
Control Strategy of Dual-Winding Motor for Vehicle Electro-Hydraulic Braking Systems



Abstract
:1. Introduction
2. Calculation of Required Current Reference of DW-PMSM for Brake Pressure Generation
2.1. Mathematical Model of DW-PMSM
2.2. Calculation of Feedforward Current Reference According to Required Brake Pressure
3. Proposed Motor Operation Method for Position Alignment of Actuator
3.1. Actuator Control Mechanism for Brake Pressure Control
3.2. Proposed Pump Piston Alignment Method
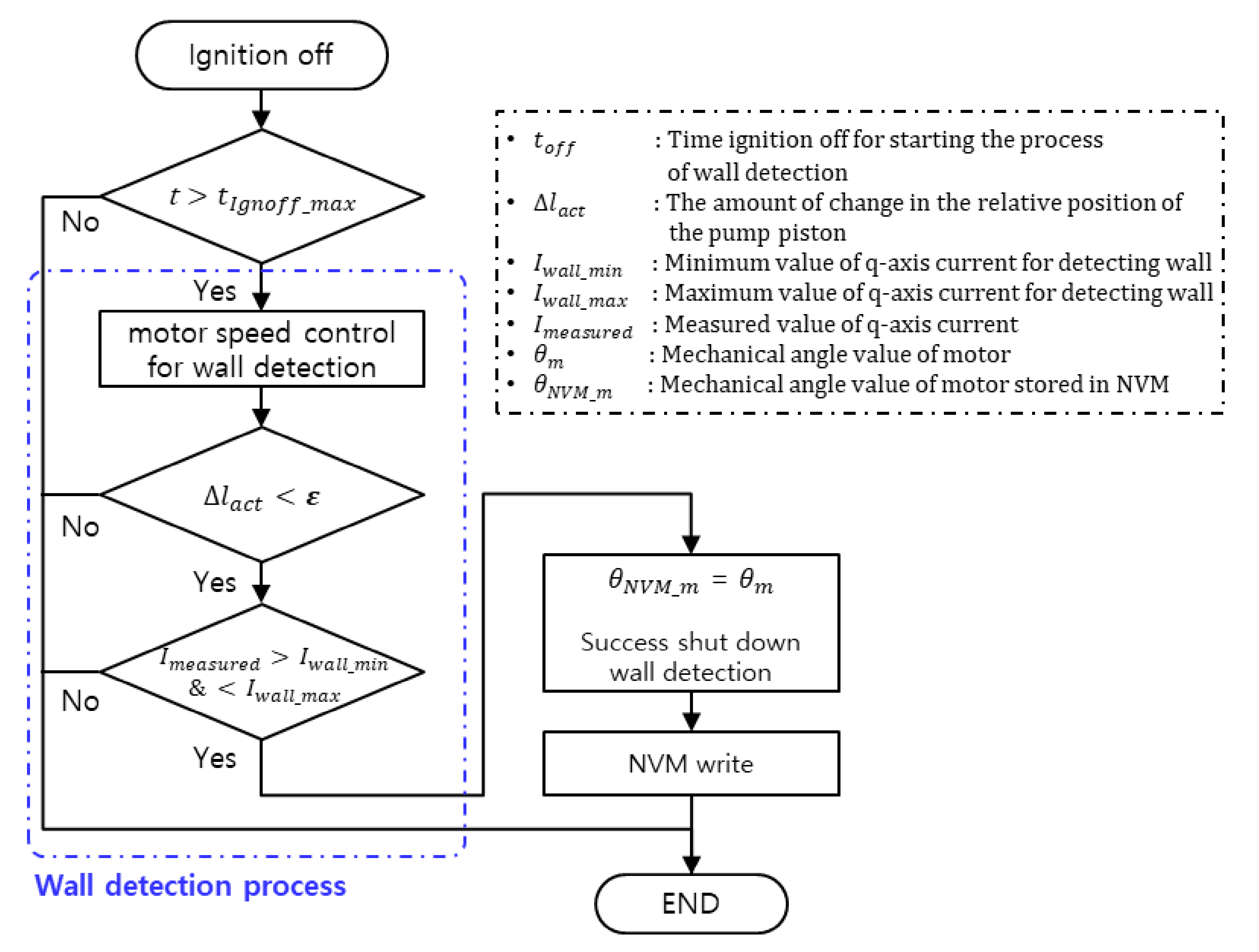
3.2.1. Wall Detection Process with the Ignition off
- After has elapsed after ignition off, only the master ECU performs motor speed control for wall detection. When the ignition is on or the driver presses the brake pedal, t is reset.
