1. Introduction
Numerical simulation has become indispensable in the design of hydraulic turbines. However, the question of the effort required for the design and calculation of the components arises. PART I of the publication series already described the state-of-the-art in this field. The state of the art is the mean-stress concept or the calculation of individual exciting frequencies in the system. The system responses to these particular excitation frequencies are determined through Harmonic Response Analysis (HRA). However, as already shown at PART I of this publication series, more complex modelling and more elaborate computation is required to calculate the issues of transient operating conditions or flow phenomena in the deep part-load region. This part of the publication concentrates on the methods used, the boundary conditions applied and those parameters that have a decisive influence on the entire calculation area. We distinguish between fluid mechanics and solid mechanics. In order to be able to transfer the corresponding information from fluid mechanics to structural mechanics, suitable coupling algorithms are needed.
Researchers worldwide have already published a wide variety of singular observations of flow phenomena and interactions with structure. In this chapter, a brief outline of the most important publications in numerical simulation of the last four to five years will be given. According to Section 2.1 from PART I, the classification was chosen to structure the literature study. The rotor–stator interaction ➀ forms the beginning. This phenomenon, as described earlier, is only dependent on the number of vanes and blades. Publication [
1], from 2012, raises the rotor-stator interaction impact on the runner’s dynamic loads. Publication [
2], which already provides a review of the numerical methods at that time, dates from the same year. Emerging energy storage problems and the related investigation of pump-turbines are shown at [
3], which deals with the rotor-stator interaction of a pump-turbine in turbine operation. Publication [
4] shows the extent to which open source software is already being used. Here, OpenFoam was used for the numerical calculation of the rotor-stator interaction of Francis turbines. Publication [
5] deals already with the investigation of guide vane as part of the rotor-stator interaction. It is no longer just the runner itself under investigation, but the guide vane in front of it is already included in the considerations.
The next phenomenon in the line is the vortex shedding ➁. That is the detachment of a flow behind a body or an edge. Inside a hydraulic turbine, there are always edges and vertices where the flow can detach and cause these well-known and distinctive vortex formations. As more sophisticated turbulence models for numerical calculation of this phenomenon are required, and more complex meshes are necessary, the number of relevant publications is relatively tiny. Mostly, it is experimental investigations that provide a basis for the validation, such as [
6] of 2019, or singular analysis of individual components, see [
7] in 2017, without investigating the effects on the entire unit.
An approximately similar situation is found at the interblade-vortex ➂ flow phenomenon. Again, the resources for numerical simulations are very high, and therefore only a few all-encompassing simulations have been published. Since interblade-vortex only occurs at low-load operation, the corresponding investigations are also from the recent past. Two representative publications, namely [
8,
9] from 2017, deal with this flow structure’s occurrence and characteristics in a Francis turbine. They show the flow effect based on numerical simulations. However, the mechanical effects on the structure are missing, as they are tough to validate.
There are considerably more publications on the draft tube vortex ➃. The overload domain is currently the most intensively researched operational area. Publications in this area deal with the unstable behavior of the flow phenomenon and its effects on the machine unit’s power output. This draft tube vortex’s high energy content and its transient behavior lead to undesired power swings, which are replicated in the electrical grid (see [
10]). In the case of the part-load draft tube vortex, the question of origin is no longer an issue but rather the exact determination of the impacts. This flow phenomenon causes pressure fluctuations and transient vortex structures in the draft tube as well as fluctuations at the turbine shaft, which are responsible for power swings as oscillating torque. A basic understanding of the occurrence of the draft tube vortex is provided by [
11], while [
12] already uses two-phase cavitation models for the precise determination of the pressure fields. The influence of different blade lengths and water admission to avoid this effect are discussed in [
13,
14]. The dependence of the draft tube vortex on the tailwater level was investigated by [
15]. The last three publications already attempt to present parameters for countermeasures.
The complexity of cavitation ➄ has prevented more precise numerical calculations and validations. Mainly the extremely high frequencies of this physical effect pose a challenge to the simulation. Therefore, hardly any more detailed investigations exist, which are also validated by a corresponding measurement. The appearance of cavitation as a local pressure drop below the vapor pressure tends to be evaluated globally and not at the level of individual bubbles. Experimental results in this field have been published, but numerical results have so far been limited to explaining the fundamentals. Occasionally, one sees publications that touch on this topic to investigate design countermeasures (see [
16]). The stochastic pressure pulsations ➄ at deep part-load operating areas show a similar pattern. One recognizes a multitude of different frequencies. However, not all of them have been researched yet. Some of these amplitude peaks are natural frequencies, and others are excitation frequencies. Therefore, it is essential to develop a method that analyses and evaluates all frequencies in one system.
The free oscillating water surface’s ➅ research field during synchronous condenser mode of a Francis turbine is relatively new. This mode is used by the generator side to supply grid stabilization measures, such as phase regulation and reactive power delivery. In Austria, selected hydropower plants are equipped for this operational mode and support the electrical grid with their services. Here, the turbine is drained with compressed air and operated in air. The water is pressed into the draft tube cone and remains there until the turbine is refilled for regular operation. If this process lasts for a longer time, a rotating wave develops on the water surface. This phenomenon is called oscillating water surface or sloshing and was investigated (2017) by [
17]. This air-water system’s excitation mechanism is still not proven from a fluid mechanics point of view. In 2019, reference [
18] provides a theoretical background and [
19] basic experimental investigations on a laboratory test rig.
All listed flow phenomena interact with the Francis turbine as a rigid body and have to be coupled with structural mechanic fatigue investigation. A review of fluid–structure interactions in Francis turbines was provided by [
20]. Mapping methods manage the data transfer between CFD and FE meshes. They are necessary because each mesh is optimized for the respective application, and hence they are not congruent at the interface. The mapping methods’ influence on the systematic error during data transfer was investigated in [
21].
In addition to the fatigue assessment, the modal analysis of a runner is of crucial importance. Knowing the natural frequency and eigenmode of a component is the only way to estimate how sensitive it is to fail in resonance conditions. Since the runner rotates in water, the surrounding water masses change the part’s natural frequency and eigenmodes. Issues of the oscillating water masses, stiffness and damping of the coupled system have to be considered. Added mass effects are known for a long time and have already been scientifically investigated. More attention has been paid to the damping and stiffness effects of the water in combination with the structure (see [
22]). The complexity of this research relates to the validation of the mathematical contexts and the resulting numerical simulations. It is therefore essential that numerical results are properly validated (see, e.g., [
23]). Including two-phase flows into the considerations results in complex investigations, as shown in [
24], where added mass effects were combined with blade cavitation.
The number of new publications in fatigue analysis of Francis turbines in recent years shows the increased research activities. All publications focus on the deep part-load range, as the flow phenomena occurring in this operating range have a significant impact on the runner’s lifetime. However, taking a closer look at the research activities, different approaches are recognisable: Reference [
25] deals with the necessary turbulence modelling to create a balance between simulation time and result accuracy. The BSL-EARSM turbulence model at load step
has been applied. Reference [
26] investigated the deep part-load range of a model pump-turbine in pumping mode. Reference [
27] investigated this range in turbine mode. References [
6,
28,
29,
30] performed their investigations on prototype plants and thus excluding scaling effects from model to prototype.
This short literature review shows that there is still room for further development and research work, especially in terms of a holistic approach where all appearing flow phenomena are investigated at once. One of the future goals will be reducing costly prototype measurements to a minimum by using numerical simulation. An ideally validated numerical approach would allow further investigation of harmful flow phenomena to be accomplished by external sensors on the machine unit. This paper’s content is structured like follows: the introduction shows a literature review about the latest publications on numerical and experimental validation in this field. An additional presentation of the suggested assessment method shows the numerical approach.
Section 2 describes the hydropower plants and the installed units for these investigations. Numerical simulations and validation measurements were performed using these prototype units.
Section 3 presents the setup of modeling the computational domain, the chosen boundary conditions, the used mathematical models of fluid mechanics (turbulence models), and subsequent structural mechanics. Sensitivity analyses were carried out to estimate the influence of input parameters on the solution. On some occasions, even these sensitivity analyzes were validated by measurements.
Section 4 shows the results in terms of natural frequencies, eigenmodes, and numerical simulated mechanical stresses. An appropriate discussion in
Section 5 should raise some questions about the suggested method’s appropriateness and highlight future research needs on this topic.
The methods and analyzes presented are based on the two research projects GSG-PSP-LowLoad and MDREST, where two prototype measurements at the included hydropower plants were conducted. Plant documents, drawings, and 3D models for the calculations were also provided. The numerical models’ validation was also realized at those two plants within the research projects’ context. In Part III of this publication series, the prototype measurements are presented in detail, and in Part IV, the comparison between the results of this paper and the next one.
Beyond the State-of-the-Art Investigations—The Transient Assessment Model
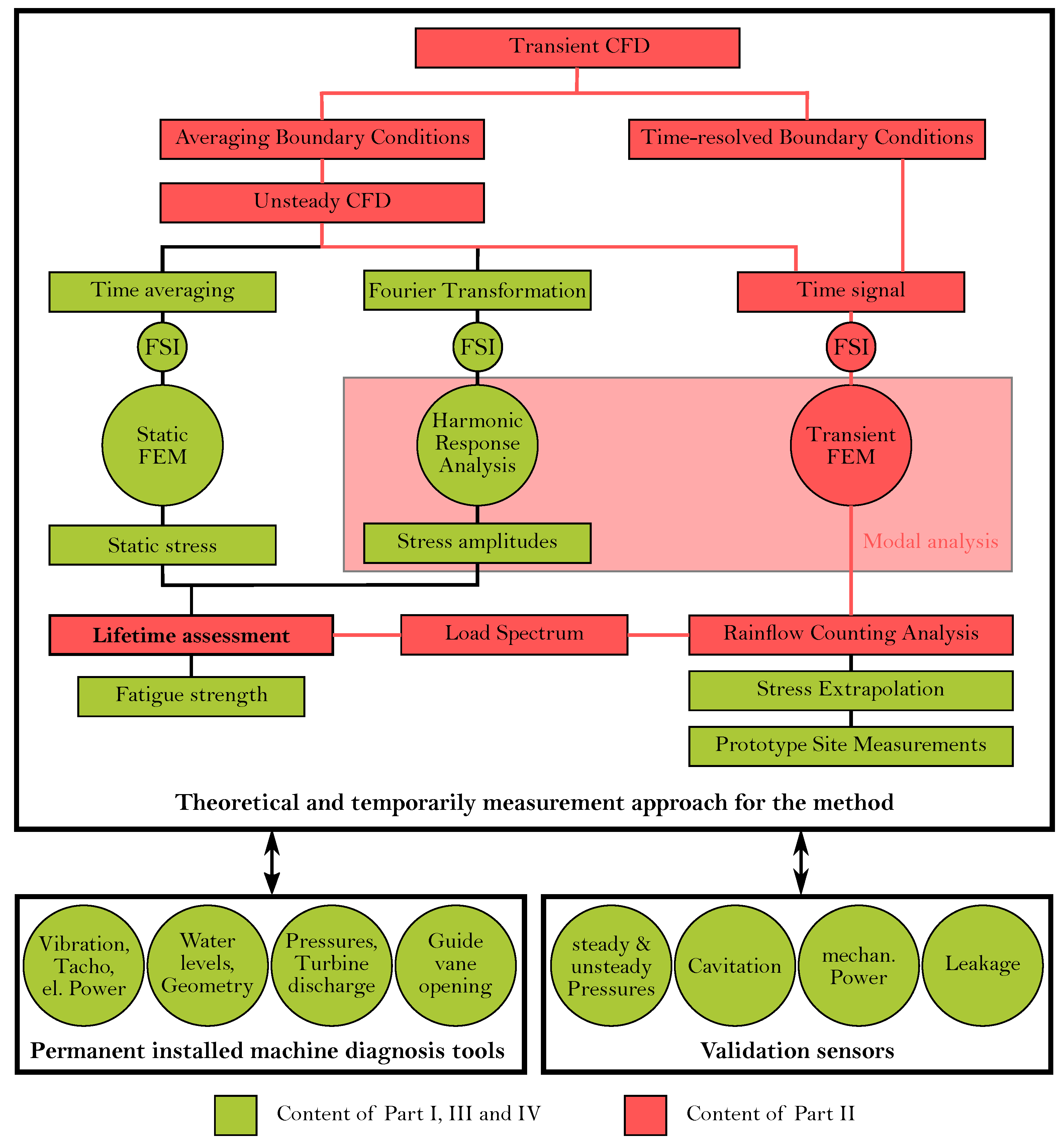
Figure 1 shows the content of this paper in red using the presented assessment protocol. It shows the numerical simulation path from the transient CFD calculations, the fluid–structure interaction, and the mechanical stresses’ calculations down to the lifetime analysis. The paper deals with the necessary models which have to be generated for the calculation. Any uncertainties in the input parameters are discussed utilizing sensitivity analyzes. The accompanying prototype measurements validated the entire simulation approach. Likewise, the sensitivity analyses were estimated accordingly by sensors at the monitor points.
Using numerical methods to determine the lifetime, it is essential to quantify the used methods’ reliability. Ultimately, the determination of systematic errors can be domain-specific (CFD, FSI, FE) or based on the overall comparison of the calculated lifetime to the measured one. This point of uncertainty considerations is further elaborated in PAPER IV. Here, a description of the used turbines is given, followed by the models and their boundary conditions, and finally an application of the simulation models to determine the numerically calculated lifetime on an actual turbine. On the one hand, the data’s evaluation takes place the hotspots because these are failure-critical and thus relevant for the lifetime calculation. On the other hand, at the positions of the strain gauges during the prototype measurement, calibrate the entire calculation method.
The numerical simulation procedure part, which is already used as a standard in the industry, is not explained in detail here due to lack of space. Only those segments of the evaluation process that are not yet part of the industrial design repertoire for Francis turbines’ will be described. This method is still possessed for research projects with the appropriate hardware, computer capacities, and measuring equipment. About 3 million CPU hours were used for the flow calculation of the two Francis runners examined.
3. Numerical Simulations at the Transient Assessment Model
This chapter’s further explanations include only hydropower plant 2, although they can be transferred to the pumped storage power plant 1 analogously. Lack of space prevents the authors from presenting the detailed modeling of both plants. In cases of significant differences that might lead to different solutions, they are mentioned accordingly. The method used remains unaffected and can be transferred.
Section 3 illustrates all computational models, boundary conditions, and input parameters necessary to conduct the lifetime’s numerical determination. Details have already been published on several occasions. Therefore only a brief description of the principal but essential parts like CFD, FEA, and Modal analysis are given.
