
Effectiveness of Power Electronic Controllers in Mitigating Acoustic Noise and Vibration in High-Rotor Pole SRMs

 ,
,
Abstract
:
1. Introduction
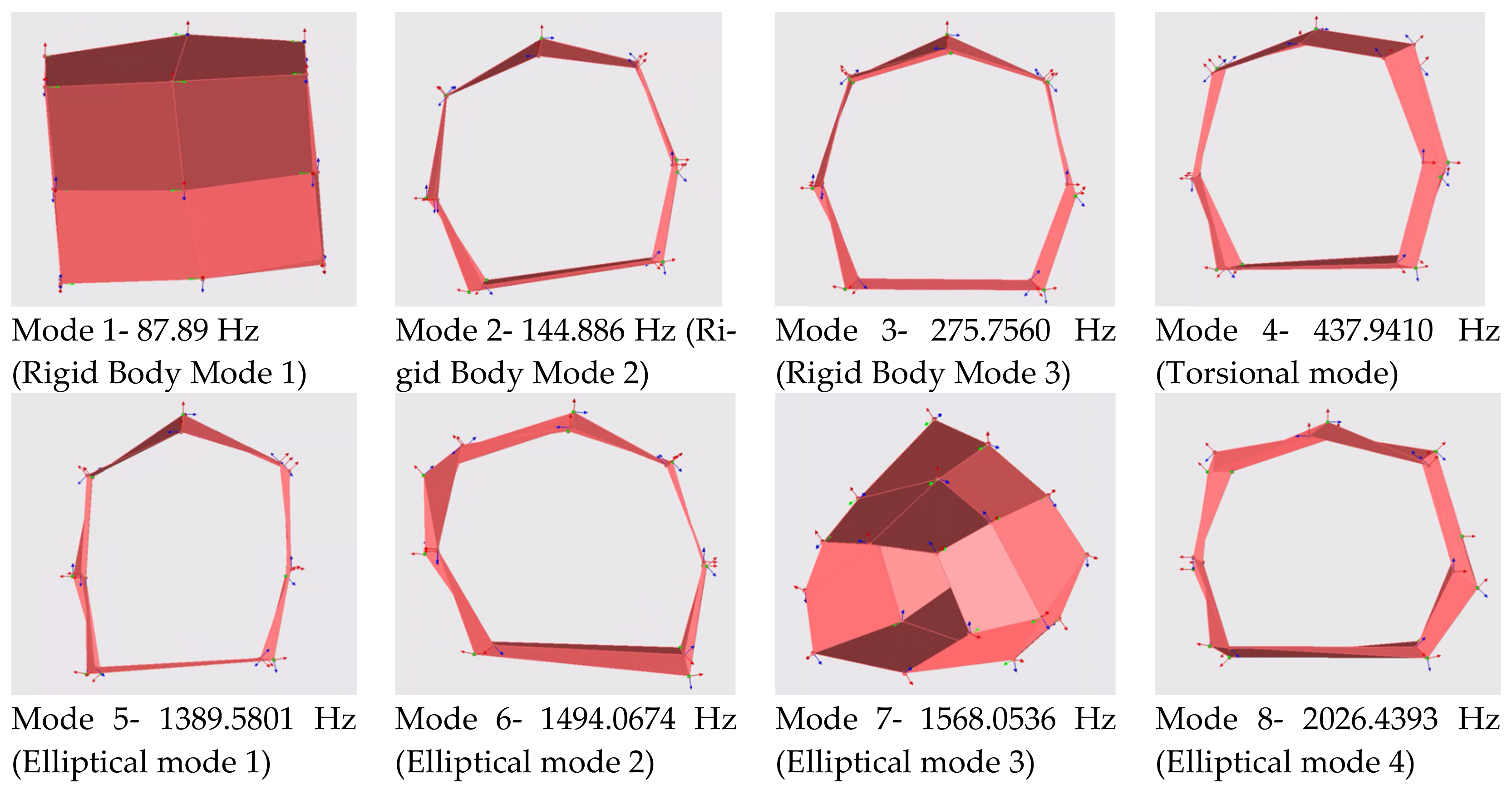
2. Fundamentals of NVH
3. Power Electronic Control and NVH in SRMs
3.1. Phase Advancing Approach
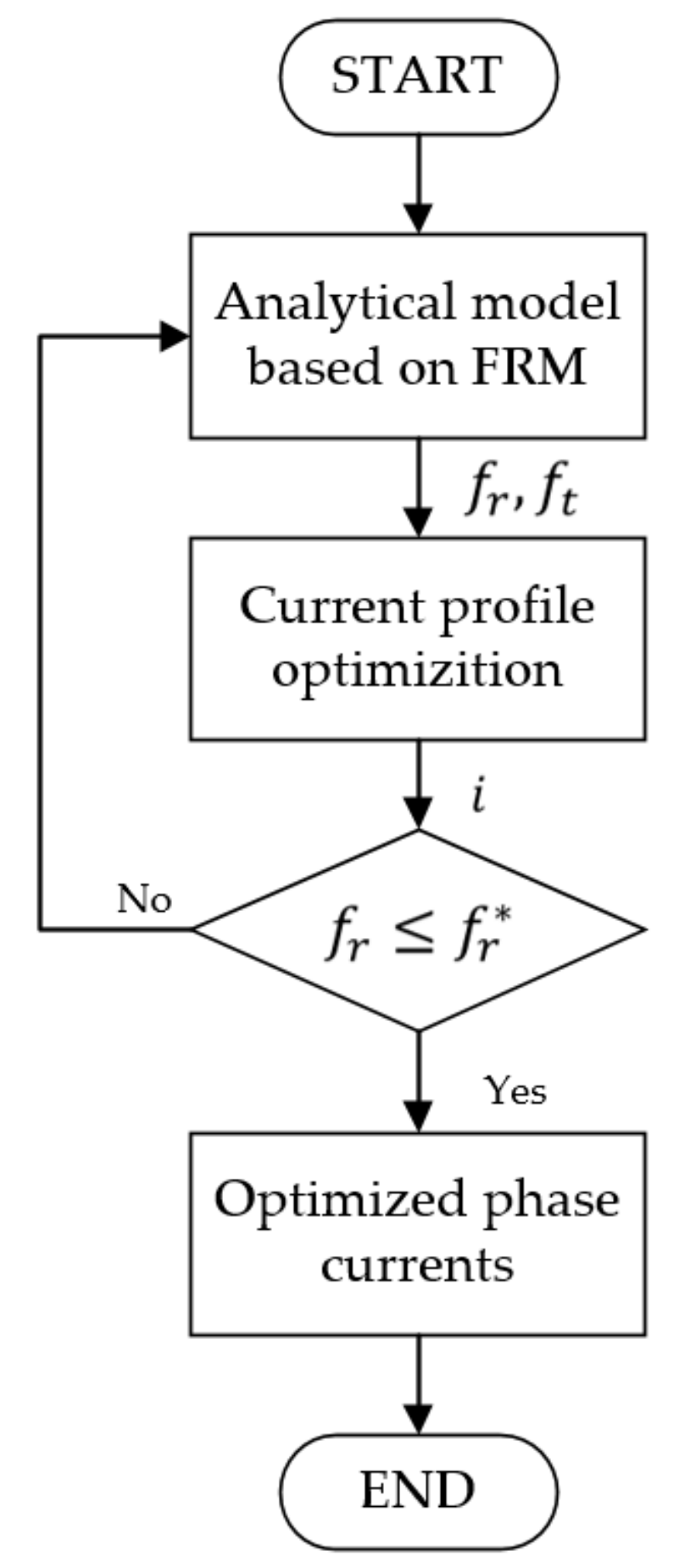
3.2. Current Shaping Based on Field Reconstruction Approach
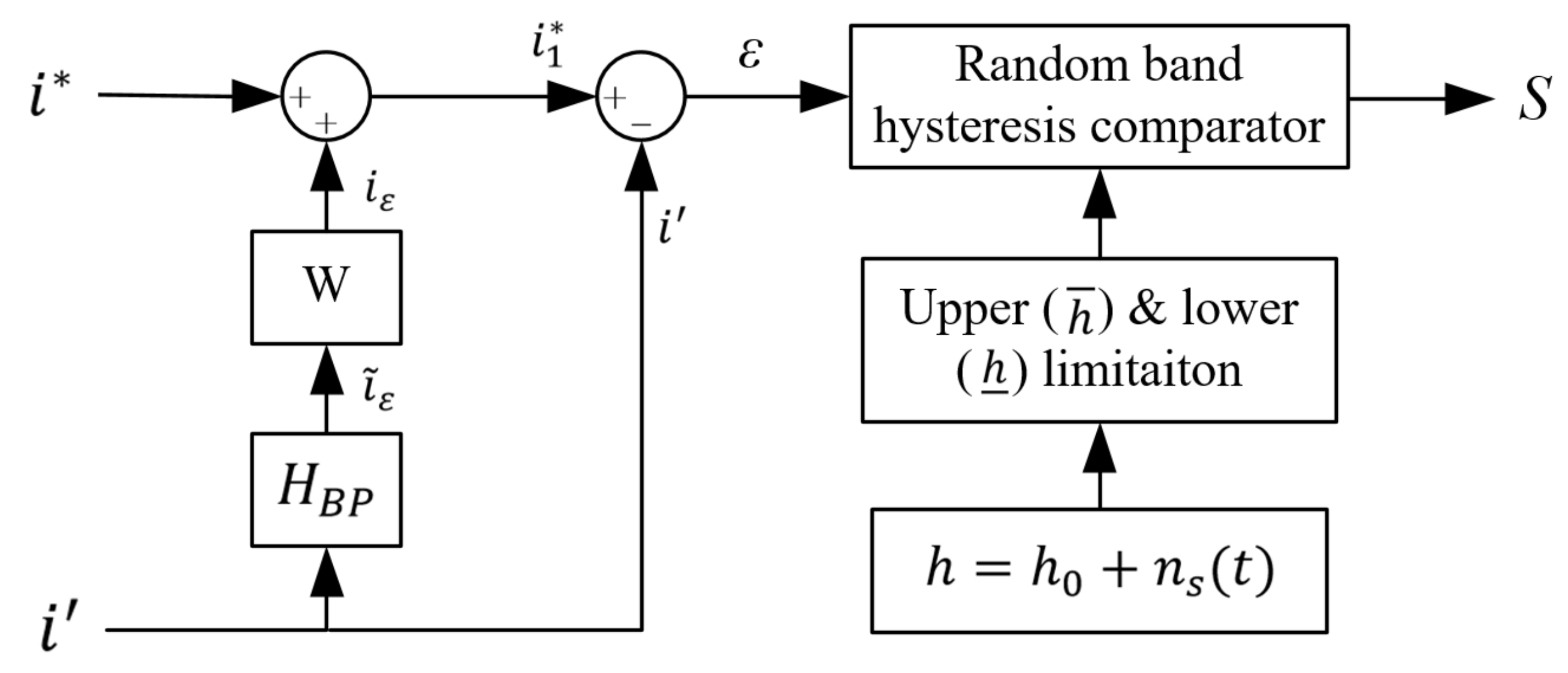
3.3. Switching with Random Hysteresis Band (RHB)
3.4. Random Hysteresis Band with Spectrum Shaping (RHB-SS)
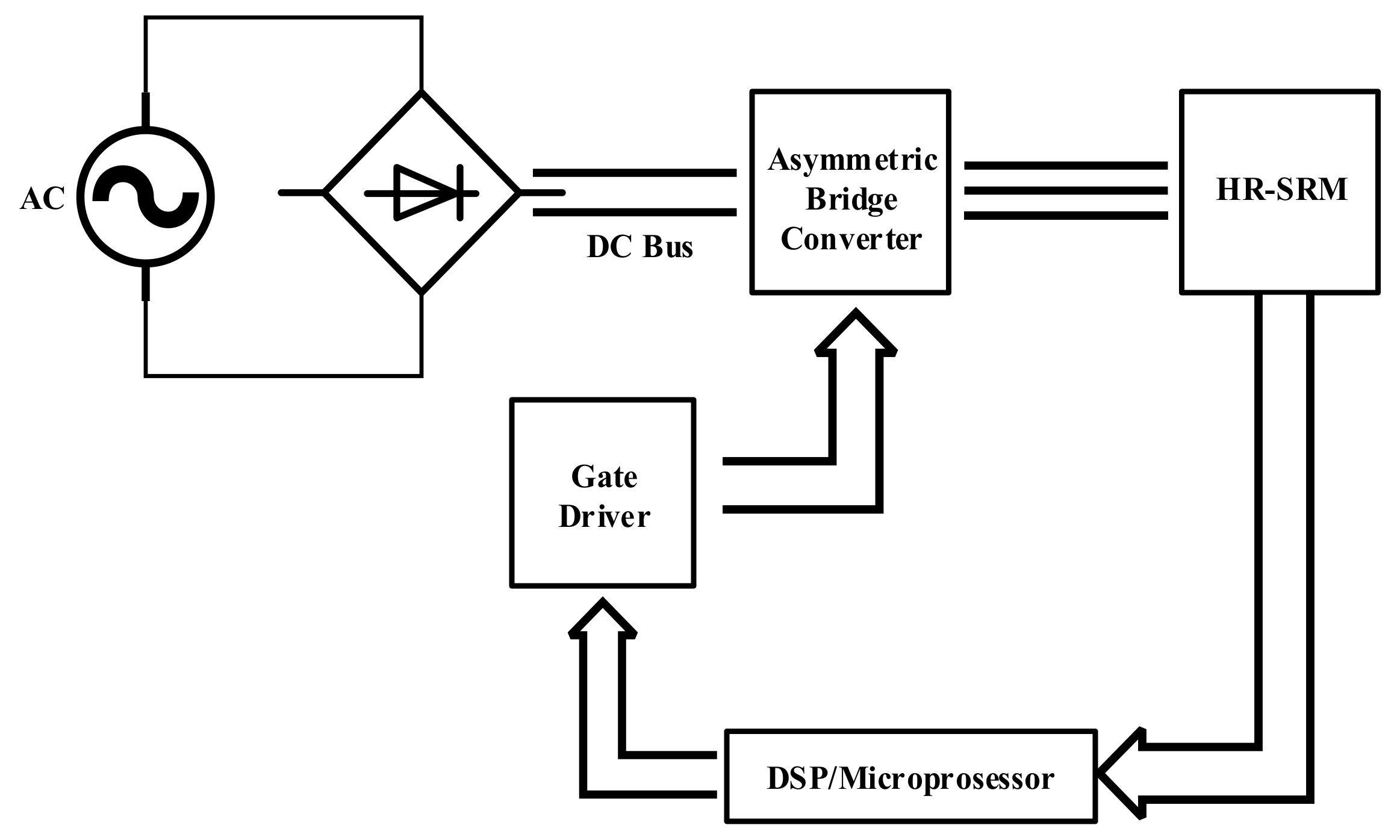
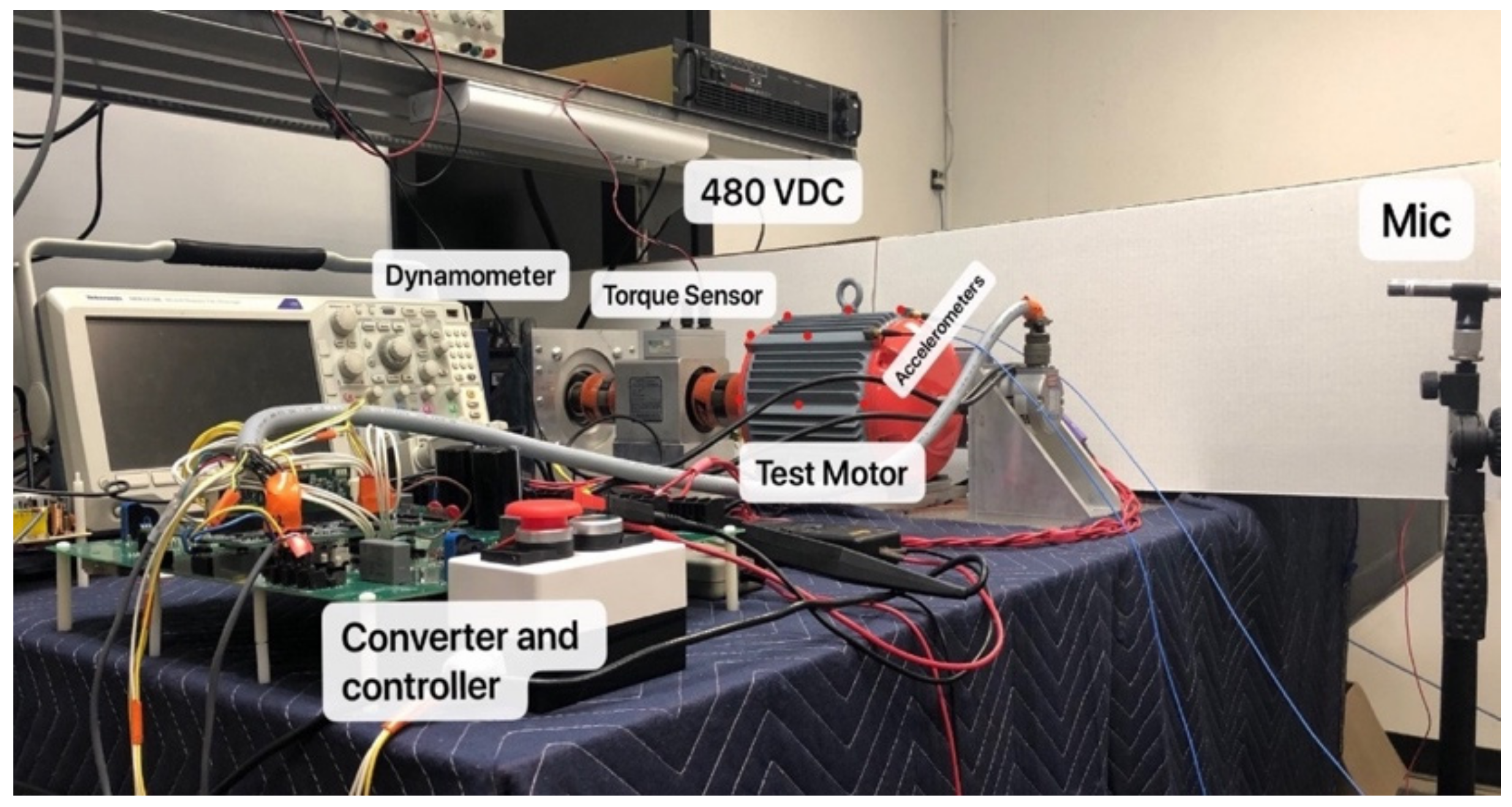
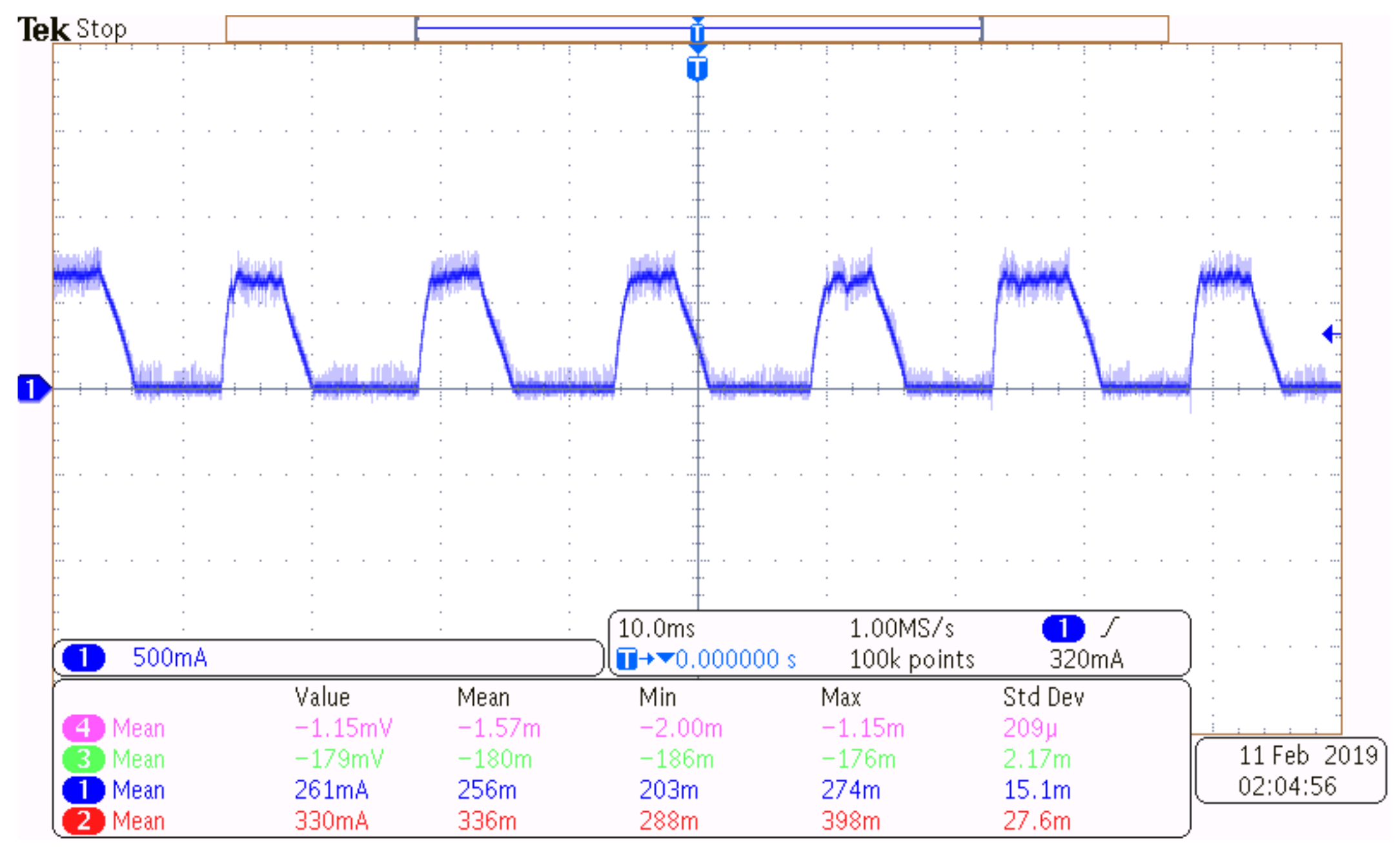
4. Experimental Setup and Validation
5. Results, Analysis, and Discussion
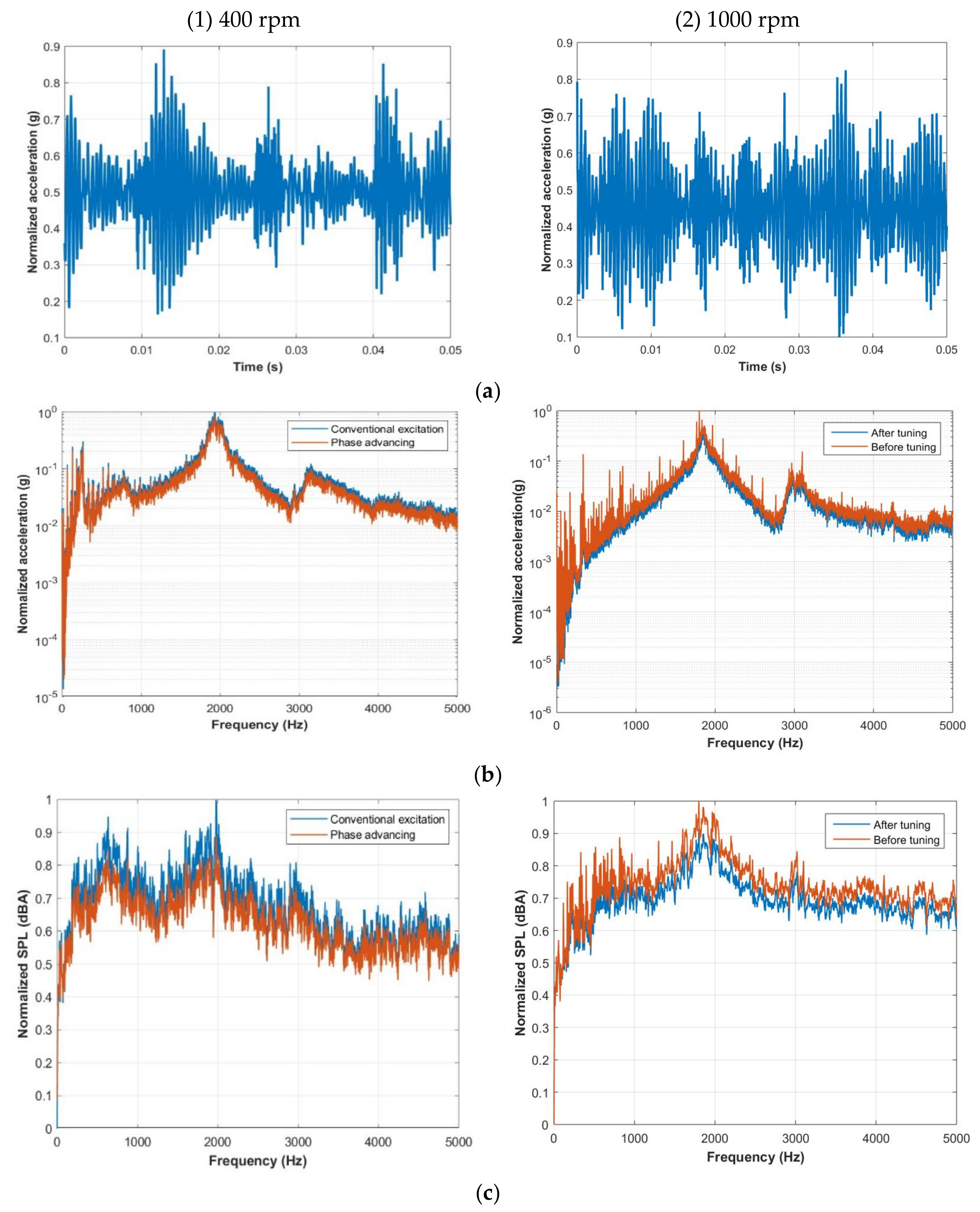
5.1. Phase Advancing Approach
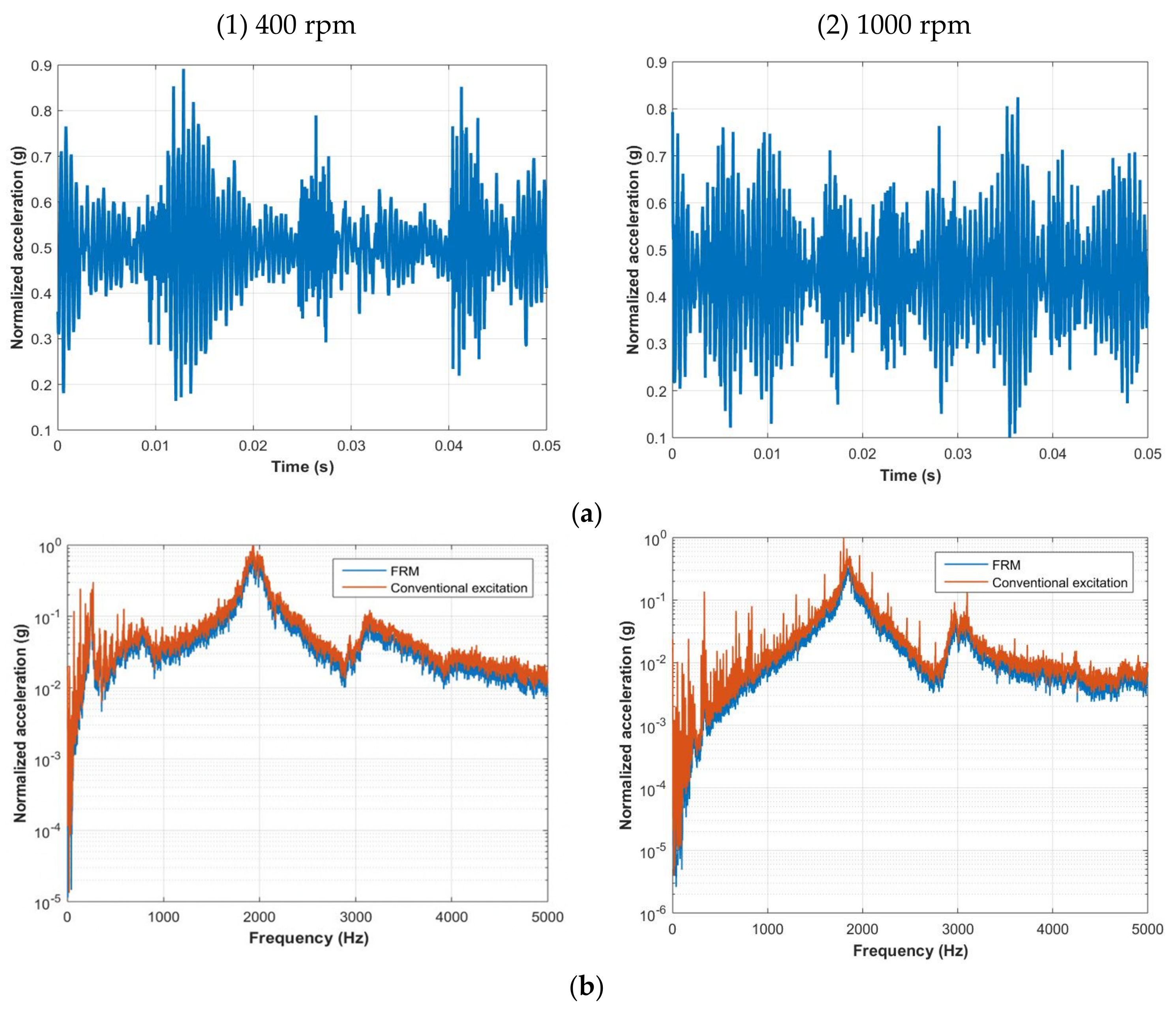
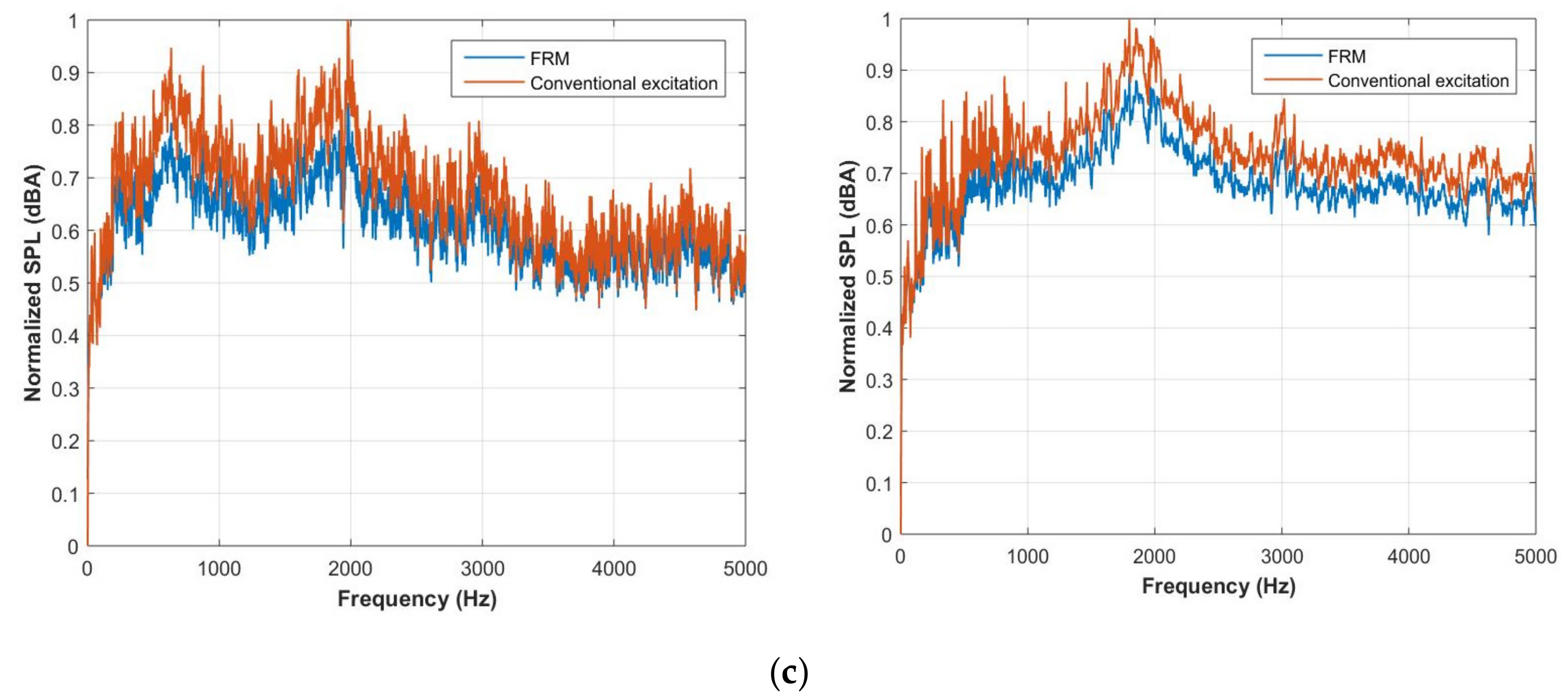
5.2. Field Reconstruction Method (FRM) Approach
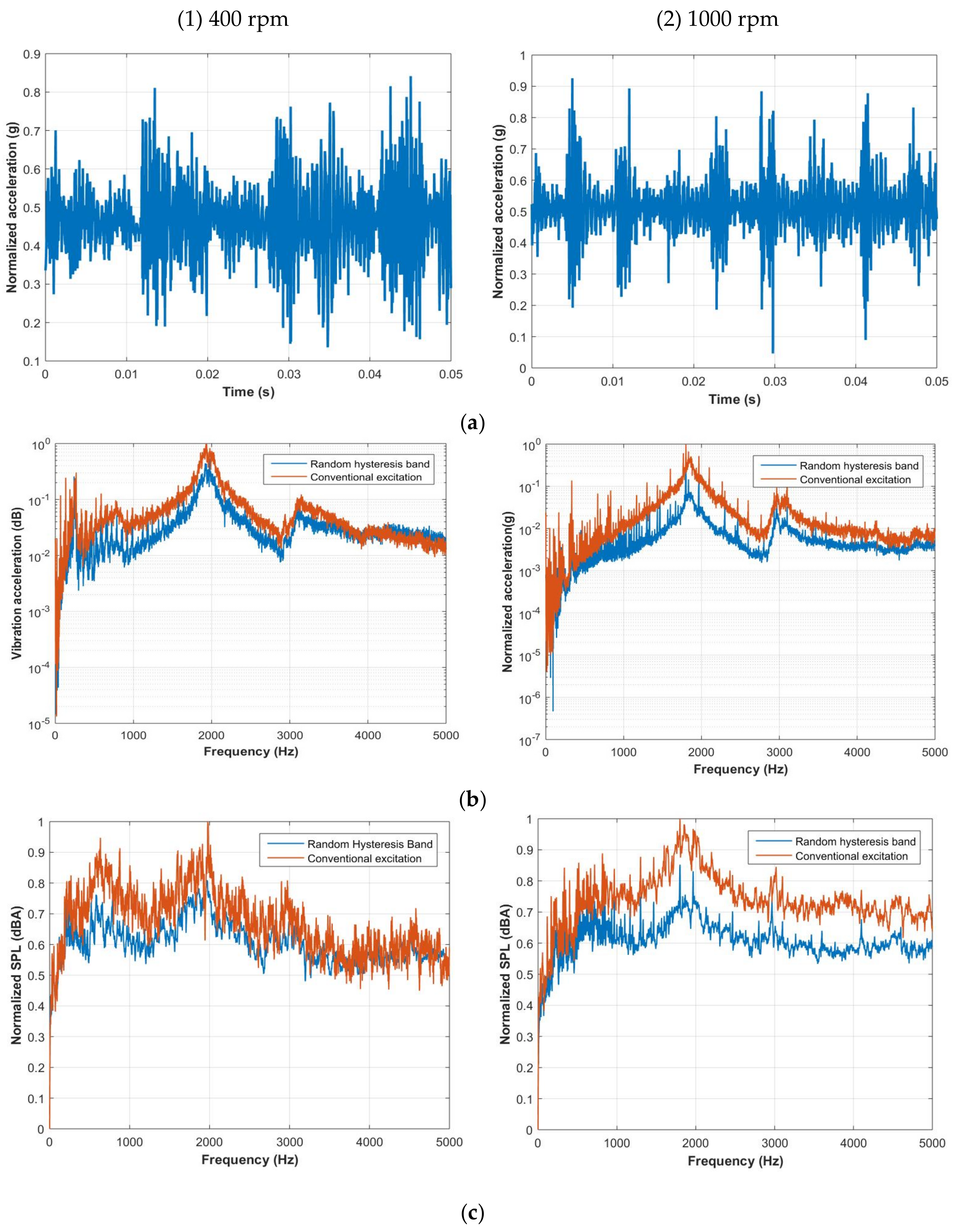
5.3. Random Hysteresis Band (RHB) Approach
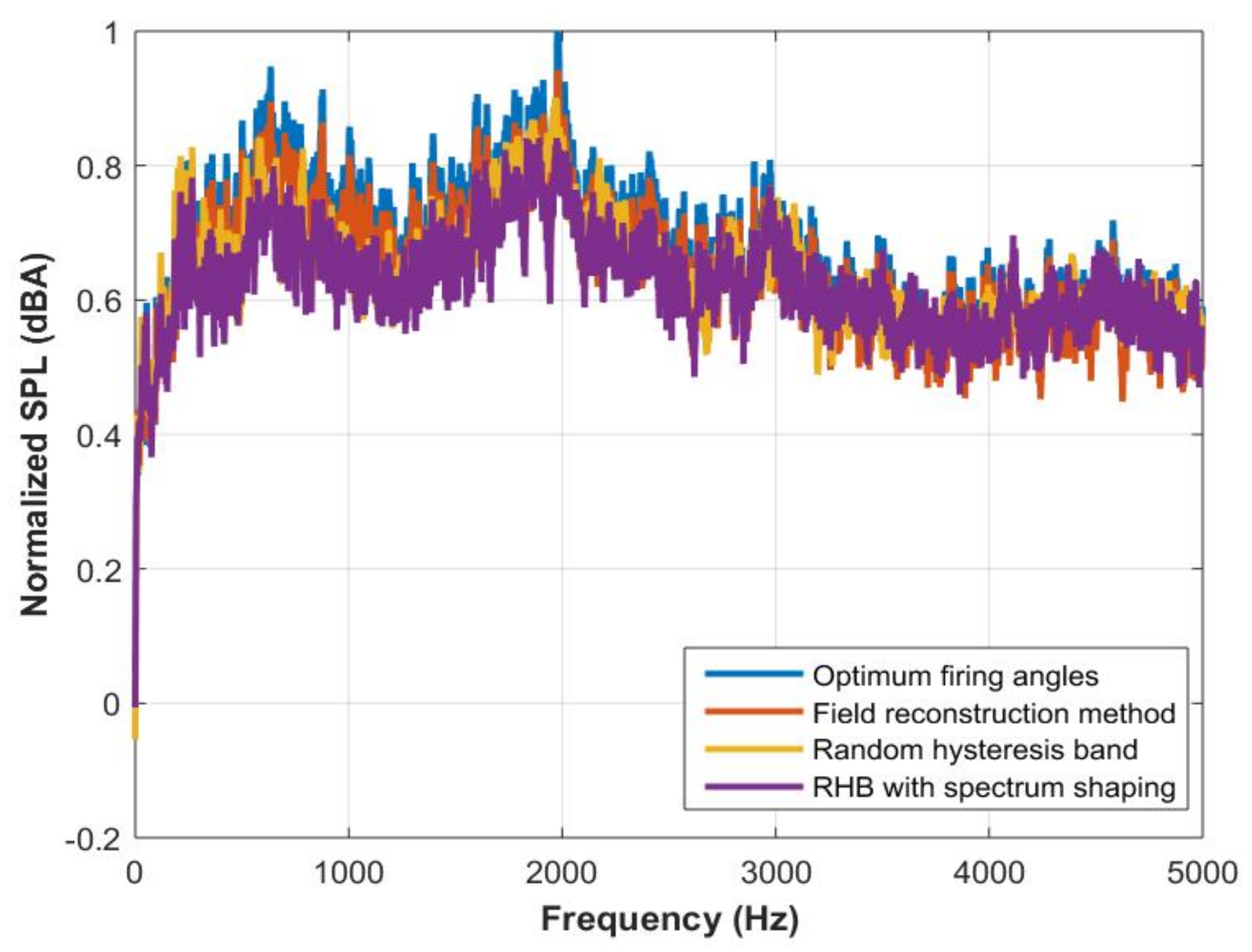
5.4. Random Hysteresis Band (RHB) Approach with Spectrum Shaping (RHB-SS)
6. Discussion
7. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Desai, P.C.; Krishnamurthy, M.; Schofield, N.; Emadi, A. Novel Switched Reluctance Machine Configuration with Higher Number of Rotor Poles than Stator Poles: Concept to Implementation. IEEE Trans. Ind. Electron. 2009, 57, 649–659. [Google Scholar] [CrossRef]
- Bilgin, B.; Emadi, A.; Krishnamurthy, M. Design Considerations for Switched Reluctance Machines with a Higher Number of Rotor Poles. IEEE Trans. Ind. Electron. 2012, 59, 3745–3756. [Google Scholar] [CrossRef]
