
Analysis of Transient Interactions between a PWR Nuclear Power Plant and a Faulted Electricity Grid



Abstract
:1. Introduction
2. Mathematical Model of a PWR Nuclear Power Plant
2.1. Core Neutronics Model
2.1.1. Reactor Point Kinetics
2.1.2. Ex-Core Detectors
2.1.3. Reactivity Feedback
2.2. Thermal-Hydraulics Model
2.2.1. Fuel-Coolant Node
2.2.2. Resistance Temperature Detectors
2.3. Piping and Plenum Model
2.4. Steam Generator Model
2.5. Pressuriser Model
2.6. Turbine-Governor Model
2.6.1. Turbine
2.6.2. Turbine-Governor Valve
2.7. Dynamic Shaft Model
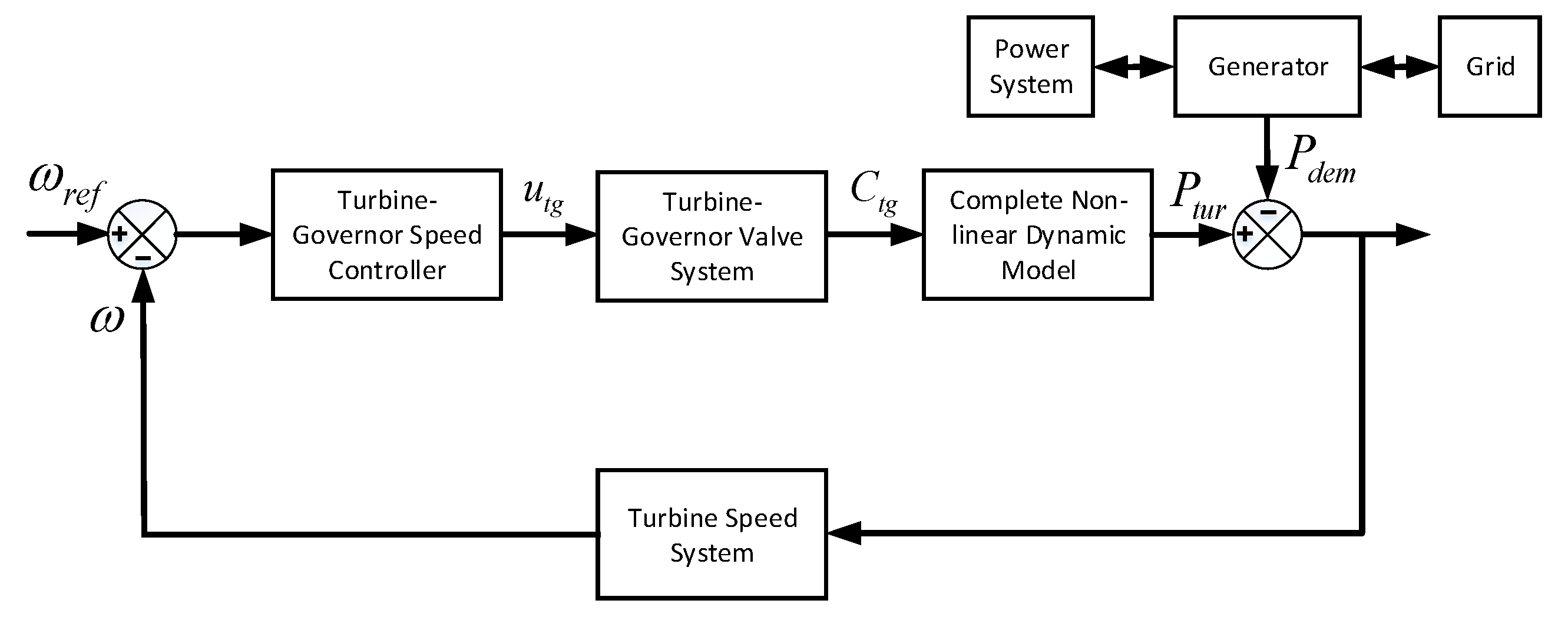
2.8. Turbine-Speed Control Loop
3. Transient Stability Enhancement Components
3.1. Automatic Voltage Regulator
3.2. Power System Stabiliser
3.2.1. Generic Power System Stabiliser
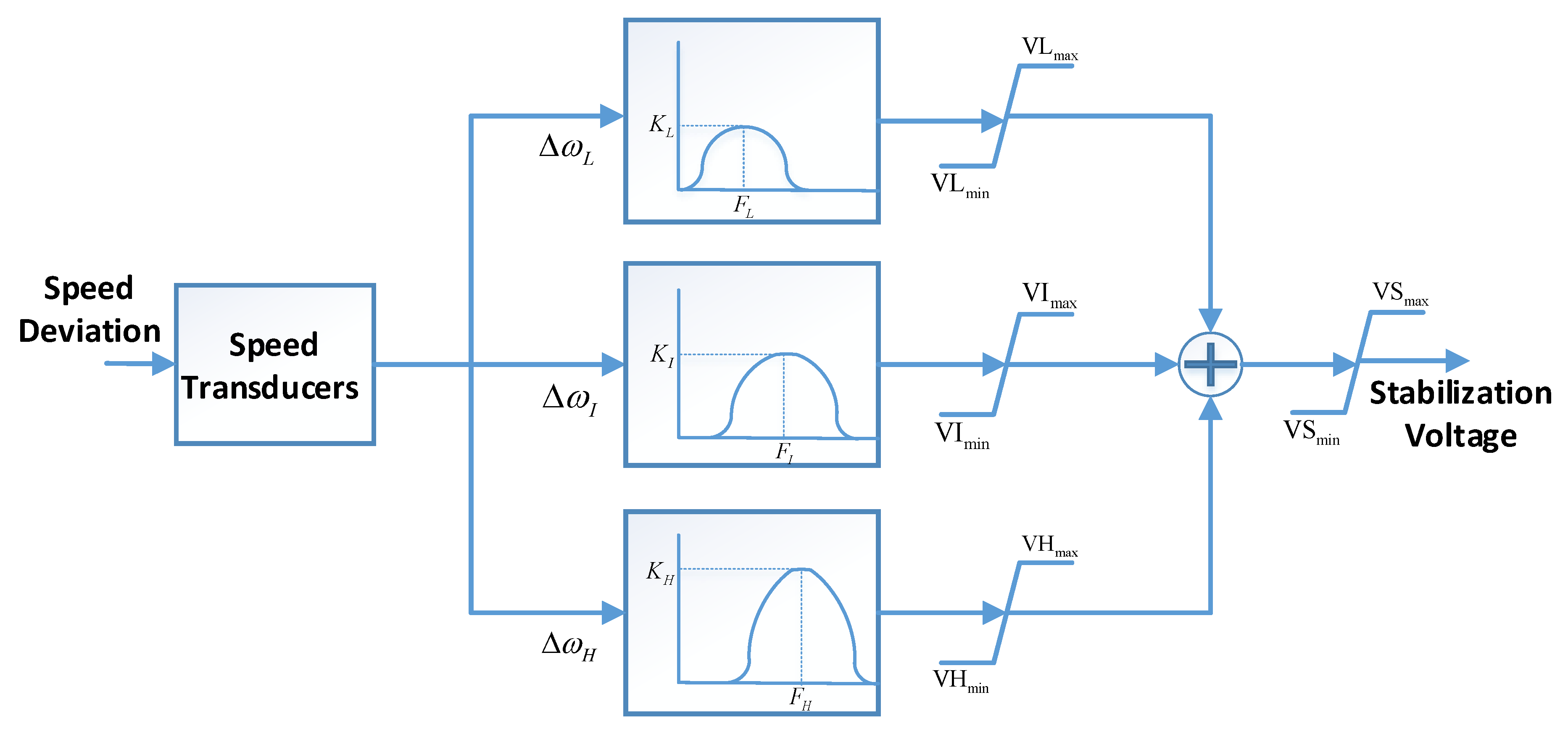
3.2.2. Multi-Band Power System Stabiliser
3.3. Flexible AC Transmission System
3.3.1. Static Var Compensator
3.3.2. Static Synchronous Compensator
4. Connection, Interaction, and Coordination among Nuclear Power Plant, Grid, and Protection Systems
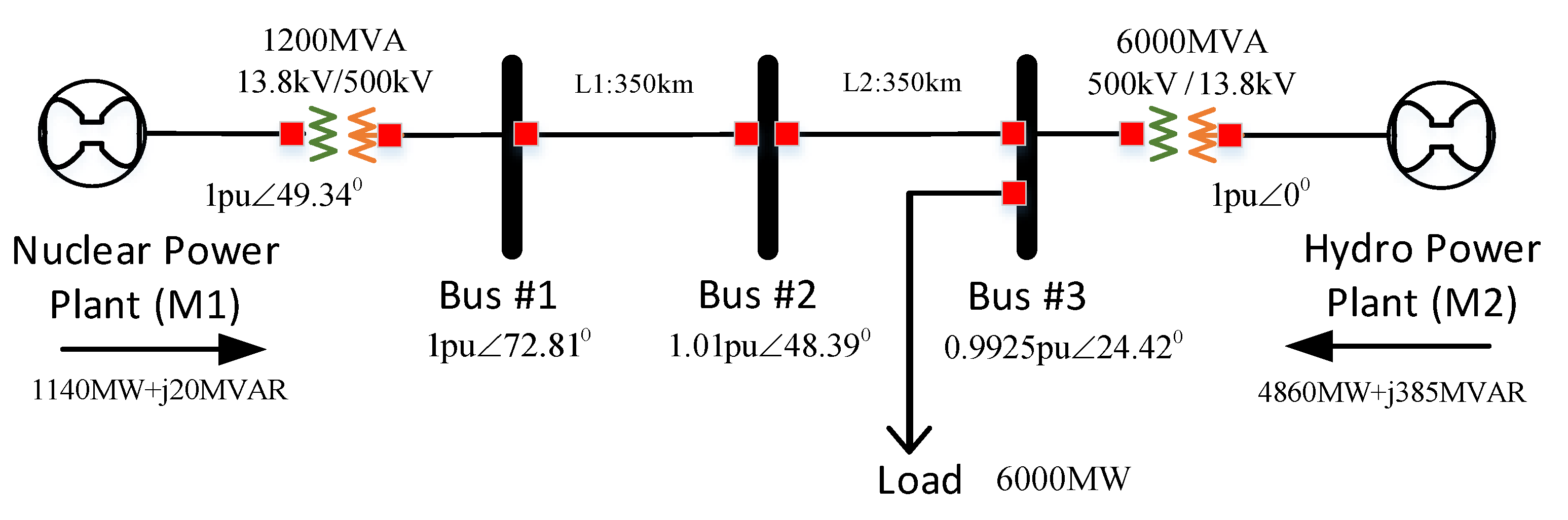
4.1. Connection
4.2. Interaction
4.3. Coordination
5. Simulation Cases, Results, and Discussion
5.1. Case I: Response under Single-Phase Fault
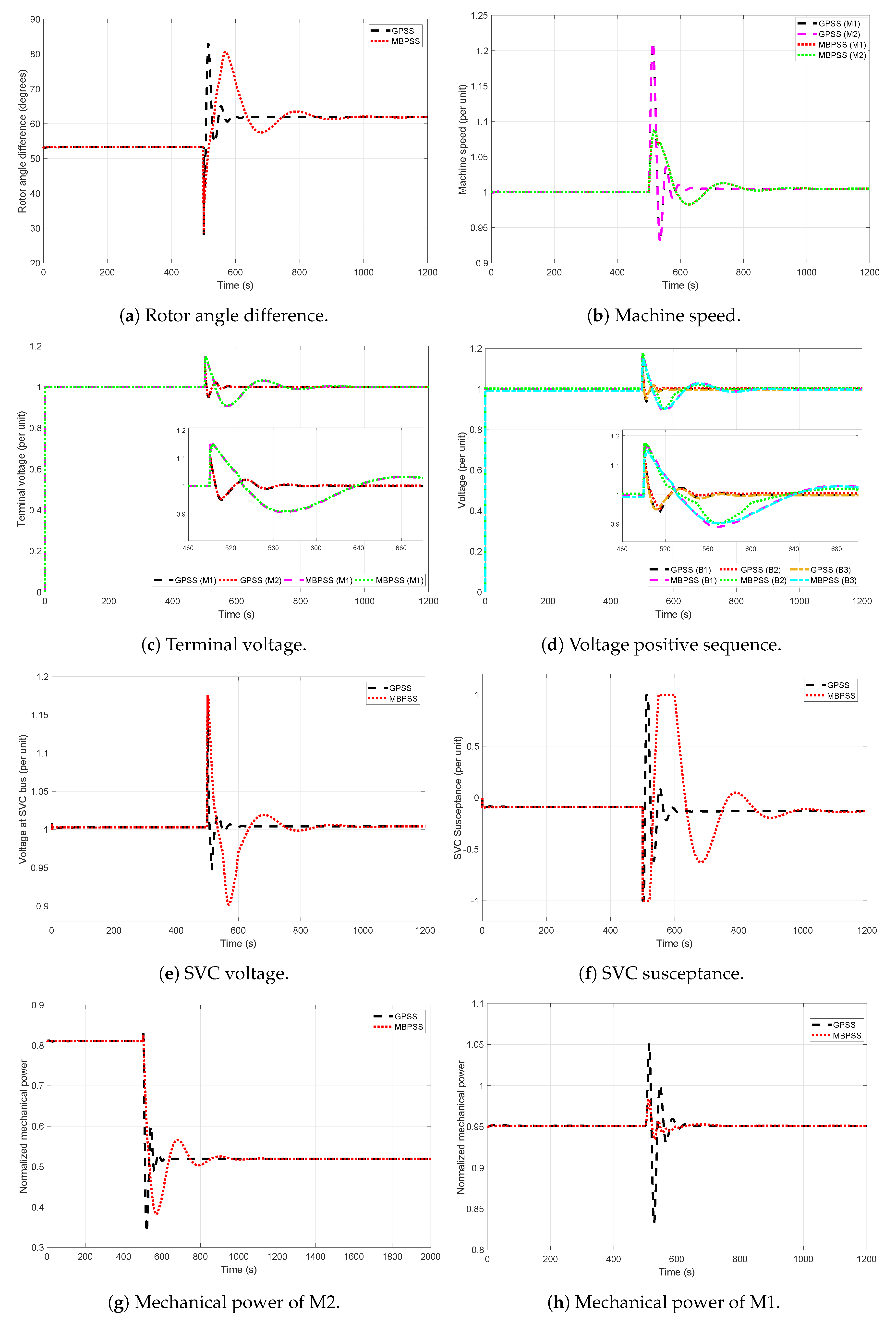
5.2. Case II: Response under Three-Phase Fault
5.2.1. PSS and SVC
5.2.2. PSS and STATCOM
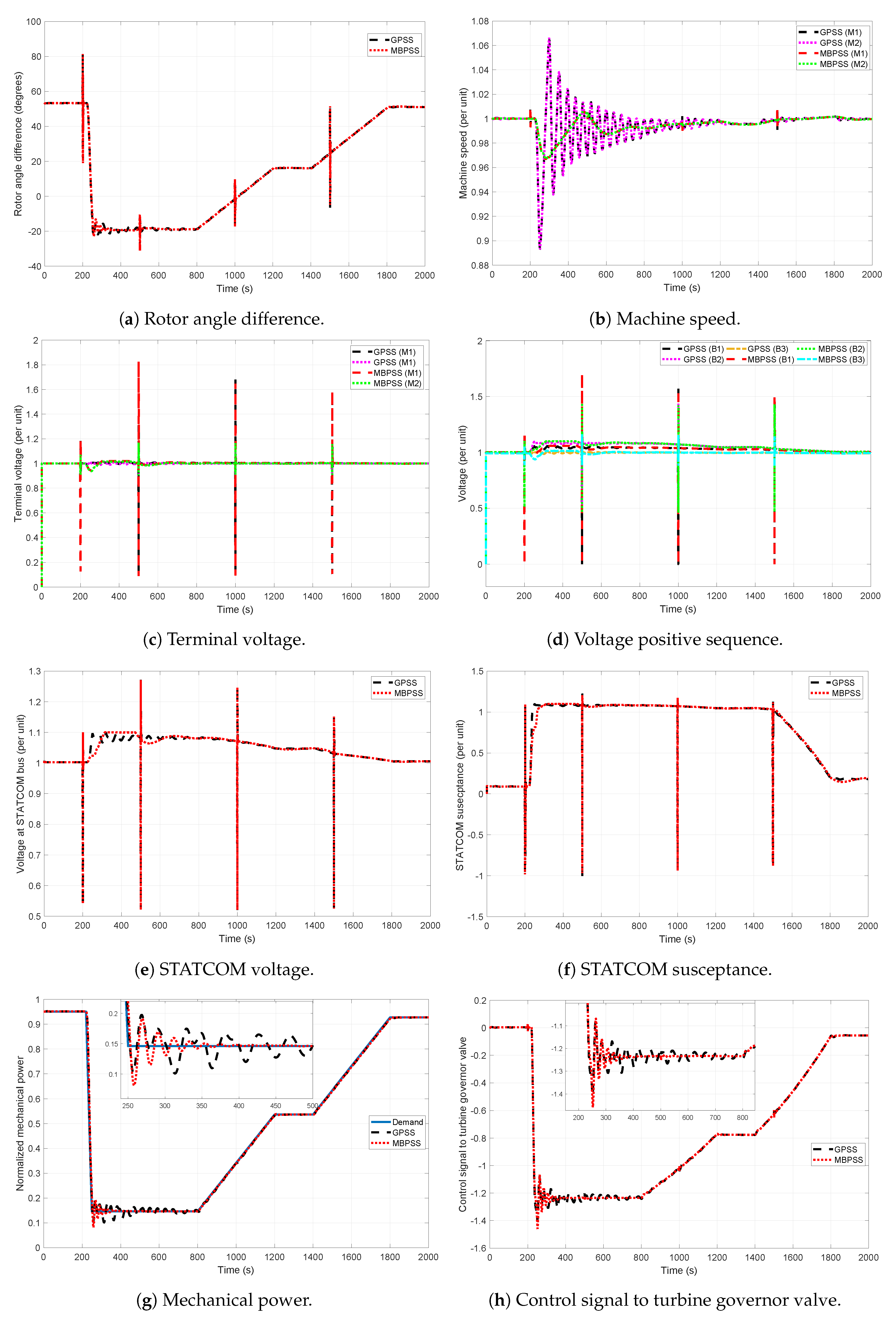
5.3. Case III: Response under Permanent Load Loss
5.3.1. PSS and SVC
5.3.2. PSS and STATCOM
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Protection System | Standard |
|---|---|
| AC distribution system, Electrical circuit | IEEE Std 242-1986 |
| protection, Diesel generator protection | |
| Motor protection system | IEEE Std 242-1986, IEEE Std C37.96-1988, |
| IEEE Std 666-1991 | |
