1. Introduction
With the merits of simple structure, easy control, fast transient response, and high efficiency, permanent magnet brushless DC (PM BLDC) motors have been widely used in different areas and applications, such as electric vehicles, energy storage flywheels, robots, household appliances, etc. [
1,
2,
3,
4,
5,
6,
7]. However, with the increasing requirements of energy efficiency and high performance of equipment, conventional PM BLDC motors cannot meet the demands of high efficiency and high torque density any longer [
8,
9]. The lightweight ironless PM BLDC motor eliminates the stator iron loss and, therefore, has a great potential in torque density improvement [
10,
11,
12]. Additionally, in order to obtain the maximum output torque, the back electromagnetic force (back-EMF) waveform of the PM BLDC motor should be square or rectangular [
13,
14]. However, it is found that the back-EMF waveform of the designed ironless BLDC motor is much more sinusoidal in practice [
15]. It has been proved in [
16] that, in conditions of the same ideal square wave input currents and same back-EMF amplitudes, the electromagnetic torque with square back-EMF waveform is 15.5% higher than that with sinusoidal waveforms. This indicates that the more trapezoidal degree the back-EMF has, the higher the load torque will be, and the lower the resulting torque ripple.
In [
15,
17], it is highlighted that, due to the nonideality of magnetic material, design considerations, and manufacturing limitations, the real back-EMF waveform is not exactly trapezoidal, which deteriorates the electromagnetic torque. The trapezoidal degree of back-EMF can be obtained through different control strategies [
15,
17,
18,
19,
20,
21,
22,
23,
24]. In [
15], a phase current injection method is proposed to compensate for the nonideal back-EMF. In [
17], a current optimization control method is proposed to reduce the torque ripple of PM BLDC motors, which is caused by the nonideal trapezoidal back-EMF. It is declared in [
22] that the torque ripple can be reduced by the optimization of the phase rectification error, which is not inevitable in motor sensorless control. In [
23], an average torque control strategy with a single period is proposed to minimize the torque ripple, and back-EMF is nonideal. In [
24], a second-order sensorless control strategy for a BLDC motor system with low inductance and nonideal back-EMF is adopted to improve the reliability of current commutation during high-speed operation and reduce the power consumption of high-speed steady-state operation. In [
13], the PM thickness and migration angle of a double-layer brushless DC motor are optimized to make the back-EMF waveform of the inside and outside stator winding consistent with each other, and the torque ripple is decreased dramatically. The electromagnetic torque performance of the PM BLDC motor can be improved with some adopted control strategies. However, it will increase the complexity of the motor control system.
As is known, the back-EMF waveform depends directly on the magnetic field distribution in the coil region, which is excited from the rotor PMs. Thus, trapezoidal back-EMF can be obtained through PM segmentation with different magnetic field intensities. However, to the best of the authors’ knowledge, few papers focus on this aspect [
2,
25,
26]. In [
27], a method for the comprehensive optimal design of a slotless PM BLDC motor with surface-mounted magnets is proposed, to find the optimal geometries of the assumed motor. In [
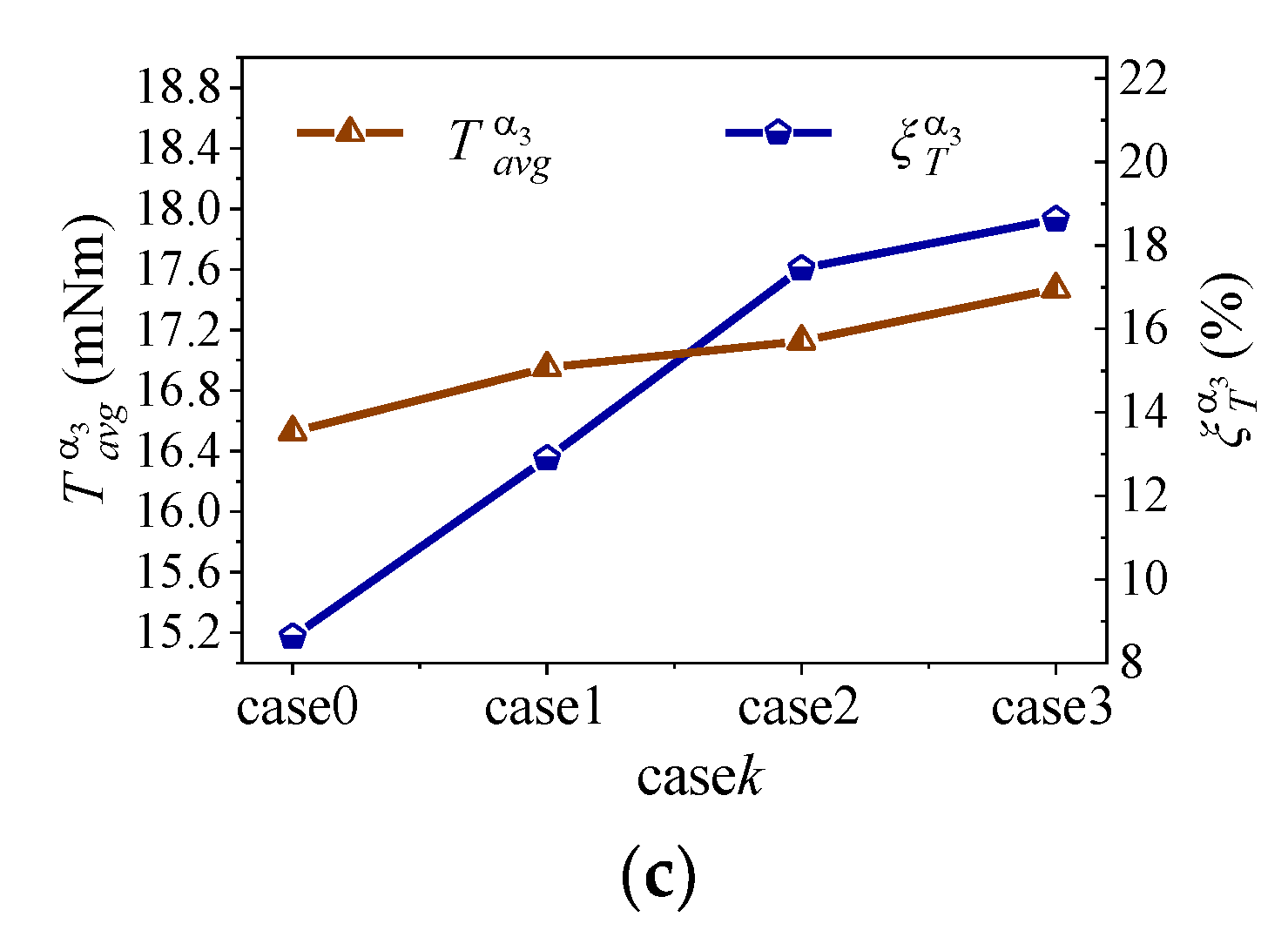
28], the dynamic response of a BLDC motor is determined using artificial intelligence, which provides guidance for multiparameter optimization of electromagnetic torque improvement. In this paper, a method for improving the back-EMF trapezoidal degree by PM’s different segmentation types is proposed. Additionally, in order to keep the amplitude of the back-EMF constant, the combination of different intensities of PM magnetization is adopted. Firstly, the modeling of the ironless BLDC motor and PMs with symmetrical and asymmetrical segments are established. Secondly, the cases with the same back-EMF amplitudes are calculated through a two-dimensional finite element method (2-D FEM) multiobjective optimization. Thirdly, the change percentages of the electromagnetic torque with the back-EMF trapezoidal degree, relative to PMs without segments, are investigated. Finally, two ironless BLDC motor prototypes, one with PMs symmetrically segmented into three segments and the other without segments, are manufactured and tested to validate the simulated results.
