
Robust Control of a PMSG-Based Wind Turbine Generator Using Lyapunov Function


 ,
,  ,
, 
Abstract
:1. Introduction
- A novel back-stepping finite-time controller is proposed for the PMSG-based wind generation system, and its stability and finite-time convergence are proved mathematically using the Lyapunov stability theorem.
- The proposed multi-loop output-feedback nonlinear FTC improves the control robustness against parameter uncertainty by the proper tuning of its control gains. The robustness of the FTC is verified using the perturbed WTG system with 20% parameter variation and a weak power grid at the PCC.
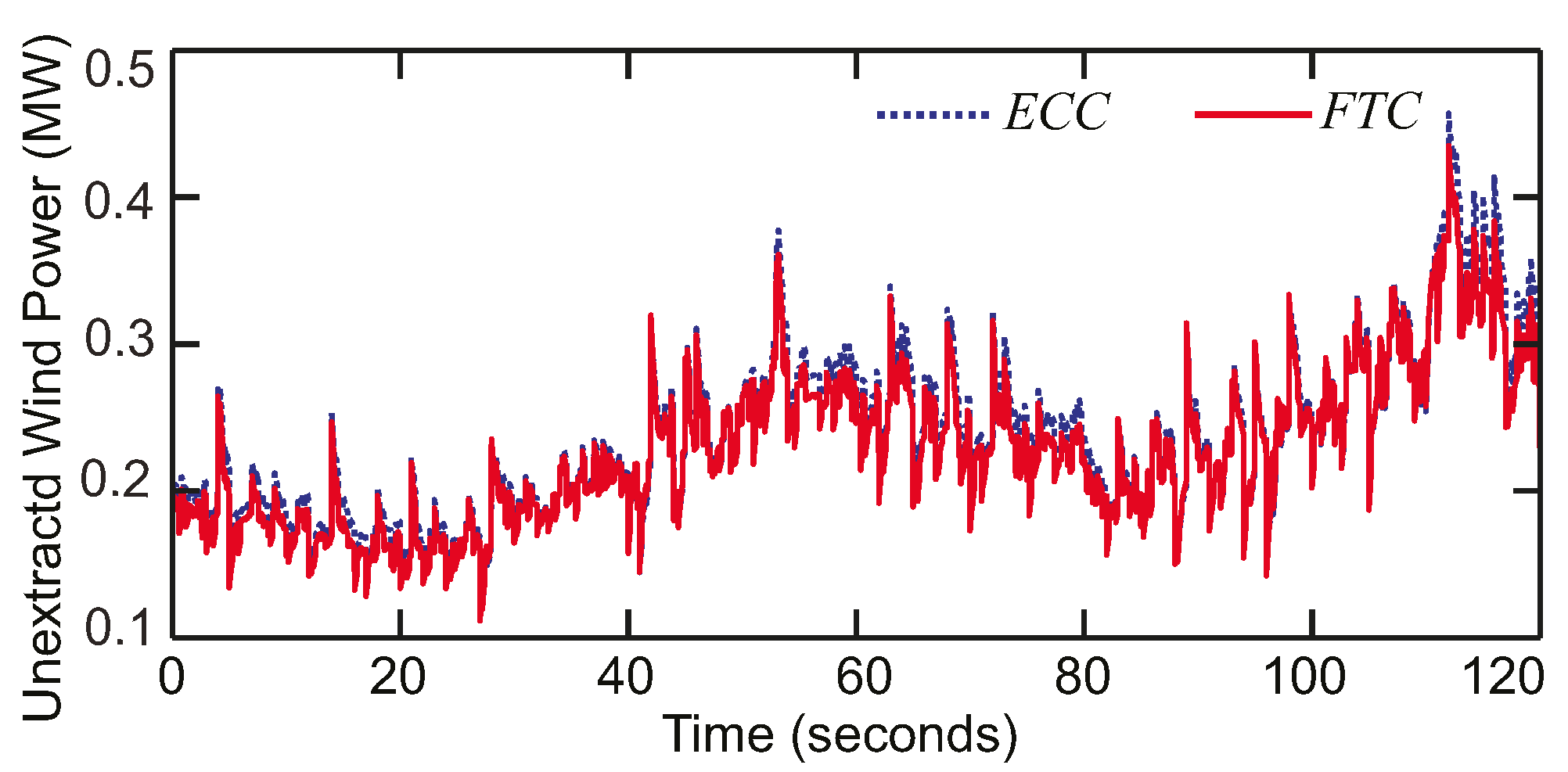
- The proposed FTC leads to fast convergence of the system states and small steady-state errors for normal and perturbed WTG systems with parameter uncertainties. Therefore, the FTC achieves faster maximum power point tracking (MPPT) and extracts more wind power compared to conventional linear and nonlinear controllers.
- An adaptive Kalman-like observer is proposed for the WTG system to estimate the rotor position, rotor speed, and turbine mechanical torque. Thus, the proposed FTC achieves mechanical sensorless control of the WTG and increases the reliability of the WTG system.
- Using the reactive power control loop of the proposed controller, the grid’s voltage stability in a weak grid with a low circuit ratio is investigated.
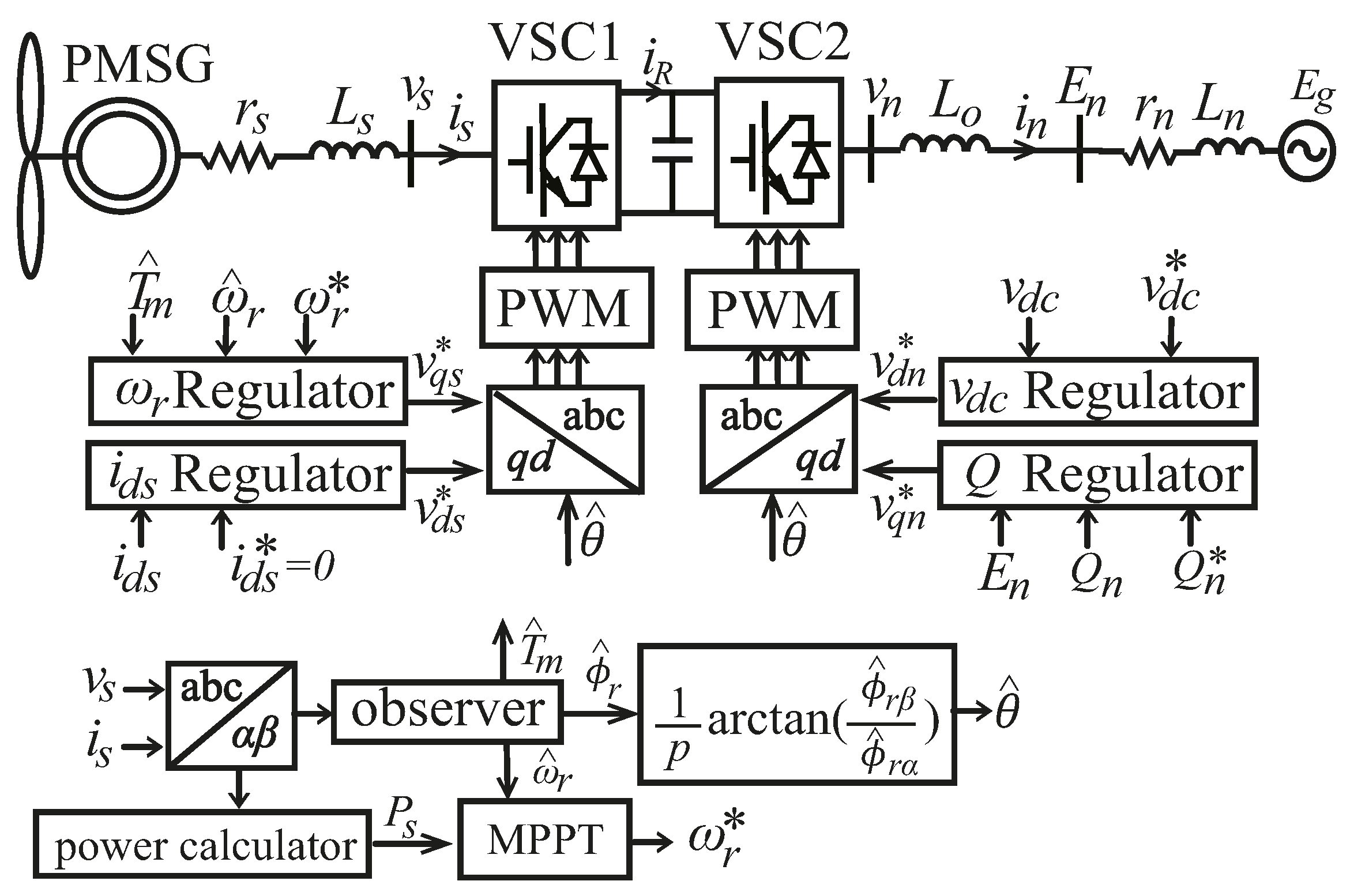
2. PMSG-Based Wind Turbine System Model
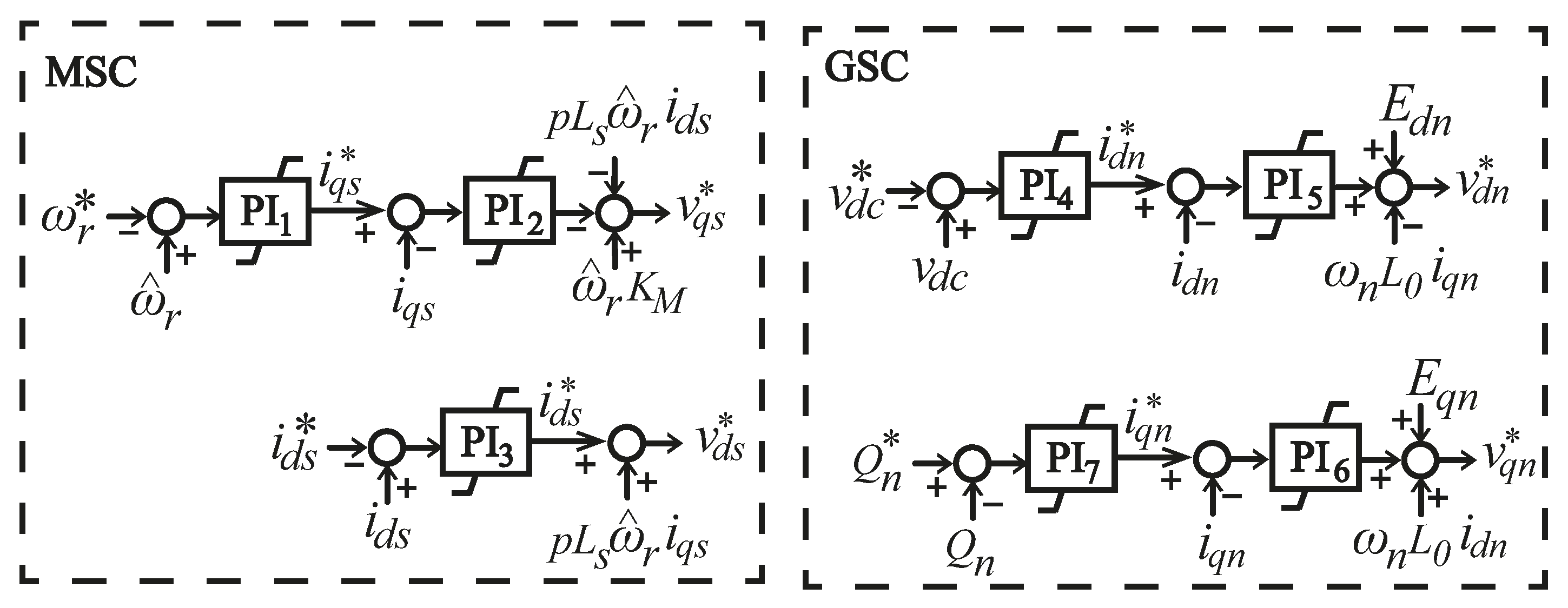
3. Linear Control Scheme for the WTG System
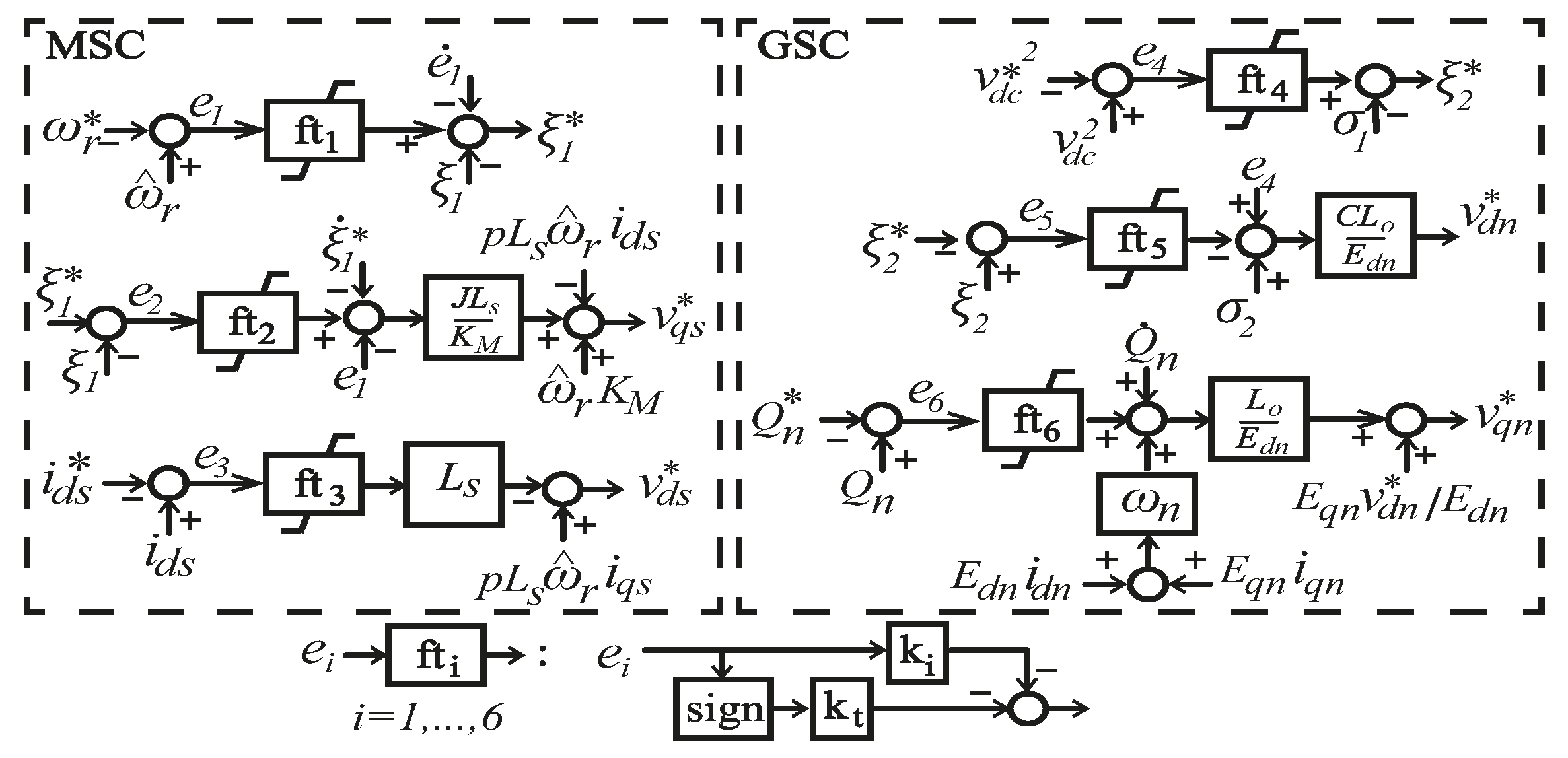
4. Finite-Time Control Design for the PMSG-Based Wind Turbine Generator
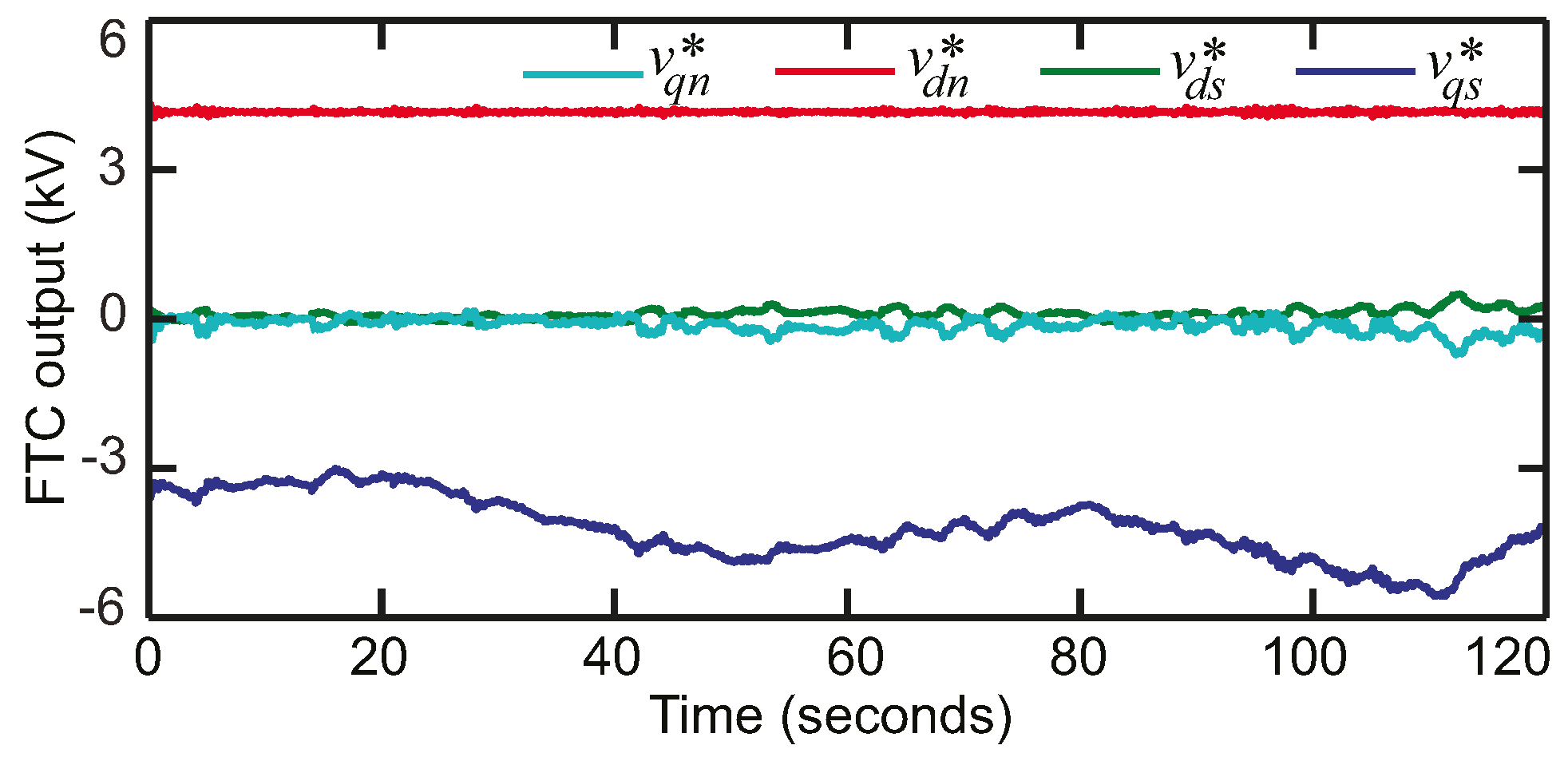
4.1. FTC and Back-Stepping Control Design
4.2. Rotor Speed and Stator Current FTC Design for the MSC
