1. Introduction
Coal is the most abundant fossil energy in the world and occupies a dominant position in world primary energy consumption [
1]. Thick coal seam mining area is extensive and abundant in China [
2]; the fully-mechanized top coal caving technology in thick coal seam mining method has obvious advantages [
3,
4,
5], and the realization of its automation can achieve high yield, high efficiency, safe operation, and other effects. The coal gangue identification technology is the key to fully-mechanized top coal caving automation mining technology; when the gangue in the caving rock mass reaches a certain proportion, it is necessary to close the coal opening in time [
6]. However, due to a lack of breakthroughs in coal gangue identification technology, the current level of intelligent coal caving is still low and the closing time of the coal opening can only be judged by the underground workers on the basis of sight or hearing, resulting in coal waste and coal quality reduction [
7]. Therefore, the study of coal gangue identification technology is of great significance to top coal caving mining.
To improve the accuracy and reliability of coal gangue identification, many scholars have carried out a lot of research. Wang [
8] proposed a recognition method based on dielectric and geometric features and obtained dielectric features by variational mode decomposition, which effectively solved the problems of difficult feature extraction and low recognition accuracy of coal gangue particles. Wang [
9] proposed a method to calculate density based on the volume calculated by 3D laser scanning technology, which effectively solved the problem of separating gangue from coal. Wei [
10] proposed an improved empirical variational mode decomposition method for ultrasonic echo signal processing of coal and rock strata. This method combines peak focusing imaging technology and an asymmetric Gaussian model, which can effectively identify the coal–rock interface. Based on the relationship between different dielectric constants, conductivity, attenuation coefficient, and emission frequency when electromagnetic waves propagate in the medium, Chen [
11] established a coal gangue–rock geological model based on geological parameters and verified the applicability of electromagnetic wave coal gangue interface identification. Because of the significant differences in some signals under different cutting ratios, Wang [
12] proposed a new dynamic identification method of coal–rock interface based on adaptive weight optimization and multi-sensor information fusion based on particle swarm optimization and a minimum fuzzy entropy algorithm, which reduced the total identification error to 1.89%. These studies provide some reference methods for coal gangue identification, however, due to the harsh environment of the top coal caving mining site, there are many influencing factors, such as dust, light, noise, etc., which will seriously affect the application of coal gangue identification in field conditions [
7,
13,
14]. Due to the obvious differences in physical properties between coal and gangue, when they are in contact with the hydraulic support, the vibration signals of the hydraulic support have different characteristics. Therefore, coal gangue identification based on vibration can effectively avoid the interference of many factors [
7].
When scholars study, however, the contact between coal gangue particles and hydraulic support, coal gangue particles are usually assumed to be spherical, square, ellipsoidal, and other ideal shapes [
15,
16,
17,
18]. Although this will simplify the analysis process, it is difficult to reveal the real contact process between coal gangue particles and hydraulic support. The influence of rock shape has been investigated in other research fields. Das [
19] simulated the brittle fracture of rock samples with different shapes in the impact process by using the smoothed particle hydrodynamics (SPH) method. It has been found that rock morphology has a great influence on fragment shape and energy dissipation. Gao [
20] analyzed the influence of end effect and shape effect on the mechanical and failure characteristics of rock specimens under uniaxial compression and found that the shape of rock affected the contour distribution and failure mode of equivalent plastic strain. Shen [
21] studied the influence of irregular rock blocks on the soil buffer layer above the shelf and found that the geometric shape of rock blocks had a significant indigenous influence on the force acting on the shelf. Zhao [
22] used a photographic system to reconstruct the model of rock aggregates and analyzed the influence of particle shape on the random packing properties of rock aggregates; it was found that the elongation index and flatness index had an important influence on the packing properties.
In summary, under the condition of regular shape, it has been proved that the vibration response caused by gangue is stronger than that caused by coal. However, due to the irregular shape and impact pose of the rock, the vibration signal strength caused by gangue is not always higher than that caused by coal. Existing research shows that the shape of rock is an important factor in the contact process between rock and hydraulic support, and it should be investigated more deeply.
To introduce real rock shape into the research of coal gangue identification based on vibration, three-dimensional (3D) laser scanning technology is used to obtain the shape information of the coal block. The real shape rock and hydraulic support models are established in LS-DYNA. First, based on the verified coal material model, the vibration response difference of the tail beam under the impact of coal gangue particles with 4 RMR is analyzed. The influence of falling velocity and coal strength on the vibration signals of 4 RMR are studied. Finally, the effect of the motion mode of coal gangue particles on the vibration response is analyzed and discussed. This paper provides directions for coal gangue identification based on vibration in top coal caving.
2. Methods and Methods
2.1. Particle and Hydraulic Support Model
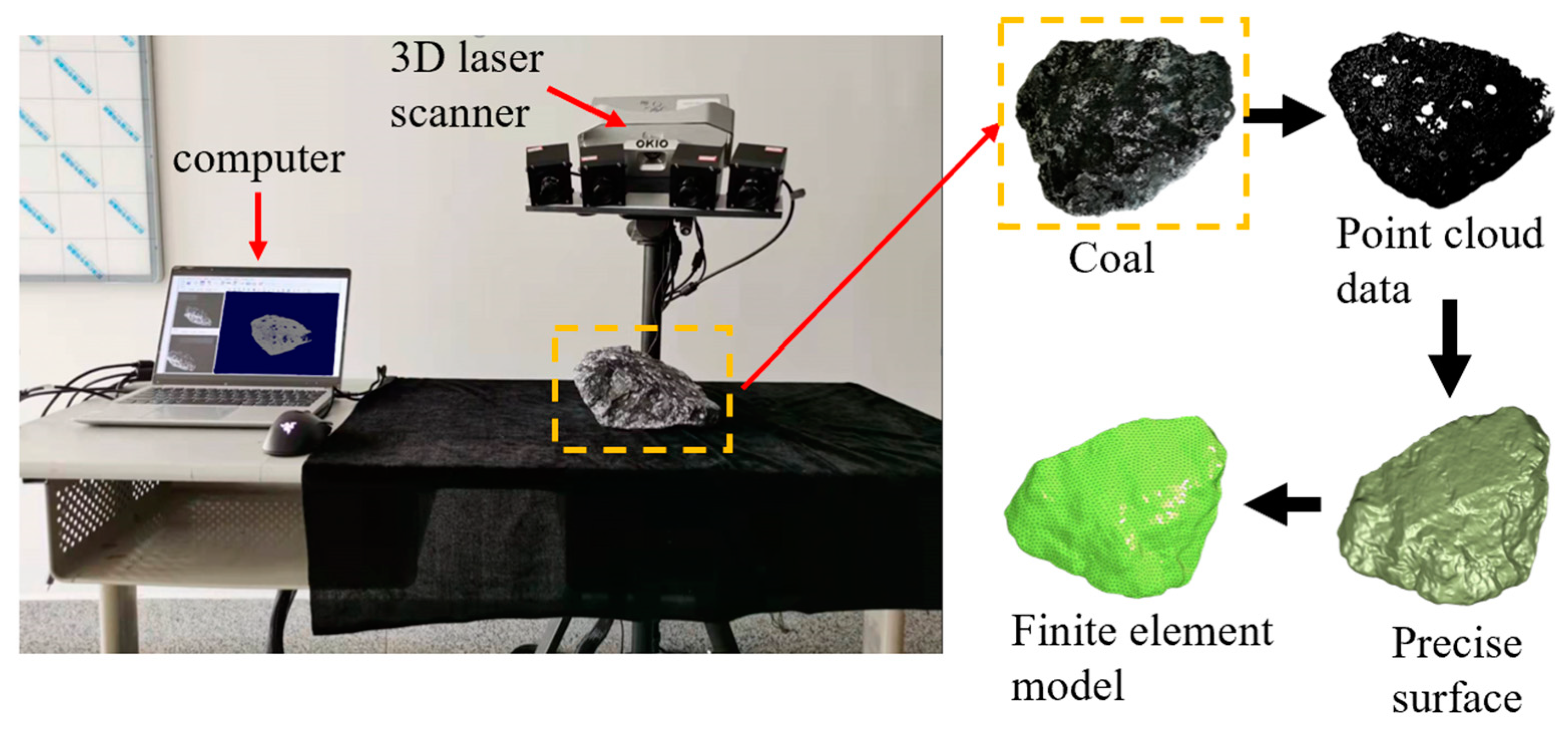
In this paper, a 3D laser scanner and finite element method are used to reconstruct the real shape of coal. The processing process is shown in
Figure 1. First, a 3D laser scanner is used to obtain the surface point cloud data of coal blocks. The point cloud data are then processed into precise surfaces in Geomagic Studio software. Finally, the model is divided into tetrahedral elements in HyperMesh to obtain the finite element model.
