
A Novel Optimal Power Allocation Control System with High Convergence Rate for DC Microgrids Cluster


Abstract
:1. Introduction
- ⮚
- ⮚
- Contrary to the existing works, the BES’s generation cost is considered in the optimization problem respecting SoC boundaries. BES charges during the electricity price if it is low and discharges if it is high.
- ⮚
- The global generations-demands power equilibrium in the multi-MGs is properly accomplished by fulfilling the boundaries of DGs output powers and T.L losses.
- ⮚
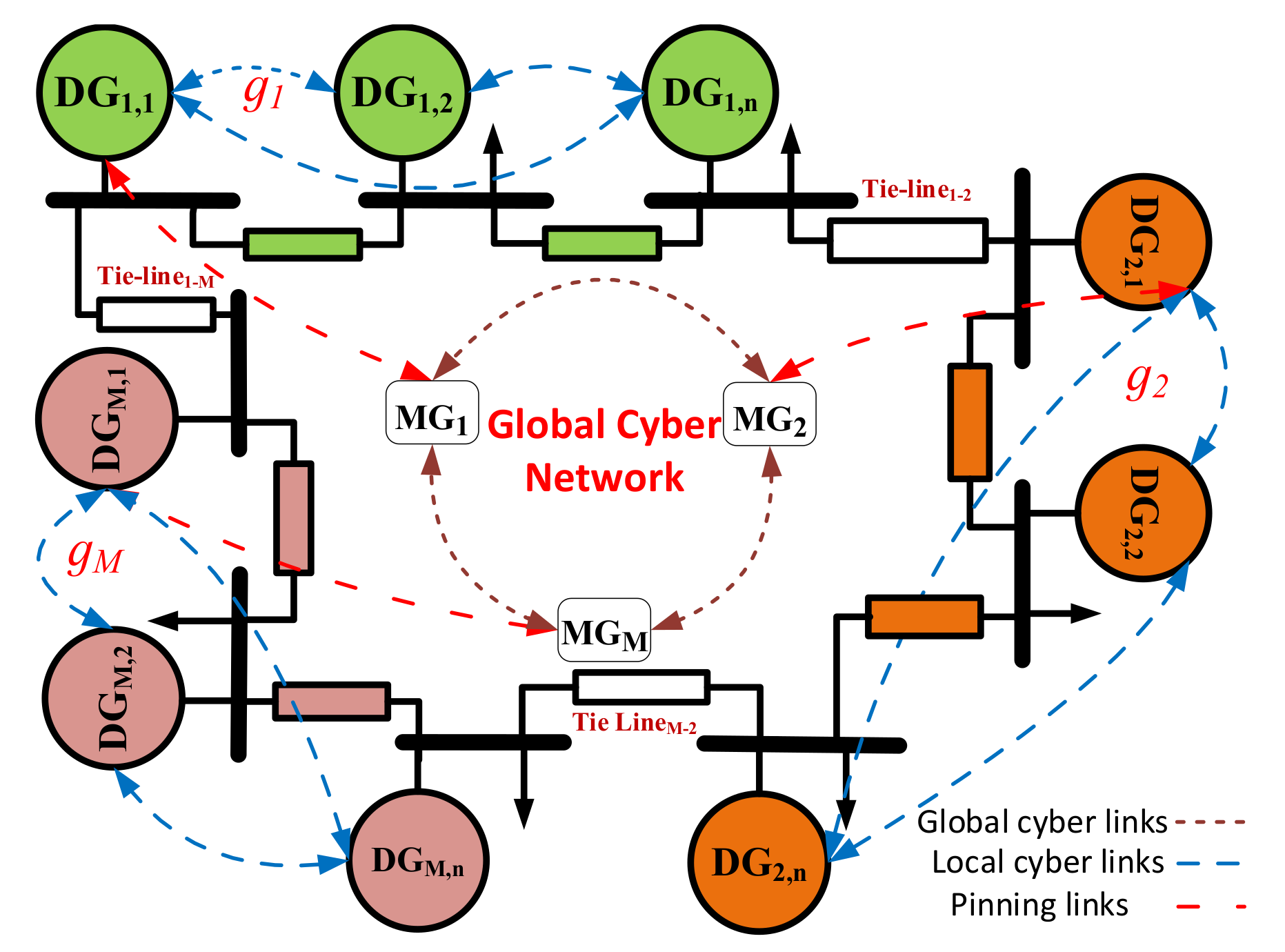
- A simple and sparse two-layer cyber network has been modeled to convey the information locally among local DGs, within each MG, and globally among the interconnected MGs.
- ⮚
- The proposed controller has the resiliency under both cyber losses and delays, as well as MG’s plug-and-play.
2. System Description and Preliminaries
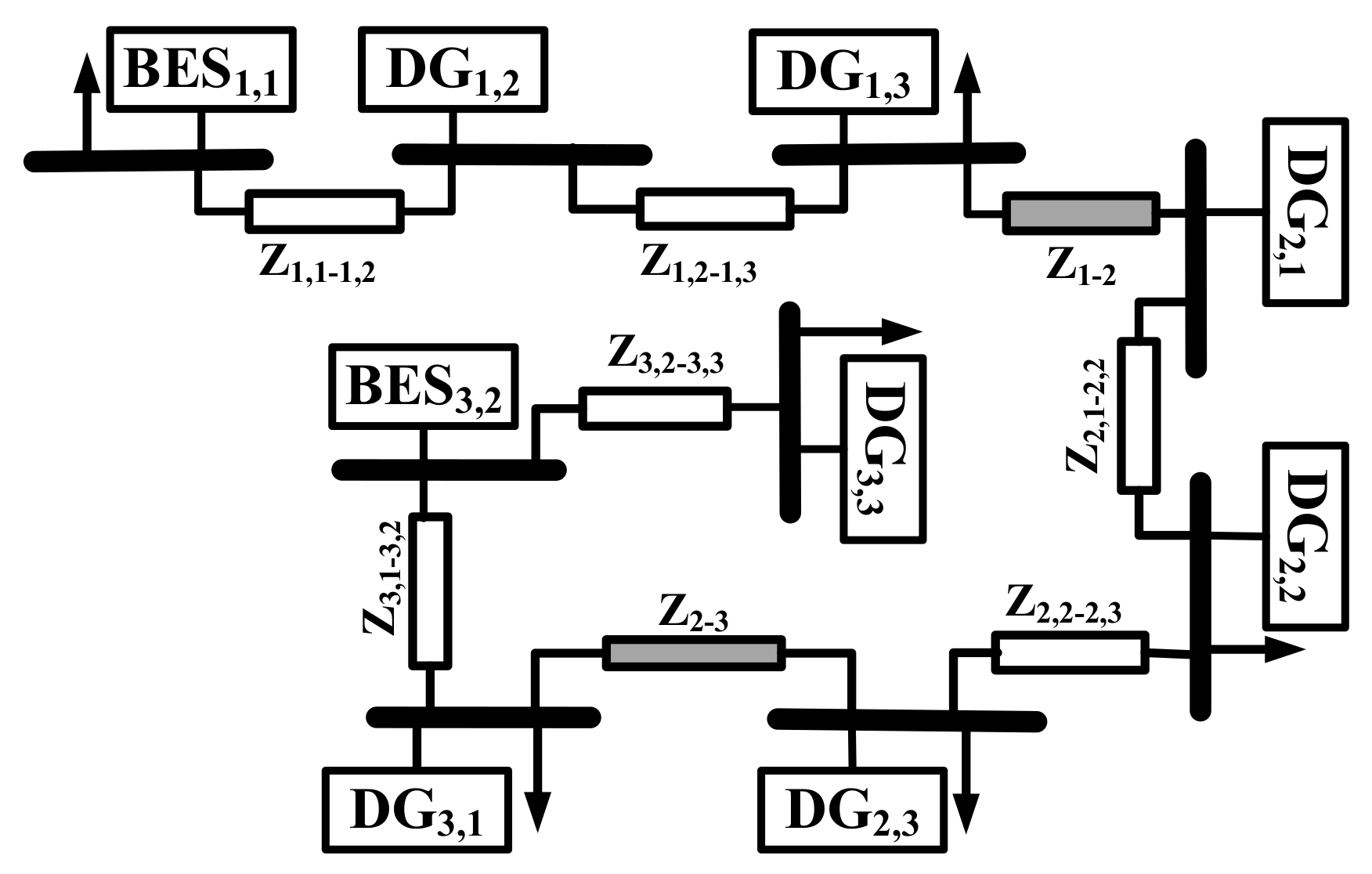
2.1. Modeling of DC Multi-MGs and the EDP
2.2. Two-Layers Cyber Networks
2.3. Hypothesis of the Finite-Time Controller
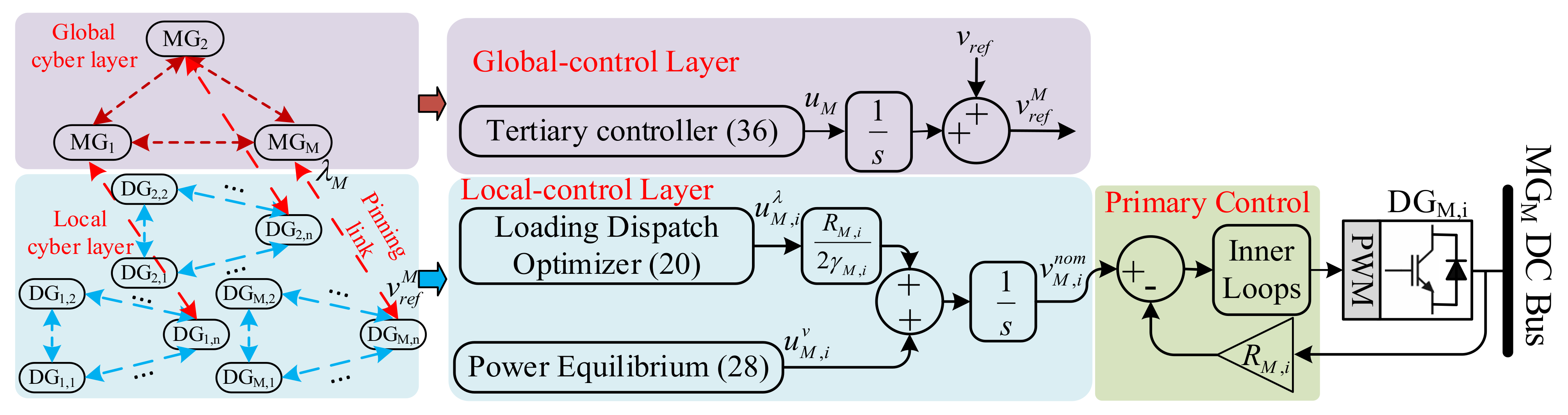
3. The Proposed Control Strategy
3.1. Local-Control Layer
3.1.1. Distributed Local Finite-Time Loading Dispatch Optimizer
3.1.2. Distributed Local Finite-Time Power Equilibrium
3.2. Global-Control Layer
4. Controller Verification
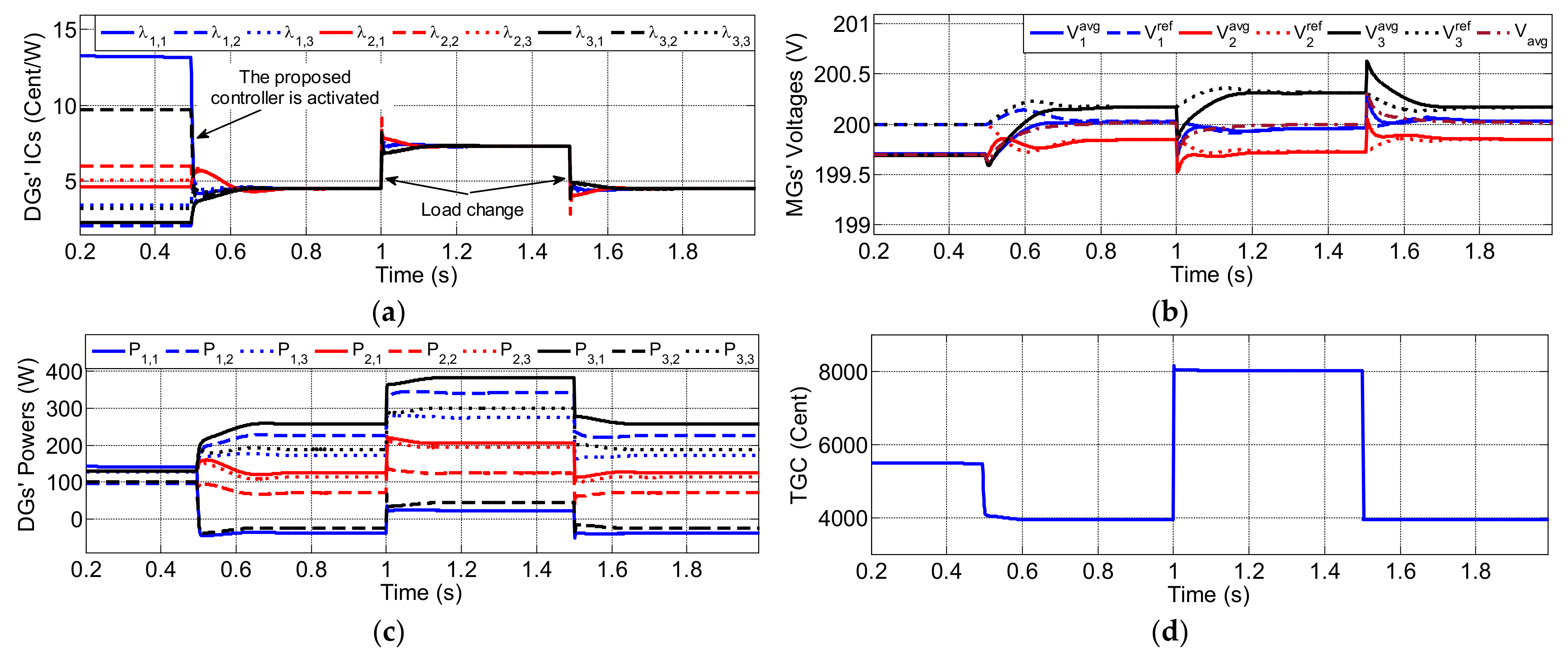
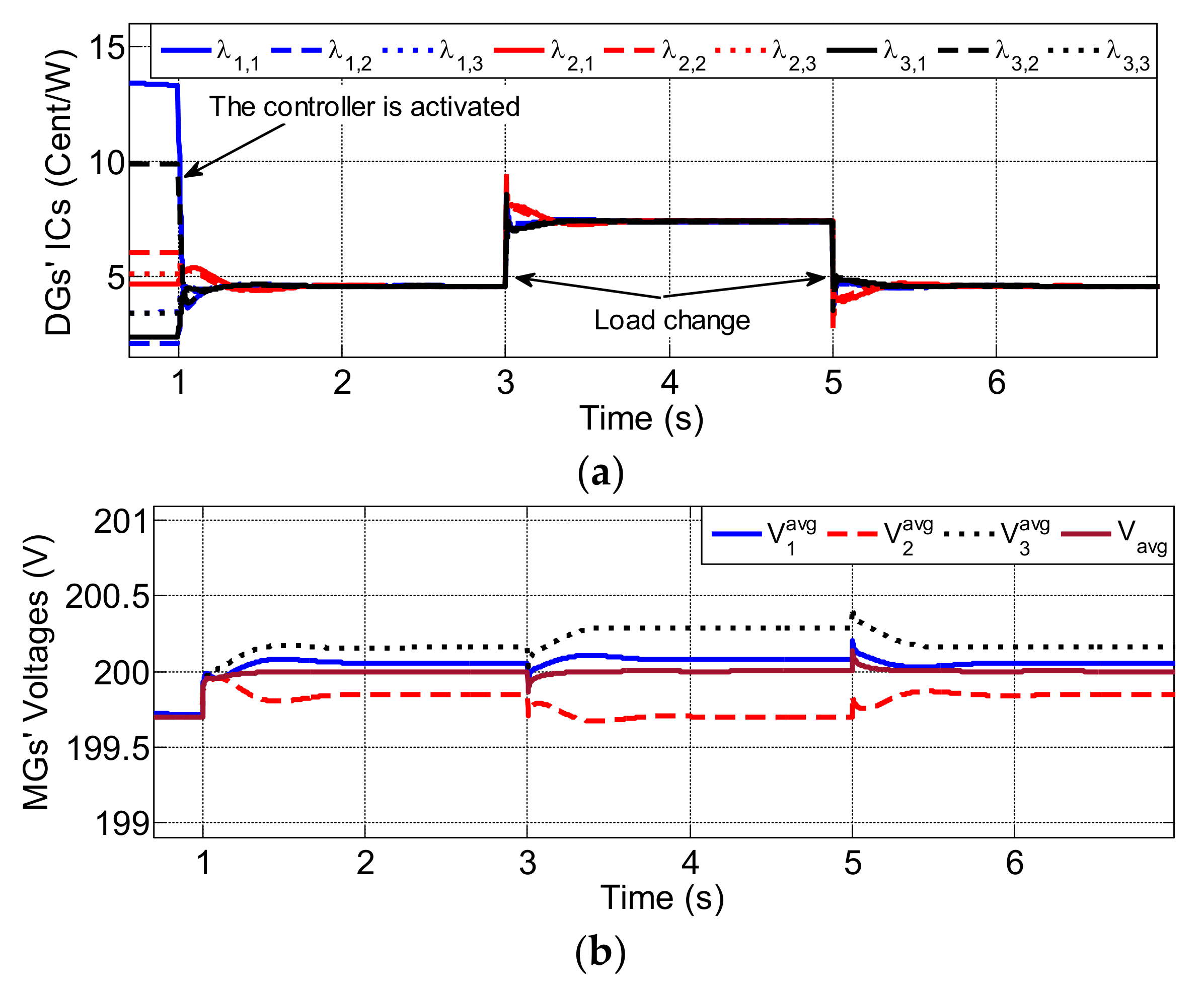
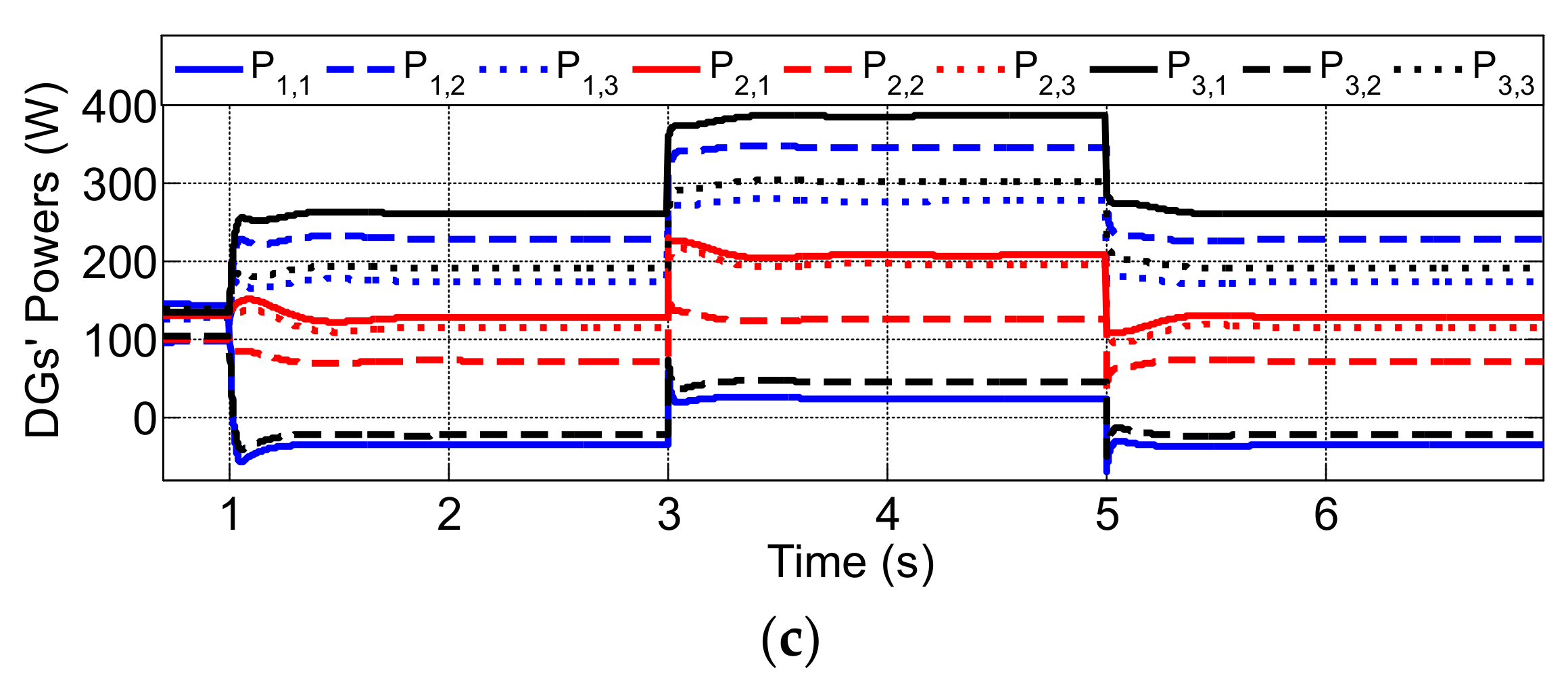
4.1. Controller Performance
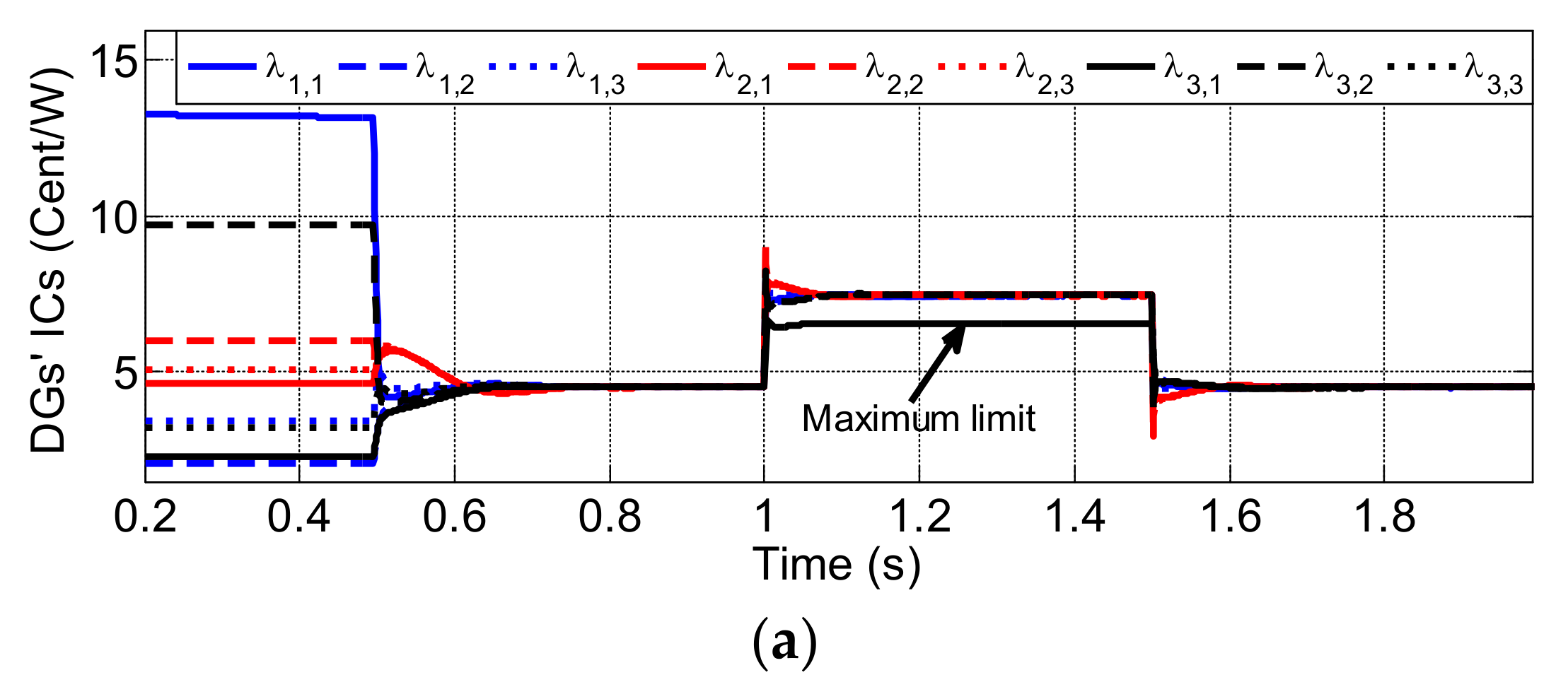
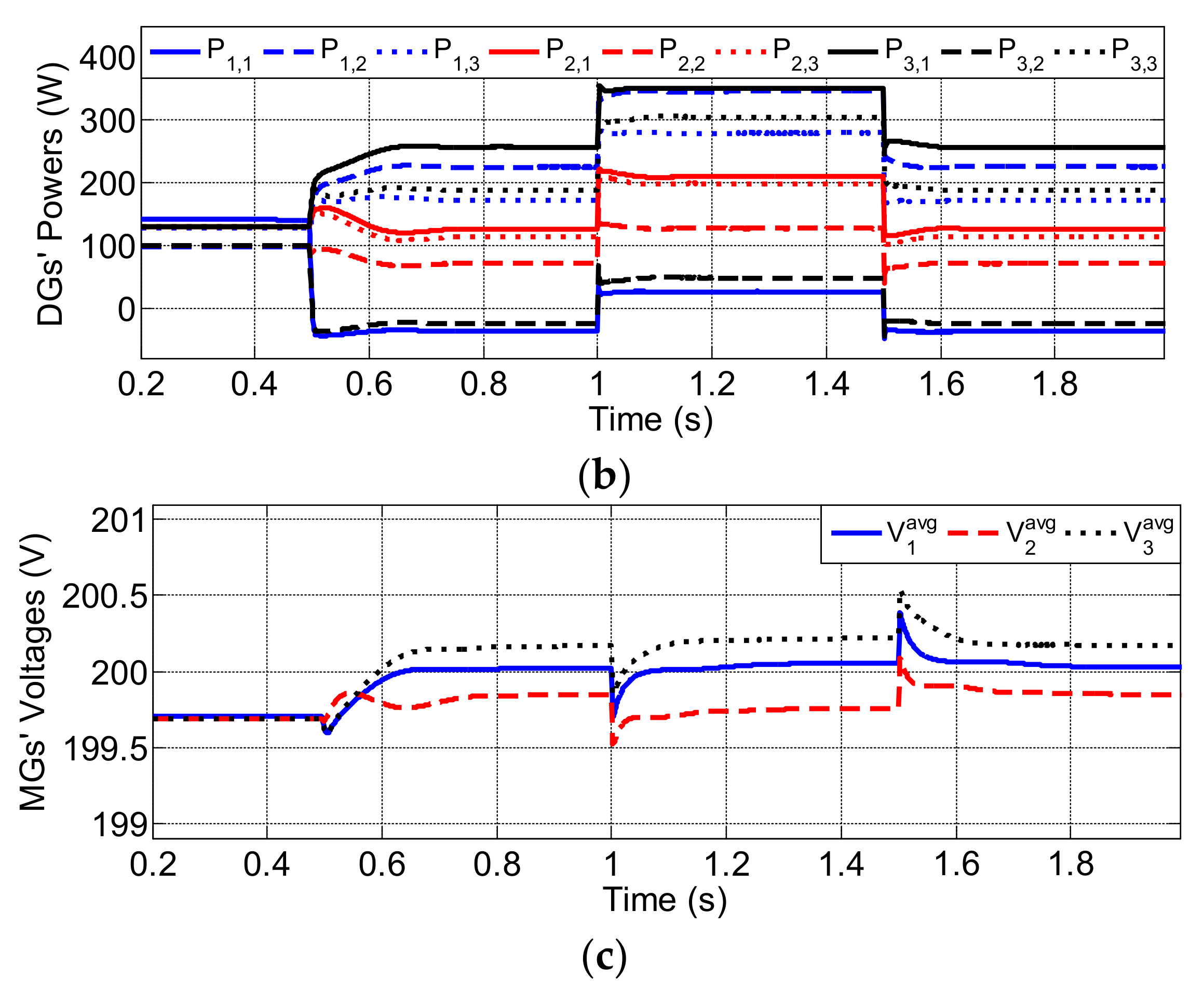
4.2. Controller Performance with Considering EDP’s Inequality Constraint
4.3. Comparative Study