2. Modeling
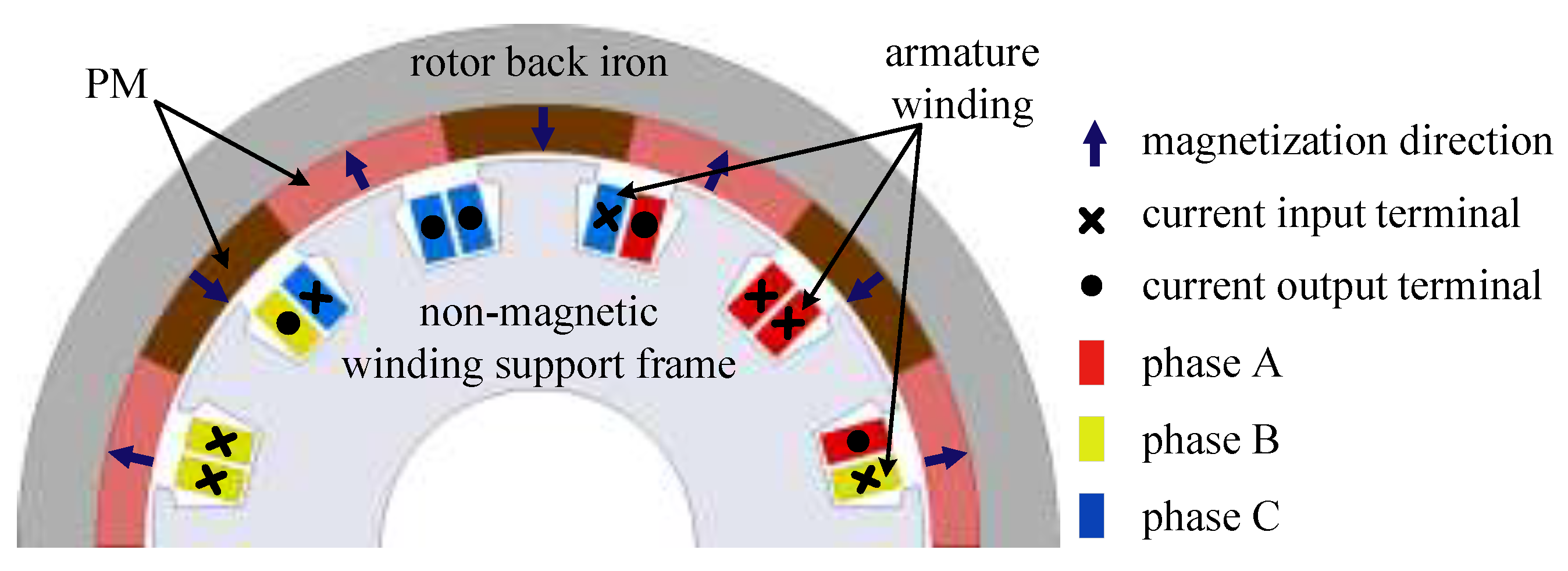
The 14-pole and 12-slot ironless BLDC motor equipped with an outer rotor is presented in
Figure 1. And the specifications of all the symbols used in this paper, are tabulated in Nomenclature. The winding support frame is made of nonmagnetic material, such as epoxy resin or polyimide to reduce the weight. Additionally, the stator iron loss is eliminated, which is beneficial for torque density improvement. As the slot number per pole per phase is 2/7, concentrated windings with all teeth wounded were adopted. The outer rotor structure provides higher inertia than the inner rotor configuration under the same conditions. Additionally, it can be easily connected with external interfaces. The main magnetic field is excited by PMs. The solid arrows on the PMs show the corresponding radial magnetizing direction. As evident, the magnetization directions of each adjacent two PMs are inverse with each other. The embrace equals 1, which means the inner side of the rotor back iron is covered by PMs.
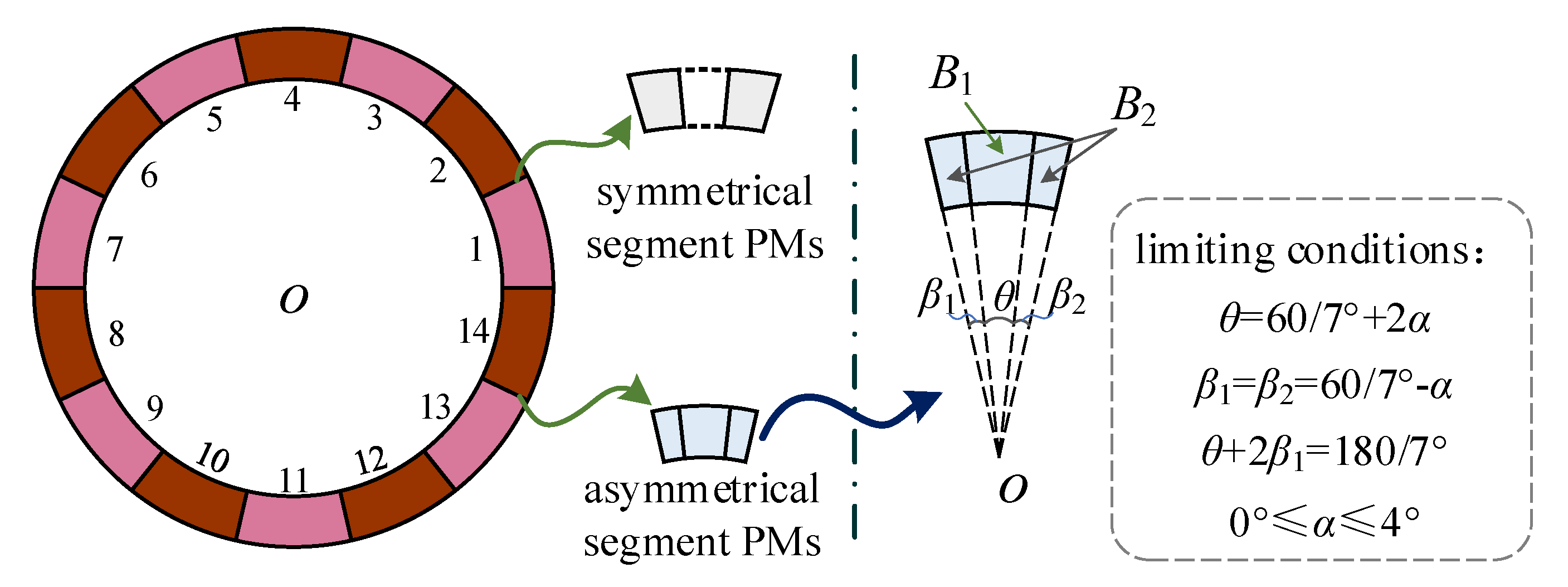
In order to obtain trapezoidal back-EMF, PMs were segmented symmetrically and asymmetrically, as illustrated in
Figure 2. For the case of PMs segmented symmetrically, PMs were segmented into several equal sub-PMs. Here, the number of the symmetrically segmented PMs is denoted as 2
k + 1 (
k = 1, 2, 3). The sum of the sub-PM center angles is π/
p. The remanence of the middle PM (mid-PM for short) is recorded as
B1, and then taking the mid-PM as a reference, the remanence of the left or right side PMs (side-PMs for short) is denoted as
B2,
B3, …,
Bk (
k = 2, 3, 4) in sequence. The remanences of the side-PMs at the symmetric position are consistent with each other. While for the other case of PMs segmented asymmetrically, PMs were segmented into three sub-PMs. The central angle of the middle PM is set as
θ, and that of the sub-PMs on both sides is assumed as
β1 and
β2, respectively. As shown in
Figure 1, the inner side of the outer rotor is full of PMs without segmentations. Hence, restricted conditions were made to keep the embrace of PMs segmented into several sub-PMs to be 1. For symmetrically segmented PMs,
θ =
β1 =
β2 = 60/7°, while for those with asymmetrical segmentation,
β1 =
β2 = 60/7°−
α,
θ = 60/7 + 2
α. Additionally, the varied range of
α is (0°, 4°).