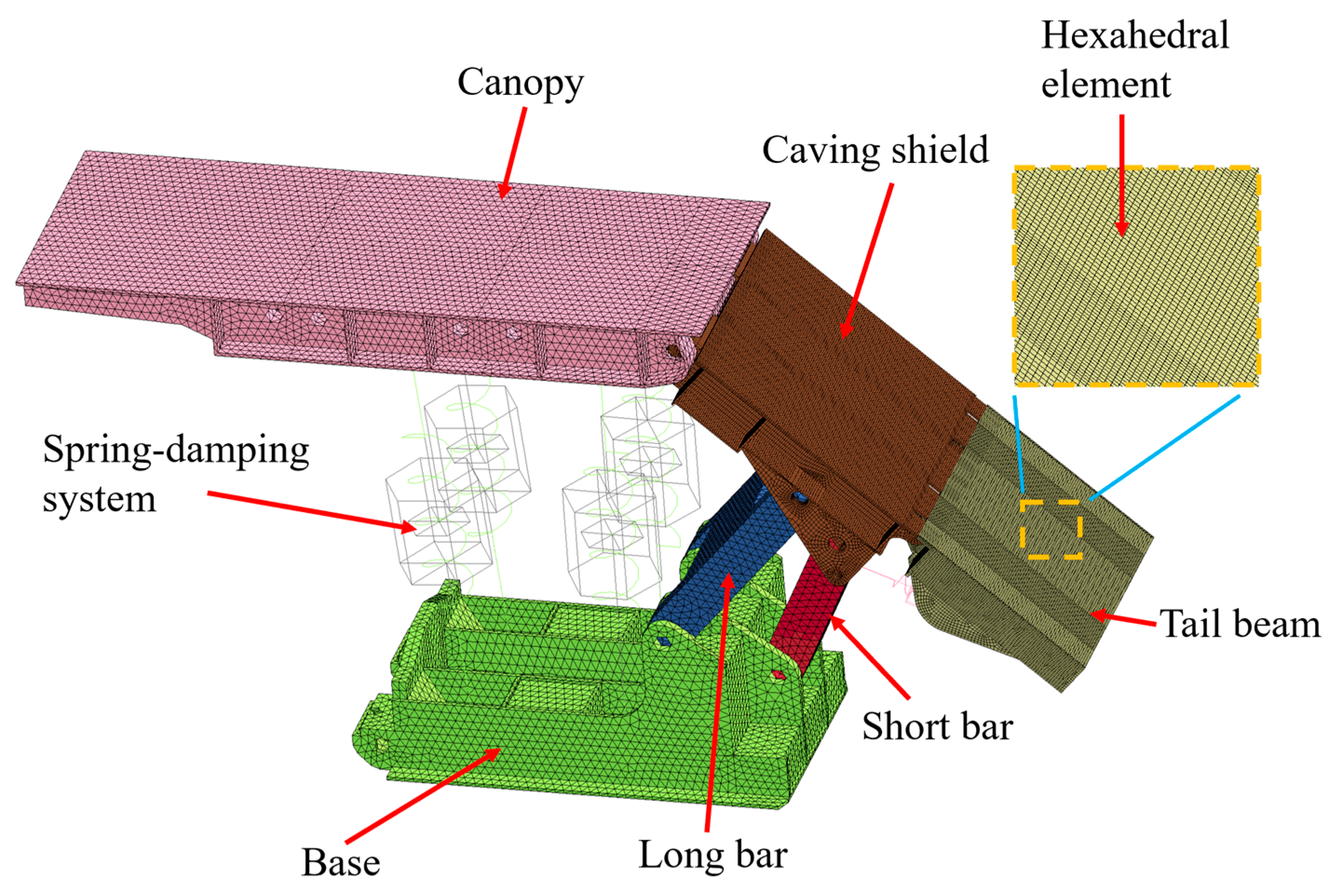
In this paper, a ZF4800-17-32 top caving hydraulic support is used as the research object, its working resistance is 4800 KN, the maximum and minimum working height are 3.2 m and 1.7 m respectively. The finite element model of the hydraulic support is shown in
Figure 2; the telescopic beam and insert plate and other structures were omitted in the process of modeling because they have little influence on the vibration response of the hydraulic support. Caving shield and tail beam are parallel, and the Angle with the ground is 40°. The hydraulic support model is meshed in HyperMesh. The main research objective of this paper is the vibration response of caving shield and tail beam, so these two parts are divided into hexahedral elements with higher accuracy [
23]. Other structures use tetrahedral elements, and the total number of elements is 233,472. The rotation pair in the hydraulic support is realized by creating a virtual rotation pair, and the hydraulic cylinder is assumed to be a spring damping system [
15].
The pre-processing was carried out in LS-PrePost, and the freedom of the nodes in the bottom layer of the base was fully constrained. The contact between rock particles and the metal plate is CONTACT_AUTOMATIC_SURFACE_TO_SURFACE. The hydraulic support is mainly made of welded steel plates. The Piecewise Linear plastic model in LS-DYNA was selected as the material model of the steel plate, and the parameters of the model are shown in
Table 1. MAT_JOHNSON_CONCRETE (HJC for short) is selected as the material model for coal and gangue. The HJC model can simulate the compressive damage behavior of rock mass after the impact [
24,
25]. Parameters of the HJC model for gangue and coal are shown in
Table 2 and
Table 3 respectively. The failure parameter
fc in the HJC model cannot simulate the failure of materials, so the keyword MAT_ADD_EROSION needs to be added to simulate the fracture of materials [
26]. Details of the model can be found in the citation [
27].
2.2. Verification of Coal Material Model
There are many natural defects and fissures in the interior of coal, and coal is more likely to be broken than gangue. The process of crushing will affect the vibration response, so the correctness of the material model parameters of coal needs to be verified. In this section, the coal drop test is designed. A steel plate is installed below the test bed, and the coal block is raised to 3.3 m from the steel plate; when the coal block falls from this height, the velocity of the coal before contact with the steel plate is about 8 m s−1. After the coal block impacts the steel plate, the breaking process is recorded by a high-speed camera.