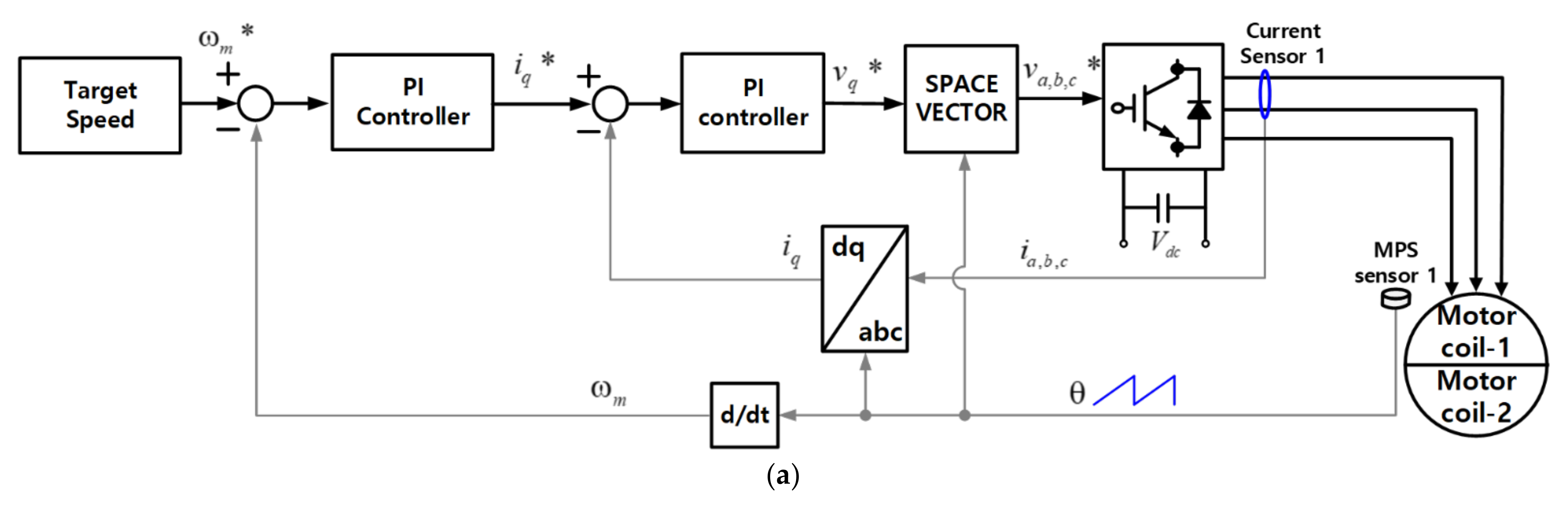
- As shown in Figure 6a, the motor speed control for wall detection maintains a constant target speed reference. The master ECU executes PI control using the current value measured by the current sensor and speed value of the motor based on the motor position sensor (MPS).
- While performing motor speed control for wall detection, if is less than the value of when the pump piston touches the rear wall, it is judged that the pump piston inside the actuator is stably in contact with the rear wall.
- When the pump piston is stably in contact with the rear wall, the value of increases by the I gain of the motor speed control for wall detection. If is between and , it is deemed that wall detection is successful.
- When wall detection is deemed to have been successfully performed, the value of is written as in the nonvolatile memory (NVM) circuit in the master ECU, and the corresponding value is maintained even when the ECU is reset.
- Once Steps 1 to 5 are completed or wall detection remains incomplete, the ECU of the EHB system is turned off.
3.2.2. Motor Initial Operation with the ECU on
- When the ECU is on, the master ECU checks the success of shutdown of wall detection through the flag stored in the NVM.
- If it is confirmed that wall detection was successful in the previous state, check whether is between and .
- If the value of is valid, setting of the position reference is performed. The master ECU sets the pump piston position to the rear wall, which allows calculation of the movement distance of the pump piston depending on the angle of rotation of the motor.
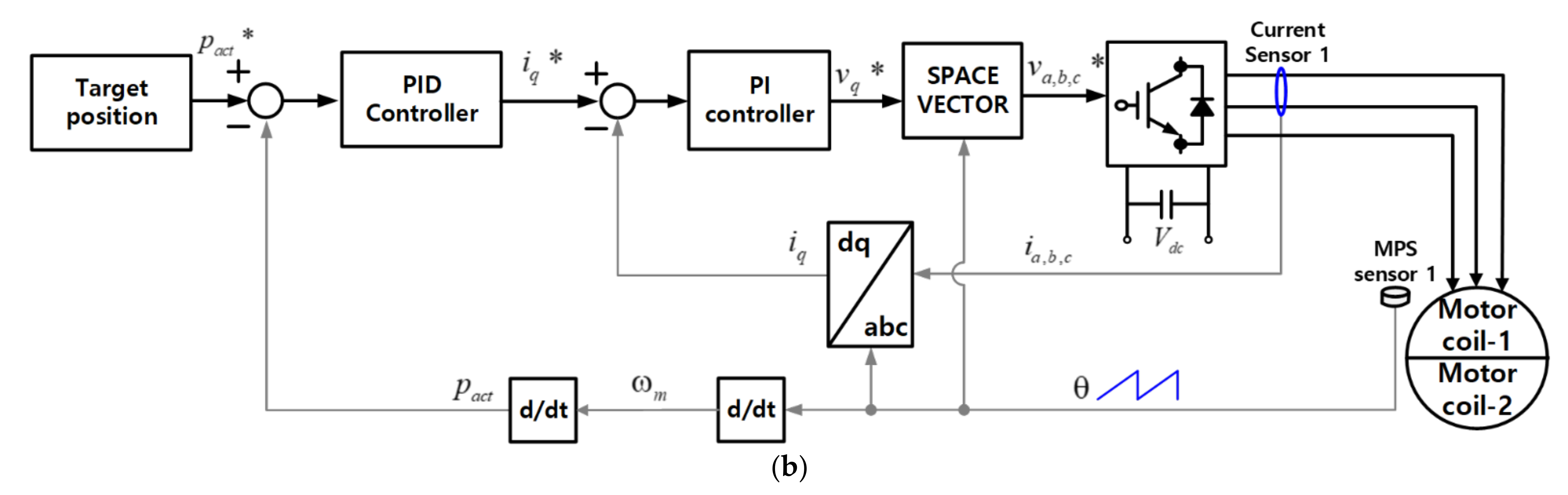
- Execute motor position control for the set origin. As shown in Figure 6b, the motor position control moves the pump piston to a stable distance from the rear wall. This is to prevent any mechanical deformation caused by the collision of the pump piston with the front and rear walls of the actuator.