| Power transformer protection | IEEE Std C37.91-1985, IEEE Std 666-1991 |
| Feeder circuit to power distribution | IEEE Std 141-1993, IEEE Std 242-1986 |
| panel protection | |
| Isolation and separation of non-class-1E | IEEE Std 384-1992 |
| circuits from class-1E circuits | |
| Surge protection of equipments and systems | IEEE Std 141-1993, IEEE Std 242-1986 |
| Surge protection of induction motors | IEEE Std C37.96-1988 |
| Protection of wire line facilities | IEEE Std 487-1992 |
| Circuits with solid-state equipments | IEEE Std 518-1982 |
| Surge arresters | IEEE Std C62.2-1987 |
| Surge voltage determination | IEEE Std C62.41-1991 |
| Surge withstand capability | IEEE Std C62.45-1992 |
| Protection for batteries | IEEE Std 946-1992 |
| Protection of battery chargers, inverters | IEEE Std 446-1987 |
| Ground protection practices | IEEE Std 142-1991, IEEE Std C62.92.3-1993 |
| Alarms and indication | IEEE Std 944-1986 |
| Electrical penetration | IEEE Std 317-1983 |
| Generator 1 and 2 | ||||||
| Line-to-Line | Frequency | Stator | Inertia | Pole | Reactances | |
| Voltage (kV) | (Hz) | Resistance (pu) | Coefficient (s) | Pairs | (pu) | |
| 13.8 | 60 | 0.002854 | 3.7 | 32 | , , , | |
| , , | ||||||
| Excitation System 1 and 2 | ||||||
| LPF Time | Regulator | Regulator Time | Damping | Damping Filter | Exciter | Exciter Time |
| Constant (s) | Gain | Constant (s) | Filter Gain | Time Constant (s) | Gain | Constant (s) |
| 0.02 | 200 | 0.001 | 0.001 | 0.1 | 1 | 0 |
| Generic PSS | ||||||
| Sensor Time | Gain | Wash-out Time | Lead-Lag 1 Time Constant (s) | Lead-Lag 2 Time Constant (s) | ||
| Constant (s) | Constant (s) | |||||
| 0.015 | 2 | 0.7 | , | , | ||
| Multiband PSS | ||||||
| Global | Low | Low Frequency | Intermediate | Intermediate | High | High Frequency |
| Gain | Frequency (Hz) | Gain | Frequency (Hz) | Frequency Gain | Frequency (Hz) | Gain |
