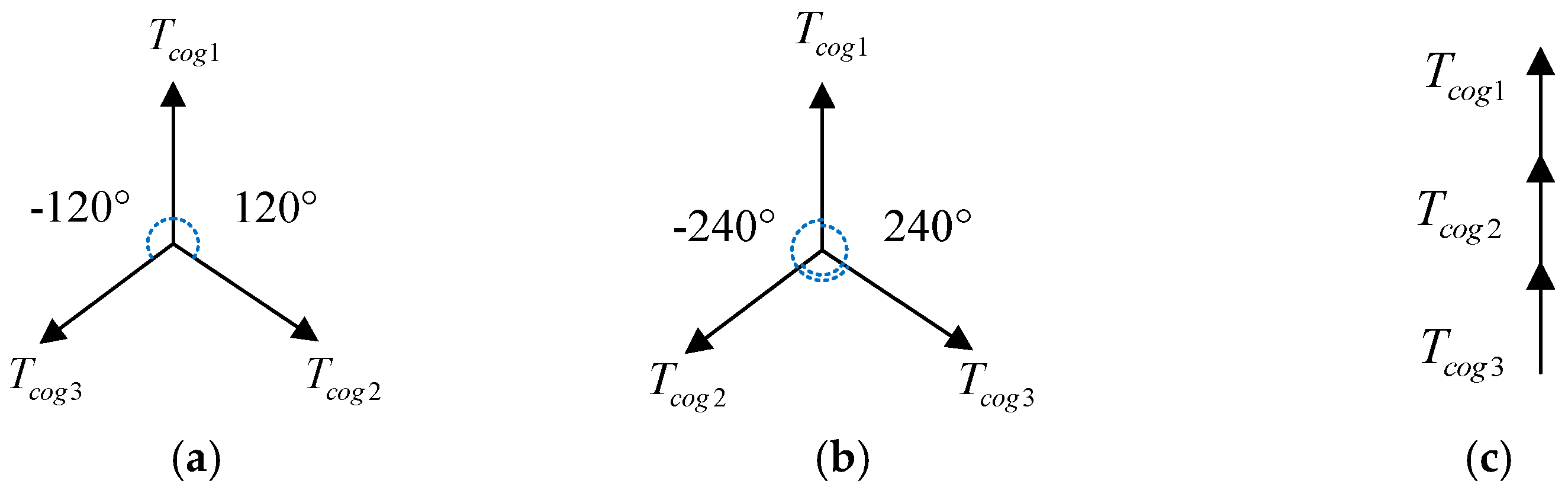
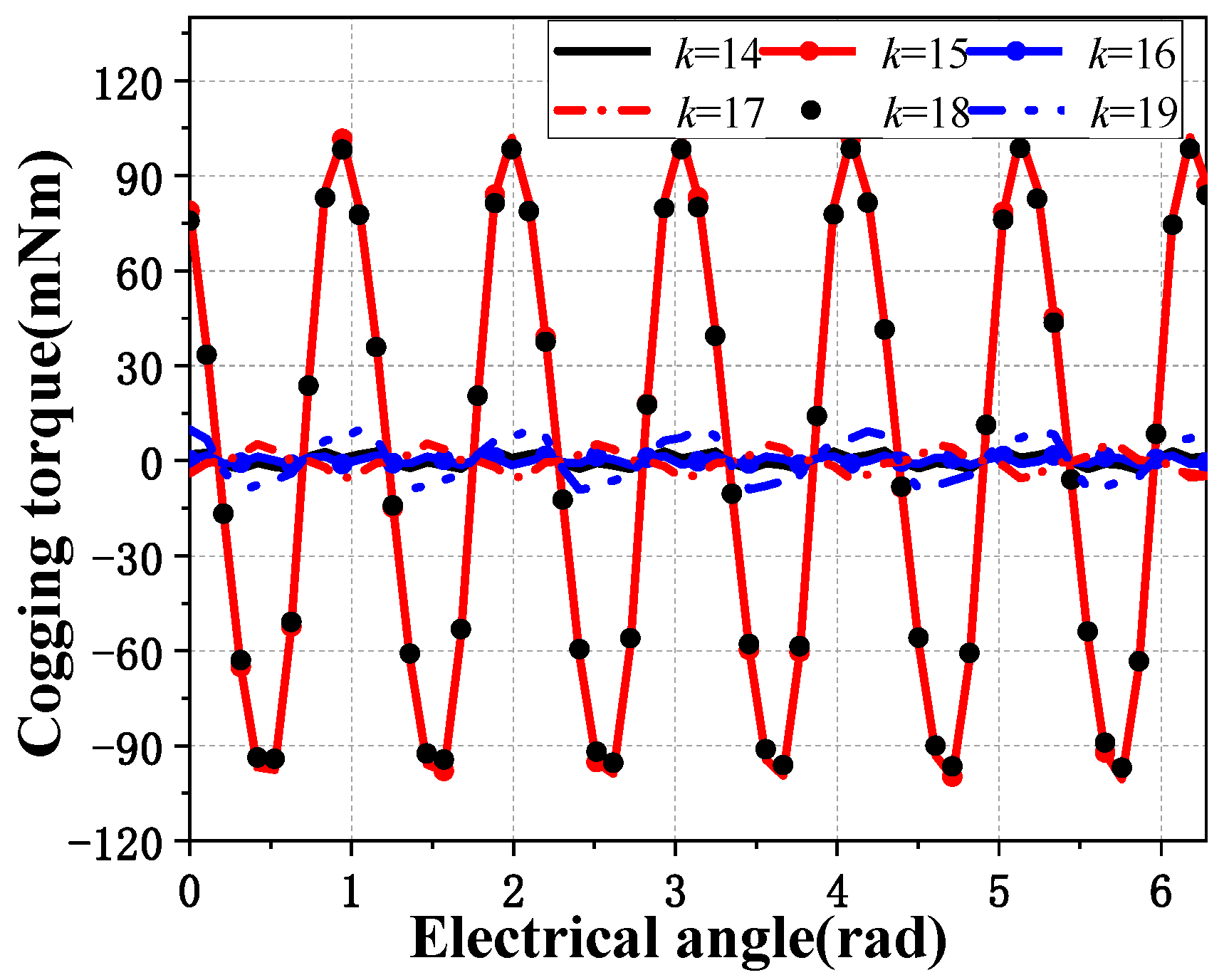
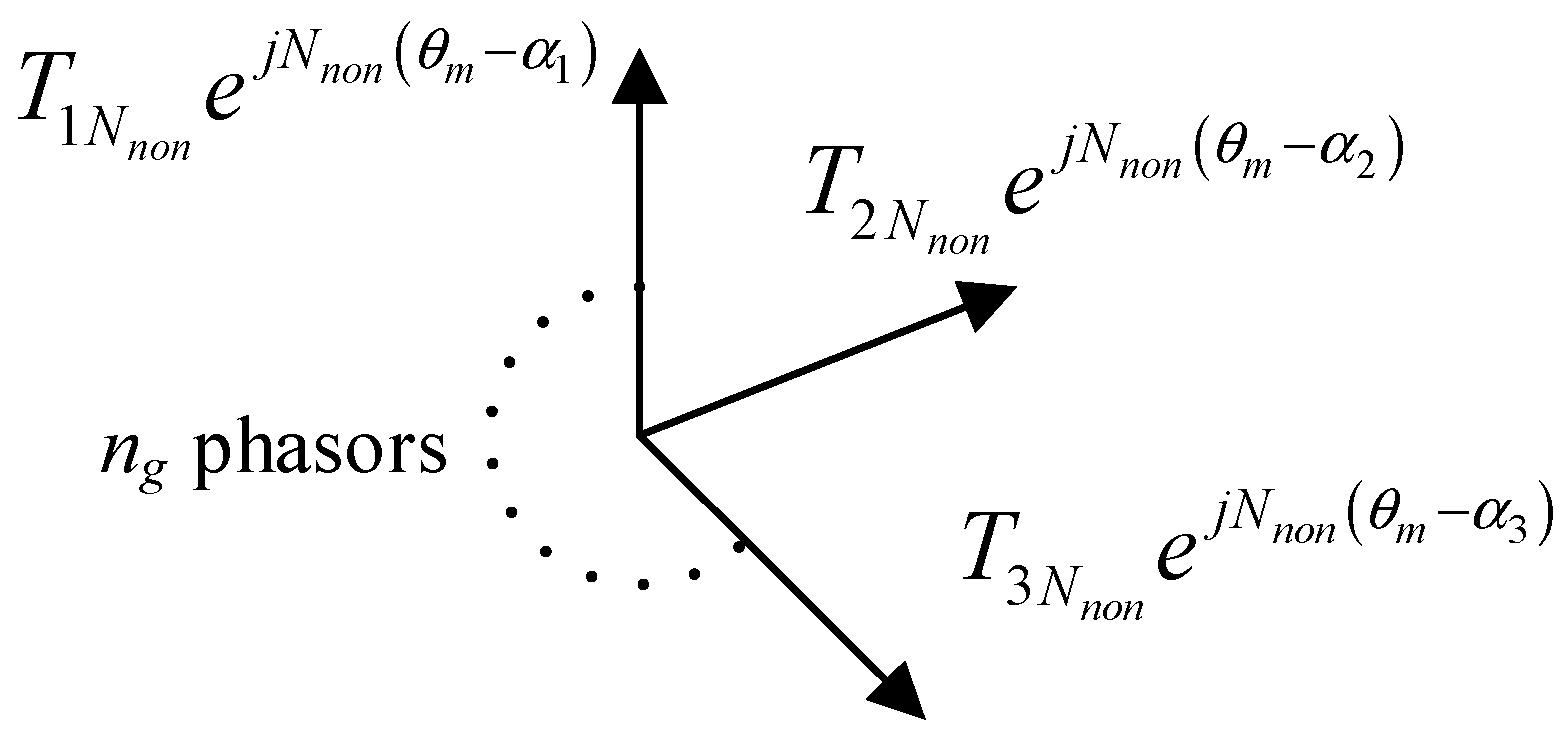
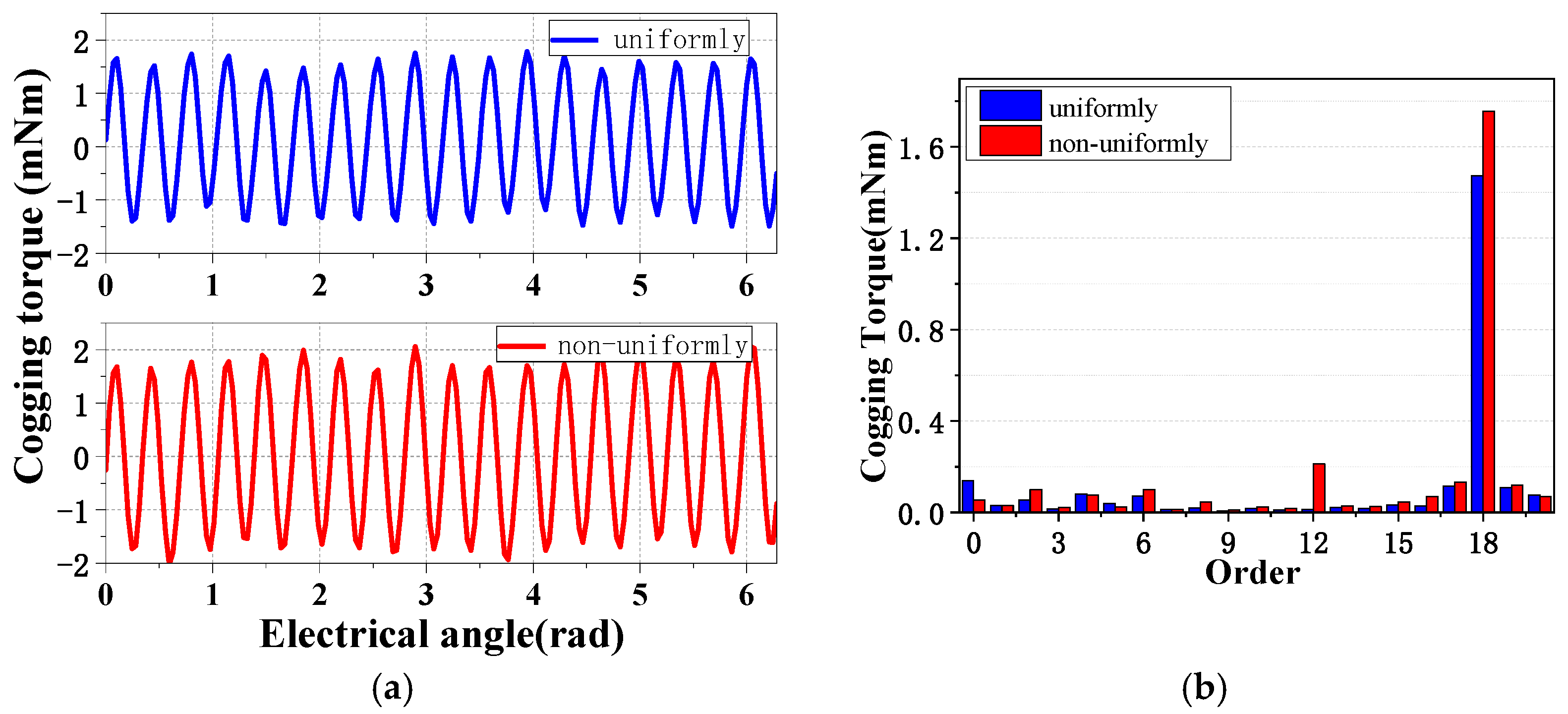
3.3. Cogging Torque
4. Design Method for Non-Uniform Tooth Distribution
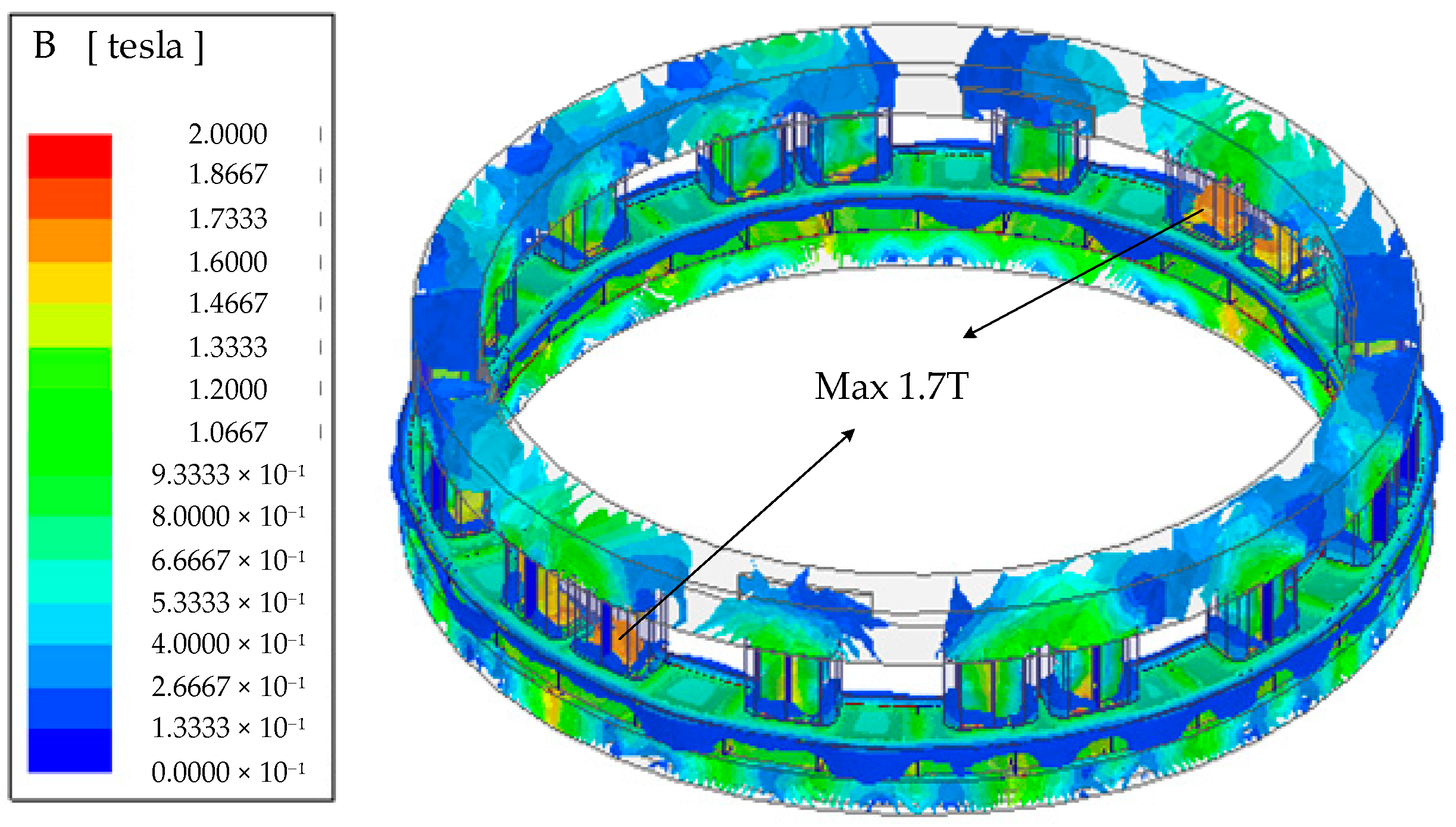
5. FEM Results of Proposed Topology
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Zhang, C.; Li, L.; Guo, Q. Parameter analysis of power system for solar-powered unmanned aerial vehicle. Appl. Energy 2021, 295, 117031. [Google Scholar] [CrossRef]
- Toba, A.; Lipo, T. Generic torque-maximizing design methodology of surface permanent-magnet vernier machine. IEEE Trans. Ind. Appl. 2000, 36, 1539–1546. [Google Scholar]
- Li, J.; Chau, K.; Jiang, J.; Liu, C.; Li, W. A new efficient permanent-magnet vernier machine for wind power generation. IEEE Trans. Magn. 2010, 46, 1475–1478. [Google Scholar] [CrossRef]
- Zhao, F.; Kim, M.; Kwon, B.; Baek, J. A small axial-flux vernier machine with ring-type magnets for the auto-focusing lens drive system. IEEE Trans. Magn. 2016, 52, 1–4. [Google Scholar] [CrossRef]
