
Distributed Electric Vehicle Charging Scheduling with Transactive Energy Management


Abstract
:1. Introduction
- An innovative EV bidding strategy, designed to encourage individual EV customers to actively participate in the distribution network operation. Only charging demand and price information are shared with EVA and DSO in the bidding process. In this way, the communication complexity is reduced and the system’s security is improved.
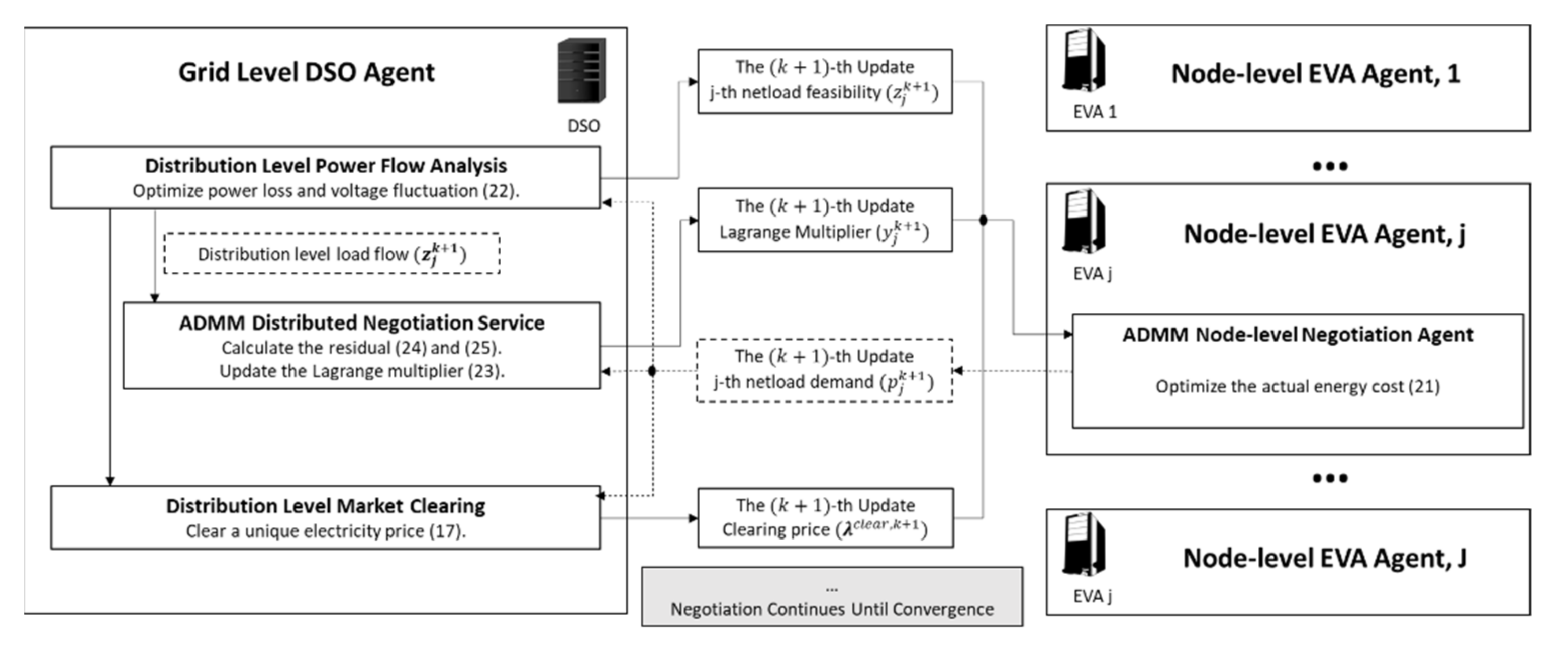
- A distributed multi-agent coordination algorithm was developed to integrate EV charging optimization with the distribution network OPF technique based on the alternating direction method of multipliers (ADMM). In this algorithm, EV charging scheduling and clearing electricity prices are determined through a negotiation process among DSOs and EVAs. EVAs ensure that EV charging requirements and charging cost economics are met, and DSOs guarantee the distribution network operation stability with OPF. The negotiation process finds a balance among EV charging requirements, EV charging economic benefits, and distribution system operation reliability.
- By applying transactive energy management, an EV charging price clearing mechanism is introduced. This mechanism engages EV bidding conditions, distribution system operation, and the electricity market, and then clearing of the electricity price in the negotiation process. The price signal is the only external signal for making the final EV charging decision.