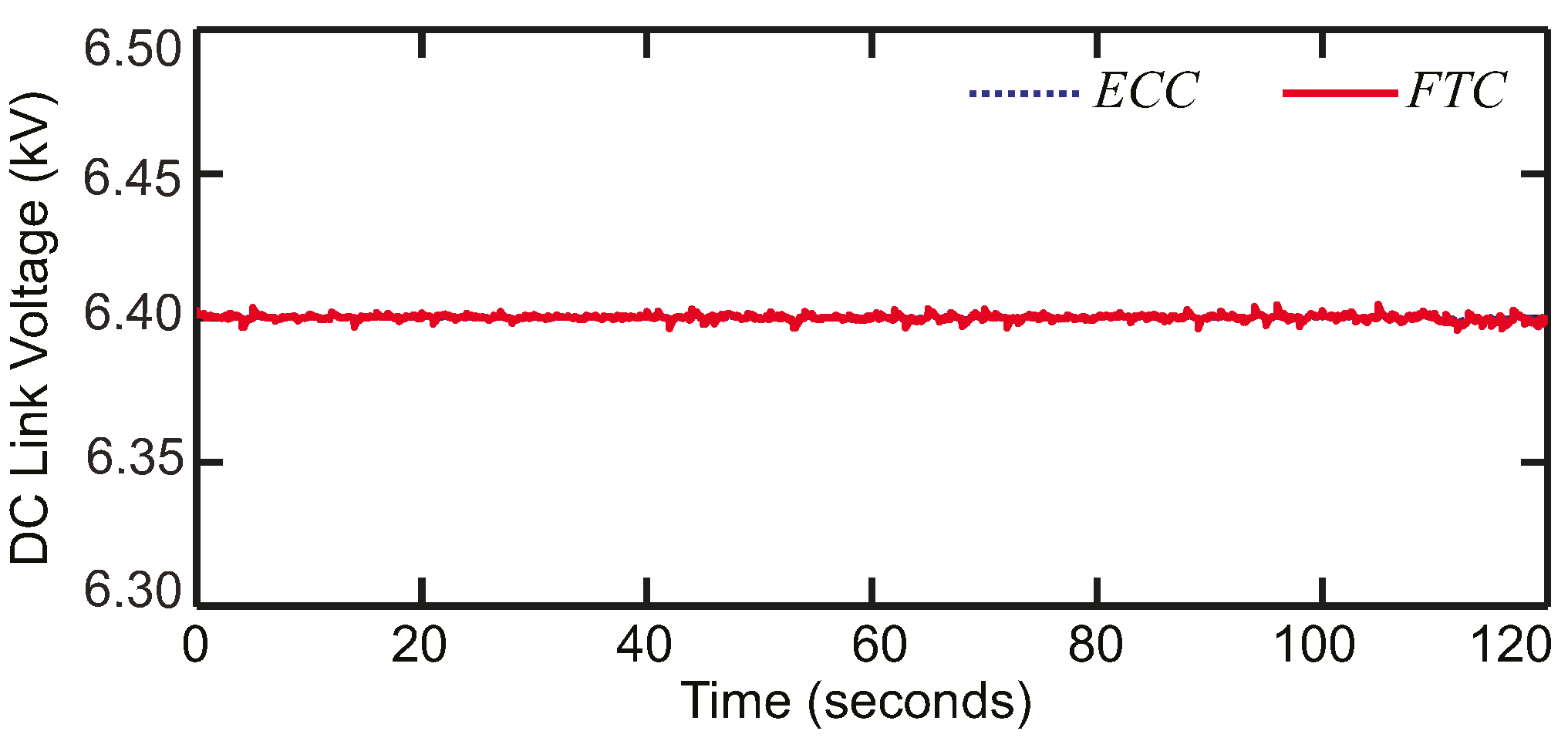
4.3. DC-Link Voltage and Reactive Power FTC for the GSC
4.4. Global Stability Proof of the Proposed FTC for the PMSG
5. Robustness of and Chattering in the Proposed FTC
5.1. Robustness against Parameter Uncertainty
5.2. Continuous FTC with Chattering Elimination
6. State and Parameter Estimations Using an Adaptive Observer
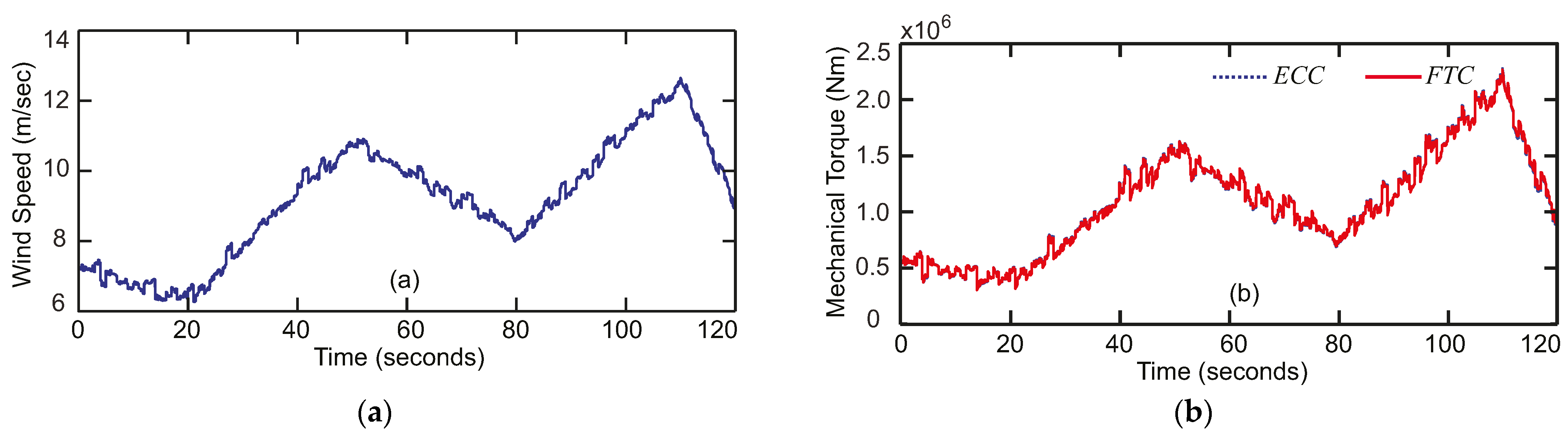
7. Case Study
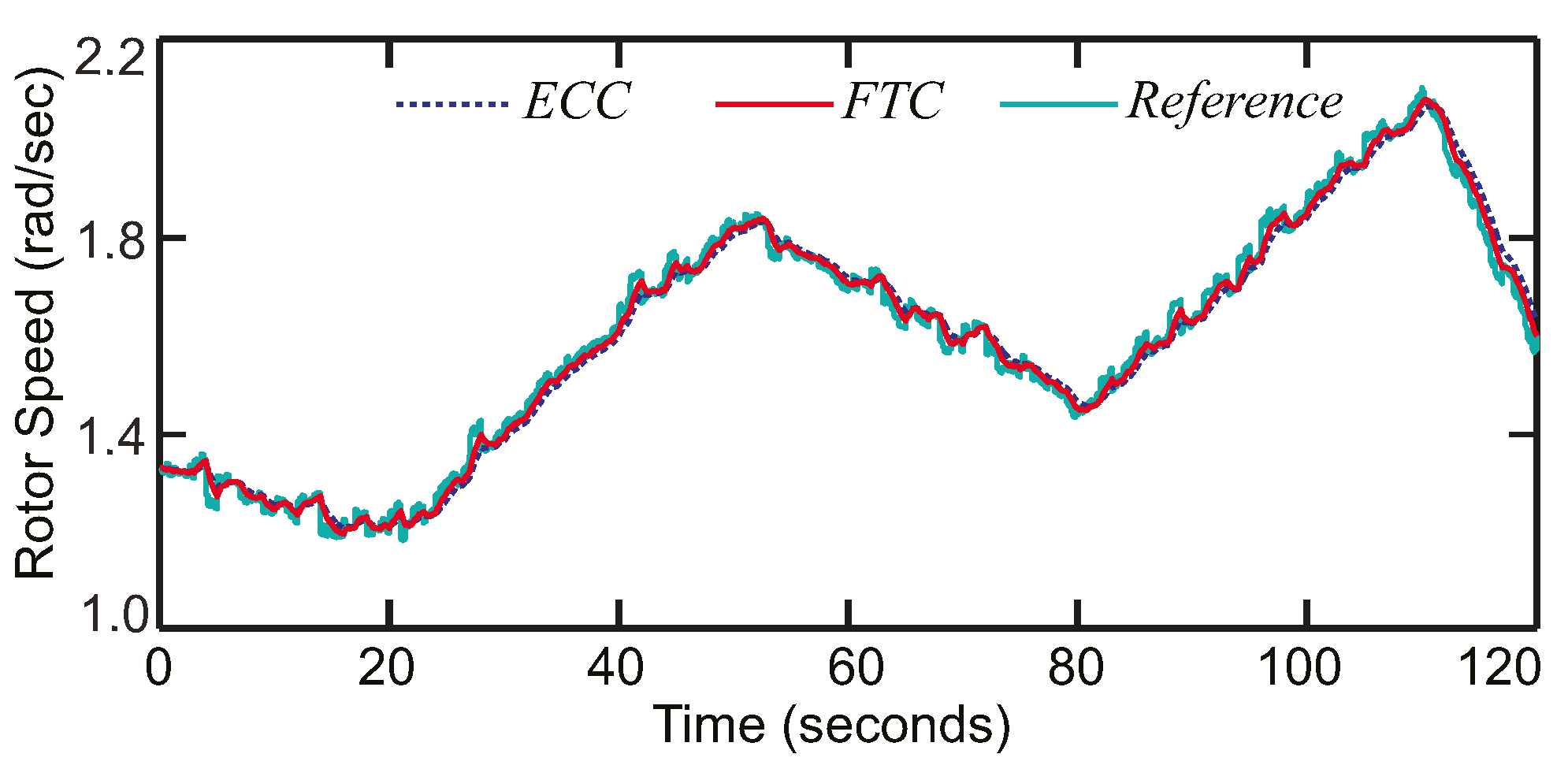
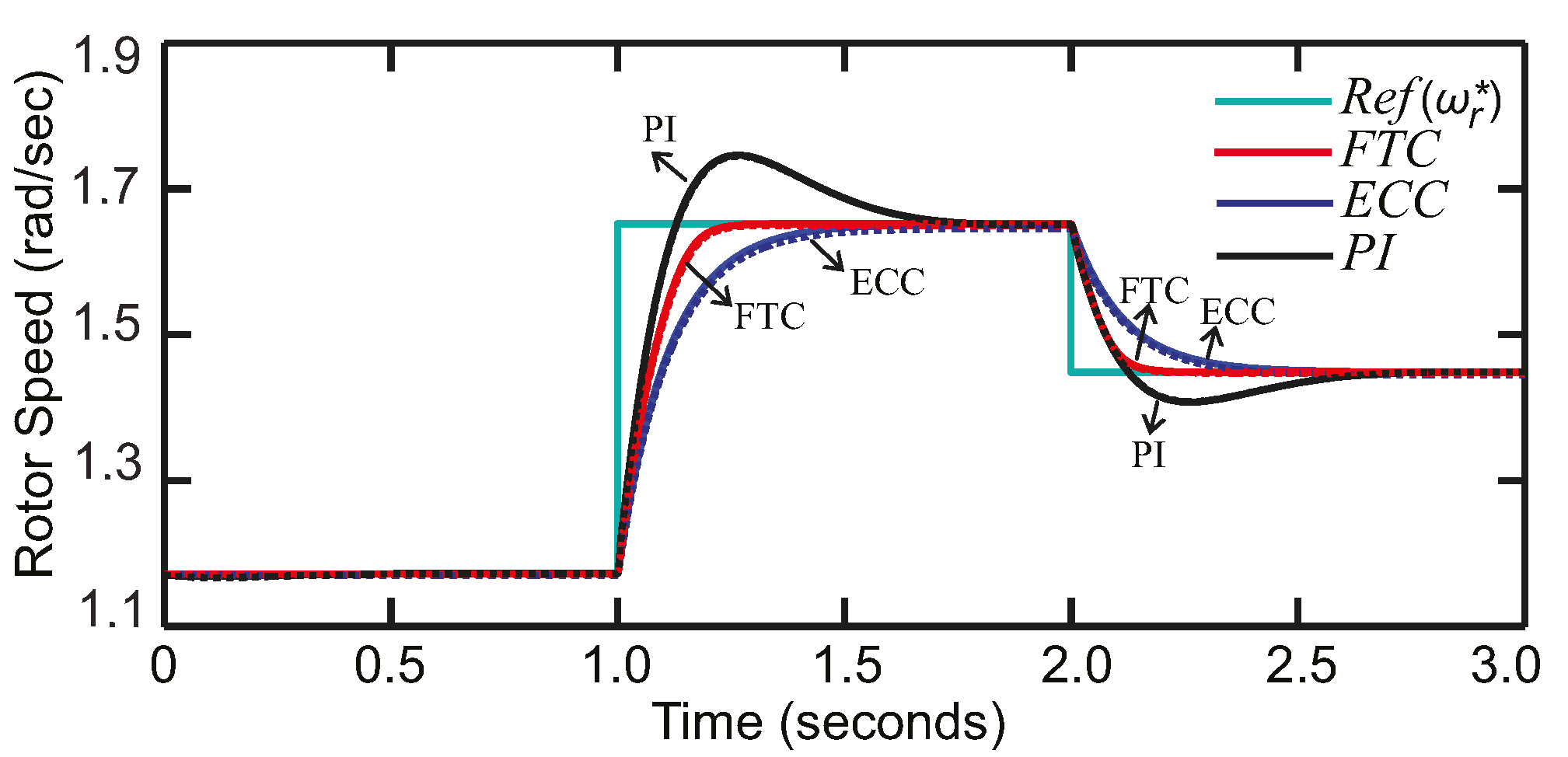
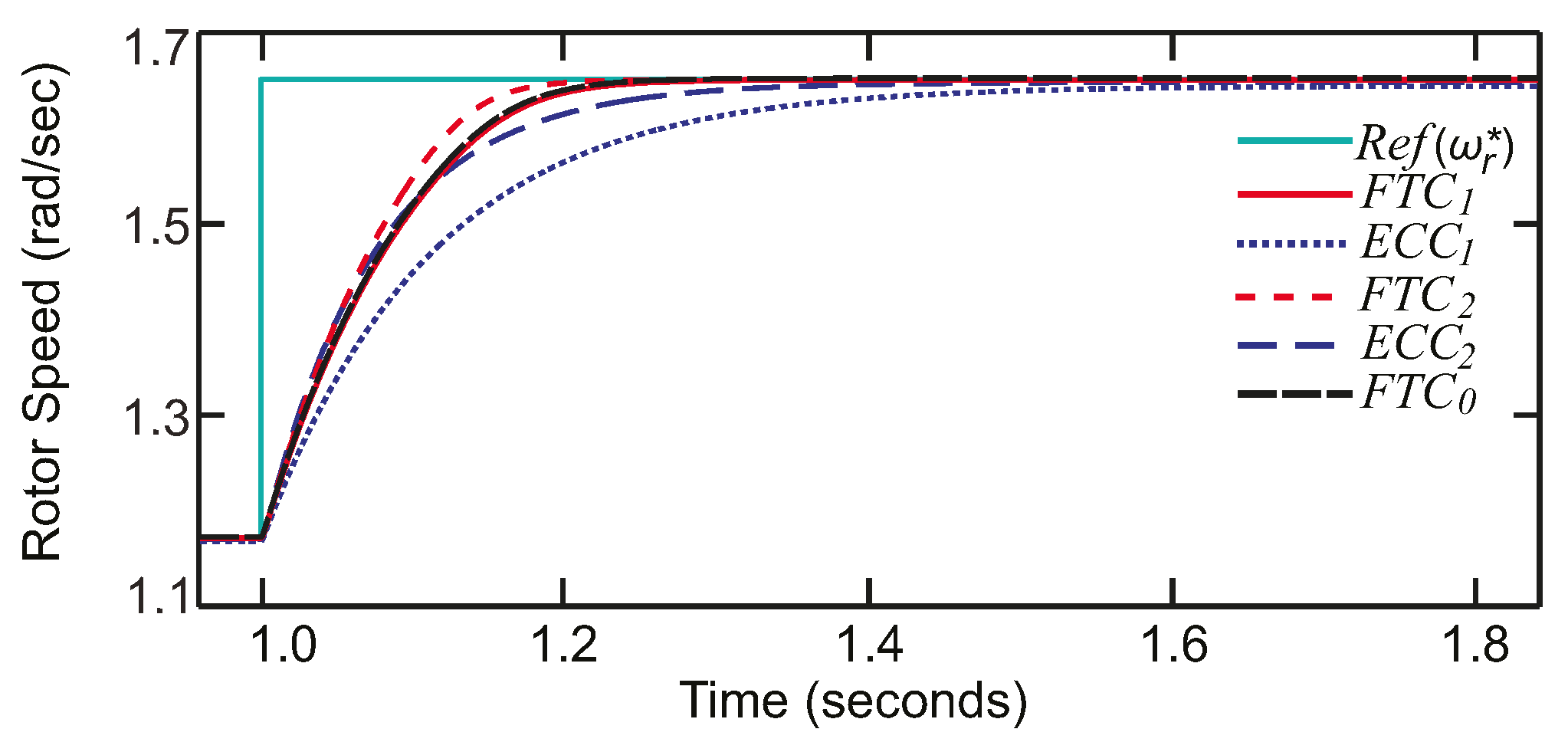
7.1. Rotor Speed Reference Tracking
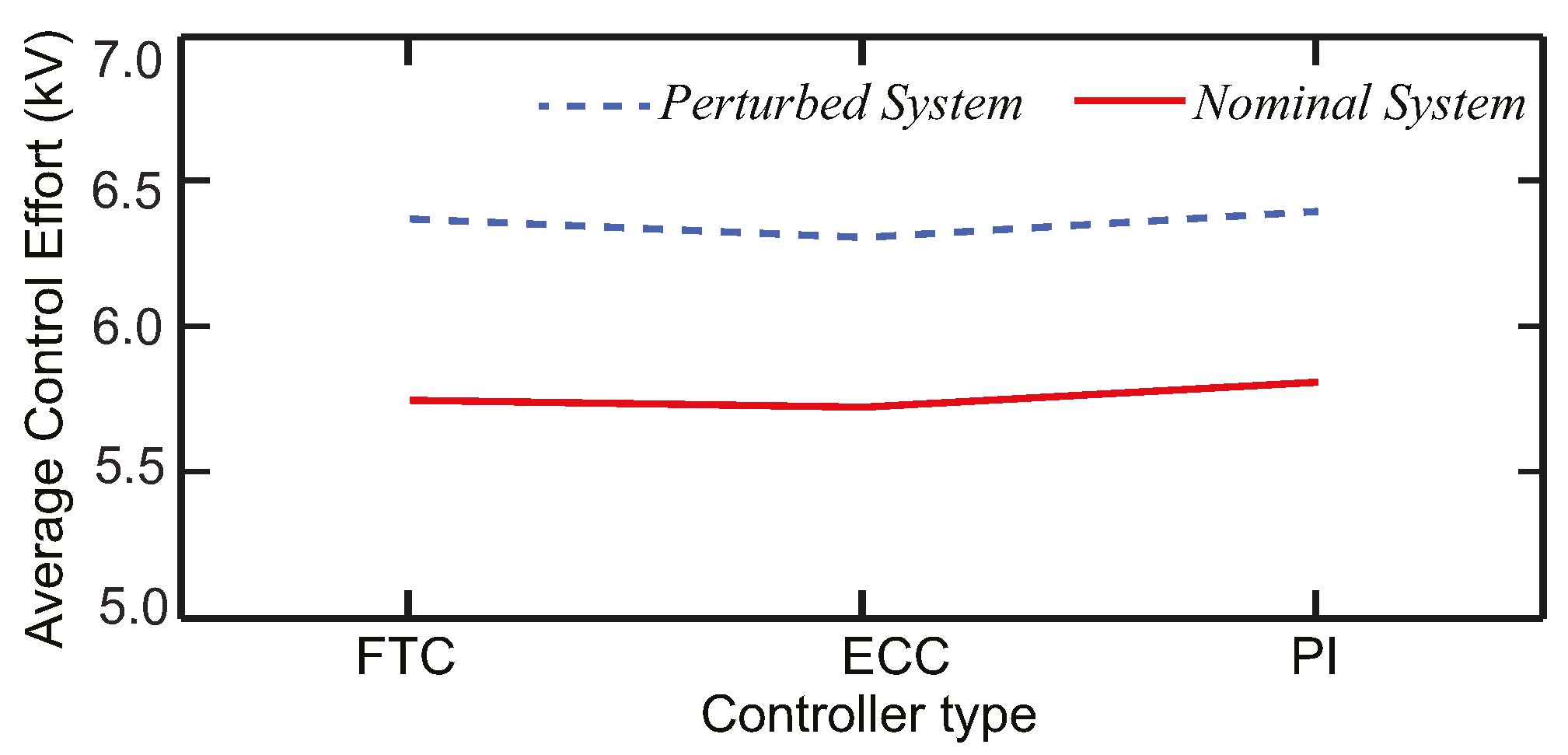
7.2. Robustness of the Proposed Nonlinear Controls against Uncertainties
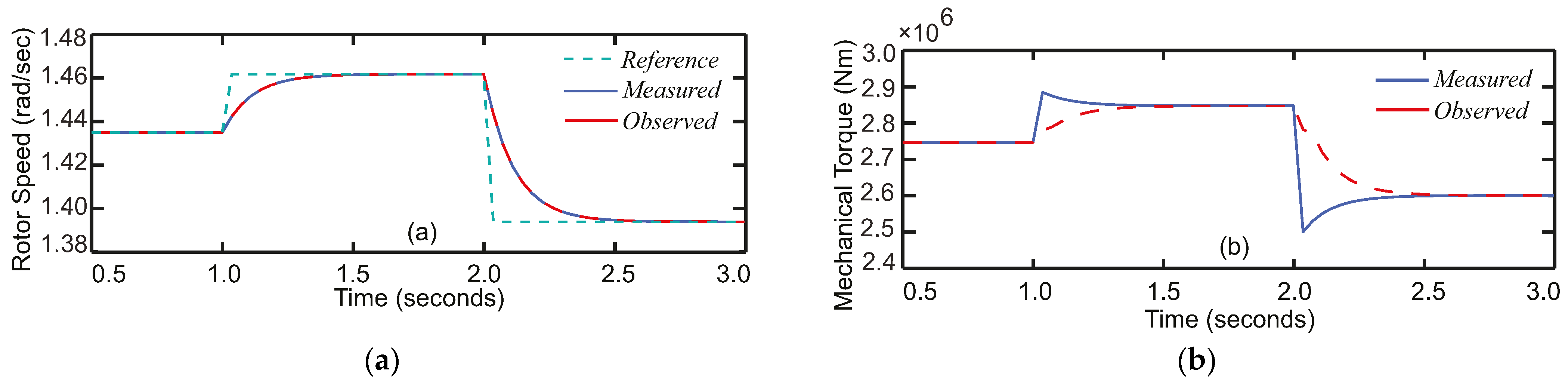
7.3. Implemmention of the Adaptive Observer
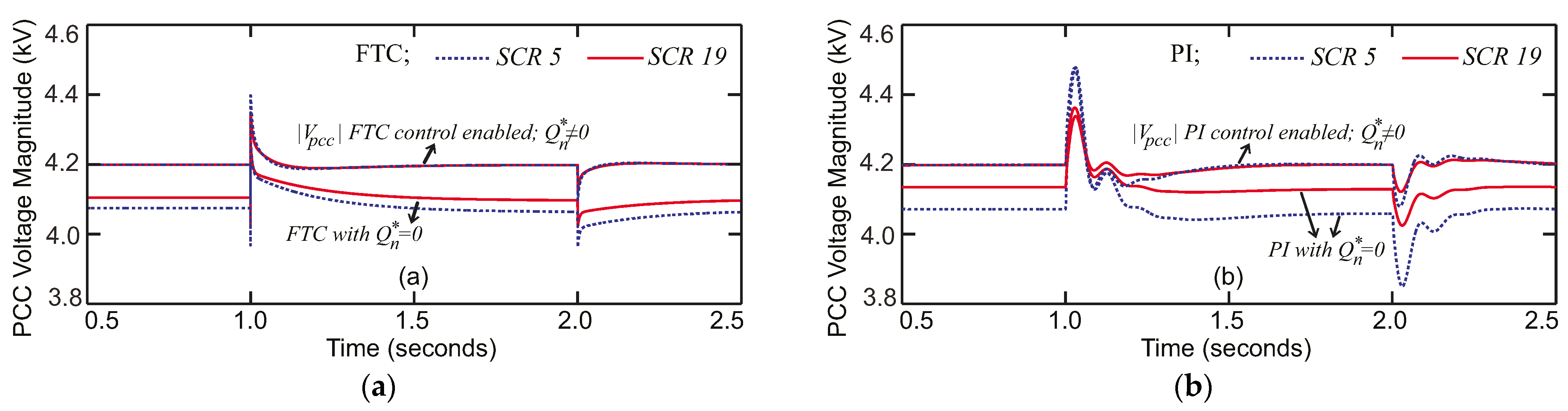
7.4. Performance of the GSC FTC for a Weak Grid
7.5. Discussion
8. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A. Design and Stability Proof of the Proposed FTC
References
- Chinchilla, M.; Arnaltes, S.; Burgos, J.C. Control of permanent-magnet generators applied to variable-speed wind-energy systems connected to the grid. IEEE Trans. Energy Convers. 2006, 21, 130–135. [Google Scholar] [CrossRef] [Green Version]
- Xia, Y.; Ahmed, K.H.; Williams, B.W. Wind turbine power coefficient analysis of a new maximum power point tracking technique. IEEE Trans. Ind. Electron. 2013, 60, 1122–1132. [Google Scholar] [CrossRef]
- Yang, X.; Gong, X.; Qiao, W. Mechanical sensorless maximum power tracking control for direct-drive PMSG wind turbines. In Proceedings of the 2010 IEEE Energy Conversion Congress and Exposition (ECCE), Atlanta, GA, USA, 12–16 September 2010. [Google Scholar]
- Rocha, R. A sensorless control for a variable speed wind turbine operating at partial load. Renew. Energy 2011, 36, 132–141. [Google Scholar] [CrossRef] [Green Version]