Where boundary conditions or input parameters were not available in the appropriate accuracy, sensitivity analysis, including measurements by validation sensors, was performed. Hence, it became possible to investigate how dependent the results are on the assumed or underlying parameters. These uncertainties will be addressed and further explored in Part IV of this publication series. An important point will be the interaction of various uncertainties and deviations on the final result, the mechanical stress in the runner, or its lifetime.
3.1. Computational Fluid Dynamics (CFD)
As shown in
Figure 1, the numerical flow simulation is the evaluation method’s initial point. The procedure steps themselves have already been described [
32] and are not discussed further. This chapter deals with the models, boundary conditions, and limitations.
3.1.1. Model Description
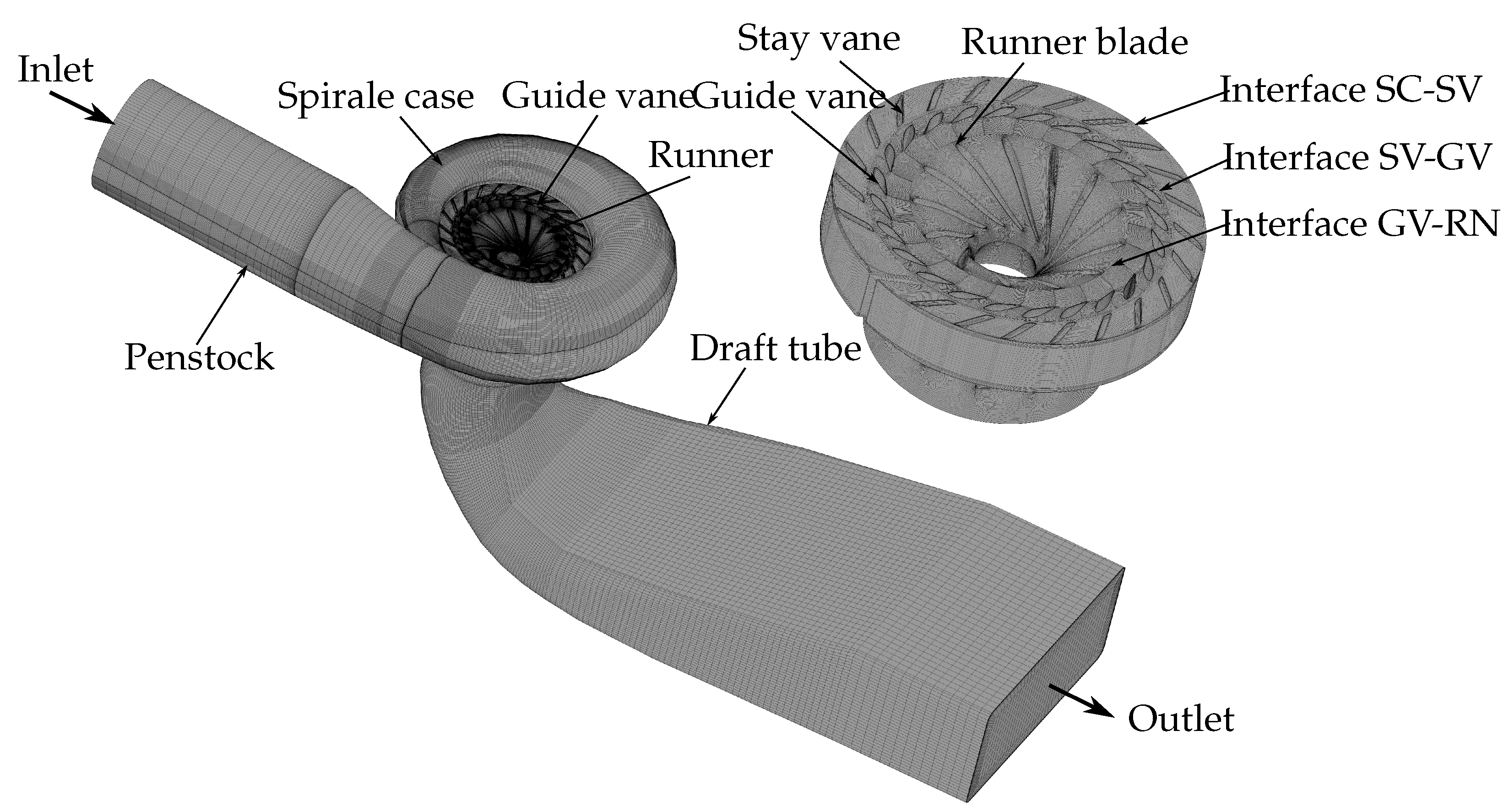
As both transient and unsteady calculations are carried out, no symmetry conditions can be used to discretize the fluid domain. Accordingly, the full model of the hydraulic turbines consists of:
The individual meshes of the components are afterward coupled by interfaces (see
Figure 6).
The mesh discretization of the individual components followed general guidelines. The entire mesh of the machine was then subjected to a mesh independency study according to [
33]. Different mesh refinements were generated for different studies in order to resolve the respective flow effects. Parameters such as wall spacing, wall treatment, Y+, and more were adjusted to the turbulence models used. For example, grid sizes of about 6 million cells were used for the investigation of transient processes in the low-load region [
30] for hydropower plant 2. In the case of transient processes (e.g., STU), a mesh with approximately 13 million cells [
34] was created and for the investigations of air injection and vortex shedding at the trailing edge of the runner, the existing mesh had to be refined again to approximately 37.5 million cells [
35].
In terms of pumped storage plant 1, the mesh was created from individual meshes and coupled by interfaces. The entire machine unit consisted of approximately 6 million elements [
36]. Flow parameters and grid independence study were performed accordingly.
3.1.2. Boundaries
In terms of boundary conditions and requirements for the model, the following settings should be considered:
The global boundary conditions (inlet and outlet) should never be set at those surfaces where an evaluation plane or monitor points (=measurement points) are located, but always beyond.
The inlet is determined as mass flow rate, whereas the outlet consists of a static pressure level. This combination proved to be numerically stable. Furthermore, the mass flow and the pressure at the draft tube outlet are adapted to the actual measured values.
In the case of pumped storage power plant 1, a radial pressure equilibrium was set at the draft tube outlet due to a circular cross-sectional shape at this area. This setup results in more realistic values, especially in the low-load range. The calculated values were compared with the measured ones at this point.
The coupling of stationary interfaces is modeled by a General Grid Interface (GGI). For the rotor-stator interaction, a transient rotor-stator interface, implemented in Ansys CFX 18.0, is used for the unsteady analysis.
To capture transient events, an approach covering moving guide vanes and varying boundary conditions is presented in [
30]. The guide vane movement is realized by using a displacement diffusion model combined with a re-meshing procedure, which is further explained in [
37].
As fluid, water at 20 degree celsius, treated as single-phase incompressible medium, is used for general investigations. In terms of air injection a two-phase model in combination with a cavitation model was used.
3.1.3. Turbulence Model
The selection of the supposedly correct turbulence model for calculating a wide variety of off-design points evolved.
In terms of steady CFD analysis, the shear stress transport (k-
-SST) model is used while in case of the unsteady analysis the SAS-SST model is preferred [
28]. To ensure sufficient convergence, 1000 iterations with a physical time step of
, which corresponds to one runner rotation, are simulated. In case of the unsteady analysis. In case of the unsteady analysis the time step is set to a value corresponding to
of one runner rotation The results of the steady state simulation are used as an initial condition to improve and speed-up convergence. Furthermore, a total amount of 15 runner rotations were simulated.
At the Start-Up (STU) simulations a new turbulence model was used, namely the Stress Blended Eddy Stimulation (SBES) turbulence model. An approach which combines strong shielding and protection against the LES application in the boundary layer as well as WMLES. The model provides rapid and distinctive RANS-LES transition.
3.1.4. Numerical Simulation Program
The numerical simulations follow the prototype measurements. Such a procedure is the only way to ensure that the calculations are based on real boundary conditions and validation values.
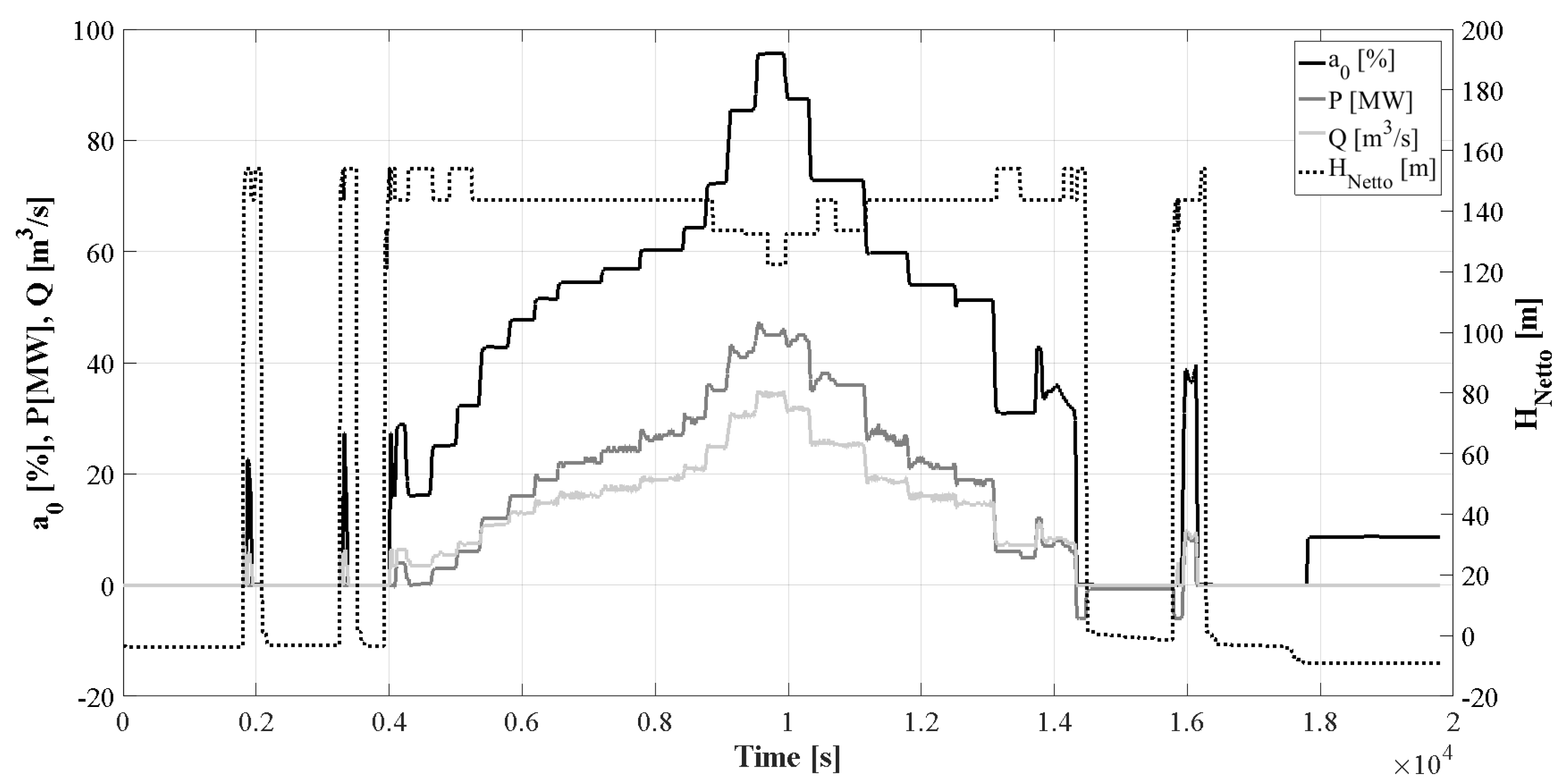
The numerical simulations have been performed according to
Figure 7. Start (STU) No. 1, at approximately
s, and Start (STU) No. 2, at approximately
seconds of the machine unit were investigated and published by [
37]. Furthermore, the load rejection (LR) case, at approximately
s was investigated. These operating points are also called transient operational points because they are extremely unstable in terms of flow behavior, and phenomena can occur momentarily and disappear again.
In contrast, with the machine already synchronized, the load changes represent relatively stationary operating changes. Reference [
38] investigated all load changes concerning their effects on the dynamic stresses, using the transient pressure field calculations, from the low partial load point to the overload, as a starting point.
3.2. Modal Analysis (Natural Frequencies/Eigenmodes)
In addition to the apparent exciting frequencies like the runner’s rotational speed, there is a bunch of other phenomena in hydropower turbines, which can excite parts of the machine. Phenomena like the gate passing frequency, vortex shedding, or the draft tube vortex are well known and determined with numerical methods. This makes it even more important to know the components’ natural frequencies, which can potentially be excited. The following chapter should show some possibilities to capture the natural frequencies of important machine parts.
3.2.1. Guide Vane
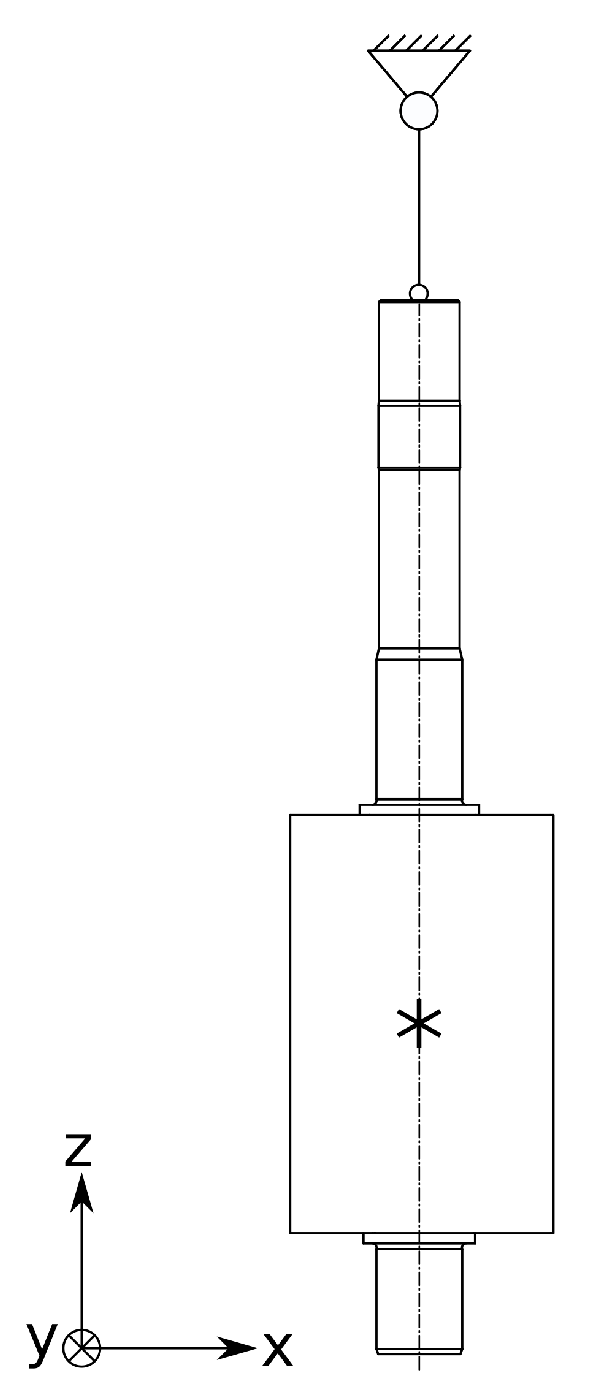
Two different guide vane models were used for the modal analysis of this part. The first model was intended to represent the free-swinging guide vane, and hence it had no supports as shown in
Figure 8. The rigid-body modes resulting from this boundary condition are ignored for further evaluation of the results. The second model represented the guide vane in its mounted configuration. For this, guide vane struts and the three bearings were considered. Due to the lack of reliable bearing data, no velocity-dependent damping could be used, but instead, the simpler model of Rayleigh damping. The two parameters necessary for Rayleigh damping were determined using the damping ratio
derived from the measurements.