- Ahn, J.-W.; Park, S.-J.; Lee, D.-H. Hybrid Excitation of SRM for Reduction of Vibration and Acoustic Noise. IEEE Trans. Ind. Electron. 2004, 51, 374–380. [Google Scholar] [CrossRef]
- Lin, F.-C.; Yang, S. An Approach to Producing Controlled Radial Force in a Switched Reluctance Motor. IEEE Trans. Ind. Electron. 2007, 54, 2137–2146. [Google Scholar] [CrossRef]
- Fiedler, J.O.; Kasper, K.A.; de Doncker, R.W. Calculation of the acoustic noise spectrum of SRM using modal superposition. IEEE Trans. Ind. Electron. 2010, 57, 2939–2945. [Google Scholar] [CrossRef]
- Husain, I. Minimization of torque ripple in SRM drives. IEEE Trans. Ind. Electron. 2002, 49, 28–39. [Google Scholar] [CrossRef]
- Islam, M.S.; Husain, I. Torque ripple minimization with indirect position and speed sensing for switched reluctance motors. IEEE Trans. Ind. Electron. 2000, 47, 1126–1133. [Google Scholar] [CrossRef]
- Cameron, D.E.; Lang, J.H.; Umans, S.D. The origin and reduction of acoustic noise in doubly salient variable-reluctance motors. IEEE Trans. Ind. Appl. 1992, 28, 1250–1255. [Google Scholar] [CrossRef]
- Wu, C.; Pollock, C. Analysis and reduction of vibration and acoustic noise in the switched reluctance drive. IEEE Trans. Ind. Appl. 1995, 31, 91–98. [Google Scholar] [CrossRef]
- Pollock, C.; Wu, C. Acoustic noise cancellation techniques for switched reluctance drives. IEEE Trans. Ind. Appl. 2002, 33, 477–484. [Google Scholar] [CrossRef]
- Michaelides, A.; Pollock, C. Reduction of noise and vibration in switched reluctance motors: New aspects. In Proceedings of the IAS ‘96. Conference Record of the 1996 IEEE Industry Applications Conference Thirty-First IAS Annual Meeting, San Diego, CA, USA, 6–10 October 1996; pp. 771–778. [Google Scholar]