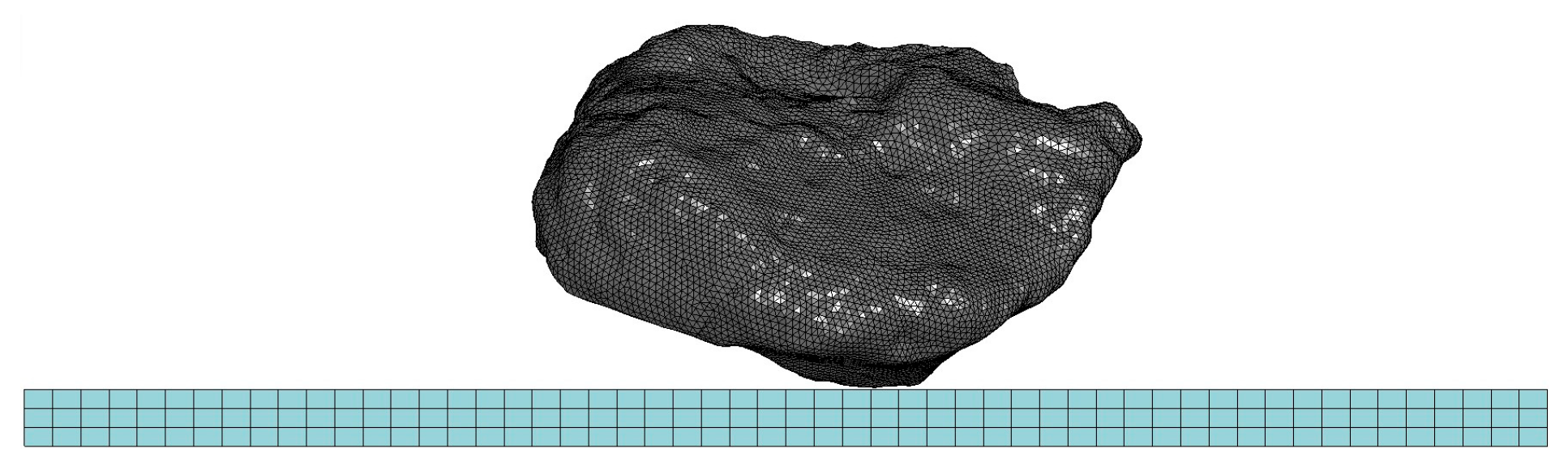
The finite element model of the coal drop test is shown in
Figure 3, the falling gesture of the coal is adjusted to be the same as in the coal drop test, the dimensions of the plate are, respectively, 400 mm, 400 mm, and 15 mm, the speed of the coal is set to 8 m s
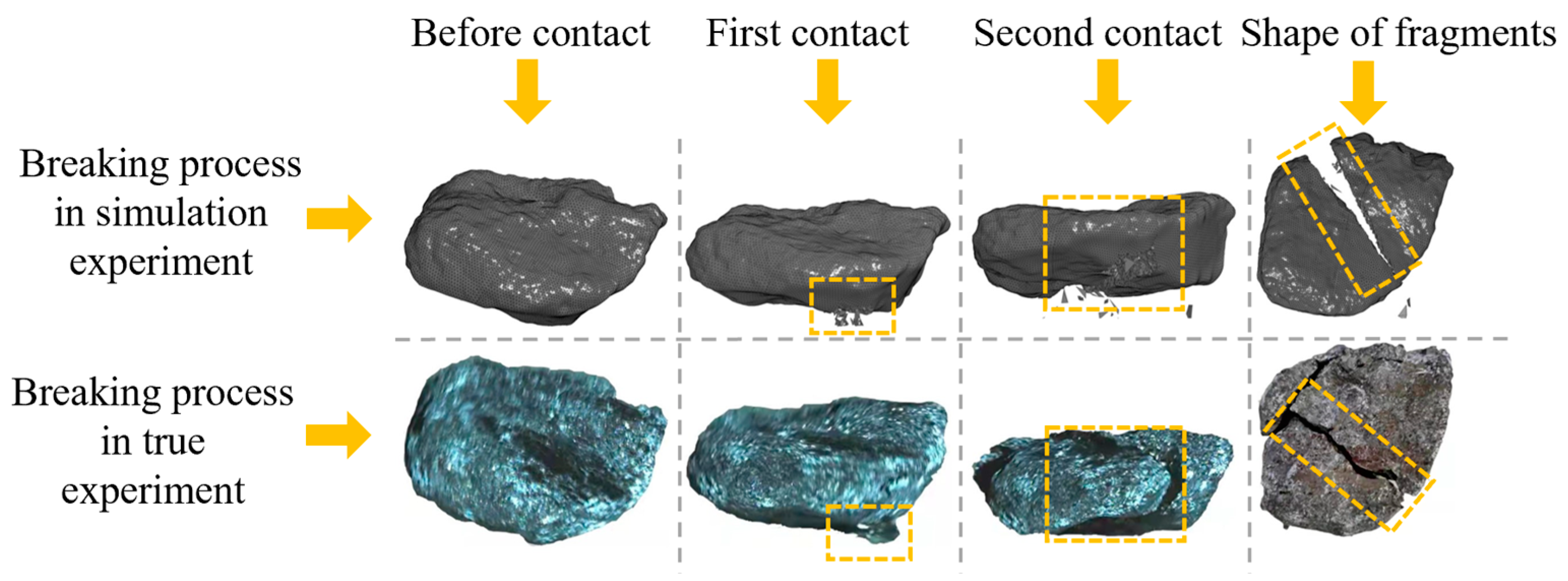
−1, the mass is 2.4 kg, the coal and steel material model and contact algorithm is the same as the above, the sides of the steel plate nodes are all constraints. The key moments of the coal breaking process in the two tests are shown in
Figure 4.
The coal block breaking process is mainly divided into the first and second contact. After the first contact, the position where the coal block hits the steel plate is broken, the impact expands the defects and fissures inside the coal block, but does not cause the whole fracture, then the coal block rotates in the air and the second contact occurs, the fissure is further expanded and connected and the coal block breaks into two large pieces. The crushing effect presented by the two tests is similar, so the test proves that the numerical simulation of the coal material model can simulate the real coal breaking process.
2.3. Differences between Ideal and Real Shapes
To explain the difference of vibration signals caused by rock particles with a real shape and an ideal shape, a numerical simulation test is designed in this section to simulate the process of a spherical and a real shape coal block impacting the metal plate along the direction perpendicular to the metal plate. The length, width, and height of the metal plate are 400 mm, 400 mm, and 10 mm, respectively. The mass of the two rock masses is 0.375 kg, and the falling speed is 8 m s−1. The material model of the coal and steel plate and the contact algorithm between them are the same as above. Five tests with different angles have been carried out for the two rock masses.
Extracting the velocity and acceleration signals within the impact area of the steel plate and calculating the effective value,
Figure 5 shows the changes in the velocity and acceleration of the five tests in which the steel plate was hit by two shapes of coal blocks and found that when the spherical coal block hit the steel plate, the changes in acceleration and velocity were negligible. However, when the real shape coal block hits the metal plate, the acceleration and velocity response are not only less intense than the spherical coal block but also there are obvious irregular changes. The reason is that the connection between the centroid of the spherical coal block and the position of contact is the same as the direction of speed, which can make the coal block transmit more energy to the metal plate, and because the true shape is extremely irregular, the position of the centroid of the coal block has been changing with the change of the fall angle, and the local shape of the area where the coal block comes into contact with the steel plate is also changing. Thus, the ideal shape used in the current study has great limitations, and it is not possible to simulate the process of contact between coal gangue particles and hydraulic support close to the real situation.
3. Results and Analysis
In the process of using the top coal caving mining method, a large number of coal gangue particles fall from the space above the hydraulic support, and the hydraulic support will be impacted by coal gangue particles. After analyzing the movement of coal gangue particles in the process of coal caving, this paper studies the impact process between coal gangue particles and hydraulic support, designing the simulation test of coal gangue particles with different RMR impacting the tail beam of hydraulic support, and studies the influence of falling velocity and coal strength. In addition, the motion mode of coal gangue particles on the hydraulic support is divided into three more complex situations: (a) Slip: Slip from static to down along the top of the caving shield. (b) Impact and slip: falling at a certain speed from above the caving shield. (c) Impact and roll: falling at a certain velocity and angular velocity from above the caving shield.
