
Online ADMM for Distributed Optimal Power Flow via Lagrangian Duality


Abstract
:1. Introduction
1.1. Primary Motivations
1.2. Related Work and Research Gap
1.3. Statement of Contributions
- The Lagrangian duality is utilized to couple the power flow equation and boundary information instead of directly establishing boundary coupling as the ADMM constraint, it can be well adapted to the real-time nature of DESs, such as solar energy, and it can also disclose less boundary information.
- For the SDP relaxation model of the static OPF, the distributed ADMM is compatibly employed to solve its convex Lagrangian duality problem instead of solving the iterative sub-problem of ADMM under the original nonconvex OPF model.
- In order to adapt the distributed ADMM to the dynamic OPF with renewables, an online scheme is proposed to cope with the uncertainties of DERs, in which the double-loop implementation is avoided, thus providing a provable performance guarantee.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Literature | Topic | AC/DC | Renewables | Approach |
|---|---|---|---|---|
| [30] | Dynamic OPF | DC | N/A | Distributed dual consensus ADMM |
| [23] | Real-time OPF | AC | N/A | Online gradient projection |
| [24] | Real-time OPF | AC | N/A | Quasi-Newton methods |
| [25,26] | Real-time OPF | AC | N/A | Deep reinforcement learning |
| [27] | Online OPF | DC | N/A | Lagrange multiplier method |
| [3] | Online OPF | AC | Wind turbine | Online mirror descent |
| [28] | Online OPF | AC | Photovoltaic | Second-order Taylor-based gradient |
| ours. | Online OPF | AC | Photovoltaic | Online ADMM Lagrangian duality |
2. Model and Formulation
2.1. Optimal Power Flow Formulation
2.2. Convex Relaxation Approach to OPF
2.3. Area Partitioning Based on Spectral Clustering
- (1).
- Construct the Laplacian matrix . Denote the nondiagonal entry of by the negative modulus of its corresponding complex admittance and the diagonal entry of by the sum of the complex admittance modulus, i.e.,
- (2).
- Find the K largest eigenvalues of and form the matrix by stacking the corresponding eigenvectors as columns.
- (3).
- Let be the vector corresponding to the n-th row of , . Cluster the points with the k-means algorithm into clusters .
- (4).
- Assign bus n to cluster if the n-th row of was assigned to cluster .
3. Distributed ADMM for Static OPF
3.1. Lagrangian Duality Based on Partition
3.2. Distributed ADMM for Lagrangian Duality
4. Distributed ADMM for Online OPF
4.1. Online Convex Optimization
4.2. Online OPF Formulation
4.3. ADMM for Online OPF
| Algorithm 1 Online ADMM for OPF. |
| Initialize:, , , and |
|
| Algorithm 2 Online PRSM-ADMM for OPF. |
| Initialize:, , , and |
5. Numerical Tests
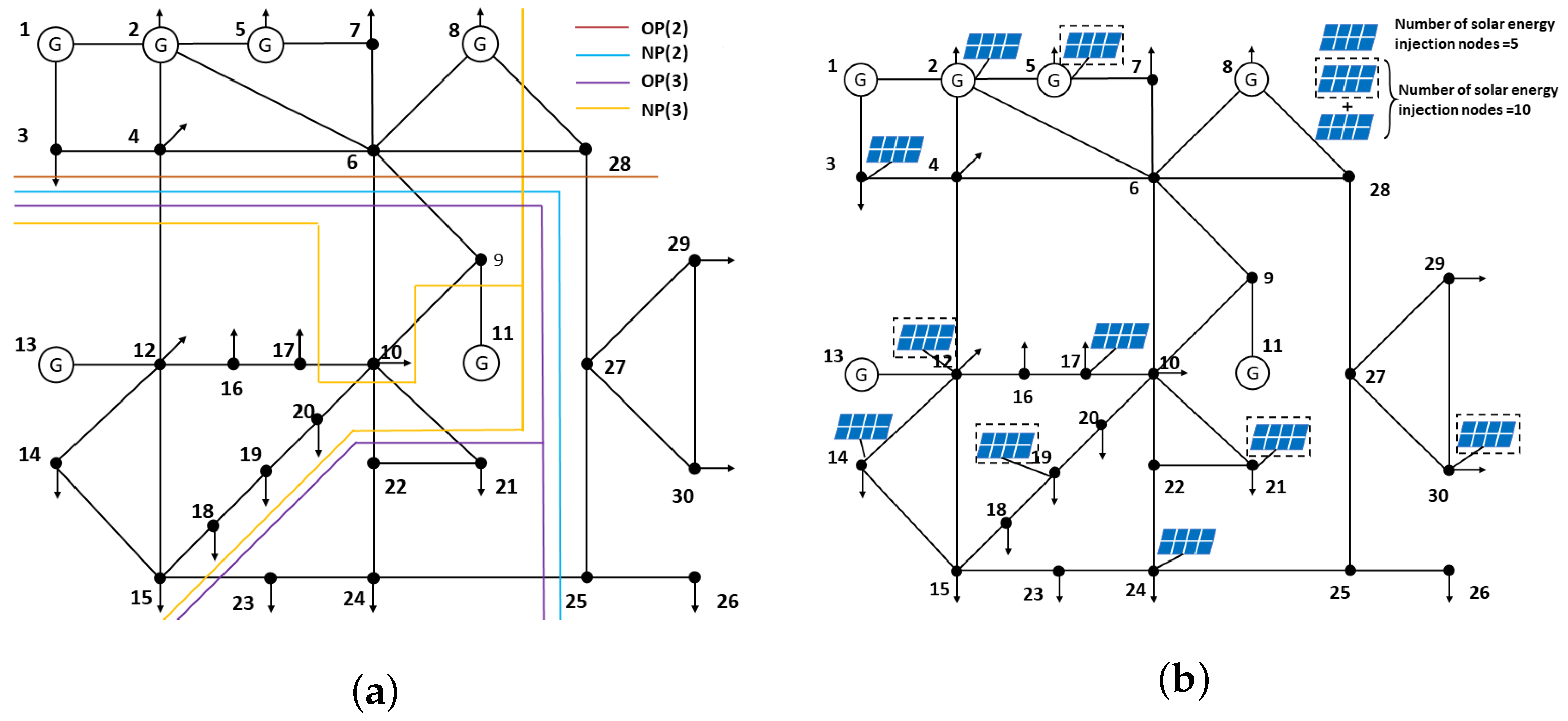
5.1. Simulation Setup and Area Partitioning
5.2. Static OPF Simulation
5.3. Online OPF Simulation