- As the pump piston moves to the reference origin, check whether the value of is between and . The motor position control process is continued until the pump piston position reaches the target reference origin area.
- Check whether the measured current value of the DW-PMSM is between and . If the condition is satisfied, it is judged that the motor’s initial operation was performed successfully.
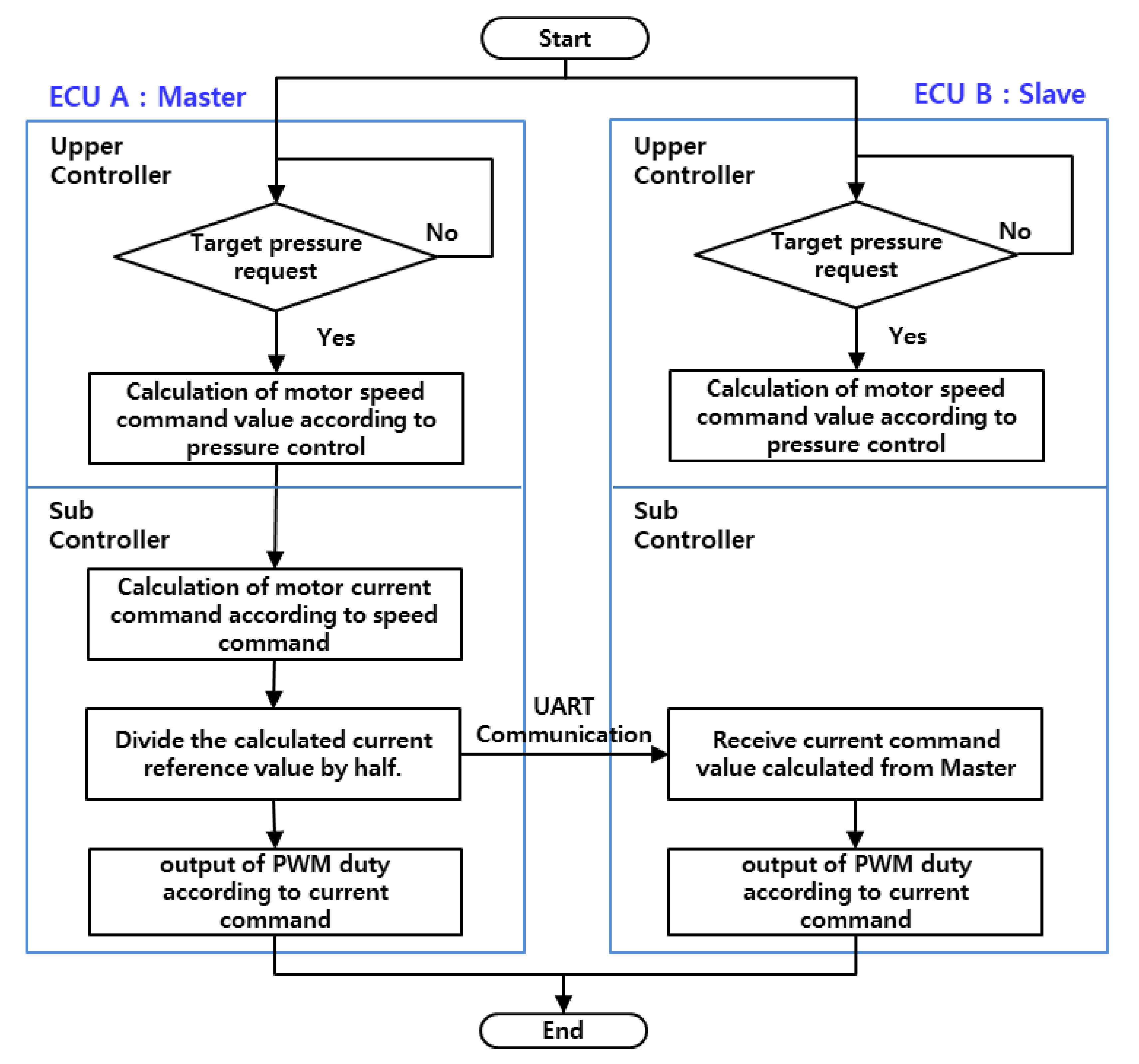
4. Proposed Control Strategy of DW-PMSM for Generating Target Brake Pressure
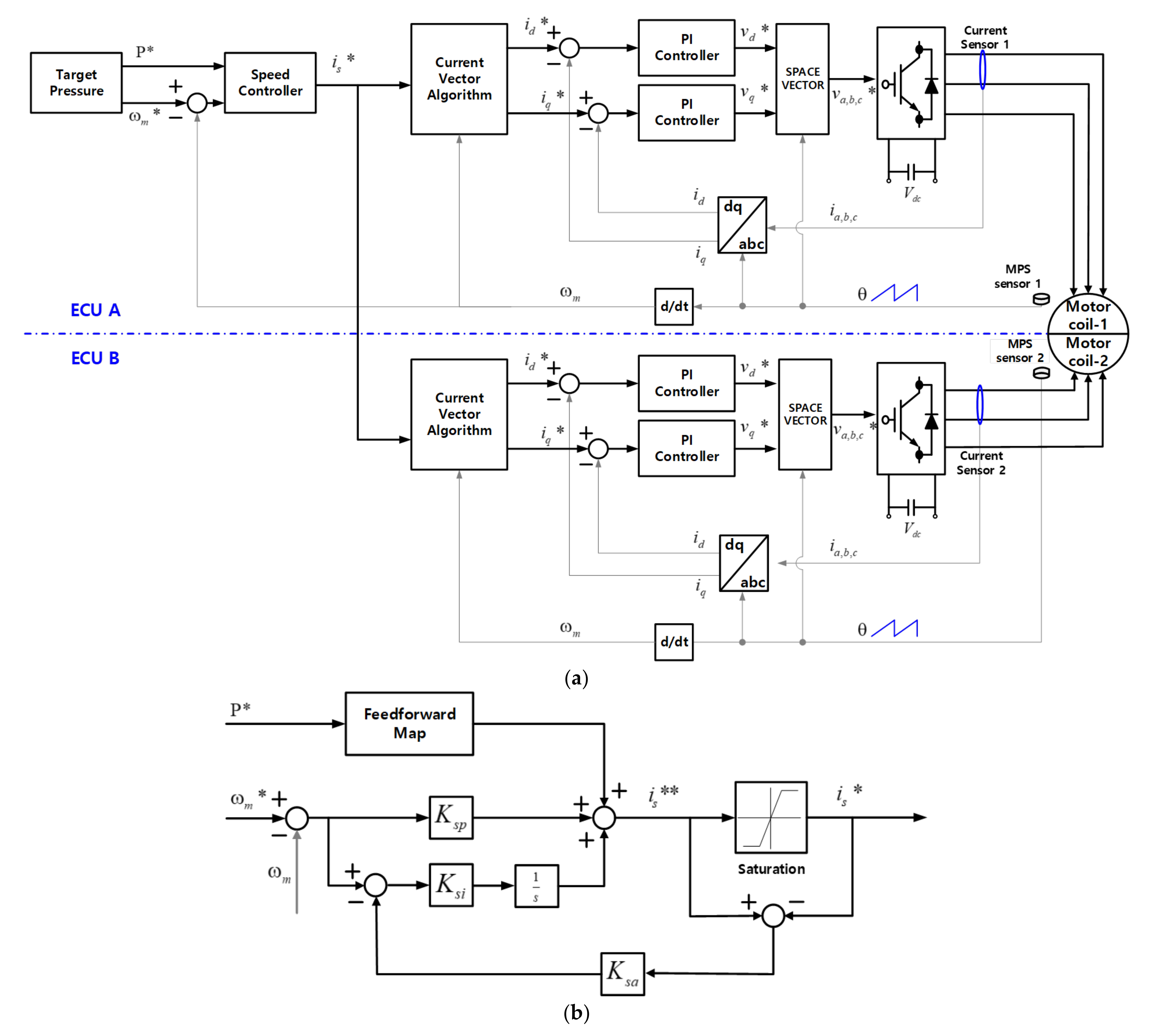
4.1. Current Motor Control Method When the EHB System Is in Normal State