3.1. Multi-Particle Impact on Tail Beam
3.1.1. Coal Gangue Particles with Different RMR Impact the Tail Beam
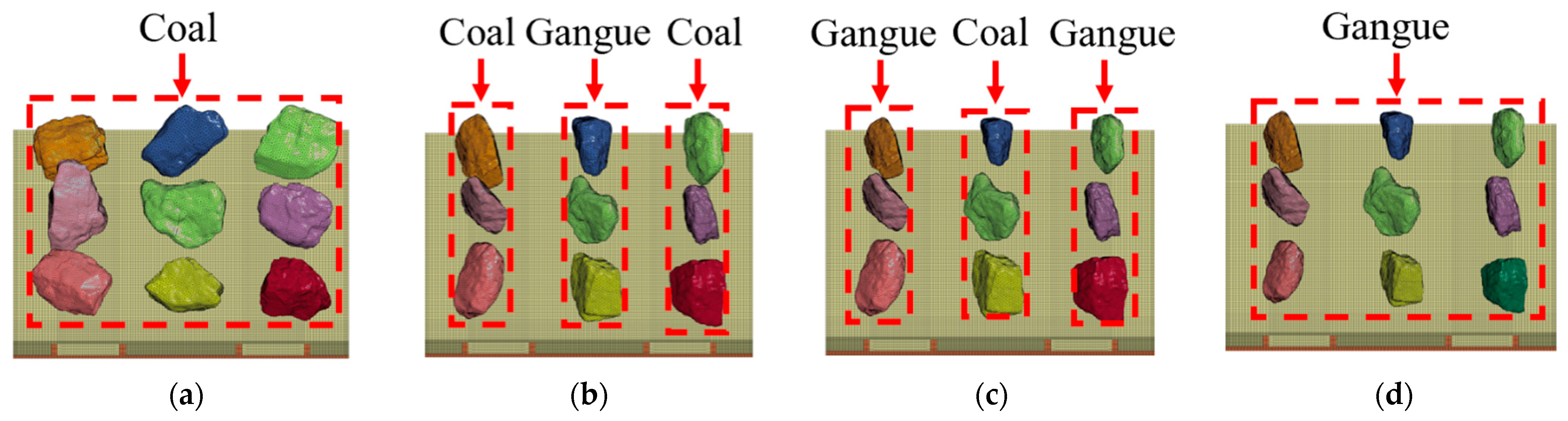
To study the difference in vibration response of the tail beam caused by coal gangue particles with different RMR, a series of calculation cases as shown in
Figure 6 are designed, in which the RMR is 0%, 33%, 66%, and 100%, respectively. The nine rock masses had the same mass, and the rock mass rushed to the tail beam perpendicular to the base at a speed of 8 m s
−1. Five tests were conducted for each RMR by changing the angle of the rock mass.
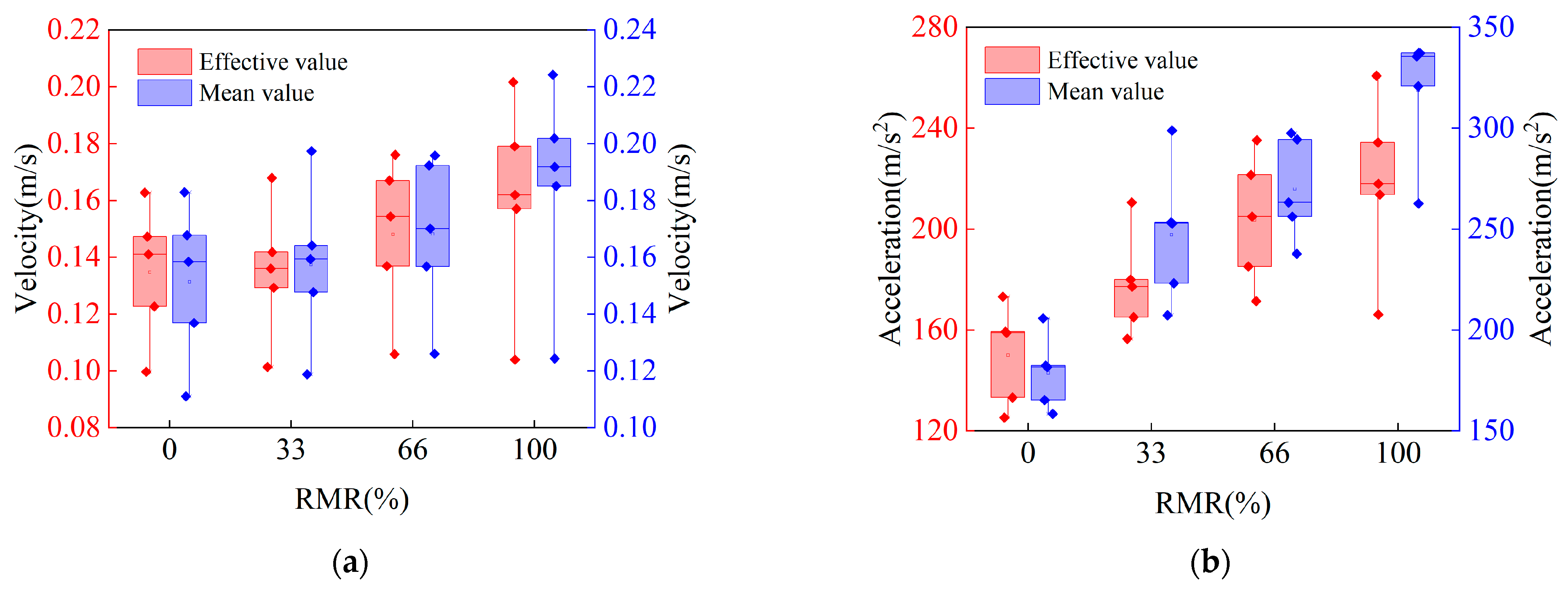
The average level of the computed signal is described by the mean of the resultant velocity and acceleration of the tail beam, and the average energy of the computed signal is described by the effective value of velocity and acceleration in the falling direction. The test results are shown in
Figure 7. It can be seen that under the same RMR the five vibration response results of the tail beam have obvious discreteness, which is related to the randomness of the contact state and reasonably reflects the randomness of the surface shape of rock particles with real shape. With the increase of RMR, the velocity and acceleration response of the tail beam show an increasing trend. The mean values of effective value and mean of velocity signal are 0.13472, 0.13534, 0.14808, and 0.16076, and 0.15154, 0.15752, 0.16822, and 0.18547, respectively. The mean values of effective value and mean value of acceleration signal are 150.09, 177.95, 203.7, and 218.62, and 178.79, 247.17, 269.91, and 318.75, respectively. Statistically speaking, the average energy and average level of vibration signal of the tail beam increase with the increase of RMR. This is because the contact stiffness and strength of gangue are much higher than that of coal. In the process of contacting with the tail beam, the gangue is broken to a smaller degree and consumes less energy, so it will transfer more energy to the tail beam in the process of impact.
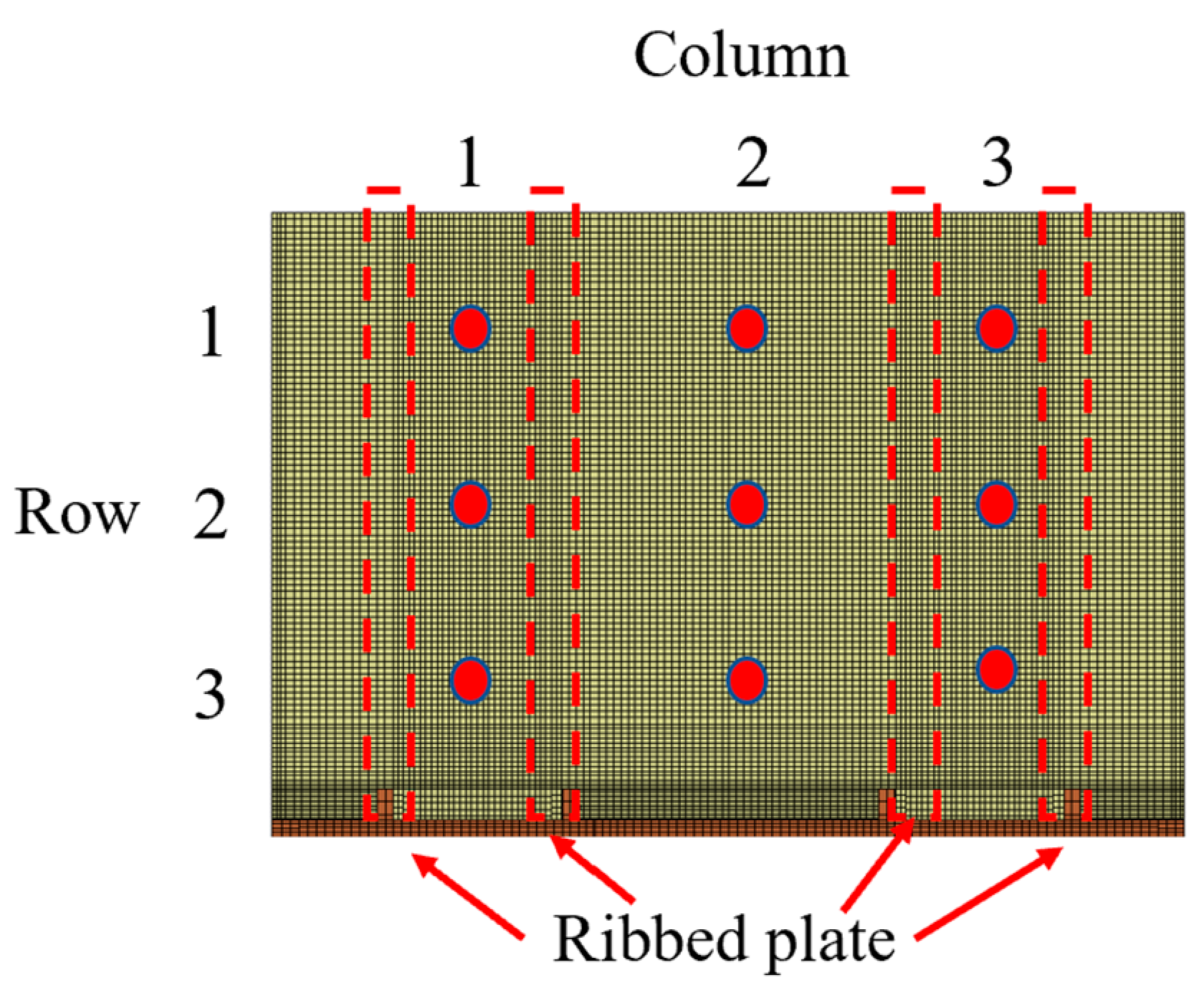
Five groups of tests with RMR of 0% were selected, and nine points were selected on the tail beam. The distribution of points is shown in
Figure 8. The mean values of the effective values of the velocity and acceleration signals of each point in the five tests were counted. The results are shown in
Figure 9, the vibration signals with large vibration amplitude are prone to appear at the positions of the first row and the second column. Because the first row is located at the end of the tail beam, far from the hinge point above the tail beam and the hydraulic cylinder in the middle, it will produce a larger deflection after impact. The second column is located near the centerline of the tail beam, far from the ribbed plate on both sides, which will greatly limit the free vibration of the tail beam. The results provide a reference for the arrangement of sensors on the tail beam.