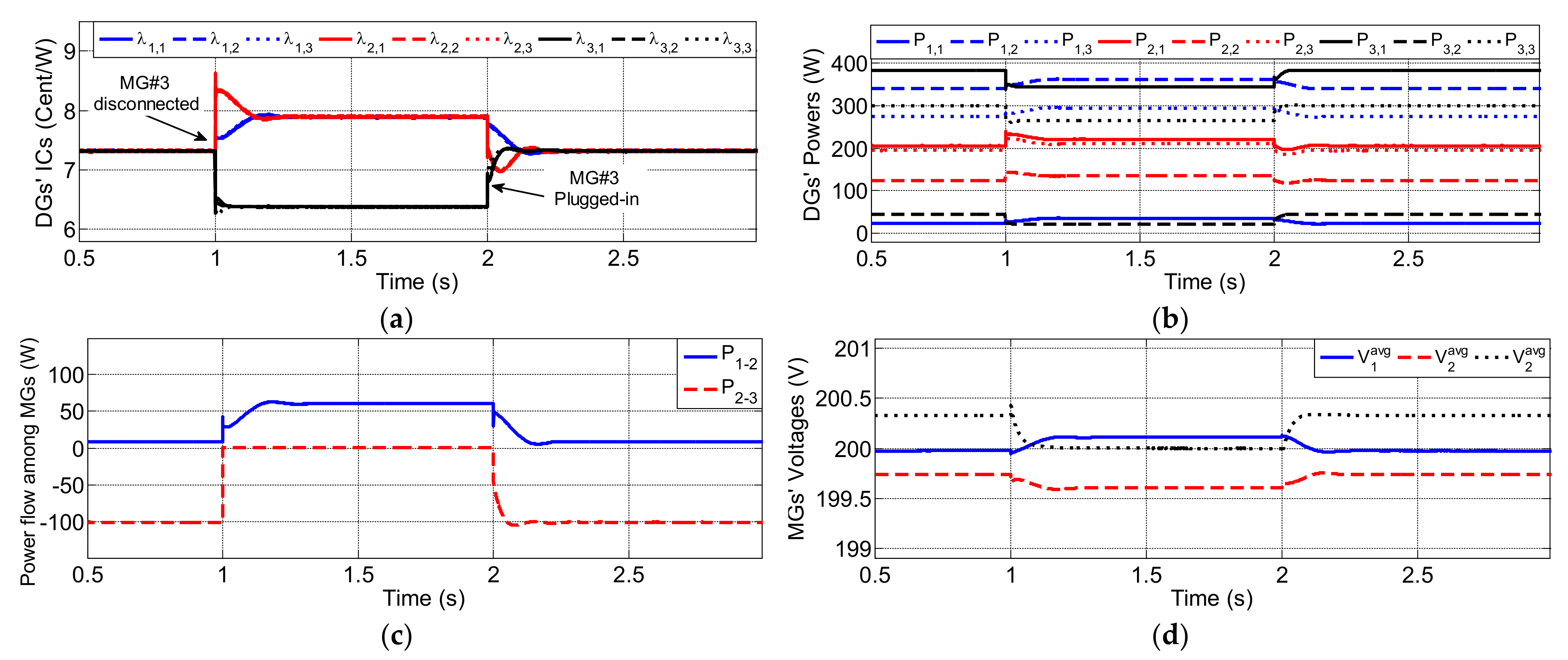
4.4. Plug-and-Play Feature
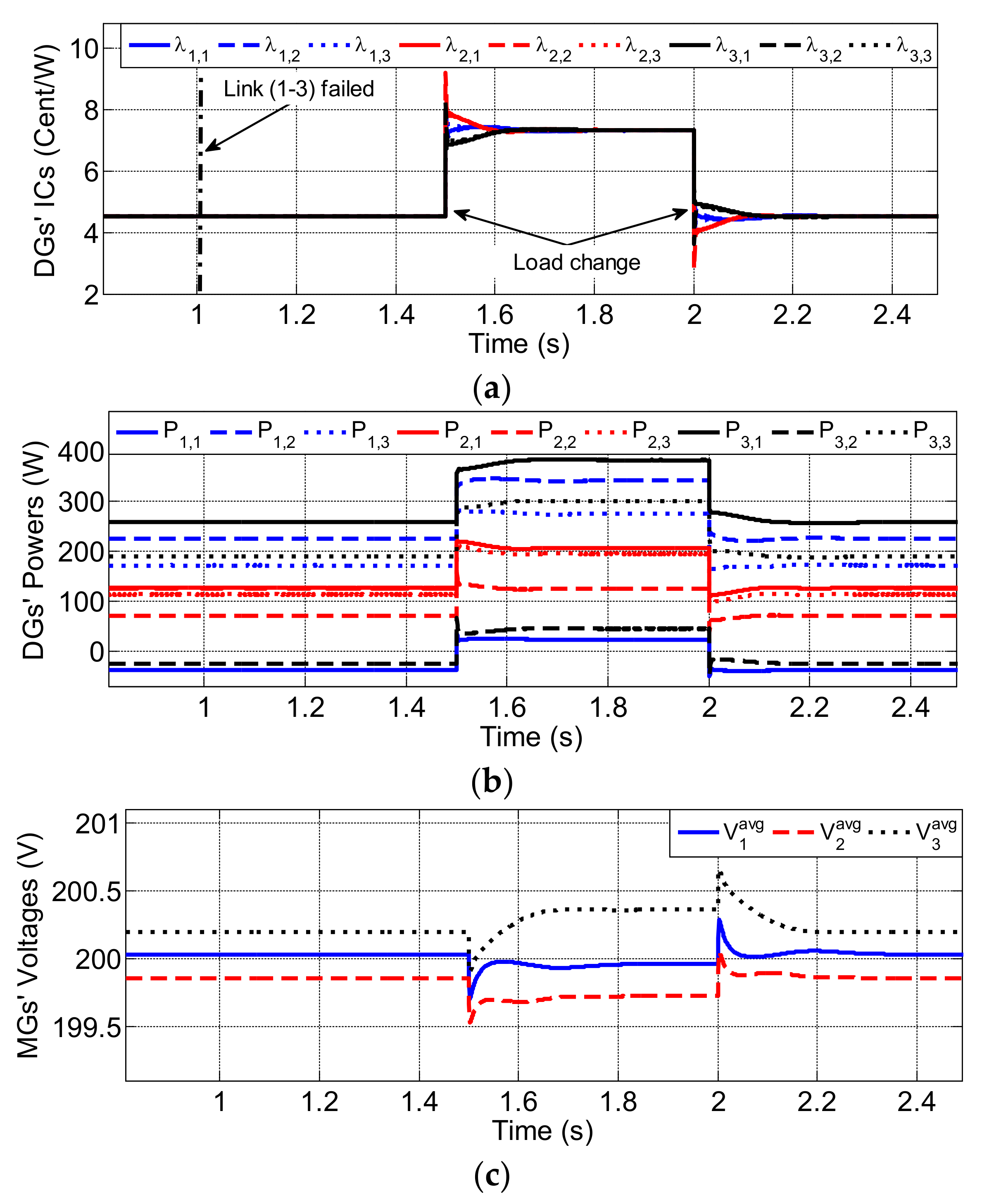
4.5. Communication Link Failure Resiliency
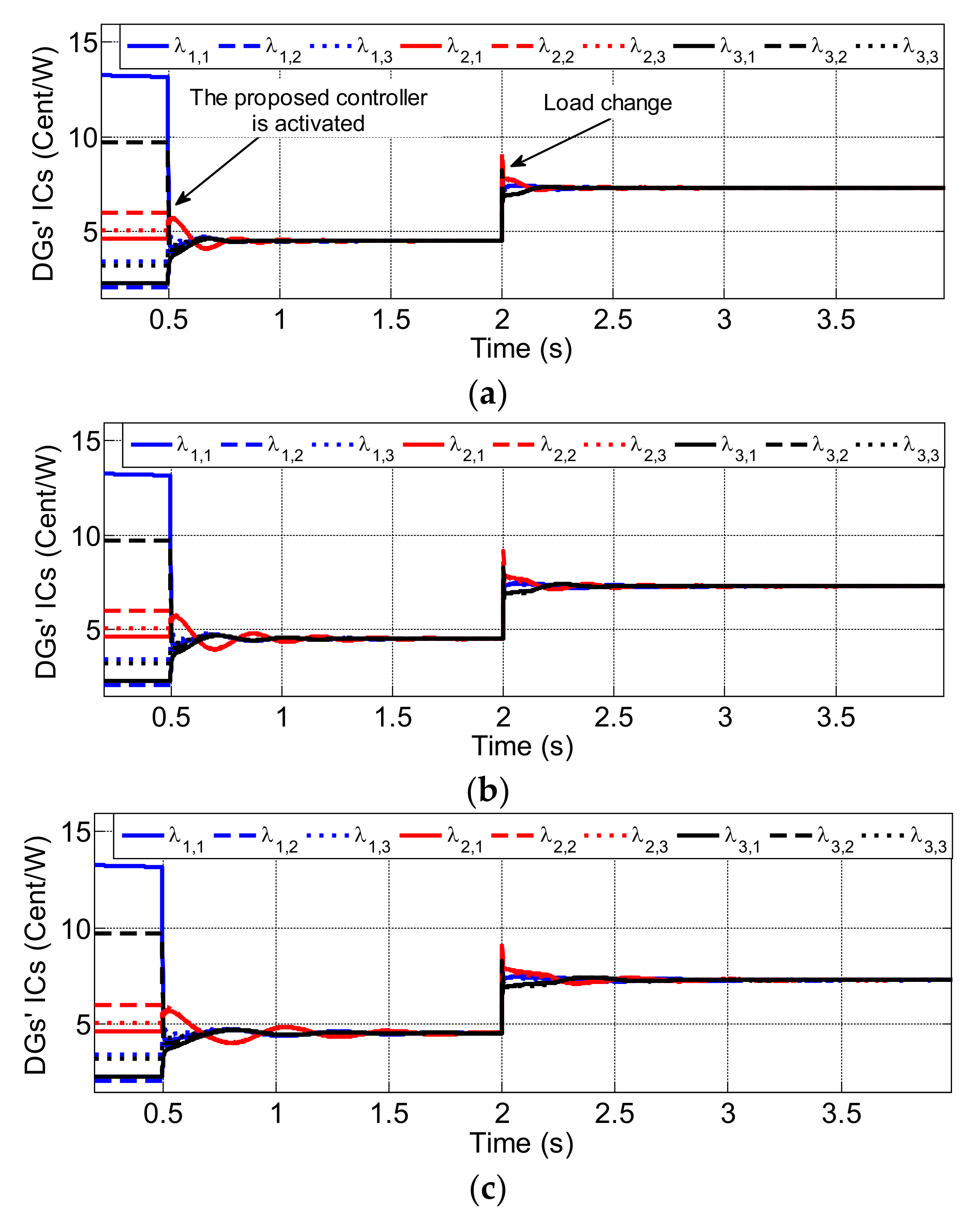
4.6. Communication Delays
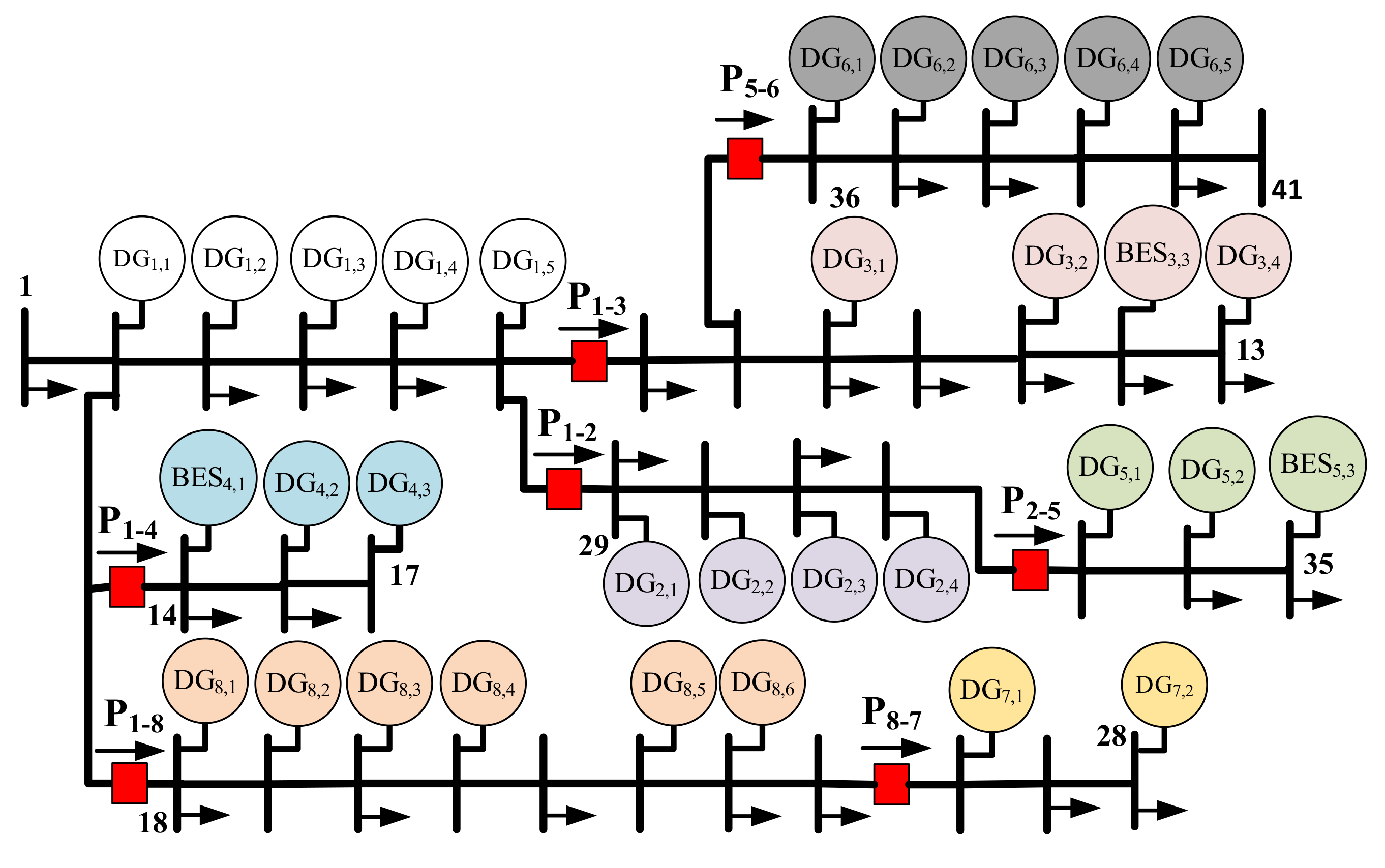
4.7. Scalability Verification
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Al-Ismail, F.S. DC Microgrid Planning, Operation, and Control: A Comprehensive Review. IEEE Access 2021, 9, 36154–36172. [Google Scholar] [CrossRef]
- Dastgeer, F.; Gelani, H.E.; Anees, H.M.; Paracha, Z.J.; Kalam, A. Analyses of Efficiency/Energy-Savings of DC Power Distribution Systems/Microgrids: Past, Present and Future. Int. J. Electr. Power Energy Syst. 2019, 104, 89–100. [Google Scholar] [CrossRef]
- Han, Y.; Ning, X.; Yang, P.; Xu, L. Review of Power Sharing, Voltage Restoration and Stabilization Techniques in Hierarchical Controlled DC Microgrids. IEEE Access 2019, 7, 149202–149223. [Google Scholar] [CrossRef]
- Fotopoulou, M.; Rakopoulos, D.; Trigkas, D.; Stergiopoulos, F.; Blanas, O.; Voutetakis, S. State of the Art of Low and Medium Voltage Direct Current (DC) Microgrids. Energies 2021, 14, 5595. [Google Scholar] [CrossRef]
- Chen, B.; Wang, J.; Lu, X.; Chen, C.; Zhao, S. Networked Microgrids for Grid Resilience, Robustness, and Efficiency: A Review. IEEE Trans. Smart Grid 2021, 12, 18–32. [Google Scholar] [CrossRef]
- Al-Tameemi, Z.H.A.; Lie, T.T.; Foo, G.; Blaabjerg, F. Control Strategies of DC Microgrids Cluster: A Comprehensive Review. Energies 2021, 14, 7569. [Google Scholar] [CrossRef]
- Li, Z.; Shahidehpour, M.; Aminifar, F.; Alabdulwahab, A.; Al-Turki, Y. Networked Microgrids for Enhancing the Power System Resilience. Proc. IEEE 2017, 105, 1289–1310. [Google Scholar] [CrossRef]