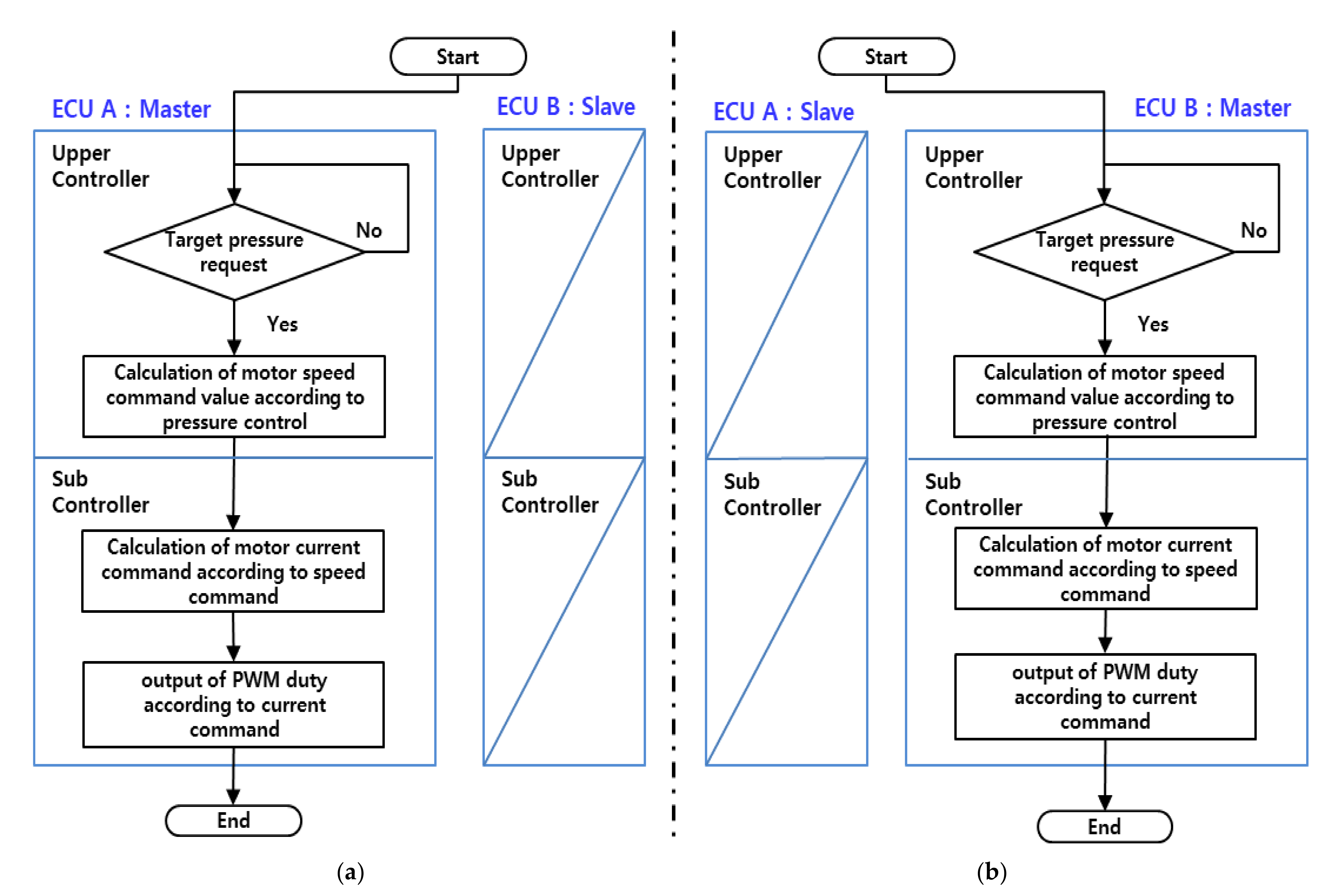
4.2. Current Motor Control Methods When the EHB System Is in A Single Fault State
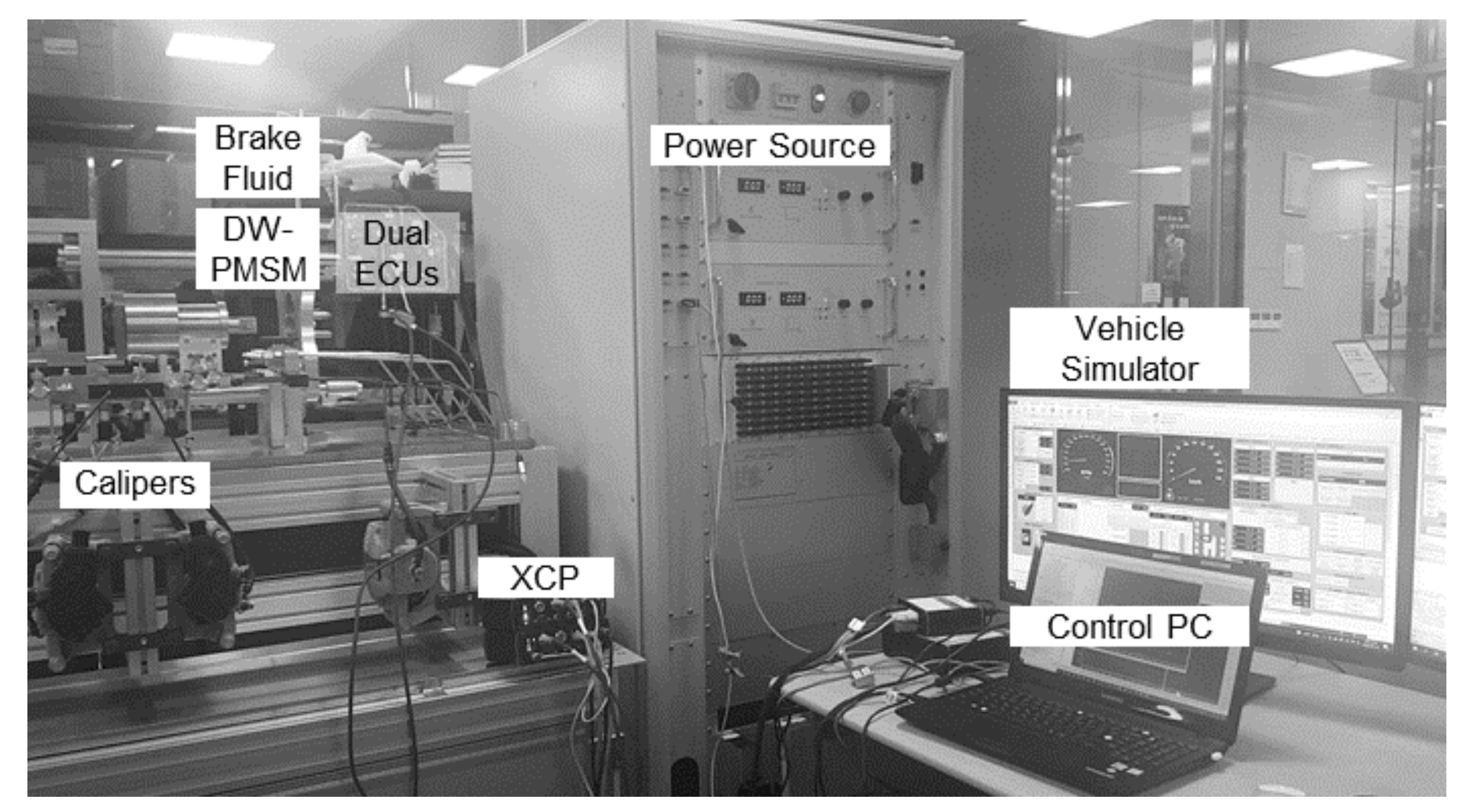
5. Experimental Verification
5.1. Test Equipment Setup and DW-PMSM Parameters
5.2. Test Results of Proposed Motor Operation Method for Position Alignment of Actuator
