
Augmentation of DFIG and PMSG Wind Turbines Transient Performance Using Different Fault Current Limiters


Abstract
:1. Introduction
2. Modelling and Control
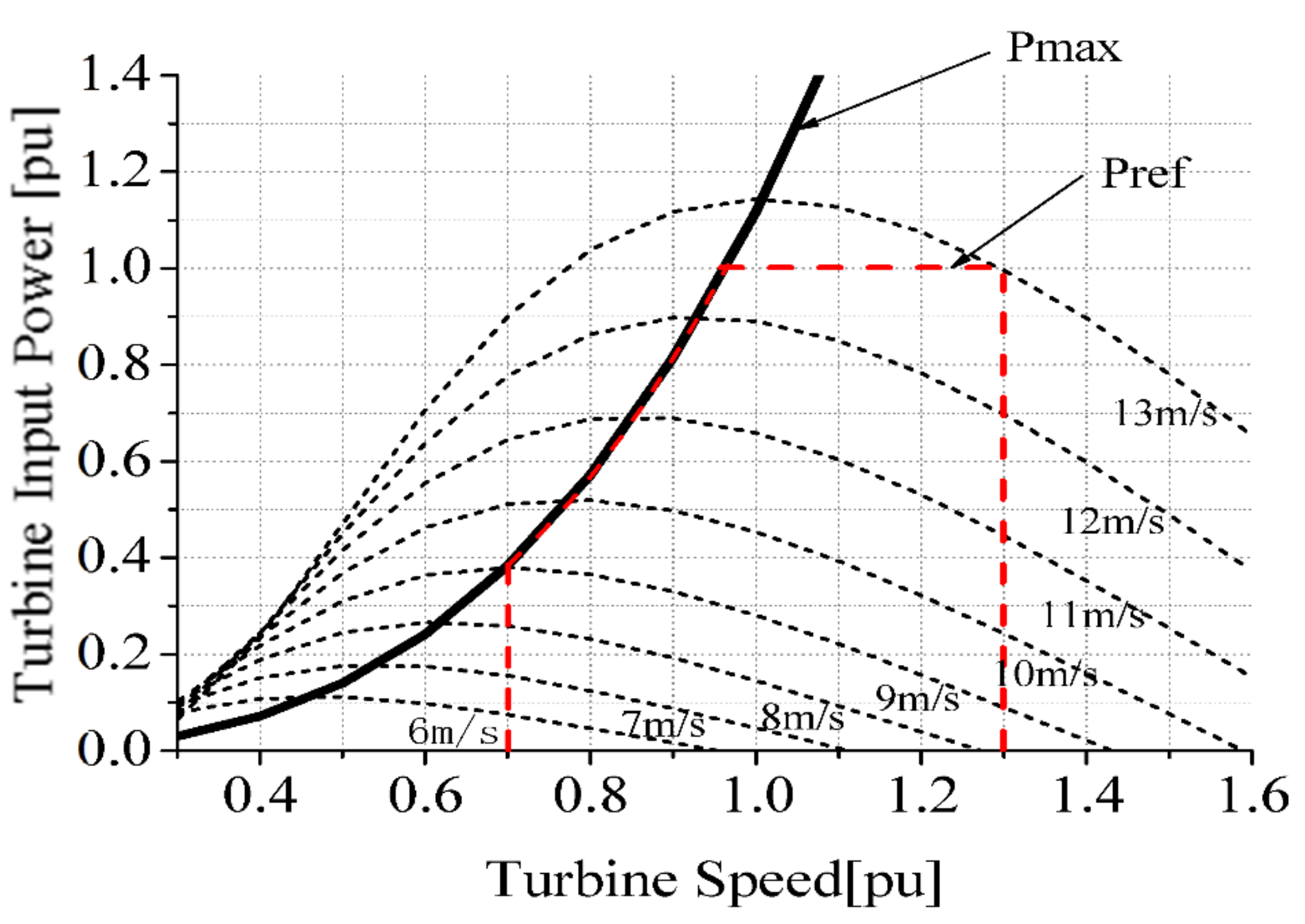
2.1. Wind Turbine Characteristics
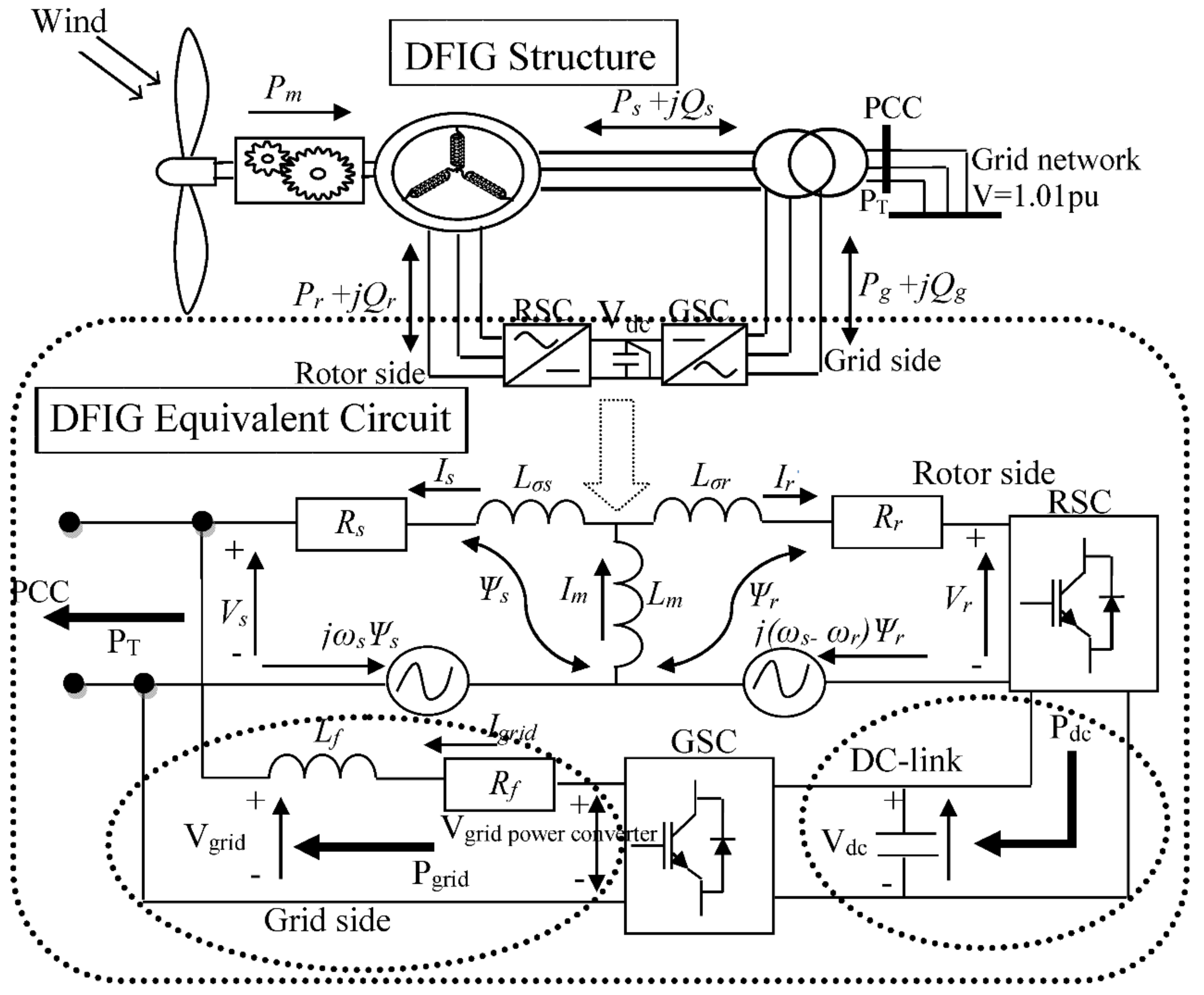
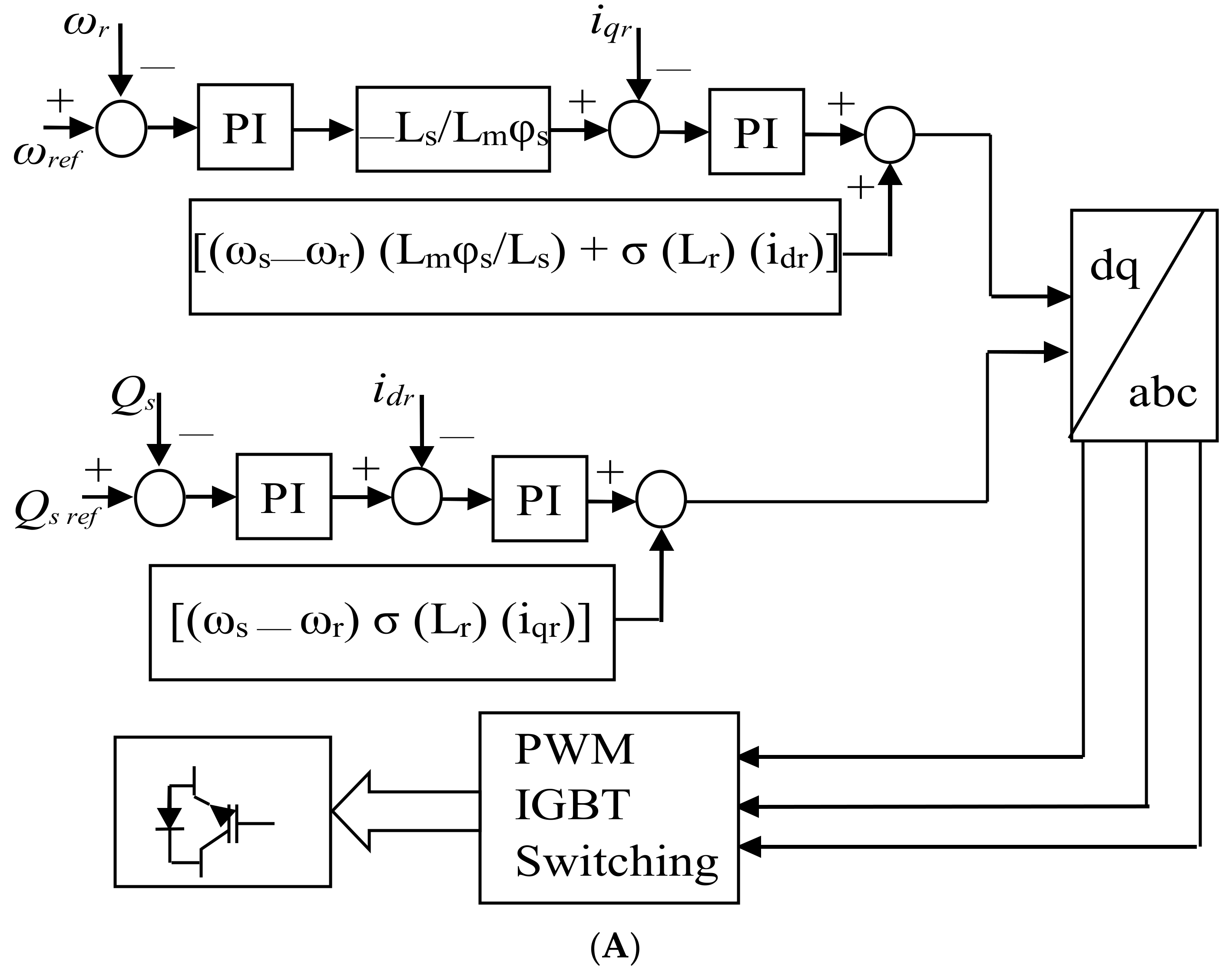