3.2.2. Runner
The following section contains the description of the used models, boundary conditions and restrictions or dependencies.
Description of model
For the runner’s modal analysis and the further evaluation of the added mass effect, a reference model (Model 1) and two models with different approaches of water volume modeling were created. Model 1 incorporates a runner in air investigation and serves as a reference for further comparisons. The runner in a water tank model (Model 2) is the first benchmark to investigate the added mass effect. On that occasion, a simple water cylinder was placed around the runner (see
Figure 9), which accords the infinite large water tank.
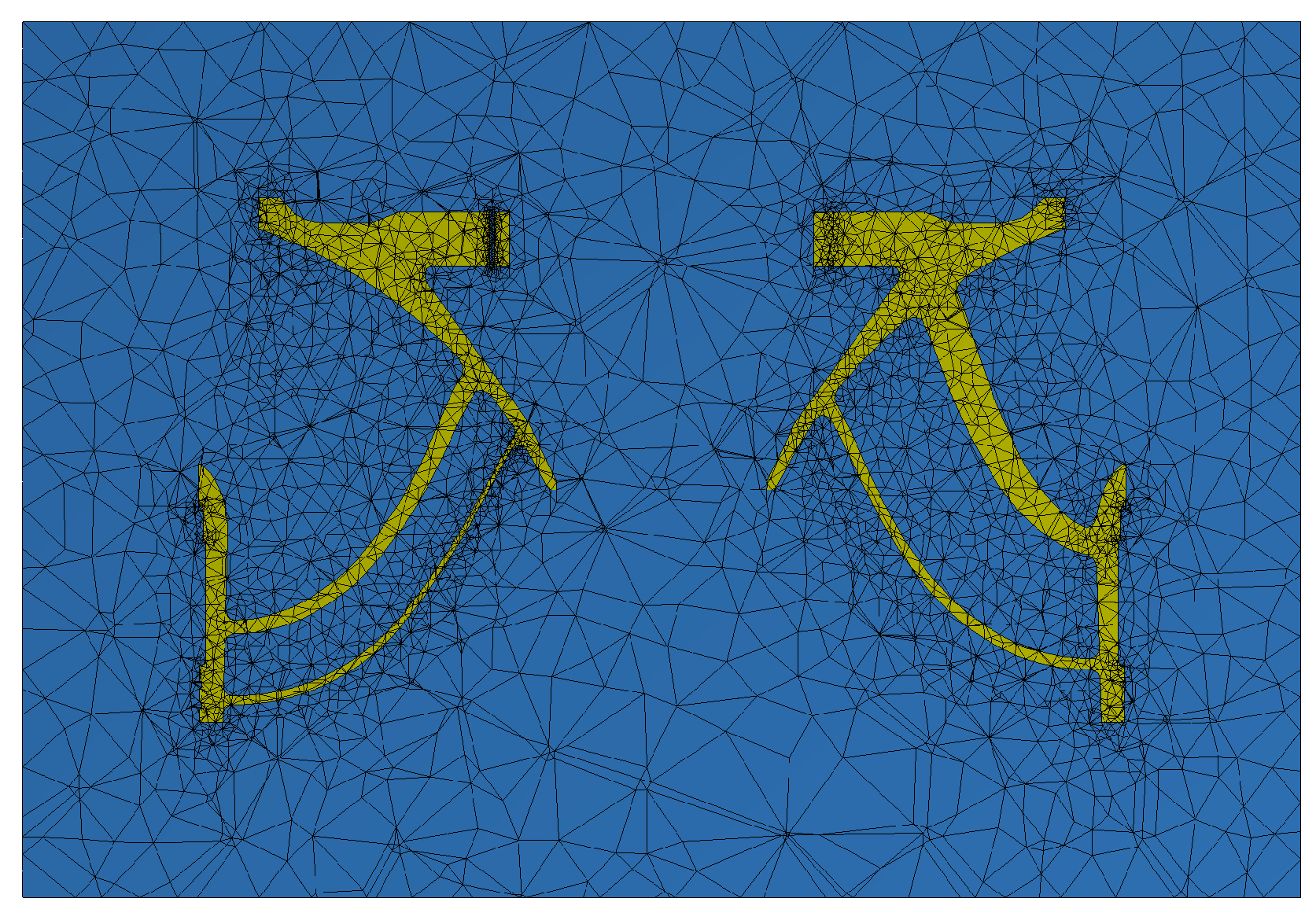
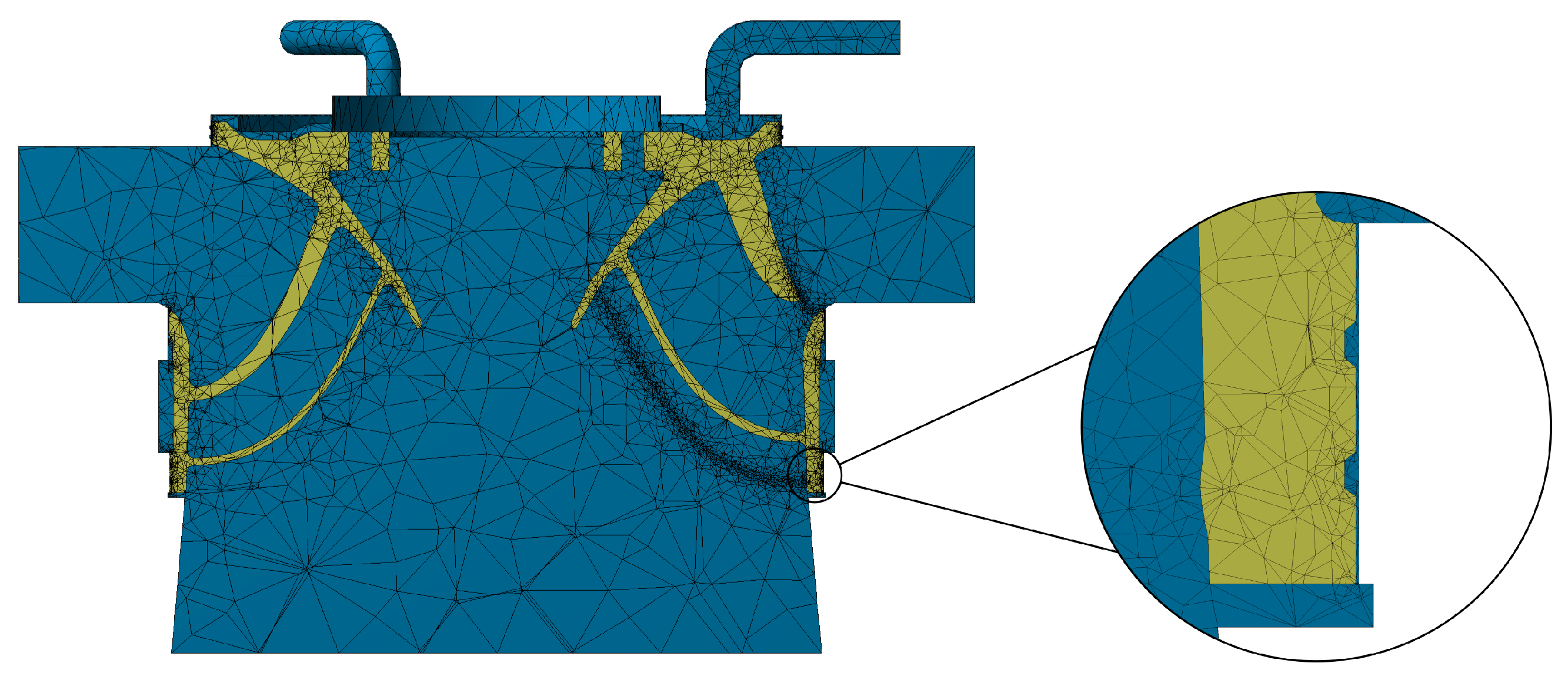
Moreover, the second model considered a limited area at the intake, a small part of the draft tube, and the runner sidewall gaps (see
Figure 10). In the following, this setup is referred to as Model 3. Other configurations have been investigated but will not be discussed further as this would exceed the limits of this paper. A detailed description can be found in [
39].
These models used the same boundary conditions: fixed support at the runner crown, no external forces, and no structural damping. The water volume was meshed with FLUID221 elements; the water volume’s mesh size was a sixth of the wavelength of the highest frequency of interest (for quadratic elements). For linear elements, a twelfth would be necessary. On surfaces with no pressure wave reflection a fixed pressure boundary condition was applied. Referring to the cylinder-model, these are all outer faces of the water volume. At the runner sidewall gap model, these are the inlet and outlet faces. All other faces, which are no FSI, reflect the pressure waves without any losses.
Boundaries/effects
To determine the added mass effect on the runner’s natural frequencies, the runner’s modal analysis in air was compared with the results of the cylinder model. The first finding is based on the fact that the volume of water generally lowers the natural frequencies. Furthermore, one observes that the added mass has different influences on the varying modes. A general conjecture might be that the more fluid has to be agitated through the mode, the stronger the influence on the natural frequencies.
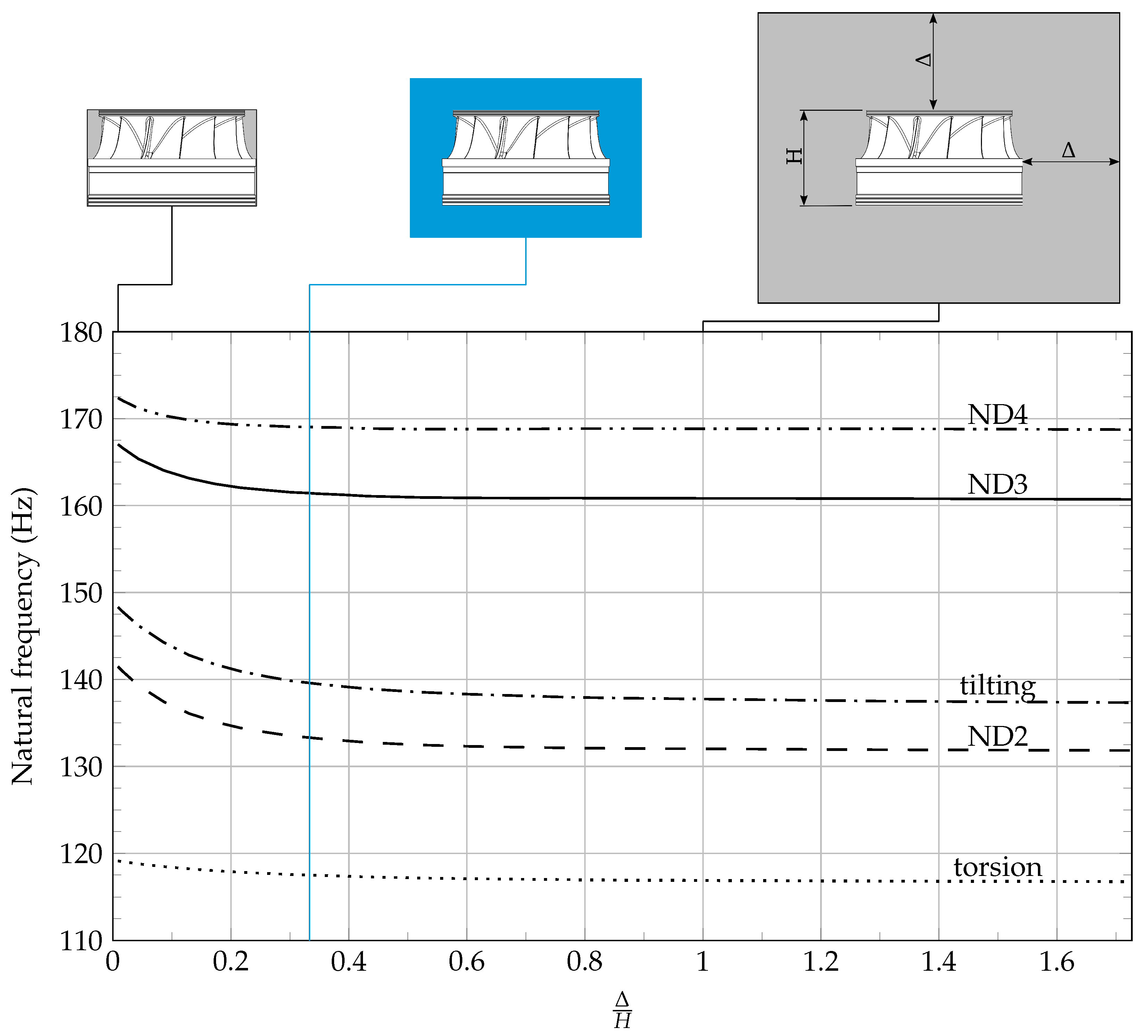
In a second step, the influence of the cylinder-size should be investigated. Therefore the modal-analysis was performed with various sizes of the water cylinder.
Figure 11 represents the result that the water masses around the runner affect the natural frequencies only to a specific size. Above this value, the impact of the added mass effect will not change.
Figure 11 has a practical influence of modeling such cases. If the surrounding volume is to low the results are not independent anymore but calculation time will be lower. On the other hand, very large water volumes will only extend the calculation time whereas the result will not increase accordingly. To balance water volume, respectively, mesh size and simulation time it is necessary to know the limits. If
the failure would be quite high.