| 1.0 | 0.025 | 5 | 0.8 | 25 | 12 | 145 |
| SVC | ||||||
| Nominal | Frequency | Three-phase Base | Average Time | Droop | Voltage Regulator | |
| Voltage (kV) | (Hz) | Power (MVA) | Delay (ms) | (pu/Pbase) | Gain (puB/puV/s) | |
| 500 | 60 | 200 | 4 | 0.03 | 300 | |
| STATCOM | ||||||
| Nominal | Frequency | Converter | Converter | DC Link | DC Link | |
| Voltage (kV) | (Hz) | Rating (MVA) | Impedance (pu) | Voltage (kV) | Capacitance (F) | |
| 500 | 60 | 100 | , | 40 | 350 | |
| Maximum Voltage | Droop | Regulator | Regulator | Current Regulator | ||
| Rate (pu/s) | (pu) | Gains | Gains | Gains | ||
| 10 | 0.03 | , | , | , , | ||
References
- Maldonado, G.I. The performance of North American nuclear power plants during the electric power blackout of 14 August 2003. In Proceedings of the IEEE Symposium Conference Record Nuclear Science 2004, Rome, Italy, 16–22 October 2004; Volume 7, pp. 4603–4606. [Google Scholar]
- Xuehao, H.; Xuecheng, Z.; Xiuming, Z.; Fulin, G.; Wenhua, Z. Pressurized water reactor nuclear power plant (NPP) modelling and the midterm dynamic simulation after NPP has been introduced into power system. In Proceedings of the TENCON ’93, IEEE Region 10 International Conference on Computers, Communications and Automation, Beijing, China, 19–21 October 1993; Volume 5, pp. 367–370. [Google Scholar]
- Inoue, T.; Ichikawa, T.; Kundur, P.; Hirsch, P. Nuclear plant models for medium- to long-term power system stability studies. IEEE Trans. Power Syst. 1995, 10, 141–148. [Google Scholar] [CrossRef]
- Ichikawa, T. Power Plant Dynamics Simulations Considering Interaction with Power System. In Proceedings of the IFAC Symposium on Control of Power Plants and Power Systems (CPSPP’97), Beijing, China, 18–21 August 1997; Volume 30, pp. 595–600. [Google Scholar]