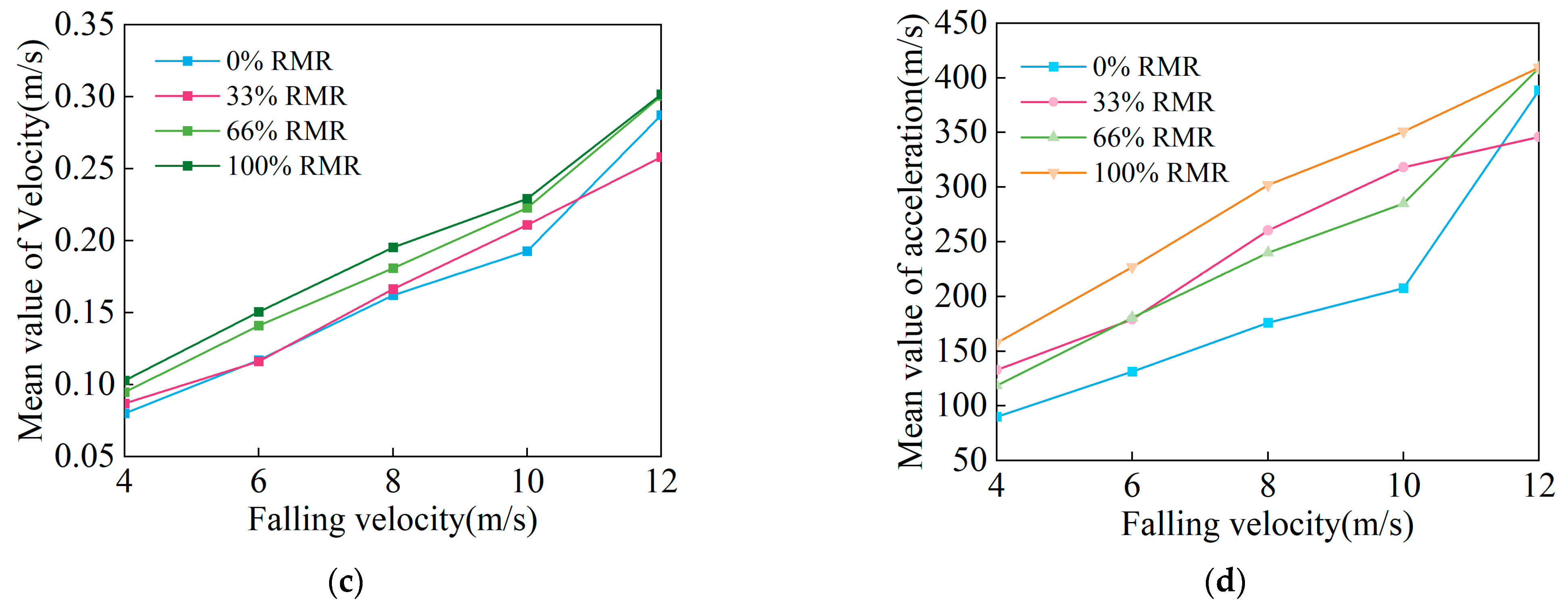
3.1.2. Influence of the Falling Velocity on Vibration Signal
In the study of coal gangue identification based on vibration, the geological conditions of different mining areas and the change of coal seam thickness are not negligible. The thickness of the coal seam determines the height of coal caving. This section studies how the signal difference caused by different RMR changes under different falling speeds.
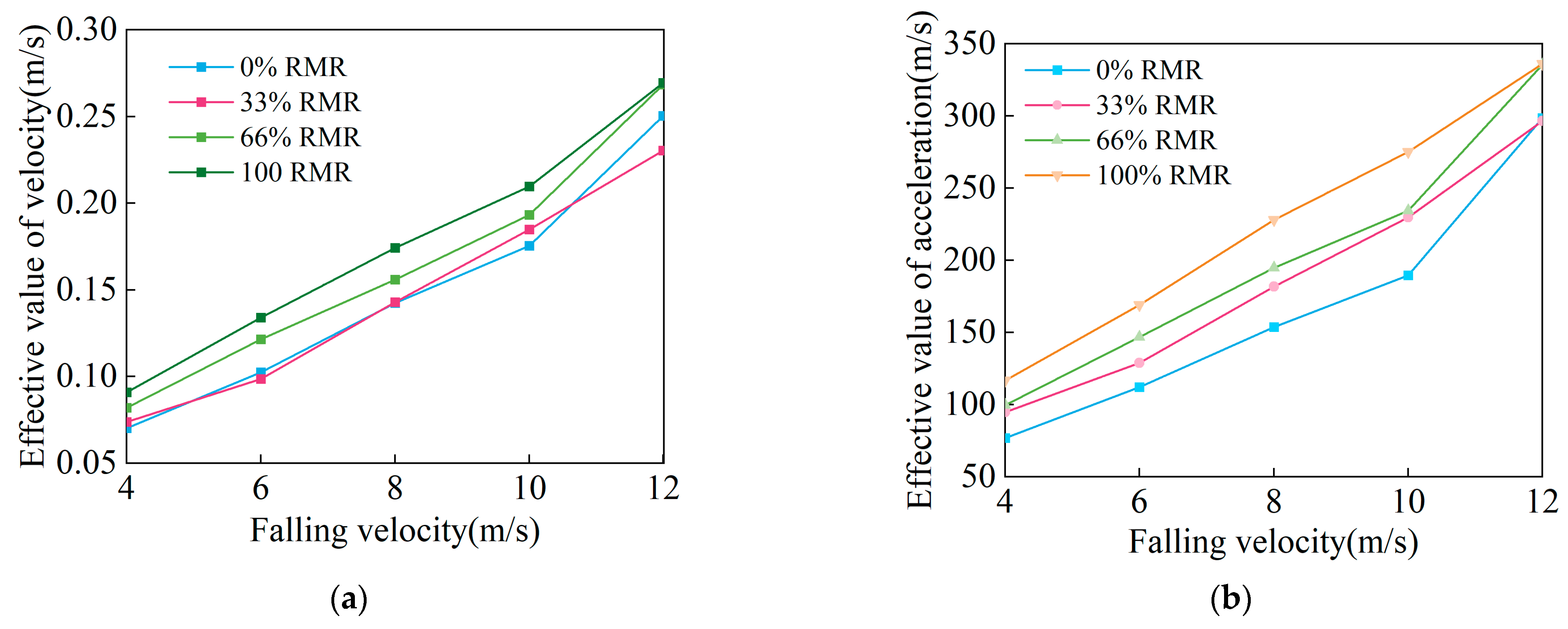
Keeping the other settings the same as the previous section, the coal gangue particles with four RMRs in the previous section were tested at different speeds, and the falling speeds were set to 4 m s
−1, 6 m s
−1, 8 m s
−1, 10 m s
−1, and 12 m s
−1. As shown in
Figure 10, due to the inhomogeneity of the surface shape of the coal gangue particles and the number of particles in the calculation not being very large, the influence caused by the change of the contact state of a single particle may be reflected in the overall result. In some calculation cases, the results deviate from the expected law, but on the whole, with the increase of the falling velocity, the average energy and average level of the vibration signal show a significant upward trend, and the coal gangue particles with different RMRs show obvious differences. This is because the increase of the velocity makes the rock mass carry more energy; therefore, the energy obtained by the tail beam during the collision is also increasing, indicating that the coal gangue identification based on the vibration may be identifiable at different coal caving heights.