- Tan, K.; Islam, S. Optimum control strategies in energy conversion of PMSG wind turbine system without mechanical sensors. IEEE Trans. Energy Convers. 2008, 19, 392–399. [Google Scholar] [CrossRef]
- Blaabjerg, F.; Chen, Z.; Kjaer, S.B. Power electronics as efficient interface in dispersed power generation systems. IEEE Trans. Power Electron. 2004, 19, 1184–1194. [Google Scholar] [CrossRef]
- Rigatos, G.; Siano, P.; Zervos, N. Sensorless control of distributed power generators with the derivative-free nonlinear Kalman filter. IEEE Trans. Ind. Electron. 2014, 61, 6369–6382. [Google Scholar] [CrossRef]
- Pourebrahim, R.; Tohidi, S.; Younesi, A. Sensorless model adaptive control of DFIG by using High frequency signal injection and fuzzy logic control. Iran. J. Electr. Electron. Eng. 2018, 14, 11–21. [Google Scholar]
- Qiao, W.; Zhou, W.; Aller, J.M.; Harley, R.G. Wind Speed Estimation Based Sensorless Output Maximization Control for a Wind Turbine Driving a DFIG. IEEE Trans. Power Electron. 2008, 23, 1156–1169. [Google Scholar] [CrossRef]
- Qiao, W.; Harley, R.G.; Venayagamoorthy, G.K. Coordinated Reactive Power Control of a Large Wind Farm and a STATCOM Using Heuristic Dynamic Programming. IEEE Trans. Energy Convers. 2009, 24, 493–503. [Google Scholar] [CrossRef] [Green Version]
- Fatu, M.; Blaabjerg, F.; Boldea, I. Grid to standalone transition motion-sensorless dual-inverter control of PMSG with asymmetrical grid voltage sags and harmonics filtering. IEEE Trans. Power Electron. 2014, 29, 3463–3472. [Google Scholar] [CrossRef]
- Song, X.; Fang, J.; Han, B.; Zheng, S. Adaptive Compensation Method for High-Speed Surface PMSM Sensorless Drives of EMF-Based Position Estimation Error. IEEE Trans. Power Electron. 2016, 31, 1438–1449. [Google Scholar] [CrossRef]
