
Experts versus Algorithms? Optimized Fuzzy Logic Energy Management of Autonomous PV Hybrid Systems with Battery and H2 Storage


Abstract
:1. Introduction
2. System Topology and the Energy Management Problem
2.1. System Topology
2.2. Energy Management: Problem Structure and Objectives
- 1.
- Direct from PV to load:
- 2.
- Using battery storage:
- 3.
- Using H2 storage:
- 4.
- Using battery storage before or after using H2 storage:
- 5.
- Using battery storage before and after using H2 storage:
- 6.
- Curtailing PV power:
3. Fuzzy Logic Energy Management
3.1. Fuzzy Logic Control
3.2. Controller Structure
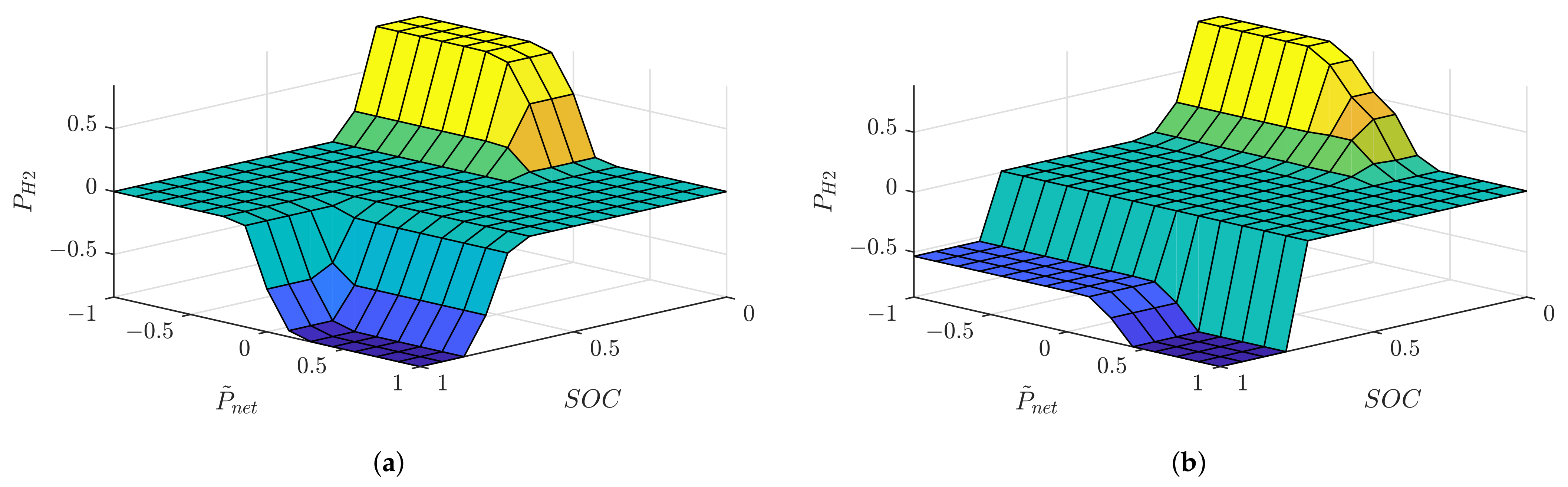
3.3. Definition of Membership Functions
3.4. Definition of Rule Base
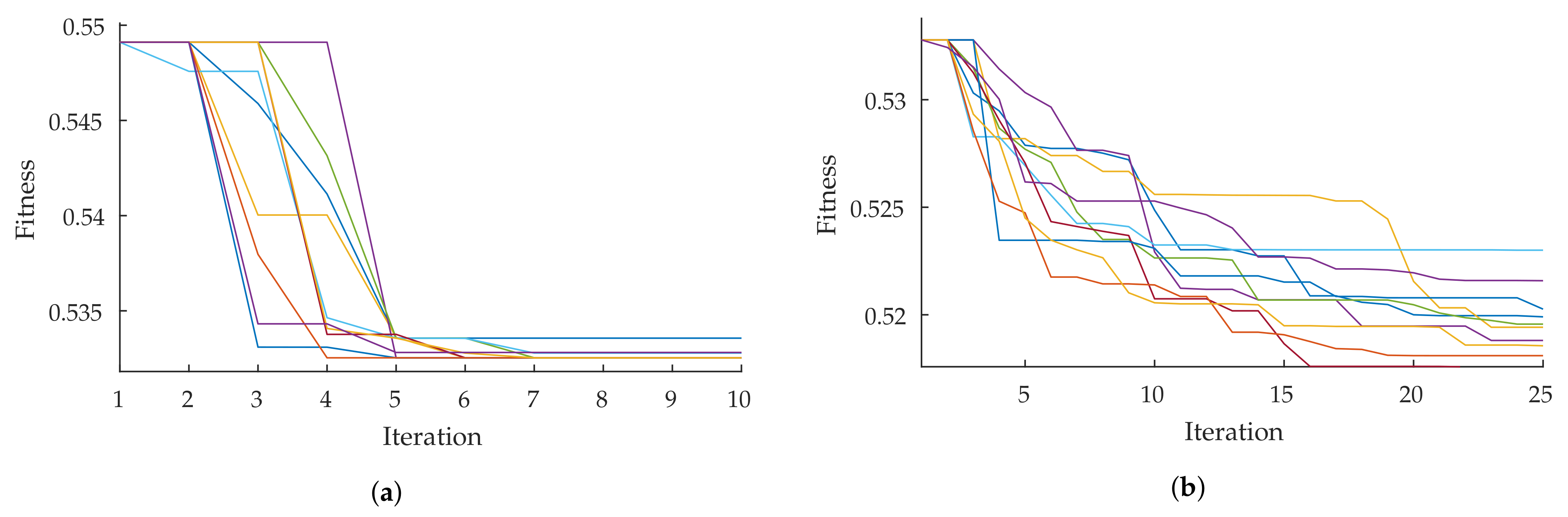
3.5. Particle Swarm Optimization
3.5.1. Fitness Function
- The system efficiency can be expressed by the overall annual energy losses —the sum of battery, fuel cell, electrolyzer and PV curtailment losses—which are to be minimized to maximize system efficiency.
- The component stress on the H2-components can be divided into cyclical stresses, which are operationalized by the number of startups of the electrolyzer and the fuel cell respectively, and degradation that follows normal operation, which is represented by the operation time of the electrolyzer and the fuel cell . , , , are to be minimized.
3.5.2. Adjustments
- Reducing the search space to increase the likelihood of convergence and to decrease the necessary number of iterations.
- Maintaining interpretability.
Rule Base Optimization
Membership Function Optimization