- Xiao, L.; Li, J.; Qu, R.; Jia, S.; Guo, S. Windings Configurations for Vernier Reluctance Dual-Stator Inner-Rotor Axial Flux Machines. In Proceedings of the 18th International Conference on Electrical Machines and Systems (ICEMS), Pattaya, Thailand, 25–28 October 2015; pp. 1797–1802. [Google Scholar]
- Kesgin, M.G.; Han, P.; Lawhorn, D.; Ionel, D.M. Analysis of Torque Production in Axial-flux Vernier PM Machines of the MAGNUS Type. In Proceedings of the IEEE International Electric Machines & Drives Conference (IEMDC), Hartford, CT, USA, 17–20 May 2021. [Google Scholar]
- Zhang, R.; Li, J.; Qu, R.; Li, D. Analysis and Design of Triple-Rotor Axial-Flux Spoke-Array Vernier Permanent Magnet Machines. IEEE Trans. Ind. Appl. 2018, 1, 244–253. [Google Scholar] [CrossRef]
- Fukai, D.; Shimomura, S. Integrated Radial and Dual Axial-Flux Variable Reluctance Vernier Machine. In Proceedings of the IECON, Dallas, TX, USA, 29 October–1 November 2014. [Google Scholar]
- Wang, Q.; Zhao, F.; Yang, K. Analysis and Optimization of the Axial Electromagnetic Force for an Axial-Flux Permanent Magnet Vernier Machine. IEEE Trans. Magn. 2020, 57, 1–5. [Google Scholar] [CrossRef]
- Deng, W.; Zuo, S. Axial force and vibroacoustic analysis of externalrotor axial-flux motors. IEEE Trans. Ind. Electron. 2018, 65, 2018–2030. [Google Scholar]