- Chai, J.; Lin, Y.; Liaw, C. Comparative study of switching controls in vibration and acoustic noise reductions for switched reluctance motor. IEE Proc. Electr. Power Appl. 2006, 153, 348–360. [Google Scholar] [CrossRef] [Green Version]
- Ahn, J.-W.; Oh, S.-G.; Moon, J.-W.; Hwang, Y.-M. A three-phase switched reluctance motor with two-phase excitation. IEEE Trans. Ind. Appl. 1999, 35, 1067–1075. [Google Scholar] [CrossRef]
- Wang, S.; Zhan, Q.; Ma, Z.; Zhou, L. Implementation of a 50-kW four-phase switched reluctance motor drive system for hybrid electric vehicle. IEEE Trans. Magn. 2005, 41, 501–504. [Google Scholar] [CrossRef]
- Timar, P.L. Noise and Vibration of Electrical Machines; Elsevier: Amsterdam, The Netherlands, 1989. [Google Scholar]
- Yang, S.J. Low-Noise Electrical Motors; Clarendon Press: Oxford, UK, 1981. [Google Scholar]
- Colby, R.S.; Mottier, F.M.; Miller, T.J.E. Vibration modes and acoustic noise in a four-phase switched reluctance motor. IEEE Trans. Ind. Appl. 1996, 32, 1357–1364. [Google Scholar] [CrossRef] [Green Version]
- Leissa, A.W. Vibration of Shells, Scientific and Technical Information Office National Aeronautics and Space Administration; NASA: Washington, DC, USA, 1973. [Google Scholar]
- Srinivasan, R.; Sankaran, S. Vibration of cantilever cylindrical shells. J. Sound Vib. 1975, 40, 425–430. [Google Scholar] [CrossRef]
- Warburton, B.G. Vibration of thin cylindrical shells. J. Mech. Eng. Sci. 1965, 7, 399–407. [Google Scholar] [CrossRef]
- Al-Najafi, A.M.J.; Warburton, B.G. Free vibration of ring-stiffened cylindrical shells. J. Sound Vib. 1970, 13, 9–25. [Google Scholar]