Restrictions/Dependencies
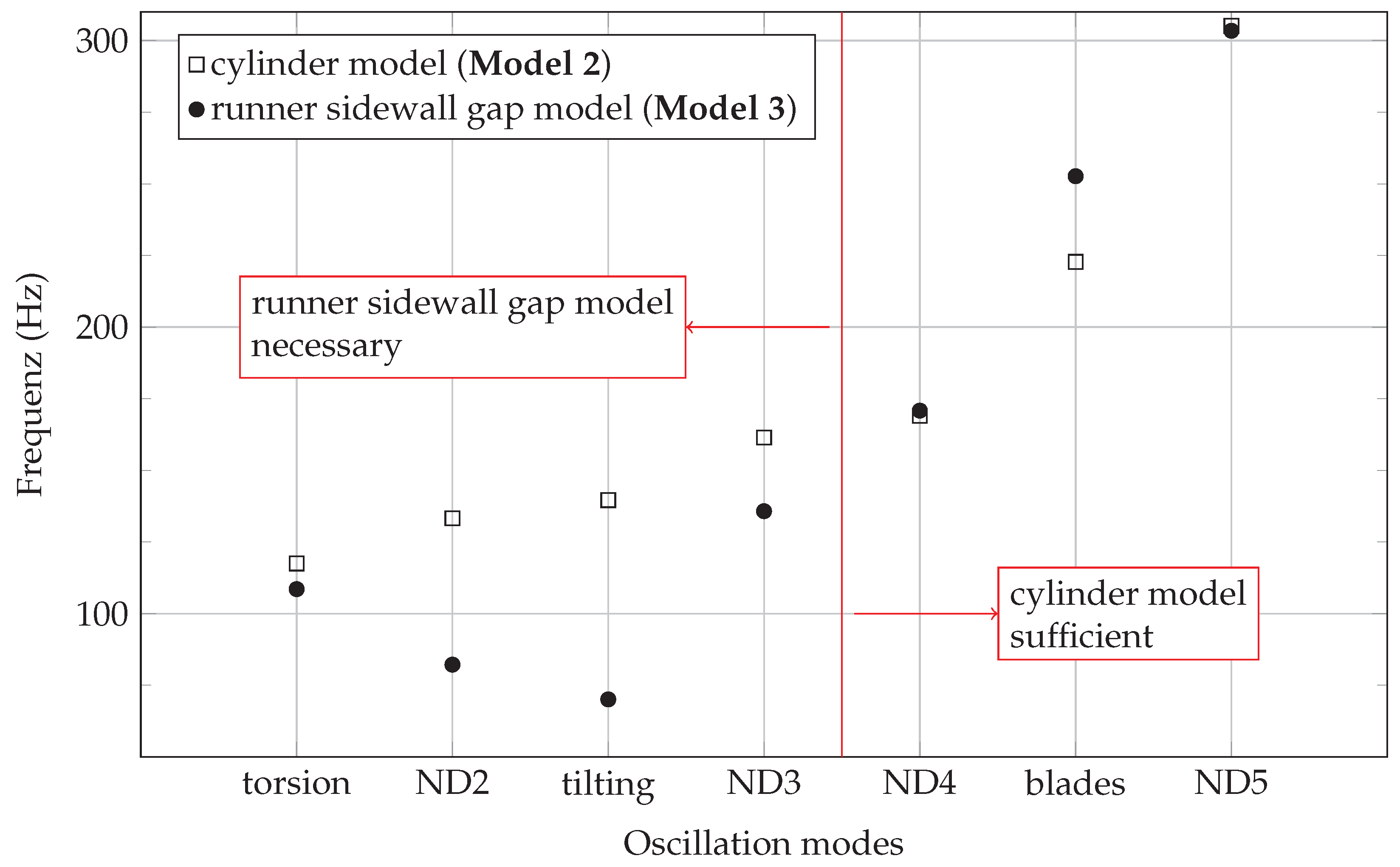
Figure 12 shows the impact of the added mass effect on the runner related to the oscillation mode. For nodal diameter (ND) modes, one can conclude that concerning
or less, it is necessary to use runner sidewall gap model (Model 3). For modes with
or more, the cylinder model (Model 2) is sufficient. The explanation is based on the fact that higher nodal diameter modes fulfil a smaller structural displacement, and therefore the impact of the small gap decreases.
3.2.3. Draft Tube
Description of model
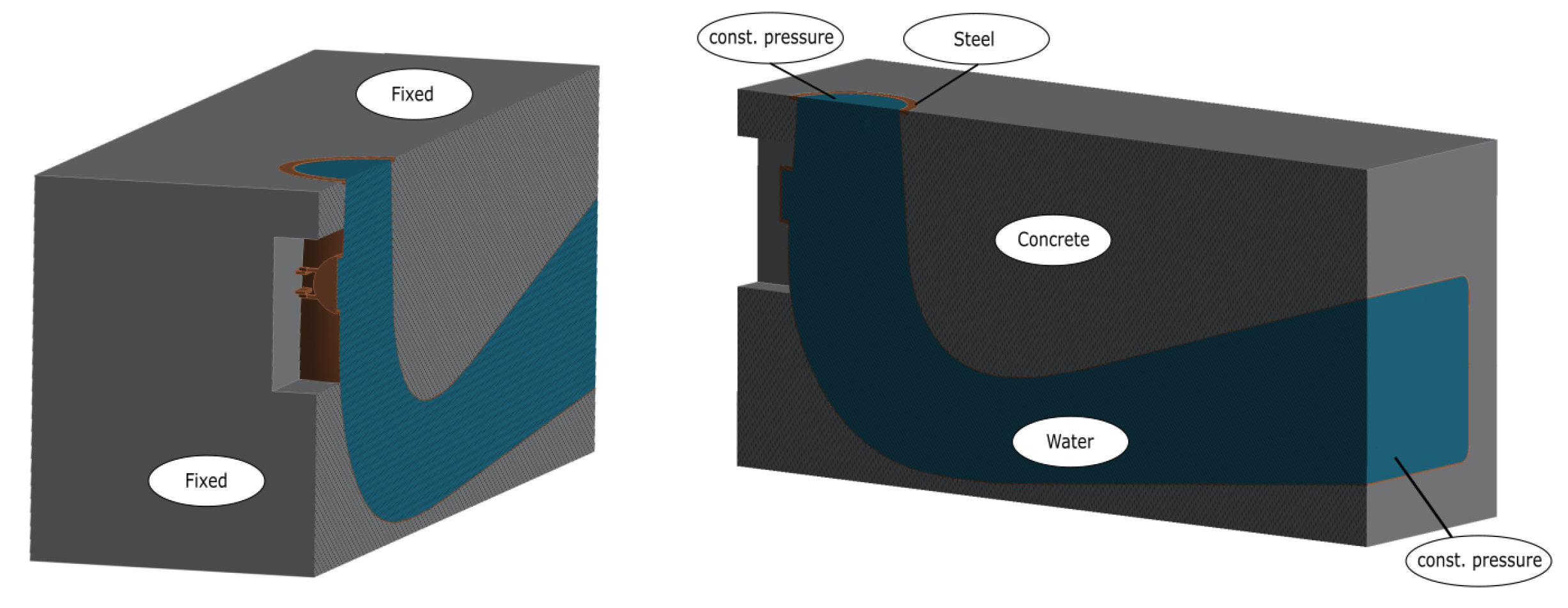
To determine the natural frequencies of the draft tube a model with three parts (see
Figure 13) was used, e.g., the draft tube (red) itself, the enclosed water volume (blue) and the surrounding concrete (grey) foundation. As the entire model consists of solids and liquids an acoustic element approach was selected. The used material parameters and element types for each part are shown in
Table 4. Boundary conditions on the concrete foundation’s outer side remain fixed (translation and rotation fixed) conditions. This assumption is reasonable since the model only displays a section of the entire rigid plant. Between the concrete foundation and the steel-lined draft tube, a bonded contact was chosen. Since the water and steel domain use different element types, the importance of conforming meshes is obvious. The conforming mesh is needed for the Fluid-Structure Interface (FSI) in that way that forces and displacements can be exchanged easily between the domains. Constant pressure was applied at the involved outlet of the fluid domain.
Even if
Figure 13 might suggest using only half of the model and placing symmetry conditions at the cutting plane instead, this option was not used, as information loss about possible eigenmodes and wrong calculated natural frequencies could occur. The mesh consists of quadratic tetrahedral elements SOLID187 for the concrete and draft tube part, whereas FLUID221 elements were used for the water volume. The element size for the water volume was selected according to the wavelength of the highest frequency of interest. Internal rules suggest an element size being at most a sixth of the wavelength.
Boundaries/effects
Added mass effect
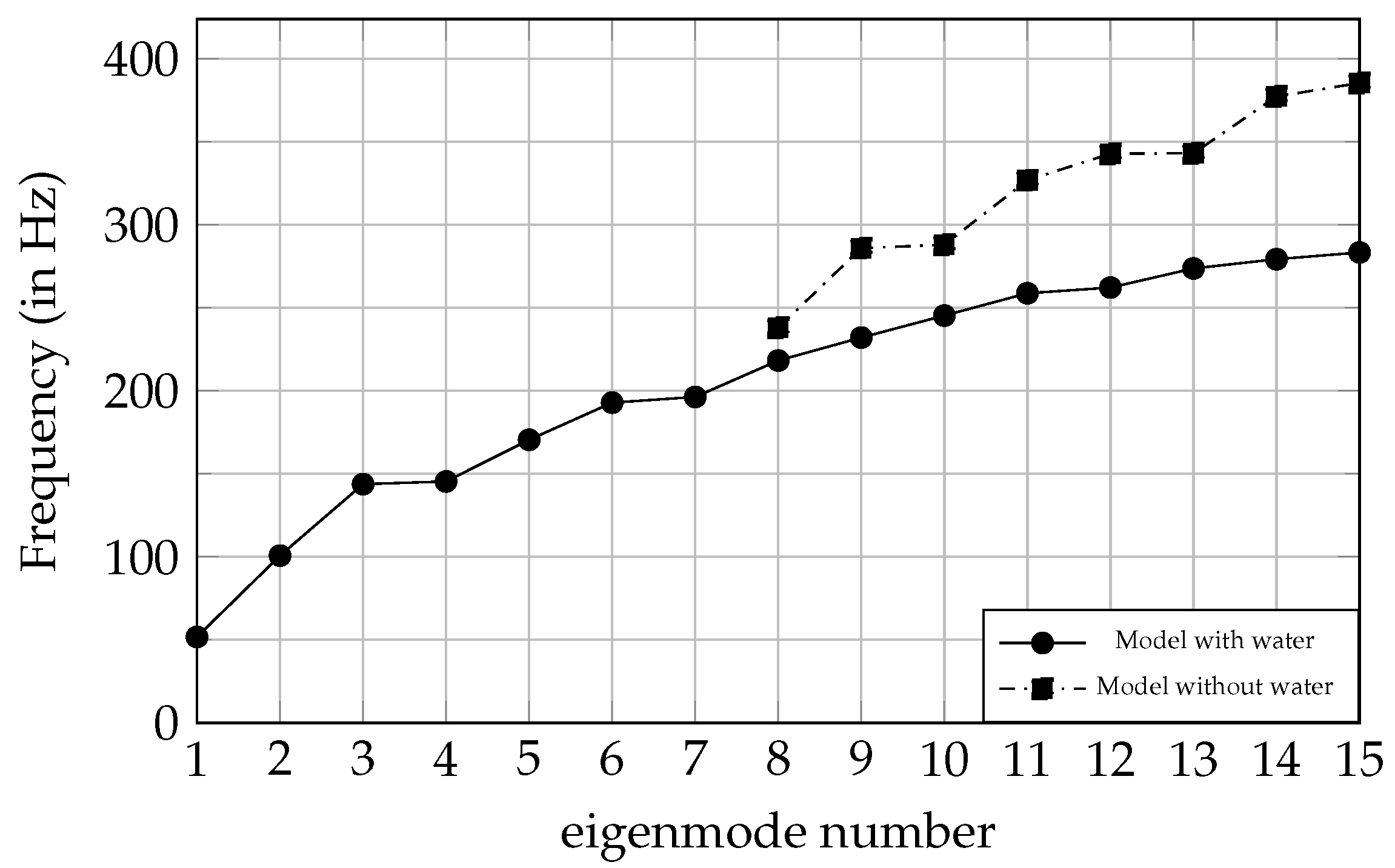
Determining the effect of the added water volume on the natural frequencies needed two simulations to be run. One with the enclosed water volume and one without it.
Figure 14 shows the natural frequency related to the eigenmode number. One can observe that the natural frequencies of the model with water start at a noticeably lower frequency. This model’s first eigenmode is found at 51.75 Hz compared to a model without the water volume having its first natural frequency at 238.97 Hz.
As the mass of the model with water is more significant than without it, the natural frequencies get substituted. This effect was called added mass effect and was first found by Stokes in 1851.
Mesh size effects
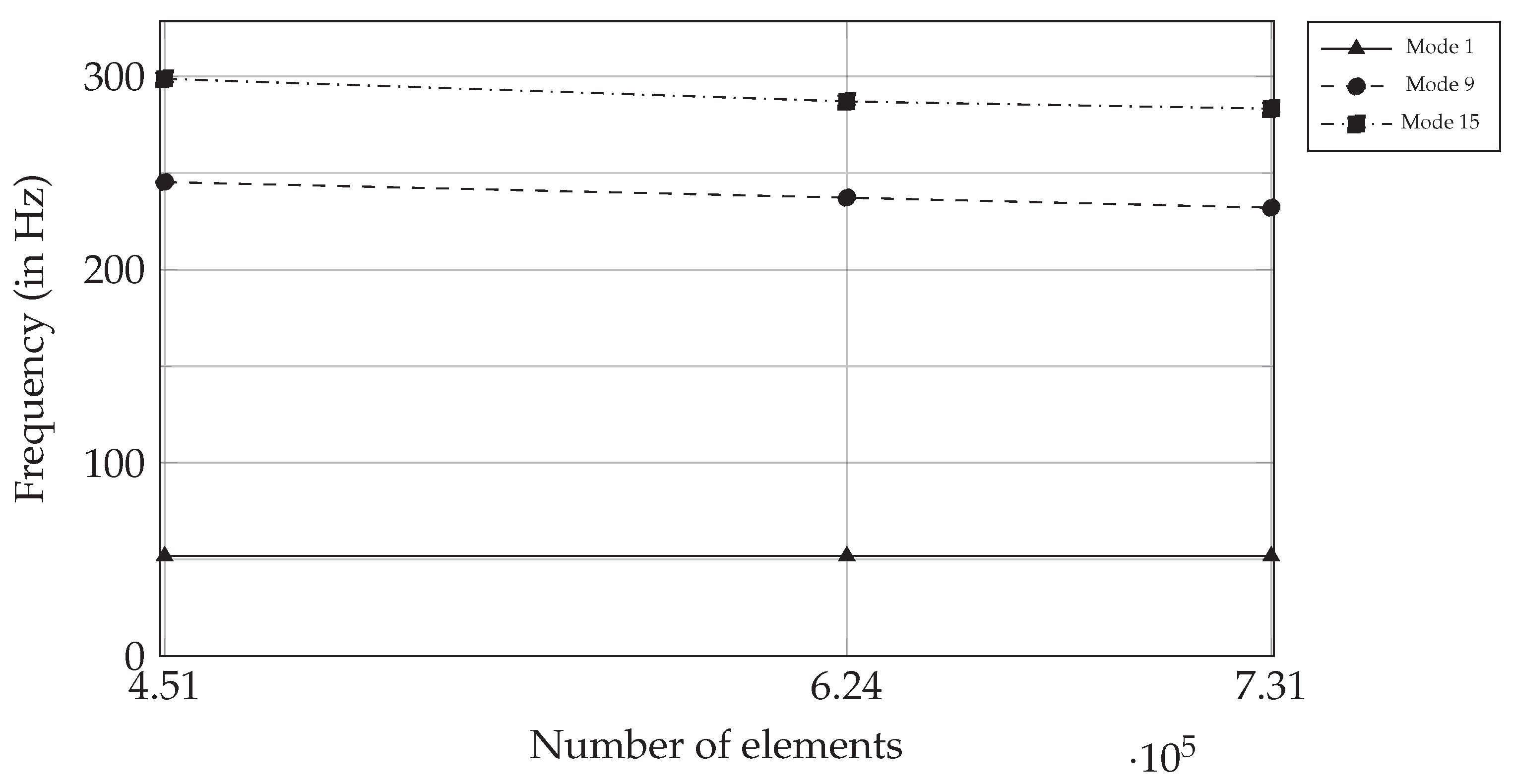
A mesh independency study ensures that the results do not rely on the mesh size. Different mesh sizes and results are shown in
Table 5 and plotted for three eigenmodes in
Figure 15. The interpretation shows that lower natural frequencies result in a lower impact on the mesh size. With increasing frequency, the solution gets more sensitive to the mesh sizing. Due to memory constraints on the workstation, a tighter mesh could not be simulated. Although a smaller mesh size would be required to show a better convergence, the decreasing tendency leads to a convergent consideration.
