
Real-Time Energy Management Strategy Based on Driving Conditions Using a Feature Fusion Extreme Learning Machine



Abstract
:1. Introduction
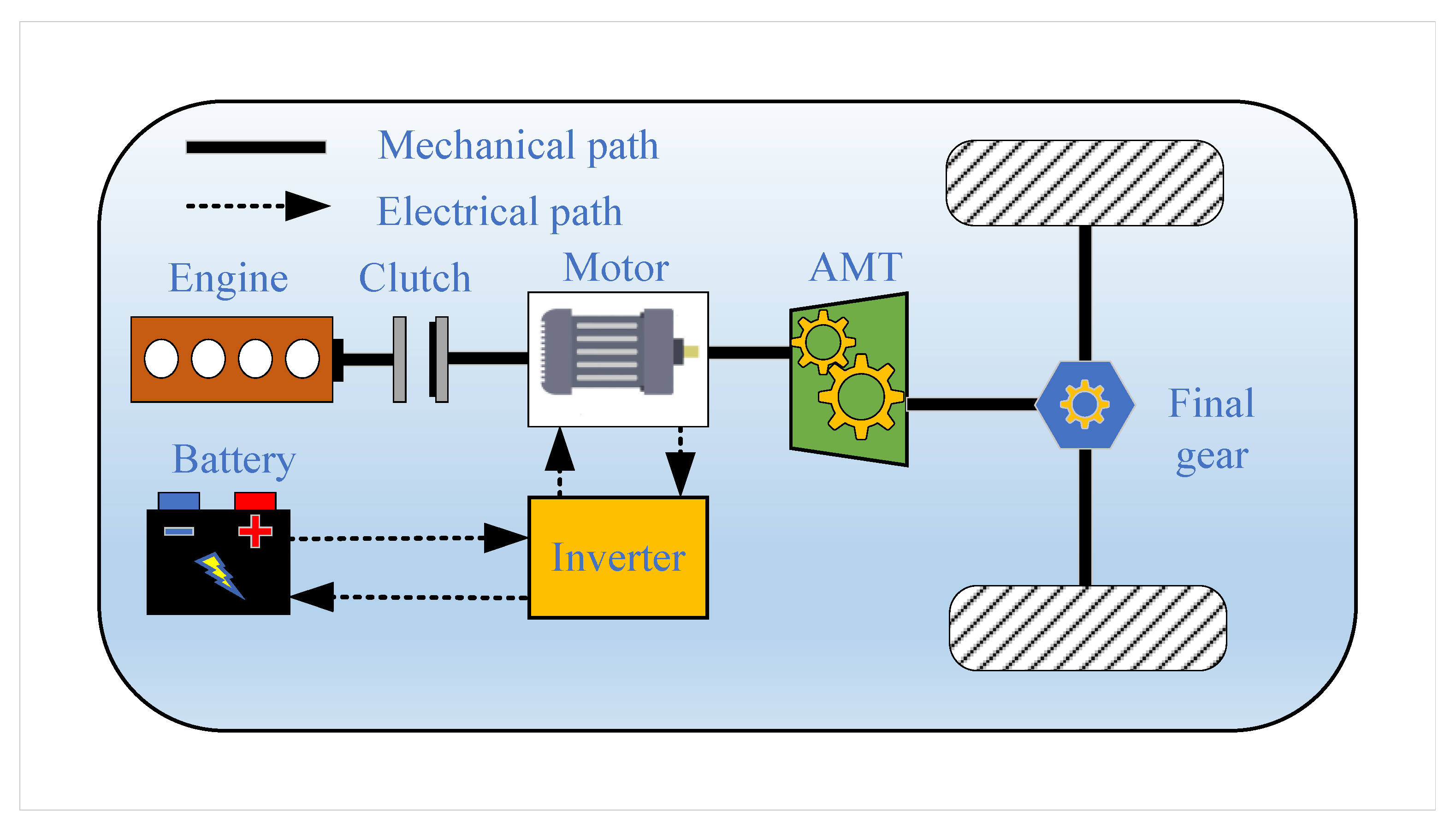
2. Hybrid Powertrain Model Descriptions
2.1. Vehicle Dynamics Model
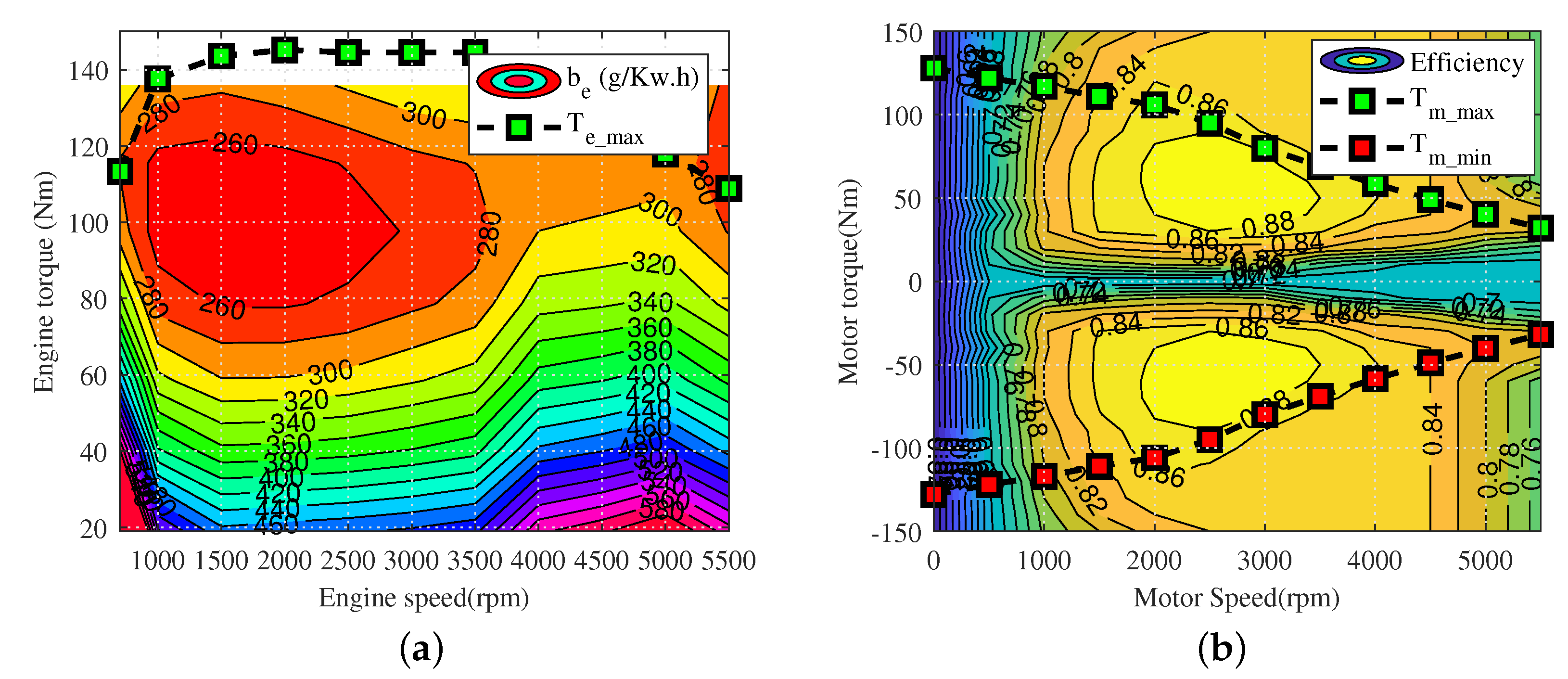
2.2. Power Source Model
2.3. Battery Model
3. Driving Pattern Recognition Based on FFELM
3.1. Selection of Typical Driving Cycles
3.2. Basic Extreme Learning Machine
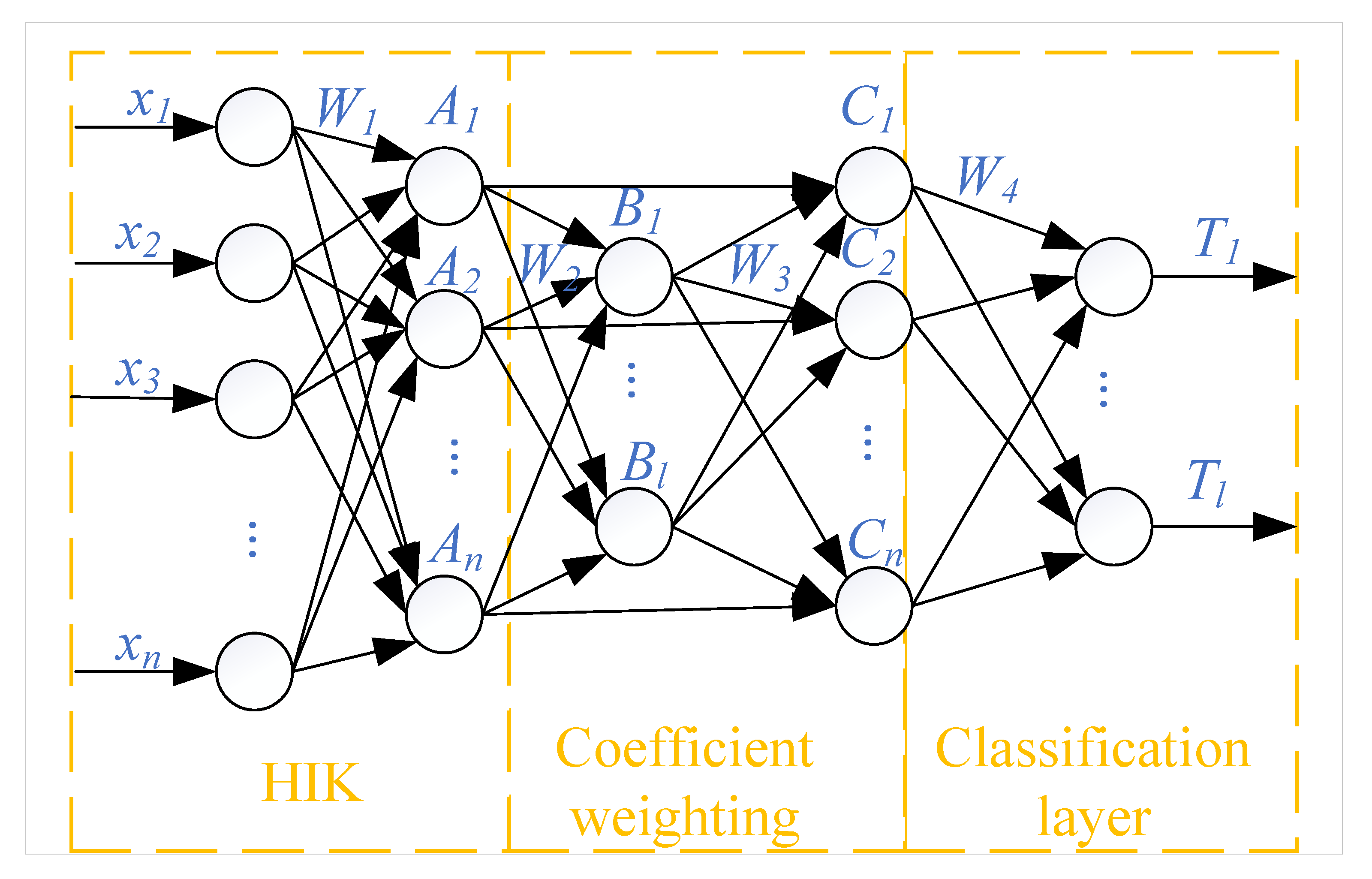
3.3. Feature Fusion Extreme Learning Machine FFELM)
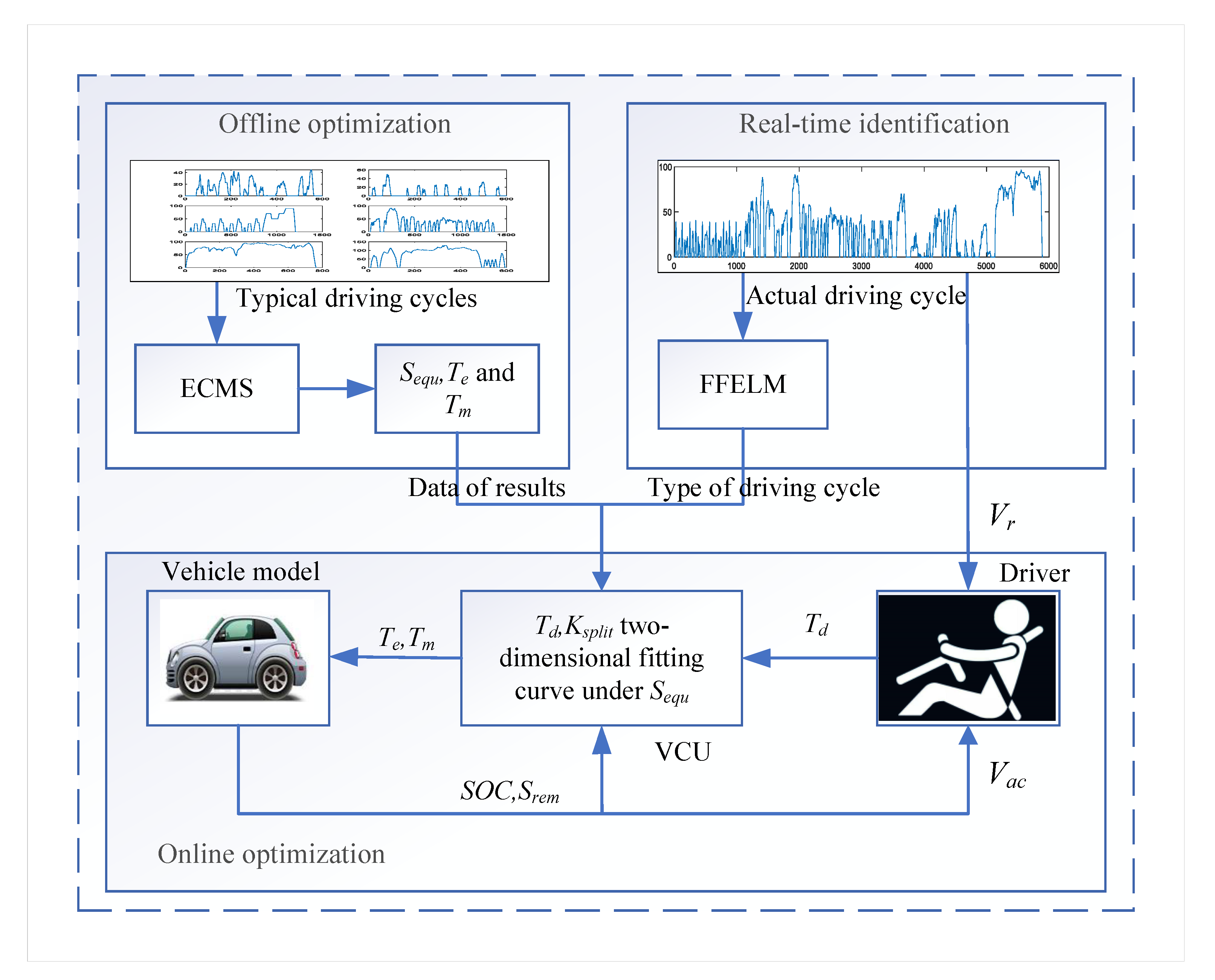
4. EMS Based on Driving Condition Identification
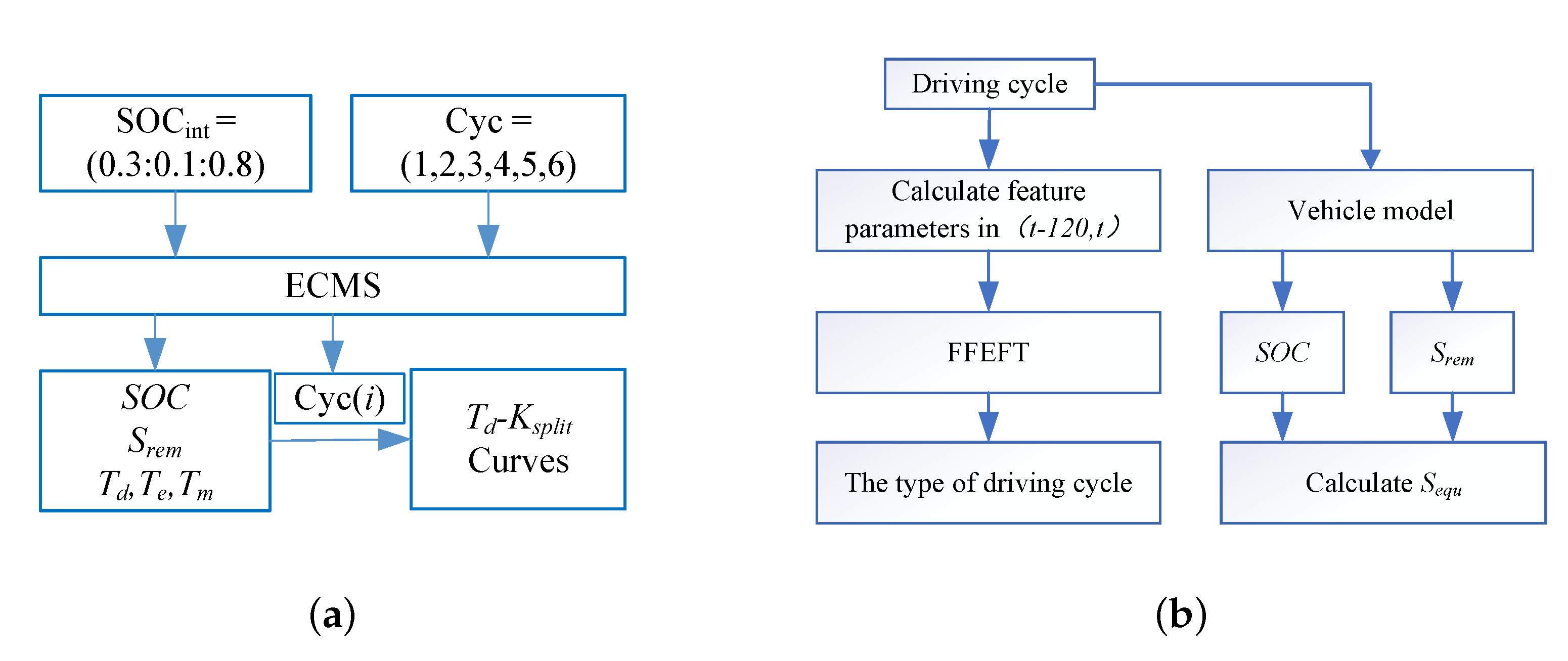
4.1. Offline EMS Optimization
4.1.1. Objective Function
4.1.2. Control and State Variables
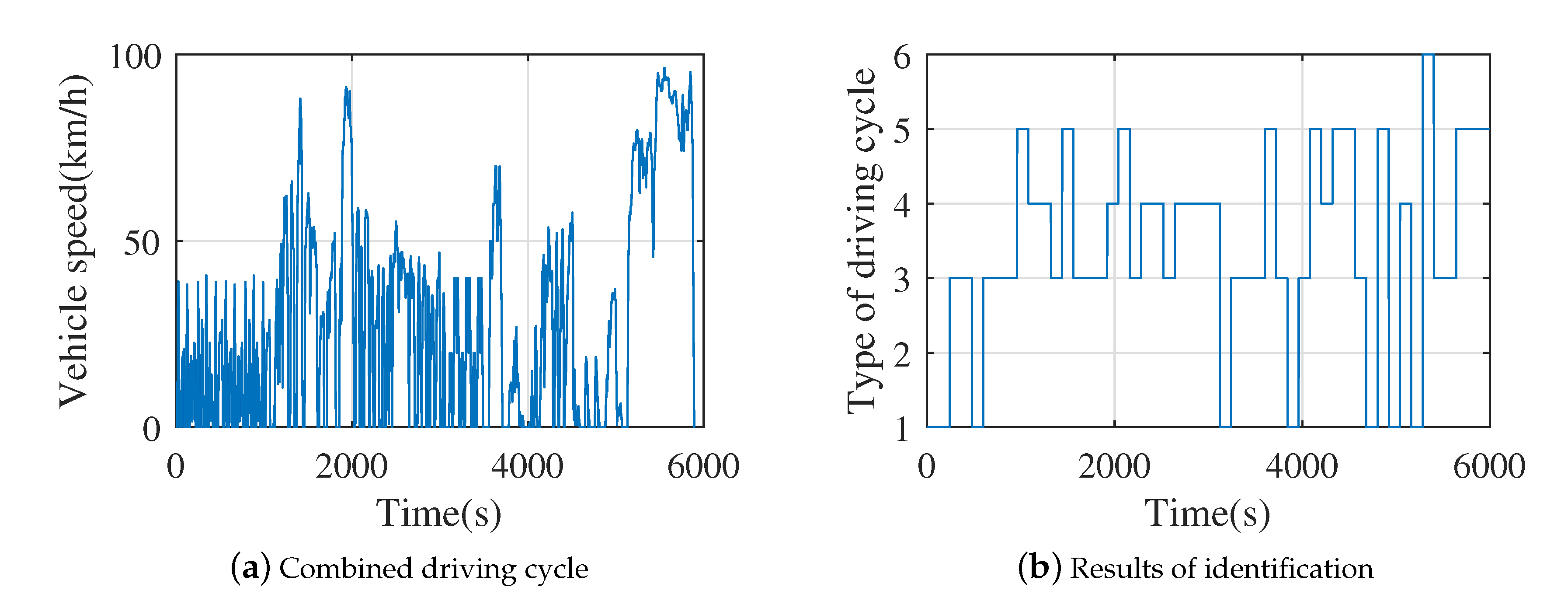
4.2. Real-Time Driving Condition Recognition and Calculation
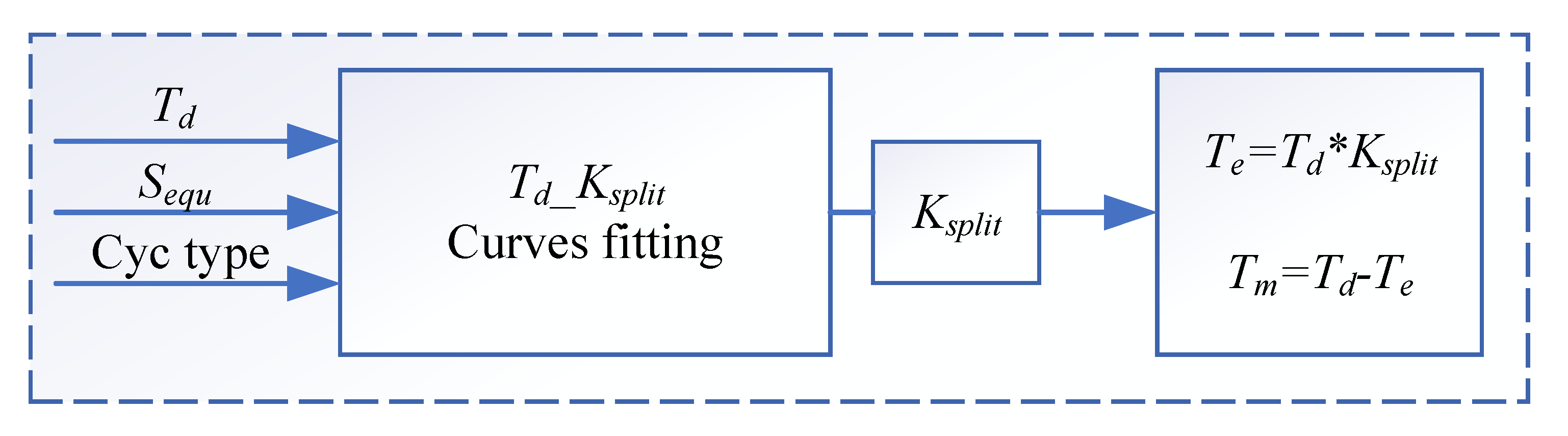
4.3. Online Strategy Optimization
5. Simulation Results and Discussion
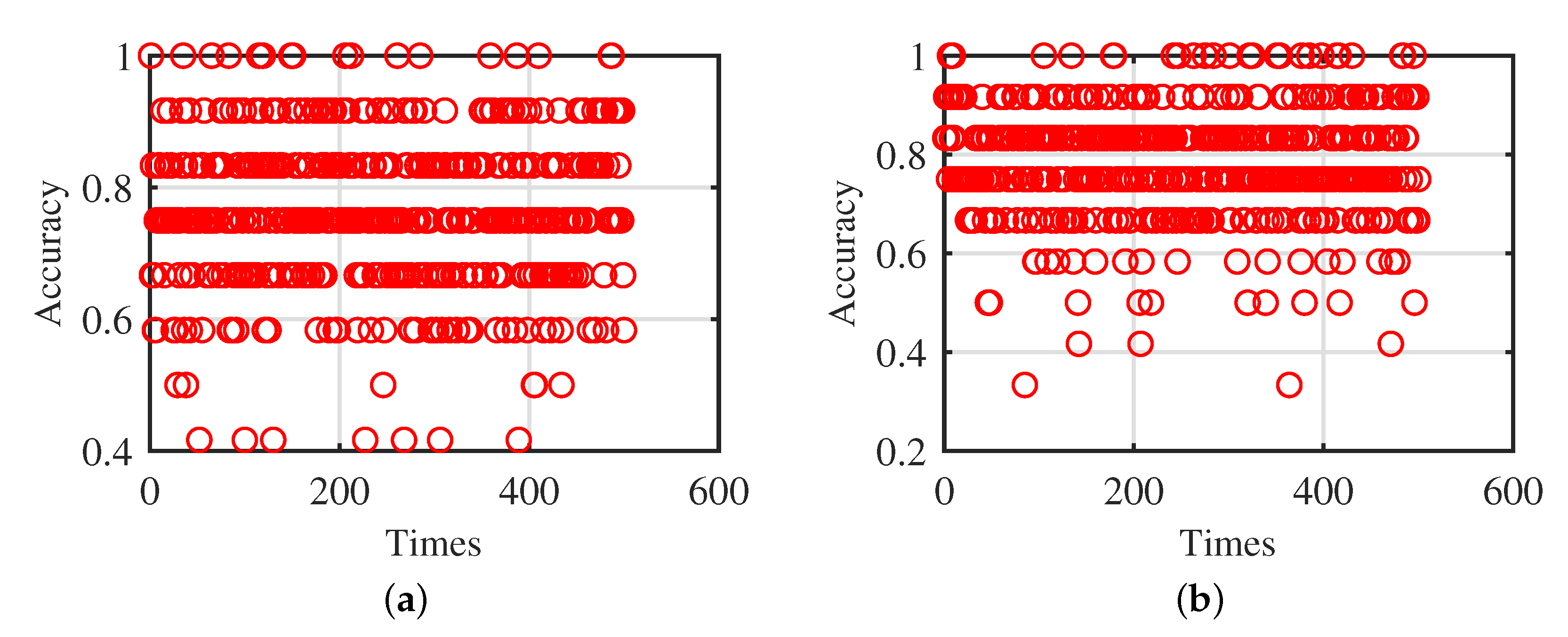
5.1. Results and Analysis of FFELM
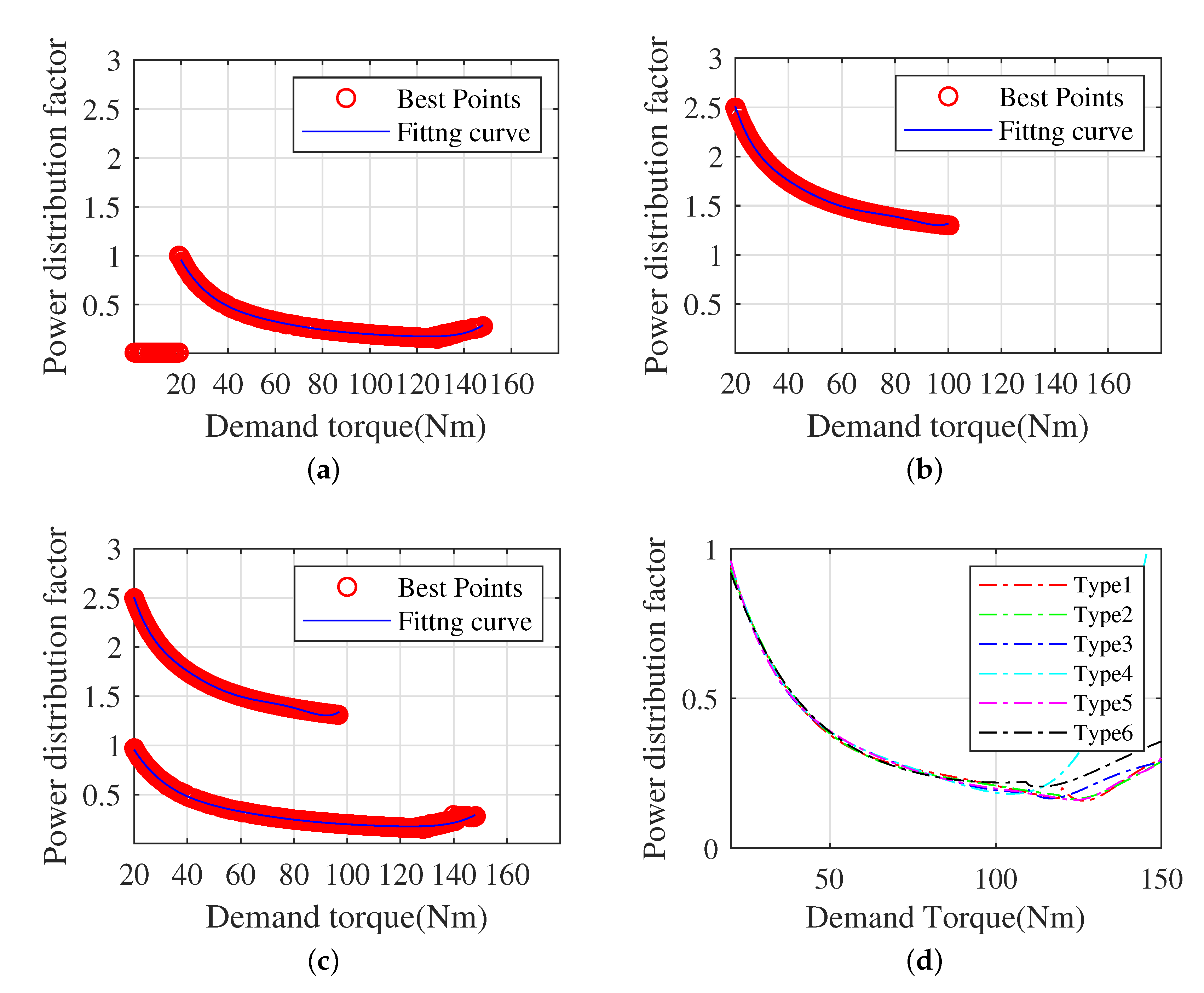
5.2. Results and Analysis of Offline Optimization
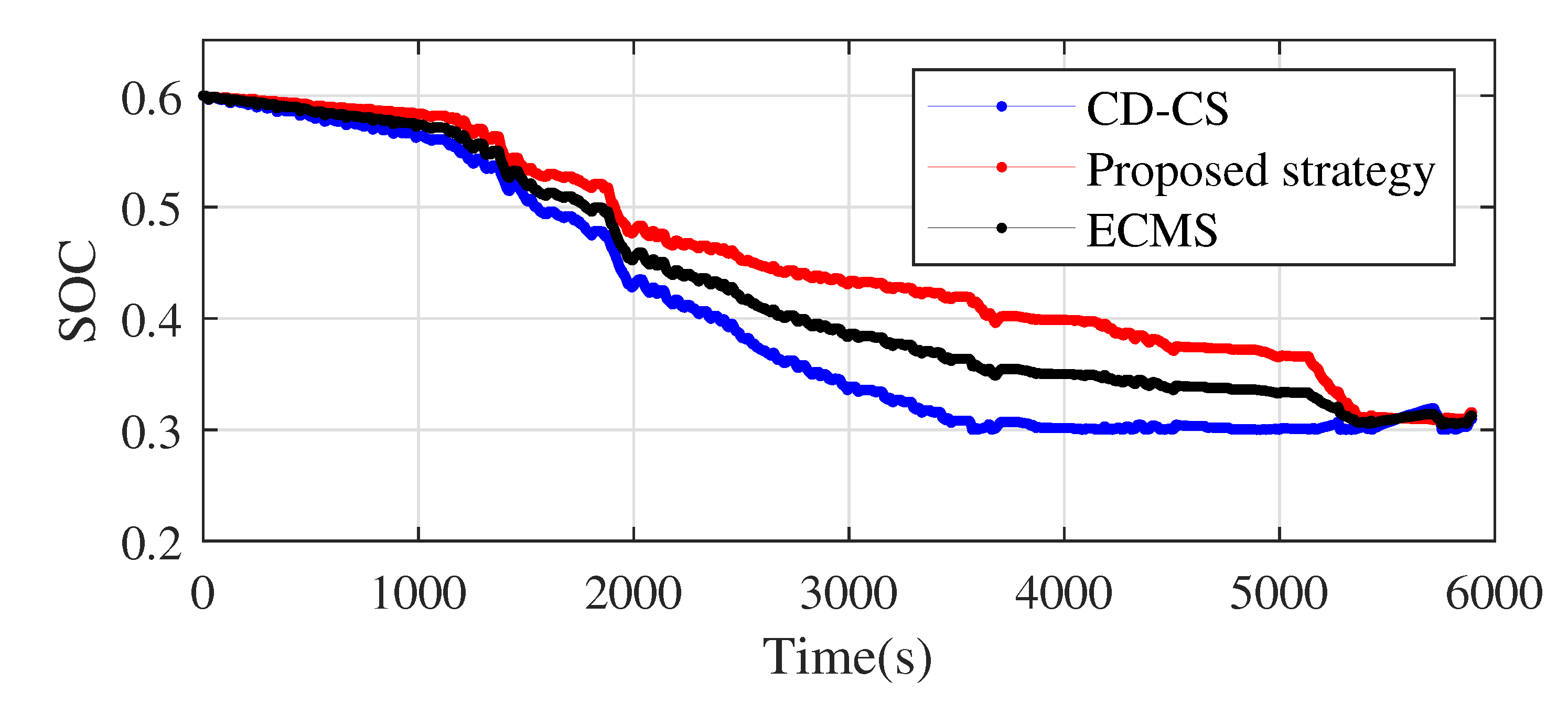
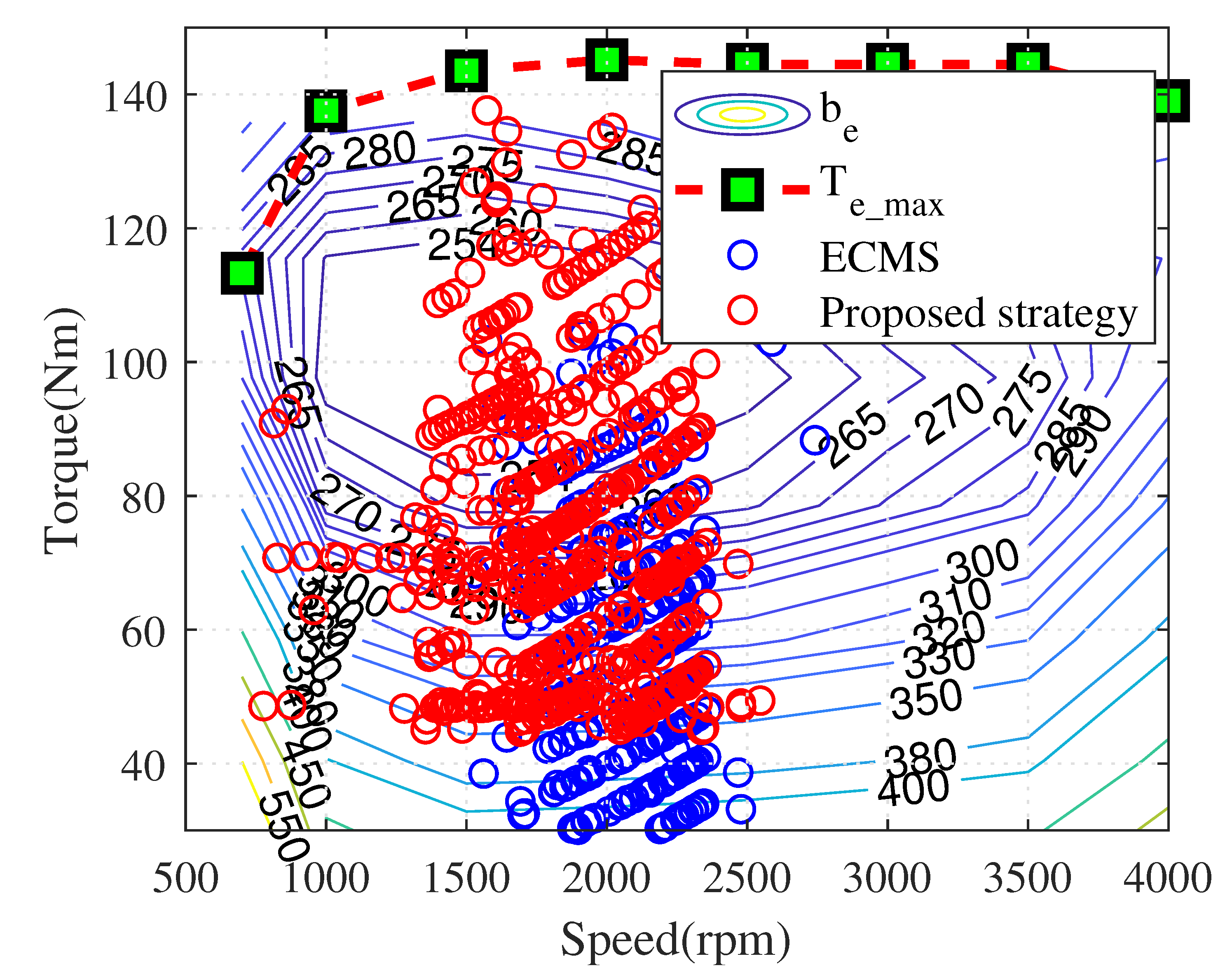
5.3. Results and Analysis under Different Strategies
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Sabri, M.F.M.; Danapalasingam, K.A.; Rahmat, M.F. A review on hybrid electric vehicles architecture and energy management strategies. Renew. Sustain. Energy Rev. 2016, 53, 1433–1442. [Google Scholar] [CrossRef]