- Gao, H.; Wang, C.; Pan, W. A Detailed Nuclear Power Plant Model for Power System Analysis Based on PSS/E. In Proceedings of the 2006 IEEE PES Power Systems Conference and Exposition, Atlanta, GA, USA, 29 October–1 November 2006; pp. 1582–1586. [Google Scholar]
- Li, X.; Liu, D.; Shi, X.; Zhao, J.; Wu, P. Research and Analyse for Pressurized Water Reactor Plant into Power System Dynamics Simulation. In Proceedings of the 2009 Asia-Pacific Power and Energy Engineering Conference, Wuhan, China, 28–30 March 2009; pp. 1–5. [Google Scholar]
- Li, X.; Liu, D.; Wang, B.; Wu, P.; Zhao, J.; Shi, X. Dynamic characteristics analyse of pressurized water reactor Nuclear Power plant based on PSASP. In Proceedings of the 2009 4th IEEE Conference on Industrial Electronics and Applications, Xi’an, China, 25–27 May 2009; pp. 3629–3634. [Google Scholar]
- Shi, X.; Wu, P.; Liu, D.; Li, X.; Zhao, J.; Zhang, Y.; Zhao, Z. Modeling and Dynamic Analysis of Nuclear Power Plant Reactor Based on PSASP. In Proceedings of the 2009 Asia-Pacific Power and Energy Engineering Conference, Wuhan, China, 28–30 March 2009; pp. 1–5. [Google Scholar]
- Zhao, J.; Wu, P.; Liu, D. User-Defined Modeling of Pressurized Water Reactor Nuclear Power Plant Based on PSASP and Analysis of its Characteristics. In Proceedings of the 2009 Asia-Pacific Power and Energy Engineering Conference, Wuhan, China, 28–30 March 2009; pp. 1–6. [Google Scholar]
- Othman, S.; Mahmoud, H.M.; Kotb, S.A. Interaction of a Nuclear Power Plant With the Egyptian Electrical Grid Based on PSS/E. In Proceedings of the 18th International Conference on Nuclear Engineering, Xi’an, China, 17–21 May 2010; Volume 1, pp. 27–32. [Google Scholar]
- Wu, G.; Song, X.; Lin, J.; Zhong, W.; Liu, T.; Ye, X.; Ju, P. Coordinated protection and control between large capacity nuclear power plants and power grids. In Proceedings of the 2013 IEEE Power Energy Society General Meeting, Vancouver, BC, Canada, 21–25 July 2013; pp. 1–5. [Google Scholar]