- Liu, G.; Chen, M.; Zhao, W.; Chen, Q.; Zhao, W. Design and analysis of five-phase fault-tolerant interior permanent-magnet vernier machine. IEEE Trans. Appl. Supercond. 2016, 26, 1–5. [Google Scholar] [CrossRef]
- Bilal, M.; Ikr, A.; Fida, A. Performance improvement of dual stator axial flux spoke type permanent magnet vernier machine. IEEE Access 2021, 9, 64179–64188. [Google Scholar] [CrossRef]
- Gorginpour, H.H. Analysis and design considerations of an axial-flux dual-rotor consequent-pole vernier-PM machine for direct-drive energy conversion systems. IET Renew. Power Gener. 2020, 14, 211–221. [Google Scholar] [CrossRef]
- Liu, C.; Wang, K.; Wang, S. Analysis and design optimization of a low-cost axial flux Vernier machine with SMC cores and ferrite magnets. Electr. Eng. 2020, 102, 2595–2604. [Google Scholar] [CrossRef]
- Kim, B.; Lipo, T. Operation and design principles of a PM vernier motor. IEEE Trans. Ind. Appl. 2014, 50, 3656–3663. [Google Scholar] [CrossRef]
- Niu, S.; Ho, S.; Fu, W.; Wang, L. Quantitative comparison of novel vernier permanent magnet machines. IEEE Trans. Magn. 2010, 46, 2032–2035. [Google Scholar] [CrossRef]