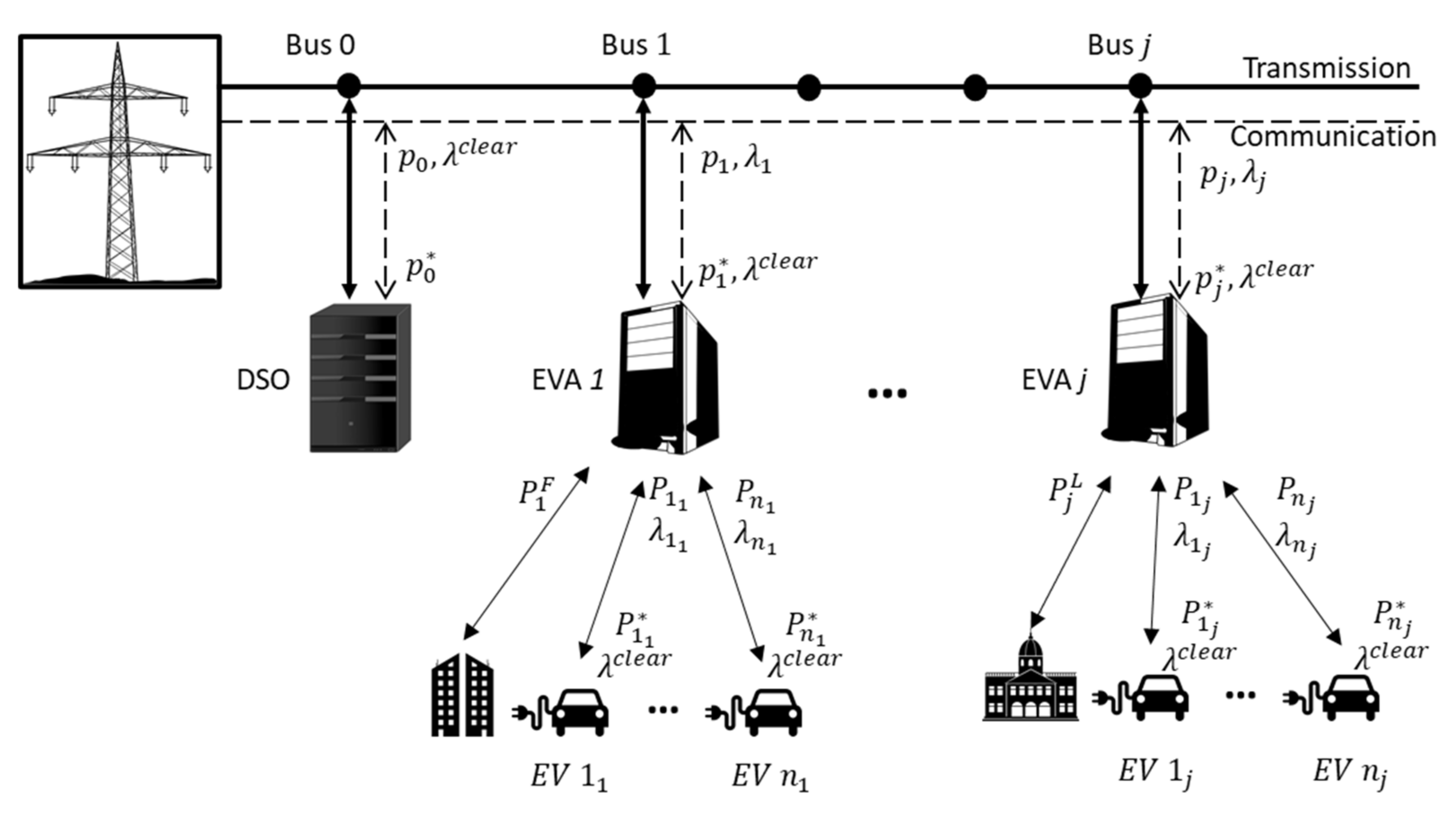
2. Overview of EV Charging Scheduling Management
3. EV Charging and Distribution Network Model
3.1. EV Charing Model
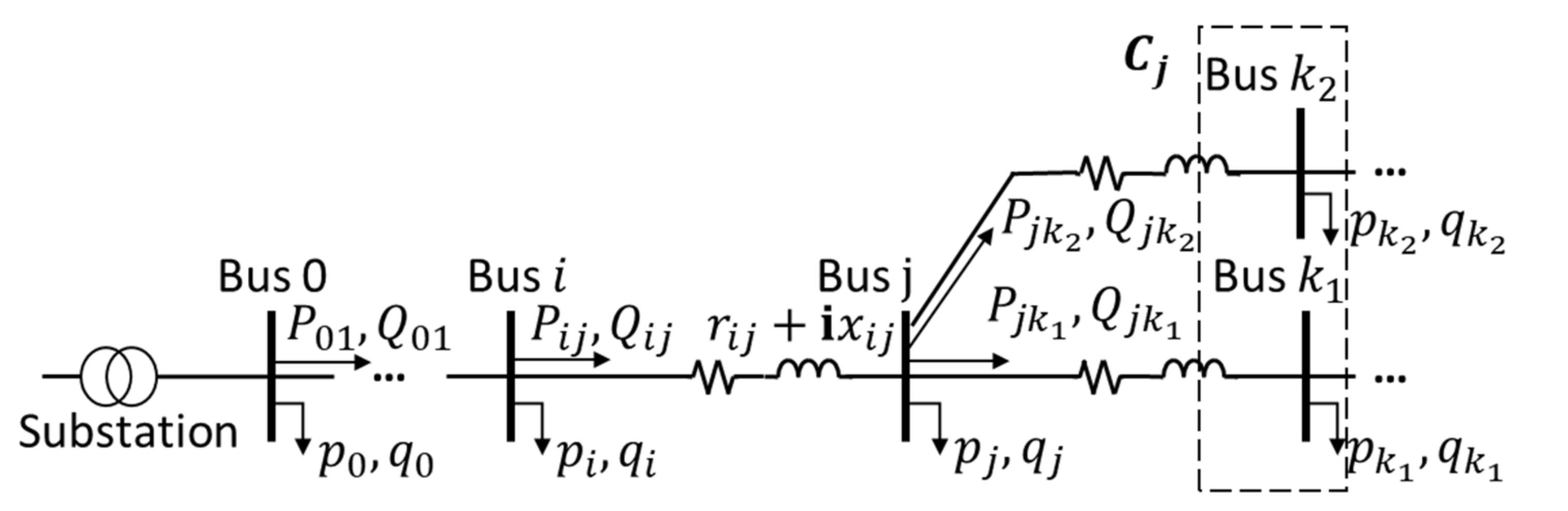