5.3.1. Performance Comparison
5.3.2. Online Performance Analysis
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Carpentier, J. Contribution to the economic dispatch problem. Bull. Soc. Fr. Electr. 1962, 3, 431–447. [Google Scholar]
- Madani, R.; Sojoudi, S.; Lavaei, J. Convex Relaxation for Optimal Power Flow Problem: Mesh Networks. IEEE Trans. Power Syst. 2015, 30, 199–211. [Google Scholar] [CrossRef]
- Kim, S.J.; Giannakis, G.B.; Lee, K.Y. Online Optimal Power Flow With Renewables. In Proceedings of the 2014 48th Asilomar Conference on Signals, Systems and Computers, Pacific Grove, CA, USA, 2–5 November 2014; pp. 335–360. [Google Scholar]
- Momoh, J.; Zhu, J. Improved interior point method for OPF problems. IEEE Trans. Power Syst. 1999, 14, 1114–1120. [Google Scholar] [CrossRef]
- Erseghe, T.; Tomasin, S. Power Flow Optimization for Smart Microgrids by SDP Relaxation on Linear Networks. IEEE Trans. Smart Grid 2013, 4, 751–762. [Google Scholar] [CrossRef]
- Lavaei, J.; Low, S. Zero Duality Gap in Optimal Power Flow Problem. IEEE Trans. Power Syst. 2012, 27, 92–107. [Google Scholar] [CrossRef] [Green Version]
- Sulc, P.; Backhaus, S.; Chertkov, M. Optimal Distributed Control of Reactive Power Via the Alternating Direction Method of Multipliers. IEEE Trans. Energy Convers. 2013, 29, 968–977. [Google Scholar] [CrossRef] [Green Version]
- Dall’Anese, E.; Zhu, H.; Giannakis, G. Distributed Optimal Power Flow for Smart Microgrids. IEEE Trans. Smart Grid 2013, 4, 1464–1475. [Google Scholar] [CrossRef] [Green Version]
- Erseghe, T. Distributed Optimal Power Flow Using ADMM. IEEE Trans. Power Syst. 2014, 29, 2370–2380. [Google Scholar] [CrossRef]
- Liao, C.Y.; Lin, W.; Chen, Y.M.; Chou, C.Y. A PV Micro-inverter With PV Current Decoupling Strategy. IEEE Trans. Power Electron. 2017, 32, 6544–6557. [Google Scholar] [CrossRef]
- Guo, J.; Hug, G.; Tonguz, O. A Case for Nonconvex Distributed Optimization in Large-Scale Power Systems. IEEE Trans. Power Syst. 2017, 32, 3842–3851. [Google Scholar] [CrossRef]
- Wang, Y.; Wu, L.; Wang, S. A Fully-Decentralized Consensus-Based ADMM Approach for DC-OPF with Demand Response. IEEE Trans. Smart Grid 2017, 8, 2637–2647. [Google Scholar] [CrossRef]
- Biagioni, D.; Graf, P.; Zhang, X.; Zamzam, A.S.; Baker, K.; King, J. Learning-Accelerated ADMM for Distributed DC Optimal Power Flow. IEEE Control Syst. Lett. 2022, 6, 1–6. [Google Scholar] [CrossRef]
- Jalali, M.; Kekatos, V.; Gatsis, N.; Deka, D. Designing Reactive Power Control Rules for Smart Inverters Using Support Vector Machines. IEEE Trans. Smart Grid 2020, 11, 1759–1770. [Google Scholar] [CrossRef] [Green Version]
- Turitsyn, K.; Sulc, P.; Backhaus, S.; Chertkov, M. Options for Control of Reactive Power by Distributed Photovoltaic Generators. Proc. IEEE 2011, 99, 1063–1073. [Google Scholar] [CrossRef] [Green Version]