- Abdelrahem, M.; Hackl, C.M.; Kennel, R. Finite Position Set-Phase Locked Loop for Sensorless Control of Direct-Driven Permanent-Magnet Synchronous Generators. IEEE Trans. Power Electron. 2018, 33, 3097–3105. [Google Scholar] [CrossRef]
- Abdelrahem, M.; Hackl, C.M.; Kenne, R.; Rodríguez, J. Computationally Efficient Finite-Position-Set-Phase-Locked Loop for Sensorless Control of PMSGs in Wind Turbine Applications. IEEE Trans. Power Electron. 2021, 36, 3007–3016. [Google Scholar] [CrossRef]
- Ali, M.A.S.; Mehmood, K.K.; Baloch, S.; Kim, C. Wind-Speed Estimation and Sensorless Control for SPMSG-Based WECS Using LMI-Based SMC. IEEE Access 2020, 8, 26524–26535. [Google Scholar] [CrossRef]
- Liang, D.; Li, J.; Qu, R.; Kong, W. Adaptive Second-Order Sliding-Mode Observer for PMSM Sensorless Control Considering VSI Nonlinearity. IEEE Trans. Power Electron. 2018, 33, 8994–9004. [Google Scholar] [CrossRef]
- Wang, Y.; Xu, Y.; Zou, J. Sliding-Mode Sensorless Control of PMSM with Inverter Nonlinearity Compensation. IEEE Trans. Power Electron. 2019, 34, 10206–10220. [Google Scholar] [CrossRef]
- Pan, Y.; Yang, C.; Pan, L.; Yu, H. Integral Sliding Mode Control: Performance, Modification, and Improvement. IEEE Trans. Ind. Inform. 2018, 14, 3087–3096. [Google Scholar] [CrossRef]
- Zhang, Z.; Zhao, Y.; Qiao, W.; Qu, L. A space-vector-modulated sensorless direct-torque control for direct-drive PMSG wind turbines. IEEE Trans. Ind. Appl. 2014, 50, 2331–2341. [Google Scholar] [CrossRef]
- Yan, J.; Lin, H.; Feng, Y.; Guo, X.; Huang, Y.; Zhu, Z.Q. Improved sliding mode model reference adaptive system speed observer for fuzzy control of direct-drive permanent magnet synchronous generator wind power generation system. IET Renew. Power Gener. 2013, 7, 28–35. [Google Scholar] [CrossRef]