| Adjustment 1: | To ensure that each point in the control space is reachable, the entire range of a fuzzy variable is to be covered by at least one membership function. To achieve this, the outermost points of the outermost membership functions are fixed to the corresponding extreme values. This reduces the number of dimensions by 6 to 32. | |
| Adjustment 2: | The fuzzy sets Z and Z keep their maximum at the crisp value 0. Whereas the meaning of the terms low and high are open to interpretation, the meaning of Z is not. Hence, the dimensions can be reduced to 30. | |
| Adjustment 3: | The dimensions describing the membership functions and N for the variables and should always be below 0, while the dimensions describing the membership functions P and should always be above 0. Hence, the search range can be reduced. | |
| Adjustment 4: | In order to get a smooth control surface the membership functions should overlap such that the maximum of a given membership function corresponds to the right and the left minimum of the neighbouring membership functions respectively. Hence, the sum of the degrees of membership for each fuzzy set activated by a crisp value is 1. This is intuitive and reduces the dimensions to 10. | |
| Adjustment 5: | The order of membership functions is to be maintained, as interpretability would be lost otherwise. For example, if an optimization run results in the maximum of the fuzzy set NB to be higher than the maximum of the fuzzy set N, the labels NB and N lose their meaning. Hence, the dimensions are reordered after each update. |
4. Simulation Framework
4.1. Load Database
4.2. Component Models
5. Simulation-Based Analysis
- 1.