- Ju, P.; Wu, F.; Chen, Q.; Han, J.; Dai, R.; Wu, G.; Tang, Y. Model Simplification of Nuclear Power Plant for Power System Dynamic Simulation. In Proceedings of the 2018 International Conference on Control, Artificial Intelligence, Robotics Optimization (ICCAIRO), Prague, Czech Republic, 19–21 May 2018; pp. 260–266. [Google Scholar]
- Wen, L.; Sheng, W.; Xu, Z. Comparative analysis of external characteristics of nuclear power units and thermal power units. In Proceedings of the 2019 IEEE Innovative Smart Grid Technologies—Asia (ISGT Asia), Chengdu, China, 21–24 May 2019; pp. 1051–1056. [Google Scholar]
- Wang, L.; Zhao, J.; Liu, D.; Lin, Y.; Zhao, Y.; Lin, Z.; Zhao, T.; Lei, Y. Parameter Identification with the Random Perturbation Particle Swarm Optimization Method and Sensitivity Analysis of an Advanced Pressurized Water Reactor Nuclear Power Plant Model for Power Systems. Energies 2017, 10, 173. [Google Scholar] [CrossRef] [Green Version]
- Wu, G.; Ju, P.; Song, X.; Xie, C.; Zhong, W. Interaction and Coordination among Nuclear Power Plants, Power Grids and Their Protection Systems. Energies 2016, 9, 306. [Google Scholar] [CrossRef] [Green Version]
- Wang, L.; Sun, W.; Zhao, J.; Liu, D. A Speed-Governing System Model with Over-Frequency Protection for Nuclear Power Generating Units. Energies 2020, 13, 173. [Google Scholar] [CrossRef] [Green Version]
- Poudel, B.; Joshi, K.; Gokaraju, R. A Dynamic Model of Small Modular Reactor Based Nuclear Plant for Power System Studies. IEEE Trans. Energy Convers. 2020, 35, 977–985. [Google Scholar] [CrossRef]
- International Atomic Energy Agency. Introducing Nuclear Power Plants into Electrical Power Systems of Limited Capacity: Problems and Remedial Measures; International Atomic Energy Agency: Vienna, Austria, 1987. [Google Scholar]