- Wang, Z.; Chen, B.; Wang, J.; Chen, C. Networked Microgrids for Self-Healing Power Systems. IEEE Trans. Smart Grid 2016, 7, 310–319. [Google Scholar] [CrossRef]
- Meng, L.; Shafiee, Q.; Trecate, G.F.; Karimi, H.; Fulwani, D.; Lu, X.; Guerrero, J.M. Review on Control of DC Microgrids and Multiple Microgrid Clusters. IEEE J. Emerg. Sel. Top. Power Electron. 2017, 5, 928–948. [Google Scholar]
- Guerrero, J.M.; Vasquez, J.C.; Matas, J.; De Vicuña, L.G.; Castilla, M. Hierarchical Control of Droop-Controlled AC and DC Microgrids—A General Approach toward Standardization. IEEE Trans. Ind. Electron. 2011, 58, 158–172. [Google Scholar] [CrossRef]
- Bidram, A.; Davoudi, A. Hierarchical Structure of Microgrids Control System. IEEE Trans. Smart Grid 2012, 3, 1963–1976. [Google Scholar] [CrossRef]
- Gao, F.; Kang, R.; Cao, J.; Yang, T. Primary and Secondary Control in DC Microgrids: A Review. J. Mod. Power Syst. Clean Energy 2019, 7, 227–242. [Google Scholar] [CrossRef] [Green Version]
- Olivares, D.E.; Mehrizi-Sani, A.; Etemadi, A.H.; Cañizares, C.A.; Iravani, R.; Kazerani, M.; Hajimiragha, A.H.; Gomis-Bellmunt, O.; Saeedifard, M.; Palma-Behnke, R.; et al. Trends in Microgrid Control. IEEE Trans. Smart Grid 2014, 5, 1905–1919. [Google Scholar] [CrossRef]
- Han, H.; Hou, X.; Yang, J.; Wu, J.; Su, M.; Guerrero, J.M. Review of Power Sharing Control Strategies for Is-landing Operation of AC Microgrids. IEEE Trans. Smart Grid 2016, 7, 200–215. [Google Scholar] [CrossRef] [Green Version]