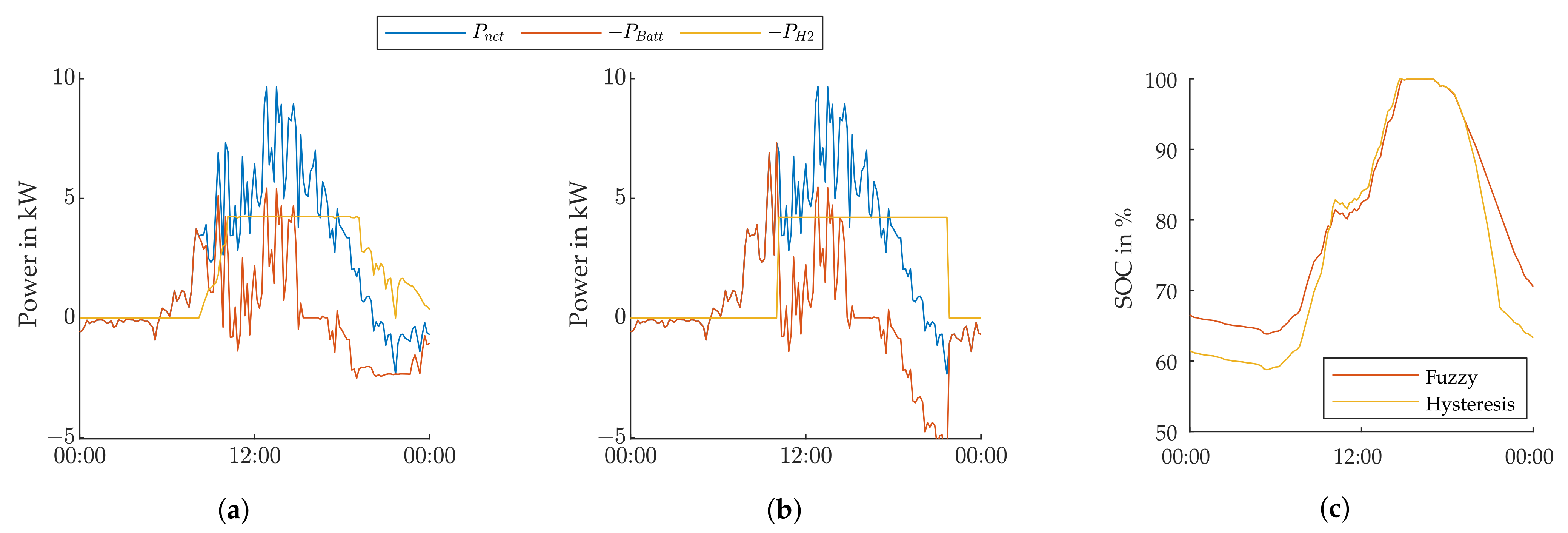
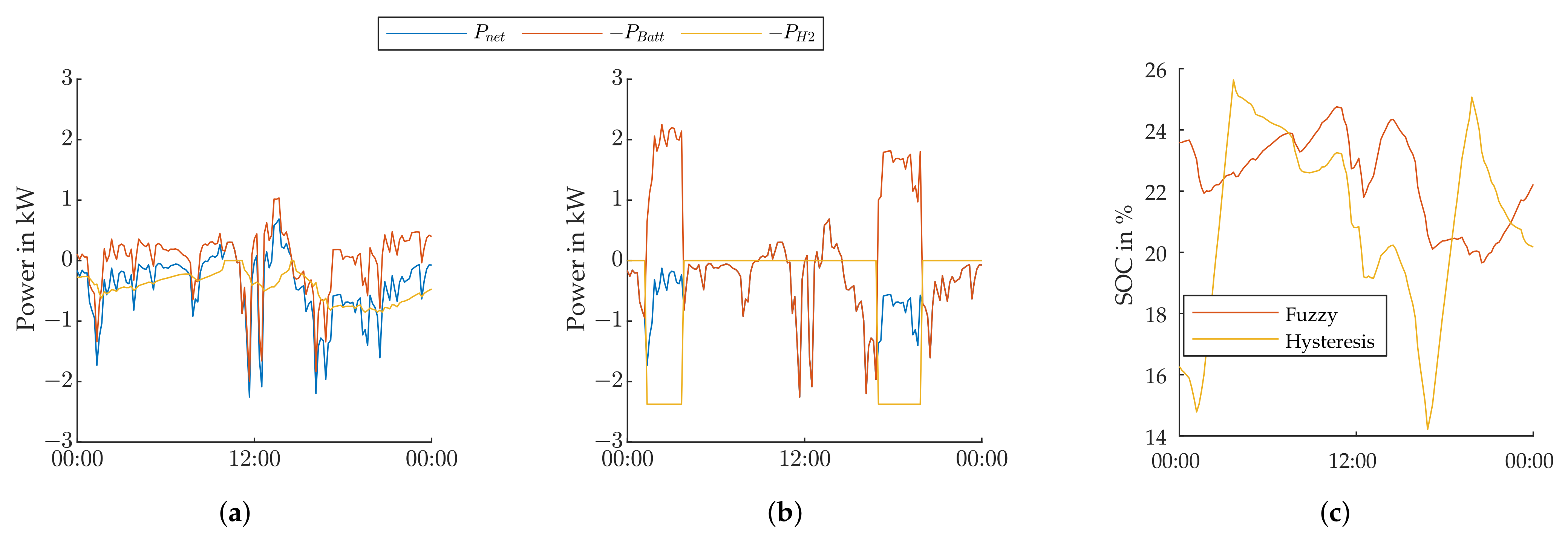
- The expert tuned controller was simulated for a time frame of 1 year for the load data set No 17. According to [51], this profile is close to the daily standard load profile and thus, is considered a good starting point. The simulations were compared to a three-point hysteresis controller as a point of reference.
- 2.
- The particle swarm optimization was performed for the same load profile and compared to the expert tuned controller. The optimization followed the two-step approach described in Section 3.5.2.