- Liu, Y.; Gao, J.; Qin, D.; Zhang, Y.; Lei, Z. Rule-corrected energy management strategy for hybrid electric vehicles based on operation-mode prediction. J. Clean. Prod. 2018, 188, 796–806. [Google Scholar] [CrossRef]
- Chen, Z.; Liu, Y.; Ye, M.; Zhang, Y.; Li, G. A survey on key techniques and development perspectives of equivalent consumption minimisation strategy for hybrid electric vehicles. Renew. Sustain. Energy Rev. 2021, 151, 111607. [Google Scholar] [CrossRef]
- Shi, D.; Liu, S.; Cai, Y.; Wang, S.; Li, H.; Chen, L. Pontryagin’s minimum principle based fuzzy adaptive energy man-agement for hybrid electric vehicle using real-time traffic information. Appl. Energy 2021, 286, 116467. [Google Scholar] [CrossRef]
- Liu, Y.; Li, J.; Chen, Z.; Qin, D.; Zhang, Y. Research on a multi-objective hierarchical prediction energy management strategy for range extended fuel cell vehicles. J. Power Sources 2019, 429, 55–66. [Google Scholar] [CrossRef]
- He, X.; Wu, X. Eco-driving advisory strategies for a platoon of mixed gasoline and electric vehicles in a connected vehicle system. Transp. Res. Part Transp. Environ. 2018, 63, 907–922. [Google Scholar] [CrossRef]
- Peng, J.; He, H.; Xiong, R. Rule based energy management strategy for a series–parallel plug-in hybrid electric bus optimized by dynamic programming. Appl. Energy 2017, 185, 1633–1643. [Google Scholar] [CrossRef]
- Overington, S.; Rajakaruna, S. High-efficiency control of internal combustion engines in blended charge depletion/charge sustenance strategies for plug-in hybrid electric vehicles. IEEE-Trans-Actions Veh. Technol. 2014, 64, 48–61. [Google Scholar] [CrossRef]