Boundary influence of the concrete section width
Modeling the steel casing including the attached parts, the influence of the concrete foundation on the natural frequencies of the draft tube exit was considered by a sensitivity analysis. As the concrete foundation connects to other parts of the power plant, the width plays a vital role. To answer this question, three different models (see
Figure 16) with widths of 6000, 7000 and 8000 mm were simulated, and the first 15 natural frequencies evaluated. Out of the 15 natural frequencies, only three, namely 1, 9 and 15, were taken into account for further reflections. The results can be found in
Table 6. The width of the draft tube exit has no significant influence on the lower natural frequencies and eigenmodes. This changes with higher eigenmodes as
Table 6 shows. The reason could be the stiffness of the material.
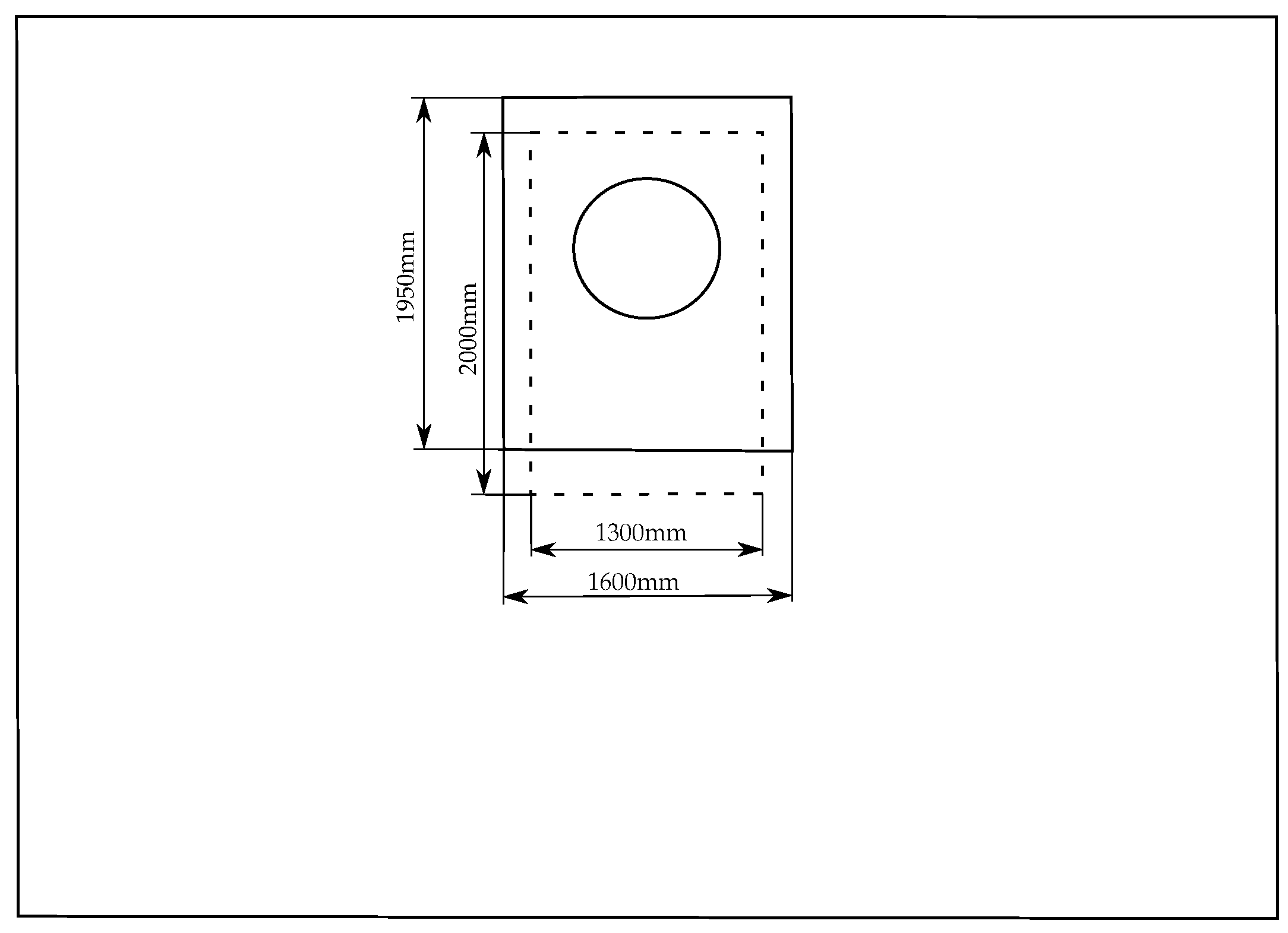
Influence of the draft tube access area
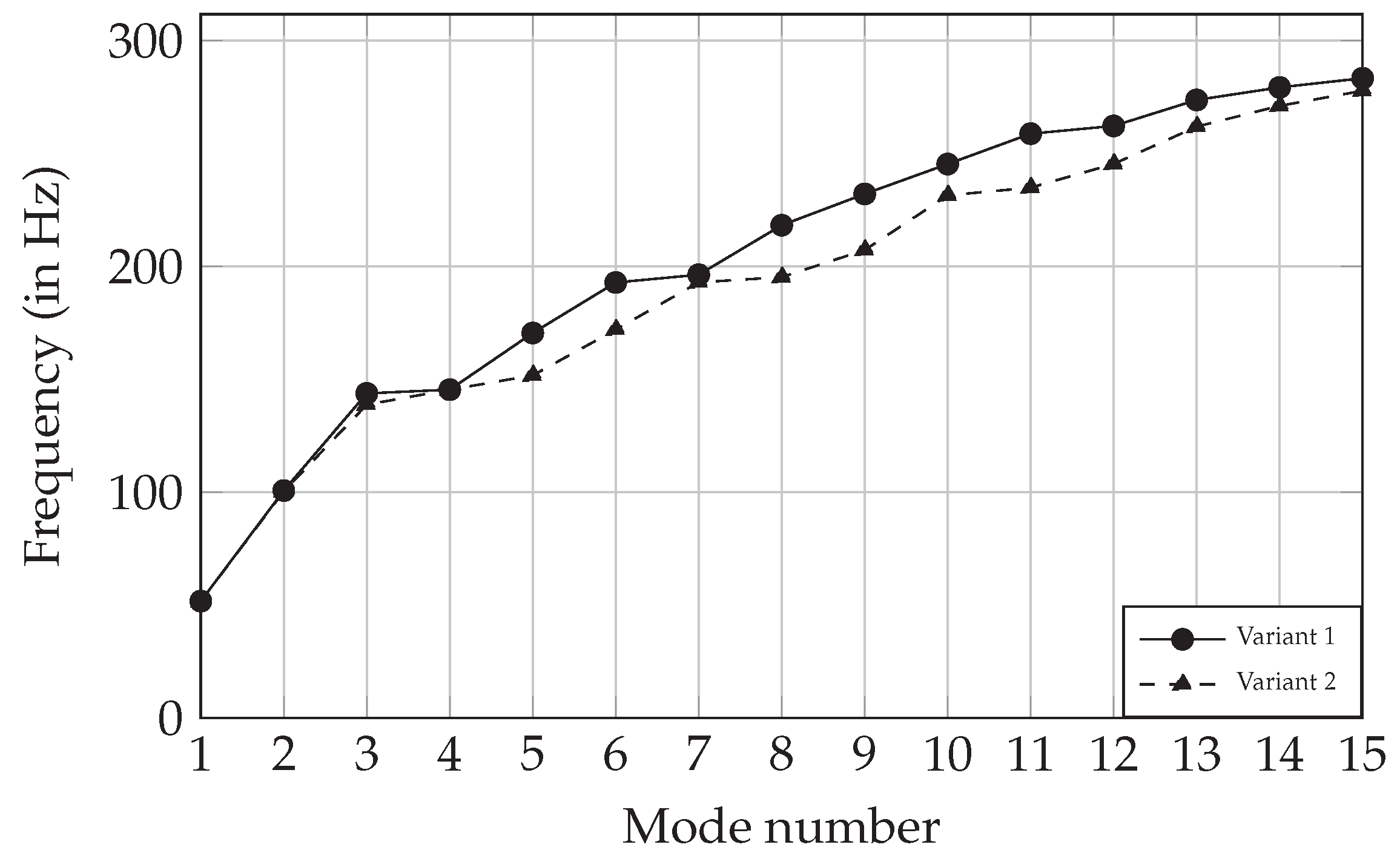
As the draft tube access area giving way to the maintenance hole cover is an essential part of the concrete foundation, a variation was investigated. Two models with different positions and dimensions were simulated.
Figure 17 illustrates the difference between the two models. The solid line shows variation one and the dashed line variation two. The frequencies of the respective modes are plotted in
Figure 18. One can see that the difference is negligible in the first four modes. As the frequency increases, the difference becomes bigger and bigger. The largest difference between the two models is 12.4% at mode 8.
Restrictions/Dependencies
As seen before, the concrete width and the draft tube maintenance hole’s access geometry influence the natural frequencies of the draft tube. The access area’s geometry is essential since it can lead to significant deviations of the natural frequencies. Therefore one should be very careful at creating the model as realistically as possible in terms of dimensions and positions.
3.3. Finite Element Analysis (FEA)
To numerically record the effects of occurring flow phenomena on the runner’s structure and lifetime for the entire operating range of the hydropower plant 2, from low partial load to overload, transient CFD-simulations were coupled with transient FE-simulations (see
Figure 1). For this purpose, the program ANSYS Mechanical Version 2019 R3 was used to perform separate transient simulations for each operating point between
= 7–105%. The chosen simulation length corresponds to 5 runner rotations at a defined step size of 3 degrees. Occurring damping effects were taken into account according to [
30,
40] using the simplified approach of Rayleigh damping.