- 3.
- To test the generalizability of results, the three tunings—expert, particle swarm optimized rules, particle swarm optimized rules and membership functions—were simulated for the 65 households selected in Section 4.1. The hypothesis was that the optimized controllers performed better in terms of the indicators used in the fitness function but were less robust in terms of short-term security of supply.
- 4.
- In the next step, the interpretability of results obtained from optimization was exploited. Expert knowledge was used to readjust the tuning of the optimized controllers aiming at retaining as much of the optimization benefits, while significantly increasing robustness.
- 5.
- Finally, for one household, for which none of the above-mentioned controllers performed satisfactorily, further adjustments and their implications are discussed.
5.1. Expert Tuned Controller
5.2. Fuzzy Logic Energy Management System Optimization
5.3. Fuzzy Logic Energy Management System Validation
5.4. Handles to Increase Robustness
- 1.
- Increasing the thresholds that marked the transition from a low battery SOC to a good battery SOC from 0.15 and 0.25 to 0.33 and 0.34, respectively.
- 2.
- Increasing the threshold marking the transition between is Z and is N from −0.16 to −0.08.
6. Conclusions and Outlook
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| Annual energy consumption in kWh | |
| Aggregated annual energy losses in kWh | |
| Annual PV generation in kWh | |
| Relative surplus energy at the end of the year in % (compare Equation (14)) | |
| F | Fitness of particle in particle swarm optimization |
| Objective function i | |
| Best global past position among all particles | |
| H2 | Hydrogen |
| Centre of area | |
| H2 stored in tank in kg | |
| N | Negative |
| NB | Negative big |
| Equivalent number of full battery cycles | |
| Time battery SOC is below 5% in min | |
| Number of electrolyzer starts | |
| Number of fuel cell starts | |
| P | Positive |
| OptMF | Controller tuning optimized membership functions based on OptRuleE |
| OptMFE | Controller tuning optimized membership functions, expert adjusted |
| OptMFER | Controller tuning based on OptMFE, adjusted for robustness |
| OptRule | Controller tuning with optimized rule base |
| OptRuleE | Controller tuning with optimized rule base, expert adjusted |
| Battery output power | |
| Electrolyzer output power | |
| Fuel cell output power | |
| Power of the H2 storage path (if positive equal to , if negative equal to ) | |
| , normalized | |
| Load power | |
| Power difference between and | |
| , normalized | |
| PV power generation | |
| Curtailed PV power | |
| PB | Positive big |
| Best past position of particle n | |
| PV | Photovoltaic |
| q | Penalty parameter |
| R | Rule in the fuzzy rule base |
| SOC | State of charge |
| Time electrolyzer is in operation in h | |
| Time fuel cell is in operation in h | |
| Velocity of particle n | |
| Position of particle n | |
| Z | Zero |
| Higher heating value | |
| Battery round-trip efficiency | |
| DC–DC converter efficiency | |
| Electrolyzer average efficiency | |
| Fuel cell average efficiency | |
| Inverter efficiency | |
| PV average efficiency | |
| Membership function of fuzzy set A |
References
- Bocklisch, T. Hybrid Energy Storage Approach for Renewable Energy Applications. J. Energy Storage 2016, 8, 311–319. [Google Scholar] [CrossRef]
- Kyriakarakos, G.; Dounis, A.I.; Arvanitis, K.G.; Papadakis, G. A Fuzzy Logic Energy Management System for Polygeneration Microgrids. Renew. Energy 2012, 41, 315–327. [Google Scholar] [CrossRef]
- Erdinc, O.; Vural, B.; Uzunoglu, M. A Wavelet-Fuzzy Logic Based Energy Management Strategy for a Fuel Cell/Battery/Ultra-Capacitor Hybrid Vehicular Power System. J. Power Sources 2009, 194, 369–380. [Google Scholar] [CrossRef]