2.2. DFIG Model and Control
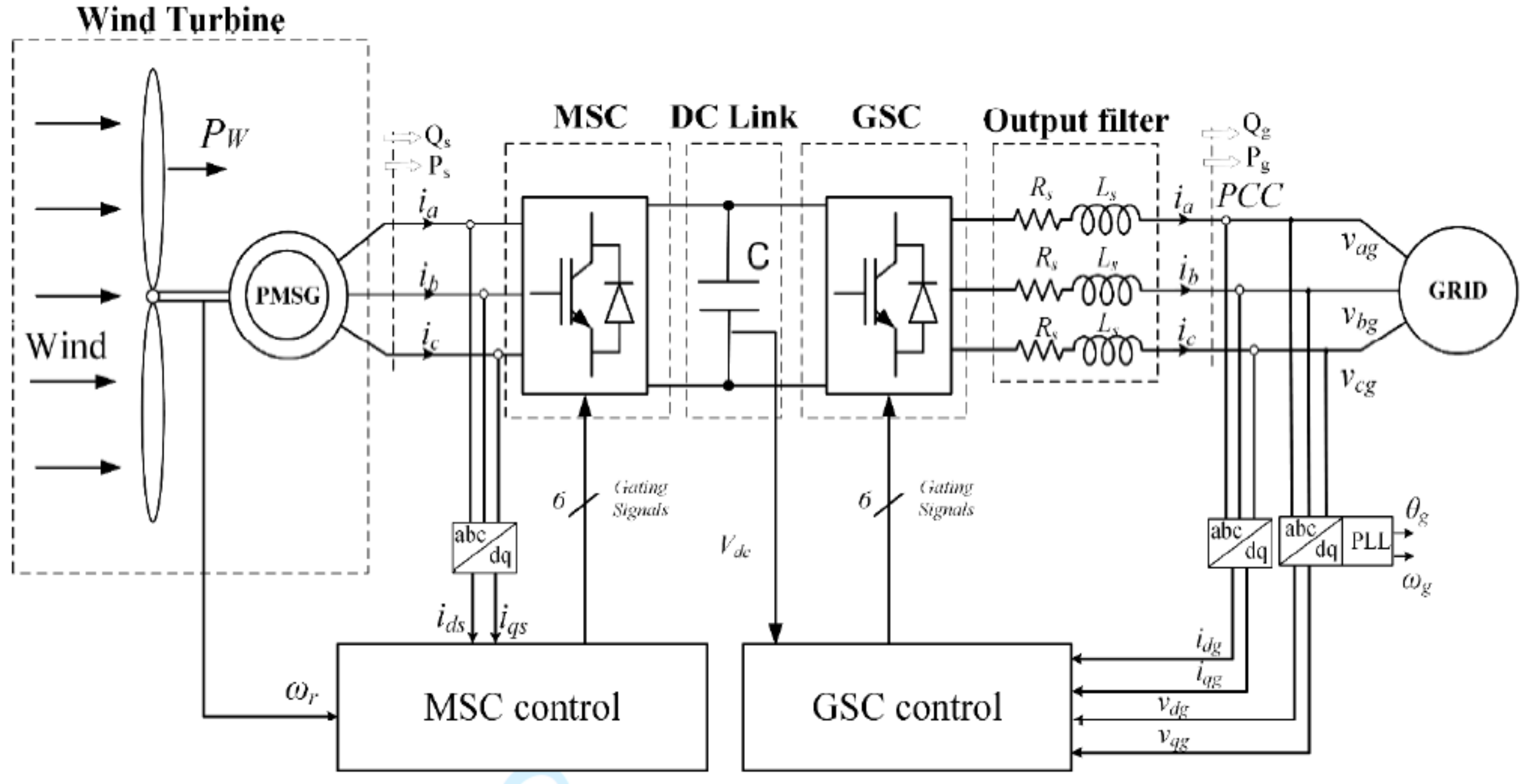
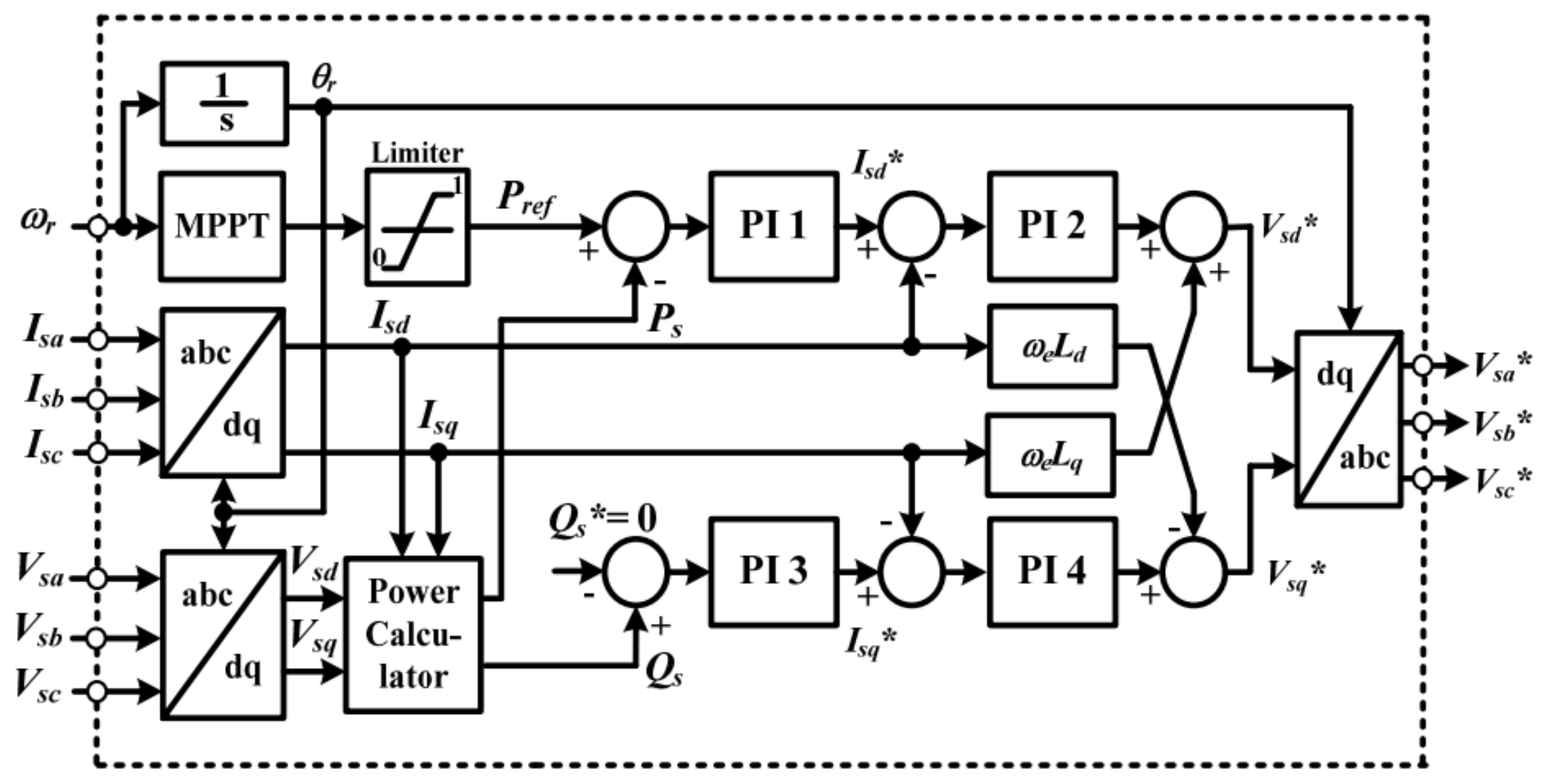
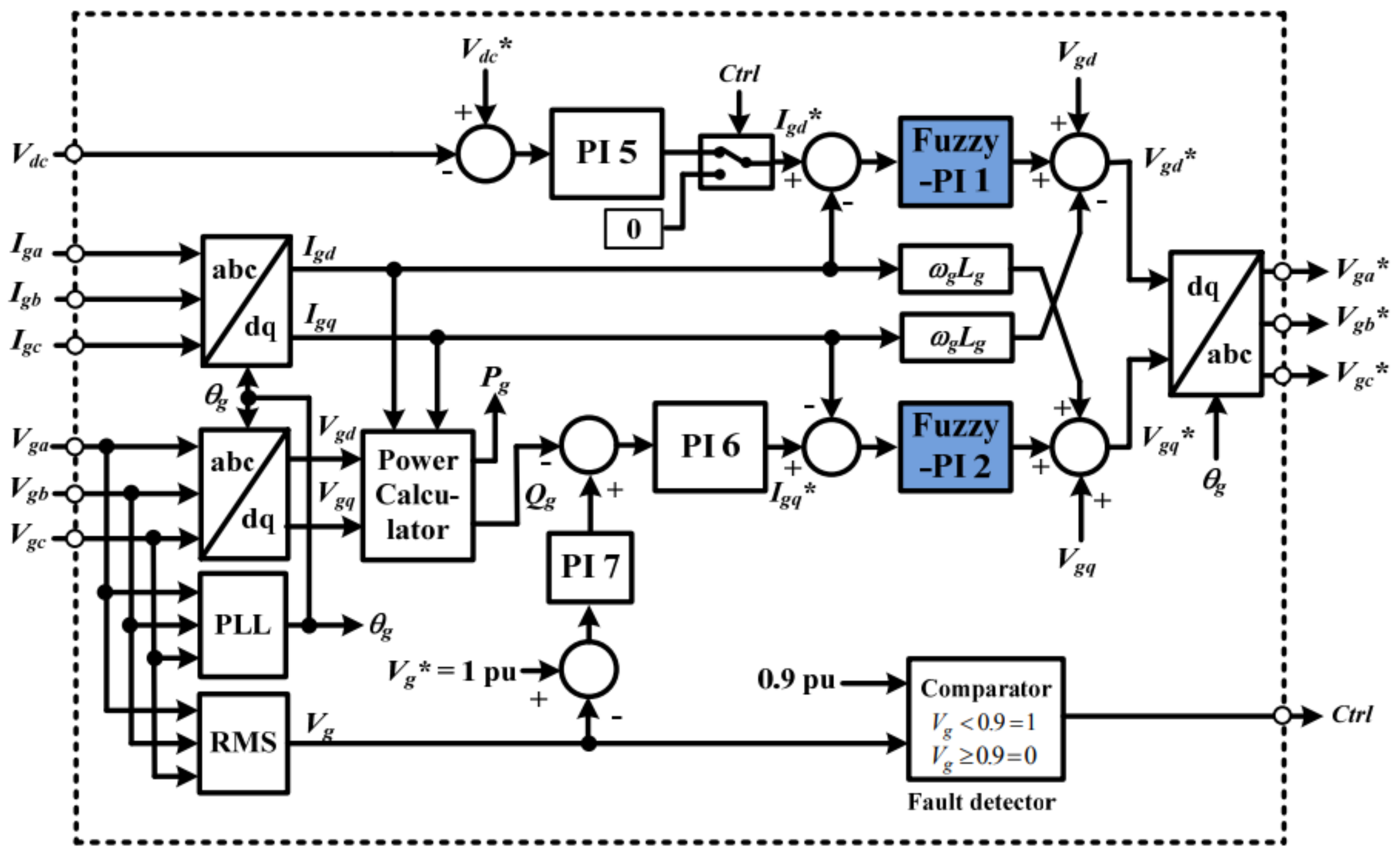
2.3. PMSG Model and Control
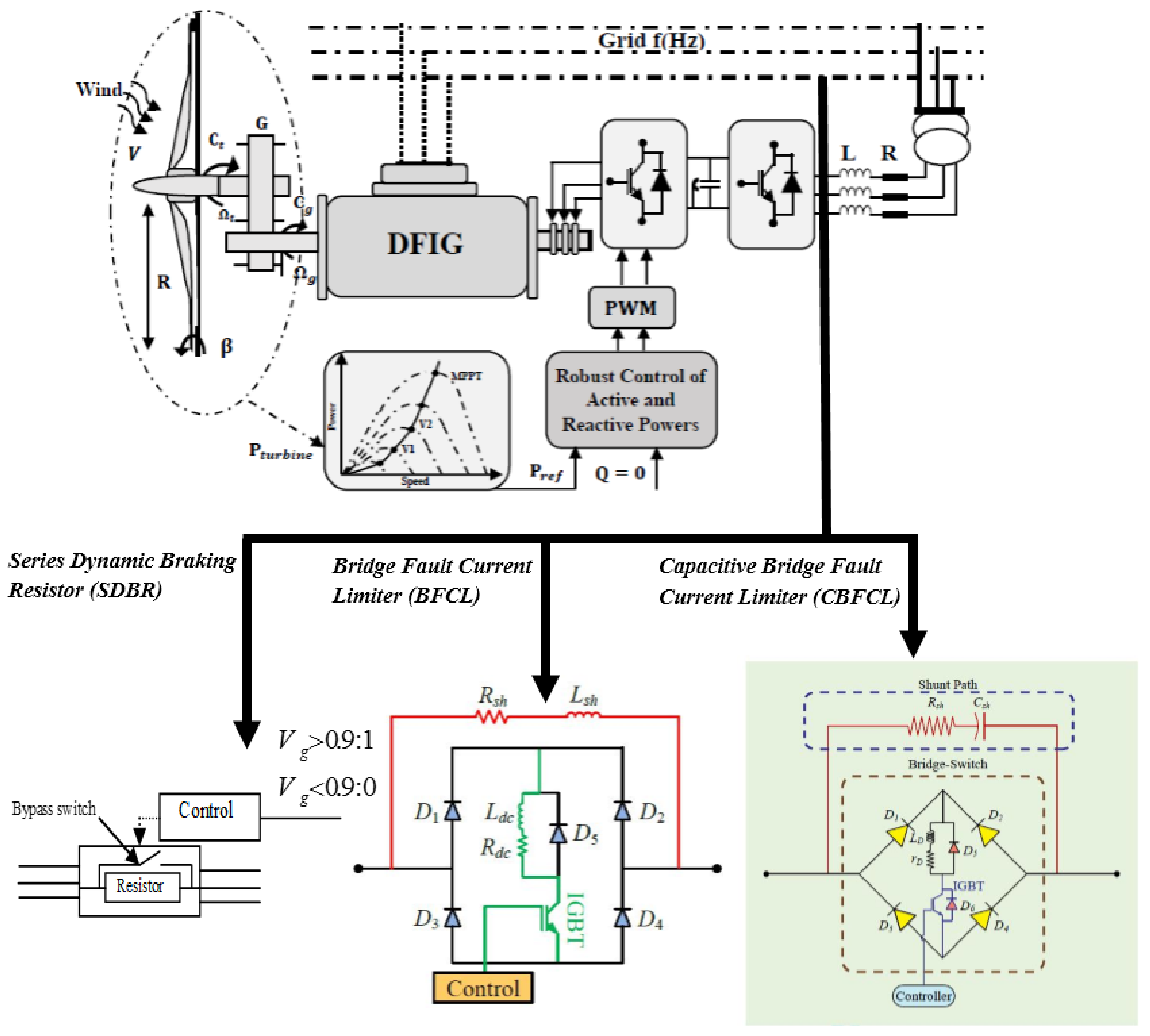
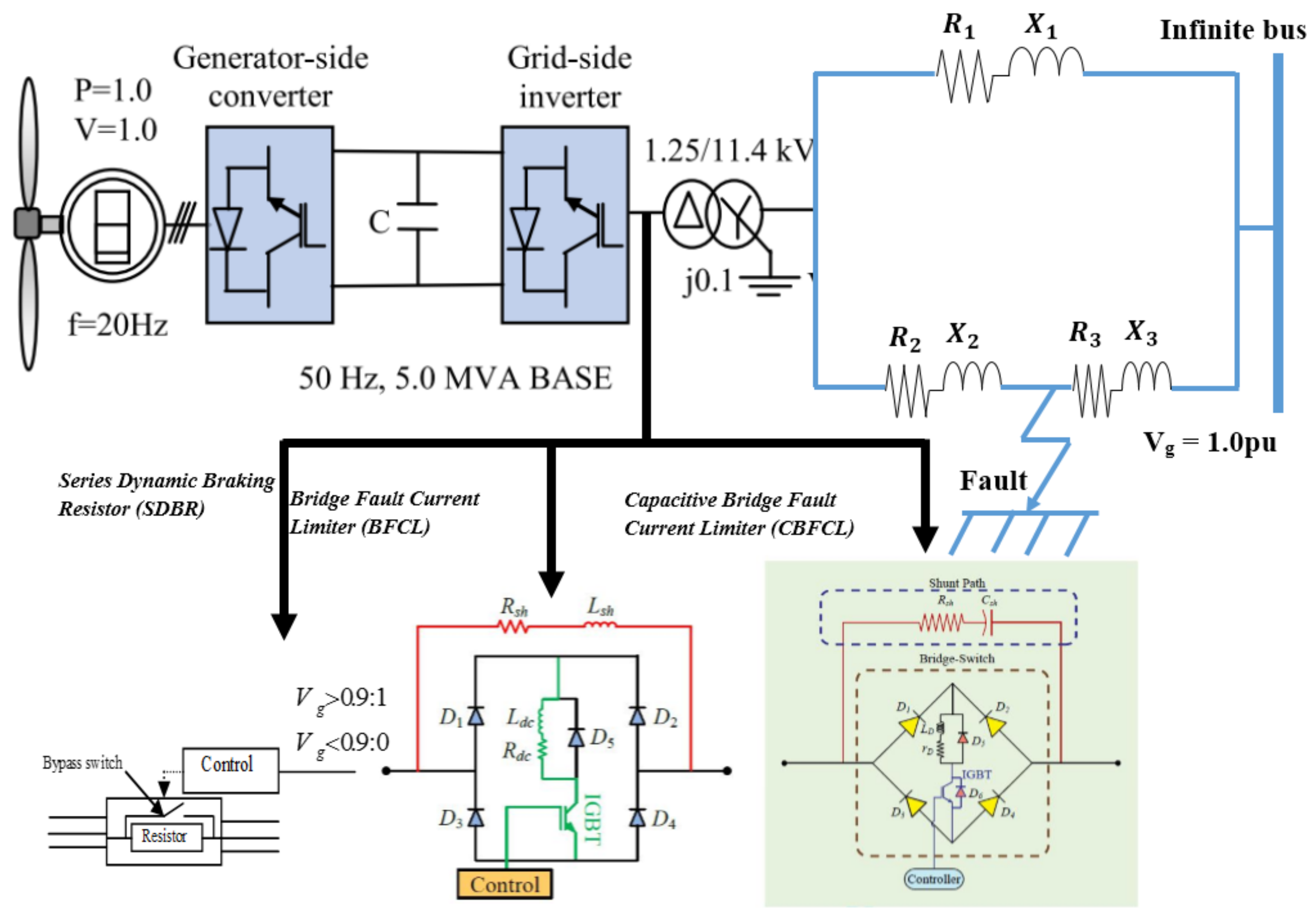