3.2. Distribution Network Model
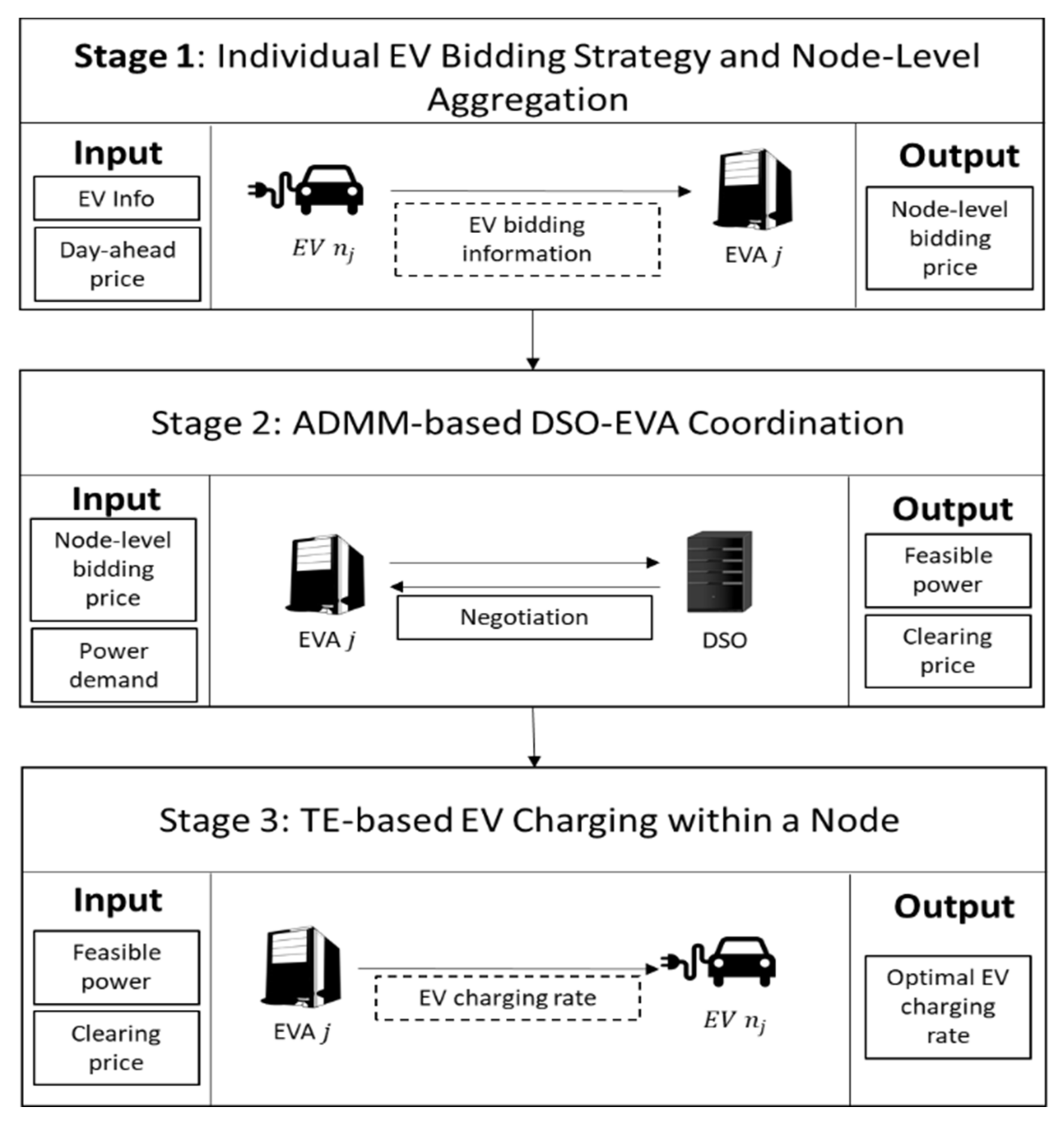
4. Problem Formulation of Distributed EV Charging Scheduling with Transactive Energy Management
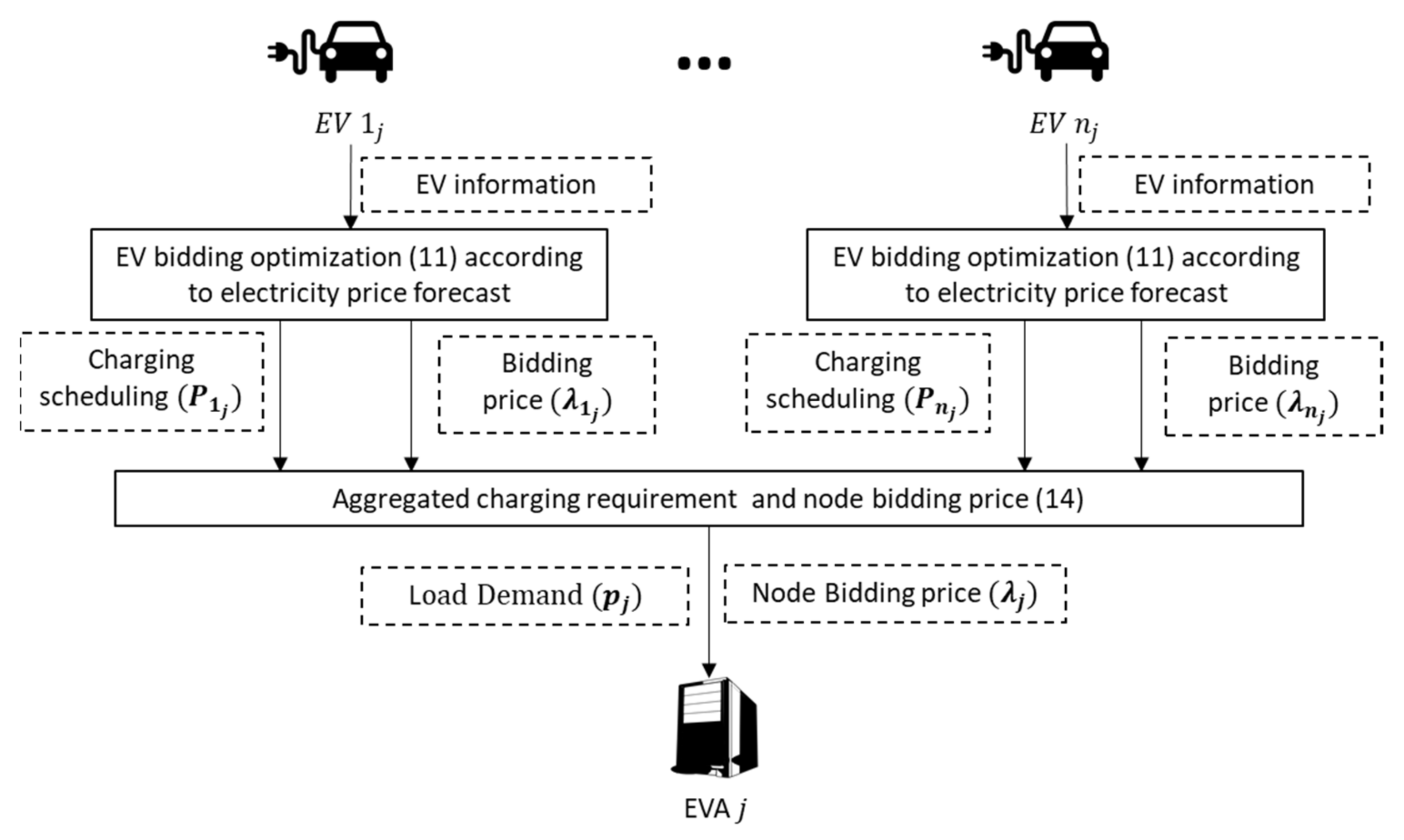