- Ferreira, A.A.; Pomilio, J.A.; Spiazzi, G.; Araujo Silva, L. Energy Management Fuzzy Logic Supervisory for Electric Vehicle Power Supplies System. IEEE Trans. Power Electron. 2008, 23, 107–115. [Google Scholar] [CrossRef]
- Li, C.Y.; Liu, G.P. Optimal Fuzzy Power Control and Management of Fuel Cell/Battery Hybrid Vehicles. J. Power Sources 2009, 192, 525–533. [Google Scholar] [CrossRef]
- Vivas, F.J.; De las Heras, A.; Segura, F.; Andújar, J.M. A Review of Energy Management Strategies for Renewable Hybrid Energy Systems with Hydrogen Backup. Renew. Sustain. Energy Rev. 2018, 82, 126–155. [Google Scholar] [CrossRef]
- Stegner, C.; Glaß, O.; Beikircher, T. Comparing Smart Metered, Residential Power Demand with Standard Load Profiles. Sustain. Energy Grids Netw. 2019, 20, 100248. [Google Scholar] [CrossRef]
- Bocklisch, T. Intelligente Dezentrale Energiespeichersysteme. UWF UmweltWirtschaftsForum 2014, 22, 63–70. [Google Scholar] [CrossRef]
- Kyriakarakos, G.; Dounis, A.I.; Arvanitis, K.G.; Papadakis, G. A Fuzzy Cognitive Maps–Petri Nets Energy Management System for Autonomous Polygeneration Microgrids: Theoretical Issues and Advanced Applications on Fuzzy Cognitive Maps. Appl. Soft Comput. 2012, 12, 3785–3797. [Google Scholar] [CrossRef]
- Bilodeau, A.; Agbossou, K. Control Analysis of Renewable Energy System with Hydrogen Storage for Residential Applications. J. Power Sources 2006, 162, 757–764. [Google Scholar] [CrossRef]
- Calderón, A.J.; González, I.; Calderón, M. Management of a PEM Electrolyzer in Hybrid Renewable Energy Systems. In Fuzzy Modeling and Control: Theory and Applications; Matía, F., Marichal, G.N., Jiménez, E., Eds.; Atlantis Computational Intelligence Systems; Atlantis Press: Paris, France, 2014; Volume 9, pp. 217–233. [Google Scholar]
- Safari, S.; Ardehali, M.M.; Sirizi, M.J. Particle Swarm Optimization Based Fuzzy Logic Controller for Autonomous Green Power Energy System with Hydrogen Storage. Energy Convers. Manag. 2013, 65, 41–49. [Google Scholar] [CrossRef]
- García, P.; Torreglosa, J.P.; Fernández, L.M.; Jurado, F. Optimal Energy Management System for Stand-Alone Wind Turbine/Photovoltaic/Hydrogen/Battery Hybrid System with Supervisory Control Based on Fuzzy Logic. Int. J. Hydrogen Energy 2013, 38, 14146–14158. [Google Scholar] [CrossRef]
- Erdinc, O.; Uzunoglu, M. The Importance of Detailed Data Utilization on the Performance Evaluation of a Grid-Independent Hybrid Renewable Energy System. Int. J. Hydrogen Energy 2011, 36, 12664–12677. [Google Scholar] [CrossRef]
- Sarvi, M.; Avanaki, I.N. An Optimized Fuzzy Logic Controller by Water Cycle Algorithm for Power Management of Stand-Alone Hybrid Green Power Generation. Energy Convers. Manag. 2015, 106, 118–126. [Google Scholar] [CrossRef]
- Boukettaya, G.; Krichen, L.; Ouali, A. Fuzzy Logic Supervisor for Power Control of an Isolated Hybrid Energy Production Unit. Int. J. Electr. Power Eng. 2007, 1, 279–285. [Google Scholar]
- Habib, M.; Ladjici, A.A.; Harrag, A. Microgrid Management Using Hybrid Inverter Fuzzy-Based Control. Neural Comput. Appl. 2019, 32, 1–19. [Google Scholar] [CrossRef]
- Ganguly, P.; Kalam, A.; Zayegh, A. Fuzzy Logic-Based Energy Management System of Stand-Alone Renewable Energy System for a Remote Area Power System. Aust. J. Electr. Electron. Eng. 2019, 16, 21–32. [Google Scholar] [CrossRef]
- Berrazouane, S.; Mohammedi, K. Parameter Optimization via Cuckoo Optimization Algorithm of Fuzzy Controller for Energy Management of a Hybrid Power System. Energy Convers. Manag. 2014, 78, 652–660. [Google Scholar] [CrossRef]