3.1.3. Strength
Due to the different geological conditions, the strength of coal in different regions will be different, resulting in different degrees of coal fragmentation. Therefore, based on the model in the previous section, this section adjusts the strength of coal to five different strengths.
By adjusting the failure criteria in the keyword MAT_ADD_EROSION to control the strength of the coal material, a variety of strength tests were carried out for the RMR of 0%, 33%, and 66%. The failure criteria were set to 0.006, 0.008, 0.01, 0.012, and 0.014, respectively. The increase in the number represents the increase in the strength of the coal material model. The relationship between the failure criteria and the number of deleted elements of the coal is shown in
Figure 11. With the increase of the failure criteria, the failure elements decrease. The results show that as the strength of the coal increases. The degree of fragmentation is decreasing, which is in line with the actual situation of coal gangue particles impacting the tail beam of hydraulic support.
Figure 12 shows the relationship between the characteristic parameters of the vibration response of the tail beam and the failure criteria. In view of the velocity response, with the increase of the strength, the velocity response caused by coal gangue particles with higher RMR shows a significant upward trend, but the gap between them is gradually reduced. This is because with the increase of the coal strength, the strength of the coal and the gangue is gradually close, and the energy consumed by the crushing of the coal is gradually reduced, so the coal with higher strength will transfer more energy to the tail beam. This result shows that when the velocity signal is selected as the identification basis, the vibration-based coal gangue identification method will achieve better results in areas with large differences in coal and gangue strength. The response of the acceleration changes little with the increase of coal strength, because the mean value and the effective value of the characteristics of the acceleration are calculated within 0.02 s. The collision time between the rock mass and the tail beam is shorter than 0.02 s. When the strength of the coal increases, the contact force between the coal and the tail beam will increase, but the overall contact time is reduced. The acceleration calculated in this way is not sensitive to the change of the strength of the coal. It shows that when the acceleration signal is used as the judgment basis, the coal gangue particles with different RMR have an obvious difference in various mining areas under different geological conditions.
3.2. Influence of Motion Mode on the Vibration Signal
The impact behavior between coal gangue particles and hydraulic support studied in the previous section is the simplest contact mode between them. In this section, the motion mode of coal gangue particles is complicated, and three kinds of multiple impact motion are studied, namely slip, impact and slip, and impact and roll. Taking the vibration signals of the caving shield and tail beam as the research object, the changes of vibration signals caused by coal gangue particles with different RMRs under different motion modes are compared.
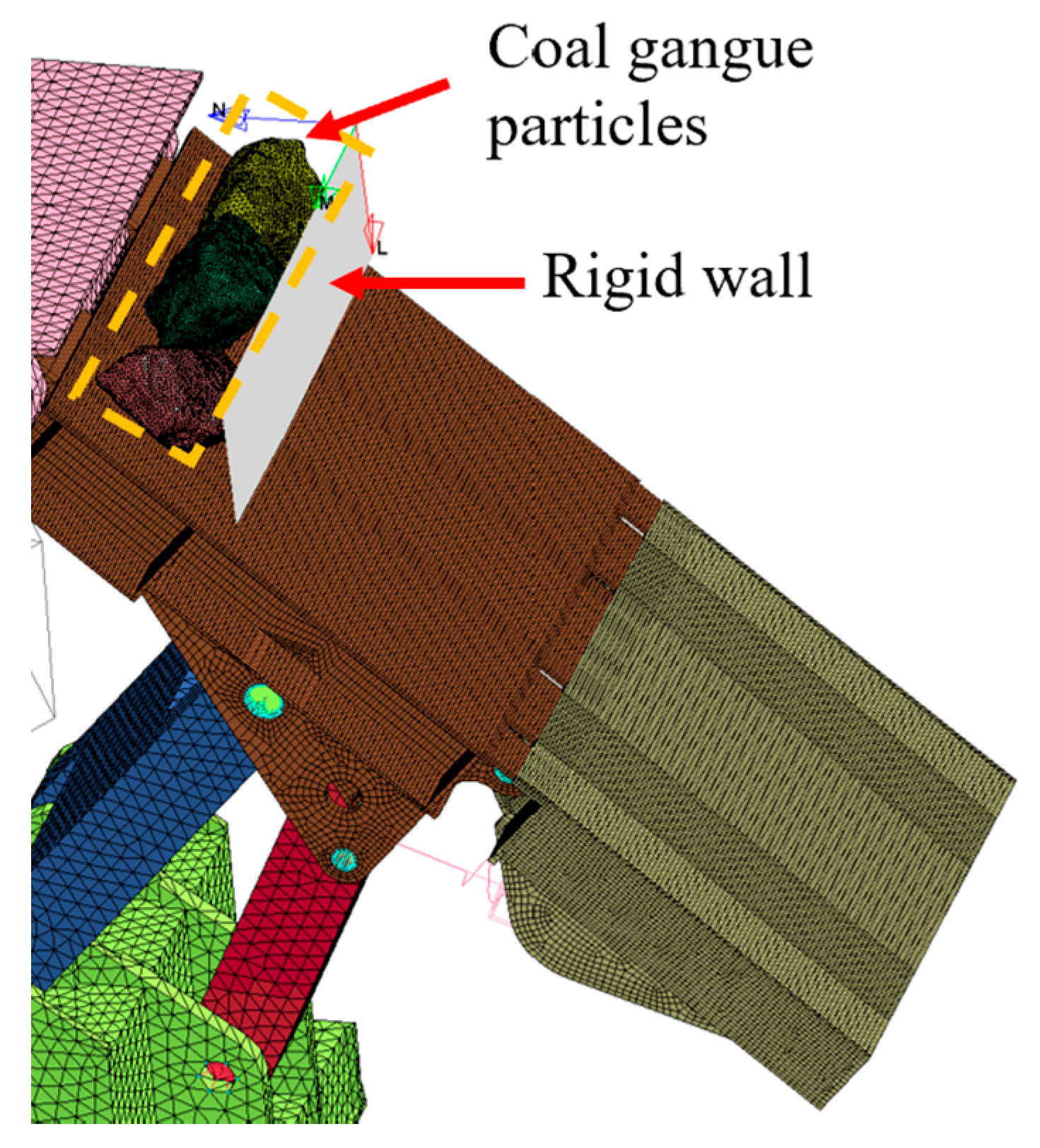
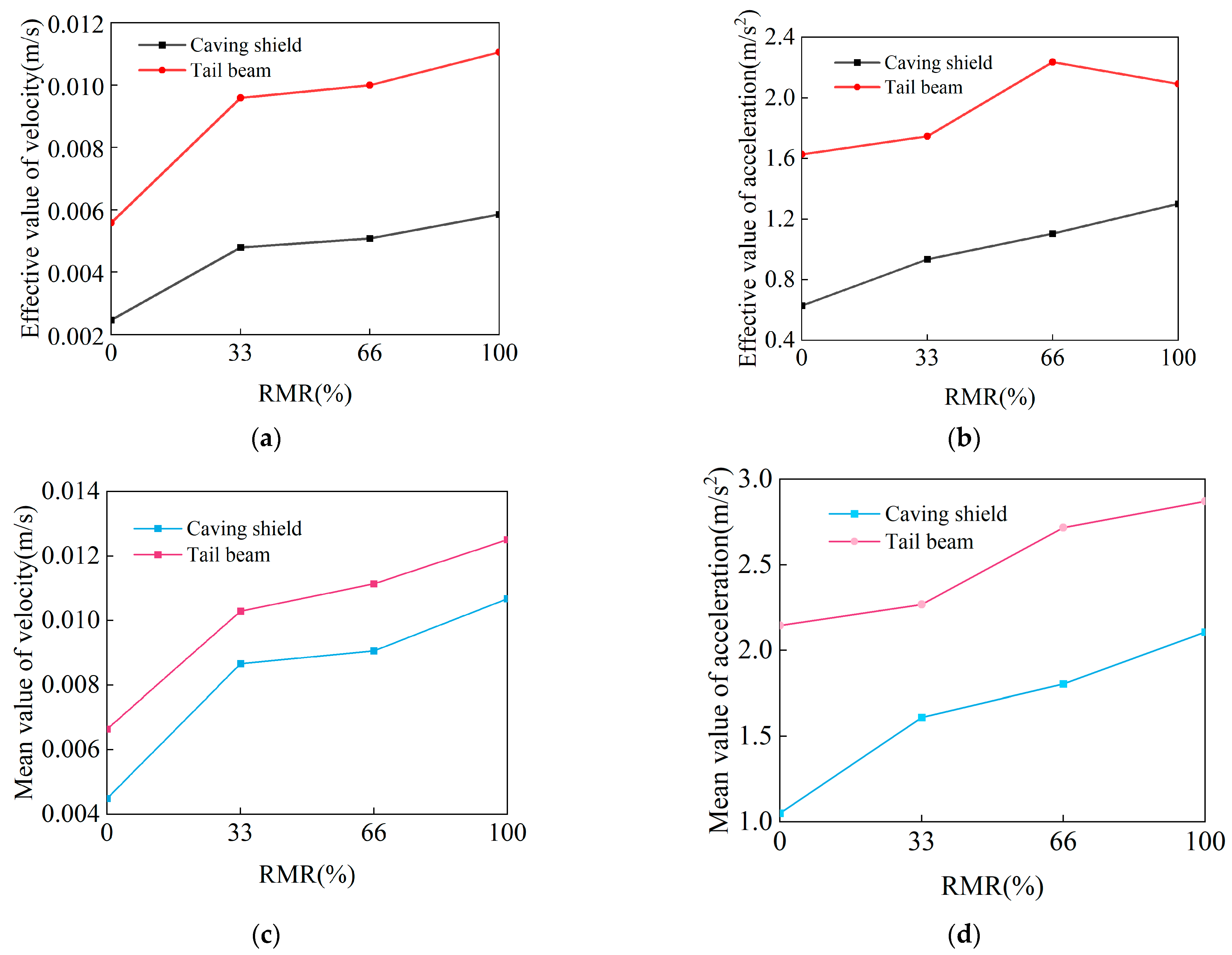
3.2.1. Slip
To study the response of the hydraulic support when the coal gangue particles are sliding on it, three coal gangue particles are placed above the caving shield in this section. The rigid wall is added to the position in
Figure 13. The rigid wall can prevent the coal gangue particles from sliding. Under the action of gravity, the three rock particles are stabilized on the side of the rigid wall. By setting the dead time of the rigid wall, the three rock particles begin to slide from the same height and time. The mass of coal and gangue particles was the same when the RMR was 0%, 33%, 66%, and 100%, respectively.