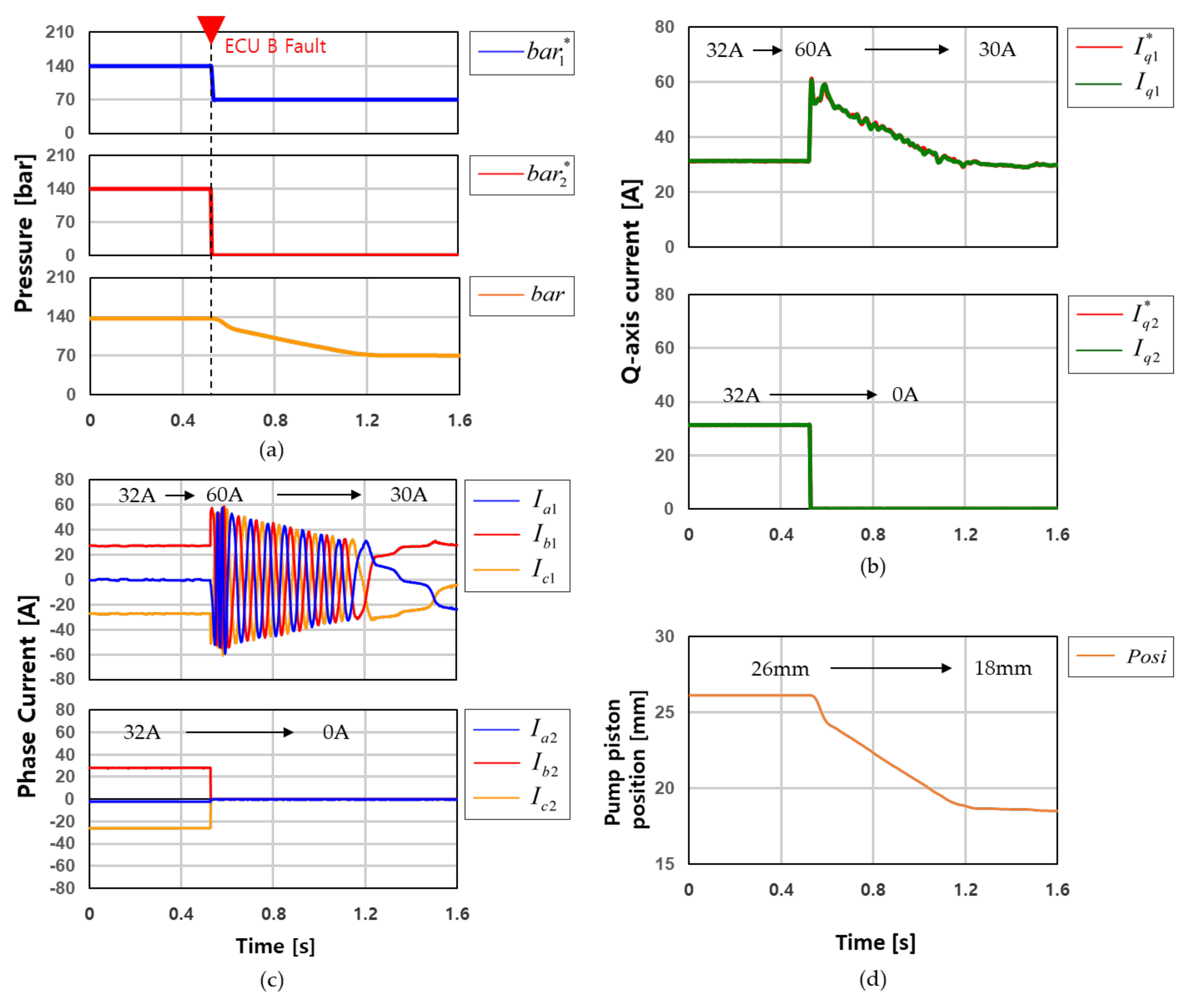
5.3. Test Results for Proposed Control Strategy of DW-PMSM for Generating Target Brake Pressure
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- ISO-26262; Road Vehicles—Functional Safety, 12-2018. ISO: Geneva, Switzerland, 2018.