- Chen, J.C.; Babcock, C.D. Nonlinear vibration of cylindrical shells. Am. Inst. Aeronaut. Astronaut. J. 1975, 13, 868–876. [Google Scholar] [CrossRef]
- Tang, Z.; Pillay, P.; Omekanda, A.M. Vibration prediction in switched reluctance motors with transfer function identification from shaker and force hammer tests. IEEE Trans. Ind. Appl. 2003, 39, 978–985. [Google Scholar] [CrossRef]
- Hunt, J.T.; Knittel, M.R.; Barach, D. Finite element approach to acoustic radiation from elastic structures. J. Acoust. Soc. Am. 1974, 55, 269. [Google Scholar] [CrossRef]
- Everstine, G. Finite element formulatons of structural acoustics problems. Comput. Struct. 1997, 65, 307–321. [Google Scholar] [CrossRef]
- Kagawa, Y.; Yamabuchi, T.; Sugihara, K.; Shindou, T. A finite element approach to a coupled structural-acoustic radiation system with application to loudspeaker characteristic calculation. J. Sound Vib. 1980, 69, 229–243. [Google Scholar] [CrossRef]
- Husain, O.; Anwar, M. Radial force calculation and acoustic noise prediction in switched reluctance machines. IEEE Trans. Ind. Appl. 2000, 36, 1589–1597. [Google Scholar] [CrossRef]
- Lecointe, J.; Romary, R.; Brudny, J.-F.; McClelland, M. Analysis and active reduction of vibration and acoustic noise in the switched reluctance motor. IEE Proc. Electr. Power Appl. 2004, 151, 725. [Google Scholar] [CrossRef]
- Callegaro, A.D.; Liang, J.; Jiang, J.W.; Bilgin, B.; Emadi, A. Radial Force Density Analysis of Switched Reluctance Machines: The Source of Acoustic Noise. IEEE Trans. Transp. Electrif. 2019, 5, 93–106. [Google Scholar] [CrossRef]
- Gieras, J.F.; Wang, C.; Lai, J.C. Noise of Polyphase Electric Motors; CRC Press: Boca Raton, FL, USA, 2018. [Google Scholar]