4.1. Individual EV Bidding Strategy and Node-Level Aggregation
4.2. ADMM-Based DSO-EVA Coordination
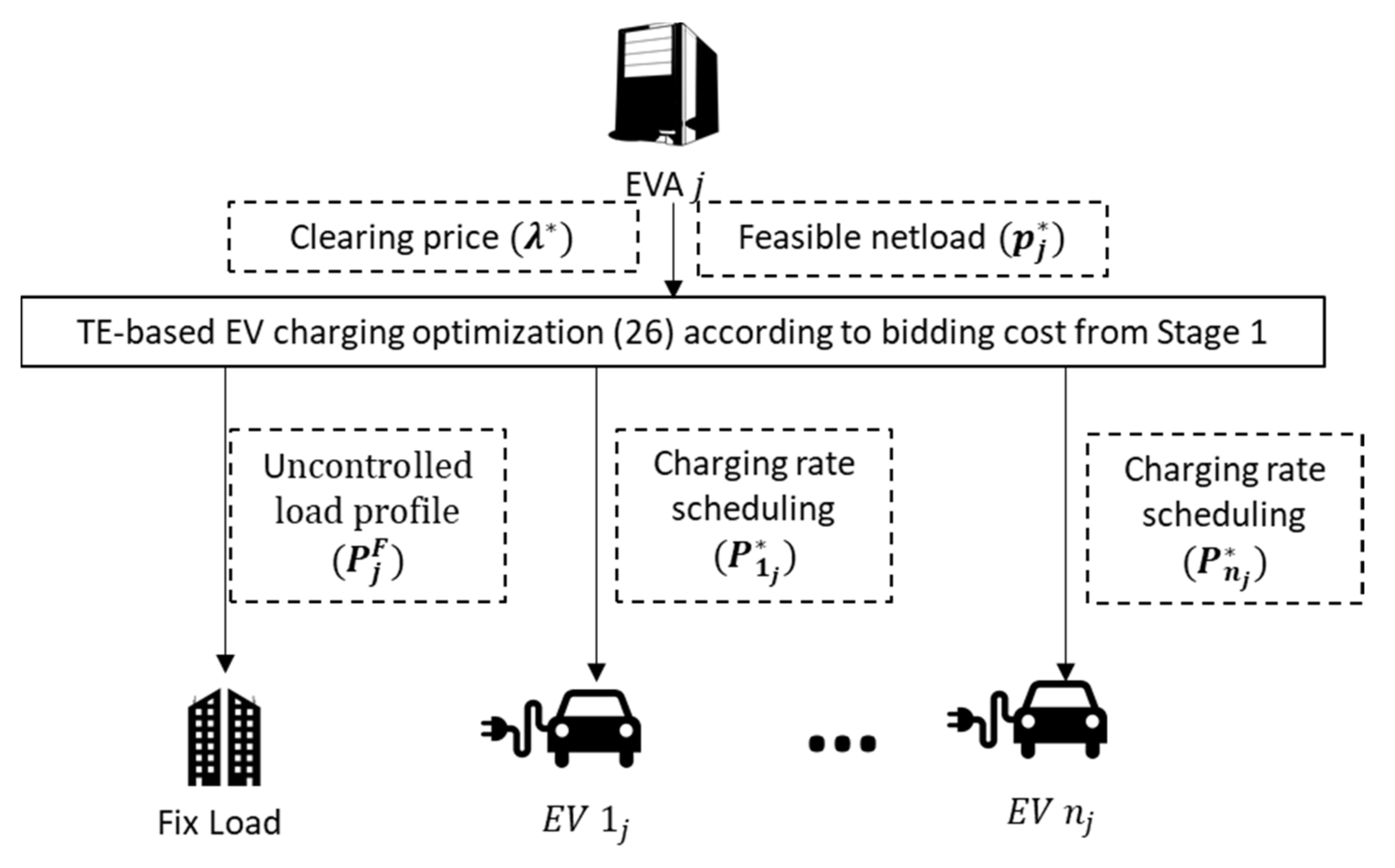
4.3. TE-based EV Charging within a Node