- Son, H.; Kim, H.; Hwang, S.; Kim, H. Development of an advanced rule-based control strategy for a PHEV using machine learning. Energies 2018, 11, 89. [Google Scholar] [CrossRef] [Green Version]
- Chen, Z.; Gu, H.; Shen, S.; Shen, J. Energy management strategy for power-split plug-in hybrid electric vehicle based on MPC and double Q-learning. Energy 2022, 245, 123182. [Google Scholar] [CrossRef]
- Garcia, A.; Carlucci, P.; Monsalve-Serrano, J.; Valletta, A.; Martínez-Boggio, S. Energy management strategies comparison for a parallel full hybrid electric vehicle using Reactivity Controlled Compression Ignition combus-tion. Appl. Energy 2020, 272, 115191. [Google Scholar] [CrossRef]
- Wu, Y.; Ravey, A.; Chrenko, D.; Miraoui, A. Demand side energy management of EV charging stations by approximate dynamic programming. Energy Convers. Manag. 2019, 196, 878–890. [Google Scholar] [CrossRef] [Green Version]
- Liu, J.; Chen, Y.; Li, W.; Shang, F.; Zhan, J. Hybrid-Trip-Model-Based Energy Management of a PHEV With Computation-Optimized Dynamic Programming. IEEE Trans. Veh. Technol. 2018, 67, 338–353. [Google Scholar] [CrossRef]
- Xie, S.; Hu, X.; Xin, Z.; Brighton, J. Pontryagin’s minimum principle based model predictive control of energy management for a plug-in hybrid electric bus. Appl. Energy 2019, 236, 893–905. [Google Scholar] [CrossRef] [Green Version]
- Sánchez, M.; Delprat, S.; Hofman, T. Energy management of hybrid vehicles with state constraints: A penalty and implicit Hamiltonian minimization approach. Appl. Energy 2020, 260, 114149. [Google Scholar] [CrossRef]