3. DFIG and PMSG Model Systems with the Fault Current Limiters
4. Mathematical Dynamics of SDBR in DFIG and PMSG Wind Turbines
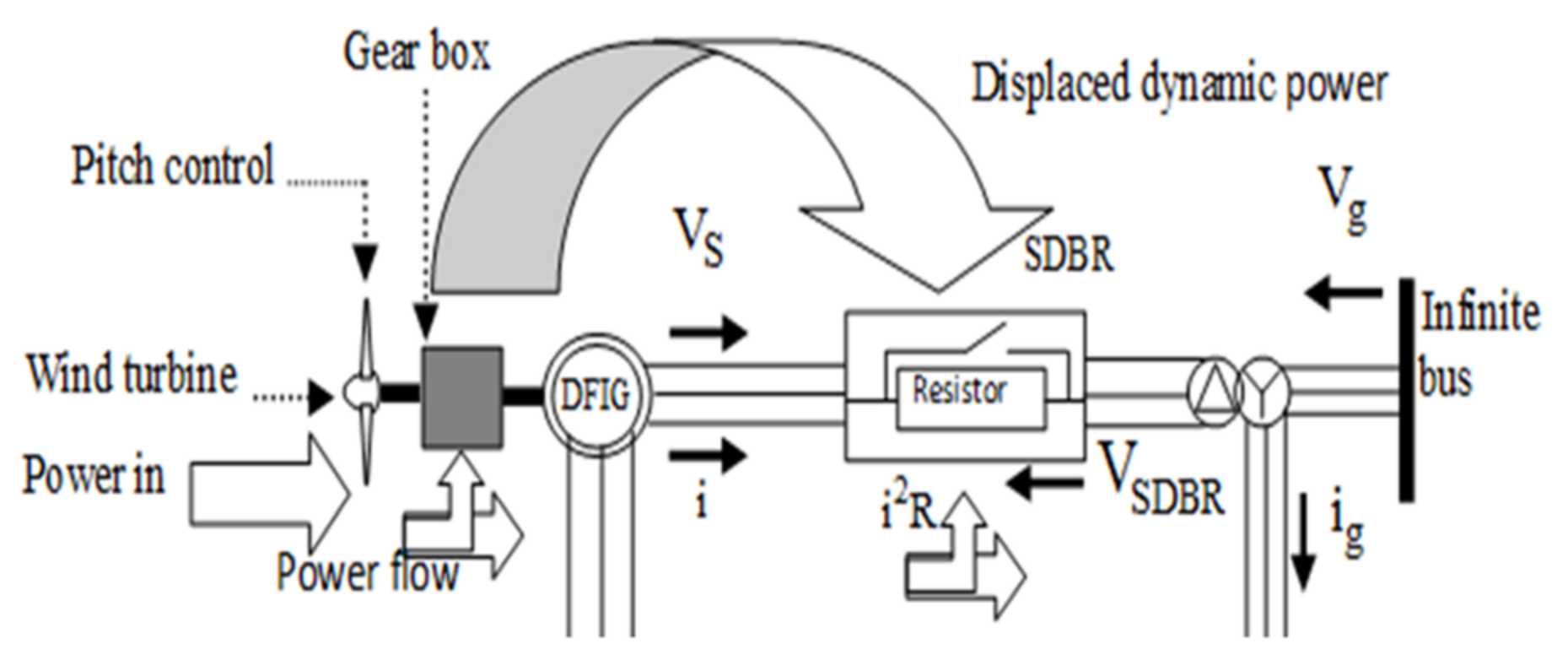
4.1. SDBR in DFIG Wind Turbines
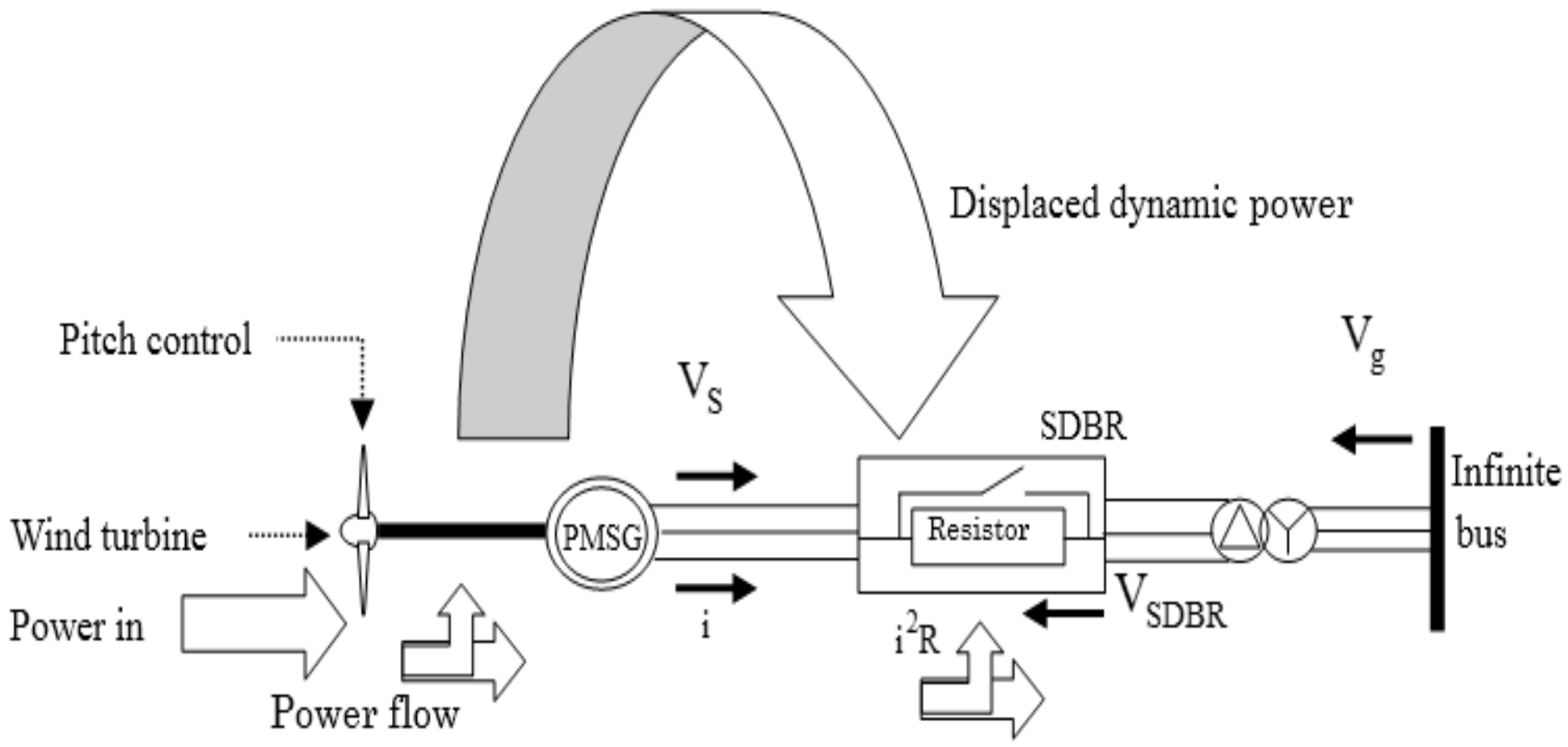
4.2. SDBR in PMSG Wind Turbines
5. Dynamics of BFCL and CBFL on DFIG and PMSG Wind Turbines