- Kirby, B.; Kueck, J.; Leake, H.; Muhlheim, M. Nuclear Generating Stations and Transmission Grid Reliability. In Proceedings of the 2007 39th North American Power Symposium, Las Cruces, New Mexico, 30 September–2 October 2007; pp. 279–287. [Google Scholar]
- Wei-Jie, Z. Modeling and fault stability study for Million Kilowatts Nuclear Power Generator excitation system. In Proceedings of the 2014 International Conference on Power System Technology, Chengdu, China, 20–22 October 2014; pp. 244–250. [Google Scholar]
- Shafei, M.A.R.; Ibrahim, D.K.; El-Zahab, E.E.A. Transient stability enhancement of Egyptian national grid including nuclear power plant in Dabaa area. In Proceedings of the 2012 IEEE International Conference on Power and Energy (PECon), Kota Kinabalu, Malaysia, 2–5 December 2012; pp. 487–492. [Google Scholar]
- Abou-El-Soud, A.; Elbanna, S.H.A.; SABRY, W. A Strong Action Power System Stabilizer Application in a Multi-machine Power System Containing a Nuclear Power Plant. In Proceedings of the 2019 16th Conference on Electrical Machines, Drives and Power Systems (ELMA), Varna, Bulgaria, 6–8 June 2019; pp. 1–6. [Google Scholar]
- Kerlin, T.W. Dynamic Analysis and Control of Pressurized Water Reactors; Academic Press: Cambrige, MA, USA, 1978; Volume 14, pp. 103–212. [Google Scholar]
- Ali, M.R.A. Lumped Parameter, State Variable Dynamic Models for U-Tube Recirculation Type Nuclear Steam Generators. Ph.D. Dissertation, University of Tennessee, Knoxville, TN, USA, 1976. [Google Scholar]
- Naghedolfeizi, M. Dynamic Modeling of a Pressurized Water Reactor Plant for Diagnostics and Control. Master’s Thesis, University of Tennessee, Knoxville, TN, USA, 1990. [Google Scholar]