- Shangguan, J.; Guo, H.; Yue, M. Robust energy management of plug-in hybrid electric bus con-sidering the uncertainties of driving cycles and vehicle mass. Energy 2020, 203, 117836. [Google Scholar] [CrossRef]
- L.ü, X.; Wu, Y.; Lian, J.; Zhang, Y.; Chen, C.; Wang, P.; Meng, L. Energy management of hybrid electric vehicles: A review of energy optimization of fuel cell hybrid power system based on genetic algorithm. Energy Convers. Manag. 2020, 205, 112474. [Google Scholar] [CrossRef]
- Hemi, H.; Ghouili, J.; Cheriti, A. A real time energy management for electrical vehicle using combination of rule-based and ECMS. IEEE Electr. Power Energy Conf. 2013, 2013, 1–6. [Google Scholar]
- Li, H.; Ravey, A.; N’Diaye, A.; Djerdir, A. Online adaptive equivalent consumption minimization strategy for fuel cell hybrid electric vehicle considering power sources degradation. Energy Convers. Manag. 2019, 192, 133–149. [Google Scholar] [CrossRef]
- Choi, K.; Byun, J.; Lee, S.; Jang, I.G. Adaptive Equivalent Consumption Minimization Strategy (A-ECMS) for the HEVs with a Near-Optimal Equivalent Factor Considering Driving Conditions. IEEE Trans. Veh. Technol. 2021, 71, 2538–2549. [Google Scholar] [CrossRef]
- Gao, J.P.; Zhu, G.M.G.; Strangas, E.G.; Sun, F.C. Equivalent fuel consumption optimal control of a series hybrid electric vehicle. Proc. Inst. Mech. Eng. Part J. Automob. Eng. 2009, 223, 1003–1018. [Google Scholar] [CrossRef]
- Sinoquet, D.; Rousseau, G.; Milhau, Y. Design optimization and optimal control for hybrid ve-hicles. Optim. Eng. 2011, 12, 199–213. [Google Scholar] [CrossRef] [Green Version]