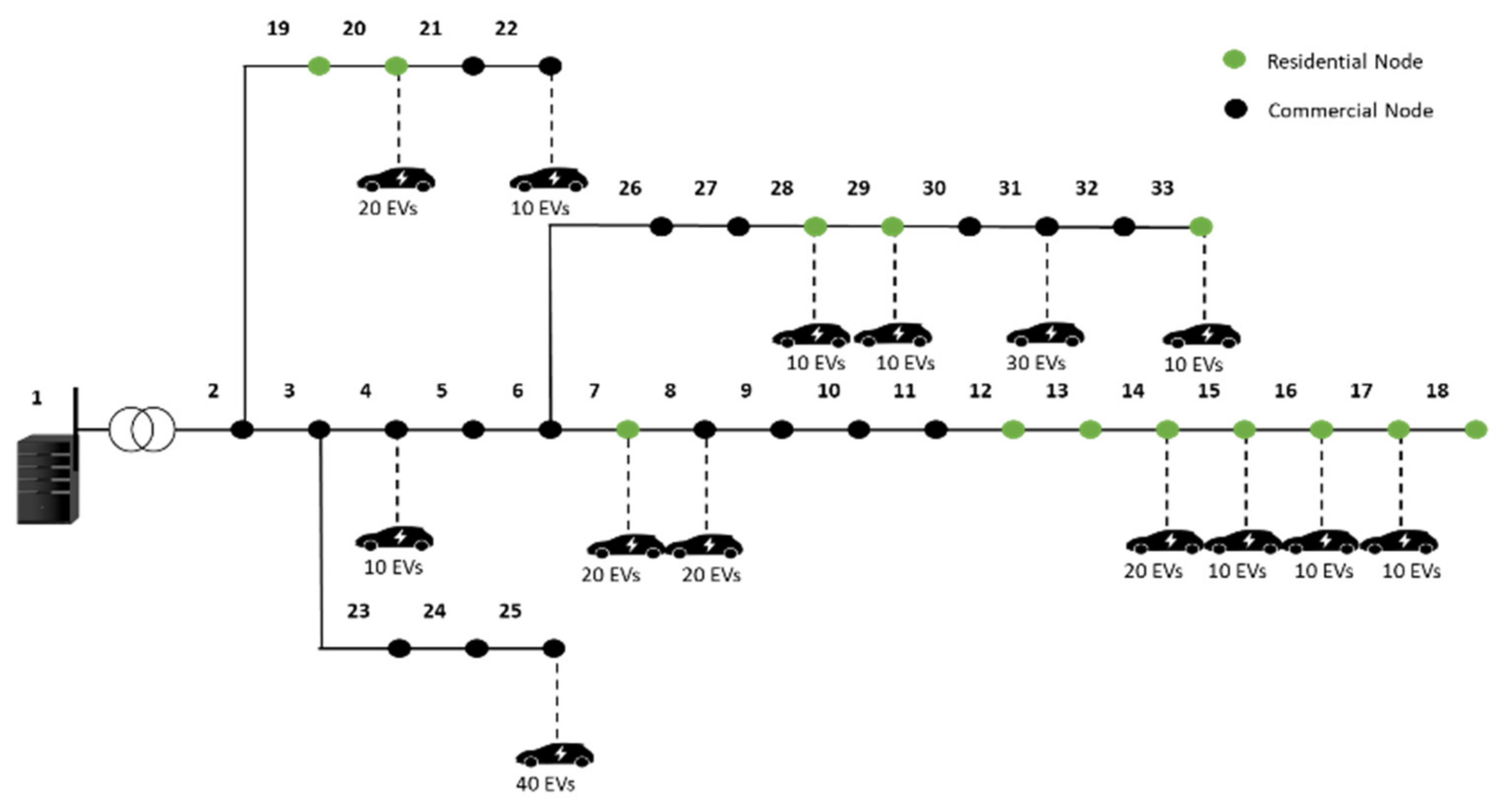
5. Use Case Study
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Bui, A.; Slowik, P.; Lutsey, N. Power Play: Evaluating the U.S. Position in the Global Electric Vehicle Transition; International Council on Clean Transportation: Washington, DC, USA, 2021; Available online: https://theicct.org/publications/us-position-global-ev-jun2021 (accessed on 29 July 2021).