- Leu, K.L.; Huang, H.; Chen, Y.Y.; Huang, L.R.; Ji, K.M. An intelligent brake-by-wire system design and analysis in accord-ance with ISO-26262 functional safety standard. In Proceedings of the 2015 International Conference on Connected Vehicles and Expo (ICCVE), Shenzen, China, 19–23 October 2015; pp. 150–156. [Google Scholar] [CrossRef]
- Wang, X.; Wu, X.; Cheng, S.; Shi, J.; Ping, X. Design and Experiment of Control Architecture and Adaptive Dual-Loop Controller for Brake-by-Wire System With an Electric Booster. IEEE Trans. Transp. Electrif. 2020, 6, 1236–1252. [Google Scholar] [CrossRef]
- Yong, J.; Gao, F.; Ding, N.; He, Y. Design and validation of an electro-hydraulic brake system using hardware-in-the-loop real-time simulation. Int. J. Autom. Technol. 2017, 18, 603–612. [Google Scholar] [CrossRef]
- Wu, J.; Zhang, H.; He, R.; Chen, P.; Chen, H. A mechatronic brake booster for electric vehicles: Design, control, and experi-ment. IEEE Trans. Veh. Technol. 2020, 69, 7040–7053. [Google Scholar] [CrossRef]
- Bogdevičius, M.; Prentkovskis, O. Engineering solutions of traffic safety problems of road transport. Transport 2004, 19, 43–50. [Google Scholar] [CrossRef] [Green Version]
- Zhao, J.; Song, D.; Zhu, B.; Chen, Z.; Sun, Y. Nonlinear backstepping control of electro-hydraulic brake system based on bond graph model. IEEE Access 2020, 8, 19100–19112. [Google Scholar] [CrossRef]
- Yang, Y.; Tang, Q.; Bolin, L.; Fu, C. Dynamic Coordinated Control for Regenerative Braking System and Anti-Lock Braking System for Electrified Vehicles Under Emergency Braking Conditions. IEEE Access 2020, 8, 172664–172677. [Google Scholar] [CrossRef]
- Tavernini, D.; Vacca, F.; Metzler, M.; Savitski, D.; Ivanov, V.; Gruber, P.; Hartavi, A.E.; Dhaens, M.; Sorniotti, A. An explicit nonlinear model predictive ABS controller for electro-hydraulic braking systems. IEEE Trans. Ind. Electron. 2020, 67, 3990–4001. [Google Scholar] [CrossRef]
- Savitski, D.; Ivanov, V.; Schleinin, D.; Augsburg, K.; Pütz, T.; Lee, C.F. Advanced control functions of decoupled elec-tro-hydraulic brake system. In Proceedings of the 2016 IEEE 14th International Workshop on Advanced Motion Control (AMC), Auckland, New Zealand, 22–24 April 2016; pp. 310–317. [Google Scholar] [CrossRef]
- D’alfio, N.; Morgando, A.; Sorniotti, A. Electro-hydraulic brake systems: Design and test through hardware-in-the-loop simulation. Veh. Syst. Dyn. 2006, 44 (Suppl. S1), 378–392. [Google Scholar] [CrossRef]
- Lin, F.; Hung, Y.; Tsai, M. Fault-tolerant control for six-phase PMSM drive system via intelligent complementary slid-ing-mode control using TSKFNN-AMF. IEEE Trans. Ind. Electron. 2013, 60, 5747–5762. [Google Scholar] [CrossRef]
- Cao, R.; Cheng, M.; Hua, W. Investigation and general design principle of a new series of complementary and modular linear FSPM motors. IEEE Trans. Ind. Electron. 2013, 60, 5436–5446. [Google Scholar] [CrossRef]
- Jiang, X.; Huang, W.; Cao, R.; Hao, Z.; Jiang, W. Electric drive system of dual-winding fault-tolerant permanent-magnet motor for aerospace applications. IEEE Trans. Ind. Electron. 2015, 62, 7322–7330. [Google Scholar] [CrossRef]
- Chen, X.; Wang, J.; Patel, V.I. A generic approach to reduction of magnetomotive force harmonics in permanent-magnet machines with concentrated multiple three-phase windings. IEEE Trans. Magn. 2014, 50, 1–4. [Google Scholar] [CrossRef]
- Wang, S.; Zhu, Z.; Pride, A.; Shi, J.; Deodhar, R.; Umemura, C. Comparison of different winding configurations for dual three-phase interior PM machines in electric vehicles. World Electr. Veh. J. 2022, 13, 51. [Google Scholar] [CrossRef]