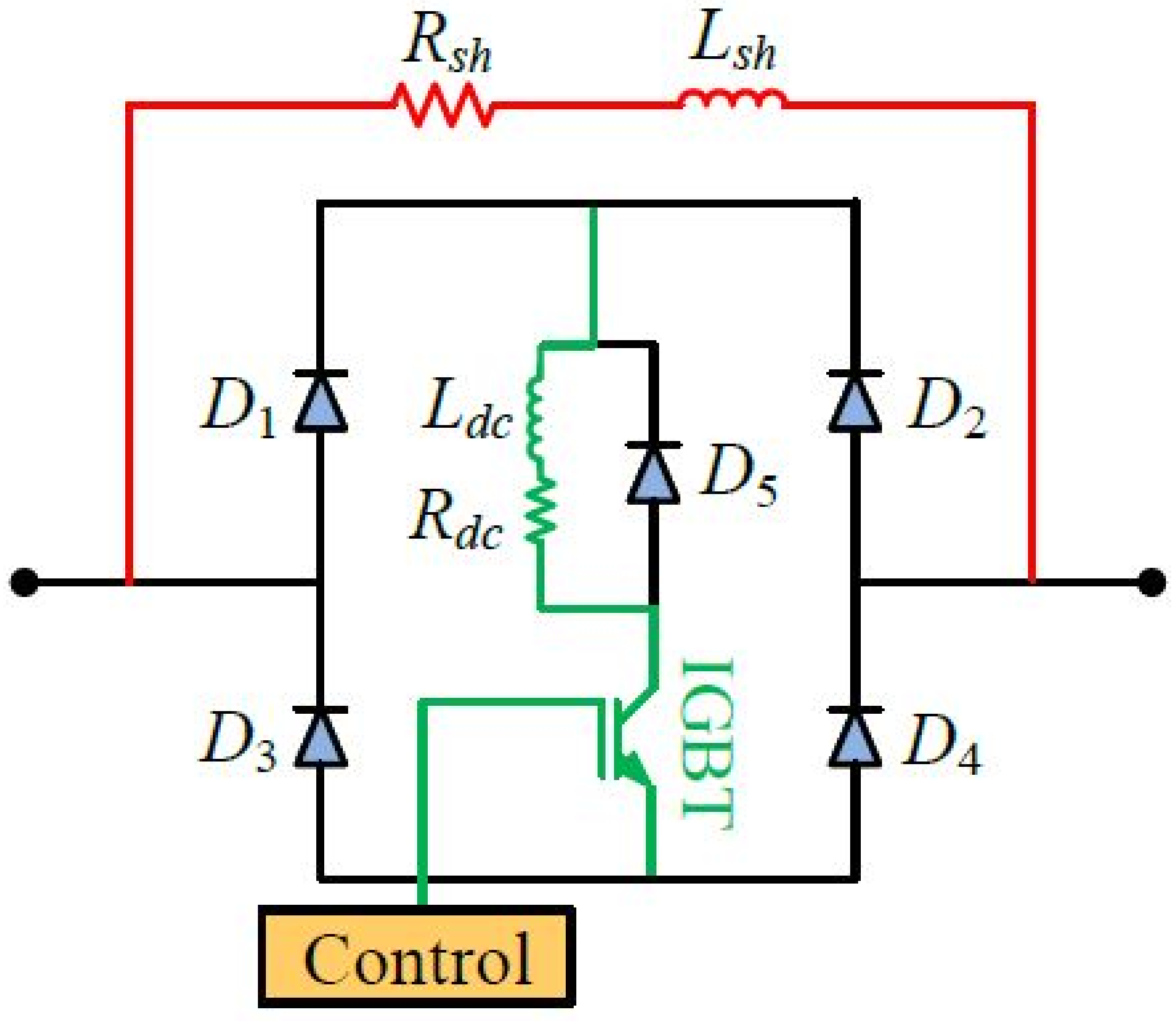
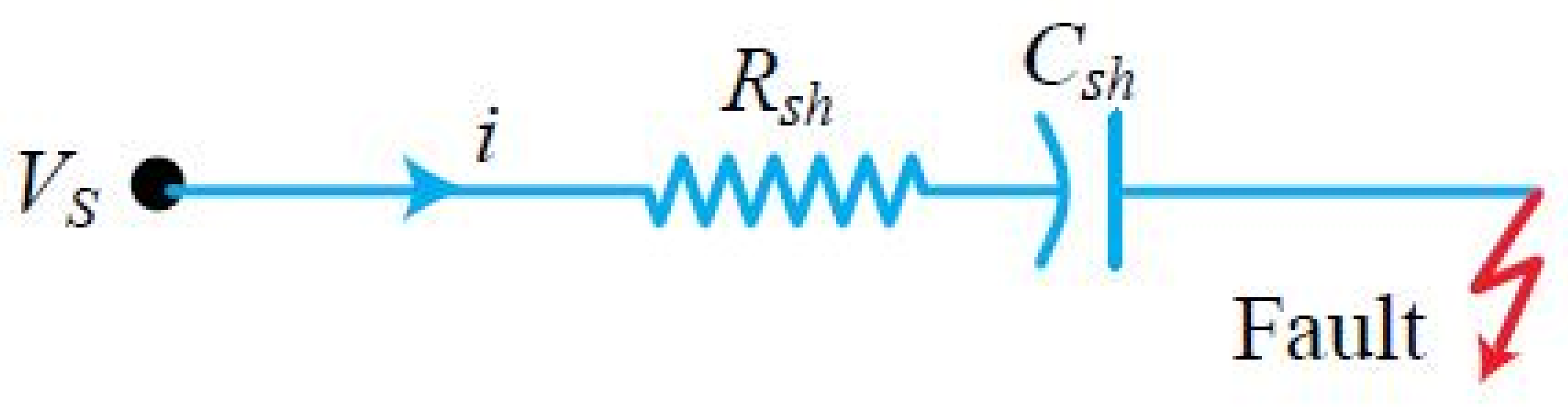
5.1. DFIG and PMSG Wind Turbines with BFCL
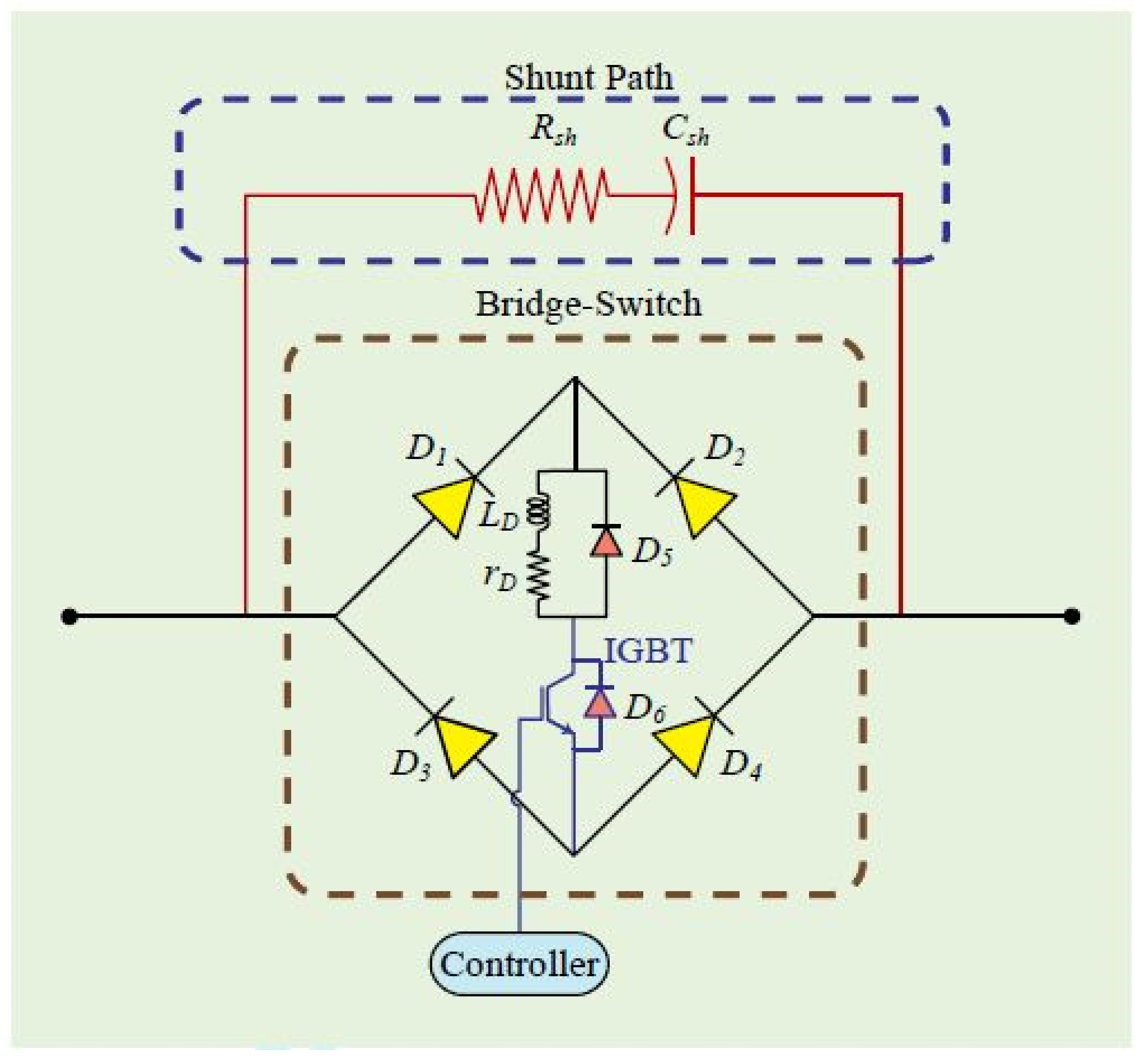
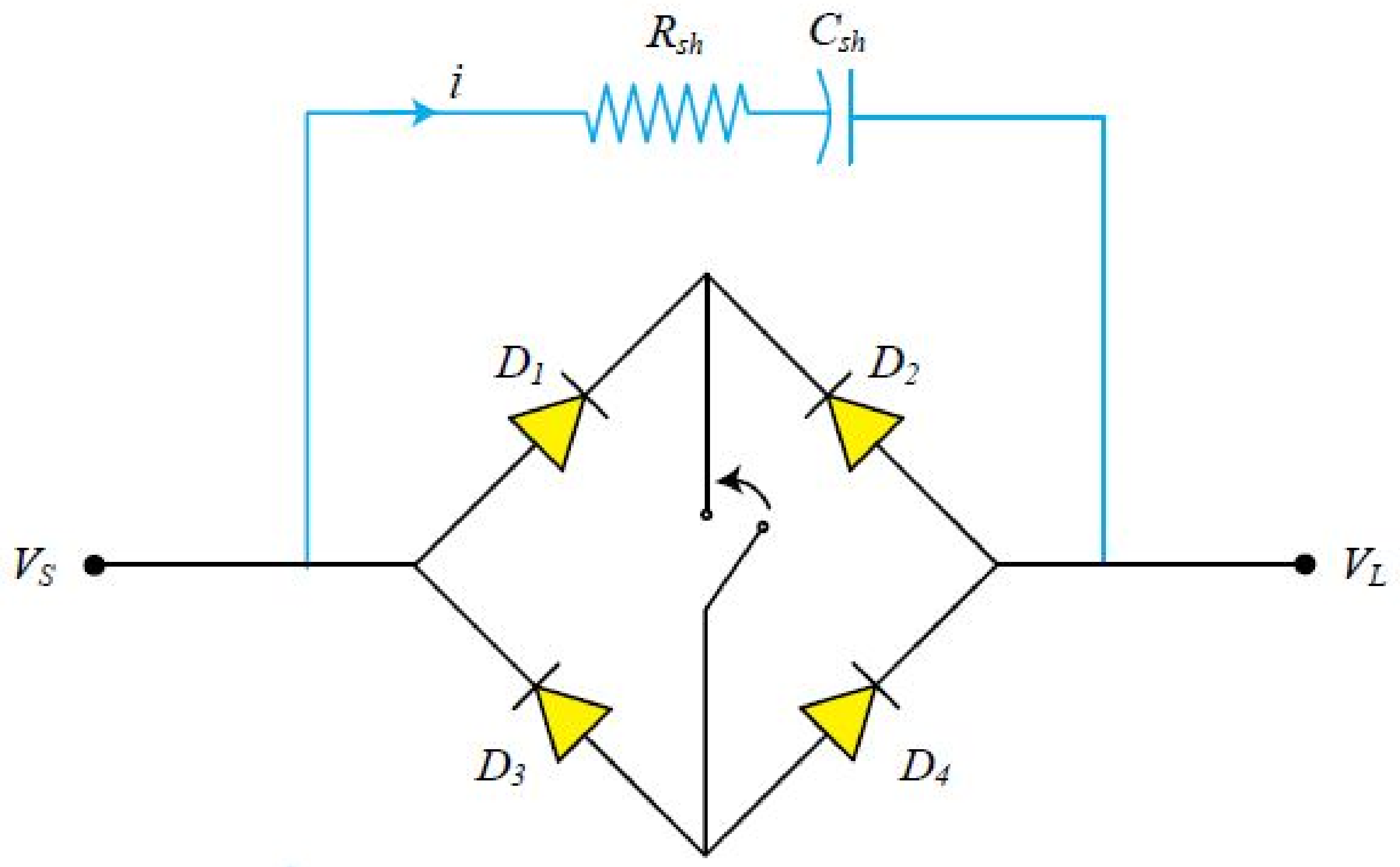
5.2. DFIG and PMSG Wind Turbines with CBFCL
6. Results and Discussions