- Marano, V.; Tulpule, P.; Stockar, S.; Onori, S.; Rizzoni, G. Comparative study of different control strategies for plug-in hybrid electric vehicles. In Proceedings of the 9th International Conference on Engines and Vehicles, Naples, Italy, 13 September 2009. [Google Scholar]
- He, H.; Sun, C.; Zhang, X. A method for identification of driving patterns in hybrid electric vehicles based on a LVQ neural network. Appl. Energy 2012, 5, 3363–3380. [Google Scholar] [CrossRef]
- Song, K.; Li, F.; Hu, X.; He, L.; Niu, W.; Lu, S.; Zhang, T. Multi-mode energy management strategy for fuel cell electric vehicles based on driving pattern identification using learning vector quantization neural network algorithm. J. Power Sources 2018, 389, 230–239. [Google Scholar] [CrossRef]
- Chen, Z.; Li, L.; Yan, B.; Yang, C.; Martínez, C.M.; Cao, D. Multimode energy management for plug-in hybrid electric buses based on driving cycles prediction. IEEE Trans. Intell. Transp. Syst. 2016, 17, 2811–2821. [Google Scholar] [CrossRef]
- Denis, N.; Dubois, M.R.; Dubé, R.; Desrochers, A. Blended power management strategy using pattern recognition for a plug-in hybrid electric vehicle. Int. J. Intell.-Transp. Syst. Res. 2016, 14, 101–114. [Google Scholar] [CrossRef]
- Wei, C.; Chen, Y.; Li, X.; Lin, X. Integrating intelligent driving pattern recognition with adaptive energy management strategy for extender range electric logistics vehicle. Energy 2022, 247, 123478. [Google Scholar] [CrossRef]