- Beltran, B.; Benbouzid, M.E.H.; Ahmed-Ali, T. Second-Order Sliding Mode Control of a Doubly Fed Induction Generator Driven Wind Turbine. IEEE Trans. Energy Convers. 2012, 27, 261–269. [Google Scholar] [CrossRef] [Green Version]
- Benbouzid, M.E.H.; Beltran, B.; Amirat, Y.; Yao, G.; Han, J. Second-Order Sliding Mode Control for DFIG-Based Wind Turbines Fault Ride-Through Capability Enhancement. ISA Trans. 2014, 53, 827–833. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Besancon, G.; Leon-Morales, J.D.; Huerta-Guevara, O. On adaptive observers for state affine systems. Int. J. Control 2006, 79, 581–591. [Google Scholar] [CrossRef]
- Haque, M.E.; Negnevitsky, M.; Muttaqi, K.M. A novel control strategy for a variable-speed wind turbine with a permanent-magnet synchronous generator. IEEE Trans. Ind. Appl. 2010, 46, 331–339. [Google Scholar] [CrossRef] [Green Version]
- Geng, H.; Xu, D. Stability analysis and improvements for variable-speed multipole permanent magnet synchronous generator-based wind energy conversion system. IEEE Trans. Sustain. Energy 2011, 2, 459–467. [Google Scholar] [CrossRef]
- Geng, H.; Yang, G.; Xu, D.; Wu, B. Unified Power Control for PMSG-Based WECS Operating Under Different Grid Conditions. IEEE Trans. Energy Convers. 2011, 26, 822–830. [Google Scholar] [CrossRef]
- Debnath, S.; Saeedifard, M. A new hybrid modular multilevel converter for grid connection of large wind turbines. IEEE Trans. Sustain. Energy 2013, 4, 1051–1064. [Google Scholar] [CrossRef]
- Li, S.; Haskew, T.A.; Xu, L. Conventional and novel control designs for direct driven PMSG wind turbines. Electr. Power Syst. Res. 2010, 80, 328–338. [Google Scholar] [CrossRef]
- Giraldo, E.; Garces, A. An adaptive control strategy for a wind energy conversion system based on PWM-CSC and PMSG. IEEE Trans. Power Syst. 2014, 29, 1446–1453. [Google Scholar] [CrossRef]