- Yasa, Y.; Elamin, M.; Sozer, Y.; Kutz, J.; Tylenda, J.S.; Wright, R.L. Acoustic noise mitigation for high pole count switched reluctance machines through skewing method with multiphysics FEA simulations. In Proceedings of the 2017 IEEE Energy Conversion Congress and Exposition (ECCE), Cincinnati, OH, USA, 1–5 October 2017; pp. 738–744. [Google Scholar]
- Zhang, H. Radial force reduction for switched reluctance motor with skewed slot structure based on FEM. J. Sci. Ind. Res. 2010, 69, 594–599. [Google Scholar]
- Li, Y.; Mi, C. Doubly-Salient Permanent-Magnet Machine with Skewed Rotor and Six-State Commutating Mode. IEEE Trans. Magn. 2006, 43, 3623–3629. [Google Scholar] [CrossRef]
- Yang, H.-Y.; Lim, Y.-C.; Kim, H.-C. Acoustic Noise/Vibration Reduction of a Single-Phase SRM Using Skewed Stator and Rotor. IEEE Trans. Ind. Electron. 2012, 60, 4292–4300. [Google Scholar] [CrossRef]
- Gan, C.; Wu, J.; Shen, M.; Yang, S.; Hu, Y.; Cao, W. Investigation of Skewing Effects on the Vibration Reduction of Three-Phase Switched Reluctance Motors. IEEE Trans. Magn. 2015, 51, 1–9. [Google Scholar] [CrossRef] [Green Version]
- Kiyota, K.; Kakishima, T.; Chiba, A.; Rahman, M.A. Cylindrical Rotor Design for Acoustic Noise and Windage Loss Reduction in Switched Reluctance Motor for HEV Applications. IEEE Trans. Ind. Appl. 2016, 52, 154–162. [Google Scholar] [CrossRef]
- Choi, Y.K.; Yoon, H.S.; Koh, C.S. Pole-Shape Optimization of a Switched-Reluctance Motor for Torque Ripple Reduction. IEEE Trans. Magn. 2007, 43, 1797–1800. [Google Scholar] [CrossRef]
- Fahimi, B.; Suresh, G.; Rahman, K.; Ehsani, M. Mitigation of acoustic noise and vibration in switched reluctance motor drive using neural network based current profiling. In Proceedings of the Conference Record of 1998 IEEE Industry Applications Conference. Thirty-Third IAS Annual Meeting (Cat. No.98CH36242), St. Louis, MO, USA, 12–15 October 1998. [Google Scholar]