It should be noted that the magnetization intensity for the case of PMs segmented symmetrically is the same for all the segmented sub-PMs. However, for the case of PMs segmented asymmetrically, the remanence of the mid-PM and side-PMs are defined as B1 and B2 (B1 ≠ B2), respectively.
5. Discussion
PM segmentation is often used to restrain PM eddy current loss for high-speed PM motors. The ironless PM BLDC motor investigated in this paper is an outer rotor type, which indicates the outer rotor core can compensate for the heavy centrifugal force of the PMs mounted in the inner surface of the outer rotor core. As proved in [
16], the electromagnetic force can be improved 15.5% with trapezoidal back-EMF, compared with sinusoidal back-EMF. Hence, the effect of PM segmentations with different magnetic intensities on no-load back-EMF and load torque improvement was studied.
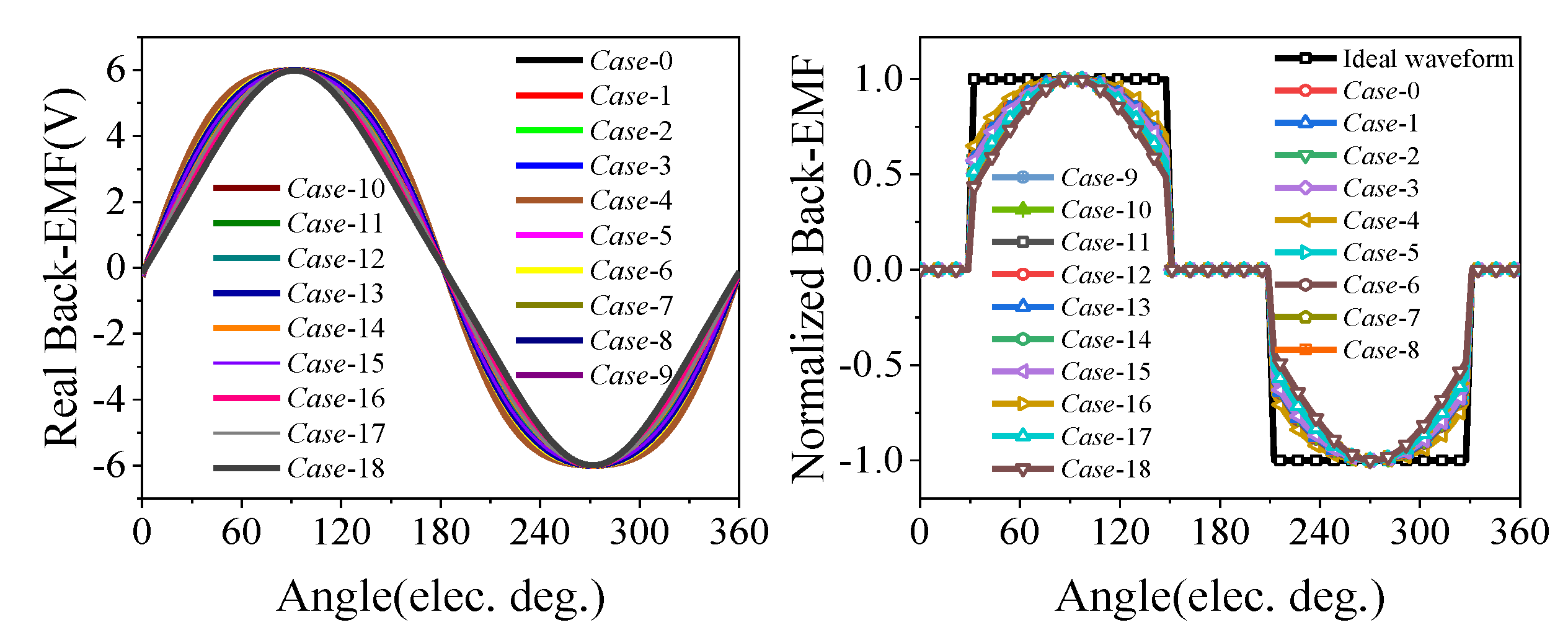
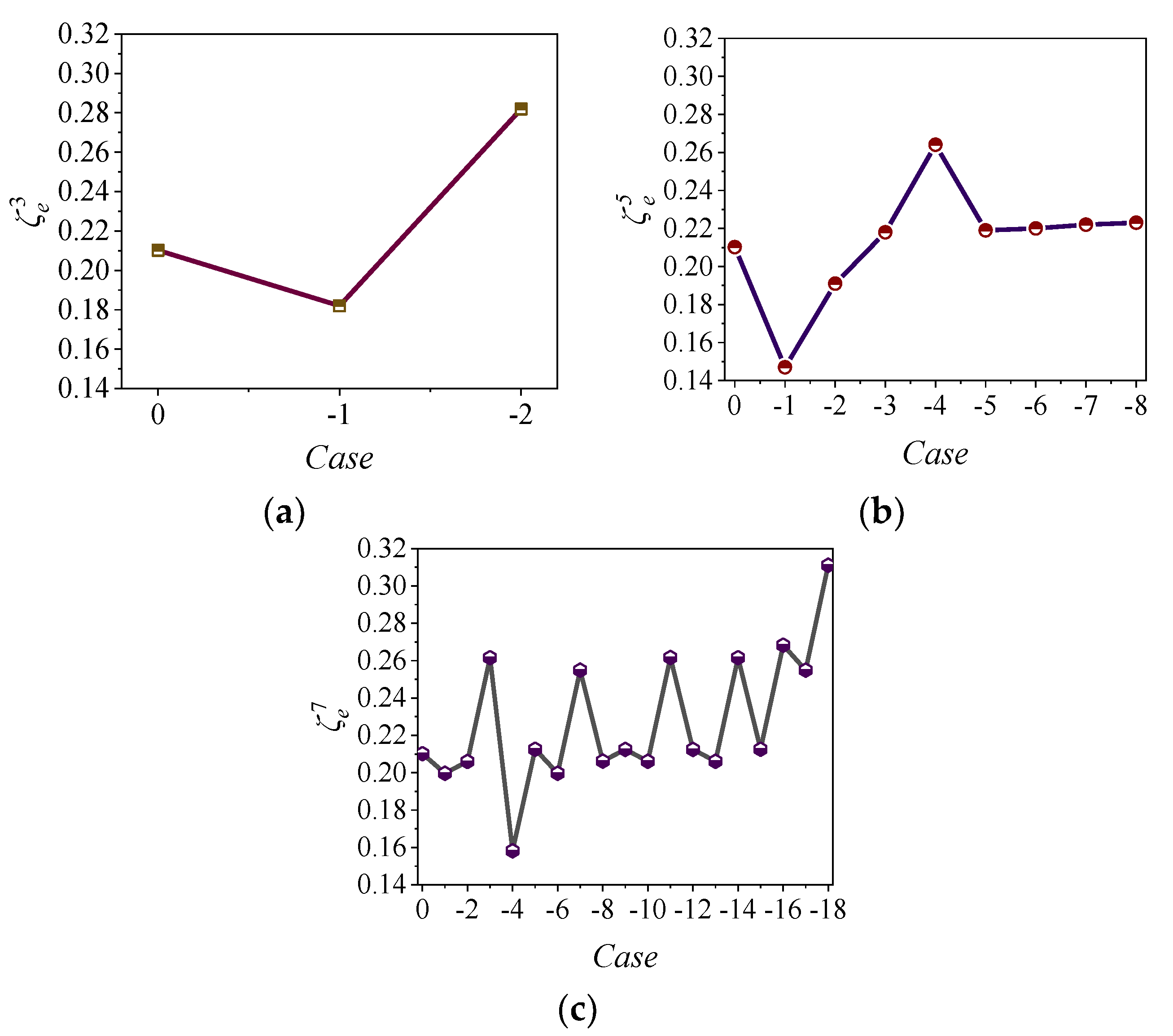
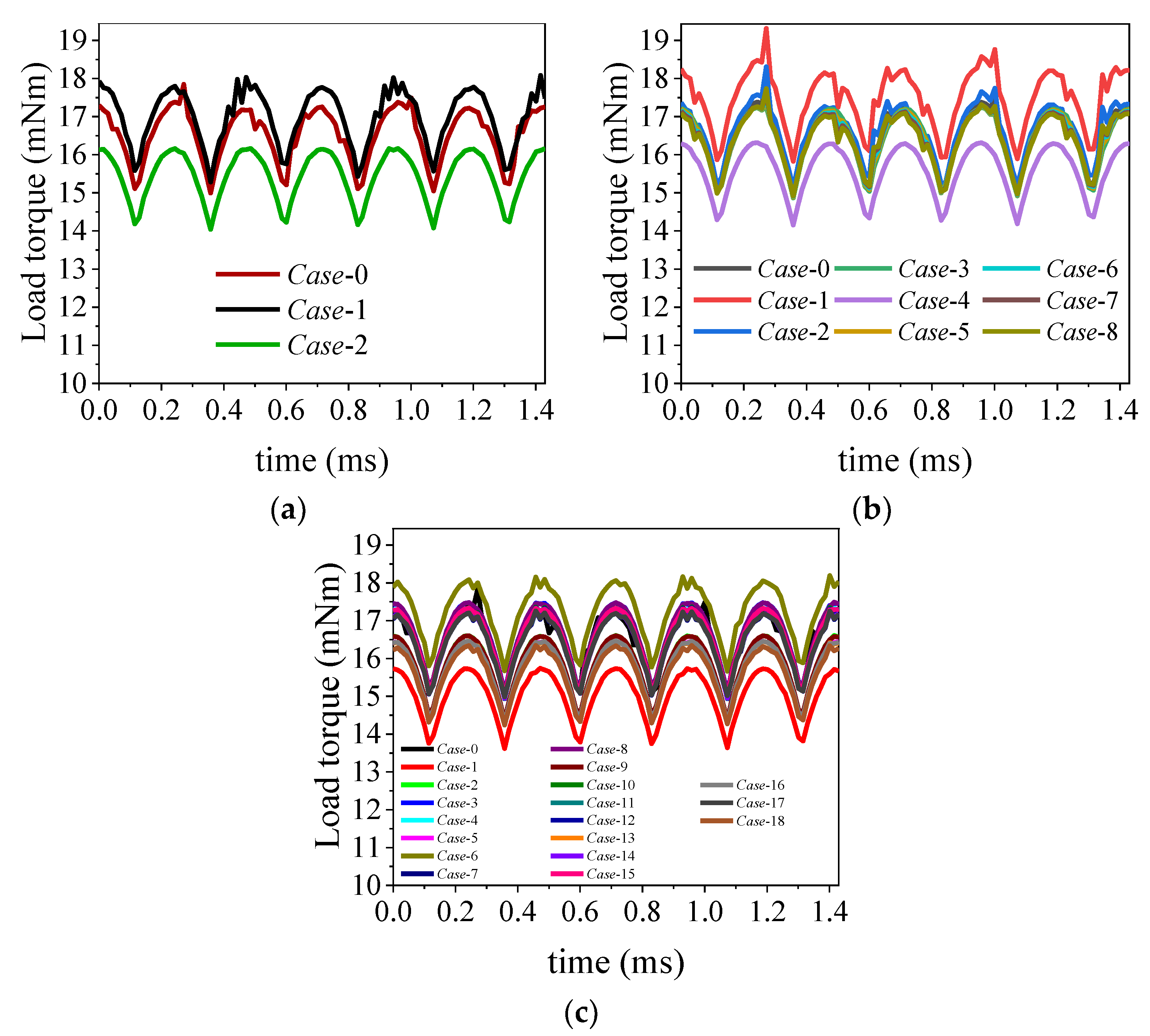
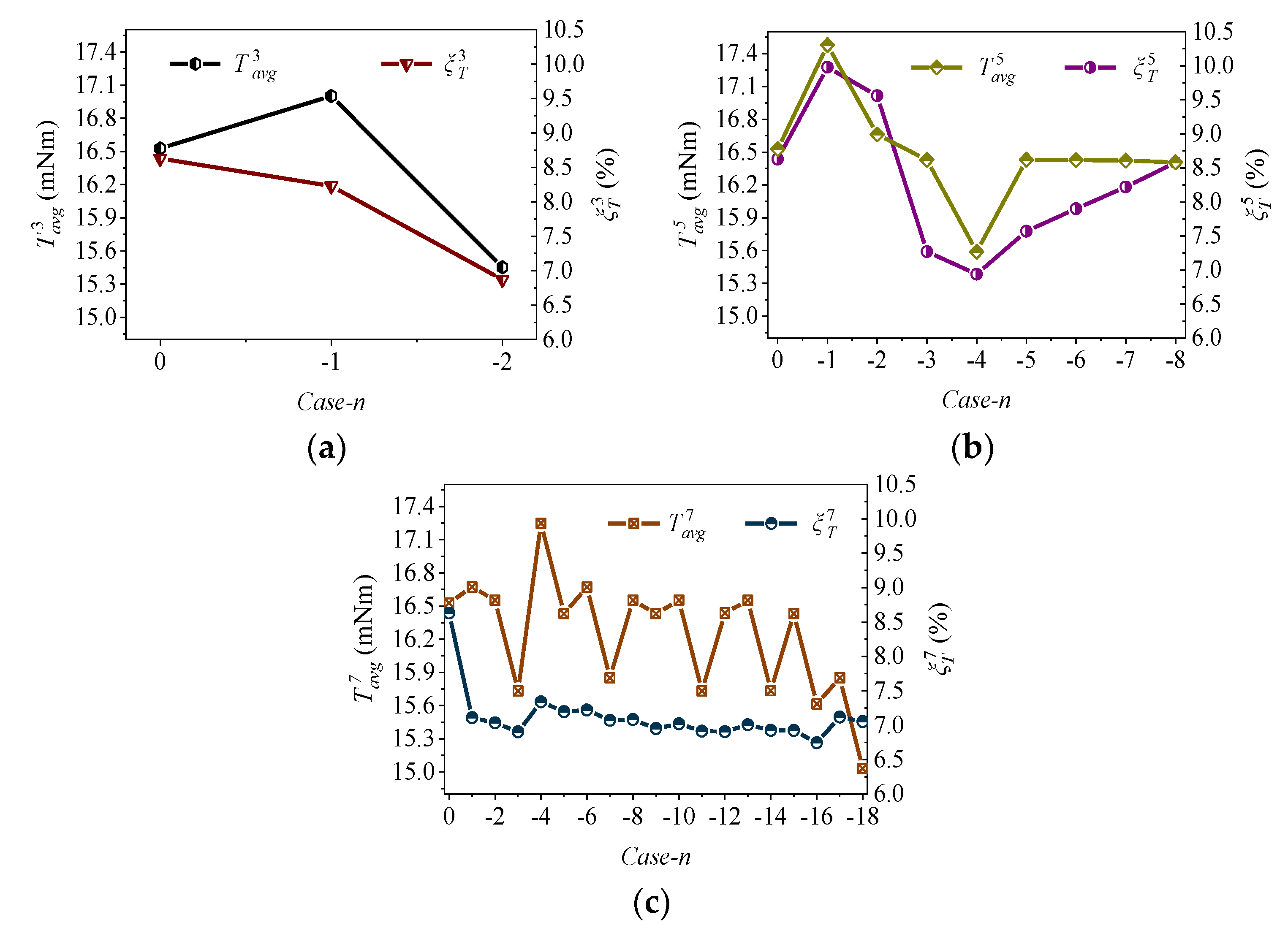
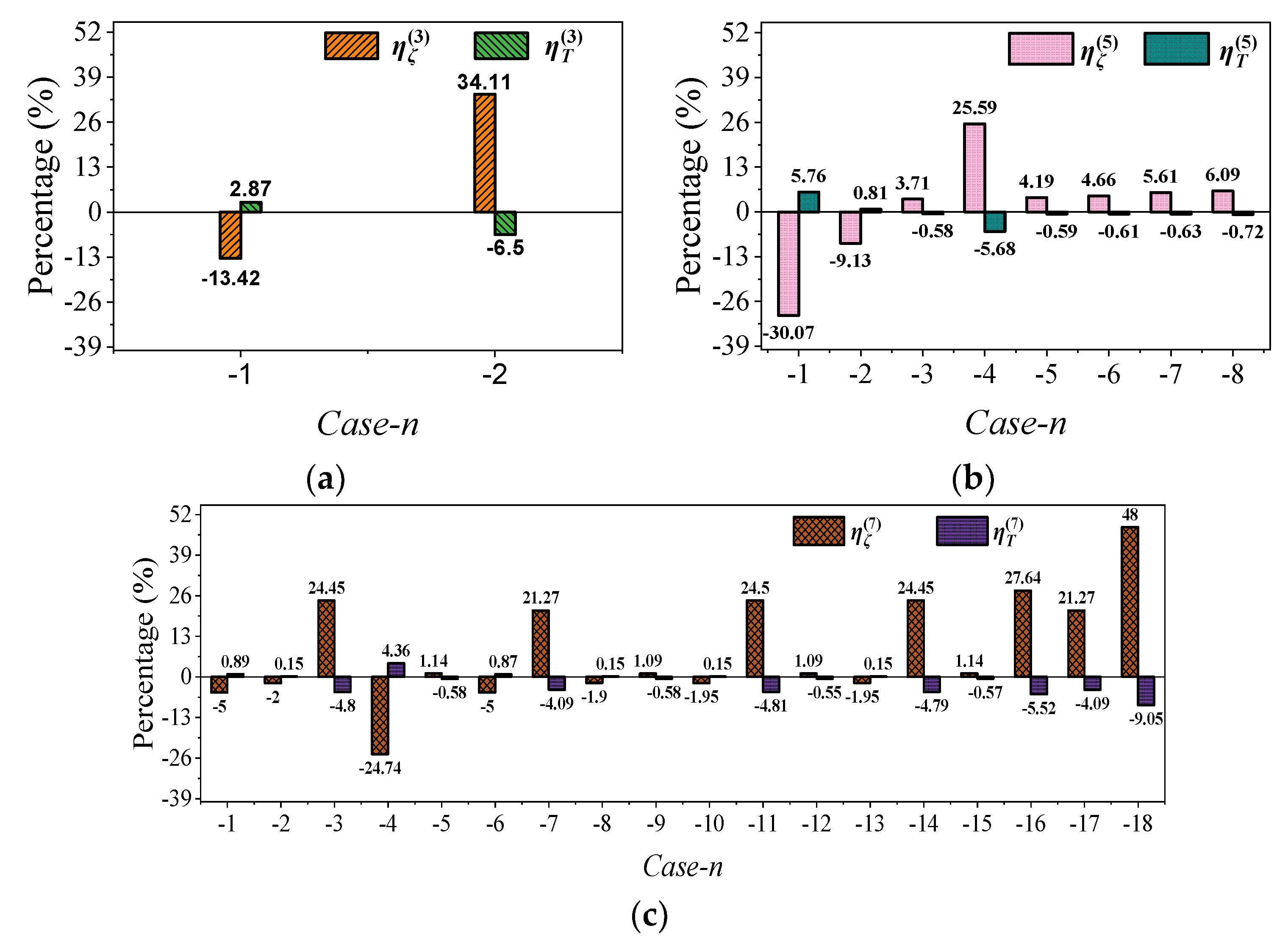
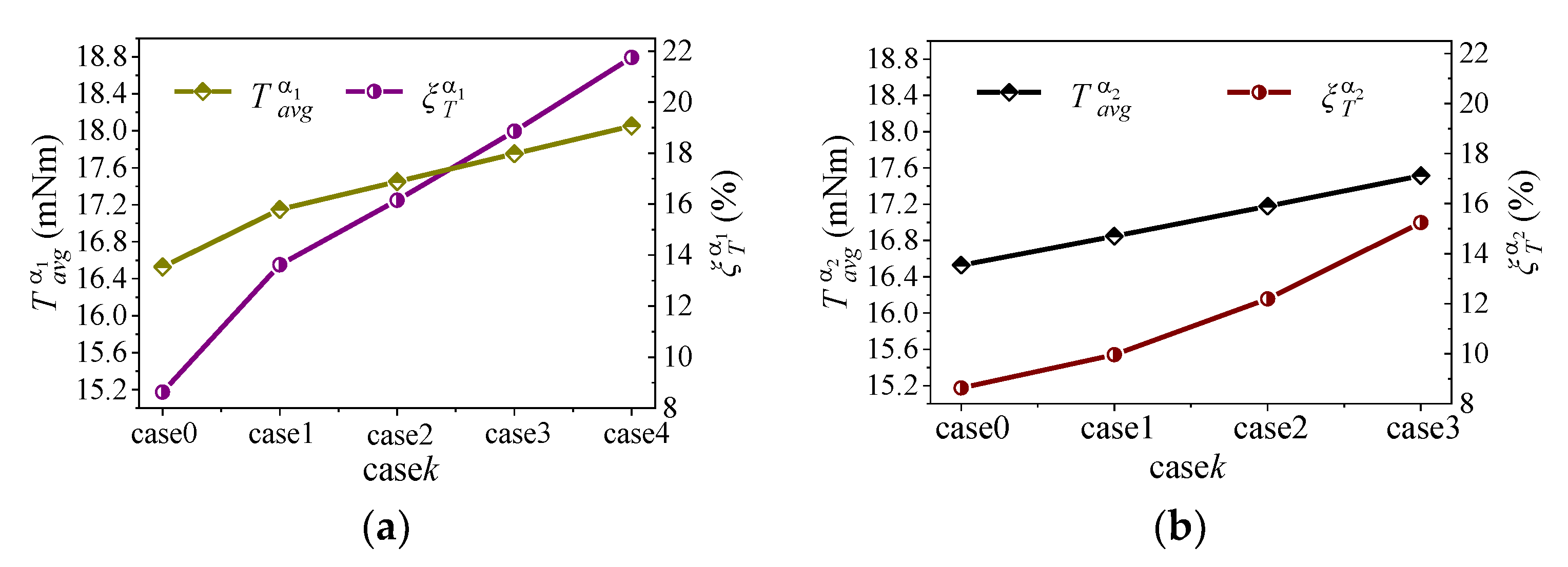