- Zhao, F.; Lipo, T.; Kwon, B. A novel dual-stator axial-flux spoke-type permanent magnet vernier machine for direct-drive applications. IEEE Trans. Magn. 2014, 50, 1–4. [Google Scholar] [CrossRef]
- Zou, T.; Li, D.; Qu, R.; Jiang, D.; Li, J. Advanced high torque density PM vernier machine with multiple working harmonics. IEEE Trans. Ind. Appl. 2017, 53, 5295–5304. [Google Scholar] [CrossRef]
- Jang, D.; Chang, J. Influences of winding MMF harmonics on torque characteristics in surface-mounted permanent magnet vernier machines. Energies 2017, 10, 580. [Google Scholar] [CrossRef] [Green Version]
- Zhu, L.; Jiang, S.; Zhu, Z.; Chan, C. Analytical methods for minimizing cogging torque in permanent-magnet machines. IEEE Trans. Magn. 2009, 45, 2023–2031. [Google Scholar] [CrossRef]
- Ueda, Y.; Takahashi, H. Transverse-flux motor design with skewed and unequally distributed armature cores for reducing cogging torque. IEEE Trans. Magn. 2017, 53, 1–5. [Google Scholar] [CrossRef]
- Hwang, S.; Eom, J.; Hwang, G.; Jeong, W.; Jung, Y. Cogging torque and acoustic noise reduction in permanent magnet motors by teeth pairing. IEEE Trans. Magn. 2000, 36, 3144–3146. [Google Scholar] [CrossRef]