- Thameem Ansari, M.; Velusami, S. Dual Mode Linguistic Hedge Fuzzy Logic Controller for an Isolated Wind–Diesel Hybrid Power System with Superconducting Magnetic Energy Storage Unit. Energy Convers. Manag. 2010, 51, 169–181. [Google Scholar] [CrossRef]
- Al-Sakkaf, S.; Kassas, M.; Khalid, M.; Abido, M.A. An Energy Management System for Residential Autonomous DC Microgrid Using Optimized Fuzzy Logic Controller Considering Economic Dispatch. Energies 2019, 12, 1457. [Google Scholar] [CrossRef] [Green Version]
- Weyers, C.; Bocklisch, T. Simulation-Based Investigation of Energy Management Concepts for Fuel Cell – Battery – Hybrid Energy Storage Systems in Mobile Applications. Energy Procedia 2018, 155, 295–308. [Google Scholar] [CrossRef]
- Arcos-Aviles, D.; García-Gutièrrez, G.; Guinjoan, F.; Carrera, E.V.; Pascual, J.; Ayala, P.; Marroyo, L.; Motoasca, E. Adjustment of the Fuzzy Logic Controller Parameters of the Energy Management Strategy of a Grid-Tied Domestic Electro-Thermal Microgrid Using the Cuckoo Search Algorithm. In Proceedings of the IECON 2019—45th Annual Conference of the IEEE Industrial Electronics Society, Lisbon, Portugal, 14–17 October 2019; Volume 1, pp. 279–285. [Google Scholar] [CrossRef]
- Arcos-Aviles, D.; Pacheco, D.; Pereira, D.; Garcia-Gutierrez, G.; Carrera, E.V.; Ibarra, A.; Ayala, P.; Martínez, W.; Guinjoan, F. A Comparison of Fuzzy-Based Energy Management Systems Adjusted by Nature-Inspired Algorithms. Appl. Sci. 2021, 11, 1663. [Google Scholar] [CrossRef]
- Athari, M.H.; Ardehali, M.M. Operational Performance of Energy Storage as Function of Electricity Prices for On-Grid Hybrid Renewable Energy System by Optimized Fuzzy Logic Controller. Renew. Energy 2016, 85, 890–902. [Google Scholar] [CrossRef]
- Vivas, F.J.; Segura, F.; Andújar, J.M.; Palacio, A.; Saenz, J.L.; Isorna, F.; López, E. Multi-Objective Fuzzy Logic-Based Energy Management System for Microgrids with Battery and Hydrogen Energy Storage System. Electronics 2020, 9, 1074. [Google Scholar] [CrossRef]
- Faisal, M.; Hannan, M.A.; Ker, P.J.; Rahman, M.S.A.; Begum, R.A.; Mahlia, T.M.I. Particle Swarm Optimised Fuzzy Controller for Charging–Discharging and Scheduling of Battery Energy Storage System in MG Applications. Energy Rep. 2020, 6, 215–228. [Google Scholar] [CrossRef]
- Babu, T.S.; Vasudevan, K.R.; Ramachandaramurthy, V.K.; Sani, S.B.; Chemud, S.; Lajim, R.M. A Comprehensive Review of Hybrid Energy Storage Systems: Converter Topologies, Control Strategies and Future Prospects. IEEE Access 2020, 8, 148702–148721. [Google Scholar] [CrossRef]
- Welch, R.; Venayagamoorthy, G.K. A Fuzzy-PSO Based Controller for a Grid Independent Photovoltaic System. In Proceedings of the IEEE Swarm Intelligence Symposium, Honolulu, HI, USA, 1–5 April 2007. [Google Scholar] [CrossRef] [Green Version]
- Meng, L.; Sanseverino, E.R.; Luna, A.; Dragicevic, T.; Vasquez, J.C.; Guerrero, J.M. Microgrid Supervisory Controllers and Energy Management Systems: A Literature Review. Renew. Sustain. Energy Rev. 2016, 60, 1263–1273. [Google Scholar] [CrossRef]
- Paulitschke, M.; Bocklisch, T.; Böttiger, M. Sizing Algorithm for a PV-Battery-H2-Hybrid System Employing Particle Swarm Optimization. Energy Procedia 2015, 73, 154–162. [Google Scholar] [CrossRef] [Green Version]
- Paulitschke, M.; Bocklisch, T.; Böttiger, M. Comparison of Particle Swarm and Genetic Algorithm Based Design Algorithms for PV-Hybrid Systems with Battery and Hydrogen Storage Path. Energy Procedia 2017, 135, 452–463. [Google Scholar] [CrossRef]
- Saxena, S.; Hendricks, C.; Pecht, M. Cycle Life Testing and Modeling of Graphite/LiCoO2 Cells under Different State of Charge Ranges. J. Power Sources 2016, 327, 394–400. [Google Scholar] [CrossRef]