- Guerrero, J.M.; Chandorkar, M.; Lee, T.L.; Loh, P.C. Advanced Control Architectures for Intelligent Microgrids Part I: Decentralized and Hierarchical Control. IEEE Trans. Ind. Electron. 2013, 60, 1254–1262. [Google Scholar] [CrossRef] [Green Version]
- Espina, E.; Llanos, J.; Burgos-Mellado, C.; Cárdenas-Dobson, R.; Martínez-Gómez, M.; Sáez, D. Distributed Control Strategies for Microgrids: An Overview. IEEE Access 2020, 8, 193412–193448. [Google Scholar] [CrossRef]
- Han, Y.; Zhang, K.; Li, H.; Coelho, E.A.A.; Guerrero, J.M. MAS-Based Distributed Coordinated Control and Optimization in Microgrid and Microgrid Clusters: A Comprehensive Overview. IEEE Trans. Power Electron. 2018, 33, 6488–6508. [Google Scholar] [CrossRef] [Green Version]
- Shafiee, Q.; Dragičević, T.; Vasquez, J.C.; Guerrero, J.M. Hierarchical Control for Multiple DC-Microgrids Clusters. IEEE Trans. Energy Convers. 2014, 29, 922–933. [Google Scholar] [CrossRef] [Green Version]
- Moayedi, S.; Davoudi, A. Distributed Tertiary Control of DC Microgrid Clusters. IEEE Trans. Power Electron. 2016, 31, 1717–1733. [Google Scholar] [CrossRef]
- Han, R.; Tucci, M.; Martinelli, A.; Guerrero, J.M.; Ferrari-Trecate, G. Stability Analysis of Primary Plug-and-Play and Secondary Leader-Based Controllers for DC Microgrid Clusters. IEEE Trans. Power Syst. 2019, 34, 1780–1800. [Google Scholar] [CrossRef] [Green Version]
- Lu, X.; Lai, J. Distributed Cluster Cooperation for Multiple DC MGs over Two-Layer Switching Topologies. IEEE Trans. Smart Grid 2020, 11, 4676–4687. [Google Scholar] [CrossRef]
- Chen, Z.; Yu, X.; Xu, W.; Wen, G. Modeling and Control of Islanded DC Microgrid Clusters with Hierarchical Event-Triggered Consensus Algorithm. IEEE Trans. Circuits Syst. I Regul. Pap. 2021, 68, 376–386. [Google Scholar] [CrossRef]