- Boyd, S.P.; Parikh, N.; Chu, E.; Peleato, B.; Eckstein, J. Distributed Optimization and Statistical Learning via the Alternating Direction Method of Multipliers. Found. Trends Mach. Learn. 2011, 3, 1–122. [Google Scholar] [CrossRef]
- Biswas, P.P.; Suganthan, P.; Amaratunga, G.A. Optimal power flow solutions incorporating stochastic wind and solar power. Energy Convers. Manag. 2017, 148, 1194–1207. [Google Scholar] [CrossRef]
- Agalgaonkar, Y.P.; Pal, B.; Jabr, R. Stochastic Distribution System Operation Considering Voltage Regulation Risks in the Presence of PV Generation. IEEE Trans. Sustain. Energy 2015, 6, 1315–1324. [Google Scholar] [CrossRef] [Green Version]
- Xu, Y.; Hu, J.; Gu, W.; Su, W.; Liu, W. Real-Time Distributed Control of Battery Energy Storage Systems for Security Constrained DC-OPF. IEEE Trans. Smart Grid 2018, 9, 1580–1589. [Google Scholar] [CrossRef]
- Malekpour, A.; Pahwa, A. A Dynamic Operational Scheme for Residential PV Smart Inverters. IEEE Trans. Smart Grid 2017, 8, 2258–2267. [Google Scholar] [CrossRef]
- Gill, S.; Kockar, I.; Ault, G.W. Dynamic Optimal Power Flow for Active Distribution Networks. IEEE Trans. Power Syst. 2013, 29, 121–131. [Google Scholar] [CrossRef] [Green Version]
- Zhang, Y.; Gatsis, N.; Giannakis, G.B. Robust Energy Management for Microgrids With High-Penetration Renewables. IEEE Trans. Sustain. Energy 2012, 4, 944–953. [Google Scholar] [CrossRef]
- Gan, L.; Low, S.H. An Online Gradient Algorithm for Optimal Power Flow on Radial Networks. IEEE J. Sel. Areas Commun. 2016, 34, 625–638. [Google Scholar] [CrossRef]
- Tang, Y.; Dvijotham, K.; Low, S. Real-Time Optimal Power Flow. IEEE Trans. Smart Grid 2017, 8, 2963–2973. [Google Scholar] [CrossRef]
- Yan, Z.; Xu, Y. Real-Time Optimal Power Flow: A Lagrangian Based Deep Reinforcement Learning Approach. IEEE Trans. Power Syst. 2020, 35, 3270–3273. [Google Scholar] [CrossRef]
- Sayed, A.R.; Wang, C.; Anis, H.; Bi, T. Feasibility Constrained Online Calculation for Real-Time Optimal Power Flow: A Convex Constrained Deep Reinforcement Learning Approach. IEEE Trans. Power Syst. 2022, 1–13. [Google Scholar] [CrossRef]
- Trinklein, E.H.; Parker, G.G.; Robinett, R.D.; Weaver, W.W. Toward Online Optimal Power Flow of a Networked DC Microgrid System. IEEE J. Emerg. Sel. Top. Power Electron. 2017, 5, 949–959. [Google Scholar] [CrossRef]
- Zhu, X.; Han, X.; Yang, M.; Xu, Y.; Wang, S. Distributed online optimal power flow for distribution system. Int. J. Electr. Power Energy Syst. 2020, 120, 105970. [Google Scholar] [CrossRef]
- Pourbabak, H.; Alsafasfeh, Q.; Su, W. A Distributed Consensus-Based Algorithm for Optimal Power Flow in DC Distribution Grids. IEEE Trans. Power Syst. 2020, 35, 3506–3515. [Google Scholar] [CrossRef]
- Yang, L.; Luo, J.; Xu, Y.; Zhang, Z.; Dong, Z. A Distributed Dual Consensus ADMM Based on Partition for DC-DOPF With Carbon Emission Trading. IEEE Trans. Ind. Inf. 2020, 16, 1858–1872. [Google Scholar] [CrossRef]