- A.
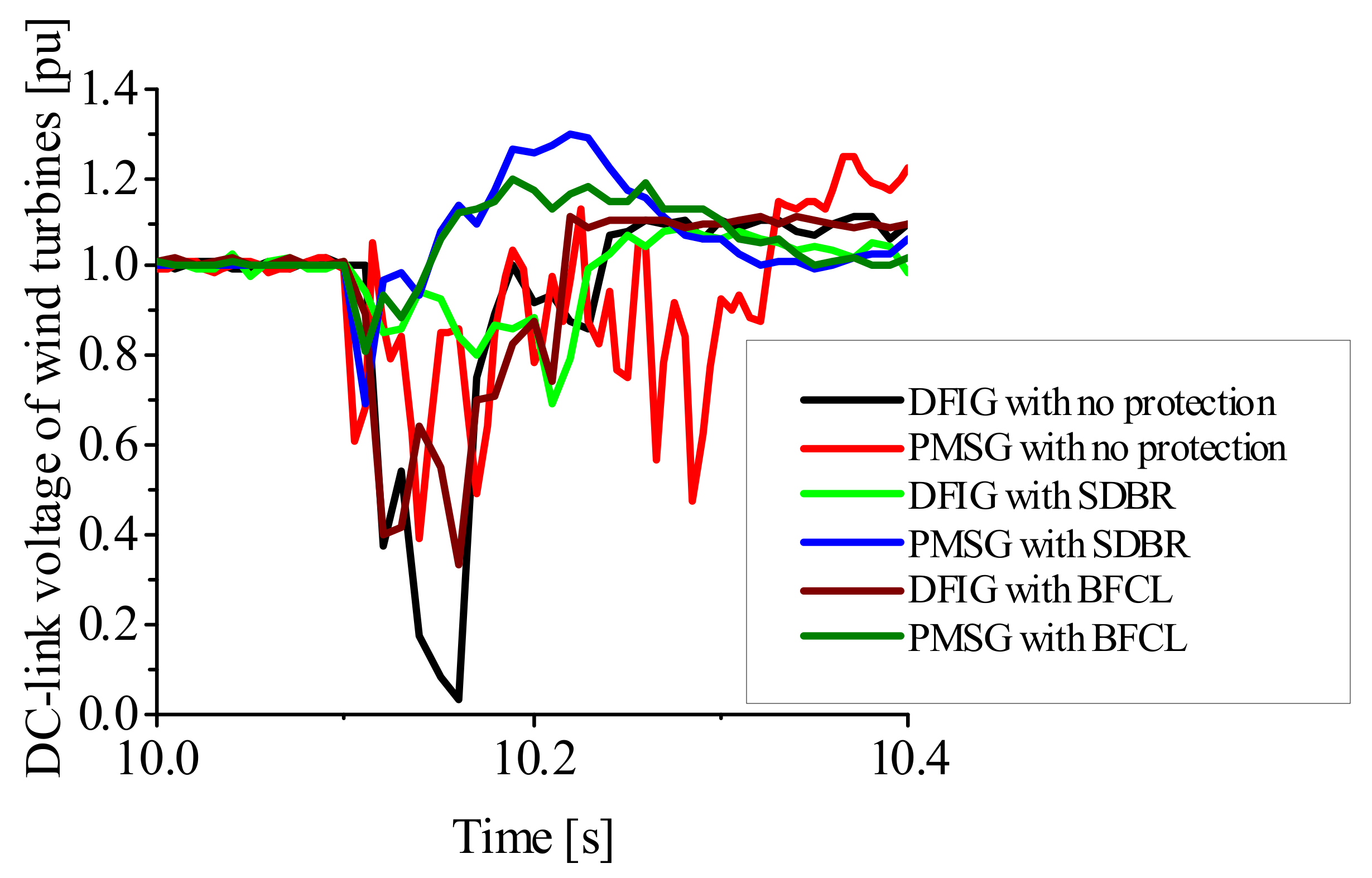
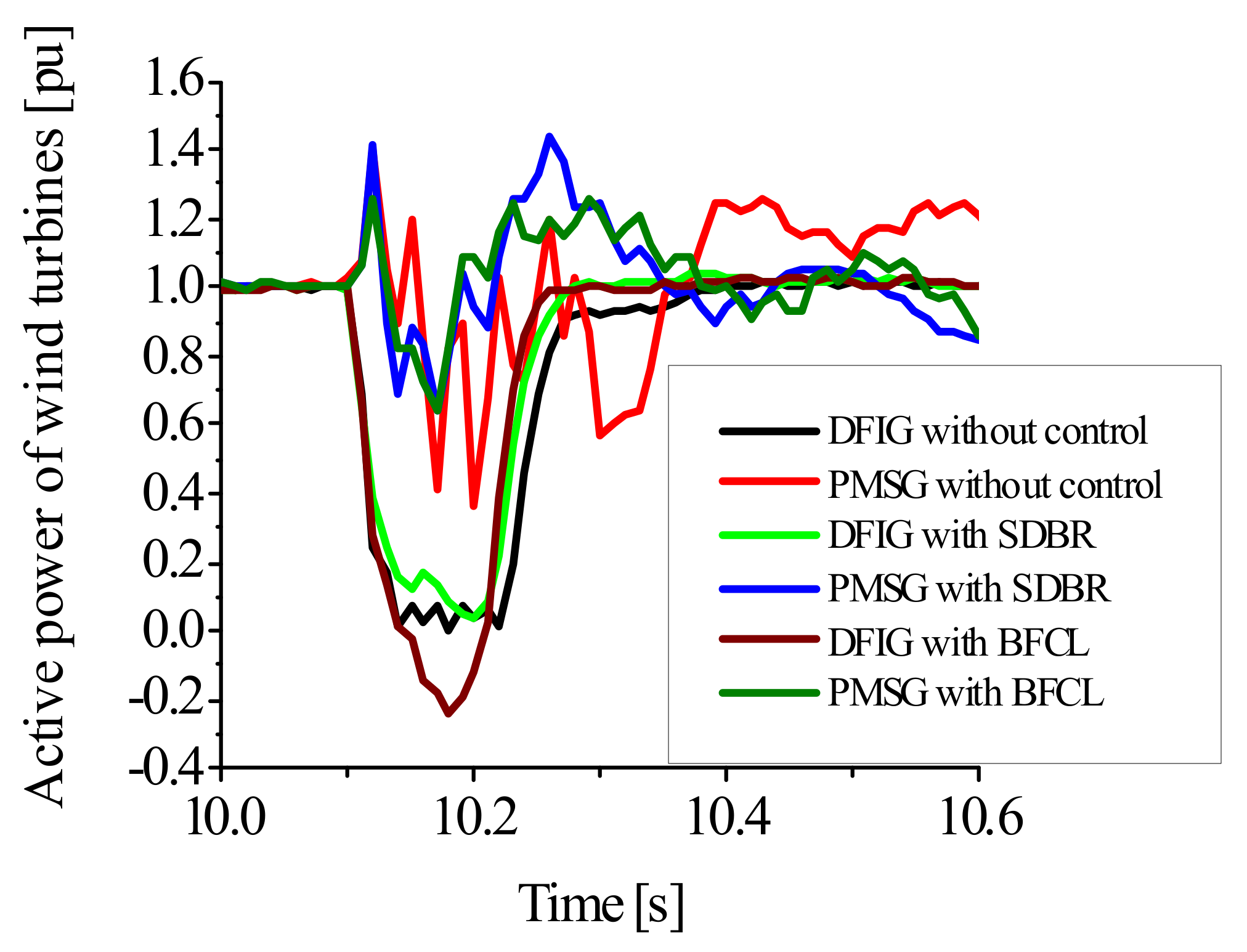
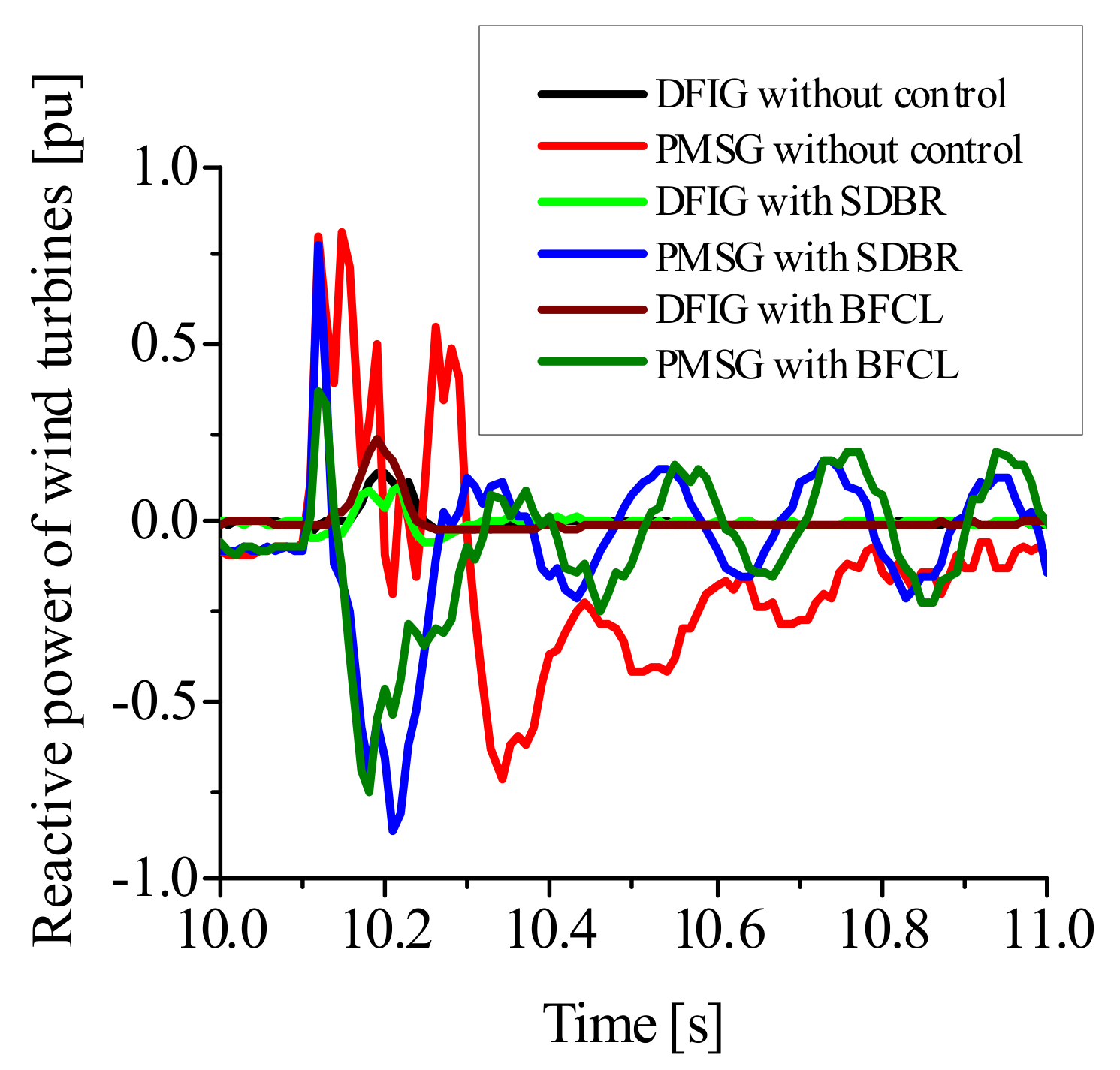
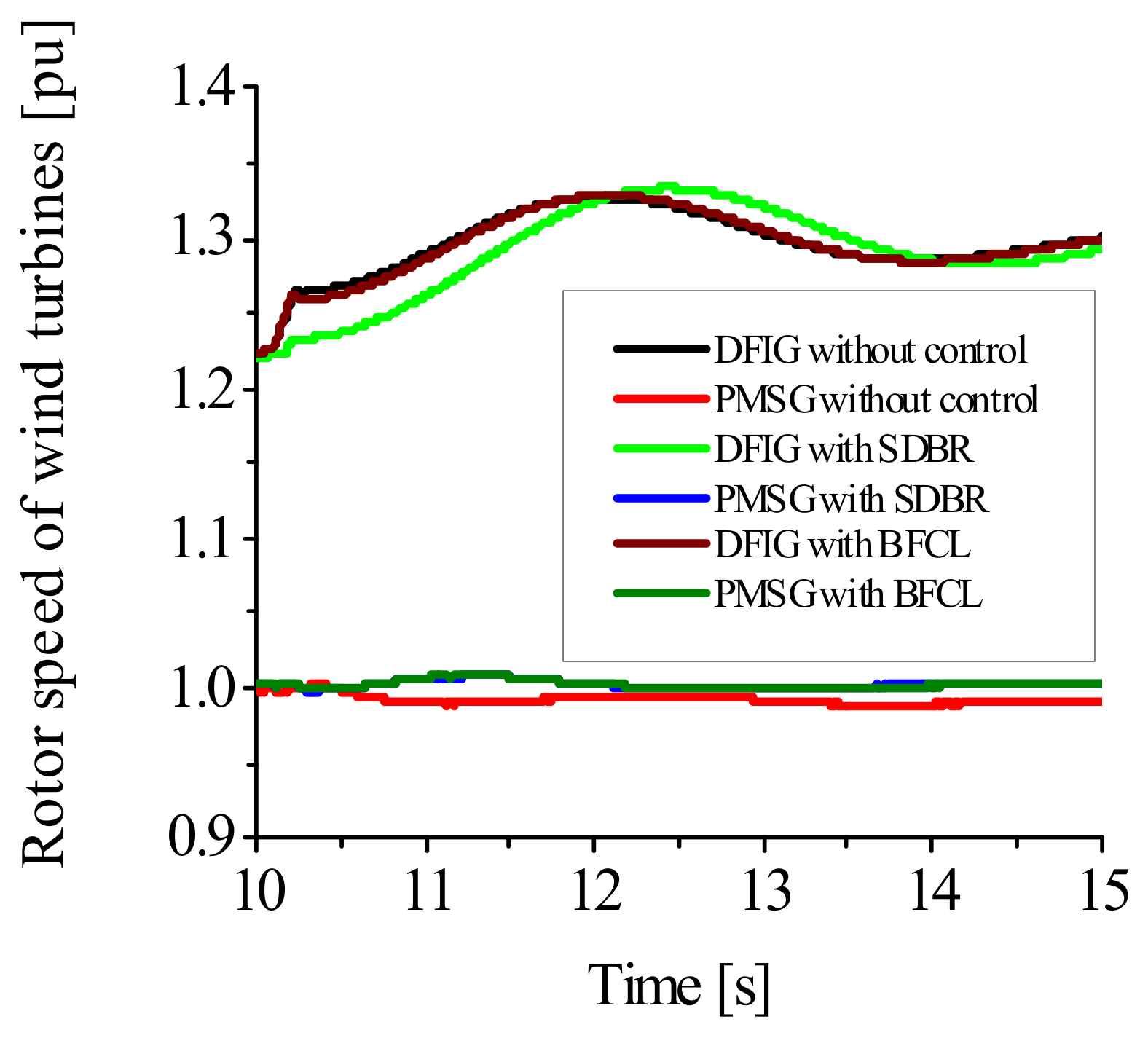
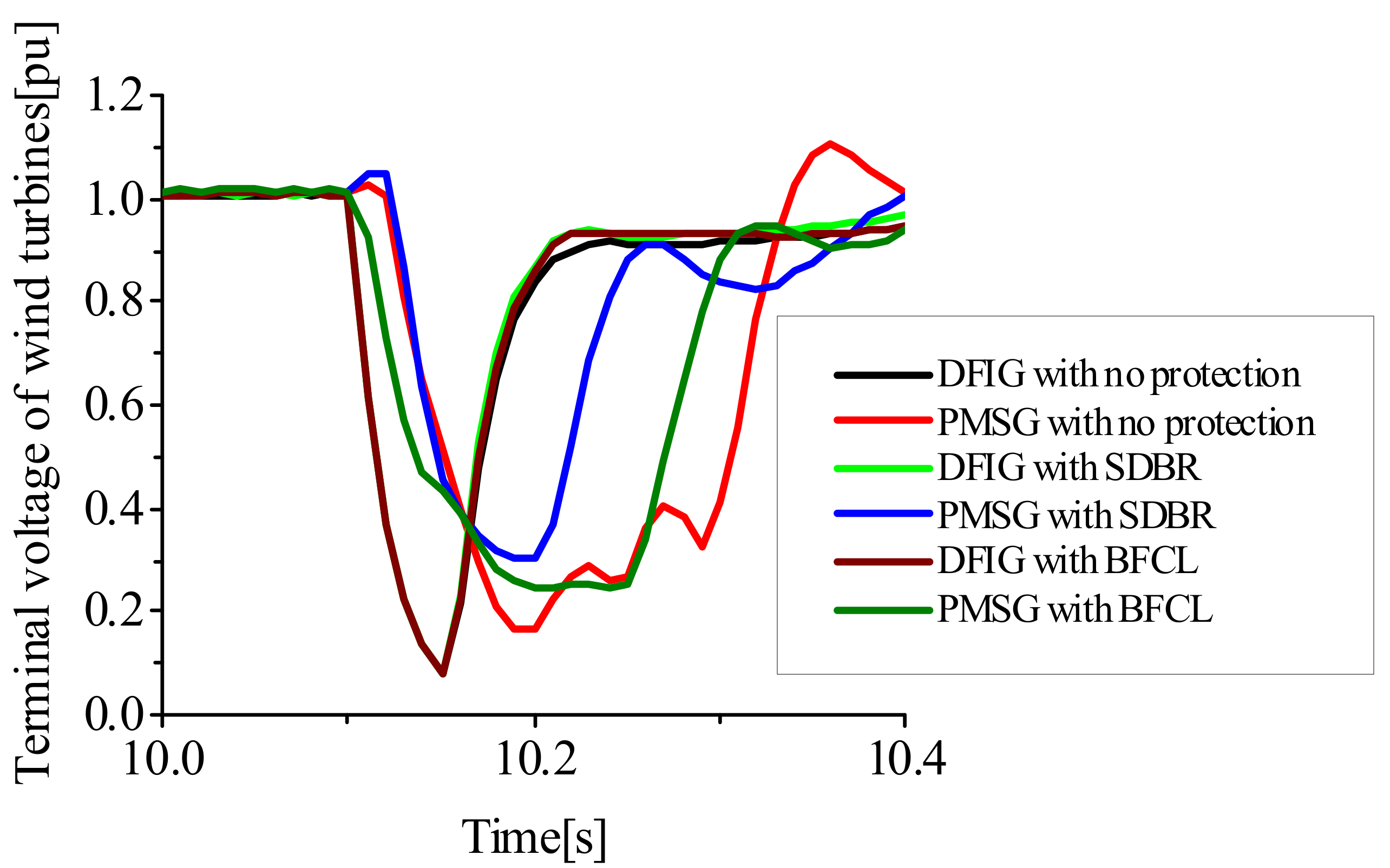
- Performance of the DFIG and PMSG wind turbines considering SDBR and BFCL
- B.