- Barcaro, M.; Bianchi, N.; Magnussen, F. Faulty operations of a PM fractional-slot machine with a dual three-phase winding. IEEE Trans. Ind. Electron. 2011, 58, 3825–3832. [Google Scholar] [CrossRef]
- Abdel-Khalik, A.S.; Ahmed, S.; Massoud, A.M. Effect of multilayer windings with different stator winding connections on interior PM machines for EV applications. IEEE Trans. Magn. 2016, 52, 1–7. [Google Scholar] [CrossRef]
- Xu, P.; Feng, J.H.; Guo, S.Y.; Feng, S.; Chu, W.; Ren, Y.; Zhu, Z.Q. Analysis of dual three-phase permanent-magnet synchronous machines with different angle displacements. IEEE Trans. Ind. Electron. 2018, 65, 1941–1954. [Google Scholar] [CrossRef]
- Barcaro, M.; Bianchi, N.; Magnussen, F. Analysis and tests of a dual three-phase 12-slot 10-pole permanent-magnet motor. IEEE Trans. Ind. Appl. 2010, 46, 2355–2362. [Google Scholar] [CrossRef]
- Zhongxun, W.; Zhonghua, D. The research of LVDT nonlinearity data compensation based on RBF neural network. In Proceedings of the 2008 7th World Congress on Intelligent Control and Automation, Chongqing, China, 25–27 June 2008; pp. 4591–4594. [Google Scholar] [CrossRef]
- Gunasekaran, V.; George, B.; Aniruddhan, S.; Janardhanan, D.D.; Palur, R.V. Performance analysis of oscillator-based read-out circuit for LVDT. IEEE Trans. Instrum. Meas. 2019, 68, 1080–1088. [Google Scholar] [CrossRef]
- Krause, P.C.; Wasynczuk, O.; Sudhoff, S.D.; Pekarek, S.D. Pekarek Analysis of Electric Machinery and Drive Systems; John Wiley and Sons: Hoboken, NJ, USA, 2013; p. 680. [Google Scholar]
- Demir, Y.; Aydin, M. A novel dual three-phase permanent magnet synchronous motor with asymmetric stator winding. IEEE Trans. Magn. 2016, 52, 1–5. [Google Scholar] [CrossRef]
- Singh, G.K.; Nam, K.; Lim, S.K. A simple indirect field-oriented control scheme for multiphase induction machine. IEEE Trans. Ind. Electron. 2005, 52, 1177–1184. [Google Scholar] [CrossRef]
- Hu, Y.; Zhu, Z.Q.; Odavic, M. Comparison of two-individual current control and vector space decomposition control for dual three-phase PMSM. IEEE Trans. Ind. Appl. 2017, 53, 4483–4492. [Google Scholar] [CrossRef]
- Yin, S.; Xiao, B.; Ding, S.X.; Zhou, D. A review on recent development of spacecraft attitude fault tolerant control system. IEEE Trans. Ind. Electron. 2016, 63, 3311–3320. [Google Scholar] [CrossRef]
- Yang, C.; Peng, T.; Yang, X.; Gui, W. A fault-injection strategy for traction drive control systems. IEEE Trans. Ind. Electron. 2017, 64, 5719–5727. [Google Scholar] [CrossRef]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter Name | Value |
|---|---|
| Resistance () | 0.023 |
| d-axis self-inductance (mH) | 0.078 |
| q-axis self-inductance (mH) | 0.079 |
| Flux linkage (Wb) | 0.0055 |
| DC link voltage (V) | 13 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jo, T.; Joo, K.; Lee, J. Control Strategy of Dual-Winding Motor for Vehicle Electro-Hydraulic Braking Systems. Energies 2022, 15, 5090. https://doi.org/10.3390/en15145090
Jo T, Joo K, Lee J. Control Strategy of Dual-Winding Motor for Vehicle Electro-Hydraulic Braking Systems. Energies. 2022; 15(14):5090. https://doi.org/10.3390/en15145090
Chicago/Turabian StyleJo, Taeho, Kyoungjin Joo, and Ju Lee. 2022. "Control Strategy of Dual-Winding Motor for Vehicle Electro-Hydraulic Braking Systems" Energies 15, no. 14: 5090. https://doi.org/10.3390/en15145090
APA StyleJo, T., Joo, K., & Lee, J. (2022). Control Strategy of Dual-Winding Motor for Vehicle Electro-Hydraulic Braking Systems. Energies, 15(14), 5090. https://doi.org/10.3390/en15145090