- Qiang, P.; Wu, P.; Pan, T.; Zang, H. Real-Time Approximate Equivalent Consumption Minimization Strategy Based on the Single-Shaft Parallel Hybrid Powertrain. Energies 2021, 14, 7919. [Google Scholar] [CrossRef]
- Tian, X.; He, R.; Sun, X.; Cai, Y.; Xu, Y. An ANFIS-based ECMS for energy optimization of parallel hybrid electric bus. IEEE Trans. Veh. Technol. 2019, 69, 1473–1483. [Google Scholar] [CrossRef]
- Huang, G.B.; Zhu, Q.Y.; Siew, C.K. Extreme learning machine: Theory and applications. Neurocomputing 2006, 70, 489–501. [Google Scholar] [CrossRef]
- Huang, G.B.; Zhou, H.; Ding, X.; Zhang, R. Extreme learning machine for regression and multiclass classification. IEEE Trans. Syst. Man, Cybern. Part (Cybern.) 2011, 42, 513–529. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Kasun, L.L.C.; Zhou, H.; Huang, G.B.; Vong, C.M. Representational learning with ELMs for big data. IEEE Intell. Syst. 2013, 28, 31–34. [Google Scholar]
- Aziz, S.; Youssef, F. Traffic sign recognition based on multi-feature fusion and ELM classifier. Procedia Comput. Sci. 2018, 127, 146–153. [Google Scholar] [CrossRef]
- Chen, S.Y.; Wu, C.H.; Hung, Y.H.; Chung, C.T. Optimal strategies of energy management integrated with transmission control for a hybrid electric vehicle using dynamic particle swarm optimization. Energy 2018, 160, 154–170. [Google Scholar] [CrossRef]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Component | Parameters | Value |
|---|---|---|
| Engine | Engine type | 1.9L.SI |
| Maximum Power | 63 kW @ 5500 rpm. | |
| Peak Torque | 145 Nm @ 2000 rpm. | |
| Motor | Motor type | Permanent magnet motor |
| Maximum power | 25 kW | |
| Battery | Battery type | Lithium–ion |