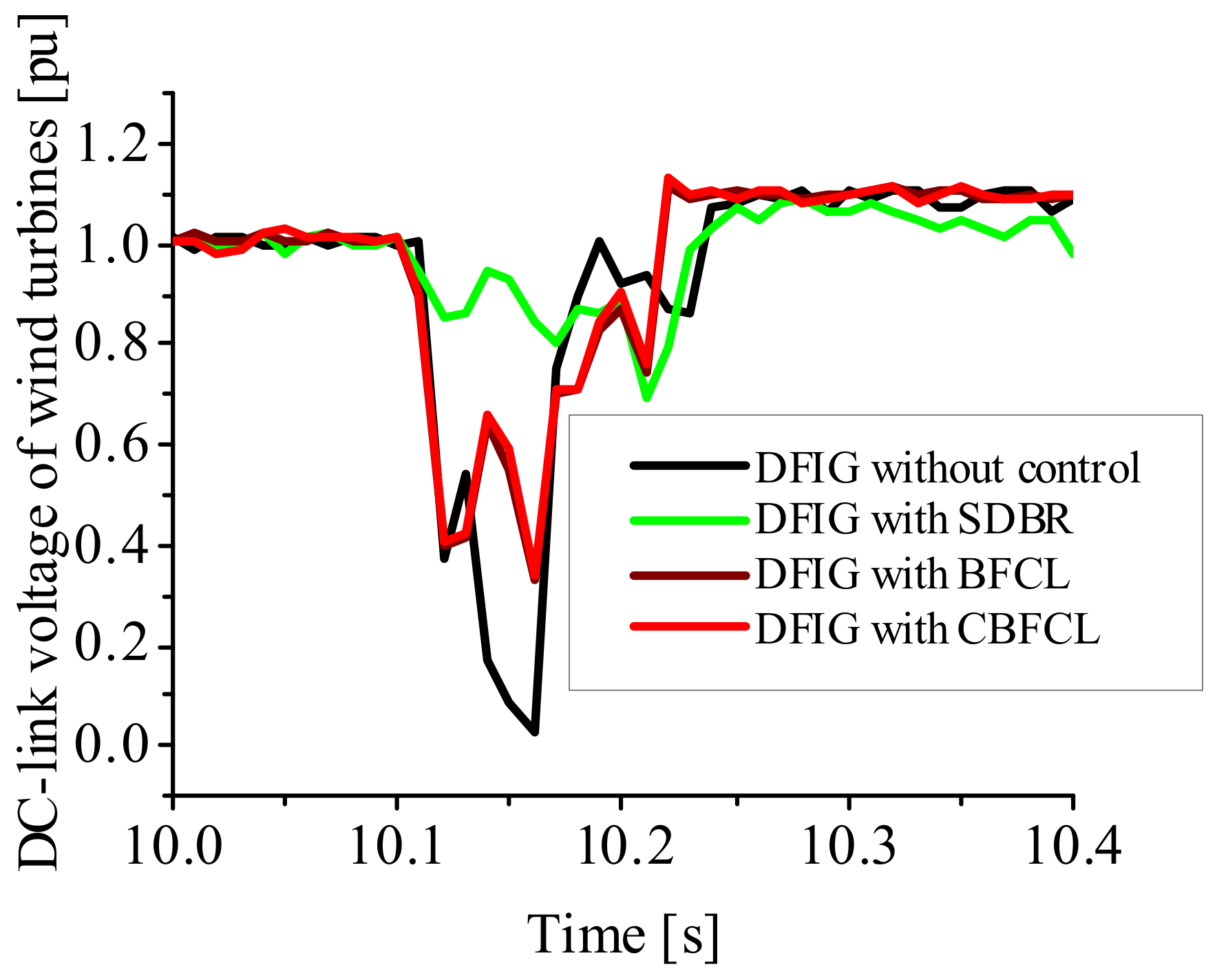
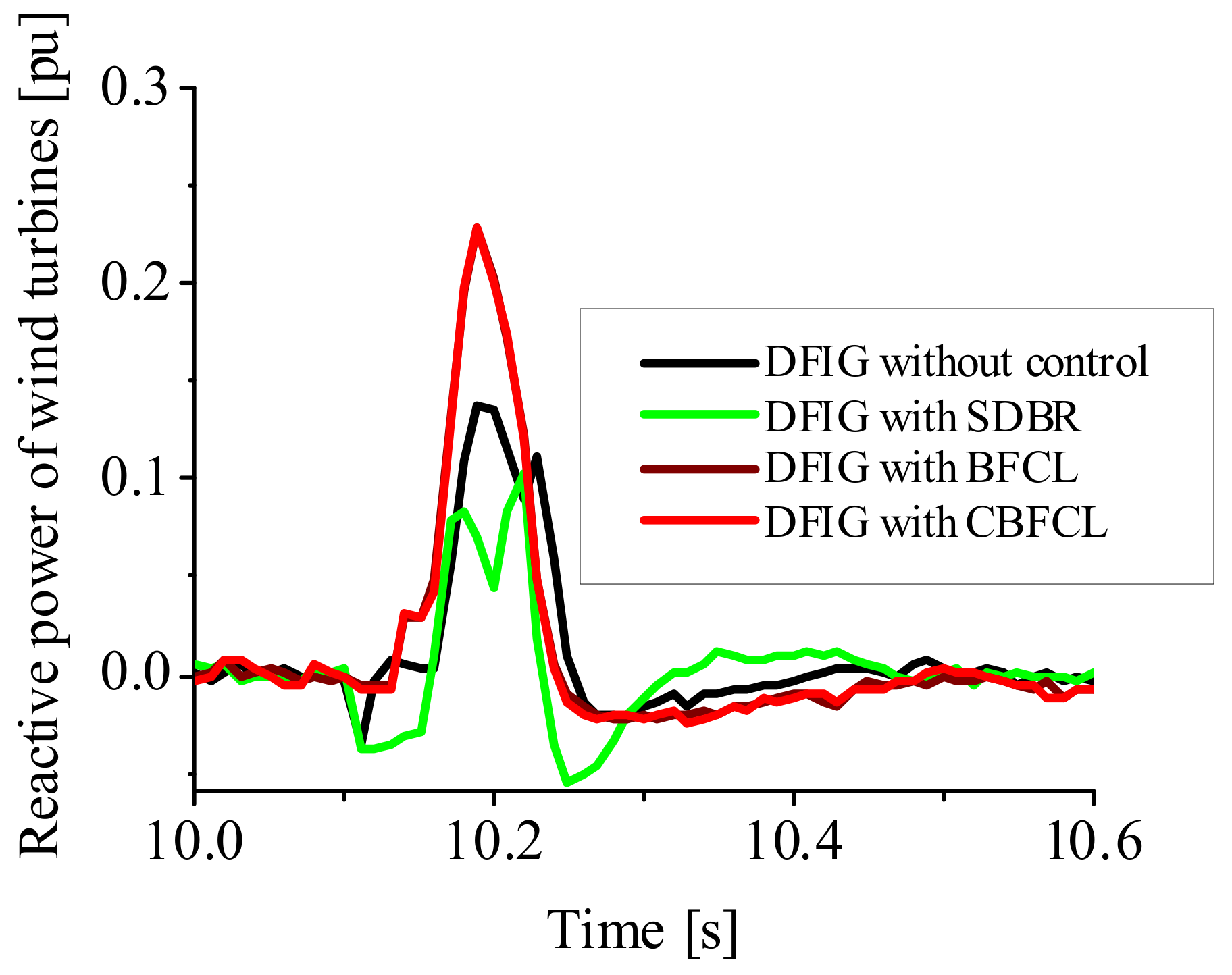
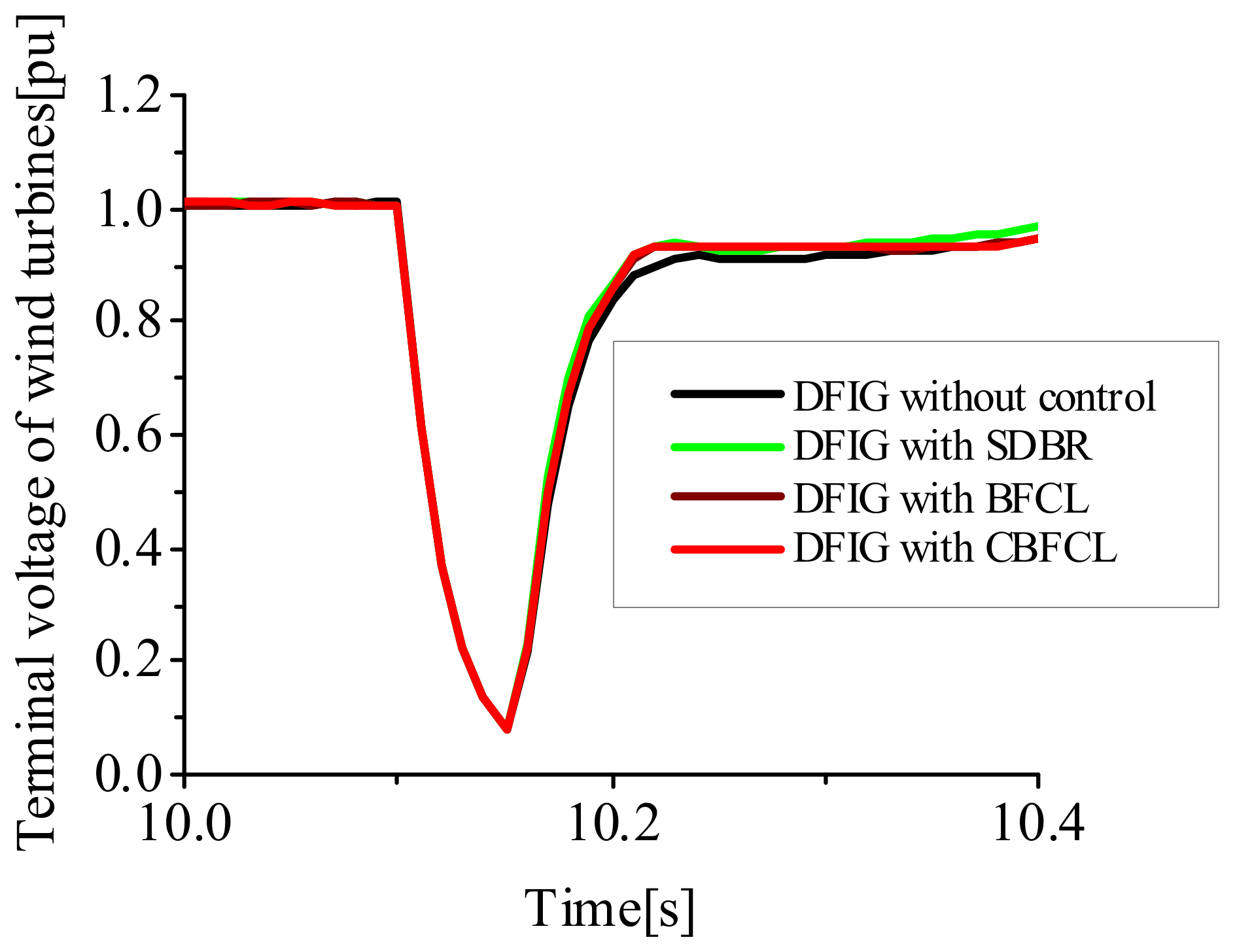
- Performance of the DFIG wind turbine considering SDBR, BFCL and CBFCL
- C.