- Vajpayee, V.; Becerra, V.; Bausch, N.; Deng, J.; Shimjith, S.R.; Arul, A.J. Dynamic Modelling, Simulation, and Control Design of a Pressurized Water-type Nuclear Power Plant. Nucl. Eng. Des. 2020, 370, 110901. [Google Scholar] [CrossRef]
- Milano, F. Power System Modelling and Scripting. In Power Systems; Springer: Berlin/Heidelberg, Germany, 2010. [Google Scholar]
- Vajpayee, V.; Becerra, V.; Bausch, N.; Deng, J.; Shimjith, S.; Arul, A.J. Robust-optimal integrated control design technique for a pressurized water-type nuclear power plant. Prog. Nucl. Energy 2021, 131, 103575. [Google Scholar] [CrossRef]
- Vajpayee, V.; Becerra, V.; Bausch, N.; Deng, J.; Shimjith, S.; Arul, A.J. LQGI/LTR based robust control technique for a pressurized water nuclear power plant. Ann. Nucl. Energy 2021, 154, 108105. [Google Scholar] [CrossRef]
- Subudhi, C.S.; Bhatt, T.U.; Tiwari, A.P. A Mathematical Model for Total Power Control Loop of Large PHWRs. IEEE Trans. Nucl. Sci. 2016, 63, 1901–1911. [Google Scholar] [CrossRef]
- Kundur, P.; Paserba, J.; Ajjarapu, V.; Andersson, G.; Bose, A.; Canizares, C.; Hatziargyriou, N.; Hill, D.; Stankovic, A.; Taylor, C.; et al. Definition and classification of power system stability IEEE/CIGRE joint task force on stability terms and definitions. IEEE Trans. Power Syst. 2004, 19, 1387–1401. [Google Scholar] [CrossRef]
- Kundur, P. Power System Stability and Control; EPRI Power System Engineering Series McGraw-Hill: New York, NY, USA, 1994. [Google Scholar]
- Grondin, R.; Kamwa, I.; Soulieres, L.; Potvin, J.; Champagne, R. An approach to PSS design for transient stability improvement through supplementary damping of the common low-frequency. IEEE Trans. Power Syst. 1993, 8, 954–963. [Google Scholar] [CrossRef]
- Zhang, X.P.; Rehtanz, C.; Pal, B. FACTS-Devices and Applications; Flexible AC Transmission Systems: Modelling and Control; Springer: Berlin/Heidelberg, Germany, 2012; pp. 1–30. [Google Scholar]