- Zhu, Z.; Ruangsinchaiwanich, S.; Ishak, D.; Howe, D. Analysis of cogging torque in brushless machines having nonuniformly distributed stator slots and stepped rotor magnets. IEEE Trans. Magn. 2005, 41, 3910–3912. [Google Scholar] [CrossRef]
- Zhu, Z.Q.; Howe, D. Instantaneous magnetic field distribution in brushless permanent magnet DC motors. III. Effect of stator slotting. IEEE Trans. Magn. 1993, 29, 143–151. [Google Scholar] [CrossRef]
- Yang, J. Quantitative comparison for fractional-slot concentrated-winding configurations of permanent-magnet vernier machines. IEEE Trans. Magn. 2013, 49, 3826–3829. [Google Scholar] [CrossRef]
- Cros, J.; Viarouge, P. Synthesis of high performance PM motors with concentrated windings. IEEE Trans. Energy Convers. 2002, 17, 248–253. [Google Scholar] [CrossRef]
- Zou, T.; Qu, R.; Li, D.; Jiang, D. Synthesis of Fractional-Slot Vernier Permanent Magnet Machines. In Proceedings of the International Conference on Electrical Machines (ICEM), Lausanne, Switzerland, 4–7 September 2016; pp. 911–917. [Google Scholar]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Item | - | Item | - | ||
|---|---|---|---|---|---|
| Stator tooth | Outer radius Rto | 31.75 mm | Magnet | Outer radius Rmo | 32.95 mm |
| Inner radius Rti | 29.75 mm | Inner radius Rmi | 28.8 mm | ||