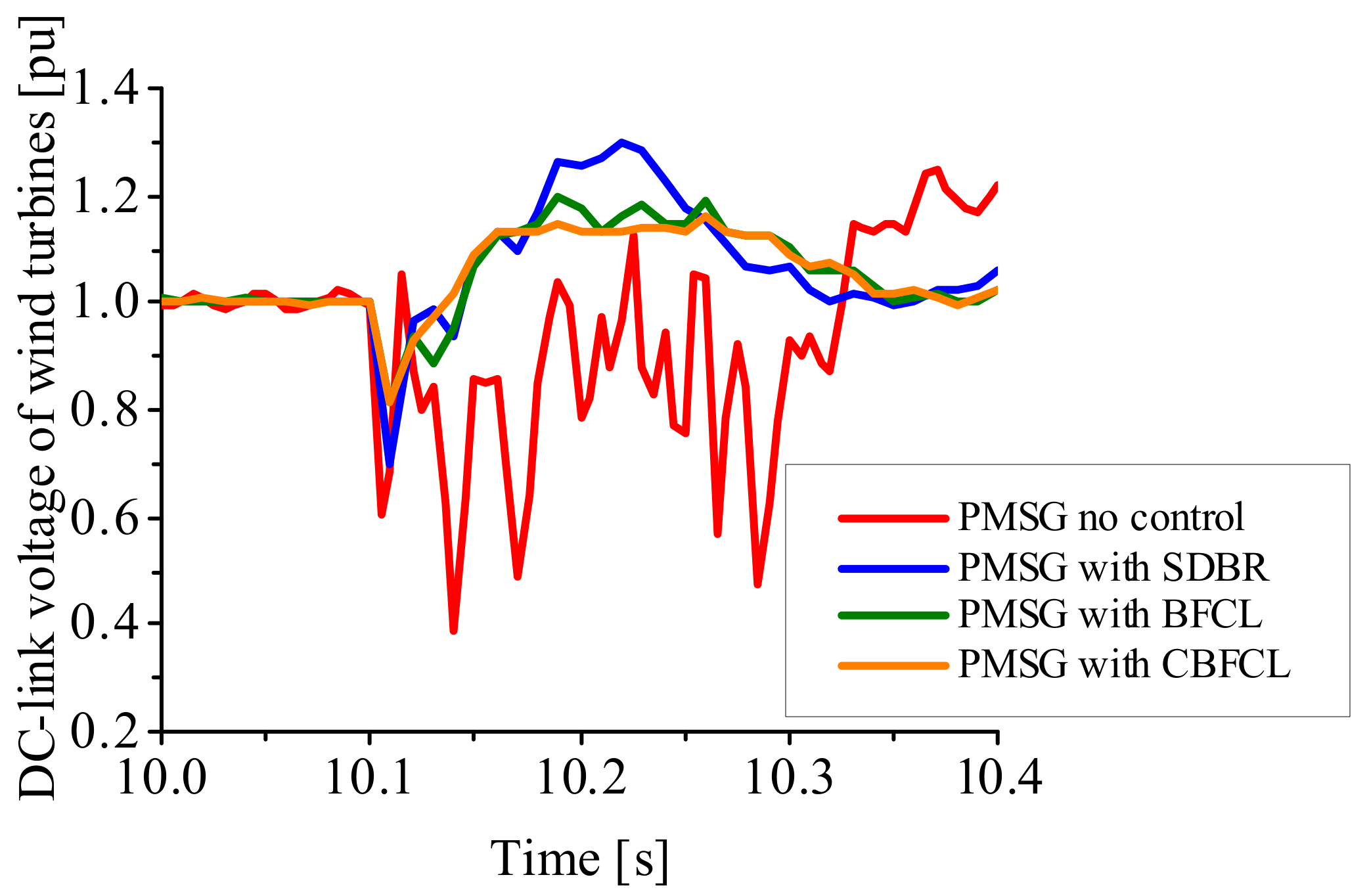
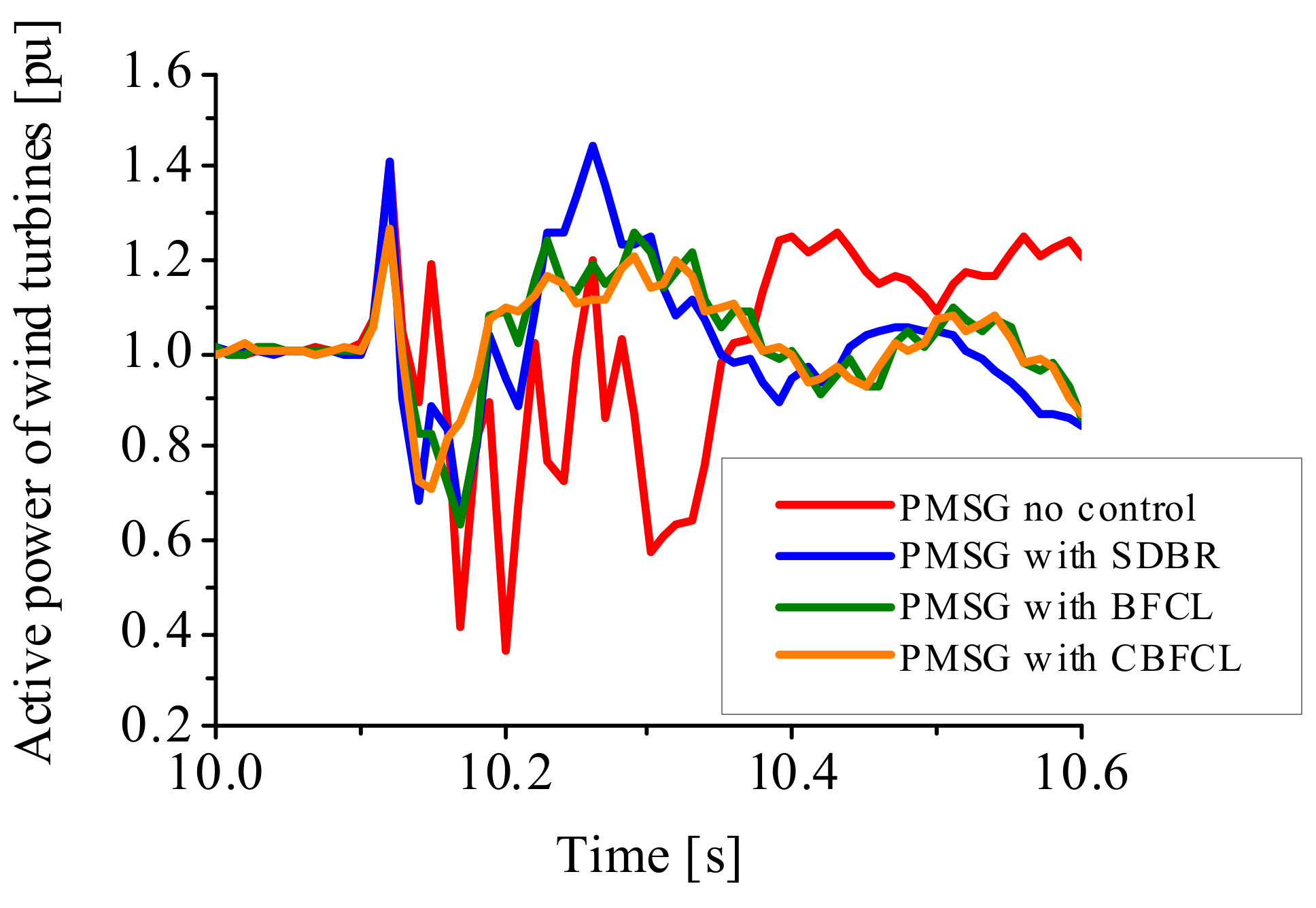
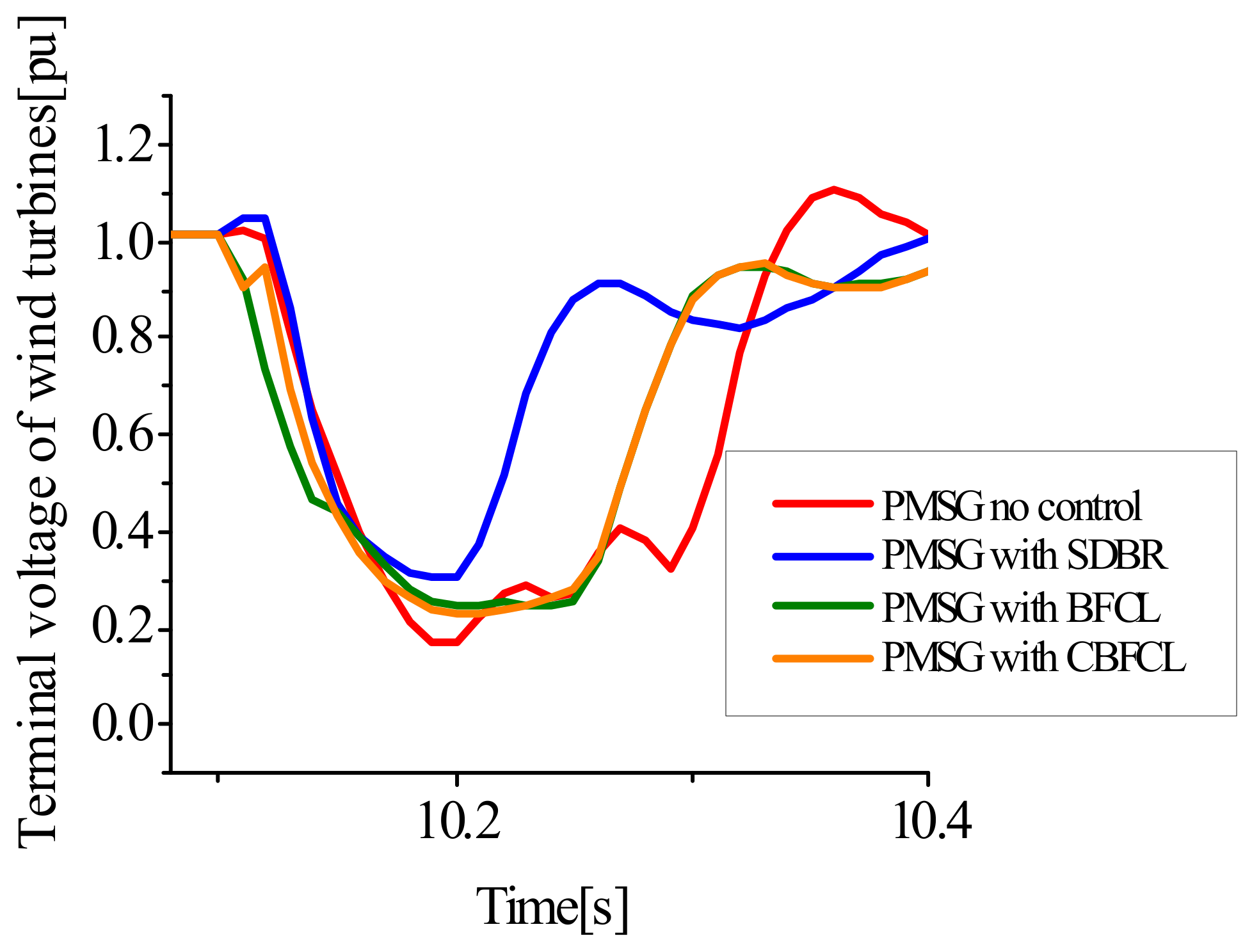
- Performance of the PMSG wind turbine considering SDBR, BFCL and CBFCL
7. Conclusions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| List of symbols | |
| reactance, | |
| resistance, | |
| impedance, | |
| torque, N | |
| air density, | |
| R | radius, m |
| wind speed, | |
| Power coefficient | |
| is the ratio of the tip speed | |
| is the turbine coefficient | |
| is the stator power, Watt | |
| is the rotor power, Watt | |
| quadrature axis rotor current, A direct axis rotor current, A | |
| stator reactive power, VA | |
| stator inductance, H | |
| magnetizing inductance, H | |
| rotor inductance, H | |
| stator flux, T | |
| stator angular frequency, Hz | |
| rotor angular frequency, Hz | |
| rotor leakage factor | |
| , | stationary frames |
| r | s FIG rotor and stator quantities |
| g | DFIG grid-side converter circuit quantity |
| L | inductance, H |
| R | resistance, |
| dc-link voltage, V | |
| reference power of turbine, W | |
| θr | rotor angle position |
| Isd, Isq | direct and quadrature stator current, A |
| Vsa*, Vsb*, Vsc* | reference abc stator voltages, V |
| Vsd* and Vsq* | reference dq stator voltages, V |
| Iga, Igb, Igc | abc grid currents, A |
| Vga, Vgb, Vgc | abc grid voltages, V |
| components of the stator’s voltage positive and negative sequences, V | |
| time constant of the stator flux, S | |
| natural flux, T | |
| rotor induced voltage | |
| , | dq current input of the rectifier’s axes, A |
| , | dq voltage of the grid voltage axes components, V |
| angular frequency voltage, Hz | |
| modulating signal of the rectifier’s d and q axes components | |
| modulation signal vector norm | |
| phase grid voltage amplitude, | |
| resistance of the series dynamic braking resistor, | |
| resistance of the load, | |
| available power at the DC, W | |
| maximal available power at the DC, W |
References
- Wind-Fuels and Technologies, International Energy Agency. 2021. Available online: https://www.iea.org (accessed on 21 May 2022).
- Nduwamungu, A.; Ntagwirumugara, E.; Mulolani, F.; Bashir, W. Fault Ride through Capability Analysis (FRT) in Wind Power Plants with Doubly Fed Induction Generators for Smart Grid Technologies. Energies 2020, 13, 4260. [Google Scholar] [CrossRef]
- Sitharthan, R.; Karthikeyan, M.; Sundar, D.S.; Rajasekaran, S. Adaptive hybrid intelligent MPPT controller to approximate effectual wind speed and optimal rotor speed of variable speed wind turbine. ISA Trans. 2020, 96, 479–489. [Google Scholar] [CrossRef] [PubMed]
- Okedu, K.E.; Muyeen, S.M.; Takahashi, R.; Tamura, J. Protection schemes for DFIG considering rotor current and DC-link voltage. In Proceedings of the 24th IEEE-ICEMS International Conference on Electrical Machines and System, Beijing, China, 20–23 August 2011; pp. 1–6. [Google Scholar]
- Ouyang, J.; Tang, T.; Yao, J.; Li, M. Active Voltage Control for DFIG-Based Wind Farm Integrated Power System by Coordinating Active and Reactive Powers under Wind Speed Variations. IEEE Trans. Energy Convers. 2019, 34, 1504–1511. [Google Scholar] [CrossRef]
- Okedu, K.E. Introductory Chapter of the book Power System Stability; INTECH: Horwich, UK, 2019; pp. 1–10. [Google Scholar]
- Shao, H.; Li, Z.; Zhou, D.; Sun, S.; Guo, L.; Rao, F. Stability Enhancement and Direct Speed Control of DFIG Inertia Emulation Control Strategy. IEEE Access 2019, 7, 120089–120105. [Google Scholar] [CrossRef]
- He, X.; Fang, X.; Yu, J. Distributed Energy Management Strategy for Reaching Cost-Driven Optimal Operation Integrated with Wind Forecasting in Multimicrogrids System. IEEE Trans. Syst. Man Cyber. Syst. 2019, 49, 1643–1651. [Google Scholar] [CrossRef]
- Qazi, H.W.; Wall, P.; Escudero, M.V.; Carville, C.; Cunniffe, N.; Sullivan, J.O. Impacts of Fault Ride Through Behavior of Wind Farms on a Low Inertia System. IEEE Trans. Power Syst. 2020, 28, 1. [Google Scholar] [CrossRef]
- Chunli, L.; Zefu, T.; Huang, Q.; Nie, W.; Yao, J. Lifetime Evaluation of IGBT Module in DFIG Considering Wind Turbulence and Nonlinear Damage Accumulation Effect. In Proceedings of the 2019 IEEE 2nd International Conference on Automation, Electronics and Electrical Engineering (AUTEEE), Shenyang, China, 22–24 November 2019. [Google Scholar]
- Okedu, K.E.; Muyeen, S.M.; Takahashi, R.; Tamura, J. Use of Supplementary Rotor Current Control in DFIG to Augment Fault Ride Through of Wind Farm as per Grid Requirement. In Proceedings of the 37th Annual Conference of IEEE Industrial Electronics Society (IECON 2011), Melbourne, Australia, 7–10 November 2011. [Google Scholar]
- Okedu, K.E.; Muyeen, S.M.; Takahashi, R.; Tamura, J. Improvement of Fault Ride Through Capability of Wind Farm using DFIG Considering SDBR. In Proceedings of the14th European Conference of Power Electronics EPE, Birmingham, UK, 30 August–1 September 2011; pp. 1–10. [Google Scholar]
- Okedu, K.E. Enhancing DFIG Wind Turbine during Three-phase Fault Using Parallel Interleaved Converters and Dynamic Resistor. IET Renew. Power Gener. 2016, 10, 1211–1219. [Google Scholar] [CrossRef]
- Okedu, K.E.; Muyeen, S.M.; Takahashi, R.; Tamura, J. Participation of FACTS in Stabilizing DFIG with Crowbar during Grid Fault Based on Grid Codes. In Proceedings of the 6th IEEE-GCC Conference and Exhibition, Dubai, UAE, 19–22 February 2011; pp. 365–368. [Google Scholar]
- Boujoudi, B.; Kheddioui, E.; Machkour, N.; Achalhi, A.; Bezza, M. Comparative study between different types of control of the wind turbine in case of voltage dips. In Proceedings of the 2018 Renewable Energies, Power Systems & Green Inclusive Economy (REPS-GIE), Casablanca, Morocco, 23–24 April 2018; pp. 1–5. [Google Scholar]
- Okedu, K.E.; Muyeen, S.M.; Takahashi, R.; Tamura, J. Comparative Study between Two Protection Schemes for DFIG-based Wind Generator. In Proceedings of the 23rd IEEE-ICEMS (International Conference on Electrical Machines and Systems), Seoul, Korea, 10–13 October 2010; pp. 62–67. [Google Scholar]
- Okedu, K.E.; Muyeen, S.M.; Takahashi, R.; Tamura, J. Stabilization of wind farms by DFIG-based variable speed wind generators. In Proceedings of the International Conference of Electrical Machines and Systems (ICEMS), Seoul, Korea, 10–13 October 2010; pp. 464–469. [Google Scholar]
- Bekakra, Y.; Attous, D.B. Sliding Mode Controls of Active and Reactive Power of a DFIG with MPPT for Variable Speed Wind Energy Conversion. Aust. J. Basic. Appl. Sci. 2011, 5, 2274–2286. [Google Scholar]
- Ali, D.M.; Jemli, K.; Jemli, M.; Gossa, M. Doubly Fed Induction Generator, with Crowbar System under Micro-Interruptions Fault. Int. J. Electr. Eng. Inform. 2010, 2, 216–231. [Google Scholar]
- Suthar, D.B. Wind Energy Integration for DFIG Based Wind Turbine Fault Ride Through. Indian J. Appl. Res. 2014, 4, 216–220. [Google Scholar] [CrossRef]
- Lamchich, M.T.; Lachguer, N. Matlab, Simulink as Simulation Tool for Wind Generation Systems Based on Doubly Fed Induction Machines. In MATLAB—A Fundamental Tool for Scientific Computing and Engineering Applications; Chapter 7; INTECH Publishing: Horwich, UK, 2012; Volume 2, pp. 139–160. [Google Scholar]
- Noubrik, A.; Chrifi-Alaoui, L.; Bussy, P.; Benchaib, A. Analysis and Simulation of a 1.5MVA Doubly Fed Wind Power in Matlab Sim PowerSystems using Crowbar during Power Systems Disturbances. In Proceedings of the IEEE-2011 International Conference on Communications, Computing and Control Applications (CCCA), Hammamet, Tunisia, 3–5 March 2011. [Google Scholar]
- Nasiri, M.; Mohammadi, R. Peak current limitation for grid-side inverter by limited active power in PMSG-based wind turbines during different grid faults. IEEE Trans. Sustain. Energy 2017, 8, 3–12. [Google Scholar] [CrossRef]
- Gencer, A. Analysis and control of fault ride through capability improvement PMSG based on WECS using active crowbar system during different fault conditions. Elektron. Elektrotech 2018, 24, 64–69. [Google Scholar] [CrossRef] [Green Version]
- Yehia, D.M.; Mansour, D.A.; Yuan, W. Fault ride-through enhancement of PMSG wind turbines with DC microgrids using resistive-type SFCL. IEEE Trans. Appl. Supercond. 2018, 28, 1–5. [Google Scholar] [CrossRef]
- Islam, R.; Huda, N.; Hasan, J.; Sadi, M.A.H.; AbuHussein, A.; Roy, T.K.; Mahmud, A. Fault ride through capability improvement of dfig based wind farm using nonlinear controller based bridge-type flux coupling non-superconducting fault current limiter. Energies 2020, 13, 1696. [Google Scholar] [CrossRef] [Green Version]
- Firouzi, M. Low-voltage ride-through (lvrt) capability enhancement of dfig-based wind farm by using bridge-type superconducting fault current limiter (btsfcl). J. Power Technol. 2020, 99, 245–253. [Google Scholar]