- Fukushima, M. Application of the Alternating Direction Method of Multipliers to Separable Convex Programming Problems. Comput. Optim. Appl. 1992, 1, 93–111. [Google Scholar] [CrossRef]
- Von Luxburg, U. A tutorial on spectral clustering. Stat. Comput. 2007, 17, 395–416. [Google Scholar] [CrossRef]
- Hartigan, J.; Wong, M. Algorithm AS 136: A K-Means Clustering Algorithm. Ann. Appl. Stat. 1979, 28, 100–108. [Google Scholar] [CrossRef]
- Boyd, S.; Vandenberghe, L. Convex Optimization; Cambridge University Press: Cambridge, UK, 2004. [Google Scholar]
- Wang, H.; Banerjee, A. Online Alternating Direction Method. In Proceedings of the 29th International Conference on Machine Learning (ICML 2012), Edinburgh, UK, 26 June–1 July 2012; pp. 1119–1126. [Google Scholar]
- Kadkhodaie, M.; Christakopoulou, K.; Sanjabi, M.; Banerjee, A. Accelerated Alternating Direction Method of Multipliers. In Proceedings of the 21th ACM SIGKDD International Conference on Knowledge Discovery and Data Mining, Sydney, Australia, 10–13 August 2015; pp. 497–506. [Google Scholar]
- He, B.; Liu, H.; Wang, Z.; Yuan, X. Application of the Alternating Direction Method of Multipliers to Separable Convex Programming Problems. SIAM J. Control. Optim. 2014, 24, 1011–1040. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Ullah, Z.; Wang, S.; Radosavljević, J.; Lai, J. A Solution to the Optimal Power Flow Problem Considering WT and PV Generation. IEEE Access 2019, 7, 46763–46772. [Google Scholar] [CrossRef]
- Keyhani, A. Design of Smart Power Grid Renewable Energy Systems, 3rd ed.; Wiley Press: Hoboken, NJ, USA, 2019. [Google Scholar]
- Erseghe, T. A distributed approach to the OPF problem. EURASIP J. Adv. Signal Process. 2015, 2015, 1–13. [Google Scholar] [CrossRef] [Green Version]
- Meyer-Huebner, N.; Suriyah, M.; Leibfried, T. Distributed Optimal Power Flow in Hybrid AC–DC Grids. IEEE Trans. Power Syst. 2019, 34, 2937–2946. [Google Scholar] [CrossRef]










Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, S.; Pu, L.; Huang, X.; Yu, Y.; Shi, Y.; Wang, H. Online ADMM for Distributed Optimal Power Flow via Lagrangian Duality. Energies 2022, 15, 9525. https://doi.org/10.3390/en15249525
Wang S, Pu L, Huang X, Yu Y, Shi Y, Wang H. Online ADMM for Distributed Optimal Power Flow via Lagrangian Duality. Energies. 2022; 15(24):9525. https://doi.org/10.3390/en15249525
Chicago/Turabian StyleWang, Song, Liangyi Pu, Xiaodong Huang, Yifan Yu, Yawei Shi, and Huiwei Wang. 2022. "Online ADMM for Distributed Optimal Power Flow via Lagrangian Duality" Energies 15, no. 24: 9525. https://doi.org/10.3390/en15249525
APA StyleWang, S., Pu, L., Huang, X., Yu, Y., Shi, Y., & Wang, H. (2022). Online ADMM for Distributed Optimal Power Flow via Lagrangian Duality. Energies, 15(24), 9525. https://doi.org/10.3390/en15249525