- Jena, S.; Padhy, N.P.; Guerrero, J.M. Cyber-Resilient Cooperative Control of DC Microgrid Clusters. IEEE Syst. J. 2021. [Google Scholar] [CrossRef]
- Babazadeh-Dizaji, R.; Hamzeh, M. Distributed Hierarchical Control for Optimal Power Dispatch in Multiple DC Microgrids. IEEE Syst. J. 2020, 14, 1015–1023. [Google Scholar] [CrossRef]
- Zaery, M.; Wang, P.; Wang, W.; Xu, D. Distributed Global Economical Load Sharing for a Cluster of DC Microgrids. IEEE Trans. Power Syst. 2020, 35, 3410–3420. [Google Scholar] [CrossRef]
- Mudaliyar, S.; Duggal, B.; Mishra, S. Distributed Tie-Line Power Flow Control of Autonomous DC Microgrid Clusters. IEEE Trans. Power Electron. 2020, 35, 11250–11266. [Google Scholar] [CrossRef]
- Lu, X.; Lai, J.; Liu, G.-P. Master-Slave Cooperation for Multi-DC-MGs via Variable Cyber Networks. IEEE Trans. Cybern. 2021, 1–14. [Google Scholar] [CrossRef]
- Xu, Q.; Xu, Y.; Xu, Z.; Xie, L.; Blaabjerg, F. A Hierarchically Coordinated Operation and Control Scheme for DC Microgrid Clusters under Uncertainty. IEEE Trans. Sustain. Energy 2021, 12, 273–283. [Google Scholar] [CrossRef]
- Olfati-Saber, R.; Murray, R.M. Consensus Problems in Networks of Agents with Switching Topology and Time-Delays. IEEE Trans. Autom. Control. 2004, 49, 1520–1533. [Google Scholar] [CrossRef] [Green Version]
- Li, Y.; Dong, P.; Liu, M.; Yang, G. A Distributed Coordination Control Based on Finite-Time Consensus Algorithm for a Cluster of Dc Microgrids. IEEE Trans. Power Syst. 2019, 34, 2205–2215. [Google Scholar] [CrossRef]