- Jones, C.B.; Lave, M.; Vining, W.; Garcia, B.M. Uncontrolled Electric Vehicle Charging Impacts on Distribution Electric Power Systems with Primarily Residential, Commercial or Industrial Loads. Energies 2021, 14, 1688. [Google Scholar] [CrossRef]
- Wang, L.; Cao, C.; Chen, B. Grid-Tied Single-Phase Bi-Directional PEV Charging/Discharging Control. SAE Int. J. Passeng. Cars Electron. Electr. Syst. 2016, 9, 275–285. [Google Scholar] [CrossRef] [Green Version]
- Wang, L.; Cao, C.; Chen, B. Model-based micro-grid modeling and optimal PEV charging control. In Proceedings of the 2016 12th IEEE/ASME International Conference on Mechatronic and Embedded Systems and Applications (MESA), Auckland, New Zealand, 29–31 August 2016; pp. 1–6. [Google Scholar] [CrossRef]
- Cao, C.; Cheng, M.; Chen, B. Optimal Scheduling of PEV Charging/Discharging in Microgrids with Combined Objectives. Smart Grid Renew. Energy 2016, 7, 115–130. [Google Scholar] [CrossRef] [Green Version]
- Cao, C.; Chen, B. Generalized Nash equilibrium problem based electric vehicle charging management in distribution networks. Int. J. Energy Res. 2018, 42, 4584–4596. [Google Scholar] [CrossRef]
- Wang, L.; Chen, B. Dual-level consensus-based frequency regulation using vehicle-to-grid service. Electr. Power Syst. Res. 2019, 167, 261–276. [Google Scholar] [CrossRef]
- Cao, C.; Wu, Z.; Chen, B. Electric Vehicle–Grid Integration with Voltage Regulation in Radial Distribution Networks. Energies 2020, 13, 1802. [Google Scholar] [CrossRef] [Green Version]
- The GridWise Architecture Council. GridWise Transactive Energy Framework Version 1.0; Pacific Northwest National Laboratory: Richland, WA, USA, 2015; Available online: https://www.gridwiseac.org/pdfs/te_framework_report_pnnl-22946 (accessed on 29 July 2021).
- Chen, S.; Liu, C.C. From demand response to transactive energy: State of the art. J. Mod. Power Syst. Clean Energy 2017, 5, 10–19. [Google Scholar] [CrossRef] [Green Version]
- Lezama, F.; Soares, J.; Hernandez-Leal, P.; Kaisers, M.; Pinto, T.; Vale, Z. Local Energy Markets: Paving the Path Toward Fully Transactive Energy Systems. IEEE Trans. Power Syst. 2019, 34, 4081–4088. [Google Scholar] [CrossRef] [Green Version]
- Vayá, M.G.; Andersson, G. Optimal Bidding Strategy of a Plug-In Electric Vehicle Aggregator in Day-Ahead Electricity Markets Under Uncertainty. IEEE Trans. Power Syst. 2015, 30, 2375–2385. [Google Scholar] [CrossRef]
- Lakshmi, E.S.; Singh, S.P.; Padmanaban, S.; Leonowicz, Z.; Holm-Nielsen, J.B. Prosumer Energy Management For Optimal Utilization of Bid Fulfillment with EV Uncertainty Modeling. IEEE Trans. Ind. Appl. 2021, 1. [Google Scholar] [CrossRef]
- Gao, J.; Wong, T.; Wang, C.; Yu, J.Y. A Price-Based Iterative Double Auction for Charger Sharing Markets. IEEE Trans. Intell. Transp. Syst. 2021, 1–12. [Google Scholar] [CrossRef]
- Mohammad, A.; Zamora, R.; Lie, T.T. Transactive Energy Management of PV-Based EV Integrated Parking Lots. IEEE Syst. J. 2021, 15, 5674–5682. [Google Scholar] [CrossRef]
- Li, J.; Zhang, C.; Xu, Z.; Wang, J.; Zhao, J.; Zhang, Y.J.A. Distributed transactive energy trading framework in distribution networks. IEEE Trans. Power Syst. 2018, 33, 7215–7227. [Google Scholar] [CrossRef]
- Li, Z.; Su, S.; Jin, X.; Chen, H.; Li, Y.; Zhang, R. A hierarchical scheduling method of active distribution network considering flexible loads in office buildings. Int. J. Electr. Power Energy Syst. 2021, 131, 106768. [Google Scholar] [CrossRef]
- Hao, H.; Corbin, C.D.; Kalsi, K.; Pratt, R.G. Transactive Control of Commercial Buildings for Demand Response. IEEE Trans. Power Syst. 2017, 32, 774–783. [Google Scholar] [CrossRef]
- Wu, Z.; Cao, C.; Chen, B. Transactive Energy Based Approach for Large-Scale Plug-in Electric Vehicle Charging Control. In Proceedings of the 2019 IEEE PES Asia-Pacific Power and Energy Engineering Conference (APPEEC), Macao, China, 1–4 December 2019; pp. 1–5. [Google Scholar] [CrossRef]