3.3.1. Description of Model
The general procedure and setup for model construction and meshing has already been published in [
28,
35,
41] and was carried out analogously. The mesh consists of quadratic tetrahedral elements with about 0.6 million nodes. As with Eichhorn [
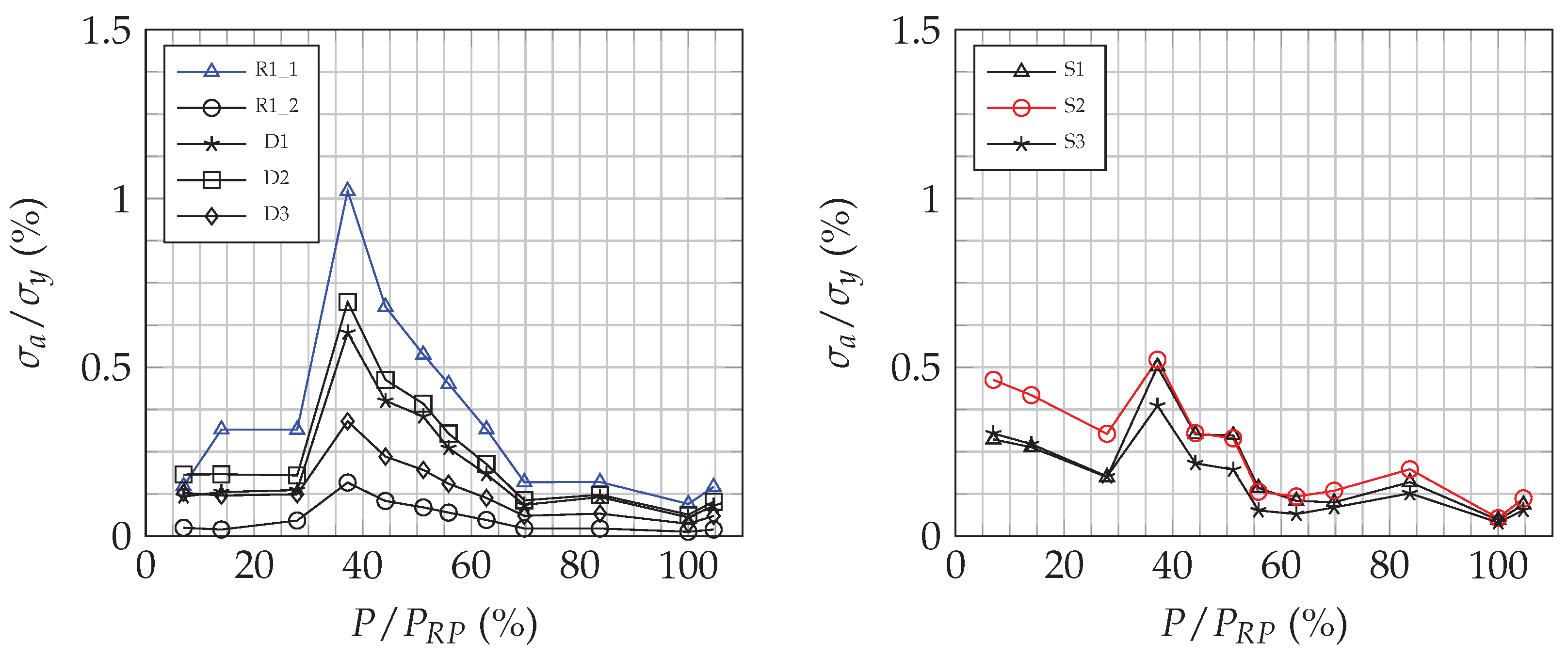
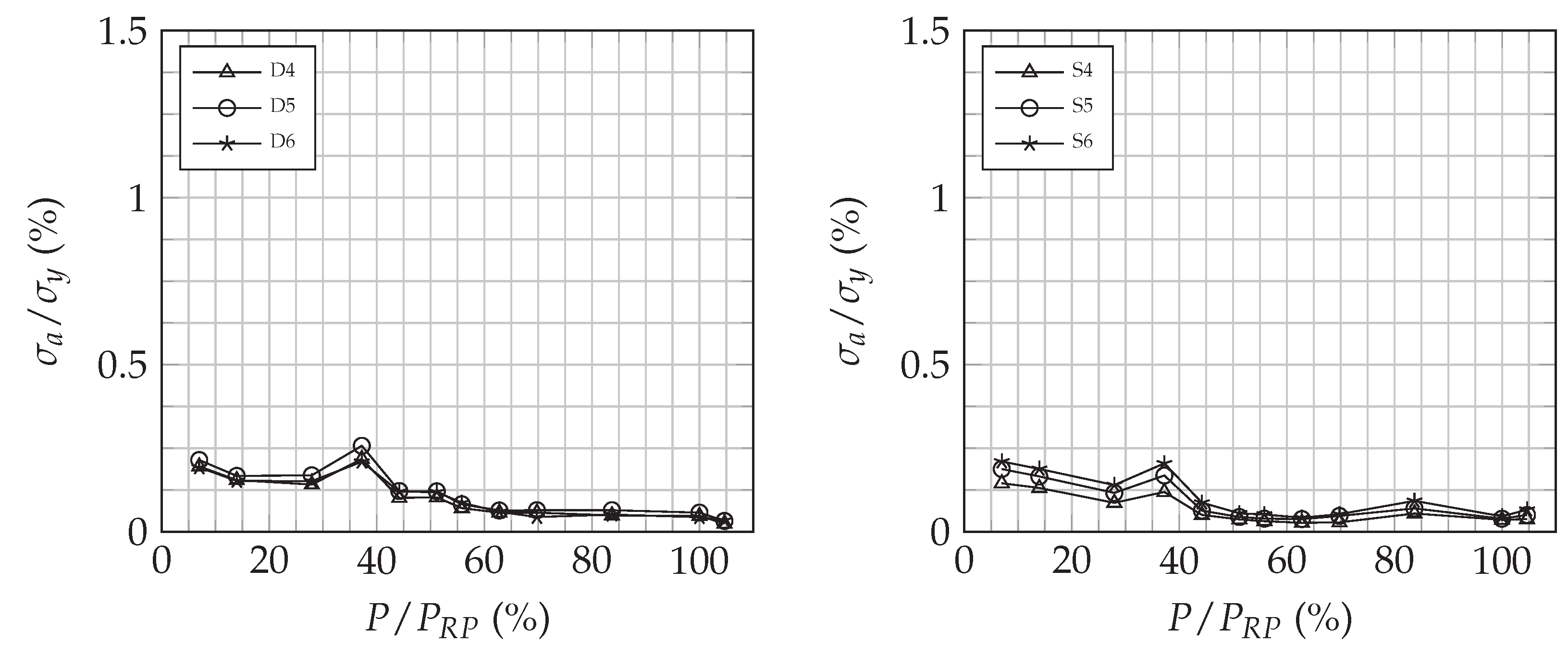
41], only one of the runner blades received an additional local mesh refinement, especially at the transition to the runner hub and shroud, at the leading and trailing edges and around the defined strain gauge positions. For validation of the FE-model, the stresses obtained from the strain gauge measurements, shown in PART III of this publication series and [
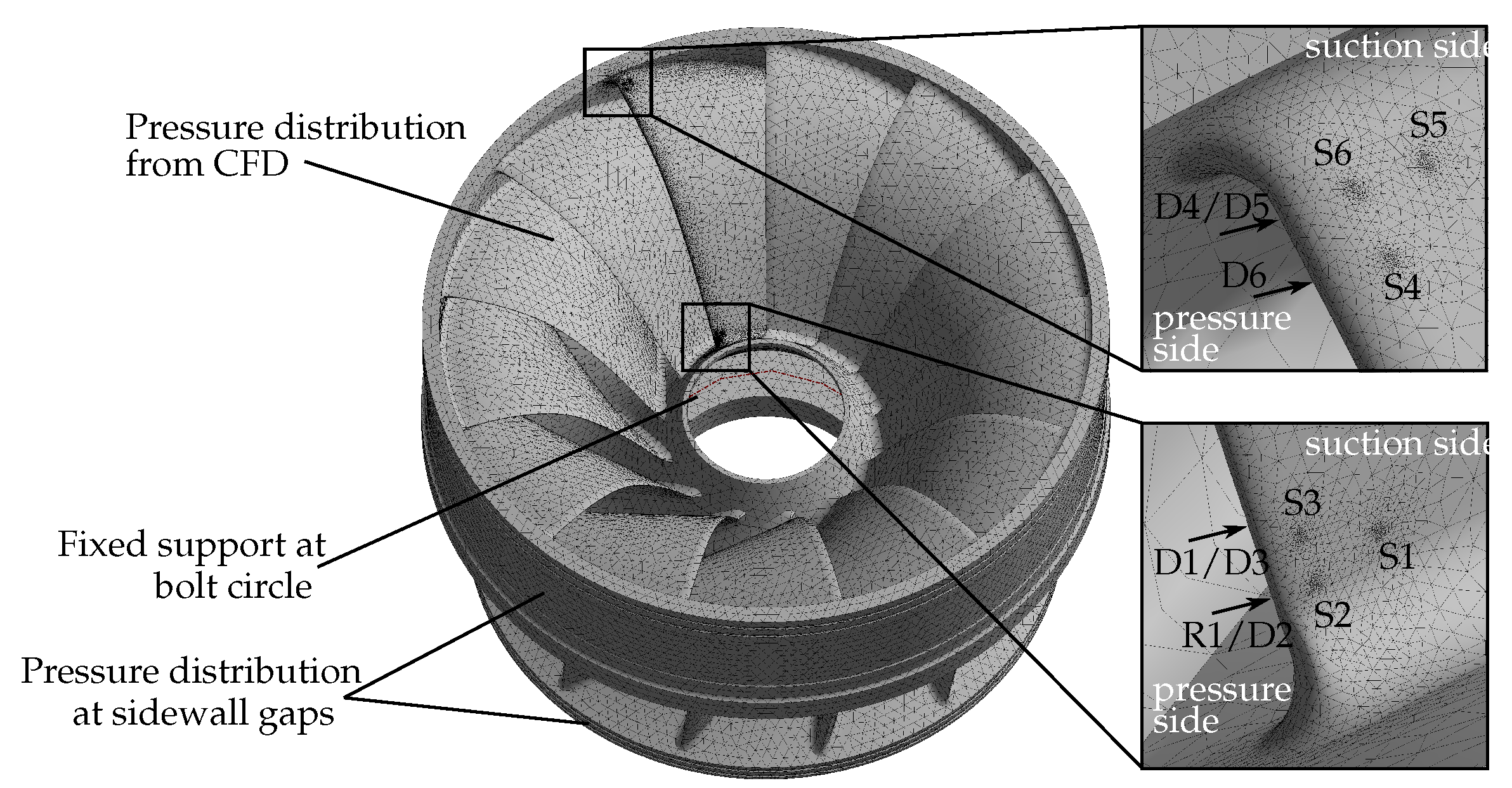
42], are used. For this reason, the simulation model includes evaluation surfaces with an analogous position, orientation and dimensions of all strain gauges used during measurements (see
Figure 19). The mechanical data of the runner material X5CrNi13-4 are Young’s modulus E = 216,000 N/mm
2, Poisson’s ratio
= 0.3 and density
= 7700 kg/m
3.
3.3.2. Boundaries
In addition to the meshed structure, material properties and computational resources, the following boundary conditions (see
Figure 19) are required for the successful realization of the numerical simulations:
- ❶
Pressure distribution from CFD
The pressure loads determined by transient CFD simulations at each load step are applied to the runner as a boundary condition using unidirectional fluid–structure coupling in the FE analysis. As the fluid and structure meshes at the coupling interface differ, triangulation (see Part I, Section 3.1.2) was used for data interpolation between the nodes.
- ❷
Pressure distribution at sidewall gap
The pressure distributions were analytically calculated according to Paulitsch [