As for PM symmetrical segmentations, the minimum evaluation factor (as shown in Equation (1)) for PMs segmented into three, five, and seven segments, are 0.182, 0.157, and 0.1582, respectively. It should be noted that the smaller the evaluation factor is, the better the trapezoidal degree of the back-EMF. However, the restricted condition for the extracted
Cases of PM segment into seven segments is much stricter than the other two segment types. However, it seems that the trapezoidal degree of PMs segmented into five segments present better results than that of PMs segmented into seven segments. Likewise, the load torque is presented in
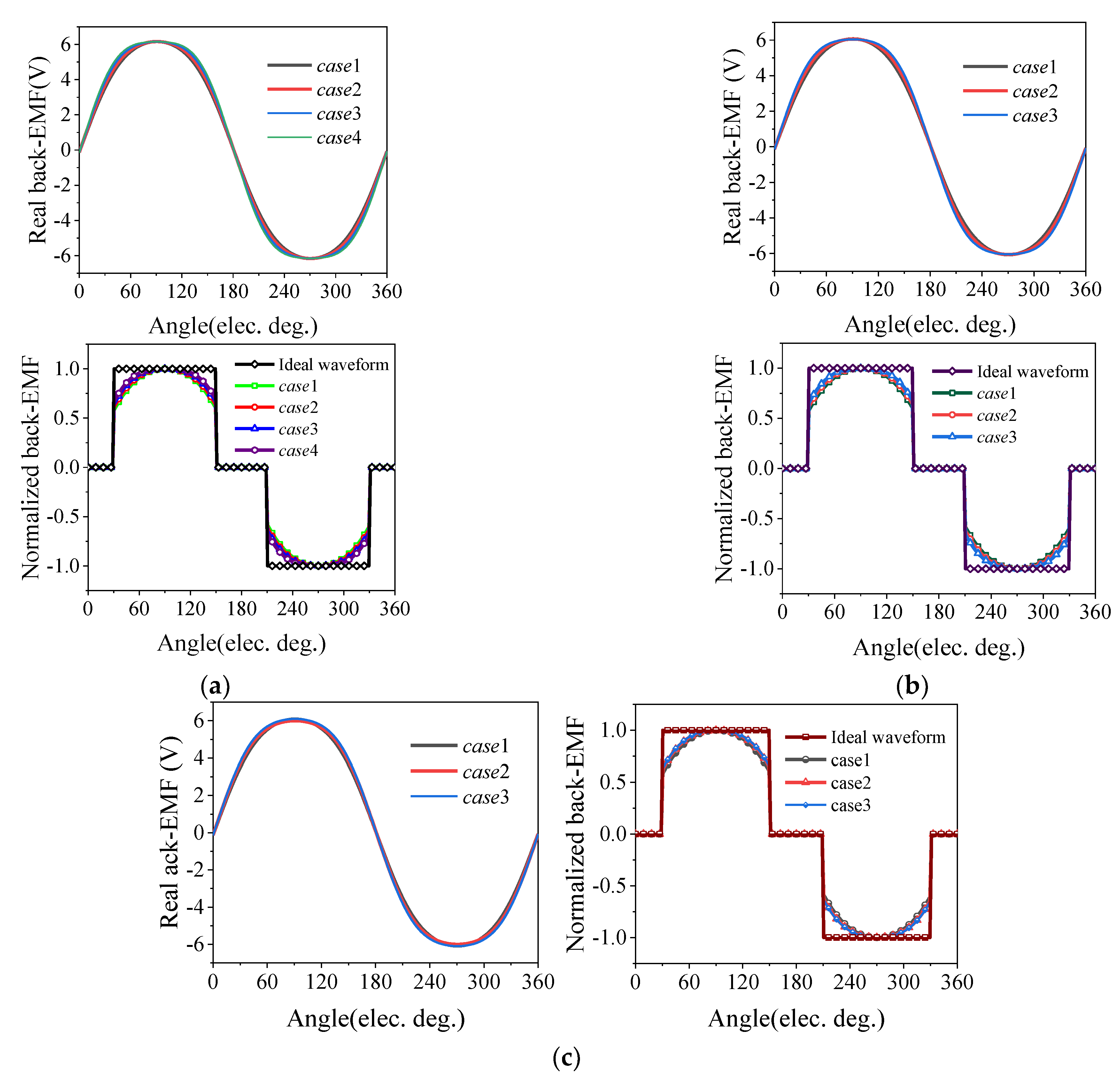
Section 4.1. Considering the different deviation set for different PM symmetrical segmentations, it can be concluded that trapezoidal back-EMF can be easier obtained with the increase in the number of PM symmetrical segments.
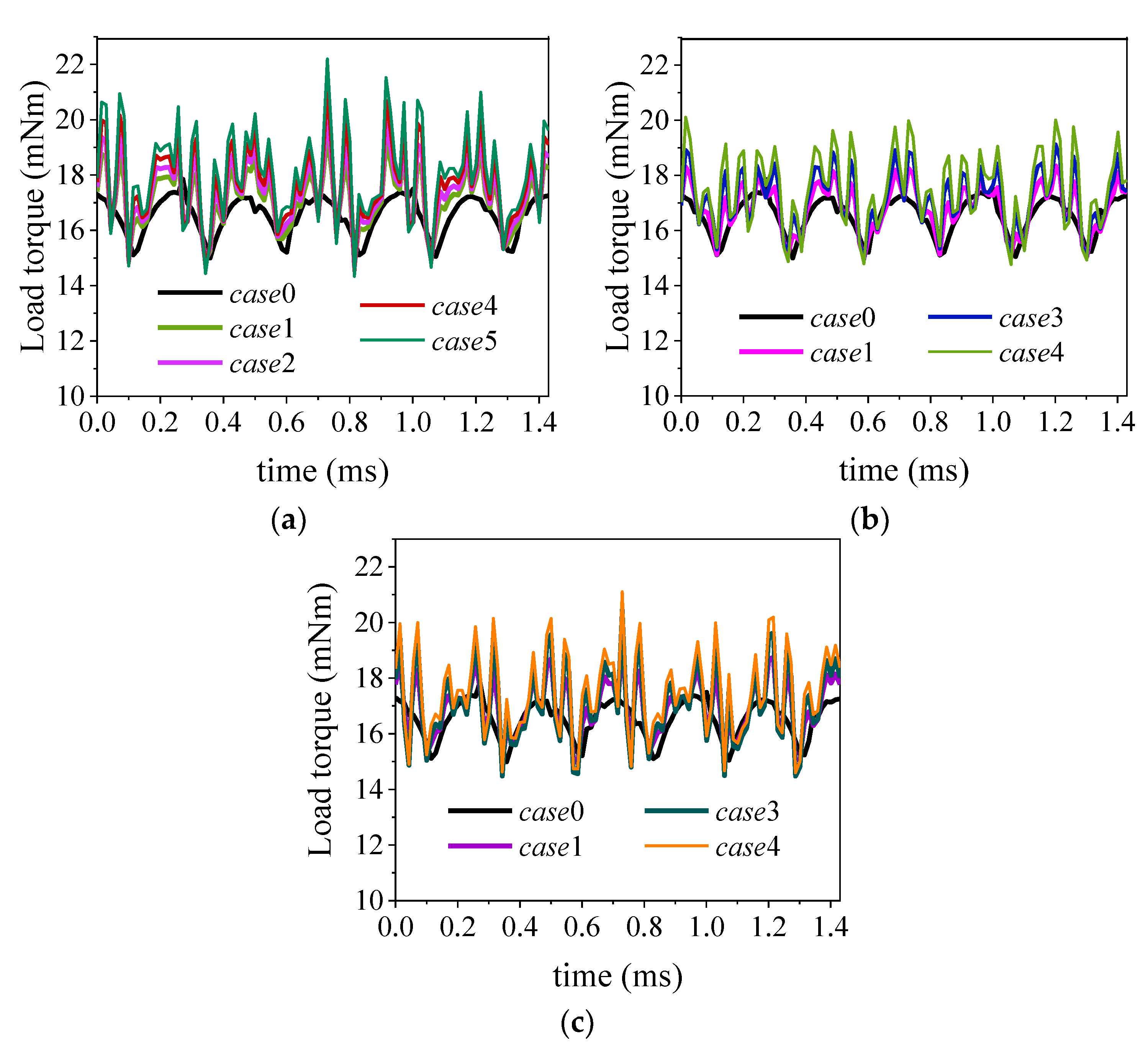
From the comprehensive analysis of the results, it can be found that PM asymmetrical segmentations show better results in back-EMF and load torque performance. In this paper, the load torque for PMs asymmetrical segmentation showed 60% higher than that of PM symmetrical segmentations.