- Bocklisch, T. Optimierendes Energiemanagement von Brennstoffzelle-Direktspeicher-Hybridsystemen. Ph.D. Thesis, Technische Universität Chemnitz, Chemnitz, Germany, 2009. [Google Scholar]
- Barbir, F. PEM Electrolysis for Production of Hydrogen from Renewable Energy Sources. Solar Hydrog. 2005, 78, 661–669. [Google Scholar] [CrossRef]
- Pham, T.T.C. Introduction to Fuzzy Sets, Fuzzy Logic, and Fuzzy Control Systems; CRC Press: Boca Raton, FL, USA, 2001. [Google Scholar]
- Mamdani, E.H.; Assilian, S. An Experiment in Linguistic Synthesis with a Fuzzy Logic Controller. Int. J. Man-Mach. Stud. 1975, 7, 1–13. [Google Scholar] [CrossRef]
- Zadeh, L.A. Fuzzy Sets. Inf. Control 1965, 8, 338–353. [Google Scholar] [CrossRef] [Green Version]
- Schulz, G.; Graf, C. Regelungstechnik 2: Mehrgrößenregelung, Digitale Regelungstechnik, Fuzzy-Regelung, 3rd ed.; De Gruyter: München, Germany, 2013. [Google Scholar] [CrossRef]
- Rosyadi, M.; Muyeen, S.M.; Takahashi, R.; Tamura, J. A Design Fuzzy Logic Controller for a Permanent Magnet Wind Generator to Enhance the Dynamic Stability of Wind Farms. Appl. Sci. 2012, 2, 780–800. [Google Scholar] [CrossRef] [Green Version]
- Michels, K.; Kruse, R.; Klawonn, F.; Nürnberger, A. Fuzzy-Regelung: Grundlagen, Entwurf, Analyse; Springer-Lehrbuch; Springer: Berlin/Heidelberg, Germany, 2002. [Google Scholar] [CrossRef]
- Hussain, S.; Ahmed, M.A.; Lee, K.B.; Kim, Y.C. Fuzzy Logic Weight Based Charging Scheme for Optimal Distribution of Charging Power among Electric Vehicles in a Parking Lot. Energies 2020, 13, 3119. [Google Scholar] [CrossRef]
- Pedrycz, W. Why Triangular Membership Functions? Fuzzy Sets Syst. 1994, 64, 21–30. [Google Scholar] [CrossRef]
- Barua, A.; Mudunuri, L.; Kosheleva, O. Why Trapezoidal and Triangular Membership Functions Work So Well: Towards a Theoretical Explanation. J. Uncertain Syst. 2014, 8, 164–168. [Google Scholar]
- DIN. DIN 18015-3:2016-09, Electrical Installations in Residential Buildings—Part 3: Wiring and Disposition of Electrical Equipment; Technical Report; Beuth Verlag GmbH: Berlin, Germany, 2016. [Google Scholar] [CrossRef]
- Kennedy, J.; Eberhart, R. Particle Swarm Optimization. In Proceedings of the ICNN’95 - International Conference on Neural Networks, Perth, Australia, 27 November–1 December 1995; Volume 4, pp. 1942–1948. [Google Scholar] [CrossRef]
- Eberhart, R.; Kennedy, J. A New Optimizer Using Particle Swarm Theory. In Proceedings of the MHS’95— Sixth International Symposium on Micro Machine and Human Science, Nagoya, Japan, 4–6 October 1995; pp. 39–43. [Google Scholar] [CrossRef]
- Kennedy, J.F.; Eberhart, R.C.; Shi, Y. Swarm Intelligence; The Morgan Kaufmann Series in Evolutionary Computation; Morgan Kaufmann Publishers: San Francisco, CA, USA, 2001. [Google Scholar]
- Piotrowski, A.P.; Napiorkowski, J.J.; Piotrowska, A.E. Population Size in Particle Swarm Optimization. Swarm Evol. Comput. 2020, 58, 100718. [Google Scholar] [CrossRef]
- Arora, J.S. Introduction to Optimum Design, 3rd ed.; Academic Press: Boston, MA, USA, 2011. [Google Scholar]
- Tjaden, T.; Bergner, J.; Weniger, J.; Quaschning, V. Representative Electrical Load Profiles of Residential Buildings in Germany with a Temporal Resolution of One Second; ResearchGate: Berlin, Germany, 2015. [Google Scholar] [CrossRef]
- Böttiger, M.; Paulitschke, M.; Bocklisch, T. Systematic Experimental Pulse Test Investigation for Parameter Identification of an Equivalent Based Lithium-Ion Battery Model. Energy Procedia 2017, 135, 337–346. [Google Scholar] [CrossRef]
- Bocklisch, T.; Böttiger, M.; Paulitschke, M. Multi-Storage Hybrid System Approach and Experimental Investigations. Energy Procedia 2014, 46, 186–193. [Google Scholar] [CrossRef] [Green Version]