- Muljadi, E.; Butterfield, C.P.; Parsons, B.; Ellis, A. Effect of variable speed wind turbine generator on stability of a weak grid. IEEE Trans. Energy Convers. 2007, 22, 29–36. [Google Scholar] [CrossRef]
- Wang, W.; Beddard, A.; Barnes, M.; Marjanovic, O. Analysis of active power control for VSC–HVDC. IEEE Trans. Power Deliv. 2014, 29, 1978–1988. [Google Scholar] [CrossRef]
- Yuan, X.; Wang, F.; Boroyevich, D.; Li, Y.; Burgos, R. DC-link voltage control of a full power converter for wind generator operating in weak-grid systems. IEEE Trans. Power Electron. 2009, 24, 2178–2192. [Google Scholar] [CrossRef]
- Strachan, N.P.W.; Jovcic, D. Stability of a variable-speed permanent magnet wind generator with weak AC grids. IEEE Transactions on Power Delivery 2010, 25, 2779–2788. [Google Scholar] [CrossRef]
- Xi, X.; Geng, H.; Yang, G. Enhanced model of the doubly fed induction generator-based wind farm for small-signal stability studies of weak power system. IET Renew. Power Gener. 2014, 8, 765–774. [Google Scholar] [CrossRef]
- Mitra, P.; Zhang, L.; Harnefors, L. Offshore wind integration to a weak grid by VSC-HVDC links using power-synchronization control: A case study. IEEE Trans. Power Deliv. 2014, 29, 453–461. [Google Scholar] [CrossRef]
- Neris, A.S.; Vovos, N.A.; Giannakopoulos, G.B. A variable speed wind energy conversion scheme for connection to weak AC systems. IEEE Trans. Energy Convers. 1999, 14, 122–127. [Google Scholar] [CrossRef]
- Lin, W.M.; Hong, C.M.; Lee, M.R.; Huang, C.H.; Huang, C.C.; Wu, B.L. Fuzzy sliding mode-based control for PMSG maximum wind energy capture with compensated pitch angle. In Proceedings of the 2010 International Symposium on Computer, Communication, Control and Automation (3CA), Tainan, Taiwan, 5–7 May 2010; pp. 397–400. [Google Scholar]