| Capacity | 25 Ah | |
| Five-speed AMT | Gear ratios | 3.25/1.81/1.21/0.86/0.64 |
| Final gear | Gear ratio | 4.06 |
| Vehicle | Vehicle mass | 1350 kg |
| Radius of tire | 0.282 m | |
| Vehicle front area | 2 m | |
| Rolling resistance coefficient | 0.014 | |
| Aerodynamic drag coefficient | 0.335 |
| Urban | Suburban | High-Speed | ||||
|---|---|---|---|---|---|---|
| Feature parameters | NYCC (Type1) | NewYork Bus (Type2) | ECE_EUDC_ LOW (Type3) | UDDS (Type4) | HWFET (Type5) | US06 (Type6) |
| 11.41 | 5.93 | 32.19 | 31.5 | 77.58 | 97.19 | |
| 44.58 | 45.97 | 90 | 91.3 | 96.4 | 129.5 | |
| 2.68 | 2.77 | 1.06 | 1.48 | 1.43 | 3.08 | |
| 0.62 | 1.17 | 0.58 | 0.5 | 0.19 | 0.34 | |
| −2.64 | −2.06 | −1.39 | −1.5 | −1.48 | −3.08 | |
| −0.64 | −0.68 | −0.79 | −0.6 | −0.22 | −0.4 | |
| 0.351 | 0.672 | 0.251 | 0.19 | 0.008 | 0.033 | |
| 0.326 | 0.127 | 0.203 | 0.4 | 0.441 | 0.483 | |
| 0.304 | 0.201 | 0.136 | 0.33 | 0.386 | 0.398 | |
| 0.02 | 0 | 0.411 | 0.08 | 0.165 | 0.084 | |
| 18 | 11 | 13 | 17 | 1 | 1 | |
| Component Number | Eigenvalues | The Contribution Rate | The Contribution Accumulative Rate |
|---|---|---|---|
| 1 | 5.208 | 47.34% | 47.34% |
| 2 | 2.538 | 23.07% | 70.41% |
| 3 | 0.882 | 8.01% | 78.42% |
| 4 | 0.696 | 6.33% | 84.75% |
| 5 | 0.633 | 5.76% | 90.51% |
| 6 | 0.466 | 4.24% | 94.75% |
| 7 | 0.287 | 2.61% | 97.36% |
| 8 | 0.194 | 1.76% | 99.12% |
| 9 | 0.077 | 0.69% | 99.81% |
| 10 | 0.020 | 0.18% | 99.99% |
| 11 | 0.003 | 0.01% | 100.00% |
| Component | First Principal Component | Second Principal Component |
|---|---|---|
| 0.92 | 0.11 | |