Figure 14 shows the relationship between the RMR and the two characteristics of the vibration response. With the increase of the RMR, the average energy and average level of the vibration signal of the tail beam and the shield beam show an upward trend, and the two characteristics of the vibration signal of the tail beam are significantly higher than that of the caving shield. There are two main reasons; one is that the caving shield is more stable due to the constraint, and the other is that when the coal gangue particles move to the top of the tail beam, they obtain more energy under the action of gravity. The results show that when the real shape coal gangue particles are sliding on the hydraulic support, the vibration response strength of the caving shield and the tail beam will increase with the increase of the RMR of the coal gangue particles.
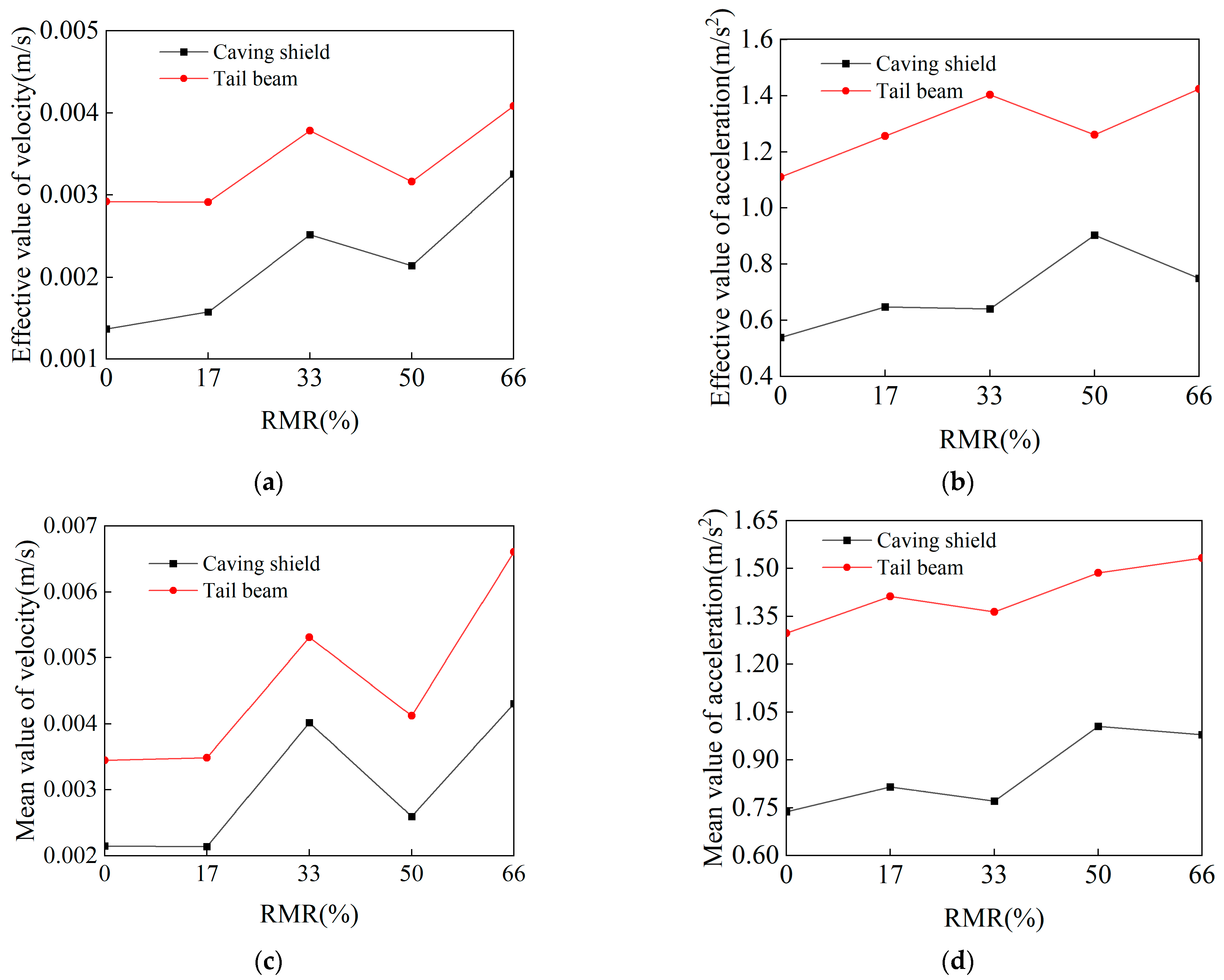
3.2.2. Impact and Slip
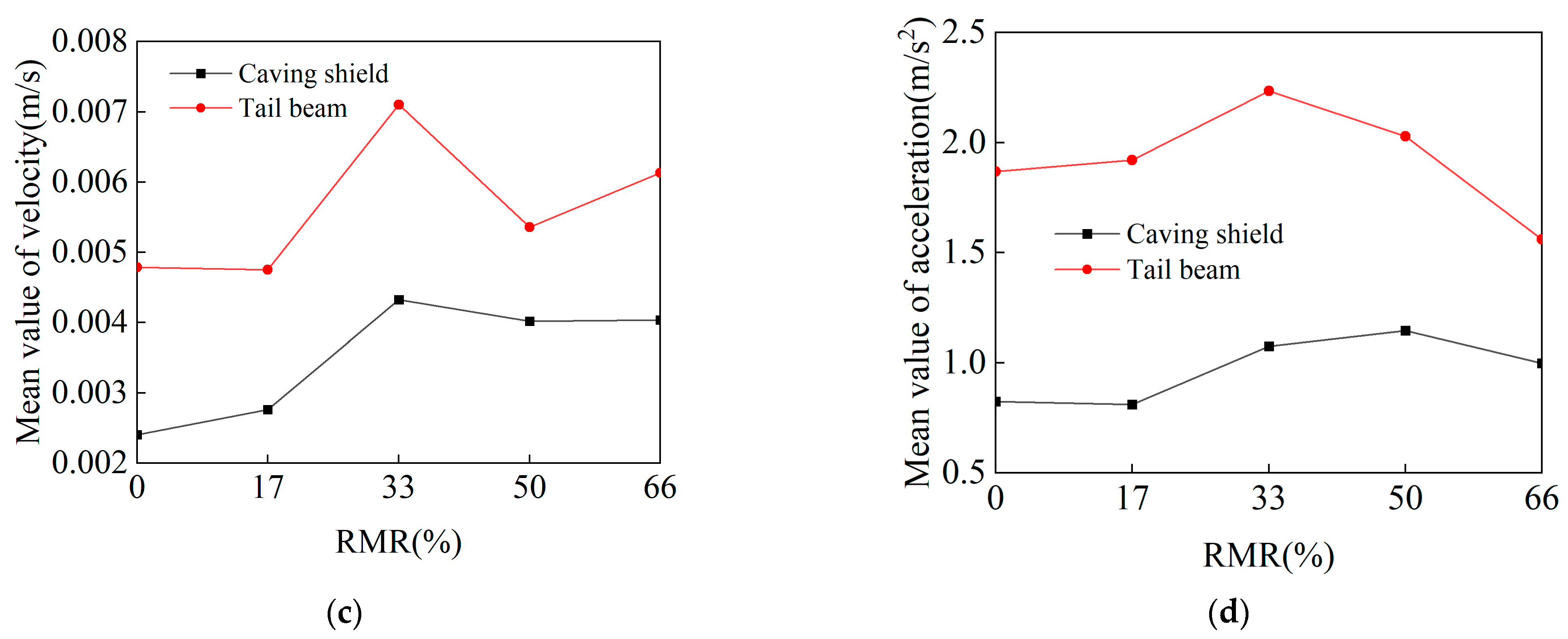
The previous section studied the relatively gentle contact between the coal gangue particles and the hydraulic support. However, in the real coal caving process, there is also a case of coal gangue particles impacting hydraulic support at a certain initial velocity. When the contact position was in the caving shield, the particle group rolled along the shield beam and the tail beam after the collision. Compared with the sliding process, this process was more intense. To study whether the coal gangue particles with different RMRs still had identifiability in this process, this section carried out a simulation test on the process of six coal gangue particles with the same mass and different shapes impacting and slipping over the caving shield at a certain initial velocity. The test simulated five different RMRs. They are 0%, 17%, 33%, 50%, and 67%, respectively. The falling speed of coal gangue particles is 1 m s−1.
After the coal gangue particles collide with the caving shield, due to the difference in surface shape, each particle bounces up at different angles and then collides with the caving shield and the tail beam many times. The whole process is more intense than the movement of coal gangue particles in
Section 3.2.1, but the coal gangue particles also do not have too much rolling movement.
Figure 15 shows the relationship between the RMR and the vibration response of the two components in the simulation. The curve shows obvious twistiness compared with the results of the previous section. Although the regularity of the curve is not as good as the motion state of the slip, the overall trend is still rising with the increase of the RMR. The twist of the line is because the shape of each rock particle is different. In the process of repeated contact between the rock and the hydraulic support, the contact position and contact attitude of each time are not the same, and they have strong randomness. These factors affect the efficiency of energy transfer from the rock particle to the hydraulic support in each collision, but the overall trend is not significantly affected because of the large number of contacts.
3.2.3. Impact and Roll
In this section, we adjust the initial state of coal gangue particles to have velocity and angular velocity in a numerical simulation to understand whether it still has the identifiability of RMR when it contacts with hydraulic support in a more intense motion. Based on the model in
Section 3.2.2, 30 rad s
−1 angular velocity and 1 m s
−1 velocity are applied to coal gangue particles. The simulation experiment simulated five different RMR of 0%, 17%, 33%, 50%, and 67%.
The movement process of coal gangue particles was observed, and it was found that the distance between the two collisions of a single particle was significantly longer. The contact times of six particles with the caving shield and the tail beam were counted. The results are shown in the