43], based on Gülich [
44], and were applied to the FEA model. The methodology itself was investigated and validated at a laboratory model runner [
45].
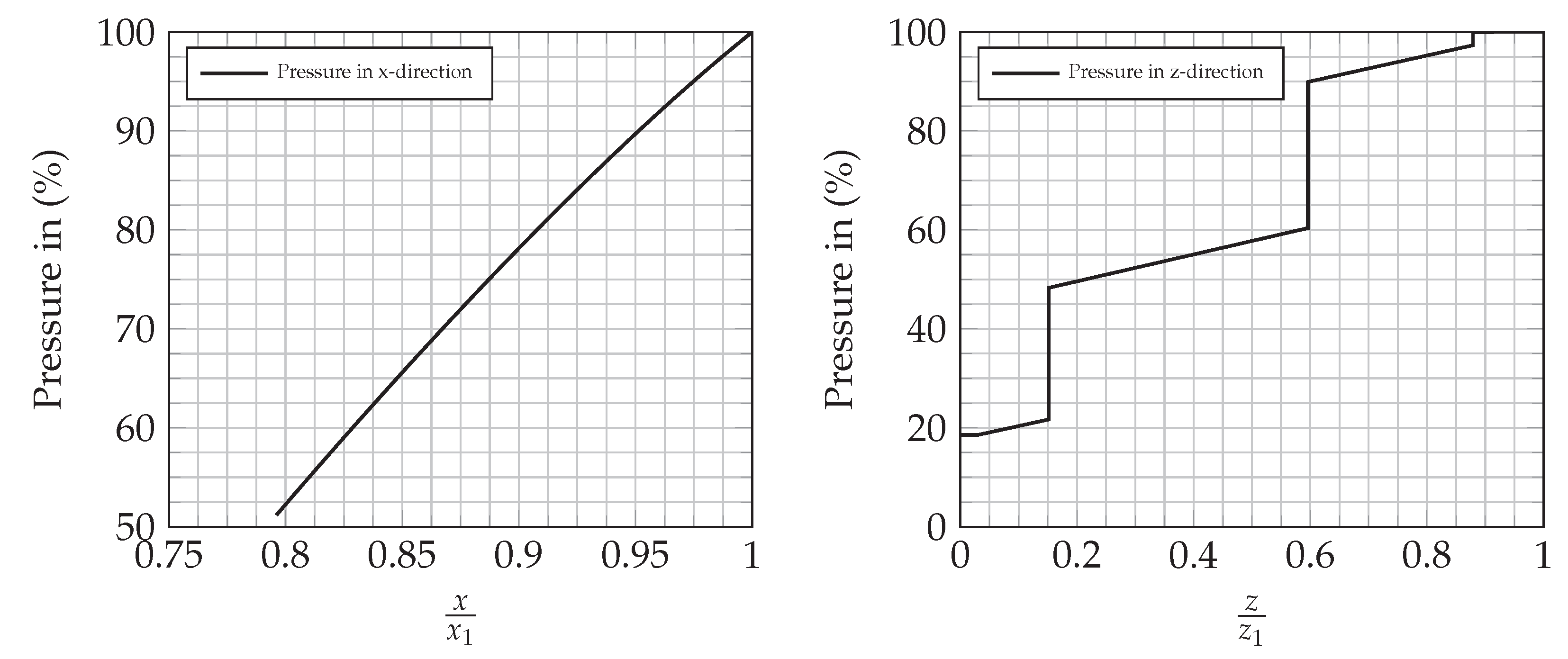
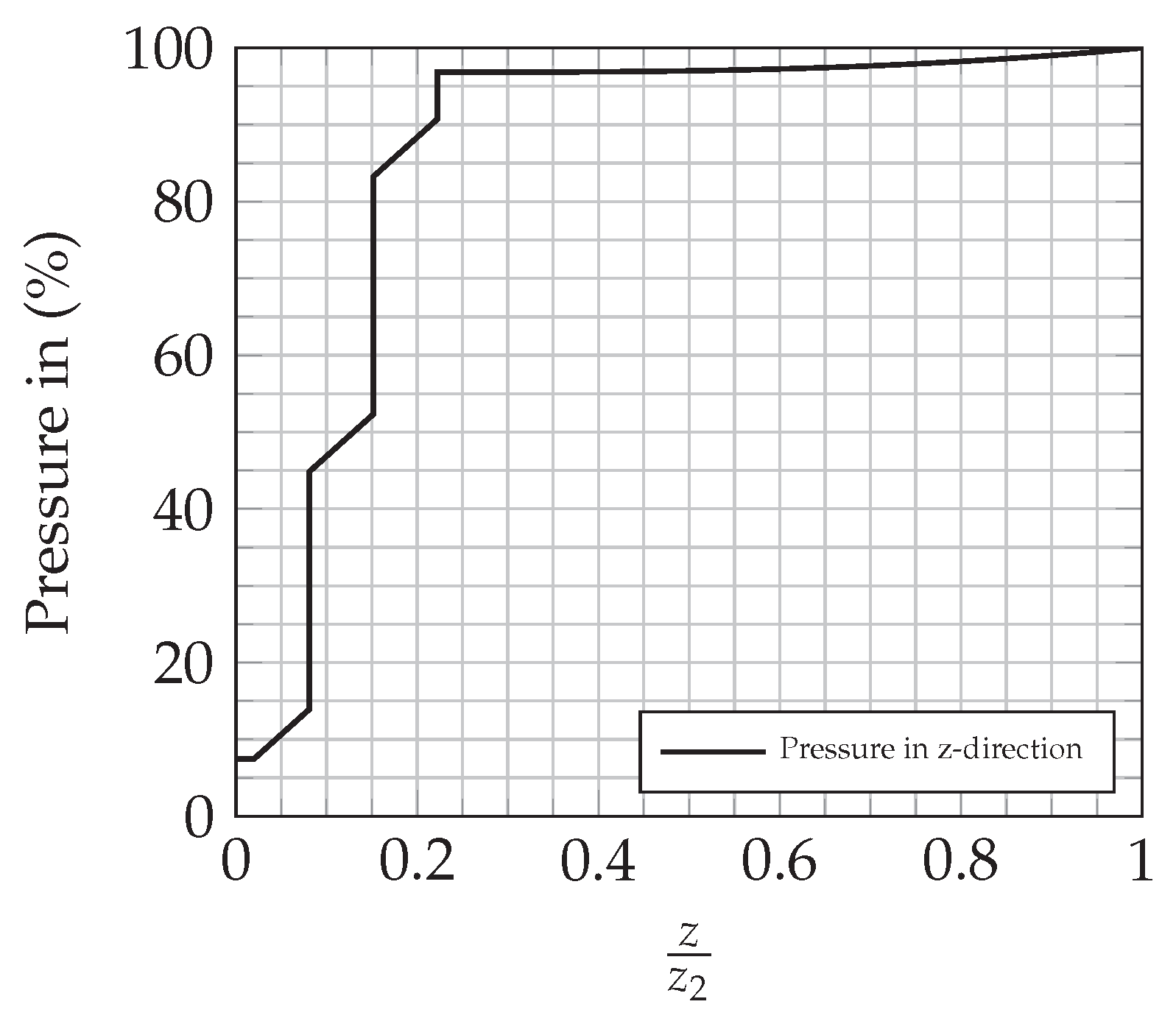
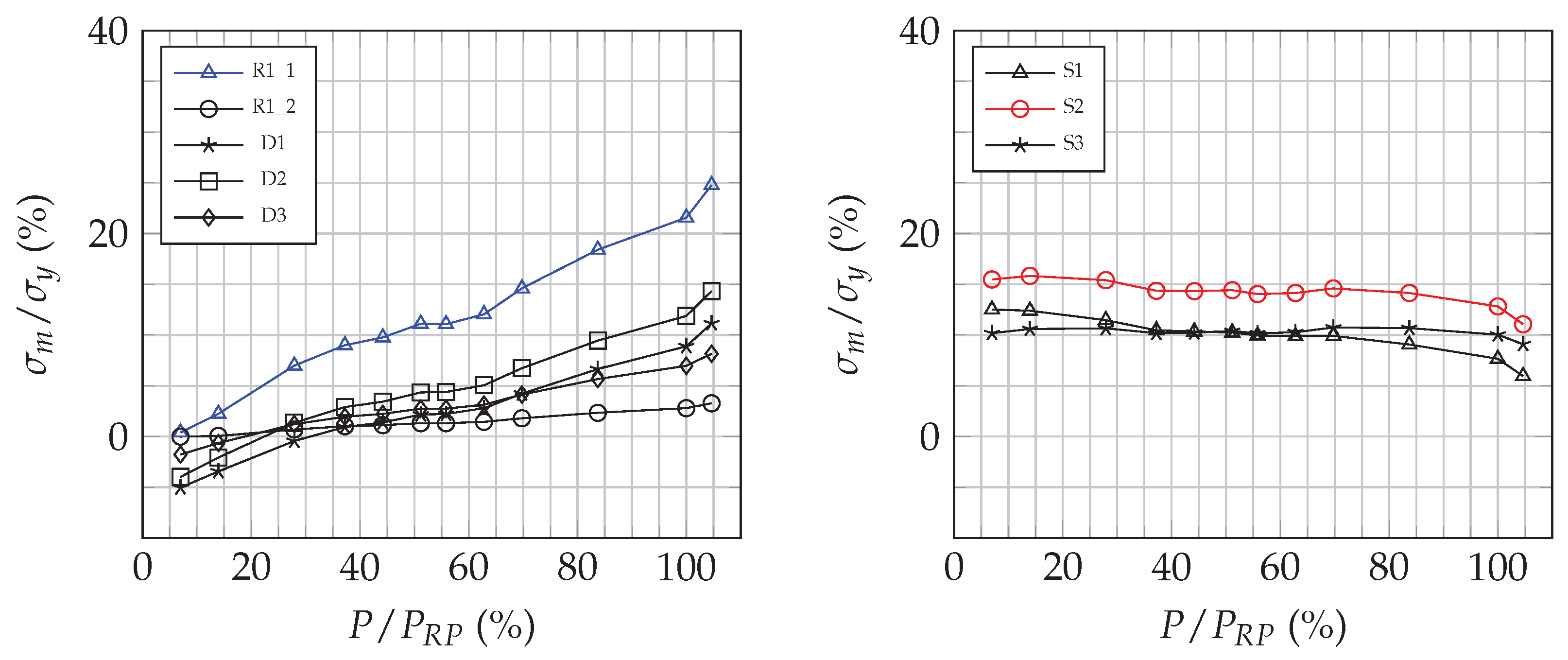
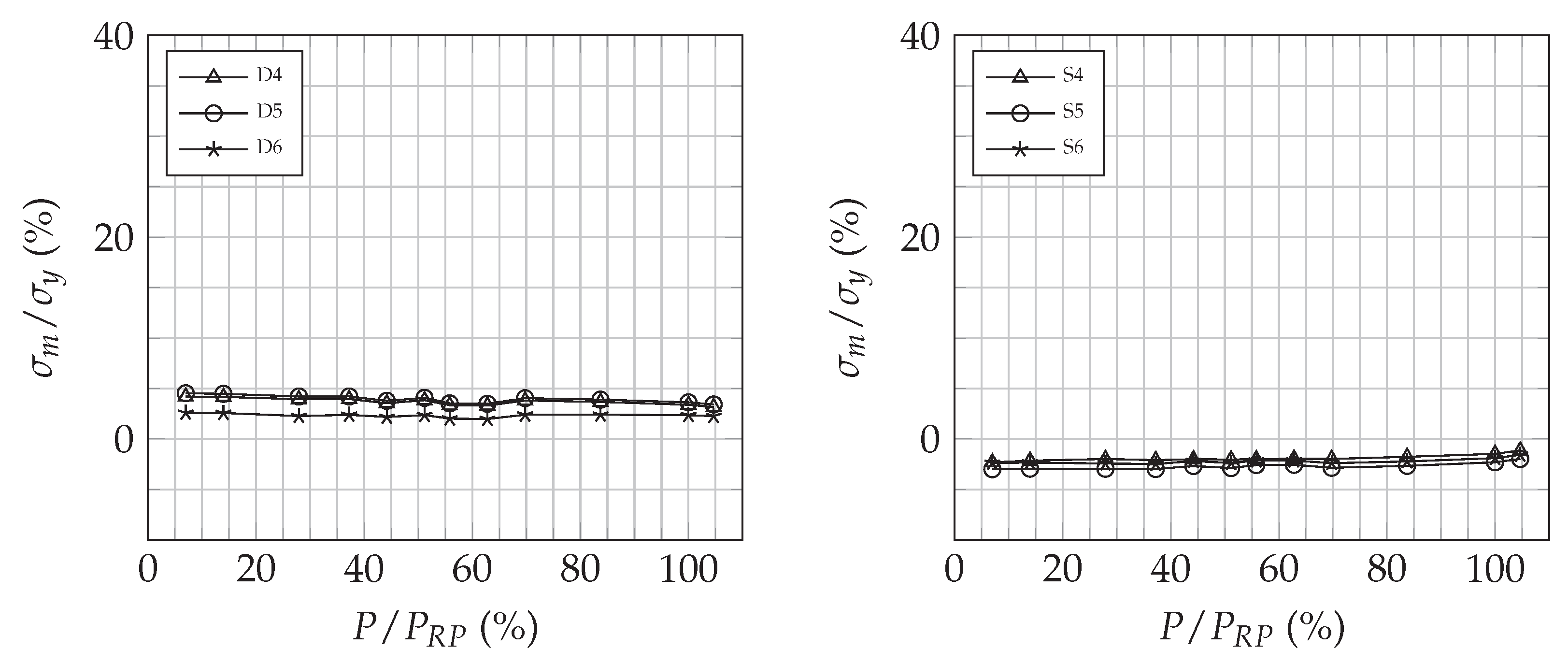
Figure 20 and
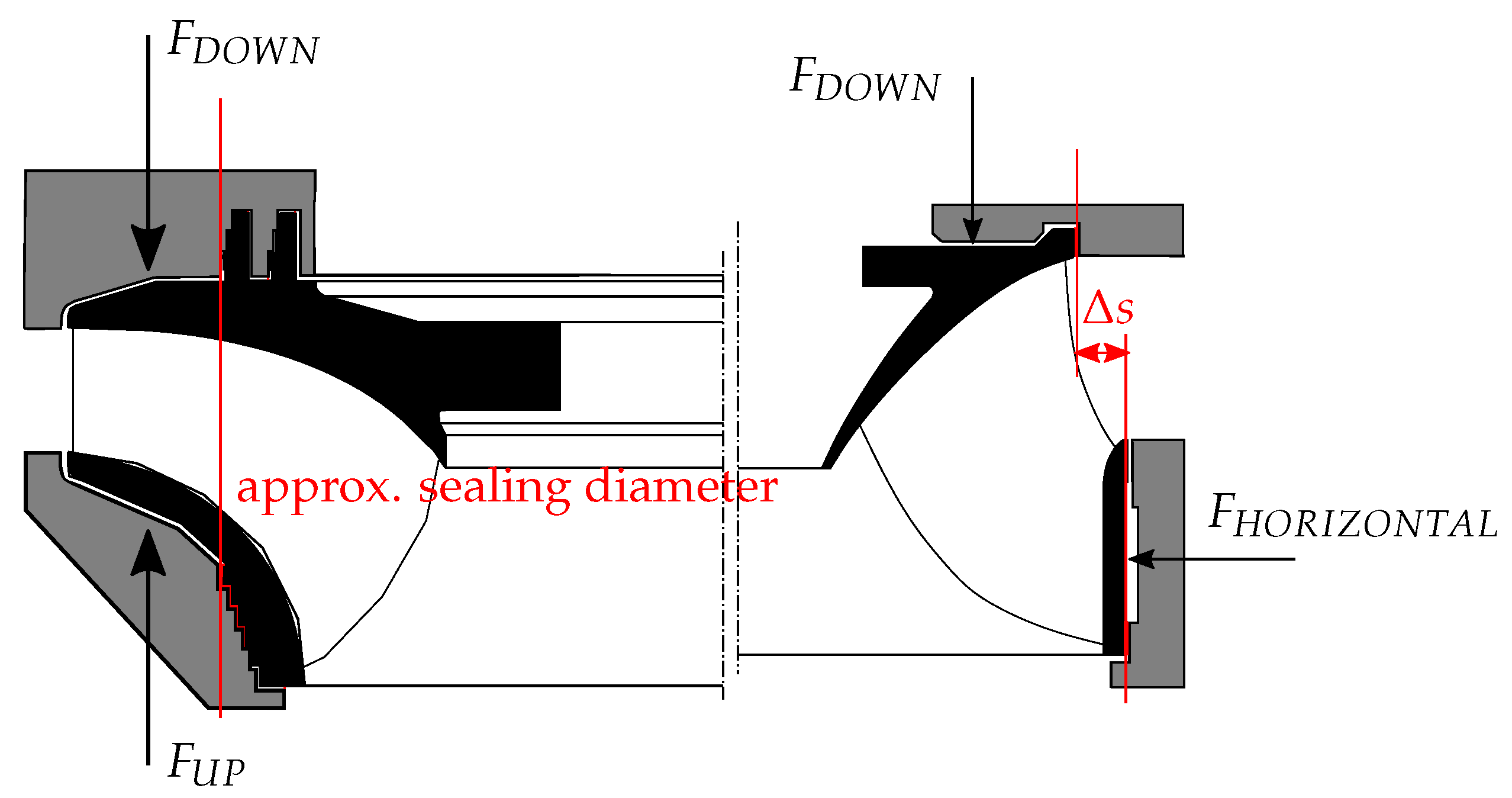
Figure 21 show the pressure distribution of the runner’s shroud and hub sidewall gaps in hydropower plant 2. The pressure distributions clearly show the labyrinth seals’ positions, where the pressure is reduced to the appropriate level. Contactless labyrinth seals ensure, on the one hand, a targeted pressure drop, while on the other hand, they are also characterized by the fact that there is a forced leakage flow
. It is energetically unused and therefore considered as external loss. Depending on the pressure difference between the runner sidewall gap inlet and outlet, the causal relationship for the pressure drop
can be reflected as:
where
in (Pa) is the pressure drop between in- and outlet of the sidewall gap,
is the sidewall gap resistance number,
in (kg/m
3) is the density of water and
in (m/s) is the velocity of the fluid within the gap. With
where
in (m
2) is the sealing gap cross section, Equation (
2) can be transformed to:
Based on Equation (
4), one can observe that the leakage flow depends on a linear term, which represents the sealing cross-section, and a non-linear term, which contains the pressure difference and the resistance coefficient. Additional time dependence of the formula increases the complexity of the investigated correlation. A good review about the internal flow, arising unsteady flow phenomena and impact on runners axial thrust forces is shown in [
46].