- Lin, W.M.; Hong, C.M.; Chen, C.H. Neural-network-based MPPT control of a stand-alone hybrid power generation system. IEEE Trans. Power Electron. 2011, 26, 3571–3581. [Google Scholar] [CrossRef]
- Koutiva, X.I.; Vrionis, T.D.; Vovos, N.A.; Giannakopoulos, G.B. Optimal integration of an offshore wind farm to a weak AC grid. IEEE Trans. Power Deliv. 2006, 21, 987–994. [Google Scholar] [CrossRef]
- Magri, A.E.; Giri, F.; Besancon, G.; Fadili, A.E.; Dugard, L.; Chaoui, F.Z. Sensorless adaptive output feedback control of wind energy systems with PMS generators. Control Eng. Pract. 2013, 21, 530–543. [Google Scholar] [CrossRef] [Green Version]
- Shotorbani, A.M.; Mohammadi, B.; Wang, L.; Marzband, M.; Sabahi, M. Application of finite-time control Lyapunov function in low-power PMSG wind energy conversion systems for sensorless MPPT. Electr. Power Energy Syst. 2019, 106, 169–182. [Google Scholar] [CrossRef]
- Khalil, H.K. Nonlinear Systems, 3rd ed.; Prentice Hall: Upper Saddle River, NJ, USA, 2011. [Google Scholar]
- Sami, I.; Ullah, S.; Ullah, N.; Ro, J.S. Sensorless fractional order composite sliding mode control design for wind generation system. ISA Trans. 2020. [Google Scholar] [CrossRef] [PubMed]
- Gonzales, L.G.; Figueres, E.; Garcera, G.; Carranza, O. Maximum-power-point tracking with reduced mechanical stress applied to wind-energy-conversion-systems. Appl. Energy 2010, 87, 2304–2312. [Google Scholar] [CrossRef] [Green Version]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Quantity | Value |
|---|---|---|
| Rotor inertia | 1.06 × 107 Nm/rad/s2 | |
| Viscous coefficient | 1.417 Nm/rad/s | |
| Number of pole pairs | 145 | |
| Flux generator constant | 2.6354 × 103 | |
| PMSG stator resistance | 3 mΩ | |