| Tooth height h | 5.9 mm | Height gm | 3 mm | ||
| Airgap length g | 0.3 mm | No. of rotor pole-pairs Zr | 16 | ||
| No. of stator slots Zs | 18 | Winding pole-pairs p | 2 | ||
| Magnet material | NdFeB | Br | 1.23 T | ||
| Spatial Harmonic Order of the Proposed Machine | ||
|---|---|---|
| MMF (nZr) | Permeance (mZf) | Flux Density (|nZr ± mZs|) |
| 16 | 0 | 16 |
| 6 | 10 | |
| 12 | 4 | |
| 18 | 2 | |
| 24 | 8 | |
| 30 | 14 | |
| n | MMF of Winding | Flux Density | MMF of Magnets | Permeance | |
|---|---|---|---|---|---|
| Order | Equation (22) | ||||
| 0 | p | p | Zs−Zr | Zr | Zs |
| 1 | 2 p | 2 p | Zr−Zfn | Zfn | |
| 4 p | 4 p | Zfn + 2Zf−Zr | Zfn + 2Zf | ||
| 2 | 5 p | 5 p | Zr−(Zfn−Zf) | Zfn−Zf | |
| 7 p | 7 p | Zfn + 3Zf−Zr | Zfn + 3Zf | ||
| 3 | 8 p | 8 p | Zr−(Zfn−2Zr) | Zfn−2Zf | |
| 10 p | 10 p | Zfn + 4Zf−Zr | Zfn + 4Zf | ||
| Items | Unit | Regular | Proposed |
|---|---|---|---|
| No. of tooth units Zf | - | - | 6 |
| No. of tooth in each unit ng | - | - | 3 |
| Width of main tooth θ1 | deg | 7.87 | 7.87 |
| Width of auxiliary tooth on the left θ2 | deg | 12.13 | 15.93 |
| Width of slot between main and auxiliary tooth θ3 | deg | 7.87 | 7.87 |
| Tooth pitch between main and auxiliary tooth τt | deg | 20 | 23.8 |