Figure 16. The number of contacts with the tail beam were significantly greater than the fluctuation of the caving shield. This is because the velocity of particles moving on the tail beam was faster than that on the caving shield, so the distance of coal gangue particles flying after bounce was farther.
The fluctuation of contact numbers directly affects the vibration signals of the caving shield and tail beam.
Figure 17 shows the relationship between the RMR and the vibration response of the caving shield and the tail beam under the initial state of the coal gangue particles with velocity and angular velocity. Compared with the results in
Section 3.2.2, the results are more tortuous, and both the characteristics of velocity and acceleration have lost a clear overall trend. The results show that in this case, the coal gangue identification method based on vibration cannot detect the change of RMR.
In conclusion, it can be said that the identification effect of the coal gangue identification method based on vibration on the RMR of coal gangue particles moving in different ways is different. When the coal gangue particles slide along the hydraulic support, the effect of identifying the change of RMR by the vibration of the shield beam and the tail beam is the best, and the impact and slip are in the middle, while the impact and roll are the worst. Therefore, during coal caving, we should make sure that the coal gangue particles should slide on the hydraulic support as far as possible and reduce the free rolling of coal gangue particles.
4. Conclusions
This paper studied the relationship between RMR and the dynamic response of hydraulic support under the impact of coal gangue particles, focusing on the real shape of the rock. The finite element model of real shape rock and hydraulic support are established in LS-DYNA. The effects of RMR, velocity, coal strength and motion mode on the vibration response of hydraulic support are studied, and the following conclusions are obtained:
- (1)
The average level and average energy of the vibration response of the tail beam will increase with the increase of the RMR of coal gangue particles, indicating that the change of the RMR can be identified by obtaining the characteristics of the vibration signal.
- (2)
When the coal gangue particles impact the tail beam of the hydraulic support, the coal gangue identification based on vibration has good identification ability for the RMR at different falling speeds, indicating that this method can be used in the mining field with different coal caving heights.
- (3)
When the average energy and average level of vibration signals in a certain time are used as the judgment basis, the increase of coal strength will reduce the discrimination of velocity response caused by coal gangue particles with different RMRs, but it will not affect the discrimination of acceleration signals. Thus, the acceleration signal has higher reliability than the velocity signal.
- (4)
Different motion modes of coal gangue particles will make the effect of coal gangue identification based on vibration different. When the coal gangue particles slip on the hydraulic support, the identification effect is the best, while the identification effect of impact and roll is the worst.
Due to the limitation of calculation time, the number of rock particles used in this paper is not large enough to simulate the real coal flow. In future research, we will find more efficient numerical simulation methods to simulate more real coal caving processes.
In this study, the contact process between coal gangue particles and hydraulic support is studied more realistically, and the results provide a reference for the further study of coal gangue identification based on vibration.























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}