- Boukhobza, T.; Gabsi, M.; Grioni, B. Random variation of control angles, reduction of SRM vibrations. IEEE Trans. Magn. 2001, 43. [Google Scholar] [CrossRef]
- Zhang, M.; Mininger, X.; Bahri, I.; Vlad, C. Improvement of the variable turn-off angle control for SRM regarding vibration reduction. IEEE Int. Electr. Mach. Drives Conf. 2017. [Google Scholar] [CrossRef]
- Orthmann, R.; Schoner, H.P. Turn-off angle control of switched reluctance motors for optimum torque output. Eur. Conf. Power Electron. Appl. 1993, 6, 20–25. [Google Scholar]
- Rodrigues, M.; Branco, P.J.C.; Suemitsu, W. Fuzzy logic torque ripple reduction by turn-off angle compensation for switched reluctance motors. IEEE Trans. Ind. Electron. 2001, 48, 711–715. [Google Scholar] [CrossRef]
- Scharfenstein, D.; Burkhart, B.; De Doncker, R.W.; Daniel, S. Influence of an FPGA-based switching angle dithering on acoustics in single-pulse controlled switched reluctance machines. In Proceedings of the 2015 IEEE 11th International Conference on Power Electronics and Drive Systems, Sydney, Australia, 9–12 June 2015; pp. 754–761. [Google Scholar]
- Lin, C.; Fahimi, B. Reduction of torque ripple in Switched Reluctance Motor drives using Field Reconstruction Method. In Proceedings of the 2011 IEEE Vehicle Power and Propulsion Conference, Chicago, IL, USA, 6–9 September 2011; pp. 1–5. [Google Scholar]
- Zhu, W.; Fahimi, B.; Pekarek, S. A Field Reconstruction Method for Optimal Excitation of Permanent Magnet Synchronous Machines. IEEE Trans. Energy Convers. 2006, 21, 305–313. [Google Scholar] [CrossRef]