- Wang, L.; Chen, B. Distributed control for large-scale plug-in electric vehicle charging with a consensus algorithm. Int. J. Electr. Power Energy Syst. 2019, 109, 369–383. [Google Scholar] [CrossRef]
- Zhou, Y.; Kumar, R.; Tang, S. Incentive-Based Distributed Scheduling of Electric Vehicle Charging Under Uncertainty. IEEE Trans. Power Syst. 2019, 34, 3–11. [Google Scholar] [CrossRef]
- Yan, L.; Chen, X.; Zhou, J.; Chen, Y.; Wen, J. Deep Reinforcement Learning for Continuous Electric Vehicles Charging Control With Dynamic User Behaviors. IEEE Trans. Smart Grid 2021, 12, 5124–5134. [Google Scholar] [CrossRef]
- Khaki, B.; Chu, C.; Gadh, R. Hierarchical distributed framework for EV charging scheduling using exchange problem. Appl. Energy 2019, 241, 461–471. [Google Scholar] [CrossRef] [Green Version]
- Lin, W.; Jin, X.; Jia, H.; Mu, Y.; Xu, T.; Xu, X.; Yu, X. Decentralized optimal scheduling for integrated community energy system via consensus-based alternating direction method of multipliers. Appl. Energy 2021, 302, 117448. [Google Scholar] [CrossRef]
- Farivar, M.; Low, S.H. Branch Flow Model: Relaxations and Convexification—Part I. IEEE Trans. Power Syst. 2013, 28, 2554–2564. [Google Scholar] [CrossRef]
- Baran, M.E.; Wu, F.F. Network Reconfiguration in Distribution Systems for Loss Reduction and Load Balancing. IEEE Trans. Power Deliv. 1989, 9, 101–102. [Google Scholar]
- Boyd, S.; Parikh, N.; Chu, E.; Peleato, B.; Eckstein, J. Distributed Optimization and Statistical Learning via the Alternating Direction Method of Multipliers. In Foundations and Trends® in Machine Learning; Now Publishers: Delft, The Netherlands, 2011; Volume 3. [Google Scholar] [CrossRef]
- EERE. Commercial and Residential Hourly Load Profiles for All TMY3 Locations in the United States, 1st ed. Available online: https://data.openei.org/ (accessed on 20 July 2021).
- Cao, C.; Wang, L.; Chen, B. Mitigation of the Impact of High Plug-in Electric Vehicle Penetration on Residential Distribution Grid Using Smart Charging Strategies. Energies 2016, 9, 1024. [Google Scholar] [CrossRef] [Green Version]
- ComEd. ComEd’S Hourly Pricing Program. Available online: https://hourlypricing.comed.com/ (accessed on 20 July 2021).
- Lofberg, J. YALMIP: A toolbox for modeling and optimization in MATLAB. In Proceedings of the 2004 IEEE International Conference on Robotics and Automation (IEEE Cat. No.04CH37508), Taipei, Taiwan, 2–4 September 2004; pp. 284–289. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Node Type | Node Number | Number of EV | Cost with TEM [¢] | Cost without TEM [¢] | Cost Reduction [%] |
|---|---|---|---|---|---|
| Commercial | 4 | 10 | 685.54 | 778.54 | 11.95 |
| 8 | 20 | 1732.07 | 1566.27 | 9.57 | |
| 22 | 10 | 445.9 | 568.7 | 21.59 | |
| 25 | 40 | 1990 | 2320.68 | 14.25 | |
| 31 | 30 | 2200.31 | 2432.68 | 9.55 | |
| Residential | 7 | 20 | 1404.41 | 3049.55 | 53.95 |
| 14 | 20 | 2846.94 | 1366.07 | 52.02 | |
| 15 | 10 | 1551.46 | 7045.9 | 54.59 | |
| 16 | 10 | 629.12 | 1405.74 | 55.25 | |
| 17 | 10 | 736.43 | 1589.63 | 53.67 | |
| 20 | 20 | 1518.65 | 2959.82 | 48.69 | |
| 28 | 10 | 647.3 | 1361.66 | 52.46 | |
| 29 | 10 | 695.28 | 1425.7 | 51.23 | |
| 33 | 10 | 721.79 | 1583.88 | 54.43 | |
| Overall | 230 | 17805.2 | 29454.82 | 39.55 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wu, Z.; Chen, B. Distributed Electric Vehicle Charging Scheduling with Transactive Energy Management. Energies 2022, 15, 163. https://doi.org/10.3390/en15010163
Wu Z, Chen B. Distributed Electric Vehicle Charging Scheduling with Transactive Energy Management. Energies. 2022; 15(1):163. https://doi.org/10.3390/en15010163
Chicago/Turabian StyleWu, Zhouquan, and Bo Chen. 2022. "Distributed Electric Vehicle Charging Scheduling with Transactive Energy Management" Energies 15, no. 1: 163. https://doi.org/10.3390/en15010163
APA StyleWu, Z., & Chen, B. (2022). Distributed Electric Vehicle Charging Scheduling with Transactive Energy Management. Energies, 15(1), 163. https://doi.org/10.3390/en15010163