- Wang, L.; Xiao, F. Finite-Time Consensus Problems for Networks of Dynamic Agents. IEEE Trans. Autom. Control. 2010, 55, 950–955. [Google Scholar] [CrossRef]
- Zaery, M.; Wang, P.; Wang, W.; Xu, D. Distributed finite-time controller for economic operation of dc multi-microgrids. In Proceedings of the IECON 2019—45th Annual Conference of the IEEE Industrial Electronics Society, Lisbon, Portugal, 14–17 October 2019; pp. 2154–2159. [Google Scholar]
- Zaery, M.; Wang, P.; Wang, W.; Xu, D. A Novel Fully Distributed Fixed-Time Optimal Dispatch of DC Multi-Microgrids. Int. J. Electr. Power Energy Syst. 2021, 129, 106792. [Google Scholar] [CrossRef]
- De Azevedo, R.; Cintuglu, M.H.; Ma, T.; Mohammed, O.A. Multiagent-Based Optimal Microgrid Control Using Fully Distributed Diffusion Strategy. IEEE Trans. Smart Grid 2017, 8, 1997–2008. [Google Scholar] [CrossRef]
- Zhou, C.; Qian, K.; Allan, M.; Zhou, W. Modeling of the Cost of EV Battery Wear Due to V2G Application in Power Systems. IEEE Trans. Energy Convers. 2011, 26, 1041–1050. [Google Scholar] [CrossRef]
- Zhang, Y.; Chow, M.Y. Microgrid Cooperative Distributed Energy Scheduling (CoDES) Considering Battery Degradation Cost. In Proceedings of the IEEE International Symposium on Industrial Electronics, Santa Clara, CA, USA, 8–10 June 2016; pp. 720–725. [Google Scholar]
- Soliman, S.A.-H.; Mantawy, A.-A.H. Modern Optimization Techniques with Applications in Electric Power Systems; Energy Systems; Springer: New York, NY, USA, 2012. [Google Scholar]
- Yang, S.; Tan, S.; Xu, J.X. Consensus Based Approach for Economic Dispatch Problem in a Smart Grid. IEEE Trans. Power Syst. 2013, 28, 4416–4426. [Google Scholar] [CrossRef]