| PMSG stator inductance | 1 mH | |
| Grid voltage | 4.16 kV | |
| Output inductance | 1 mH | |
| Grid voltage frequency | 2π × 50 rad/s |
| Quantity | Value |
|---|---|
| Turbine-rated torque | 3.226 × 106 Nm |
| Rated wind speed | 11.8 m/s |
| PMSG-rated speed | 1.55 rad/s |
| PMSG-rated power | 5 MVA |
| Quantity | Value |
|---|---|
| 2.7, 9.3 × 103 330, 4, 3.1 × 103, 2.1 × 103 | |
| 1 | |
| Sign approximation gain | 20 |
| 5 × 104, 1.5, 1.5, 5, 1.1, 1.36, 0.01 | |
| 2.5 × 105, 1.2 × 103, 1 × 103, 6 × 102, 8 × 102, 1.2 × 103, 3 | |
| Observer adaptive gains , , , | 1.5 × 104, 2.3 × 104, 1.5 × 104, 1 × 10−6 |
| Controller | FTC | ECC | PI Controller |
|---|---|---|---|
| Maximum available | 2.091 | ||
| Measurement based | 1.854 | 1.835 | 1.817 |
| Observer based | 1.846 | 1.824 | 1.806 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pourebrahim, R.; Shotorbani, A.M.; Márquez, F.P.G.; Tohidi, S.; Mohammadi-Ivatloo, B. Robust Control of a PMSG-Based Wind Turbine Generator Using Lyapunov Function. Energies 2021, 14, 1712. https://doi.org/10.3390/en14061712
Pourebrahim R, Shotorbani AM, Márquez FPG, Tohidi S, Mohammadi-Ivatloo B. Robust Control of a PMSG-Based Wind Turbine Generator Using Lyapunov Function. Energies. 2021; 14(6):1712. https://doi.org/10.3390/en14061712
Chicago/Turabian StylePourebrahim, Roghayyeh, Amin Mohammadpour Shotorbani, Fausto Pedro García Márquez, Sajjad Tohidi, and Behnam Mohammadi-Ivatloo. 2021. "Robust Control of a PMSG-Based Wind Turbine Generator Using Lyapunov Function" Energies 14, no. 6: 1712. https://doi.org/10.3390/en14061712
APA StylePourebrahim, R., Shotorbani, A. M., Márquez, F. P. G., Tohidi, S., & Mohammadi-Ivatloo, B. (2021). Robust Control of a PMSG-Based Wind Turbine Generator Using Lyapunov Function. Energies, 14(6), 1712. https://doi.org/10.3390/en14061712