| Slot pitch between main and auxiliary slot τs | deg | 20 | 18.1 |
| Method | Back-EMF (mV) | Torque (mNm) | Torque Ripple | Cogging Torque Peak to Peak (mNm) |
|---|---|---|---|---|
| Regular machine | 288.59 | 66.6 | 5.7% | 3.27 |
| Proposed machine | 359.78 | 82.5 | 4.5% | 3.89 |
| Increment | 24.7% | 23.9% | - | 18.9% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, F.; Cao, M.; Tao, E.; Li, L. Design and Analysis of a Permanent Magnet Vernier Machine with Non-Uniform Tooth Distribution. Energies 2021, 14, 7816. https://doi.org/10.3390/en14227816
Zhao F, Cao M, Tao E, Li L. Design and Analysis of a Permanent Magnet Vernier Machine with Non-Uniform Tooth Distribution. Energies. 2021; 14(22):7816. https://doi.org/10.3390/en14227816
Chicago/Turabian StyleZhao, Fei, Mengzhu Cao, Encheng Tao, and Liyi Li. 2021. "Design and Analysis of a Permanent Magnet Vernier Machine with Non-Uniform Tooth Distribution" Energies 14, no. 22: 7816. https://doi.org/10.3390/en14227816
APA StyleZhao, F., Cao, M., Tao, E., & Li, L. (2021). Design and Analysis of a Permanent Magnet Vernier Machine with Non-Uniform Tooth Distribution. Energies, 14(22), 7816. https://doi.org/10.3390/en14227816