| −0.92 | −0.11 | |
| −0.90 | −0.24 | |
| 0.83 | 0.17 | |
| 0.75 | 0.21 | |
| −0.66 | 0.56 | |
| −0.46 | 0.17 | |
| 0.40 | −0.83 | |
| 0.35 | 0.76 | |
| 0.51 | −0.67 | |
| 0.53 | −0.62 |
| Identification Algorithm | Recognition Result | Accuracy |
|---|---|---|
| Raw testdata | 5 5 2 4 4 4 3 4 1 4 2 3 | - |
| LVQ | 5 5 2 4 3 4 3 4 4 3 1 6 | 58.33% |
| SVM | 5 5 2 4 3 4 3 4 4 1 2 6 | 66.67% |
| ELM | 5 5 2 4 3 4 3 4 1 3 1 6 | 66.67% |
| FFELM | 5 5 2 4 3 4 3 4 1 3 2 6 | 75.00% |
| Strategy | Equivalent Fuel Consumption (L/km) | Improvement % |
|---|---|---|
| The proposed strategy | 7.12 | 10.21 |
| ECMS | 7.31 | 8.96 |
| CD-CS | 8.03 | - |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Qiang, P.; Wu, P.; Pan, T.; Zang, H. Real-Time Energy Management Strategy Based on Driving Conditions Using a Feature Fusion Extreme Learning Machine. Energies 2022, 15, 4353. https://doi.org/10.3390/en15124353
Qiang P, Wu P, Pan T, Zang H. Real-Time Energy Management Strategy Based on Driving Conditions Using a Feature Fusion Extreme Learning Machine. Energies. 2022; 15(12):4353. https://doi.org/10.3390/en15124353
Chicago/Turabian StyleQiang, Penghui, Peng Wu, Tao Pan, and Huaiquan Zang. 2022. "Real-Time Energy Management Strategy Based on Driving Conditions Using a Feature Fusion Extreme Learning Machine" Energies 15, no. 12: 4353. https://doi.org/10.3390/en15124353
APA StyleQiang, P., Wu, P., Pan, T., & Zang, H. (2022). Real-Time Energy Management Strategy Based on Driving Conditions Using a Feature Fusion Extreme Learning Machine. Energies, 15(12), 4353. https://doi.org/10.3390/en15124353