- Chai, J.-Y.; Ho, Y.-H.; Chang, Y.-C.; Liaw, C.-M. On Acoustic-Noise-Reduction Control Using Random Switching Technique for Switch-Mode Rectifiers in PMSM Drive. IEEE Trans. Ind. Electron. 2008, 55, 1295–1309. [Google Scholar] [CrossRef]
- Bhattacharya, S.; Mascarella, D.; Joos, G.; Moschopoulos, G. A discrete random PWM technique for acoustic noise reduction in electric traction drives. In Proceedings of the 2015 IEEE Energy Conversion Congress and Exposition (ECCE), Montreal, QC, Canada, 20–24 September 2015; pp. 6811–6817. [Google Scholar]
- Yang, Z.; Yaman, S.; Krishnamurthy, M. Mitigation of electromagnetic vibration in PMSM: A rotor position related variable switching frequency technique. In Proceedings of the 2017 IEEE Transportation Electrification Conference and Expo (ITEC), Chicago, IL, USA, 22–24 June 2017; pp. 448–452. [Google Scholar]
- Long, S.; Zhu, Z.; Howe, D. Effectiveness of Active Noise and Vibration Cancellation for Switched Reluctance Machines Operating Under Alternative Control Strategies. IEEE Trans. Energy Convers. 2005, 20, 792–801. [Google Scholar] [CrossRef]
- Chai, J.-Y.; Chang, Y.-C.; Liaw, C.-M. On the Switched-Reluctance Motor Drive with Three-Phase Single-Switch Switch-Mode Rectifier Front-End. IEEE Trans. Power Electron. 2009, 25, 1135–1148. [Google Scholar] [CrossRef]
- Kang, B.; Liaw, C. Random hysteresis PWM inverter with robust spectrum shaping. IEEE Trans. Aerosp. Electron. Syst. 2001, 37, 619–629. [Google Scholar] [CrossRef]






















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Design Variable | Value |
|---|---|
| Rated power | 3 HP |
| Rated torque | 23 Nm |