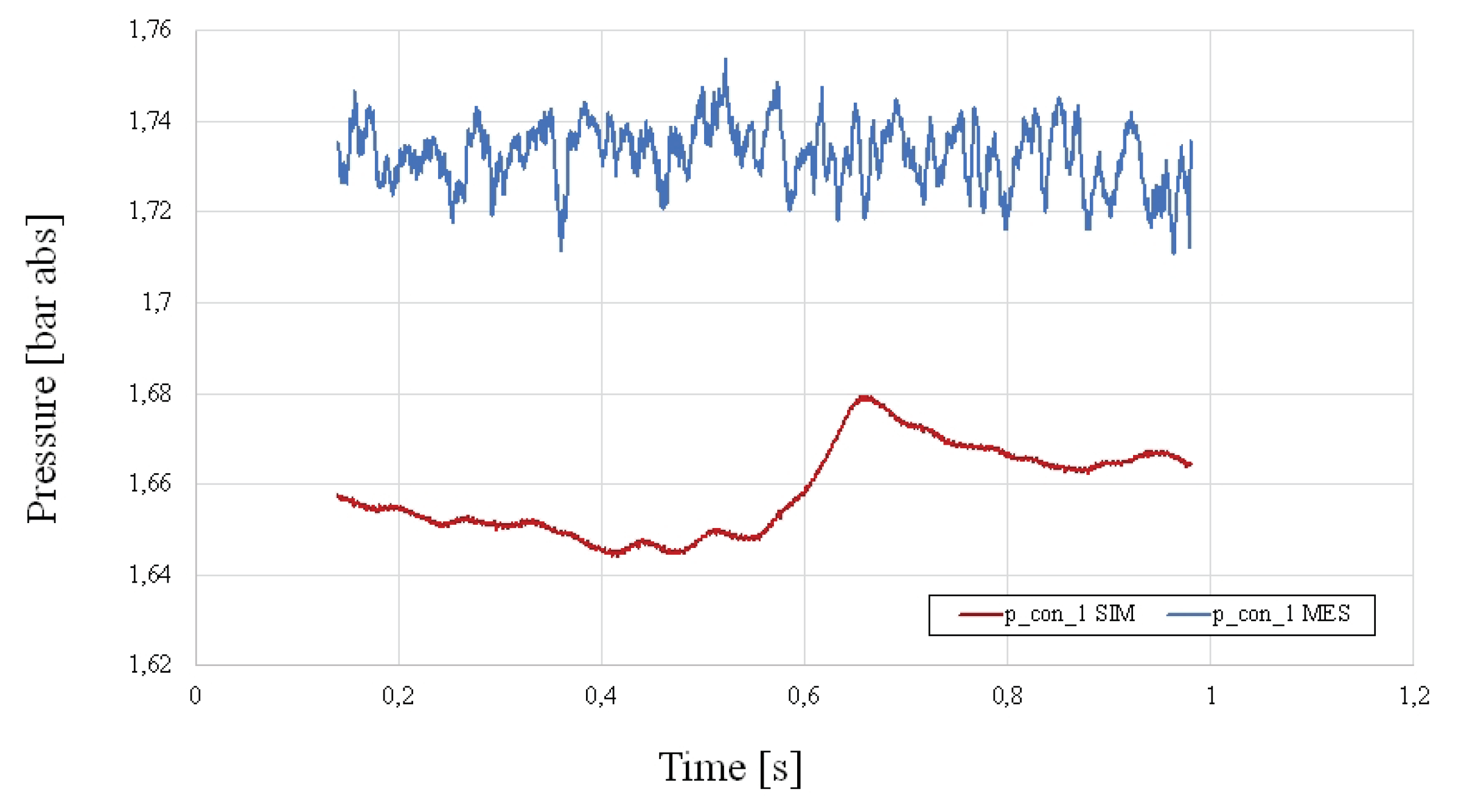
Within the framework of the research project MDREST, prototype site measurements for validation purposes were performed. The background is the validation of the correlation between leakage flow
and the pressure drop
. The integrative part of this observation was a sensitivity analysis of the most influencing parameters. It was observed that the numerically calculated leakage flow
through the runner sidewall gaps deviate from the measured values
. One possible reason for this is the runner orbit and therefore change of the sealing gap during turbine operation. Investigations showed that this change influences the leakage flow but less the pressure distribution in the sidewall gaps. Important influencing parameters on the numerical calculation of the pressure distributions are the inlet and outlet pressure of the runner sidewall gaps, which are however given parameters for the numerical calculation [
47].
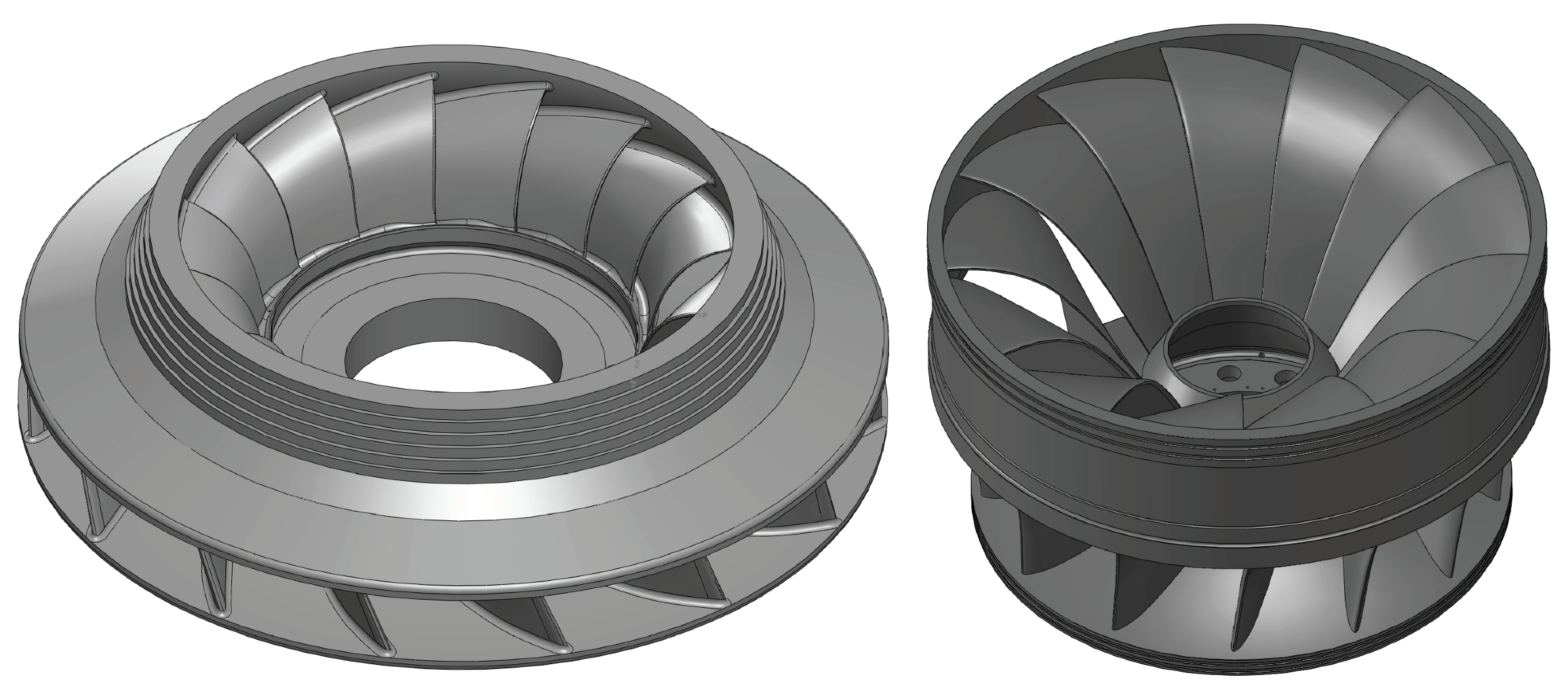
For the subsequent fatigue analysis, it is essential to apply the correct pressure distribution at the runner’s sidewall gaps. Since most of the pressure is released in the labyrinth seals, the turbine and sealing design has a considerable influence. Currently investigated turbine runners and their sealing positions within the runner sidewall gaps are shown in
Figure 4 and
Figure 5.
- ❸
Fixed support at bolt circle
The runner is fixed at the bolt circle towards the turbine shaft. Rotational as well as gravitational forces are taken into account. Optimization potential would be here the consideration of the screw connection or at least a circular ring approach in the size of the bolts diameter instead of using a circle. Such an approach would give a more rigid fixation then the circle one.
3.3.3. Investigated Operational Points
The FE analyses’ scope was investigating those operational points where the electrical grid synchronized machine was adapted to load changes. See also
Section 3.1.4. The calculation of the mechanical stresses at the runner during the transient operating changes was too extensive in terms of simulation time and memory capacity.
The transient FE simulations follow the description of Section 4.2.2 of Paper I.
3.4. Lifetime Prediction
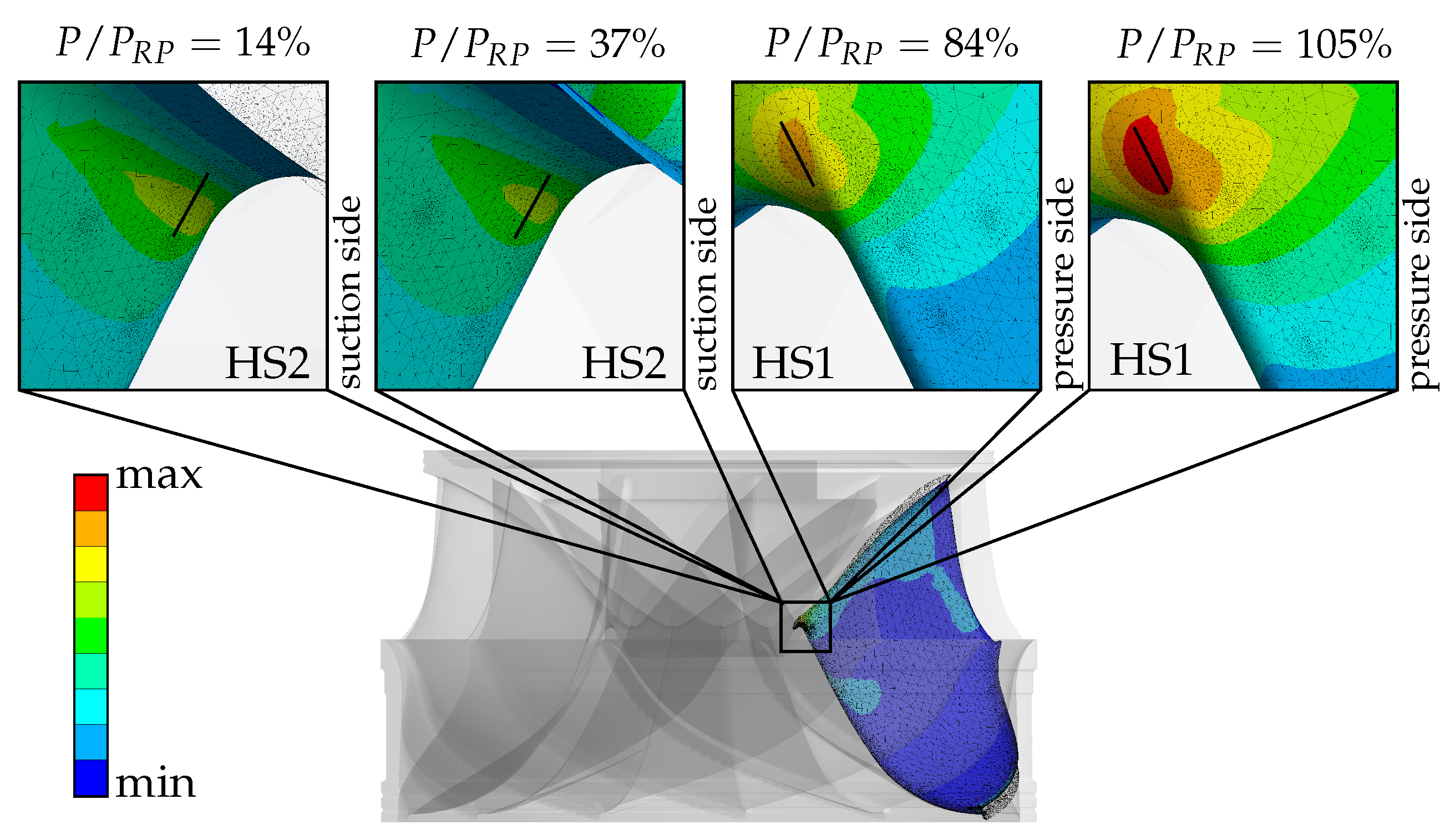
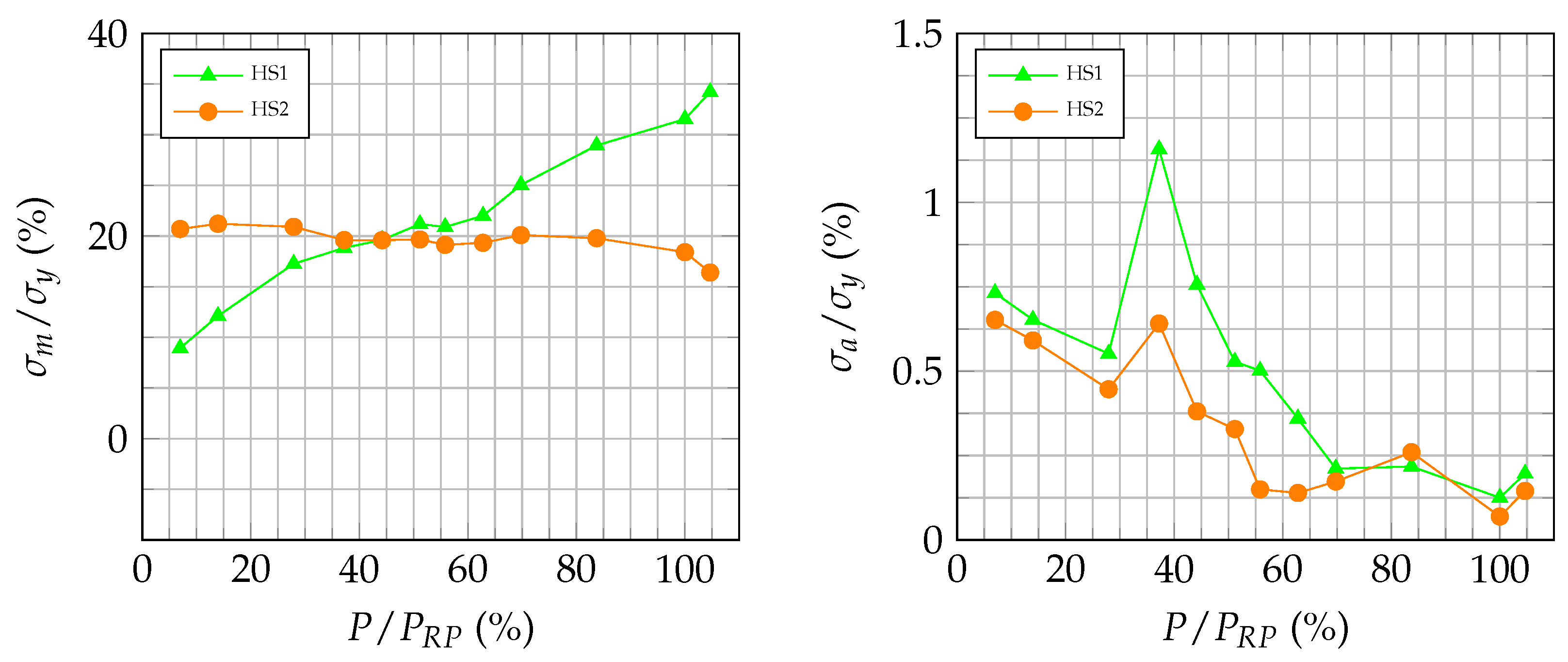
The lifetime prediction uses the damage accumulation hypothesis presented in Section 3.2.2 of Paper I. Utilizing the introduced transient assessment method offers the advantage of investigating all exciting frequencies of the occurring flow phenomena instead of single ones. Therefore the numerical method is equivalent to the measurement. The benefit is now the suspension in stress evaluation to the position of the strain gauges. Lifetime prediction is evaluated at the hotspots of the structure.


 ,
, 































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}