Compared with monoblock PM, segment processing may deteriorate the strength, especially with high rotational speed. However, under the protection of the outer rotor core, the situation of segmented PMs may be well. As for the inner rotor with surface-mounted PMs, well-behaved sleeves or other protective procedures for the PMs should be mounted on the PMs. The effect of PM trapezoidal magnetization on electromagnetic performance may be carried out in future works.
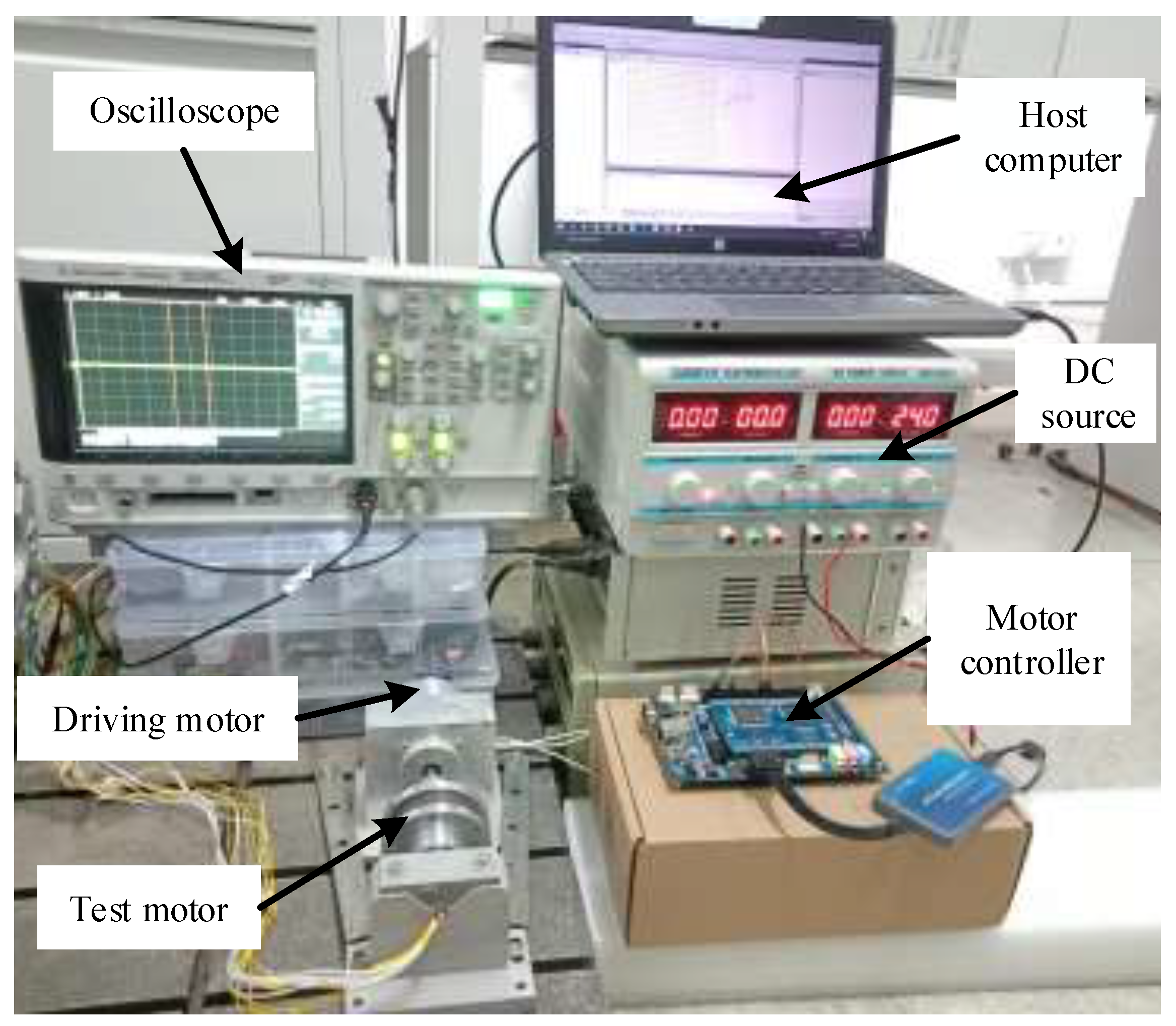
6. Experiment
For the sake of validating the viability of the proposed method, and the correctness of the results, two ironless PM BLDC motor prototypes were manufactured and tested. One of the prototypes was without segmentation, while the other was with PMs symmetrically segmented into 3 segments. Additionally, the magnetic field intensity of the segmented sub-PMs corresponds to
Case-2 in
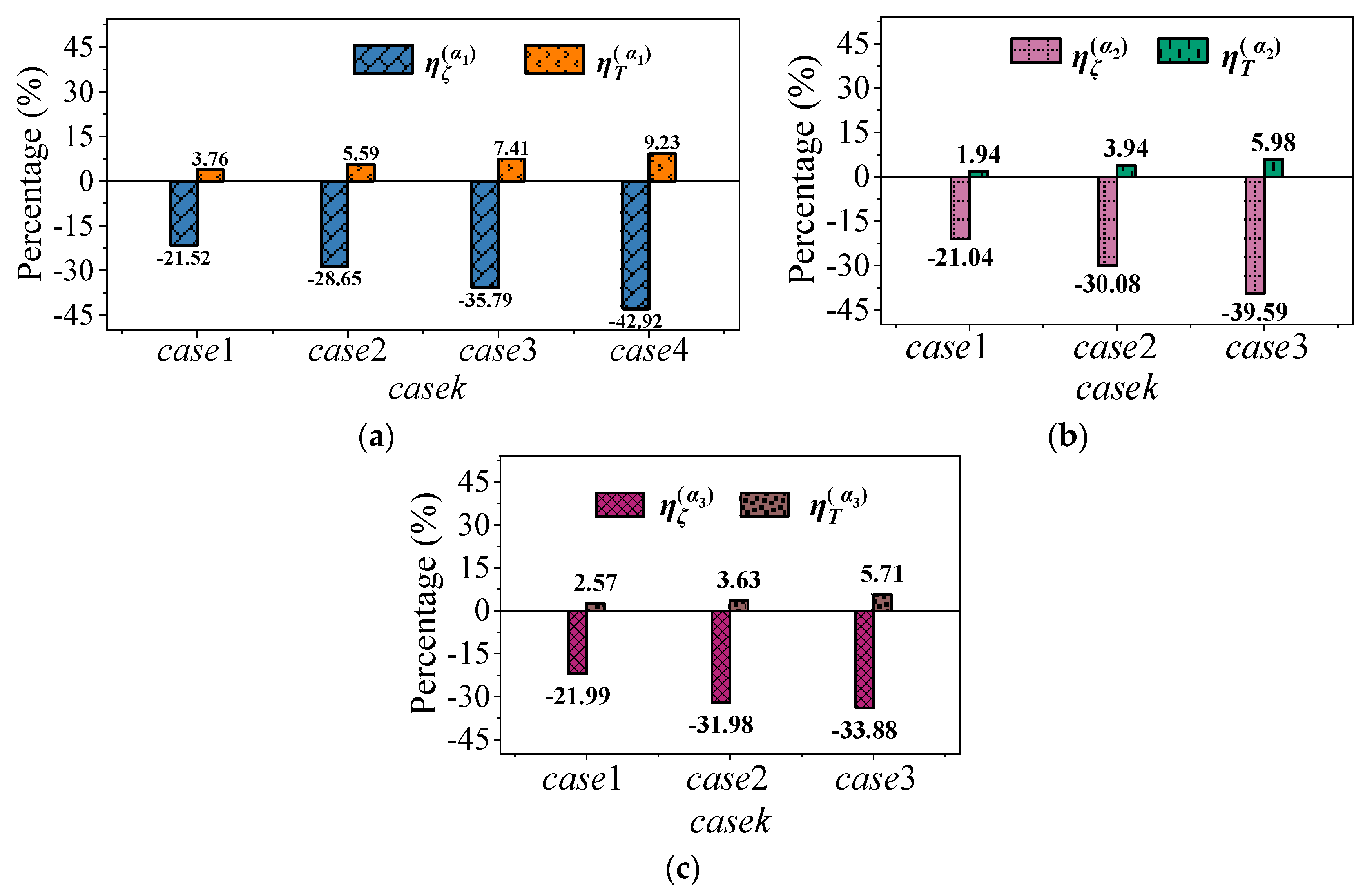
Table 1. The schematic diagram of the experimental setup and the real test platform are shown in
Figure 15 and
Figure 16, respectively. The DC source was used to provide input power for the driving motor. The host computer controlled the driving motor to rotate at the speed of 3800 rpm, through the motor controller. The test motor and the driving motor were connected through a coupler. Then, the test motor was driven by the driving motor. Considering the symmetry of the three-phase motor, only the no-load back-EMF of phase A was captured by the oscilloscope.