- Qu, Z. Cooperative Control of Dynamical Systems: Applications to Autonomous Vehicles; Springer: London, UK, 2009. [Google Scholar]
- Bhat, S.P.; Bernstein, D.S. Finite-Time Stability of Continuous Autonomous Systems. SIAM J. Control. Optim. 2000, 38, 751–766. [Google Scholar] [CrossRef]
- Zuo, Z.; Tie, L. Distributed Robust Finite-Time Nonlinear Consensus Protocols for Multi-Agent Systems. Int. J. Syst. Sci. 2016, 47, 1366–1375. [Google Scholar] [CrossRef]
- Zhang, H.; Lewis, F.L.; Qu, Z. Lyapunov, Adaptive, and Optimal Design Techniques for Cooperative Systems on Directed Communication Graphs. IEEE Trans. Ind. Electron. 2012, 59, 3026–3041. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Perspectives | [24] | [25] | [26] | [27] | [28] | [30] | [32] | [33] | Proposed |
|---|---|---|---|---|---|---|---|---|---|
| Fully distributed Scheme | √ | √ | √ | √ | √ | √ | √ | √ | |
| Rapid convergent rate | √ | √ | √ | √ | |||||
| Optimal load scheduling | √ | √ | √ | √ | √ | √ | √ | √ | √ |
| Generation-demand balance | √ | √ | √ | √ | √ | √ | √ | √ | √ |
| DGs power limits | √ | √ | √ | √ | √ | √ | √ | √ | |
| T.L losses minimization | √ | √ | √ | ||||||
| BES economic operation | √ | ||||||||
| MG’s Plug-and-Play capability | √ | √ | √ | √ | √ | √ | √ | √ | √ |
| Cyber losses resiliency | √ | √ | √ | √ | √ | √ | √ | √ | |
| Cyber delays resiliency | √ | √ | √ | √ | √ | √ | √ |
| DGs’ Production Costs | |||||
|---|---|---|---|---|---|
| 110 | 0.95 | 0.022 | 80 | ||
| 75 | 0.55 | 0.007 | 500 | ||
| 85 | 0.62 | 0.01 | 400 | ||
| 90 | 0.65 | 0.014 | 350 | ||
| 120 | 0.98 | 0.024 | 300 | ||
| 95 | 0.91 | 0.015 | 450 | ||
| 60 | 0.5 | 0.006 | 330 | ||