- Hingorani, N.G.; Gyugyi, L. Understanding FACTS: Concepts and Technology of Flexible AC Transmission Systems; Wiley-IEEE Press: Piscataway, NJ, USA, 2000. [Google Scholar]
- International Atomic Energy Agency. Electric Grid Reliability and Interface with Nuclear Power Plants; Number NG-T-3.8 in Nuclear Energy Series; International Atomic Energy Agency: Vienna, Austria, 2012. [Google Scholar]
- Łowczowski, K. Nuclear Power Plants in the National Power System. Acta Energet. 2018, 2, 70–75. [Google Scholar]
- Mazzoni, O.S. Electrical Systems for Nuclear Power Plants; IEEE Press Wiley: Piscataway, NJ, USA, 2019. [Google Scholar]
- IEEE. IEEE Standard for Criteria for the Protection of Class 1E Power Systems and Equipment in Nuclear Power Generating Stations; IEEE Std 741-2017 (Revision of IEEE Std 741-2007); IEEE Press Wiley: Piscataway, NJ, USA, 2017; pp. 1–63. [Google Scholar]

















Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Vajpayee, V.; Top, E.; Becerra, V.M. Analysis of Transient Interactions between a PWR Nuclear Power Plant and a Faulted Electricity Grid. Energies 2021, 14, 1573. https://doi.org/10.3390/en14061573
Vajpayee V, Top E, Becerra VM. Analysis of Transient Interactions between a PWR Nuclear Power Plant and a Faulted Electricity Grid. Energies. 2021; 14(6):1573. https://doi.org/10.3390/en14061573
Chicago/Turabian StyleVajpayee, Vineet, Elif Top, and Victor M. Becerra. 2021. "Analysis of Transient Interactions between a PWR Nuclear Power Plant and a Faulted Electricity Grid" Energies 14, no. 6: 1573. https://doi.org/10.3390/en14061573
APA StyleVajpayee, V., Top, E., & Becerra, V. M. (2021). Analysis of Transient Interactions between a PWR Nuclear Power Plant and a Faulted Electricity Grid. Energies, 14(6), 1573. https://doi.org/10.3390/en14061573