- Islam, M.R.; Hasan, J.; Hasan, M.M.; Huda, M.N.; Sadi, M.A.H. AbuHussein, Performance improvement of dfig-based wind farms using narma-l2 controlled bridge-type flux coupling non-superconducting fault current limiter. IET Gener. Transm. Distrib. 2021, 14, 6580–6593. [Google Scholar] [CrossRef]
- Hasan, J.; Islam, M.R.; Islam, M.R.; Kouzani, A.Z.; Mahmud, M.P. A capacitive bridge-type superconducting fault current limiter to improve the transient performance of dfig/pv/sg-based hybrid power system. IEEE Trans. Appl. Supercond. 2021, 31, 1–5. [Google Scholar] [CrossRef]
- Rashid, G.; Ali, M.H. A modified bridge-type fault current limiter for fault ride-through capacity enhancement of fixed speed wind generator. IEEE Trans. Energy Convers. 2014, 29, 527–534. [Google Scholar]
- Moghimian, M.M.; Radmehr, M.; Firouzi, M. Series resonance fault current limiter (SRFCL) with mov for lvrt enhancement in dfig-based wind farms. Electr. Power Compon. Syst. 2019, 47, 1814–1825. [Google Scholar] [CrossRef]
- Yang, J.; Fletcher, J.E.; O’Reilly, J. A series-dynamic-resistor-based converter protection scheme for doubly-fed induction generator during various fault conditions. IEEE Trans. Energy Convers. 2010, 25, 422–432. [Google Scholar] [CrossRef] [Green Version]
- Din, Z.; Zhang, J.; Xu, Z.; Zhang, Y.; Zhao, J. Low voltage and high voltage ride-through technologies for doubly fed induction generator system: Comprehensive review and future trends. IET Renew. Power Gener. 2021, 15, 614–630. [Google Scholar] [CrossRef]
- Firouzi, M.; Gharehpetian, G. Improving fault ride-through capability of fixed-speed wind turbine by using bridge-type fault current limiter. IEEE Trans. Energy Convers. 2013, 28, 361–369. [Google Scholar] [CrossRef]
- Naderi, S.B.; Jafari, M.; Hagh, M.T. Parallel-resonance-type fault current limiter. IEEE Trans. Ind. Electron. 2012, 60, 2538–2546. [Google Scholar] [CrossRef] [Green Version]
- PSCAD/EMTDC Manual; Version 4.6.0; Manitoba HVDC Lab.: Winnipeg, MB, Canada, 2016.
- Garcia-Garcia, M.; Comech, M.P.; Sallan, J.; Liombart, A. Modelling Wind Farms for Grid Disturbances Studies. Sci. Direct Renew. Energy 2008, 33, 2019–2121. [Google Scholar]
- Okedu, K.E.; Muyeen, S.M.; Takahashi, R.; Tamura, J. Application of SDBR with DFIG to Augment Wind Farm Fault Ride Through. In Proceedings of the 24th IEEE-ICEMS (International Conference on Electrical Machines and Systems), Beijing, China, 20–23 August 2011; pp. 1–6. [Google Scholar]
- Okedu, K.E. Enhancing the performance of DFIG variable speed wind turbine using parallel integrated capacitor and modified modulated braking resistor. IET Gener. Transm. Distrib. 2019, 13, 3378–3387. [Google Scholar] [CrossRef]
- Okedu, K.E. Improving the transient performance of DFIG wind turbine using pitch angle controller low pass filter timing and network side connected damper circuitry. IET Renew. Power Gener. 2020, 14, 1219–1227. [Google Scholar] [CrossRef]
- Zubia, I.; Ostolaza, J.X.; Susperrgui, A.; Ugartemendia, J.J. Multi-machine transient modeling of wind farms, an essential approach to the study of fault conditions in the distribution network. Appl. Energy 2012, 89, 421–429. [Google Scholar] [CrossRef]
- Kong, X.; Xianggen, Z.Z.; Wen, M. Study of fault current characteristics of the DFIG considering dynamic response of the RSC. IEEE Trans. Energy Convers. 2014, 2, 278–287. [Google Scholar] [CrossRef]
- Li, Y.; Xu, Z.; Wong, K.P. Advanced control strategies of PMSG-based wind turbines for system inertia support. IEEE Trans. Power Syst. 2017, 32, 3027–3037. [Google Scholar] [CrossRef]
- Priyadarshi, N.; Ramachandaramurthy, V.; Padmanaban, S.; Azam, F. An ant colony optimized MPPT for standalone hybrid PV-wind power system with single Cuk converter. Energies 2019, 12, 167. [Google Scholar] [CrossRef] [Green Version]
- Lee, S.W.; Chun, K.H. Adaptive sliding mode control for PMSG wind turbine systems. Energies 2019, 12, 595. [Google Scholar] [CrossRef] [Green Version]
- Li, S.; Haskew, T.A.; Xu, L. Conventional and novel control design for direct driven PMSG wind turbines. Electr. Power Syst. Res. 2010, 80, 328–338. [Google Scholar] [CrossRef]
- Yang, D.; Ruan, X.; Wu, H. Impedance shaping of the grid-connected inverter with LCL filter to improve its adaptability to the weak grid condition. IEEE Trans. Power Electron. 2014, 29, 5795–5805. [Google Scholar] [CrossRef]
- Thierry, C.V. Voltage Stability of Electric Power Systems; Springer: Berlin/Heidelberg, Germany, 1998. [Google Scholar]
- Grunau, S.; Fuchs, W.F. Effect of Wind-Energy Power Injection into Weak Grids; Institute for Power Electronics and Electrical Drives, Christian-Albrechts-University of Kiel D-24143 Kiel: Kiel, Germany, 2012; pp. 1–7. [Google Scholar]
- Rashid, G.; Ali, M.H. Fault ride through capability improvement of DFIG based wind farm by fuzzy logic controlled parallel resonance fault current limiter. Electr. Power Syst. Res. 2017, 146, 1–8. [Google Scholar] [CrossRef]
- Rashid, G.; Ali, M.H. Nonlinear control-based modified BFCL for LVRT capacity enhancement of DFIG-based wind farm. IEEE Trans. Energy Convers. 2016, 32, 284–295. [Google Scholar] [CrossRef]




























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| DFIG Wind Turbine | PMSG Wind Turbine | ||
|---|---|---|---|
| rated power | 5.0 MW | rated power | 5.0 MW |
| stator resistance | 0.01 pu | stator resistance | 0.01 pu |
| d-axis reactance | 1.0 pu | d-axis reactance | 1.0 pu |
| q-axis reactance | 0.7 pu | q-axis reactance | 0.7 pu |
| machine inertia (H) | 3.0 s | machine inertia (H) | 3.0 s |
| effective DC-link protection | 0.2 | effective DC-link protection | 0.2 |
| SDBR | BFCL | CBFCL | ||||||
|---|---|---|---|---|---|---|---|---|
| Series resistance (Rs) 0.1 pu | Rsh | Lsh | Rdc | Ldc | Rsh | Lsh | Rdc | Csh |
| 20 Ω | 20 Ω | 0.003 Ω | 1 mH | 20 Ω | 250 mH | 0.003 Ω | 69 | |
| DFIG Wind Turbine | PMSG Wind Turbine | ||||||||
|---|---|---|---|---|---|---|---|---|---|
| Variable | Metric | No Control | SDBR | BFCL | Variable | Metric | No Control | SDBR | BFCL |
| DC-link voltage | Overshoot | 1.10 pu | 1.08 pu | 1.10 pu | DC-link voltage | Overshoot | 1.30 pu | 1.30 pu | 1.20 pu |
| Dip | 0.01 pu | 0.70 pu | 0.30 pu | Dip | 0.40 pu | 0.70 pu | 0.80 pu | ||
| Settling time | 0.40 s | 0.30 s | 0.32 s | Settling time | >0.50 s | 0.25 s | 0.30 s | ||
| Active power | Overshoot | 0.00 pu | 1.20 pu | 1.10 pu | Active power | Overshoot | 1.20 pu | 1.40 pu | 1.20 pu |
| Dip | 0.00 pu | 0.00 pu | −0.20 pu | Dip | 0.40 pu | 0.80 pu | 0.80 pu | ||
| Settling time | 0.40 s | 0.25 s | 0.22 s | Settling time | >0.60 s | 0.450 s | 0.45 s | ||
| Reactive power | Overshoot | 0.20 pu | 0.10 pu | 0.25 pu | Reactive power | Overshoot | 0.75 pu | 0.75 pu | 0.30 pu |
| Dip | 0.00 pu | 0.10 pu | 0.00 pu | Dip | −0.75 pu | −0.75 pu | −0.75 pu | ||
| Settling time | 0.25 s | 0.25 s | 0.25 s | Settling time | >1.00 s | <0.90 s | <0.90 s | ||
| Terminal voltage | Overshoot | 0.02 pu | 0.00 pu | 0.00 pu | Terminal voltage | Overshoot | 1.10 pu | 1.01 pu | 0.00 pu |
| Dip | 0.10 pu | 0.10 pu | 0.10 pu | Dip | 0.15 pu | 0.30 pu | 0.25 pu | ||
| Settling time | 0.60 s | 0.40 s | 0.40 s | Settling time | >0.40 s | 0.40 s | 0.35 s | ||
| DFIG Wind Turbine | PMSG Wind Turbine | ||||||
|---|---|---|---|---|---|---|---|
| Variable | Metric | No Control | CBFCL | Variable | Metric | No Control | CBFCL |
| DC-link voltage | Overshoot | 1.10 pu | 1.10 pu | DC-link voltage | Overshoot | 1.30 pu | 1.09 pu |
| Dip | 0.01 pu | 0.30 pu | Dip | 0.40 pu | 0.80 pu | ||
| Settling time | 0.40 s | 0.22 s | Settling time | >0.50 s | 0.35 s | ||
| Reactive power | Overshoot | 0.20 pu | 0.22 pu | Active power | Overshoot | 1.20 pu | 1.20 pu |
| Dip | 0.00 pu | 0.11 pu | Dip | 0.40 pu | 0.70 pu | ||
| Settling time | 0.25 s | 0.25 s | Settling time | >0.60 s | 0.45 s | ||
| Terminal voltage | Overshoot | 0.02 pu | 0.00 pu | Terminal voltage | Overshoot | 1.10 pu | 1.00 pu |
| Dip | 0.10 pu | 0.10 pu | Dip | 0.15 pu | 0.30 pu | ||
| Settling time | 0.60 s | 0.40 s | Settling time | >0.40 s | 0.35 s | ||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Okedu, K.E. Augmentation of DFIG and PMSG Wind Turbines Transient Performance Using Different Fault Current Limiters. Energies 2022, 15, 4817. https://doi.org/10.3390/en15134817
Okedu KE. Augmentation of DFIG and PMSG Wind Turbines Transient Performance Using Different Fault Current Limiters. Energies. 2022; 15(13):4817. https://doi.org/10.3390/en15134817
Chicago/Turabian StyleOkedu, Kenneth E. 2022. "Augmentation of DFIG and PMSG Wind Turbines Transient Performance Using Different Fault Current Limiters" Energies 15, no. 13: 4817. https://doi.org/10.3390/en15134817
APA StyleOkedu, K. E. (2022). Augmentation of DFIG and PMSG Wind Turbines Transient Performance Using Different Fault Current Limiters. Energies, 15(13), 4817. https://doi.org/10.3390/en15134817