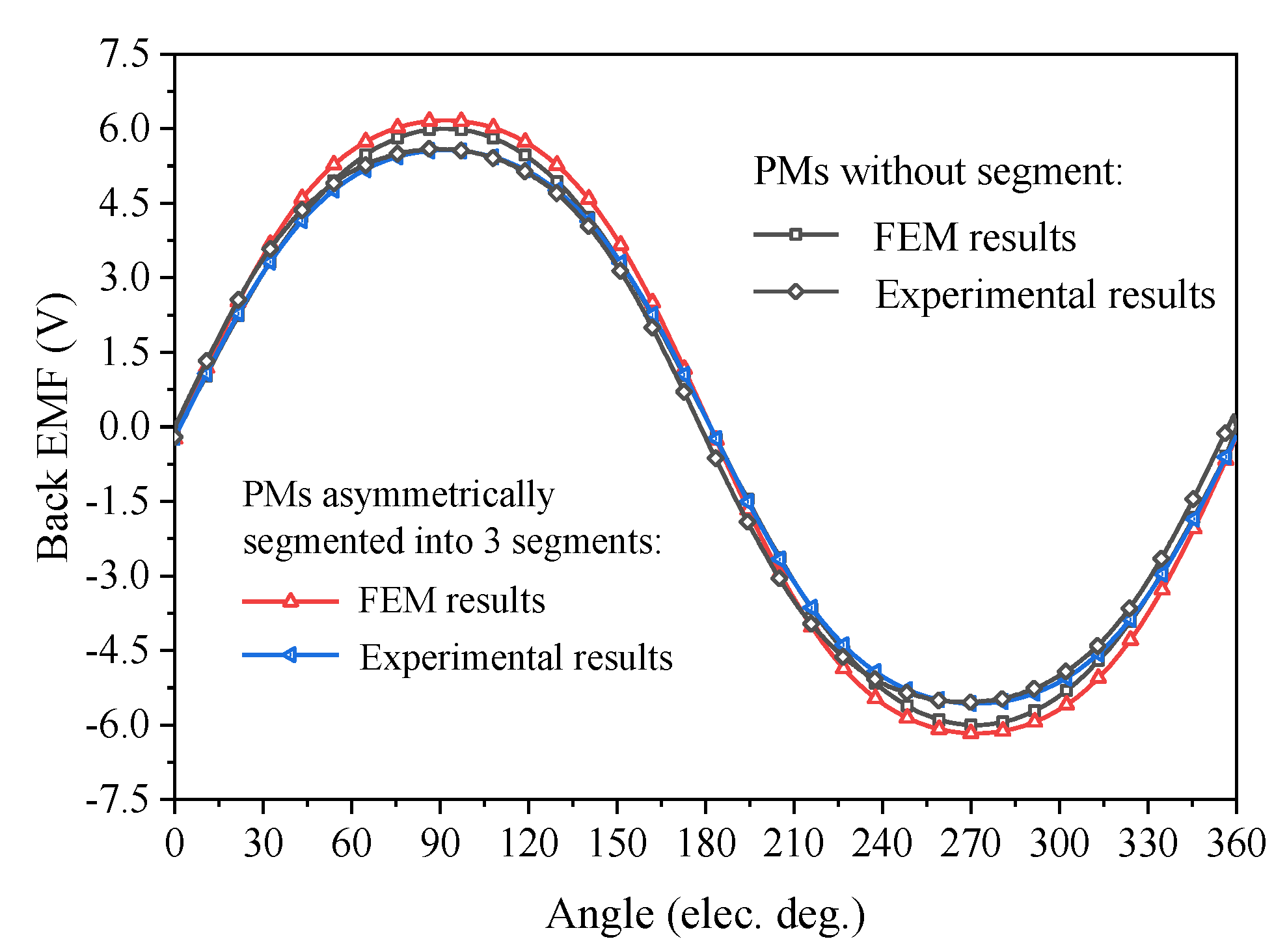
Figure 17 shows the waveforms of the no-load back-EMF of 2-D FEM and experimental results with PMs without segment and PMs asymmetrically segmented into three segments. It can be seen that the back-EMF amplitude of the 2-D FEM results of the PMs segmented into 3 segments is 2.8% higher than that of the PMs without segments. This is mainly because the flux density excited by the PMs segmented into 3 segments is higher than that of the PMs without segments. The fittings degrees between the 2-D FEM and experimental results are 12.9% and 9.7% for the cases of PM without segments and PMs asymmetrically segmented into three segments, respectively. The difference may mainly be due to the deficiency of the PMs’ magnetic field intensity in real motor topology and the ignorance of the axial end effect in 2-D FEM calculation. Overall, the experimental results are in good agreement with those of the FEM method.
7. Conclusions
In this paper, a method of improving the electromagnetic performance of the ironless permanent magnet (PM) BLDC motor in terms of no-load back-EMF and load torque was investigated through PM segmentation with different intensities of magnetizations for the segmented sub-PMs. The results showed that (1) PMs with both symmetrical and asymmetrical segmentations can obtain trapezoidal back-EMF waveforms, which is beneficial for torque improvement; (2) PMs with asymmetrical segmentations present better results on back-EMF and load torque characteristics than those of symmetrical segmentations; (3) specifically, as for the ironless PM BLDC motor investigated in this paper, the load torque for PMs asymmetrically segmented into three segments showed 60% higher than that of PMs symmetrically segment into five and seven segments. Moreover, trapezoidal back-EMF can be easier obtained with the increase in the number of PMs’ symmetrical segments. Finally, two ironless PM BLDC motor prototypes, one with PMs symmetrically segmented into three segments and the other without segments, were manufactured and tested. The experimental and FEM results were compared, and the results showed good agreement.























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}