- Zhou, K.; Ferreira, J.A.; Haan, S. Optimal Energy Management Strategy and System Sizing Method for Stand-Alone Photovoltaic-Hydrogen Systems. Int. J. Hydrogen Energy 2008, 33, 477–489. [Google Scholar] [CrossRef]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| 1. | If (SOC is low) | and ( is NB) | then ( is PB) |
| 2. | If (SOC is low) | and ( is N) | then ( is PB) |
| 3. | If (SOC is low) | and ( is Z) | then ( is P) |
| 4. | If (SOC is low) | and ( is P) | then ( is Z) |
| 5. | If (SOC is low) | and ( is PB) | then ( is Z) |
| 6. | If (SOC is good) | and ( is NB) | then ( is Z) |
| 7. | If (SOC is good) | and ( is N) | then ( is Z) |
| 8. | If (SOC is good) | and ( is Z) | then ( is Z) |
| 9. | If (SOC is good) | and ( is P) | then ( is Z) |
| 10. | If (SOC is good) | and ( is PB) | then ( is Z) |
| 11. | If (SOC is high) | and ( is NB) | then ( is Z) |
| 12. | If (SOC is high) | and ( is N) | then ( is Z) |
| 13. | If (SOC is high) | and ( is Z) | then ( is N) |
| 14. | If (SOC is high) | and ( is P) | then ( is NB) |
| 15. | If (SOC is high) | and ( is PB) | then ( is NB) |
| () | ||||
|---|---|---|---|---|
| Electrolyzer | 4 kW | 70% | 20% | 80% |
| Fuel cell | 2.5 kW | 40% | 20% | 80% |
in % | in h | in h | in min | ||||
|---|---|---|---|---|---|---|---|
| Fuzzy | 6.83 | 155 | 1734 | 261 | 2046 | 0 | 101 |
| Hysteresis | 2.41 | 168 | 507 | 194 | 1258 | 0 | 123 |
| 1. | If (SOC is low) | and ( is NB) | then ( is PB) | → P |
| 2. | If (SOC is low) | and ( is N) | then ( is PB) | |
| 3. | If (SOC is low) | and ( is Z) | then ( is P) | |
| 4. | If (SOC is low) | and ( is P) | then ( is Z) | → P |
| 5. | If (SOC is low) | and ( is PB) | then ( is Z) | |
| 6. | If (SOC is good) | and ( is NB) | then ( is Z) | |
| 7. | If (SOC is good) | and ( is N) | then ( is Z) | |
| 8. | If (SOC is good) | and ( is Z) | then ( is Z) | |
| 9. | If (SOC is good) | and ( is P) | then ( is Z) | |
| 10. | If (SOC is good) | and ( is PB) | then ( is Z) | |
| 11. | If (SOC is high) | and ( is NB) | then ( is Z) | → N |
| 12. | If (SOC is high) | and ( is N) | then ( is Z) | → N |
| 13. | If (SOC is high) | and ( is Z) | then ( is N) | |
| 14. | If (SOC is high) | and ( is P) | then ( is NB) | → N |
| 15. | If (SOC is high) | and ( is PB) | then ( is NB) |
in % | in h | in h | in min | ||||
|---|---|---|---|---|---|---|---|
| Expert | 6.83 | 155 | 1734 | 261 | 2046 | 0 | 101 |
| OptRule | 6.88 | 124 | 1737 | 219 | 2103 | 0 | 101 |
| OptRuleE | 6.88 | 125 | 1736 | 219 | 2103 | 0 | 100 |
| OptMF | 7.27 | 90 | 1839 | 218 | 1904 | 0 | 97 |
in % | in h | in h | in min | ||||
|---|---|---|---|---|---|---|---|
| Expert | 6.83 | 155 | 1734 | 261 | 2046 | 0 | 101 |
| OptMF | 7.27 | 90 | 1839 | 218 | 1904 | 0 | 97 |
| OptMFE | 7.05 | 116 | 1777 | 220 | 1912 | 0 | 97 |
| OptMFER | 5.88 | 144 | 2017 | 228 | 1965 | 0 | 96 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gerlach, L.; Bocklisch, T. Experts versus Algorithms? Optimized Fuzzy Logic Energy Management of Autonomous PV Hybrid Systems with Battery and H2 Storage. Energies 2021, 14, 1777. https://doi.org/10.3390/en14061777
Gerlach L, Bocklisch T. Experts versus Algorithms? Optimized Fuzzy Logic Energy Management of Autonomous PV Hybrid Systems with Battery and H2 Storage. Energies. 2021; 14(6):1777. https://doi.org/10.3390/en14061777
Chicago/Turabian StyleGerlach, Lisa, and Thilo Bocklisch. 2021. "Experts versus Algorithms? Optimized Fuzzy Logic Energy Management of Autonomous PV Hybrid Systems with Battery and H2 Storage" Energies 14, no. 6: 1777. https://doi.org/10.3390/en14061777
APA StyleGerlach, L., & Bocklisch, T. (2021). Experts versus Algorithms? Optimized Fuzzy Logic Energy Management of Autonomous PV Hybrid Systems with Battery and H2 Storage. Energies, 14(6), 1777. https://doi.org/10.3390/en14061777