| 100 | 0.93 | 0.019 | 90 | ||
| 80 | 0.61 | 0.009 | 550 | ||
| Transmission Lines Factors | |||||
| T.L | |||||
| Local | 0.6 | 50 | 30 | ||
| Global | 1.2 | 100 | 60 | ||
| Dual-Layer Control System Parameters | |||||
| 10 | 10 | 2 | 0.6 | 0.6 | |
| 0.6 | 0.75 | 0.91 | 0.8 | 0.55 | 0.51 | 0.54 | 0.9 | |
| 0.013 | 0.025 | 0.038 | 0.029 | 0.01 | 0.007 | 0.009 | 0.037 | |
| 0.87 | 0.67 | 0.84 | 0.63 | 0.8 | 0.95 | 0.88 | 0.66 | |
| 0.034 | 0.019 | 0.032 | 0.015 | 0.029 | 0.014 | 0.035 | 0.018 | |
| 0.53 | 0.69 | 0.98 | 0.71 | 0.65 | 0.57 | 0.73 | 0.82 | |
| 0.008 | 0.02 | 0.044 | 0.022 | 0.017 | 0.011 | 0.023 | 0.031 | |
| 0.58 | 0.76 | 0.78 | 0.94 | 0.7 | 0.94 | 0.85 | 0.79 | |
| 0.012 | 0.026 | 0.027 | 0.04 | 0.021 | 0.039 | 0.033 | 0.029 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zaery, M.; Wang, P.; Wang, W.; Xu, D. A Novel Optimal Power Allocation Control System with High Convergence Rate for DC Microgrids Cluster. Energies 2022, 15, 3994. https://doi.org/10.3390/en15113994
Zaery M, Wang P, Wang W, Xu D. A Novel Optimal Power Allocation Control System with High Convergence Rate for DC Microgrids Cluster. Energies. 2022; 15(11):3994. https://doi.org/10.3390/en15113994
Chicago/Turabian StyleZaery, Mohamed, Panbao Wang, Wei Wang, and Dianguo Xu. 2022. "A Novel Optimal Power Allocation Control System with High Convergence Rate for DC Microgrids Cluster" Energies 15, no. 11: 3994. https://doi.org/10.3390/en15113994
APA StyleZaery, M., Wang, P., Wang, W., & Xu, D. (2022). A Novel Optimal Power Allocation Control System with High Convergence Rate for DC Microgrids Cluster. Energies, 15(11), 3994. https://doi.org/10.3390/en15113994