| Rated speed | 900 RPM |
| Efficiency | >90% at rated speed |
| Phase Advancing | FRM | RHB | RHB-SS | |
|---|---|---|---|---|
| 400 rpm | 1 | 0.8960 | 0.8221 | 0.7142 |
| 1000 rpm | 1 | 0.8900 | 0.8298 | 0.07583 |
| Phase Advancing | FRM | RHB | RHB-SS | |
|---|---|---|---|---|
| 400 rpm | 88% | 90% | 92% | 92% |
| 1000 rpm | 93% | 89% | 93% | 94% |
| Vibration | ||||
|---|---|---|---|---|
| Phase advancing | FRM | RHB | RHB-SS | |
| 400 rpm | 16% | 24% | 38% | 31% |
| 1000 rpm | 28% | 21% | 23% | 26% |
| Acoustic Noise | ||||
| 400 rpm | 11% | 28% | 34% | 38% |
| 1000 rpm | 19% | 26% | 30% | 34% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, Z.; Yaman, S.; Salameh, M.; Singh, S.; Chen, C.; Krishnamurthy, M. Effectiveness of Power Electronic Controllers in Mitigating Acoustic Noise and Vibration in High-Rotor Pole SRMs. Energies 2021, 14, 702. https://doi.org/10.3390/en14030702
Zhang Z, Yaman S, Salameh M, Singh S, Chen C, Krishnamurthy M. Effectiveness of Power Electronic Controllers in Mitigating Acoustic Noise and Vibration in High-Rotor Pole SRMs. Energies. 2021; 14(3):702. https://doi.org/10.3390/en14030702
Chicago/Turabian StyleZhang, Ziyan, Selin Yaman, Mohamad Salameh, Suryadev Singh, Chengxiu Chen, and Mahesh Krishnamurthy. 2021. "Effectiveness of Power Electronic Controllers in Mitigating Acoustic Noise and Vibration in High-Rotor Pole SRMs" Energies 14, no. 3: 702. https://doi.org/10.3390/en14030702
APA StyleZhang, Z., Yaman, S., Salameh, M., Singh, S., Chen, C., & Krishnamurthy, M. (2021). Effectiveness of Power Electronic Controllers in Mitigating Acoustic Noise and Vibration in High-Rotor Pole SRMs. Energies, 14(3), 702. https://doi.org/10.3390/en14030702